
Coupled Translational–Rotational Stability Analysis of a Submersible Ocean Current Converter Platform Mooring System under Typhoon Wave

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
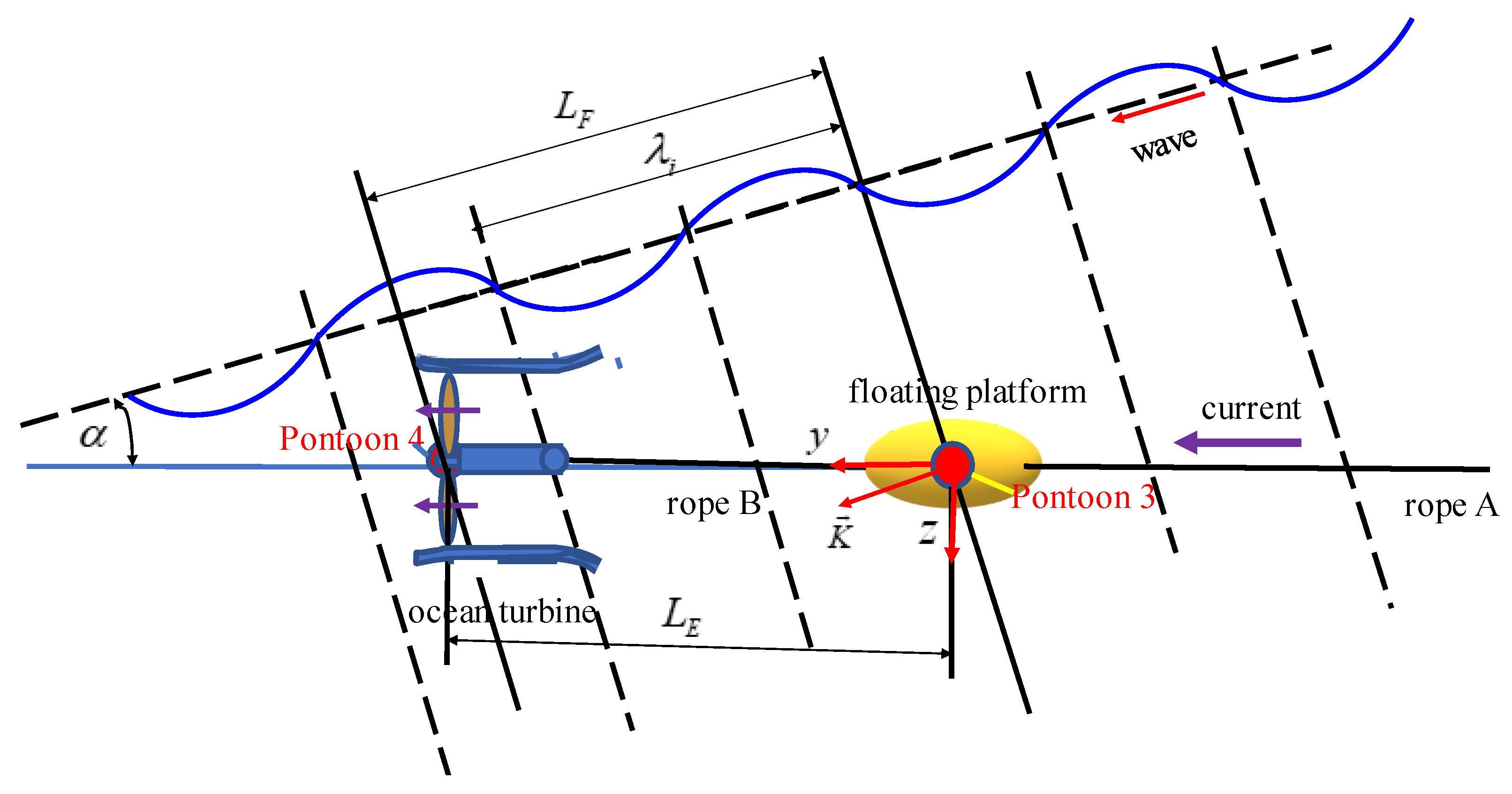
2. Mathematical Model
- −
- The current flow is steady.
- −
- The HSPE mooring ropes are used.
- −
- Under the ocean velocity, the deformed configuration of the HSPE rope is nearly straight.
- −
- The elongation strain of the ropes is small.
- −
- The translational and rotational displacements of the components are small.
- −
- The tension of the rope is considered uniform.
