1. Introduction
Nowadays, shipping has undertaken a huge amount of transportation due to its low cost and economy. With the increase in waterway transportation volume, more ships will be navigating in busy and congested waterways. For ferries, the waterways’ environment and encounter situations are complex, which will threaten navigation safety if decisions are made improperly. Although some studies have been carried out to predict environmental and operational scenarios, ferries are also faced with unknown and uncertain factors derived from encountered ships and the environment. The ferry should reach the endpoint to deliver goods and/or customers; meanwhile, they need to avoid collision with other ships. Hence, path planning and collision avoidance is one of the key issues for inland ferries.
For ships navigating in open waterways, long term path planning aims to plan a route in advance. However, ships navigating in narrow waterways need short-term path planning focusing on collision avoidance. In fact, path planning for narrow waterways should consider local collision avoidance together with a path from the start point to end point. Moreover, in congested waterways, the probability that one ship reacts to avoid collisions with more than one ship is likely to increase, thereby making collision avoidance decision-making more complex. Thus, an intelligent and autonomous path planning method considering all trajectories’ decisions throughout the whole journey is needed to support human decisions.
In this study, an autonomous ferry-crossing navigation decision–support model is proposed, considering economy and safety based on deep reinforcement learning. The action space and state space are modified in order to adjust to the inland ferries.
2. Literature Review and Motivation
Many path planning methods for ships have been proposed extensively. In general, path planning can be divided into global path planning and local path planning. Global path planning refers to finding a long-term route that can avoid collisions with static obstacles and dynamic obstacles. Local path planning mainly refers to a path derived from collision avoidance decisions. Global path planning is utilized to find an acceptable path before navigation [
1], and local path planning focused on short time and real time paths formed by anti-collision actions [
2]. In general, path planning algorithms can be classified into two main categories: the classical algorithms and intelligent algorithms [
3,
4]. The former is usually utilized in global path planning. For classical algorithms in global path planning, the grid based algorithm and sampling-based algorithm are the most common ones, such as A*, D* and RRT (Rapid-exploration Random Tree). The grid based algorithms aim to search for grids by defining cost values for every neighbor point [
5]. The iterations are updated until the path is finished. In most cases, the grid based method are utilized in known navigation environments [
6,
7,
8,
9]. The sampling-based algorithms are conducted by determining adaptive steps to achieve efficient path planning. These algorithms are primitively utilized in static path planning. In order to extend their applications, some studies made improvements from the view of a time slice [
9]. However, these improvements would increase the calculation to a large amount. Then, the jump point of grid based algorithms together with a dynamic window are raised to reduce the calculations.
For local path planning and collision avoidance, some indexes such as DCPA (distance at closest point of approach), TCPA (time to the closest point of approach) and relative distance are utilized to assess the collision risk between two encountered ships, and subsequently, reciprocal or distributed collision avoidance decision algorithms are formulated to make anti-collision strategies [
10,
11,
12]. However, these studies are based on the identification of all encountered scenarios, and their strategies are determined subsequently [
13]. If there is a scenario that is not identified in early times, these models may result in failure. They are not robust and resilient when facing environment changes. Moreover, they are more suitable for open waterways and do not perform well enough to manage a large number of moving obstacles in narrow or complex waterways [
4,
14]. In order to assist autonomous navigation, some researchers make a combination of global and local path planning. Song, A.L et al. [
15] established a two-level dynamic obstacle avoidance algorithm to achieve global path planning and local collision avoidance. The two levels are divided by defined thresholds which separate the entire path into nonemergency and emergency situations. However, this division sometimes may be trapped into local optimization, especially in a multi-ship encounter situation.
In summary, traditional algorithms lay a solid foundation for the development of path planning. However, they have some disadvantages in dealing with complex environment and autonomous navigation. Firstly, they usually fall into local optimal solutions. Secondly, the path planning strategies stored in the decision system are not sufficient to face dynamic obstacles, and any slight changes will result in planning failure. Thirdly, their abilities to interact with the environment are quite limited even when some traditional algorithms are improved in the time dimension. Fourthly, their ability in the integration of global and local path planning should be further improved.
Therefore, it is particularly important to formulate intelligent algorithms to fill the gaps. Intelligent algorithms are also called model-free algorithms. They can adapt to complex situations by interaction and communication with the obstacles. Among the intelligent algorithms, DRL (Deep reinforcement learning) makes a combination of DL (deep learning) and RL (reinforcement learning). DL is capable of perception capability, while RL has the decision-making capability. Thus, DRL has human-level decision-making capabilities to deal with high-dimensional sensory input and actions. Deep Q-network (DQN), combining DL and Q-learning, was first raised in [
16]. It improves the stability of the combination [
17] and allows the agent to modify its strategy according to the received reward or punishment. Due to the ability of DQN, it has been utilized in robot and vehicle path planning. Yuan, J et al. [
18] established a double DQN algorithm for an autonomous underwater vehicle to avoid collision with moving obstacles considering running time, total path and planning time. Bhopale, P et al. [
19] modified a traditional Q-learning algorithm to deal with multiple obstacle avoidance problems for autonomous underwater vehicle. Meanwhile, DQN has been conducted to model ship path planning and navigation in some recent studies. Shen, H et al. [
20] developed a DQN based approach for automatic collision avoidance of multiple ships incorporating ship maneuverability, human experience and navigation rules. Wang, W et al. [
21] integrated COLREGs into the DRL algorithm and trained over multiple ships in rich encountering situations. These studies show that the application of DQN in path planning is promising, especially for the autonomous navigation of ships. In contrast with common ships, path planning for ferries in congested waterways has some inherent travelling patterns, which are dependent on seamanship and navigation rules for ferries. Thus, path planning for ferries should be further studied to promote autonomous navigation, especially in complex and congested waterways. During path planning, some mandatory rules should be followed, such as COLREGs and other related ferry rules. For ferry encounter situations, rules of crossing are different from other encounter situations, especially in the inland waterways of China.
Motivated by these studies and problems, we extend our previous studies on ferries to learn an autonomous path planning policy based on DQN [
22,
23]. In this study, an autonomous path planning model based on DQN is raised by recognition of ferries’ crossing patterns defined by navigational experience and rules. This model can achieve autonomous path planning as defined by crossing patterns.
The remainder of this paper is organized as follows.
Section 3 provides a brief overview of the formulation of autonomous path planning for ferries.
Section 4 introduces the construction of a DQN-based path planning algorithm. The case studies are presented in
Section 5. Conclusions and future work are presented in
Section 6.
3. Construction of Autonomous Path Planning for Ferries
For the autonomous path planning of ferries, the main point is how to travel in a safe and efficient way. Safety and economy are the two conflict indexes. Therefore, path planning for ferries attempts to find a compromise between them. Economy is mainly referred to as the shorter path to reduce fuel and time consumption. Safety is determined by travelling relative distance and ship domain. Since the paths are short in ferry crossing situations, environment factors such as bathymetry and current only have limited influence on a short route (Tan et al., 2018), thus, such factors are not considered in this research.
3.1. Rules for Ferry Navigation
Before DQN-based path planning model construction, crossing patterns of ferries should be specified in the first place. Usually, a ferry should abide by COLREGs in open waterways. In congested and coastal waterways such as Dover Strait [
24], Alesund area of Norway and the Gulf of Finland [
25], a ferry should also follow COLREGs. However, in inland waterways of Yangtze river, rules have been adjusted based on COLREGs, especially when a ferry cross the channel. In order to clarify the encountered situations and responsibilities, a first-person perspective is implemented. The similarities and differences discussed in [
26] are listed as follows:
- (1)
COLREGs for normal ferry navigation
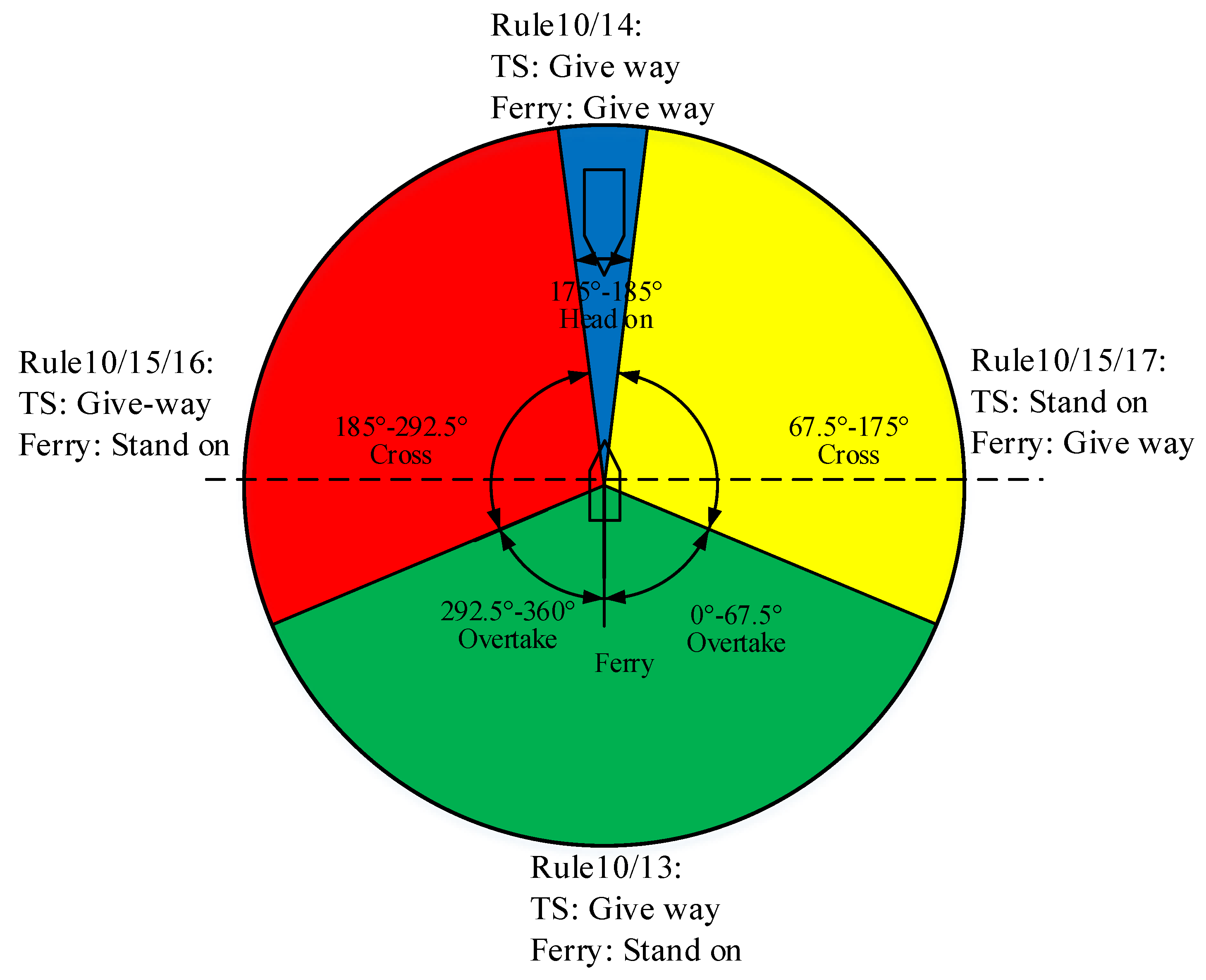
When navigating in the channel and encountering other ships, a ferry may be involved in crossing, overtaking and head-on situations, similar with normal ships. For a ferry’s normal navigation, they should follow COLREGs to avoid collisions [
27,
28]. The relevant rules with respect to collision avoidance for ferries are Rule 10, Rule 13, Rule 14, Rule 15, Rule 16 and Rule 17. Rule 10 applies to traffic separation schemes. Rule 13, Rule 14 and Rule 15 apply to overtaking, head on and crossing situations. Rule 16 and Rule 17 determine actions taken by given-way ships and stand-on ships. For ferries’ normal navigation, four different encounter scenarios and their anti-collision responsibility according to COLREGs are demonstrated in
Figure 1.
