Analysis of Flow Field Characteristics of Aquaculture Cabin of Aquaculture Ship


Abstract
:1. Introduction
2. Model and Principle
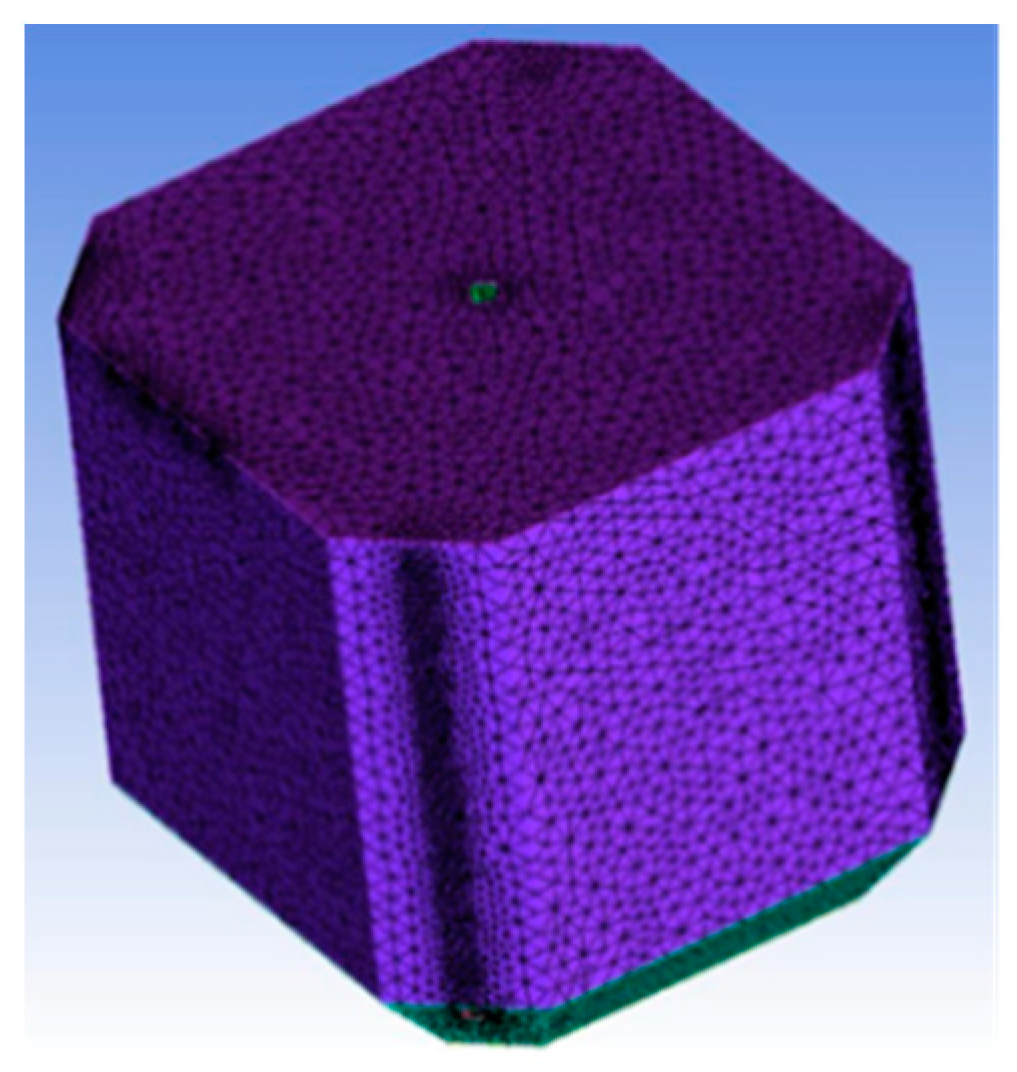
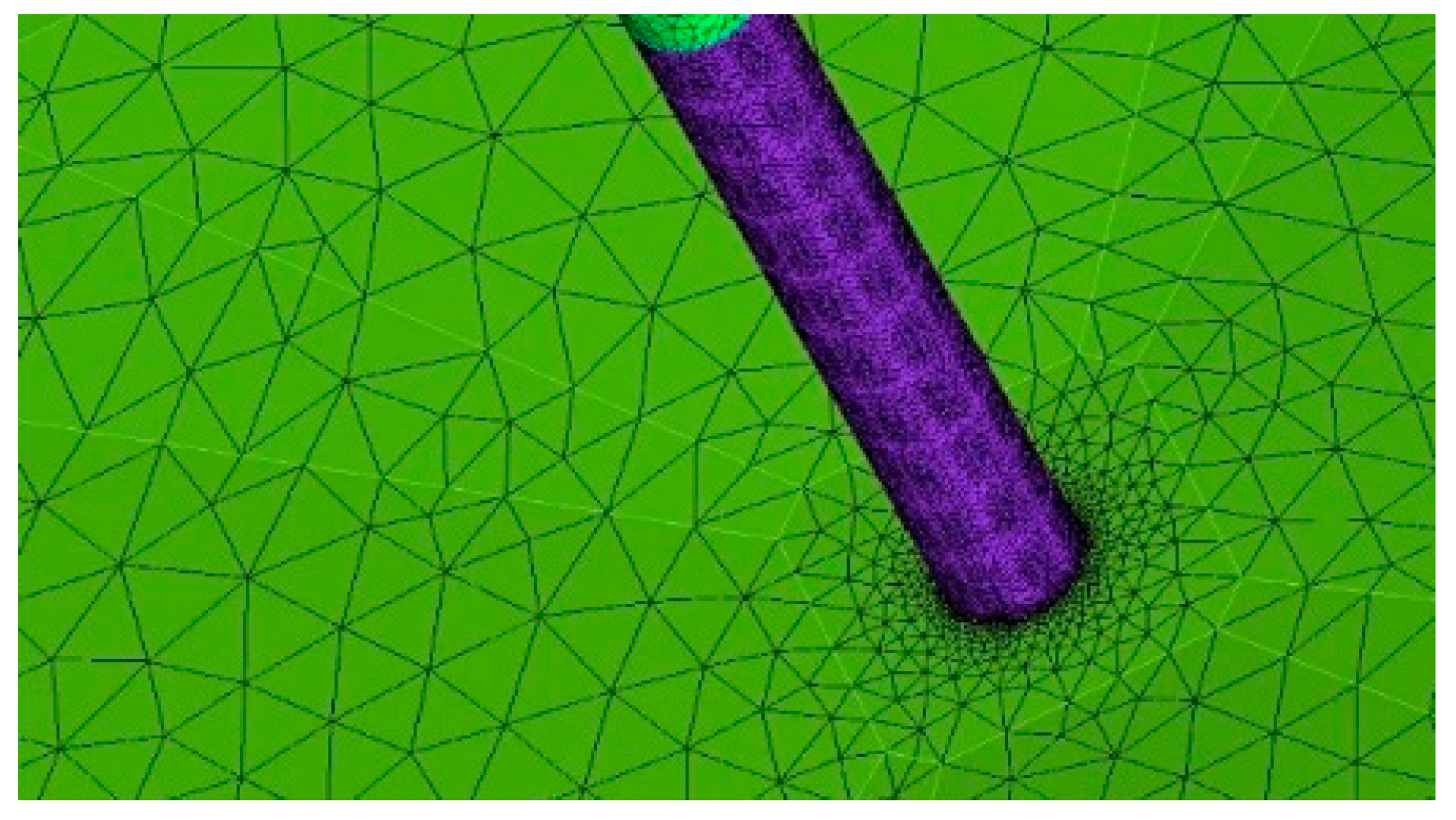
2.1. Geometric Model and Meshing
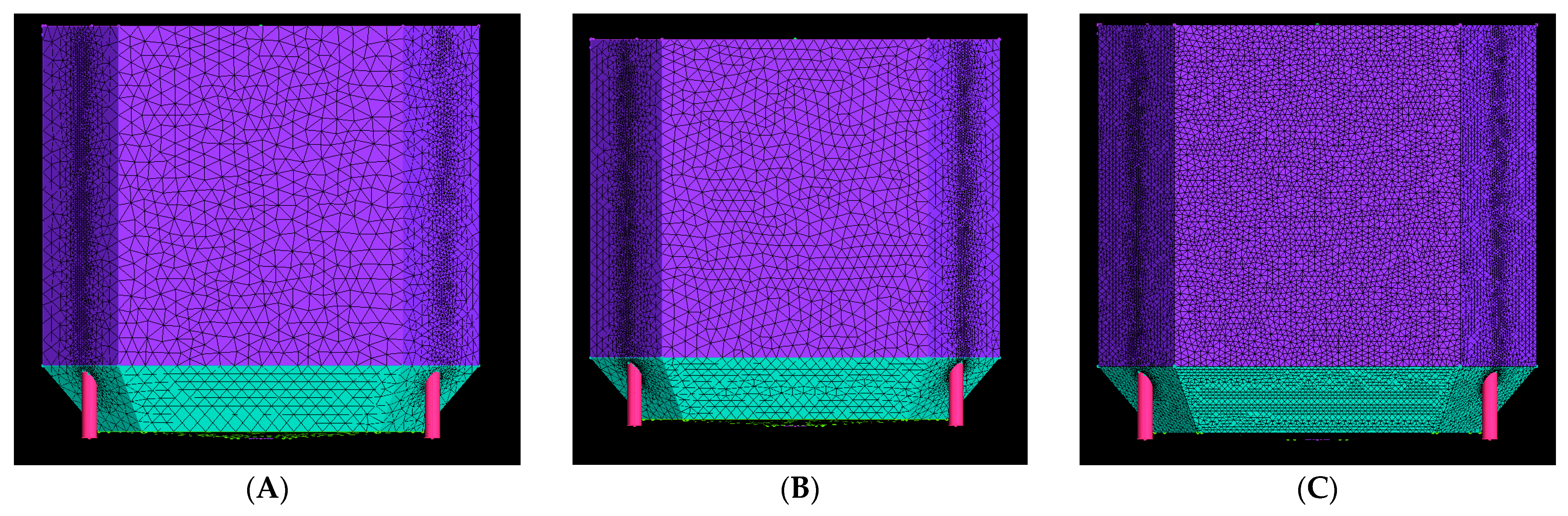
2.2. Grid Independence Verification