Static Displacements and Equilibrium under the Steady Current Only
3. Dynamic Equilibrium
3.1. Translational Motion in the x-Axis Direction
3.1.1. Equation of Heaving Motion for Pontoon 3
3.1.2. Equation of Heaving Motion for Pontoon 4
3.1.3. Equation of Heaving Motion of the Platform
3.1.4. Equation of Heaving Motion for the Convertor
3.2. Translational Motion in the y-Direction
3.2.1. Equation of Surging Motion of the Platform
3.2.2. Equation of Surging Motion of the Convertor in the y-Direction
3.2.3. Equation of Surging Motion of the Pontoon 3 in the y-Direction
3.2.4. Equation of Surging Motion of the Pontoon 4 in the y-Direction
3.3. Translational Motion in the z-Direction
3.3.1. Equation of Swaying Motion of the Platform
3.3.2. Equation of Swaying Motion of the Convertor
3.3.3. Equation of Swaying Motion for the Pontoon 3
3.3.4. Equation of Swaying Motion of the Pontoon 4
3.4. Rotational Motion
3.4.1. Equation of Yawing Motion of the Convertor
3.4.2. Equation of Rolling Motion of the Convertor
3.4.3. Equation of Pitching Motion of the Convertor
3.4.4. Equation of Yawing Motion of the Platform
3.4.5. Equation of Rolling Motion of the Platform
3.4.6. Equation of Pitching Motion of the Platform
4. Force Vibration Equation of System