- (2)
Rules for ferry crossing the channel
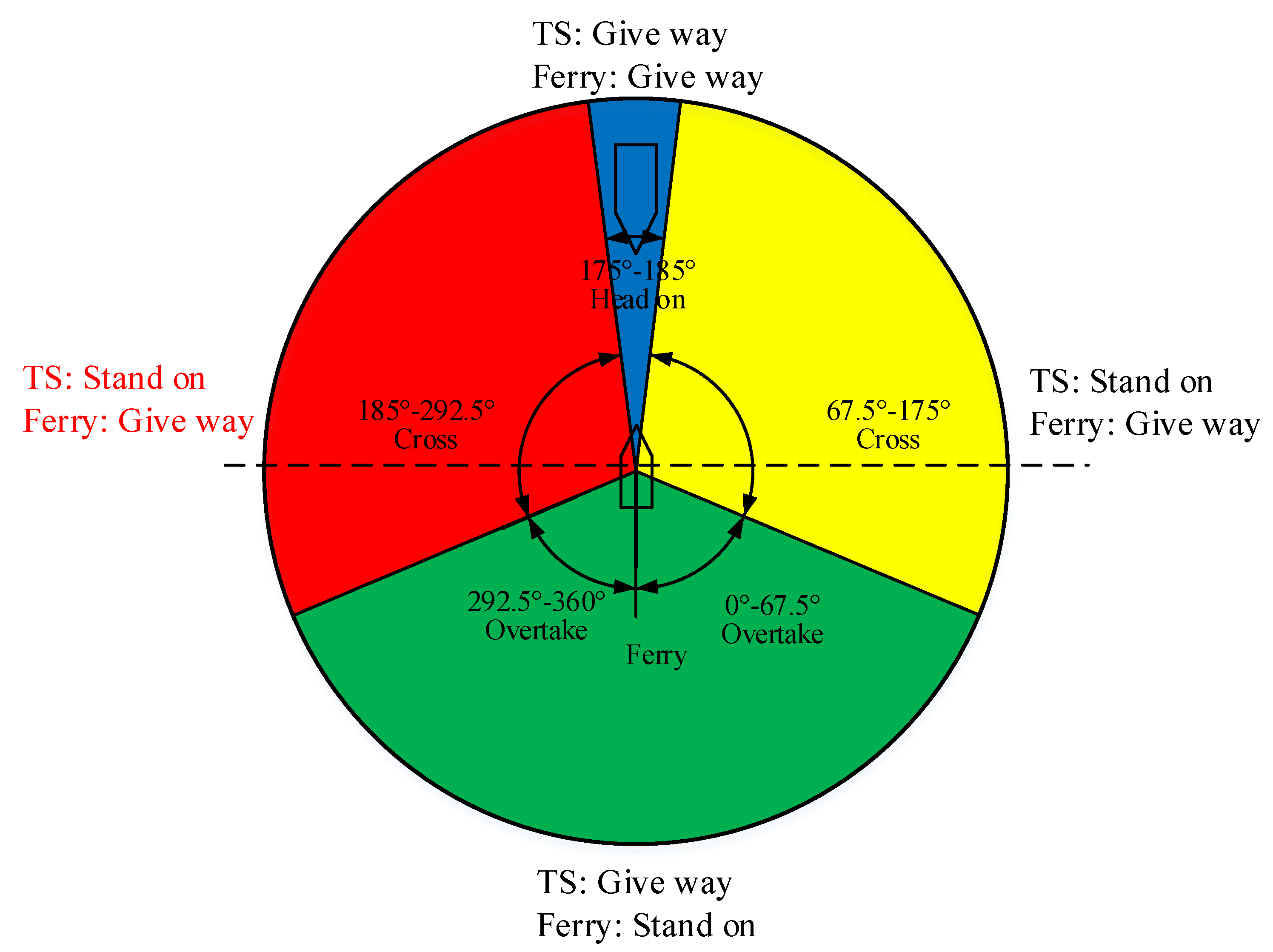
Compared with the normal navigation of a ferry, crossing the channel is a typical navigation pattern, which creates crossing encounter situations with target ships. Therefore, the Rules of People’s Republic of China for Avoiding Collisions were created to further describe the responsibilities of a ferry. The relevant rules are Rule 9 and Rule 14.
Rule 9: During the process of avoidance, the giving way ships should take actions to avoid the given way ships, and the given way ships should also pay attention to the actions of the giving way ships.
Rule 14: When ferries encounter other ships traveling along the channel or river, ferries must take avoiding actions. Travelling from the bow of other ships arbitrarily is forbidden for ferries.
Rule 9 determines anti-collision responsibilities in accordance with COLREGs. Rule 14 explains actions that a ferry should take to avoid collision when crossing the channel. What is more, crossing patterns when a ferry crosses the channel have been clarified as travelling from the bow and stern of target ships in the Yangtze River. When a ferry crosses the channel, four encountering situations are also created, similar with normal navigation. The responsibility for the four scenarios when a ferry is crossing the channel, according to COLREGs and Rules of People’s Republic of China for Avoiding Collisions, is shown in
Figure 2.
As shown in
Figure 2, ferries should take actions to avoid collision in cross situations. To follow the inland rules, there are two problems that ferries have to deal with. Firstly, inland waterways are narrow and congested, and multiple ships are involved in encounter situations. A ferry needs to decide on travel from the bow or stern of target ships. Travelling from the stern of one target ship will result in travelling from the bow of others. Rules for a ferry crossing the channel are ambiguous when target ships travel from the left side of ferries. The crossing risk, such as relative crossing distance, is not specific, which will result in confusion for navigators. Secondly, travelling from the bow of target ships will be safer and more economical than from the stern of target ships in some encounter situations. Crossing patterns should be further quantified. Navigation experience is a good reference [
29], and crossing patterns can be inferred from navigation experience by the FCPD (Ferry Crossing Patterns Determination) model based on machine learnings algorithms. Moreover, Xgboost shows better performance than other machine learning algorithms as discussed in [
26]. Then, the predicted crossing patterns will be served as inputs for state space.
3.2. Collision Risk
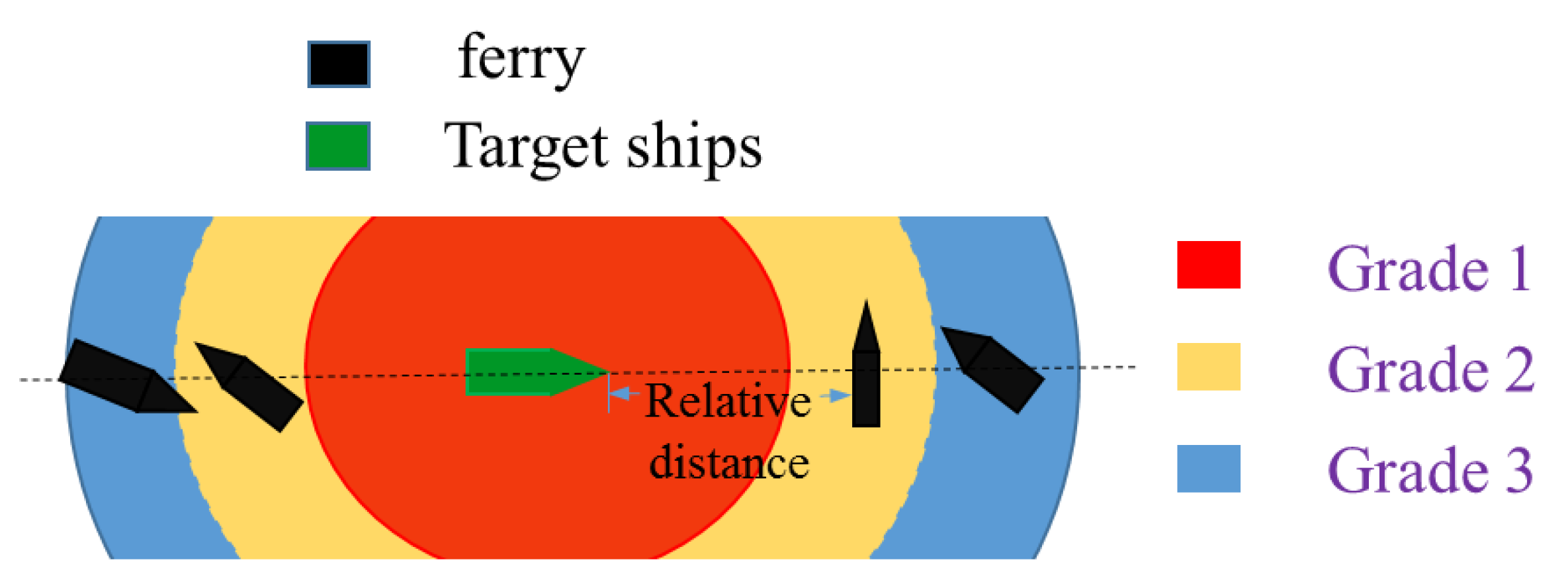
The collision risk of a ferry can be simplified as the relative distance between a ferry and a target ship. Considering navigation rules of inland waterways and crossing patterns, a ferry’s relative distance and collision risk can be divided into three levels, namely, Grade 1, Grade 2 and Grade 3, as shown in
Figure 3. The collision risk of a path can be expressed as collision risk at every time slice.