2.3. Turbulence Model
2.4. Multiphase Flow Model
2.5. Calculation Parameter Selection
3. Results and Discussion
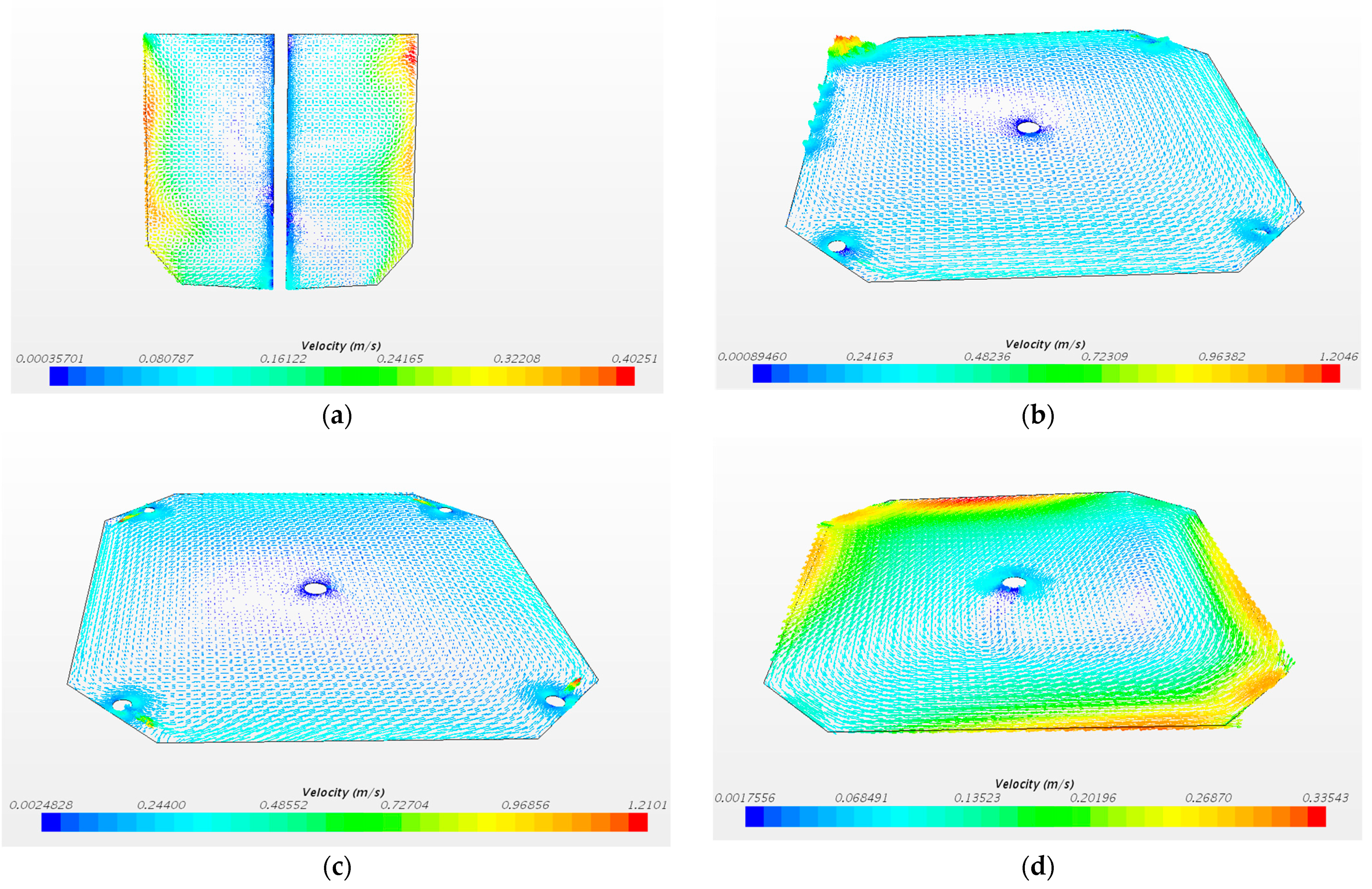
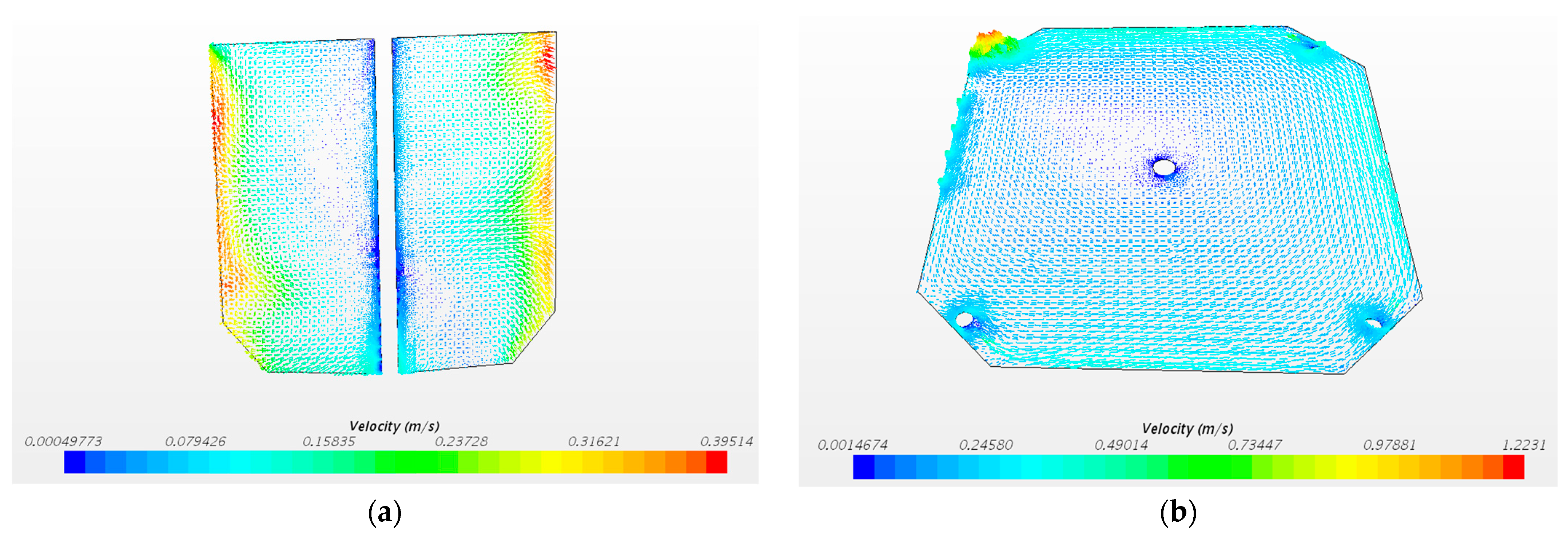
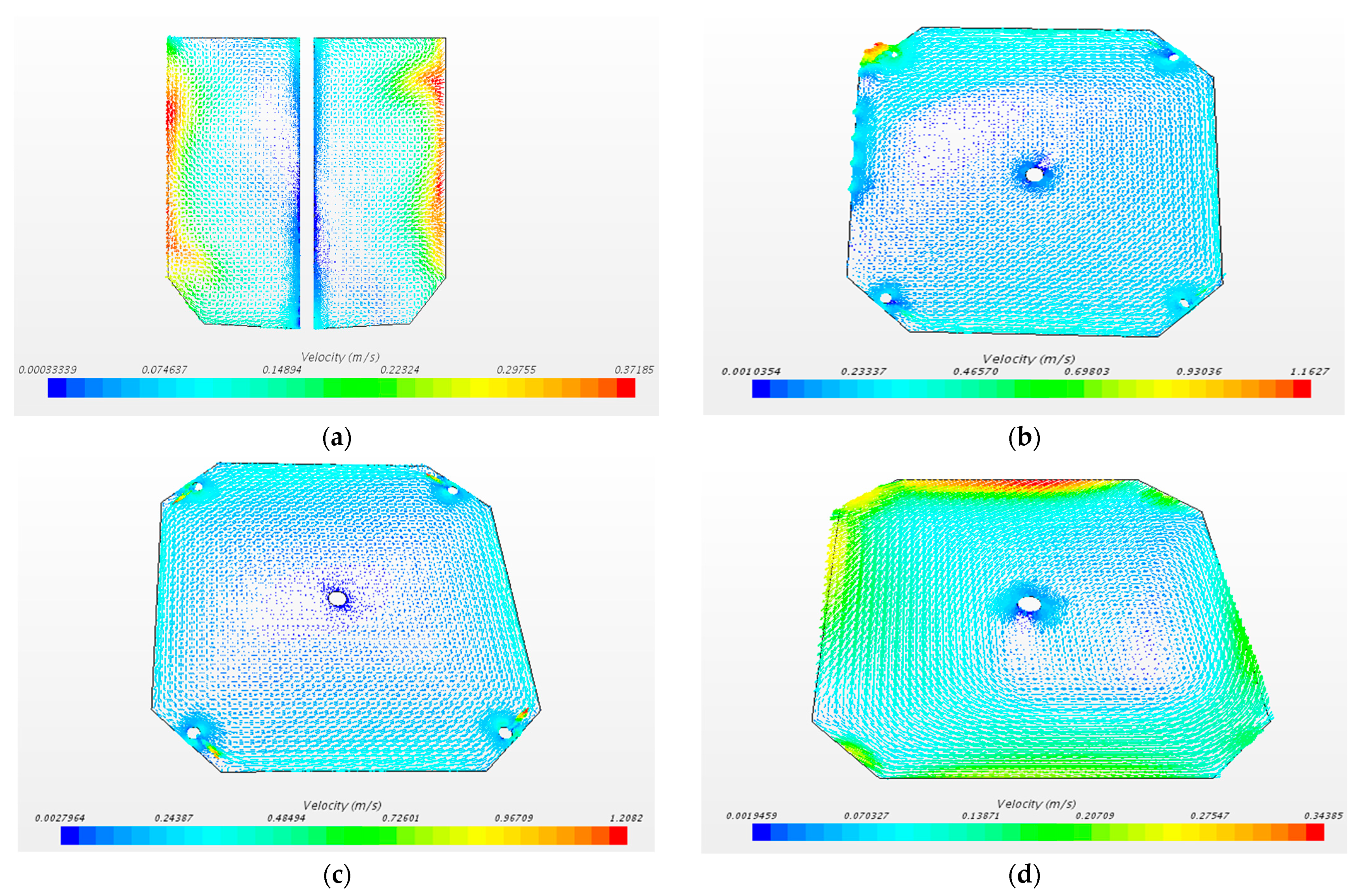
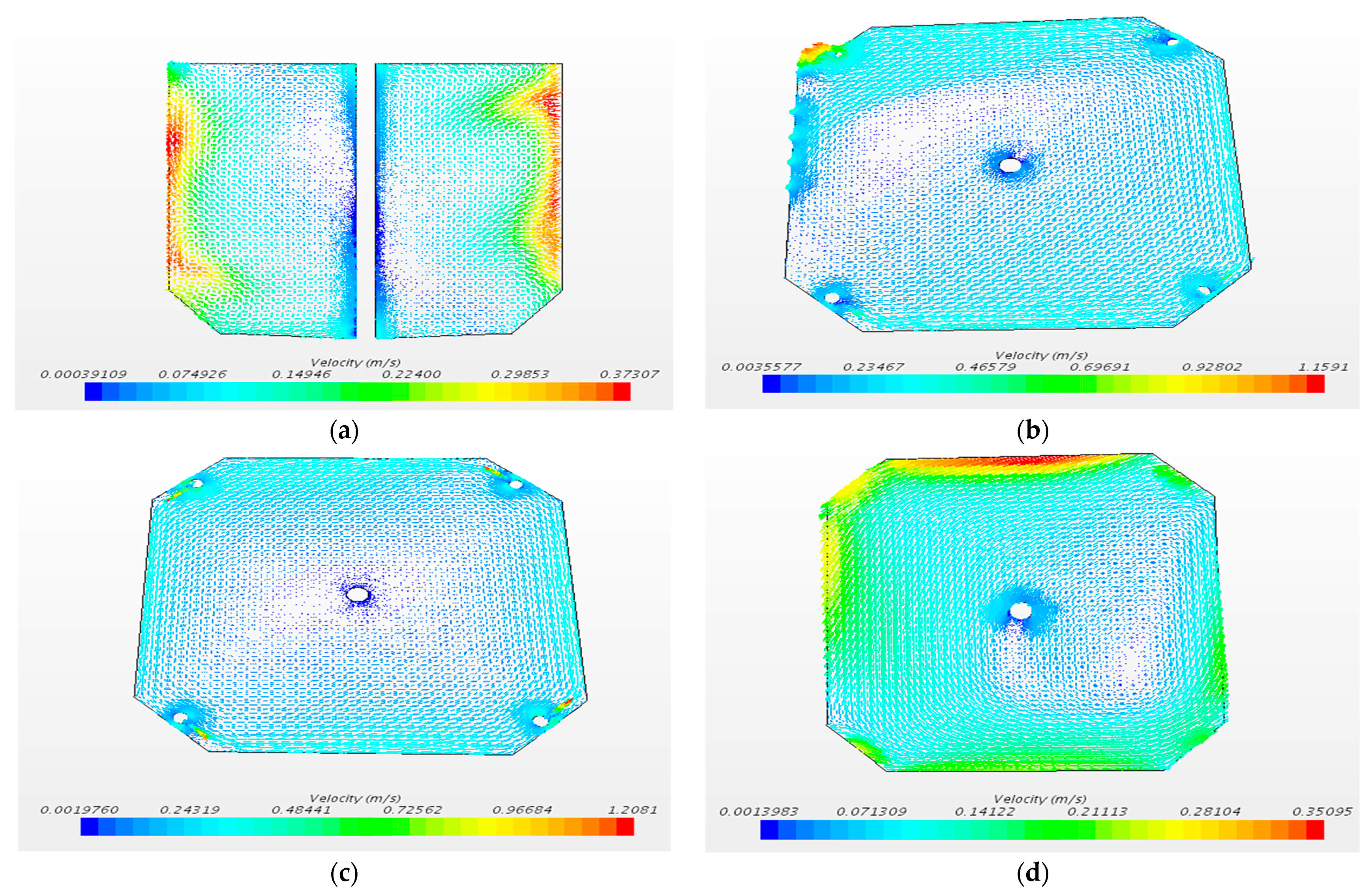
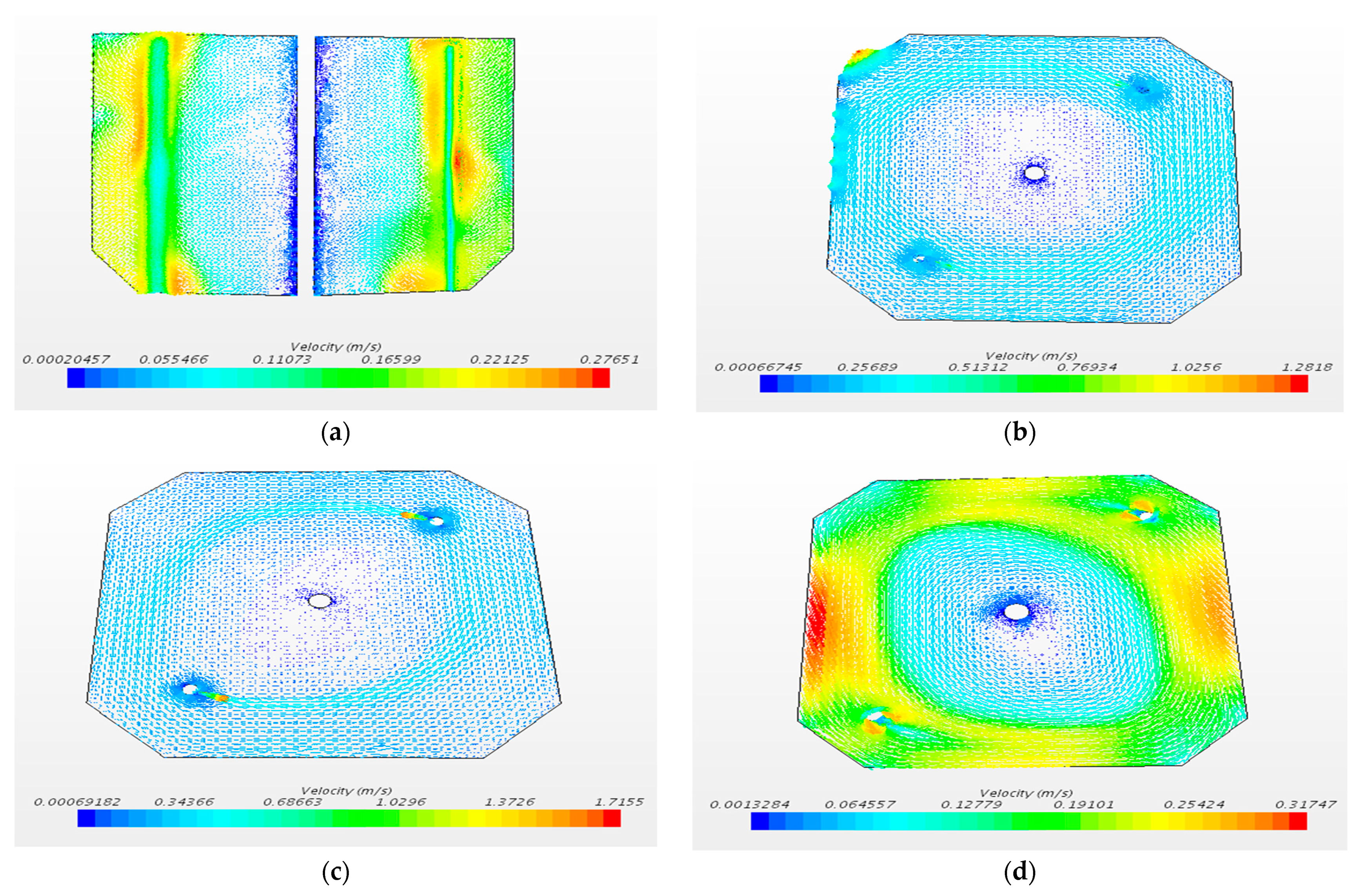