5. Determination of Hydrodynamic Parameters
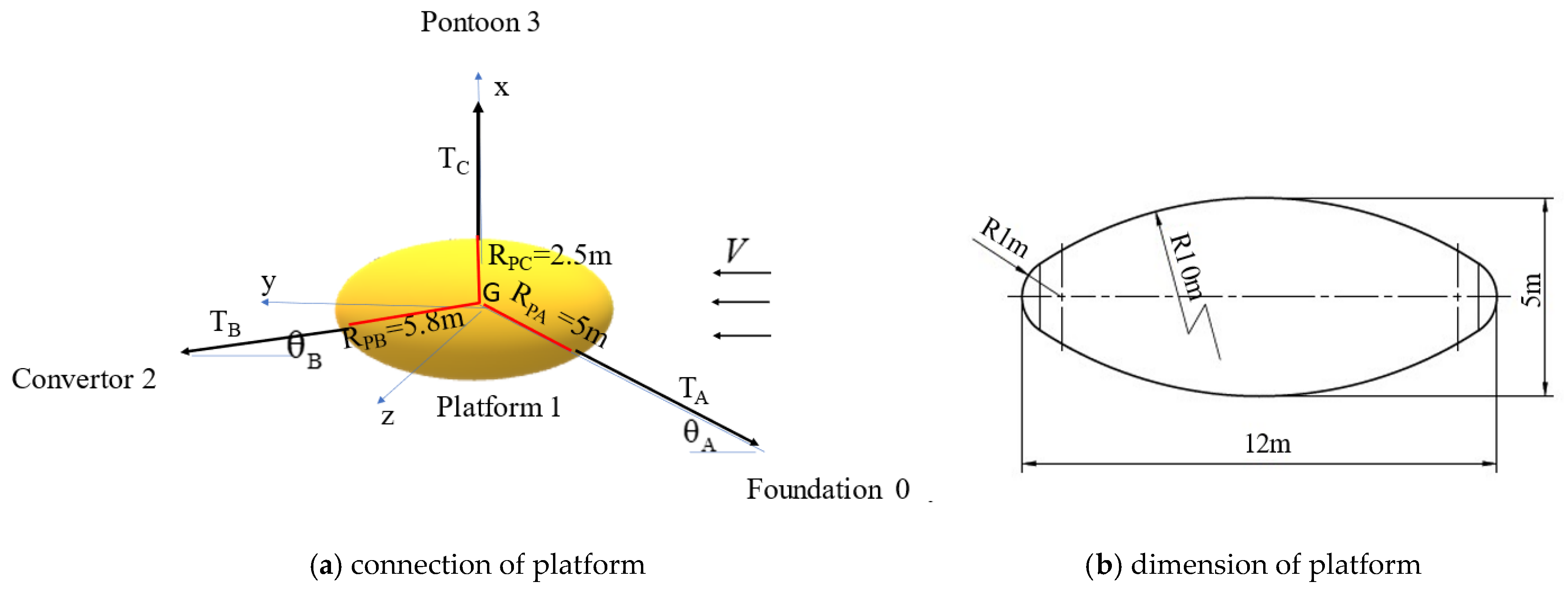
5.1. Hydrodynamic Parameter of Floating Platform
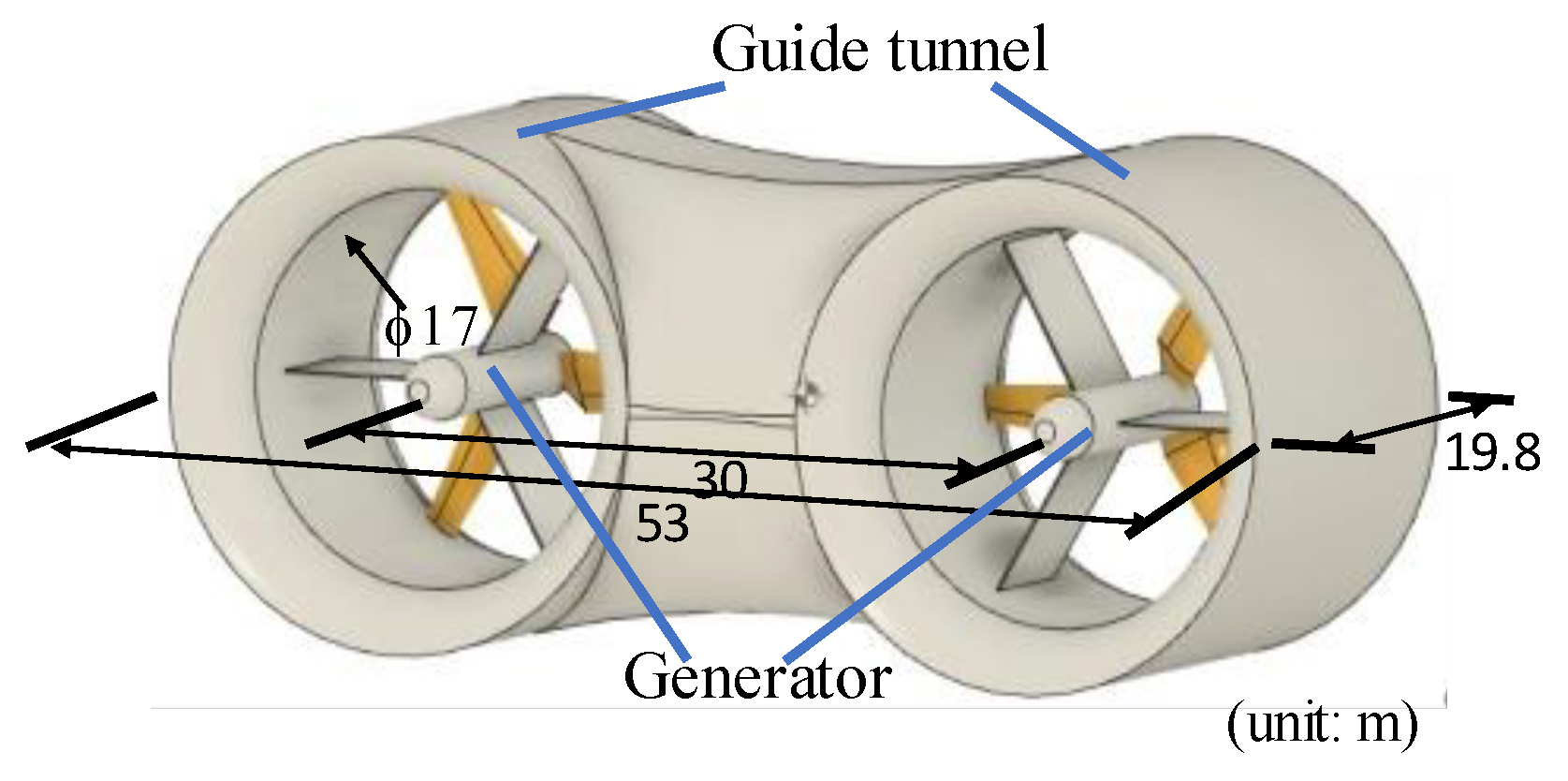
5.1.1. Dimension of Platform
5.1.2. Hydrodynamic Damping and Stiffness Parameters of Platform
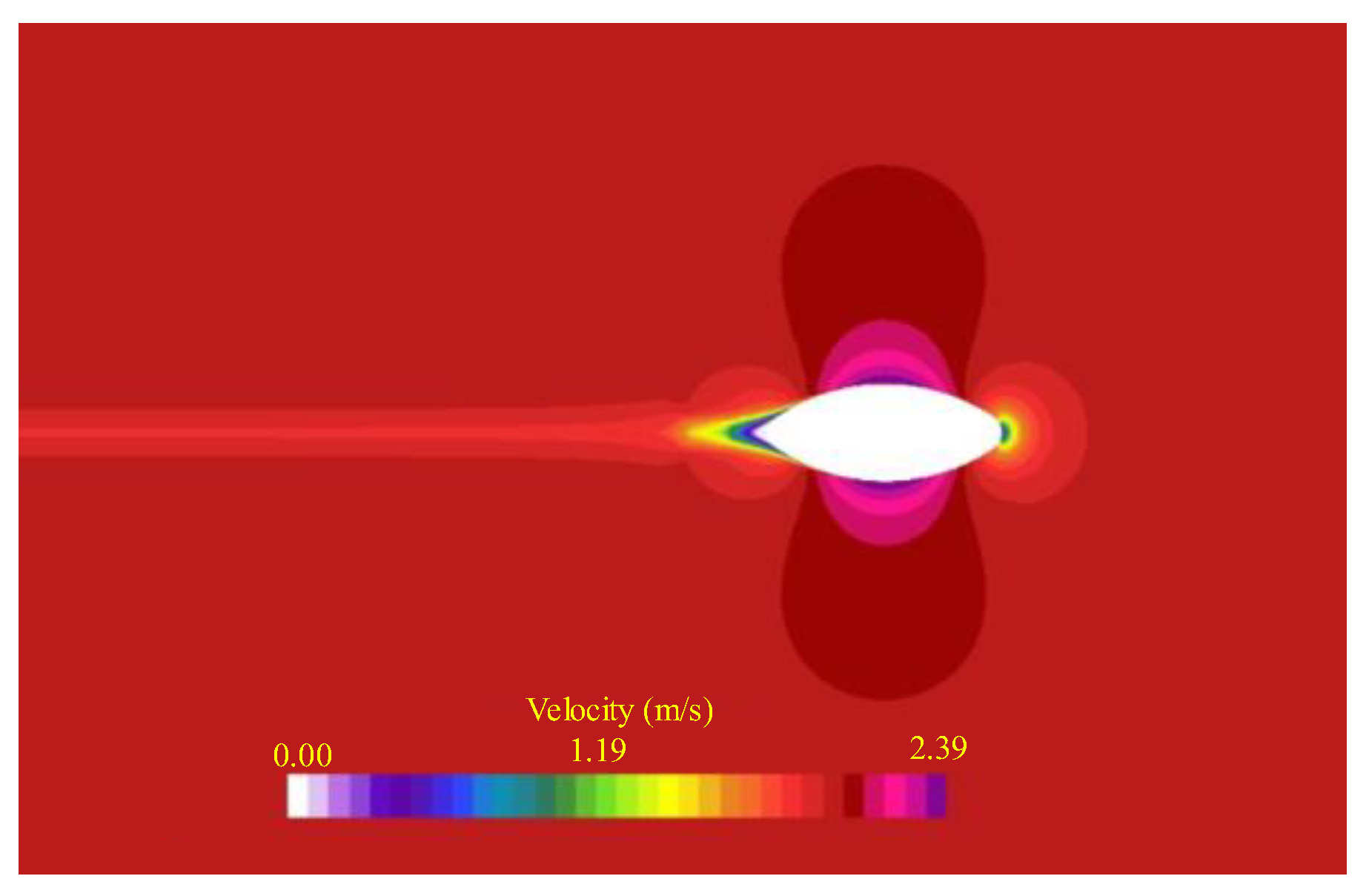