As described in [
26], crossing grades are described as follows. The boundary of every grades is fuzzy and can be determined by historical travelling data and expert experience. Grade 1: This area is called the critical area. It is formed by a ship domain where the crossing actions are forbidden. Crossing actions that lead to violating this area should not be allowed. However, inland waterways are narrow and congested, and some crossing actions are still taken in this area in historical encounter situations. Thus, rewards will be utilized to find a balance between safety and economy which will be solved by DQN. Grade 2: The yellow area is constrained by Grade 1 and Grade 3. Most of the navigators take crossing actions in this area. When complex encounter situations occur, the ferry will choose a series of satisfactory actions to meet the economy and safety requirements based on rewards. The crossing’s relative distance within this area will result in a Grade 2 collision risk of path. Grade 3: At long range, crossing patterns rarely occurred in this area. Crossing operations in this area are time consuming and are usually not preferable. Some crossing actions are still taken in this area in historical encounter situations because navigators are risk averse. Thus, collision risk of DQN based path planning can be updated considering a navigator’s risk preference. We use
to describe collision risk grades of ferry.
3.3. DQN Configuration
Intelligent or autonomous path planning are comprised by manned or unmanned path planning. There are three categories, namely, fully unmanned path planning, partly unmanned path planning and fully manned path planning. Although the path planning method raised in this paper can be utilized in fully unmanned path planning, human operation should also be considered. Then, a key point should be solved when the system is authorized to command and when a human operator must take over, since the ferry crossing route is short and there are crossing situations near the start-point and endpoint of path. Hence, the autonomous path planning system is authorized to command when a ferry starts to travel. The navigators can take over the command when the crossing actions are finished and the crossing encounter situations are solved. The alternation of autonomous system and human operation can be determined by navigators. For autonomous path planning, it can be defined based on the sequential decision-making problem. The Markov Decision Process (MDP) is typically utilized to model sequential decision-making problems. In MDP, the decision-maker, who is called an agent, executes an action in the environment, and the environment, in turn, yields a new state and reward. The main idea of this model is that agents take corresponding actions based on the current state and obtain rewards and the value of the next state by interacting with the environment. The aim is to find strategies to maximize cumulative rewards by interacting with the environment. More formally, suppose agents execute an action
at∈
A(
st) following a policy π
θ with current state, then the agent receives rewards from the environment
Rt, and updates itself in a new state
St+1. The reward R is the feedback that quantifies the action quality of agents. The cumulative rewards at a given moment can be described as follows:
γ is a discount factor. This parameter can take any value between 0 and 1. This factor is used to ensure that the future rewards are not worth. The state-action function Qπ(s,a) following policy πθ can be derived from Ut. The expected value of state value function is Vπ(s).
5. Simulation Results and Experimental Comparison
In order to validate the DQN based path planning model, simulation with undefined crossing patterns and actual case studies with defined crossing patterns is raised. The ship domain is set to be 1.5 L, and the relative distance has been removed by ship domain. The is set to be 3 L. What is more, and are set to be 1 and 2; is variable to show comparison results. Crossing patterns are derived from historical data, so crossing patterns of simulation cannot be obtained; otherwise, crossing patterns of actual case studies can be predicted by FCPD model. Firstly, a simulation with undefined crossing patterns with changes from 0.1 to 0.9 is raised to find a satisfactory value of . Then, two actual case studies with defined crossing patterns are proposed to validate the model compared with an actual path.
5.1. Simulation with Undefined Crossing Patterns
A simulation of an encounter situation is formulated to validate the proposed model with undefined crossing patterns. A ferry encounters three target ships during the voyage. Then, the static and dynamic parameters of the target ships as well as the ferry are present in
Table 1.
As mentioned before,
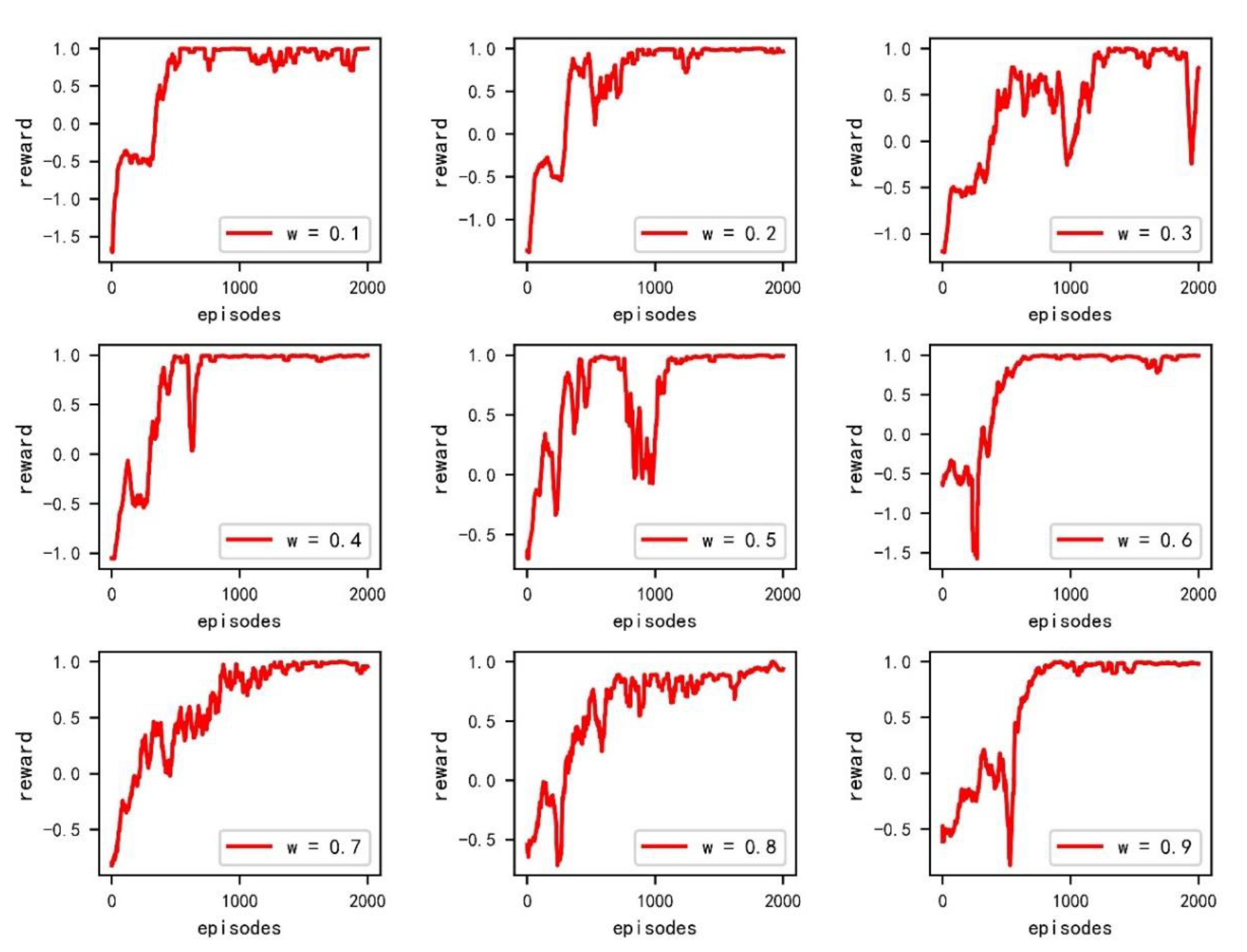
can be utilized to show the relative importance of safety and economy. In this case study, an optimal value can be obtained by offering a series of values from 0.1 to 0.9 at 0.1 intervals. The time slice is set to be 5 s. The ship domain is twice the ship length. Each environment is trained 2000 times. The reward is normalized as shown in
Figure 4.