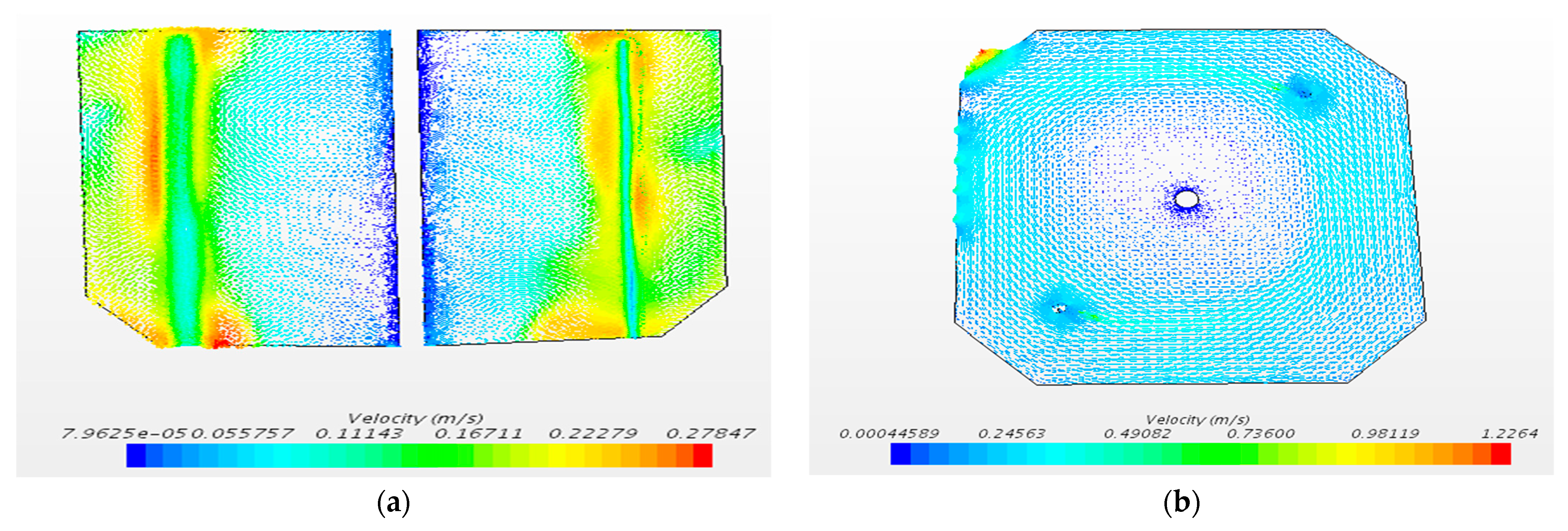
3.1. Working Condition of Four Inlet Pipes
- (1)
- Bottom outflow ratio of 40%
- (2)
- Bottom outflow ratio of 30%
- (3)
- Bottom outflow ratio of 20%
- (4)
- Bottom outflow ratio of 10%
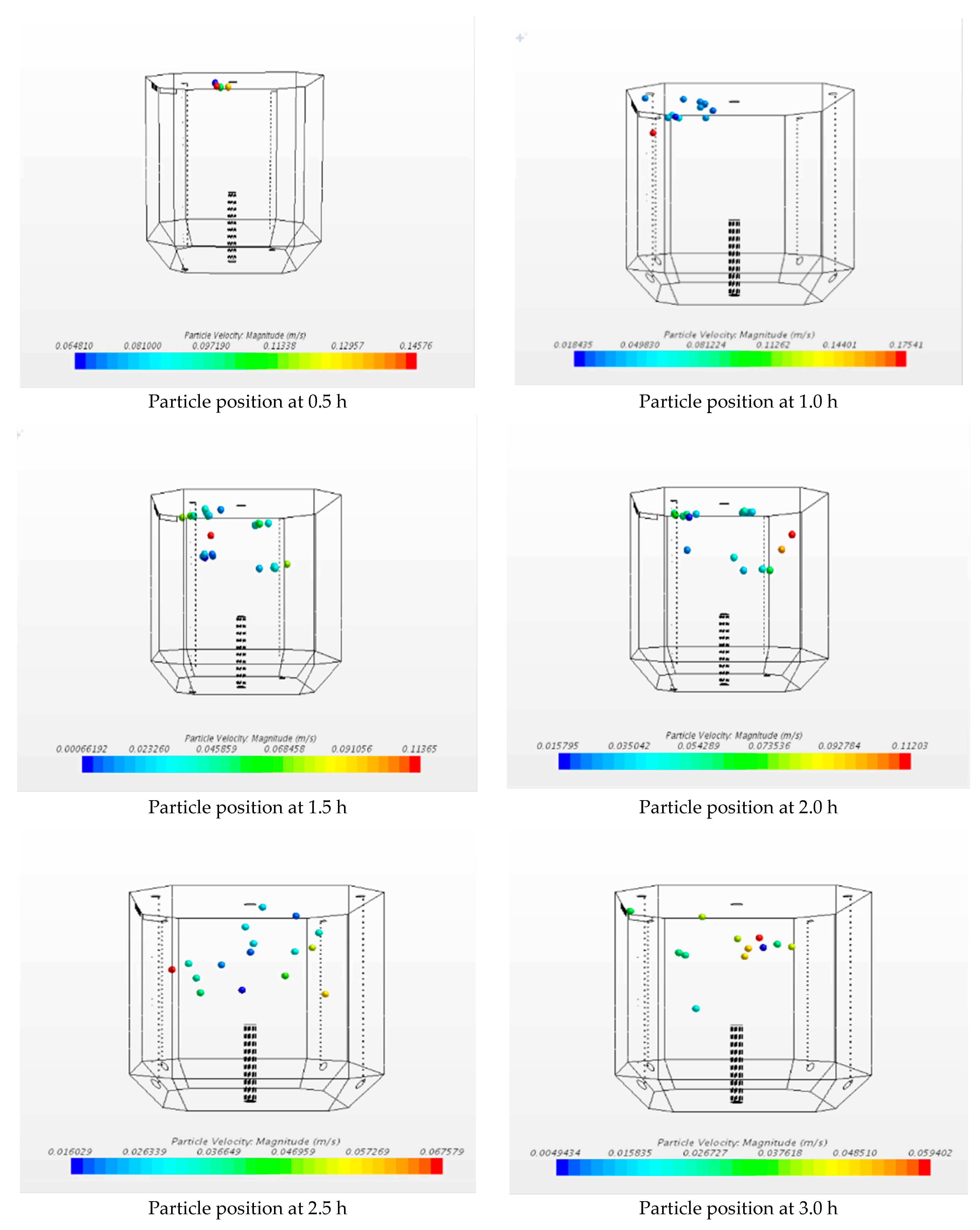
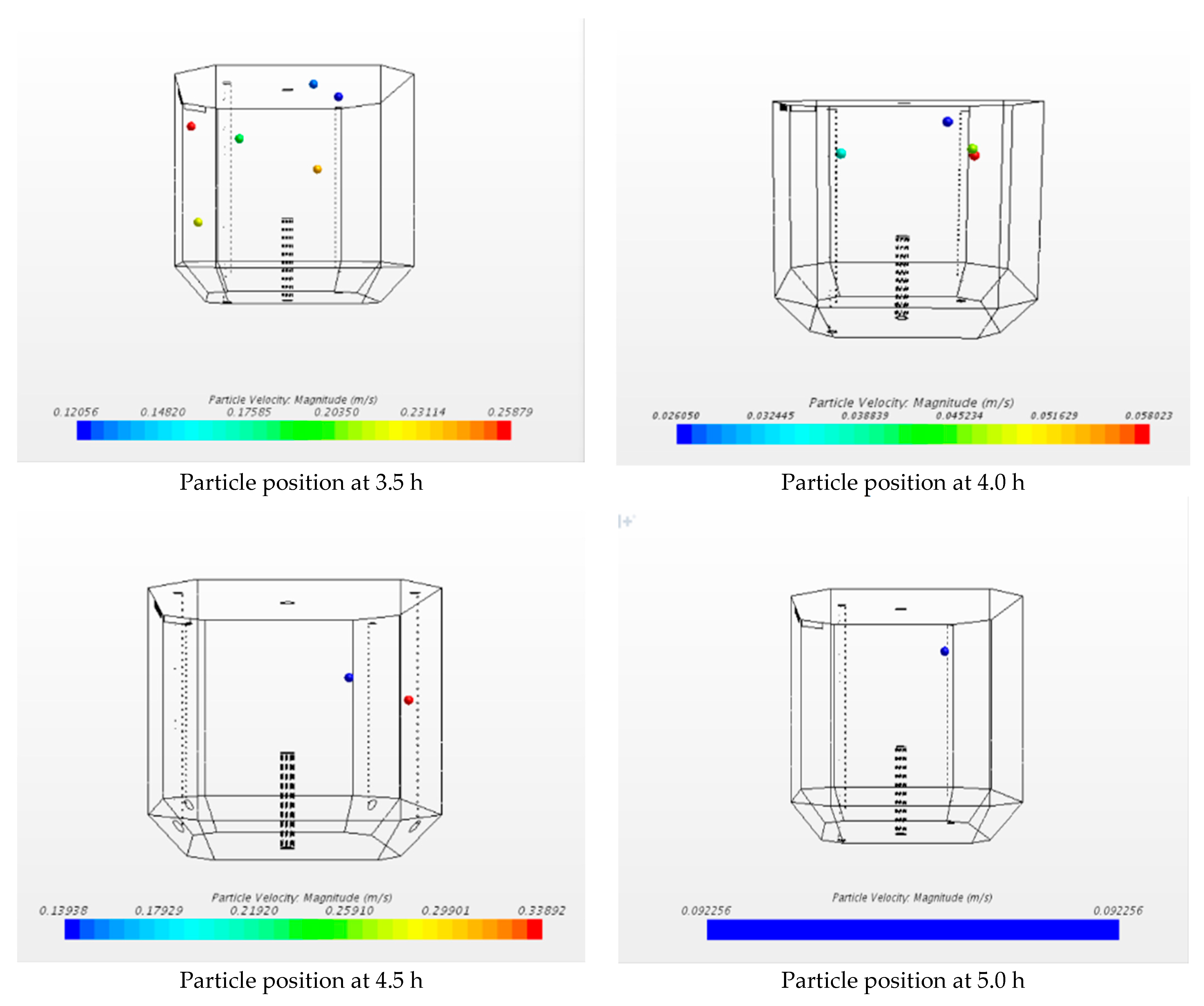