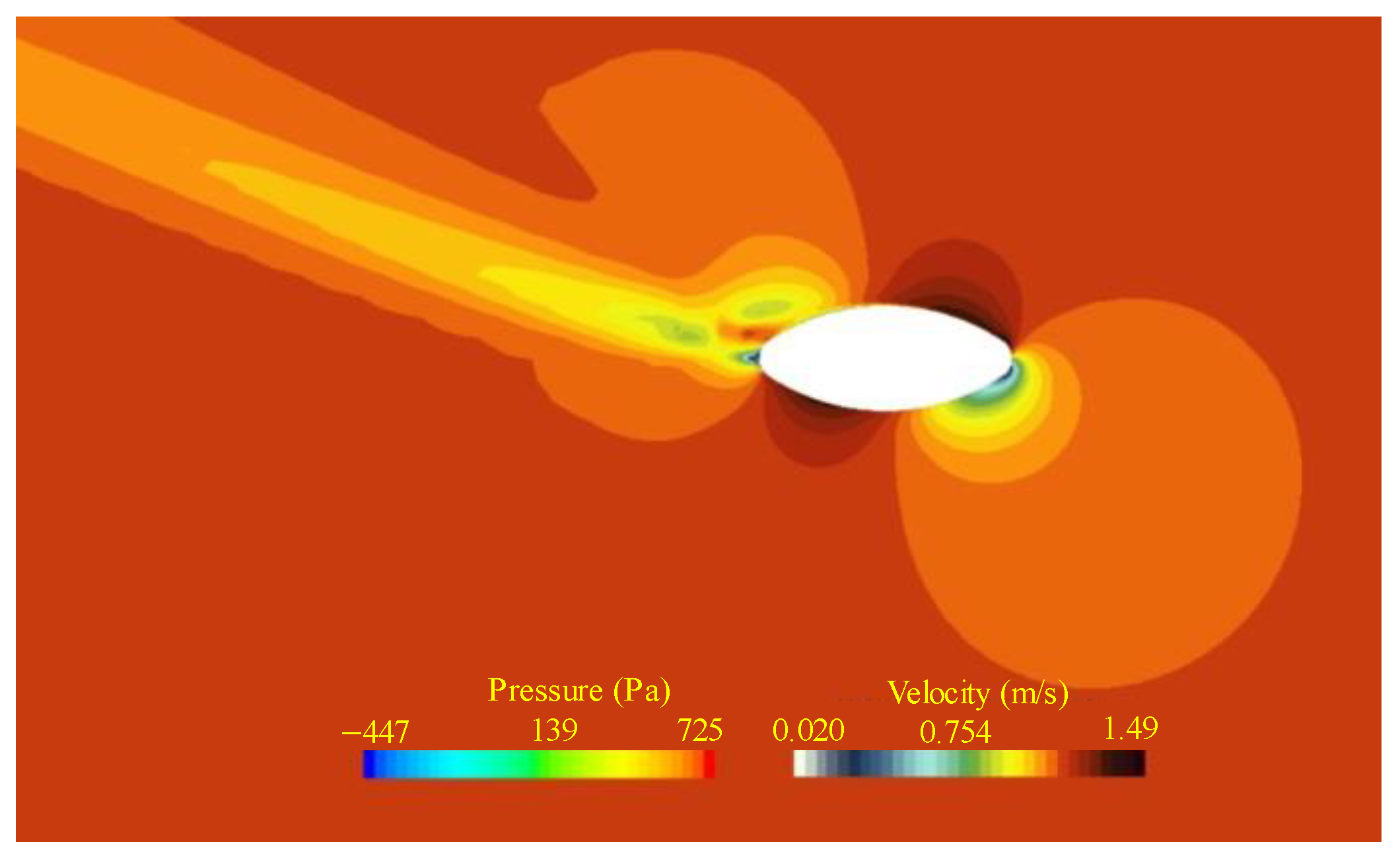
5.2. Hydrodynamic Parameter of Convertor
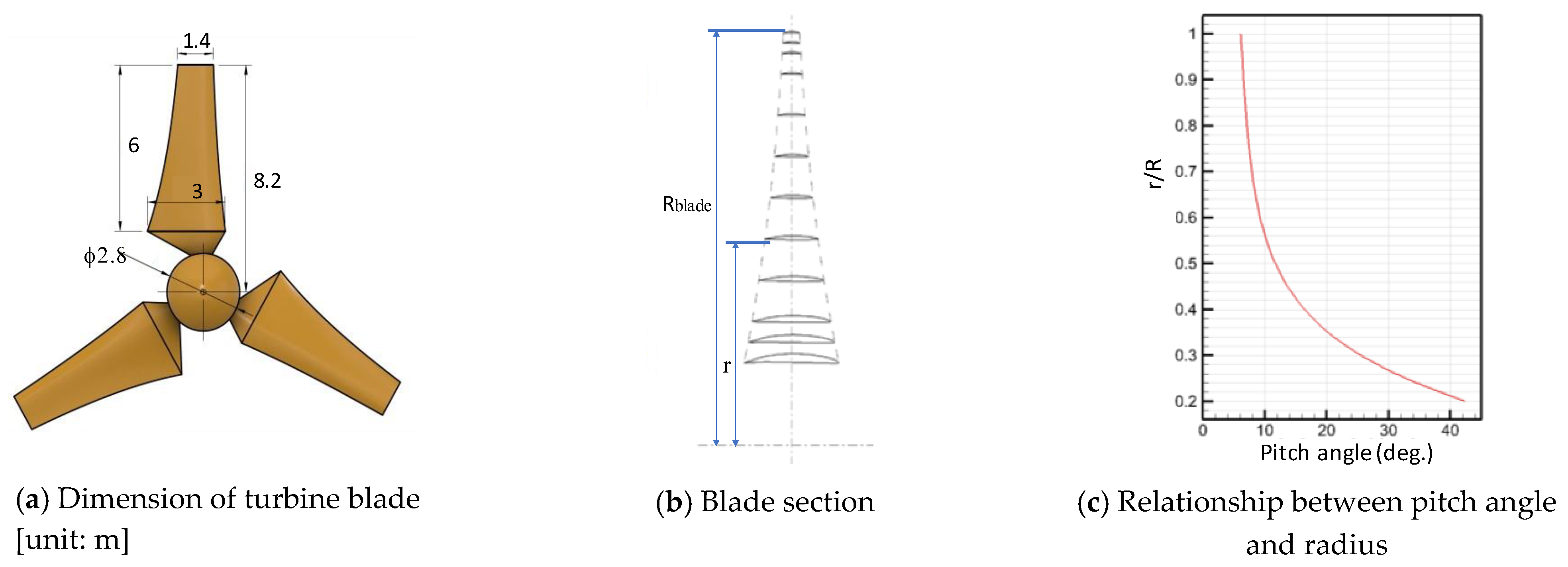
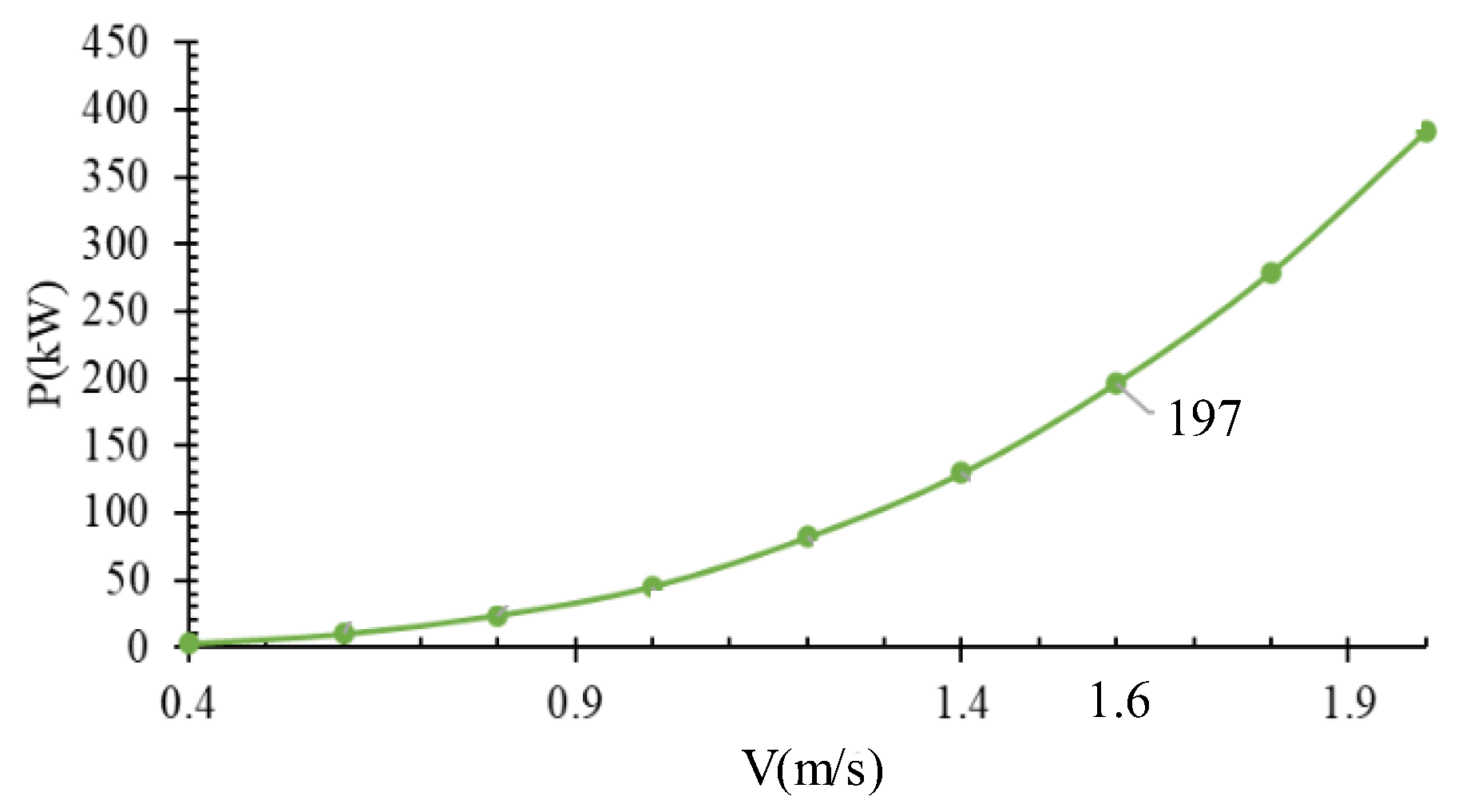
5.2.1. The Turbine Blade and Its Performance
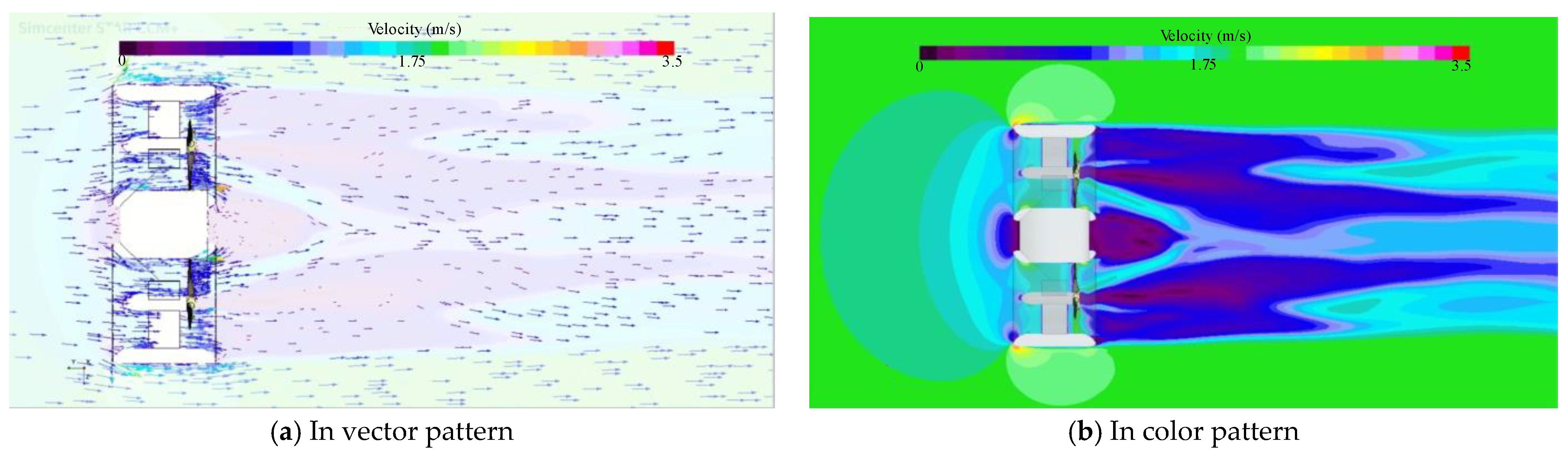
5.2.2. Hydrodynamic Damping Parameter of Convertor
6. Solution Method