From the convergence curves shown in the figure, all curves have a fast convergence speed and good stability, except when
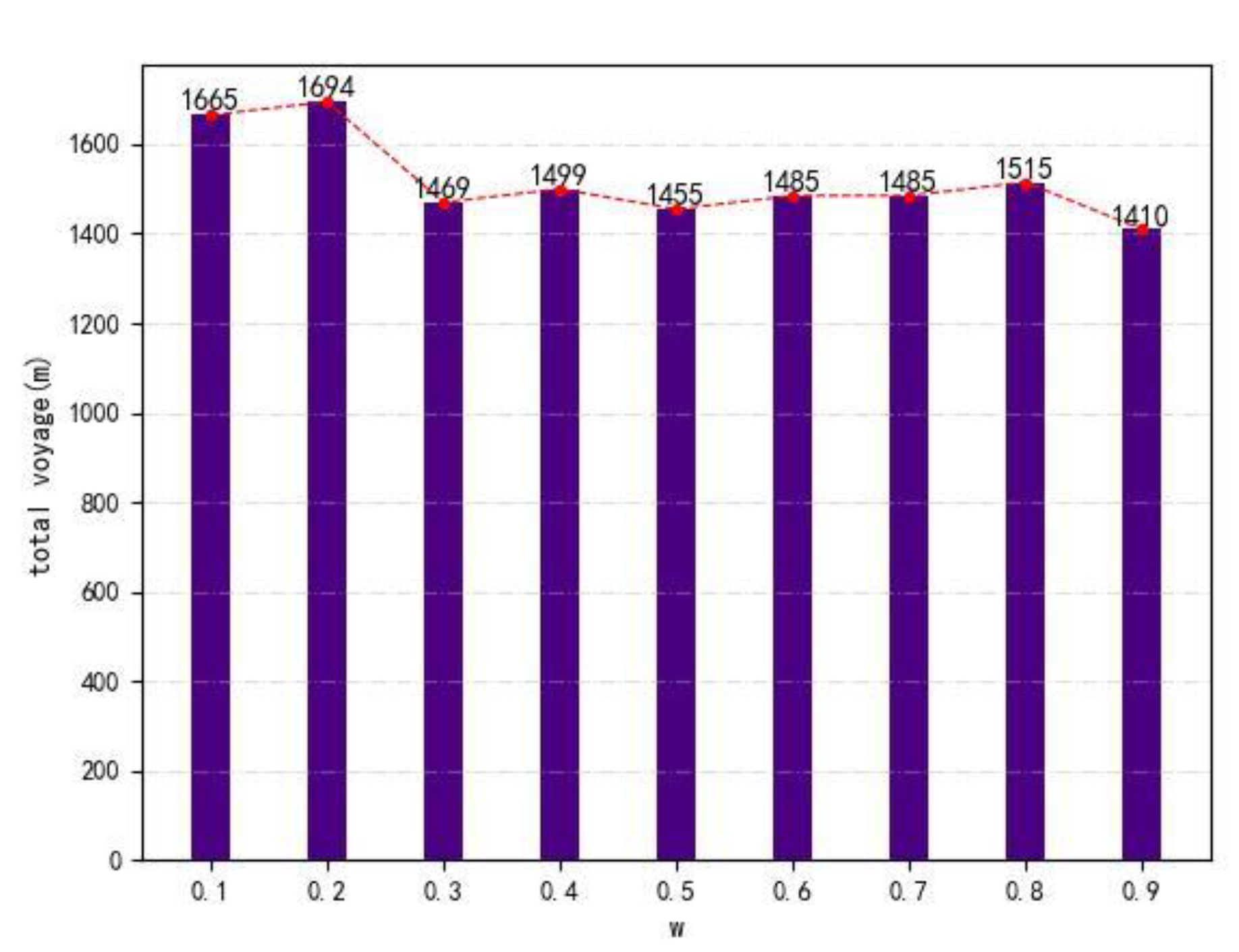
= 0.3 and is having an oscillation. The length of the total voyage is shown in
Figure 5.
Overall,
has a negative correlation with total voyage. The total voyage will be longer with w increases, as shown in
Figure 5. However, there is a small impact on total voyage when
ranges from 0.3 to 0.9. The reason is that
exists within encounter situations. When encounter situations are clear,
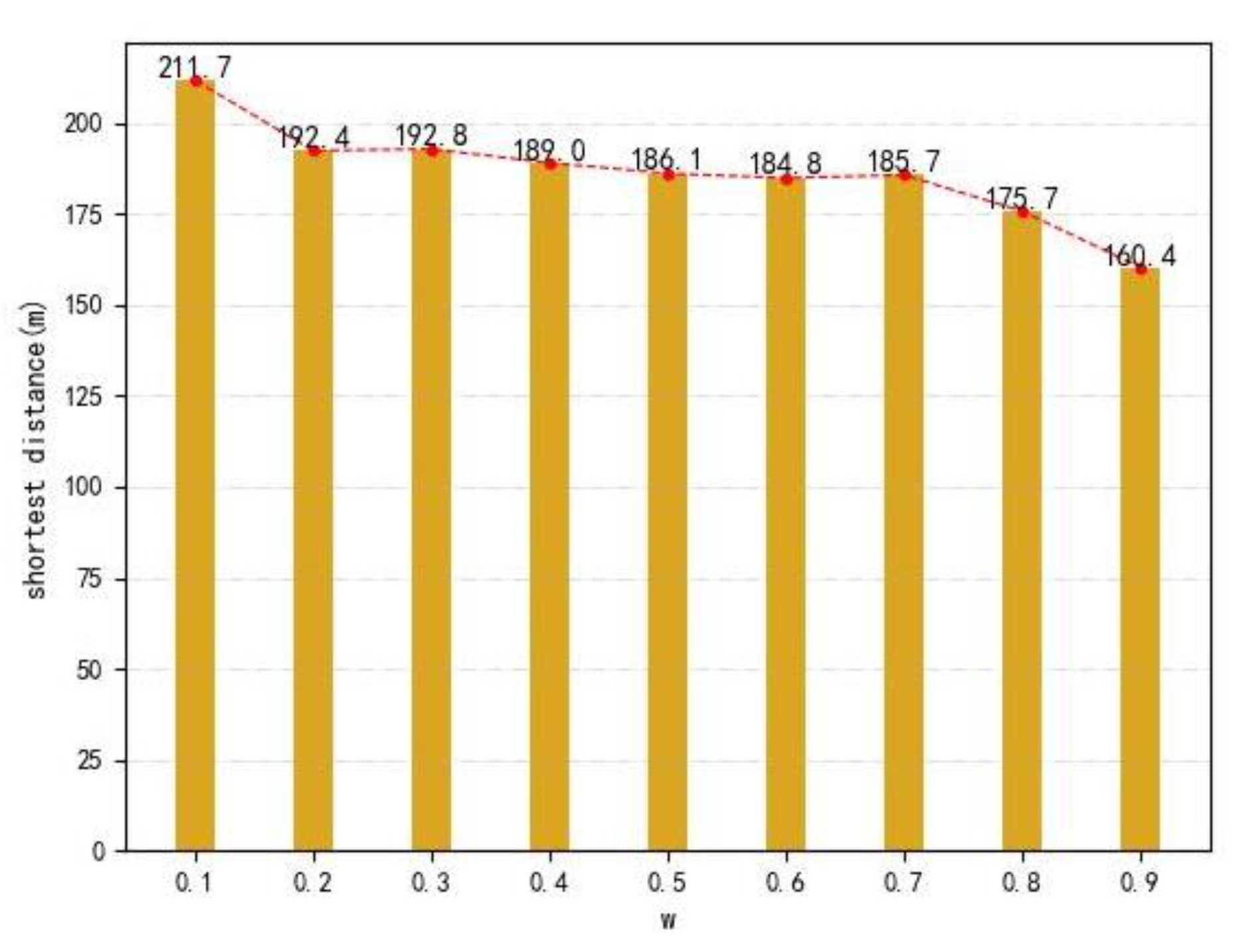
is useless. Then, closest relative distances are calculated to show the difference in