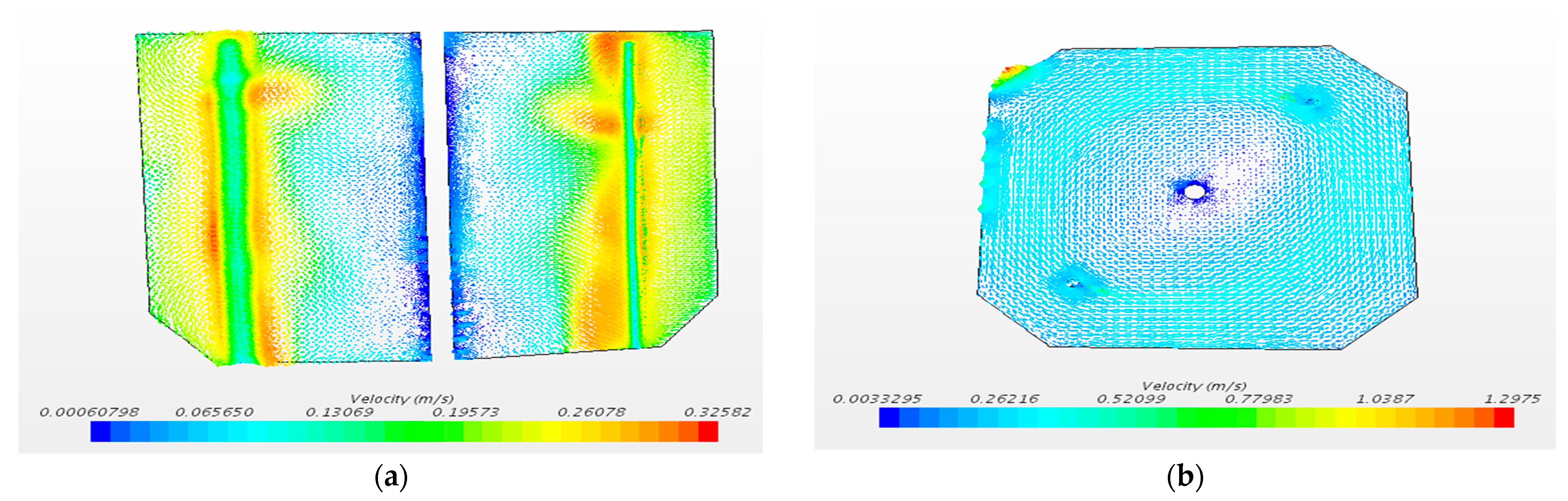
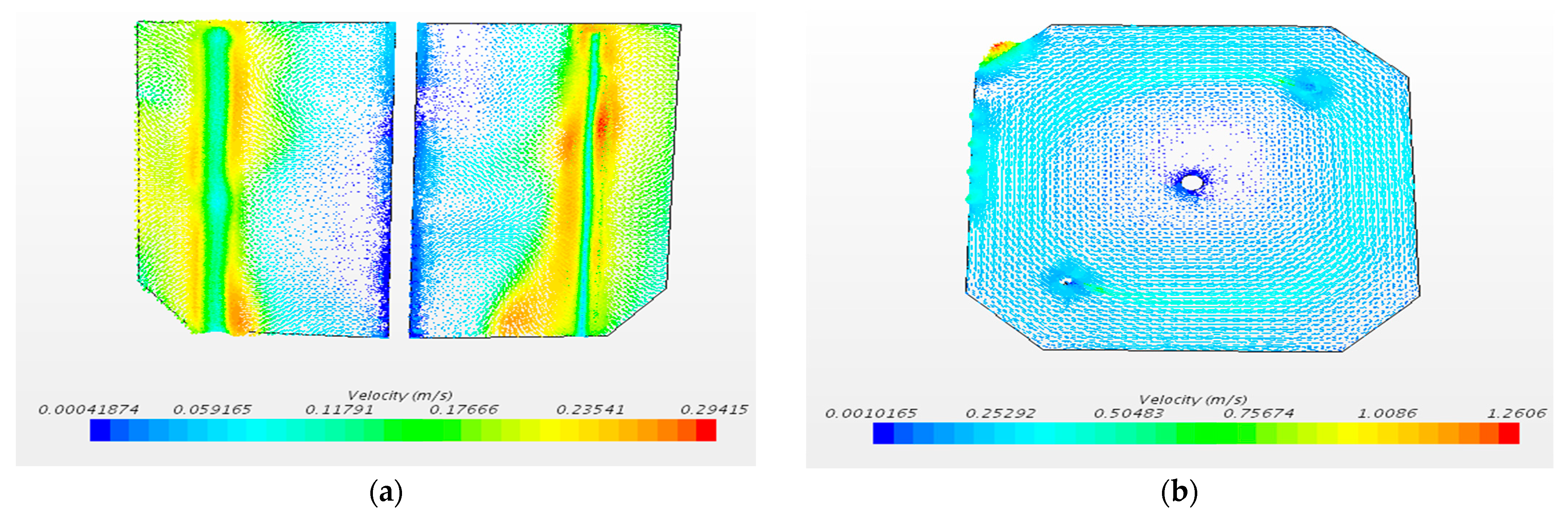
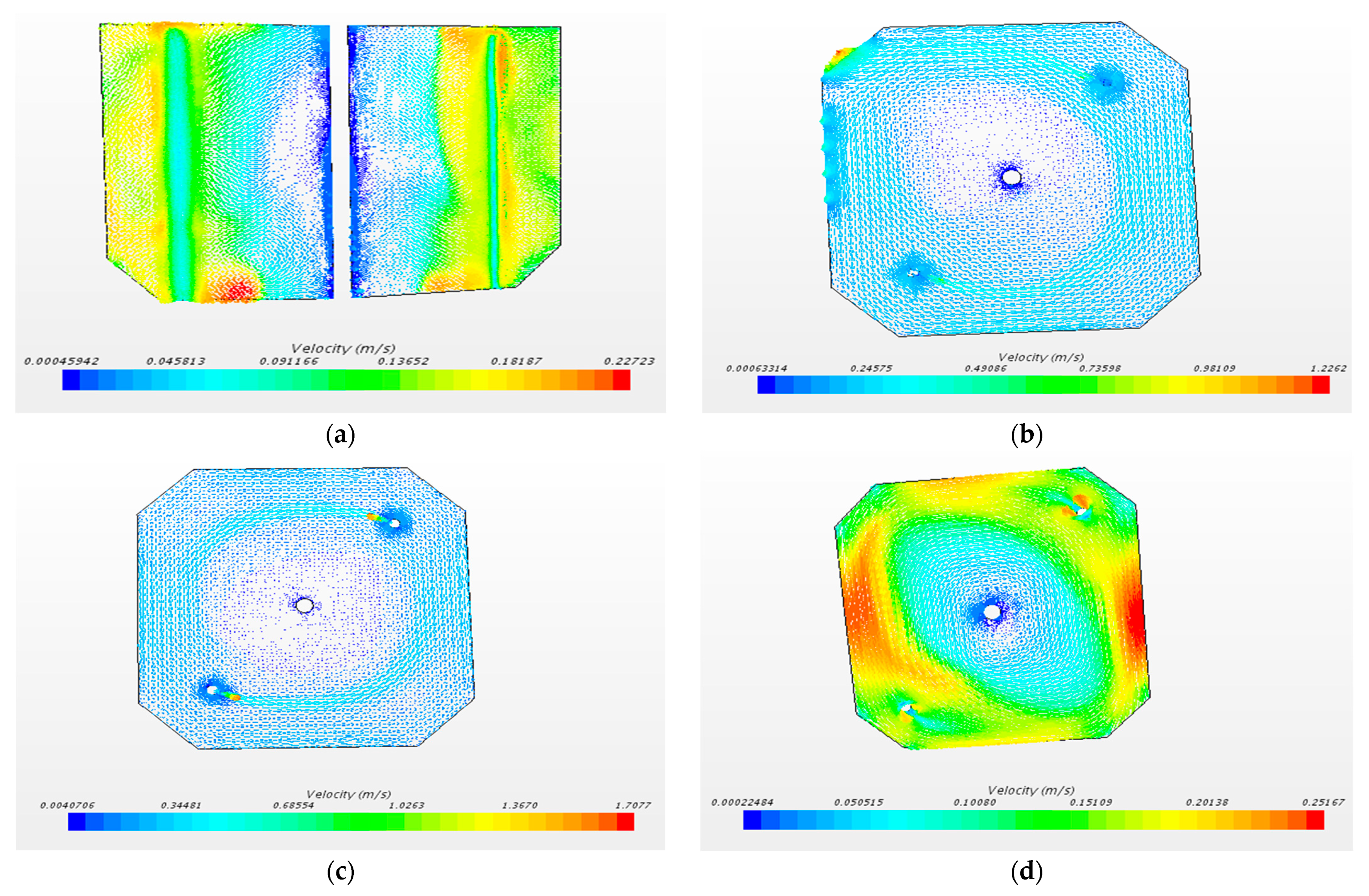
3.2. Two Inlet Pipe Conditions, Top Spray Particles
- (1)
- Bottom outflow ratio of 40%
- (2)
- Bottom outflow ratio of 30%
- (3)
- Bottom outflow ratio of 20%
- (4)
- Bottom outflow ratio of 10%
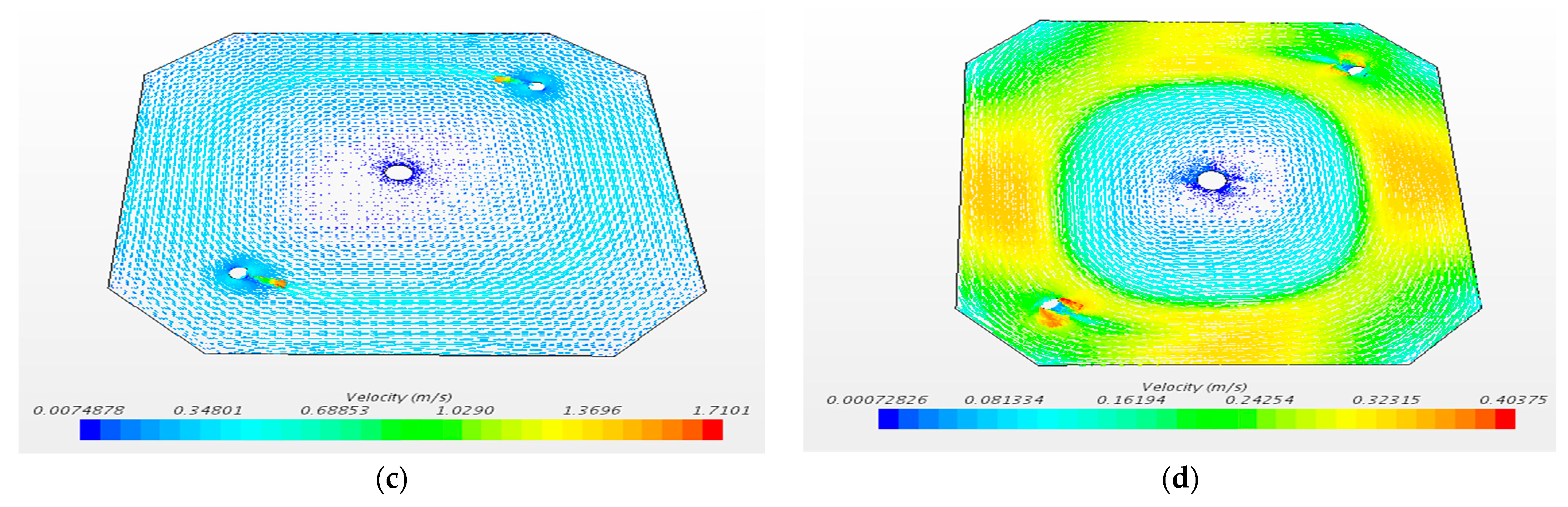
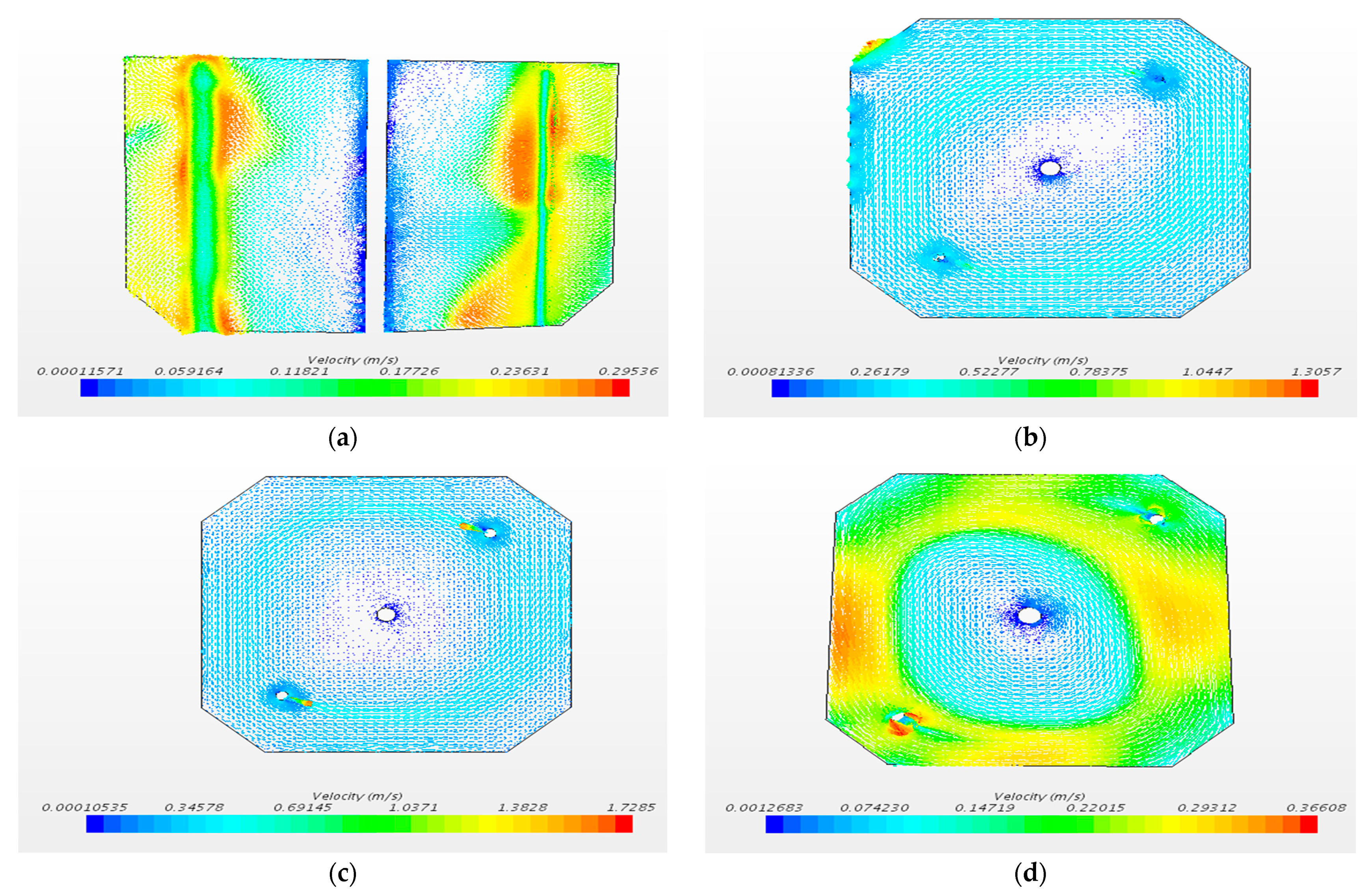
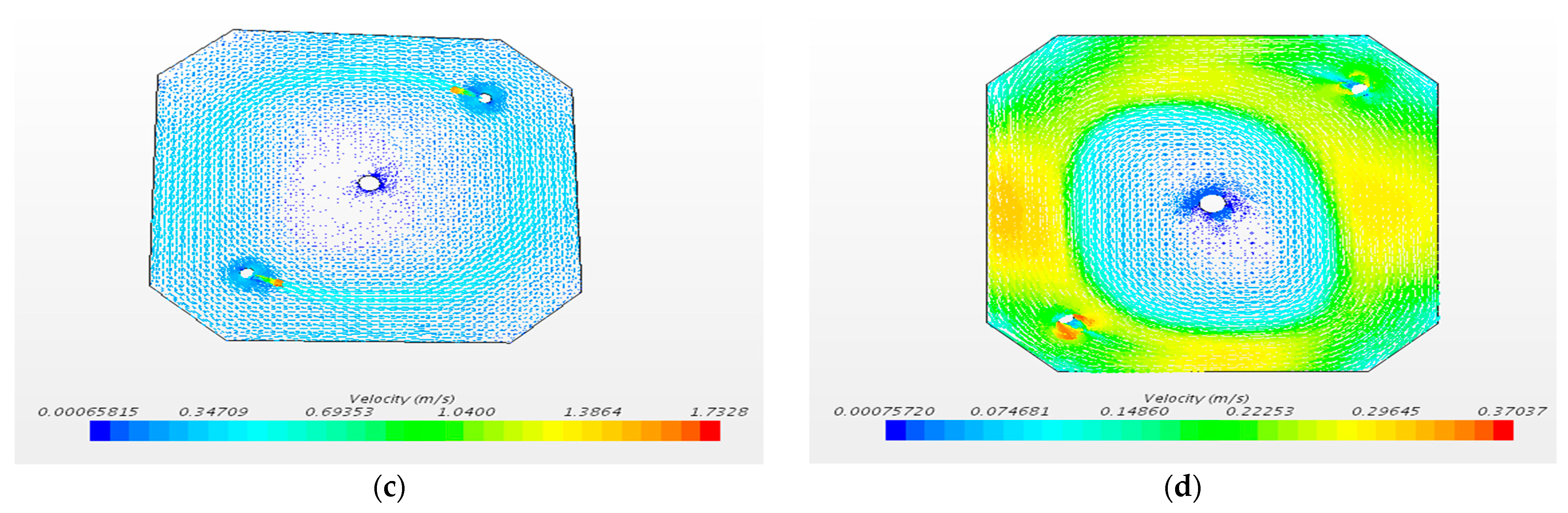
3.3. Two inlet Pipes, Central Spray Particles
- (1)
- Bottom outflow ratio of 40%
- (2)
- Bottom outflow ratio of 30%
- (3)
- Bottom outflow ratio of 20%
- (4)
- Bottom outflow ratio of 10%