Figure 6.
It can be seen that the closest relative distances between the ferry and the target ships decrease with the increase in
, but all the closest relative distances are larger than the ship domain (158 m). Therefore, it can be inferred that the navigation safety is decreasing with the increase in
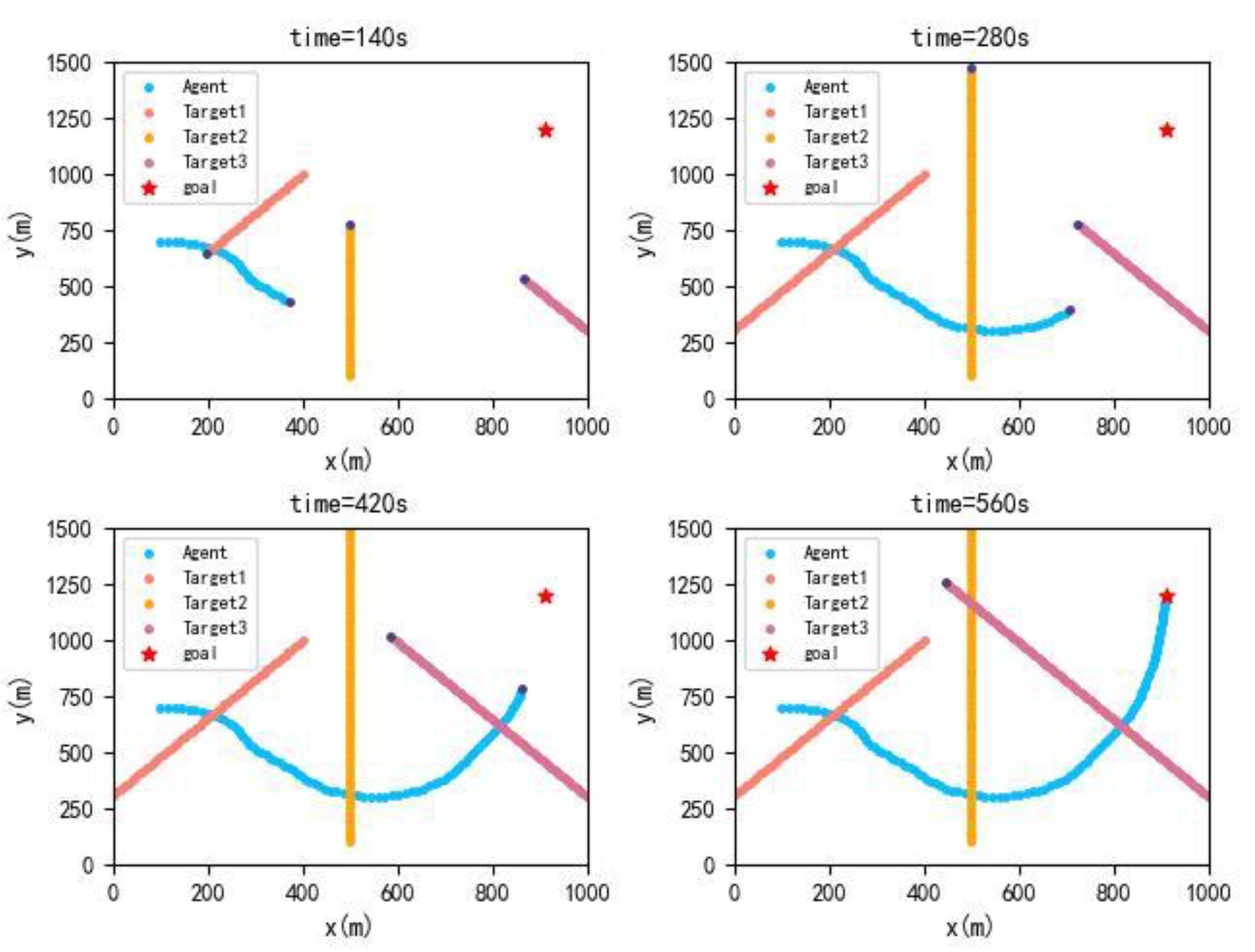
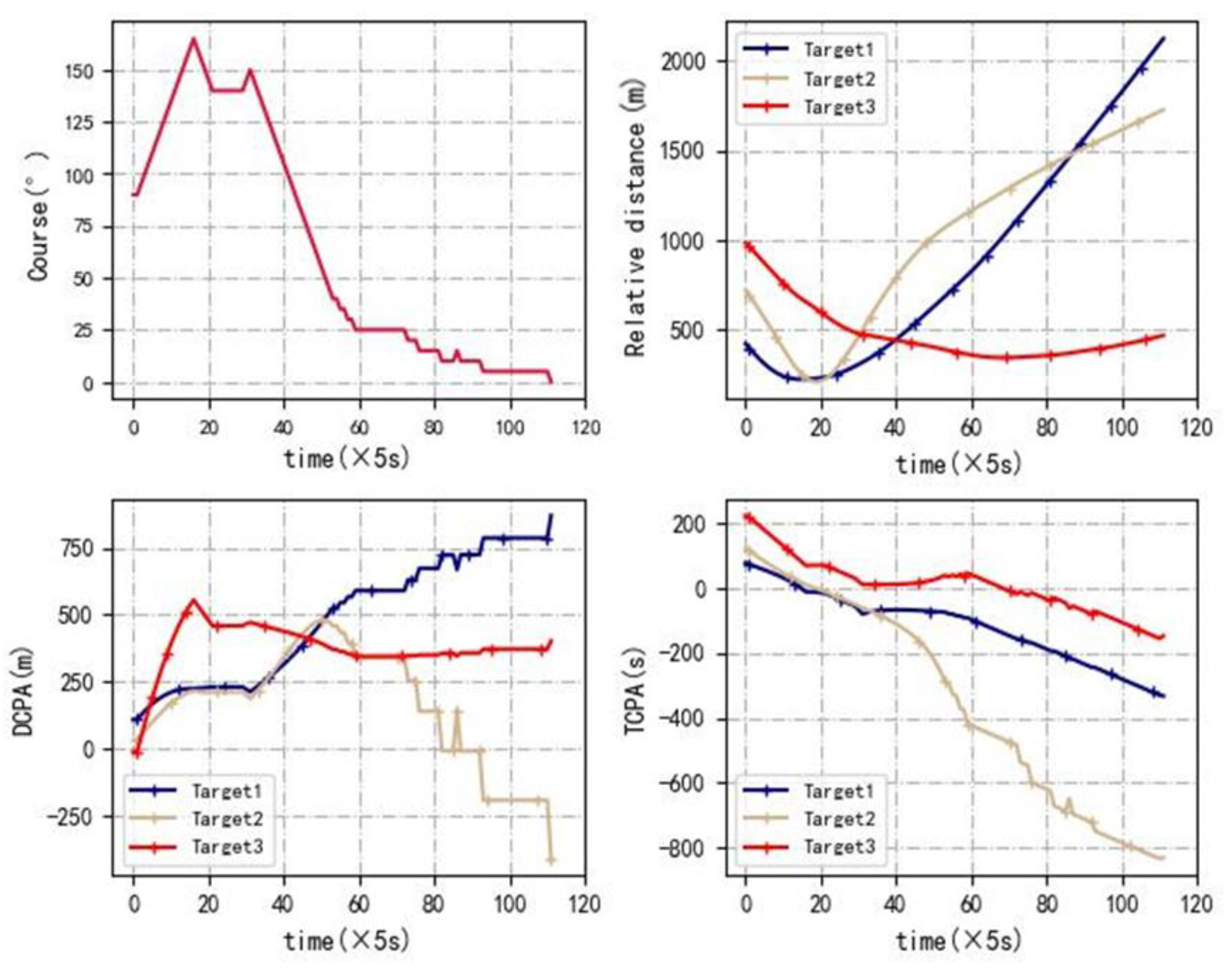
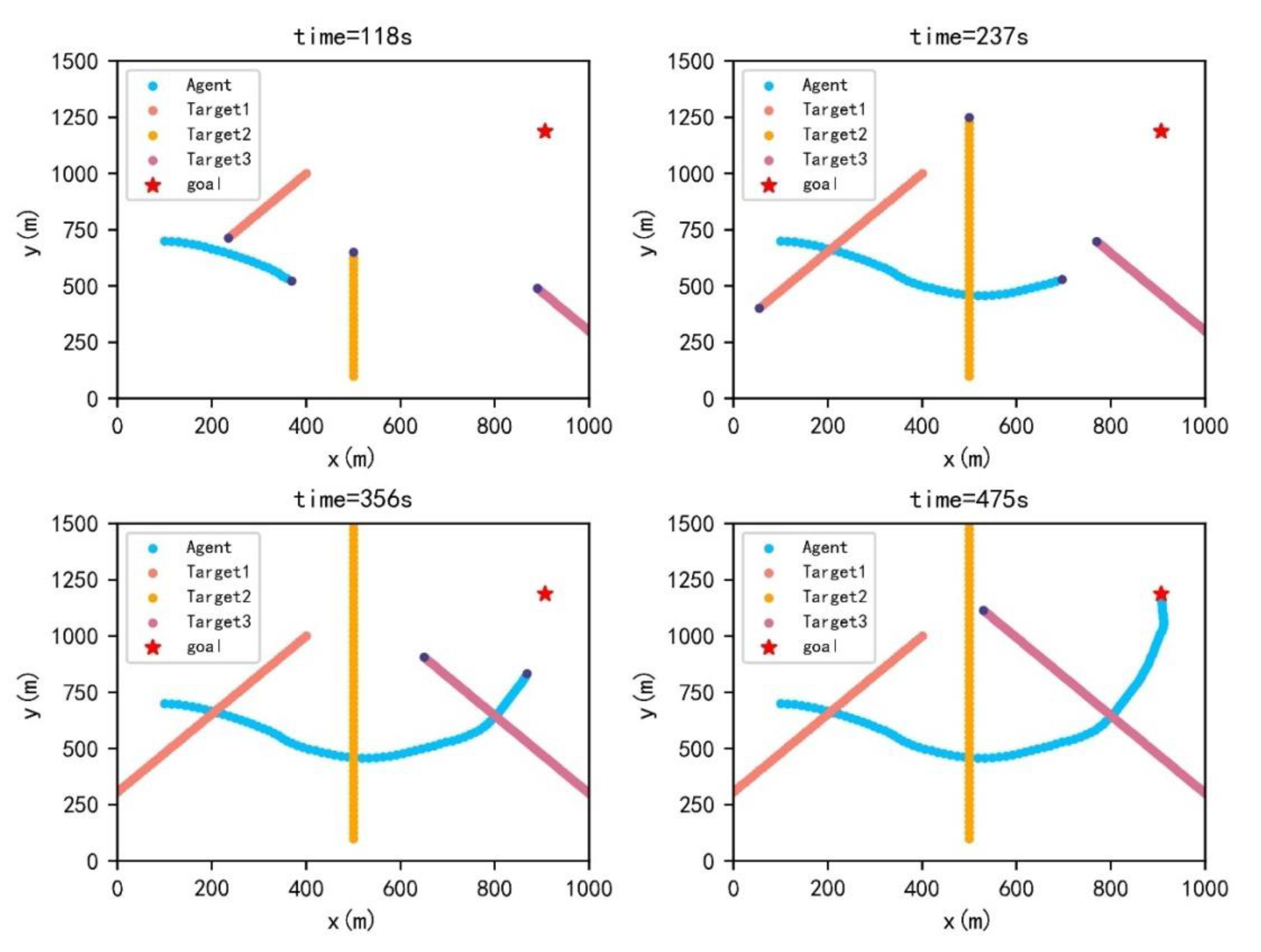
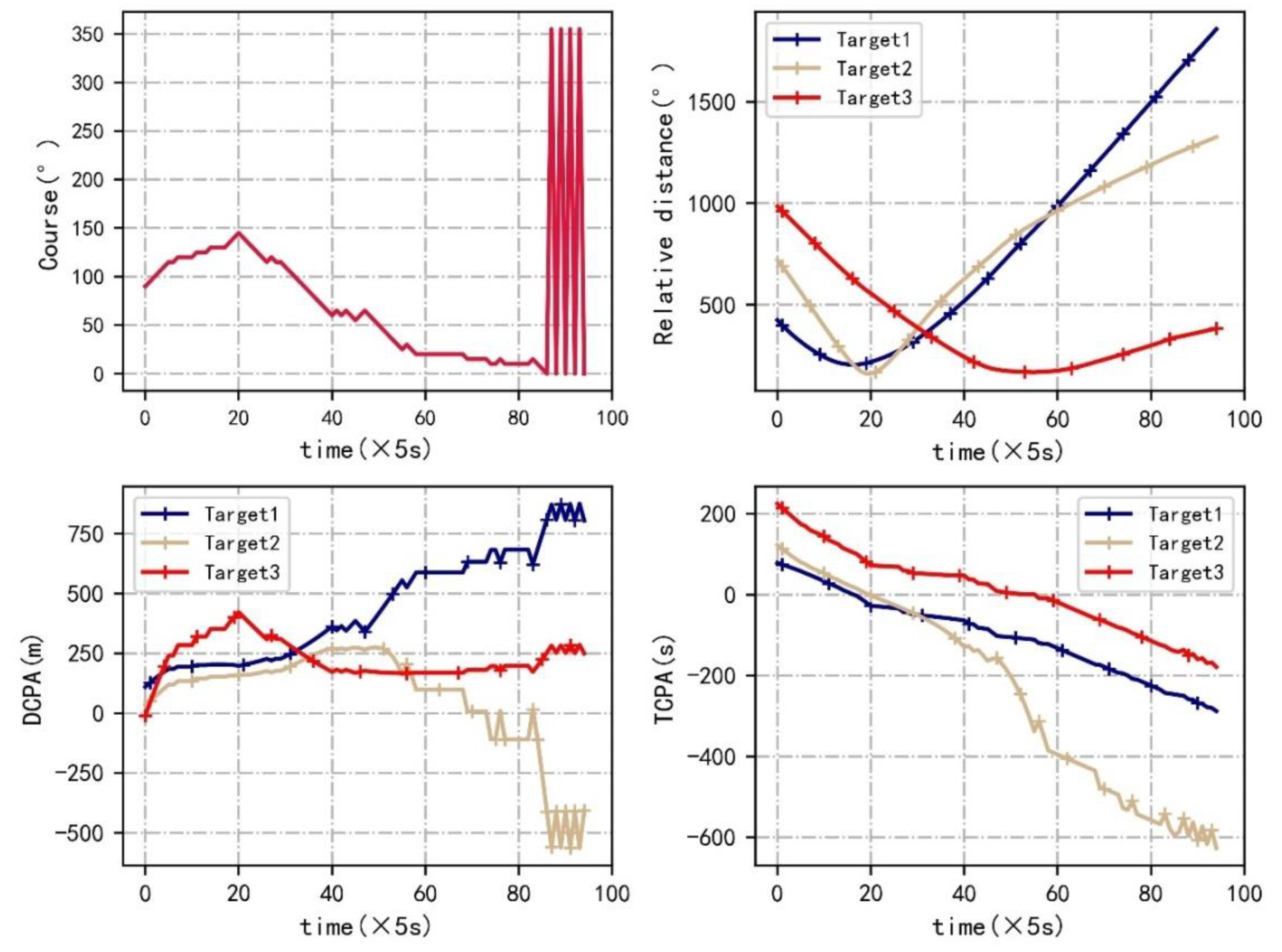
. The ship domains are not violated. Then, the trajectories, their DCPA, TCPA and relative distance are visualized when w is set to be 0.1 and 0.9 in
Figure 7,
Figure 8,
Figure 9 and
Figure 10.