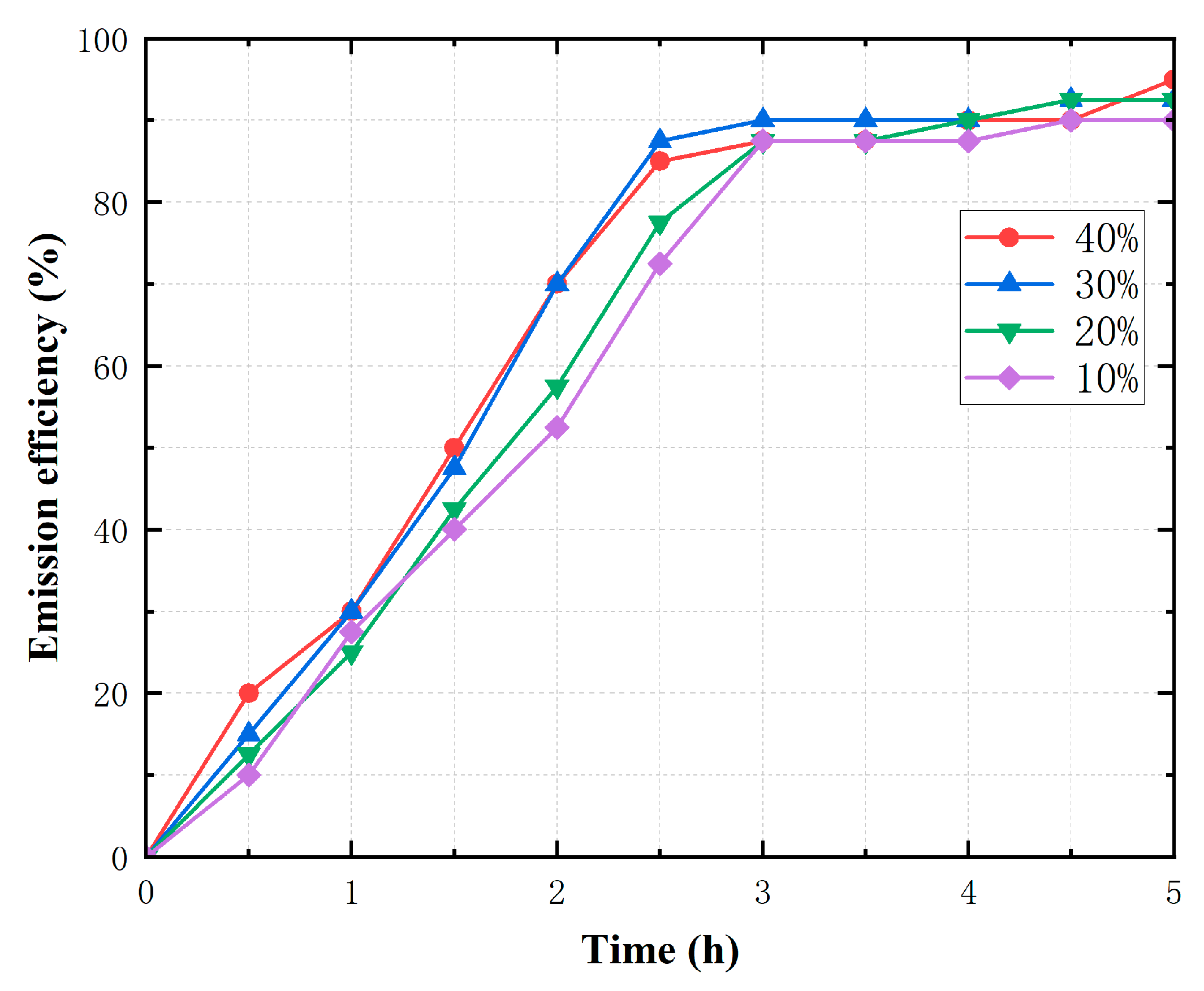
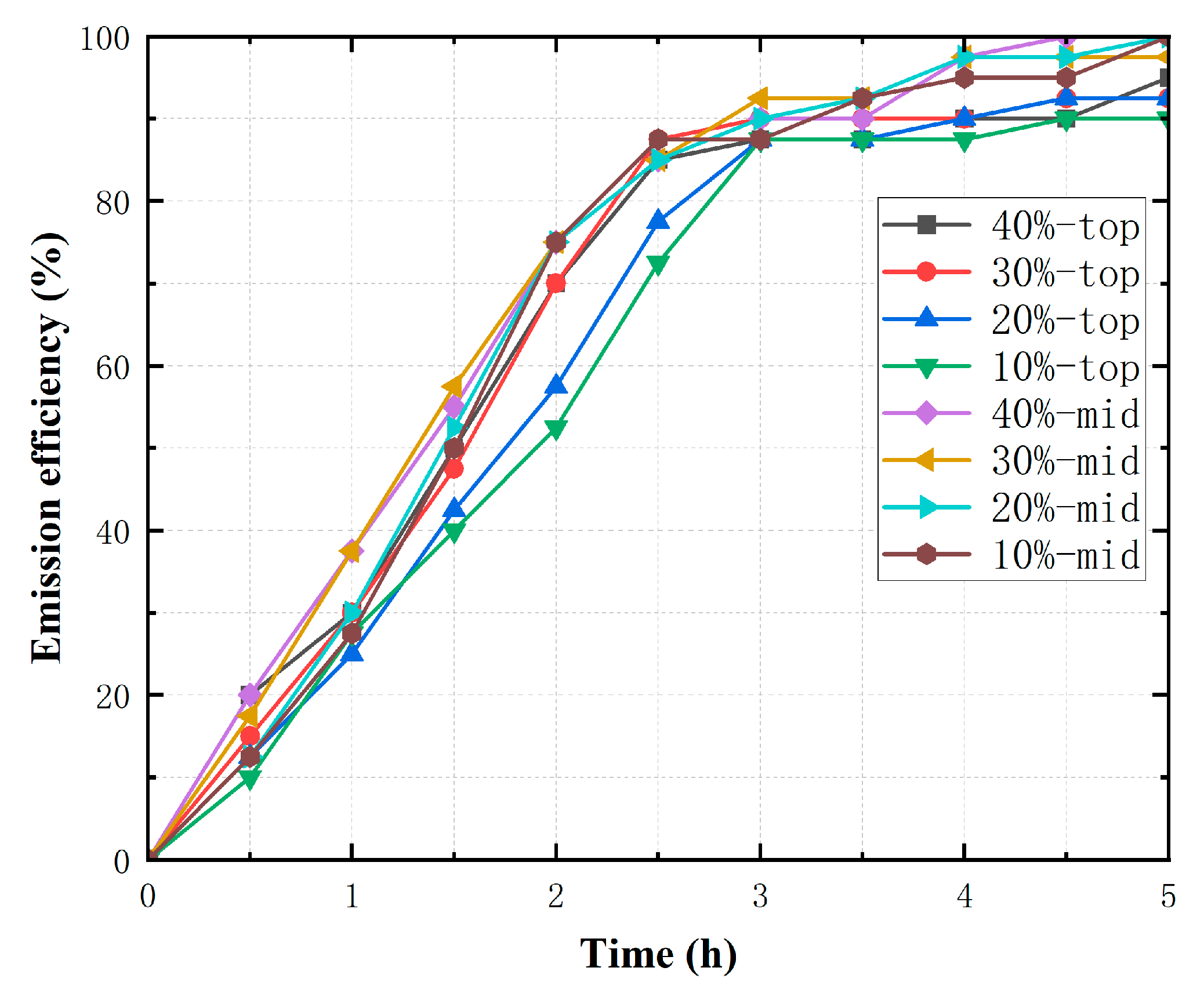
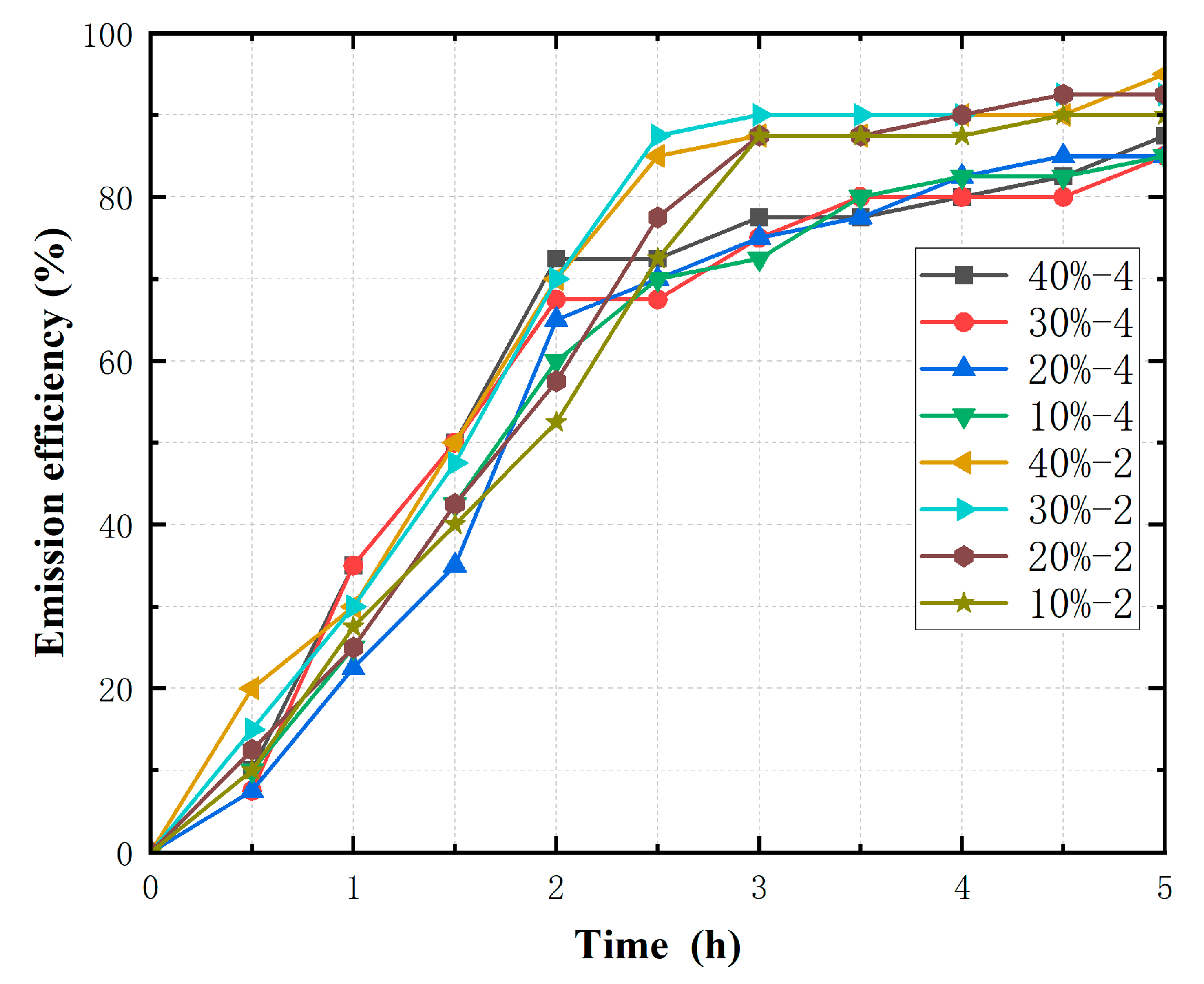
3.4. Simulation Comparison Results of Particulate Matter Emission Effect
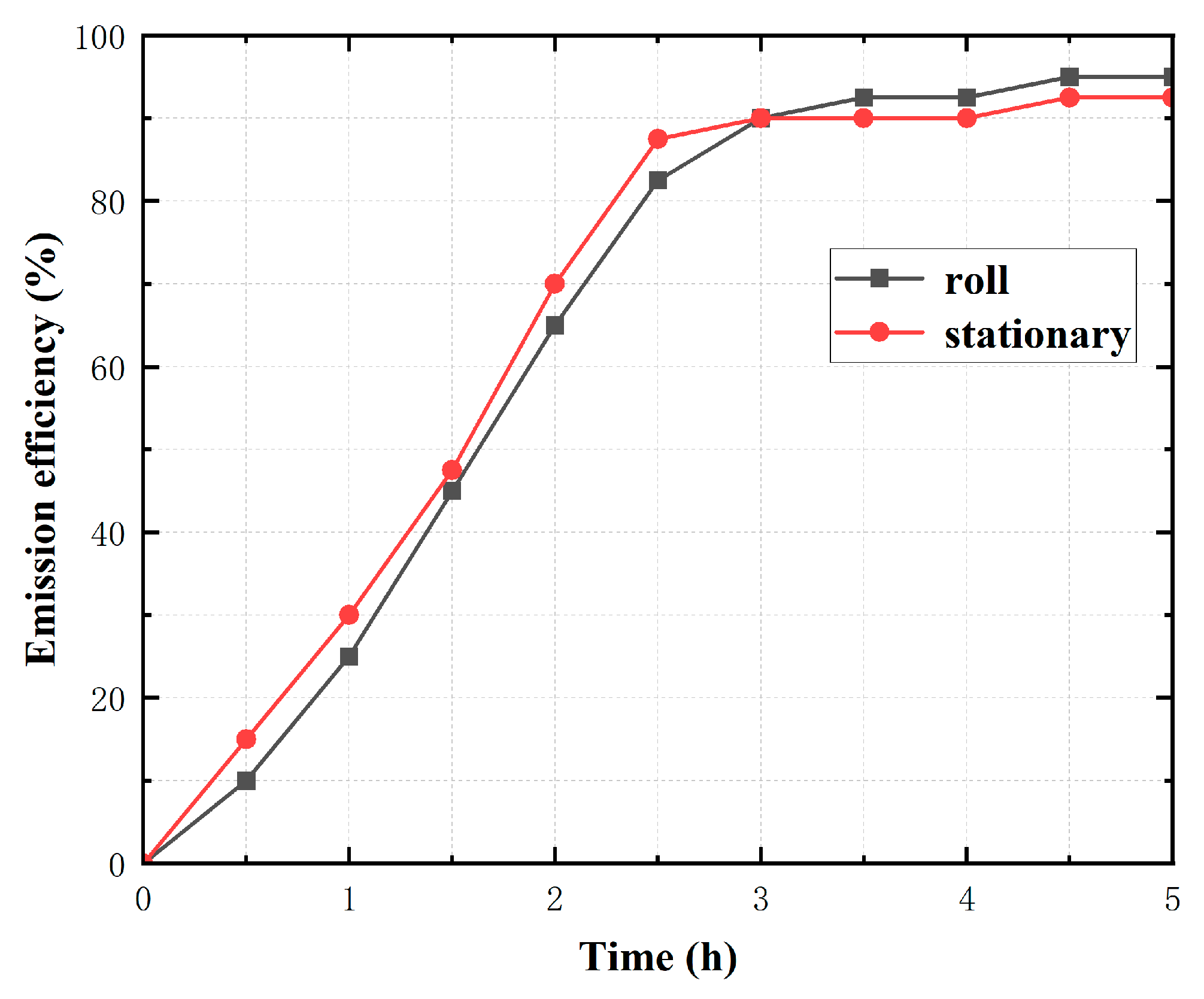
3.5. Effects of Rolling Motion
3.6. Effect of Different Inlet Flows on Discharge under Optimal Conditions
4. Conclusions
- (1)
- The change in the discharge volume at the bottom of the outlet has a relatively less significant impact on the entire flow field, and it also has less impact on the movement of particles as well as the overall emission effect of solid particles.