The course of a ferry is changeable. The reason for ferry course oscillation is that the clockwise course is positive. Therefore, a relative course of 0° and 350° is 10°. Compared with = 0.1, the trajectories, DCPA, TCPA and relative distance when = 0.9 have some differences. The maximum course change reaches 75° in the first 100 s, while the maximum course change is 55° when = 0.1. For crossing actions, a ferry prefers to avoid collision with target ships at early times when = 0.1. However, a ferry tends to reach the endpoint when = 0.9. The relative distance is larger when = 0.1. As shown in DCPA and TCPA, there is no collision risk for both. Moreover, the navigation time is 475 s when = 0.9, while the navigation time is 560 s when = 0.1.
5.2. Case Studies with Defined Crossing Patterns
Two encounter situations are raised to validate the DQN based path planning when
is set to be 0.7. The comparison results are conducted between the actual and optimized agent path. Animations can be found in
Appendix A.
5.2.1. Case Study 1
A historical ferry voyage is selected in which three ships encountered a ferry in the Jiangsu Section of the Yangtze River. The latitude and longitude of the destination are (31.9499° N, 118.6090° E), and the start point is (31.94659° N, 118.60532° E). Then, the dynamic parameters of the target ships as well as the ferry are present in
Table 2.
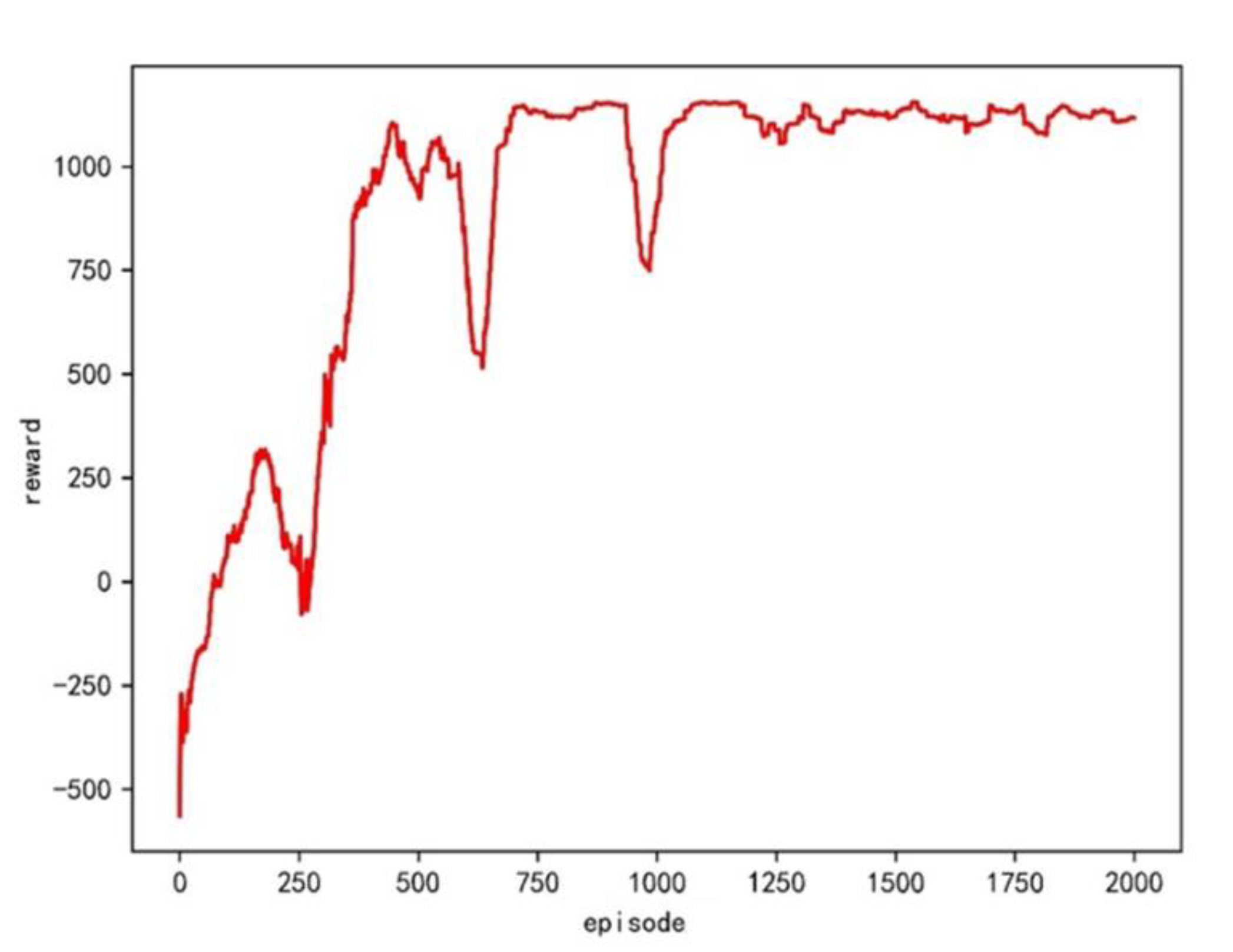
A different weight can be selected to show the difference. The
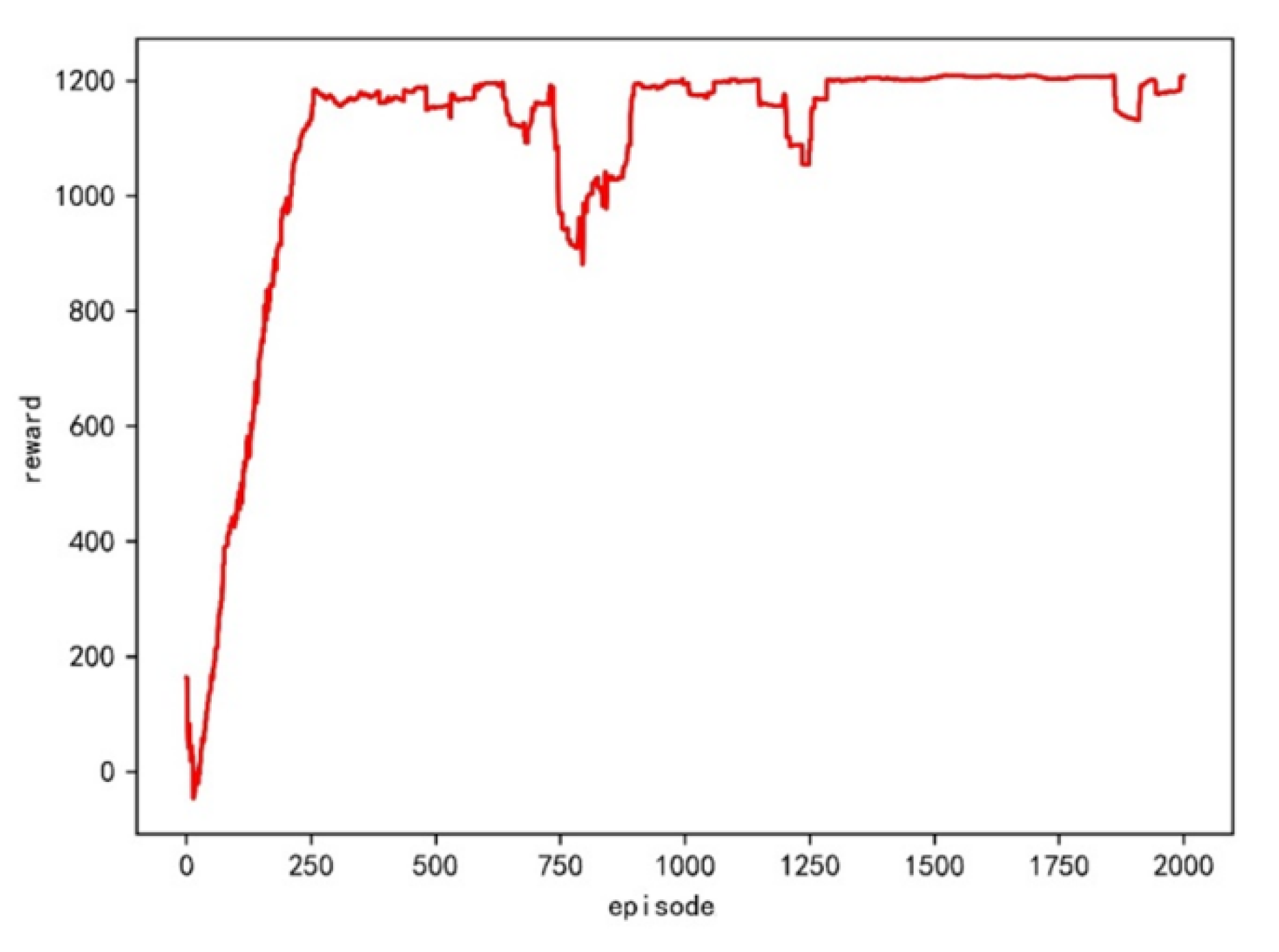
is set to be 0.7. The training results are shown in
Figure 11.
The training starts to converge around 250 times, some fluctuations appear from 750 to 1000 times, and then training is stable. The actual and predicted crossing patterns are listed in
Table 3.
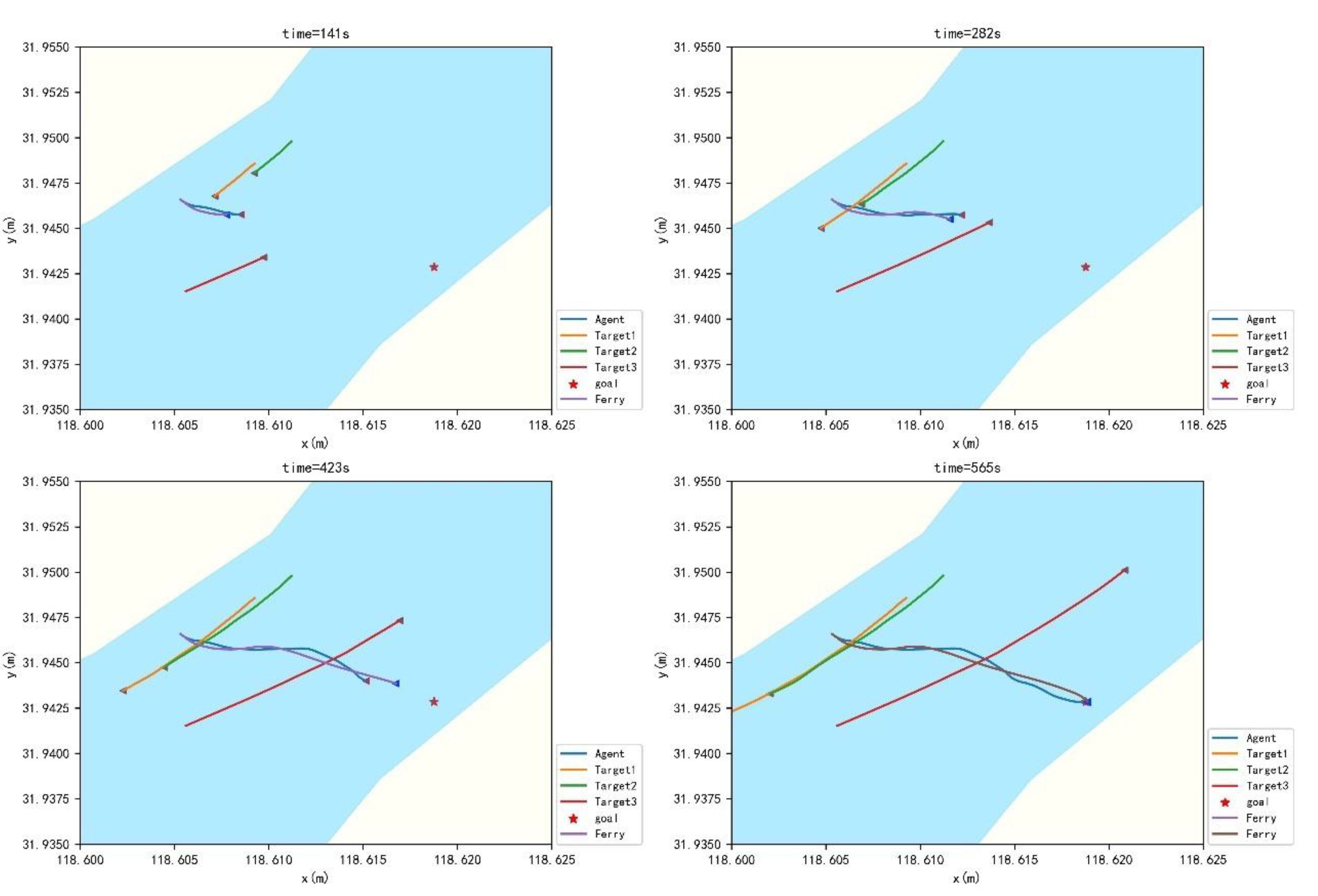
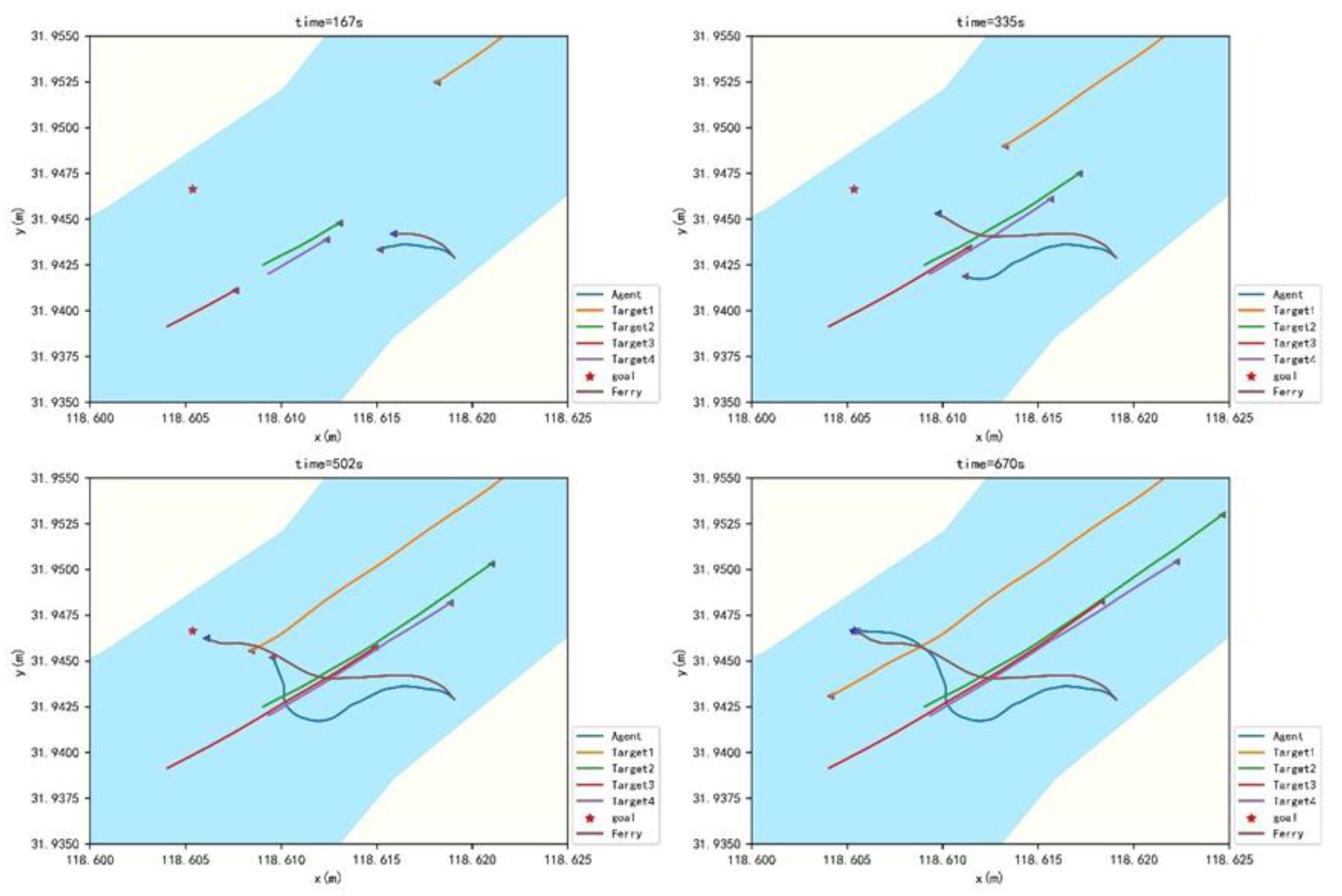
As described in the table, the actual and predicted crossing patterns are the same. A ferry and a trained agent travel from the bow of TS1 and TS2 and stern of TS3. The actual and trained trajectories are shown in
Figure 12.