- (2)
- The number of inlet pipe has a certain influence on the flow field and the emission of solid particles. If the aquaculture cabin is equipped with two inlet pipes under the same inlet flow rate, the emission effect of solid particles in the aquaculture cabin seems better than with four inlet pipes. This is because the flow field velocity distribution of the two pipes is relatively uniform, and the arrangement of the four pipes strengthens the annular water circulation at the four pipes in the aquaculture cabin and reduces the flow velocity inside, but the particles are mainly discharged from the middle bottom outlet. Therefore, the discharge effect of the two pipes Is better.
- (3)
- The initial distribution of solid particles has a significant influence on the emission effect, and if the initial distribution is in the middle of the aquaculture cabin, the emission efficiency seems better than the initial distribution at the top of the aquaculture cabin.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, X.; Zeng, X.; Gualtieri, C.; Cuthbertson, A.; Wang, R.-Q.; Shao, D. Numerical Simulation of Scalar Mixing and Transport through a Fishing Net Panel. J. Mar. Sci. Eng. 2022, 10, 1511. [Google Scholar] [CrossRef]
- Wang, X.; Cuthbertson, A.; Gualtieri, C.; Shao, D. A Review on Mariculture Effluent: Characterization and Management Tools. Water 2020, 12, 2991. [Google Scholar] [CrossRef]
- Ma, C.; Zhao, Y.-P.; Bi, C.-W. Numerical study on hydrodynamic responses of a single-point moored vessel-shaped floating aquaculture platform in waves. Aquac. Eng. 2022, 96, 102216. [Google Scholar] [CrossRef]
- Joan, O.; Ingrid, M.; Lourdes, R. Comparative analysis of flow patterns in aquaculture rectangular tanks with different water inlet characteristics. Aquac. Eng. 2004, 31, 221–236. [Google Scholar]
- Lunger, A.; Rasmussen, M.R.; Laursen, J.; McLean, E. Fish stocking density impacts tank hydrodynamics. Aquaculture 2006, 254, 370–375. [Google Scholar] [CrossRef]
- Oca, J.; Masaló, I. Design criteria for rotating flow cells in rectangular aquaculture tanks. Aquac. Eng. 2007, 36, 36–44. [Google Scholar] [CrossRef]
- Lee, J.V.; Loo, L.L.; Chuah, Y.D.; Tang, P.Y.; Tan, Y.C.; Goh, W.J. The design of a culture tank in an automated recirculating aquaculture system. Int. J. Eng. Appl. Sci. 2013, 2, 67–77. [Google Scholar]
- Plew, D.R.; Klebert, P.; Rosten, T.W.; Aspaas, S.; Birkevold, J. Changes to flow and turbulence caused by different concentrations of fish in a circular tank. J. Hydraul. Res. 2015, 53, 381–392. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, B.; Lei, J.; Guan, C.; Huang, B. Numerical simulation of the hydrodynamics within octagonal tanks in recirculating aquaculture systems. Chin. J. Oceanol. Limnol. 2017, 35, 912–920. [Google Scholar] [CrossRef]
- Gorle JM, R.; Terjesen, B.F.; Summerfelt, S.T. Hydrodynamics of octagonal culture tanks with Cornell-type dual-drain system. Comput. Electron. Agric. 2018, 151, 354–364. [Google Scholar] [CrossRef]
- Shao, D.; Huang, L.; Wang, R.Q.; Gualtieri, C.; Cuthbertson, A. Flow turbulence characteristics and mass transport in the near-wake region of an aquaculture cage net panel. Water 2021, 13, 294. [Google Scholar] [CrossRef]
- Zeng, X.; Gualtieri, C.; Cuthbertson, A.; Shao, D. Experimental study of flow and mass transport in the near-wake region of a rigid planar metal net panel. Aquac. Eng. 2022, 98, 102267. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, F.; Yao, R.; Gui, F.K.; Liu, B.; Zhang, Z.K.; Feng, D.J. Optimization of inlet pipe layout position of circular circulating water aquaculture pond based on STAR-CCM +. Agric. Eng. 2021, 37, 244–251. [Google Scholar]
- Oca, J.; Masalo, I. Flow pattern in aquaculture circular tanks: Influence of flow rate, water depth, and water inlet & outlet features. Aquac. Eng. 2013, 52, 65–72. [Google Scholar]
- Masaló, I.; Oca, J. Hydrodynamics in a multivortex aquaculture tank: Effect of baffles and water inlet characteristics. Aquac. Eng. 2014, 58, 69–76. [Google Scholar] [CrossRef]
- Labatut, R.A.; Ebeling, J.M.; Bhaskaran, R.; Timmons, M.B. Modeling hydrodynamics and path/residence time of aquaculture-like particles in a mixed-cell raceway (MCR) using 3D computational fluid dynamics (CFD). Aquac. Eng. 2015, 67, 39–52. [Google Scholar] [CrossRef]
- Shi, M. CFD Simulation and Optimization of Multiphase Flow in Recirlation Biofloc Technology System; Zhejiang University: Hangzhou, China, 2018; (In Chinese with English abstract). [Google Scholar]
- An, C.H.; Sin, M.G.; Kim, M.J.; Jong, I.B.; Song, G.J.; Choe, C. Effect of bottom drain positions on circular tank hydraulics: CFD simulations. Aquac. Eng. 2018, 83, 138–150. [Google Scholar] [CrossRef]
- Dauda, A.B.; Ajadi, A.; Tola-Fabunmi, A.S.; Akinwole, A.O. Waste production in aquaculture: Sources, components and managements in different culture systems. Aquac. Fish. 2019, 4, 81–88. [Google Scholar] [CrossRef]
- Gorle, J.M.R.; Terjesen, B.F.; Mota, V.C.; Summerfelt, S. Water velocity incommercial RAS culture tanks for Atlantic salmon smolt production. Aquac. Eng. 2018, 81, 89–100. [Google Scholar] [CrossRef]
- Chen, H.; Li, Y.; Xiong, Y.; Wei, H.; Saxén, H.; Yu, Y. Effect of particle holdup on bubble formation in suspension medium by VOF–DPM simulation. Granular Matter 2022, 24, 120. [Google Scholar] [CrossRef]
- LaCasce, J.H. Statistics from Lagrangian observations. Prog. Oceanogr. 2008, 77, 1–29. [Google Scholar] [CrossRef]
- Govan, A.H.; Hewitt, G.F.; Ngan, C.F. Particle motion in a turbulent pipe flow. Int. J. Multiph. Flow 1989, 15, 471–481. [Google Scholar] [CrossRef]
- Cui, M.; Wang, J.; Guo, X. Numerical analysis of water environment flow field characteristics of aquaculture ship under rolling motion. Chin. Shipbuild. 2020, 61, 204–215. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position (m) | Speed (m/s) | ||
|---|---|---|---|
| H = 5 | (A) 1.26 million 0.101 | (B) 2.85 million 0.121 | (C) 6.42 million 0.112 |
| H = 10 | 0.098 | 0.103 | 0.109 |
| H = 15 | 0.099 | 0.101 | 0.106 |
| Entire flow field | 0.099 | 0.108 | 0.109 |
| Fluid Density | Fluid Viscosity | Concentration of Solid Particles | Density of Solid Particles | Elastic Coefficient |
|---|---|---|---|---|
| 1025 kg/m3 | 1.21 7 × 10−3 Pa·s | 40 mg/L | 1050 kg/m3 | 0.5 |
| Detention Time (h) | 100% (1.52 m/s) | 80% (1.216 m/s) | 60% (0.912 m/s) | 40% (0.608 m/s) | ||||
|---|---|---|---|---|---|---|---|---|
| 0 | 40 | 0% | 40 | 0% | 40 | 0% | 40 | 0% |
| 0.5 | 34 | 15% | 33 | 17.5% | 33 | 17.5% | 32 | 20% |
| 1 | 28 | 30% | 28 | 30% | 26 | 35% | 26 | 35% |
| 1.5 | 21 | 47.5% | 20 | 50% | 19 | 52.5% | 15 | 62.5% |
| 2 | 12 | 70% | 10 | 75% | 10 | 75% | 7 | 82.5% |
| 2.5 | 5 | 87.5% | 6 | 85% | 4 | 90% | 4 | 90% |
| 3 | 4 | 90% | 3 | 92.5% | 3 | 92.5% | 4 | 90% |
| 3.5 | 4 | 90% | 3 | 92.5% | 3 | 92.5% | 2 | 95% |
| 4 | 4 | 90% | 1 | 97.5% | 1 | 97.5% | 1 | 97.5% |
| 4.5 | 3 | 92.5% | 1 | 97.5% | 1 | 100% | 1 | 97.5% |
| 5 | 3 | 92.5% | 1 | 97.5% | 0 | 100% | 0 | 100% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, Z.; He, M.; Zhu, W.; Sun, Y.; Hou, X. Analysis of Flow Field Characteristics of Aquaculture Cabin of Aquaculture Ship. J. Mar. Sci. Eng. 2023, 11, 390. https://doi.org/10.3390/jmse11020390
Xiong Z, He M, Zhu W, Sun Y, Hou X. Analysis of Flow Field Characteristics of Aquaculture Cabin of Aquaculture Ship. Journal of Marine Science and Engineering. 2023; 11(2):390. https://doi.org/10.3390/jmse11020390
Chicago/Turabian StyleXiong, Zhixin, Mingxuan He, Wenyang Zhu, Yu Sun, and Xianrui Hou. 2023. "Analysis of Flow Field Characteristics of Aquaculture Cabin of Aquaculture Ship" Journal of Marine Science and Engineering 11, no. 2: 390. https://doi.org/10.3390/jmse11020390