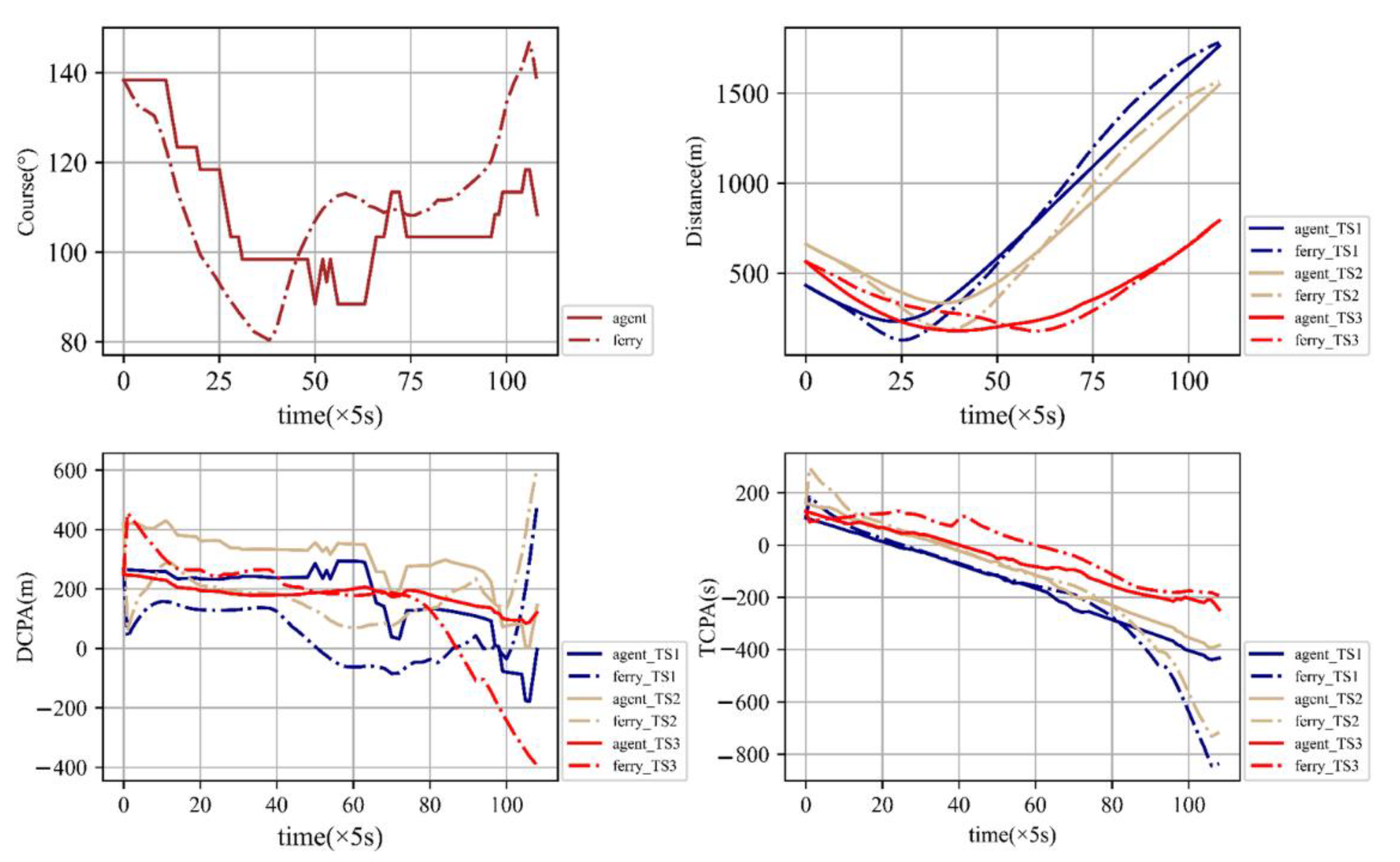
The introduction of the XgBoost algorithm to predict the crossing patterns, combined with the adjusted reward function for path planning, is feasible. The trained trajectories match the real trajectories satisfactorily. Then, DCPA, TCPA and relative distance are shown in
Figure 13.
As shown in
Figure 13, the course of the trained agent has more fluctuations than the ferry’s real trajectory. The relative distance between agent and target ships is longer than the relative distance between ferry and target ships, which means trained trajectories are safer than actual ones. For DCPA and TCPA, agent and ferry almost share the same expected TS3. It can be inferred that the trained trajectories can avoid collisions with target ships and perform better in safety.
5.2.2. Case Study 2
A historical ferry voyage is selected in which four ships are encountered with a ferry in the Jiangsu Section of the Yangtze River. The latitude and longitude of the destination are (31.9499° N, 118.6090° E), and the start point is (31.9429° N, 118.619067° E). Then, the dynamic parameters of the target ships as well as the ferry are present in
Table 4.
The
is set to be 0.7. The training results are shown in
Figure 14.
The training starts to converge around 1000 times, and then training is stable. The actual and predicted crossing patterns are listed in
Table 5.
As described in the table, the actual and predicted crossing patterns are different. A ferry travels from the bow of TS1 and TS3 and from the stern of TS2 and TS4. The trained agent travels from the bow of TS1, TS2, TS3 and TS4. The actual and trained trajectories are shown in
Figure 15.
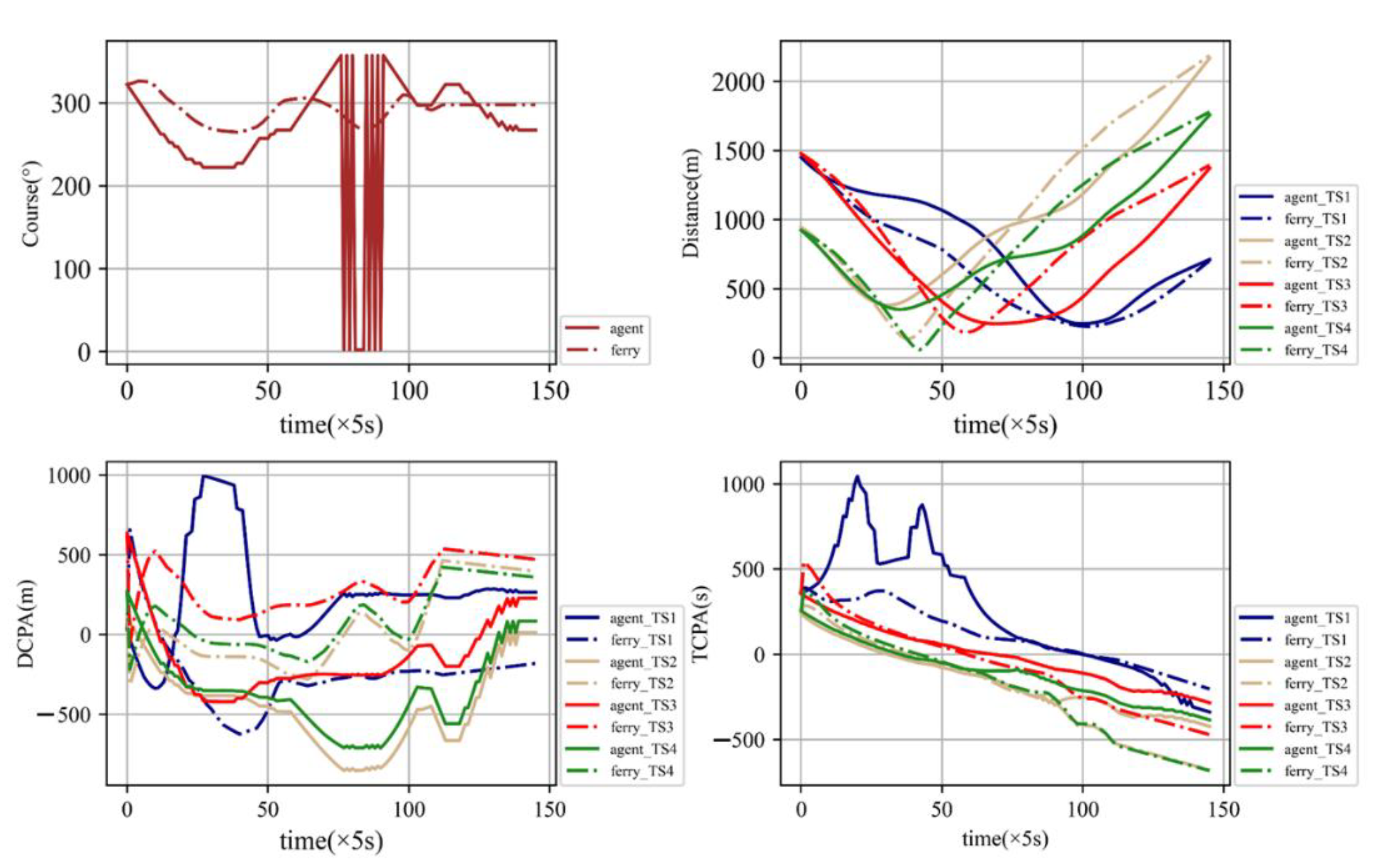
As shown in
Figure 15, the agent spends more of the voyage in avoiding collision with target ships. The crossing patterns of the agent are safer than a ferry. However, the economy of a ferry is better than an agent. The DCPA, TCPA and relative distance are calculated as shown in
Figure 16.
As shown in the figures, the ferry avoids TS2 and TS4 from 100 s to 250 s, while the agent avoids TS2, TS3 and TS4 from 100 s to 400 s. Since the agent avoids more ships, the collision avoidance operation time is longer than for the ferry. The minimum relative distance between the agent and TS2 is 404 m and between the agent and TS4 it is 401 m, respectively. The minimum relative distance between a ferry and TS2 is 116 m and between a ferry and TS4 is 71 m, respectively. For ferries, the TCPA of TS2 and TS4 is close to 0 at 200 s. At this moment, the DCPA of TS2 and TS4 is −139 m and −62 m. For an agent, the DCPA of TS2 and TS4 is −350 m and −339 m. For TS2 and TS4, the trajectory of the agent is safer than the trajectory of the ferry. For TS3, the minimum relative distance of the ferry is 247 m, and the minimum relative distance of the agent is 258 m. The trajectory of the agent is safer than the trajectory of the ferry. As for TS1, the crossing pattern is 0 for the agent, but the crossing pattern is 1 for the ferry. Although the minimum relative distance between the agent and TS1 is shorter than between the ferry and TS1, the crossing pattern of the agent is safer than the ferry. Thus, the overall trajectory of the agent is safer than the ferry, but the economy of the ferry performs better than the agent.
6. Conclusions
This study proposes an intelligent path planning algorithm for ferries crossing the busy waterways. Rules for inland waterways indicate that when a ferry encounters a target ship, it should take actions to avoid the target ship and try to pass through the stern of the target ship. In order to incorporate these rules into the model, this study uses historical data for crossing behavior prediction and inputs them into the state space. Moreover, different thresholds are selected for the reward function to balance the economy and safety. Then, the model is utilized in case studies. The results of Case 1 show that the autonomous navigation trajectory based on the model is, in general, similar with the actual trajectory, indicating that the model can be applied to the autonomous navigation of the ferries. The results of Case 2 show that the trajectory of the ferry based on the model is better than the actual trajectory in terms of safety. This study tries to achieve a satisfactory path while considering safety and economy. If navigators prefer to economize, then the path will be more risky; otherwise, a longer path will be generated. The autonomous path planning system is constructed by training for safety rewards and economy rewards. Safety and economy cannot be achieved simultaneously. Case studies show that the generated paths are safer than the historical path, but are longer than the historical path. In practice, the safety and economy of a path planning system are determined by navigator preference. In future research, this study will be further optimized in speed for better application in practice.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}