6.1. Dynamic Displacement
6.2. Dynamic Tensions of Ropes
7. Numerical Results and Discussion
8. Conclusions
- (1)
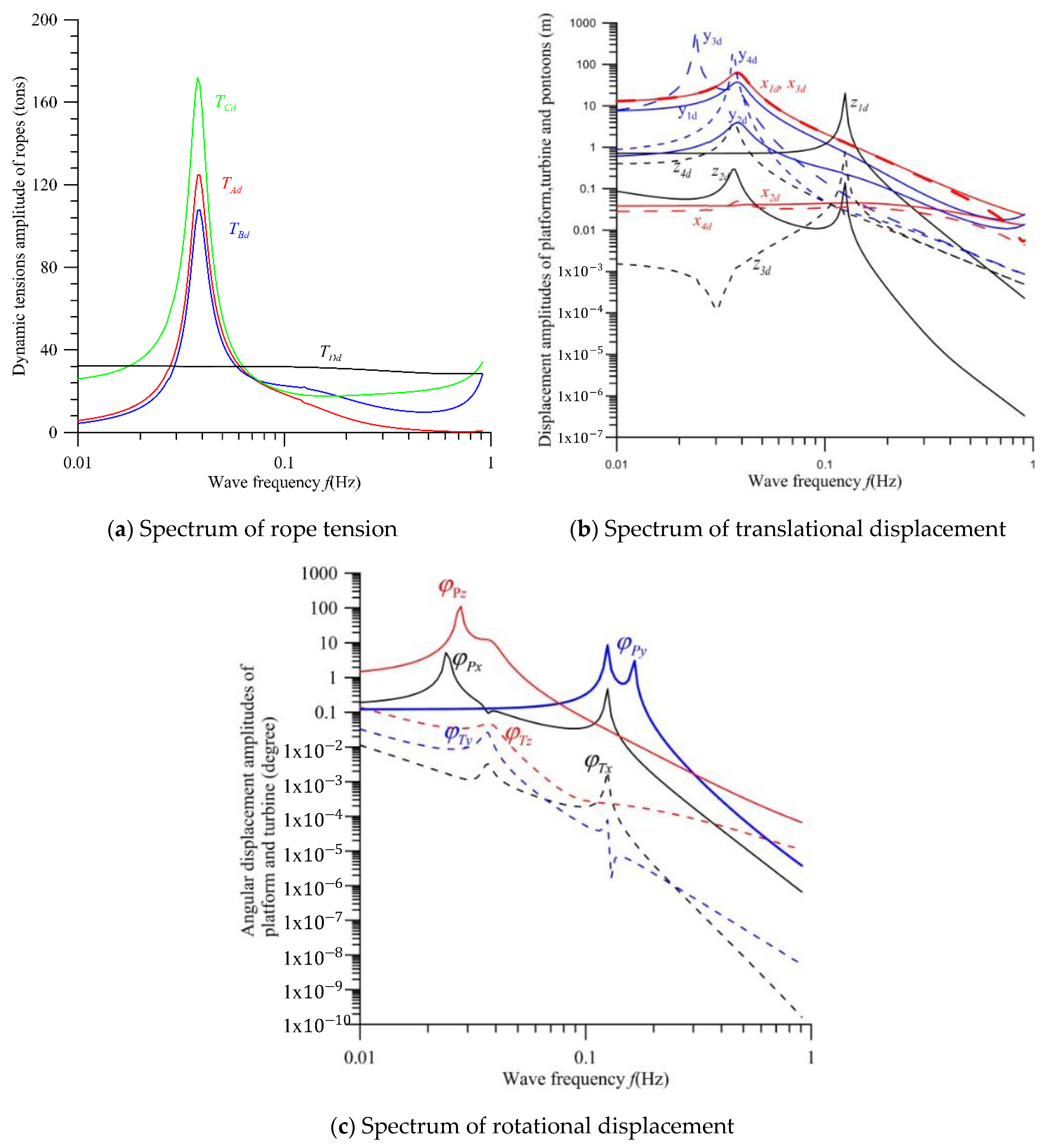
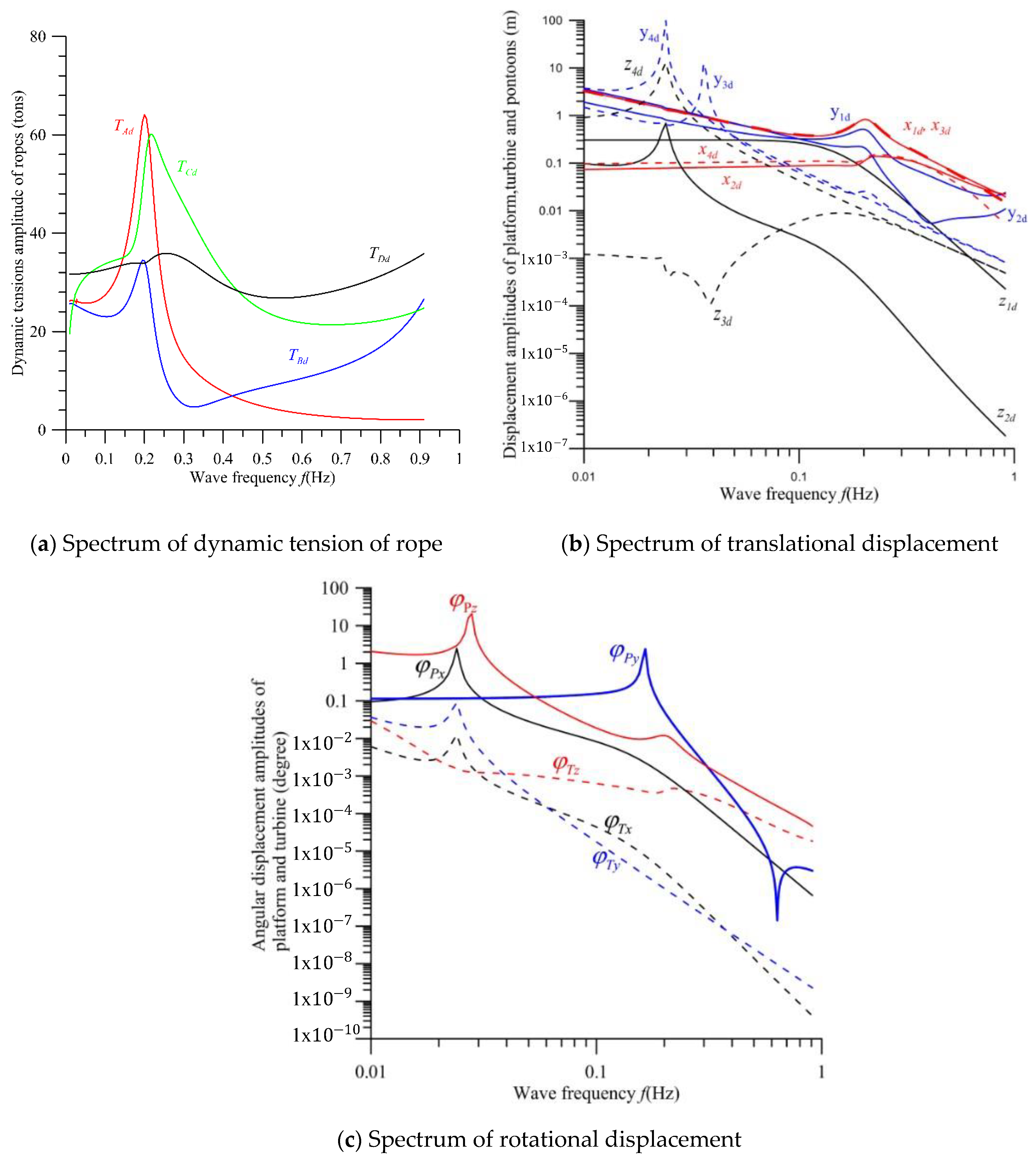
- The translational displacements of pontoons 3 and 4 are more obvious than those of the platform and convertor.
- (2)
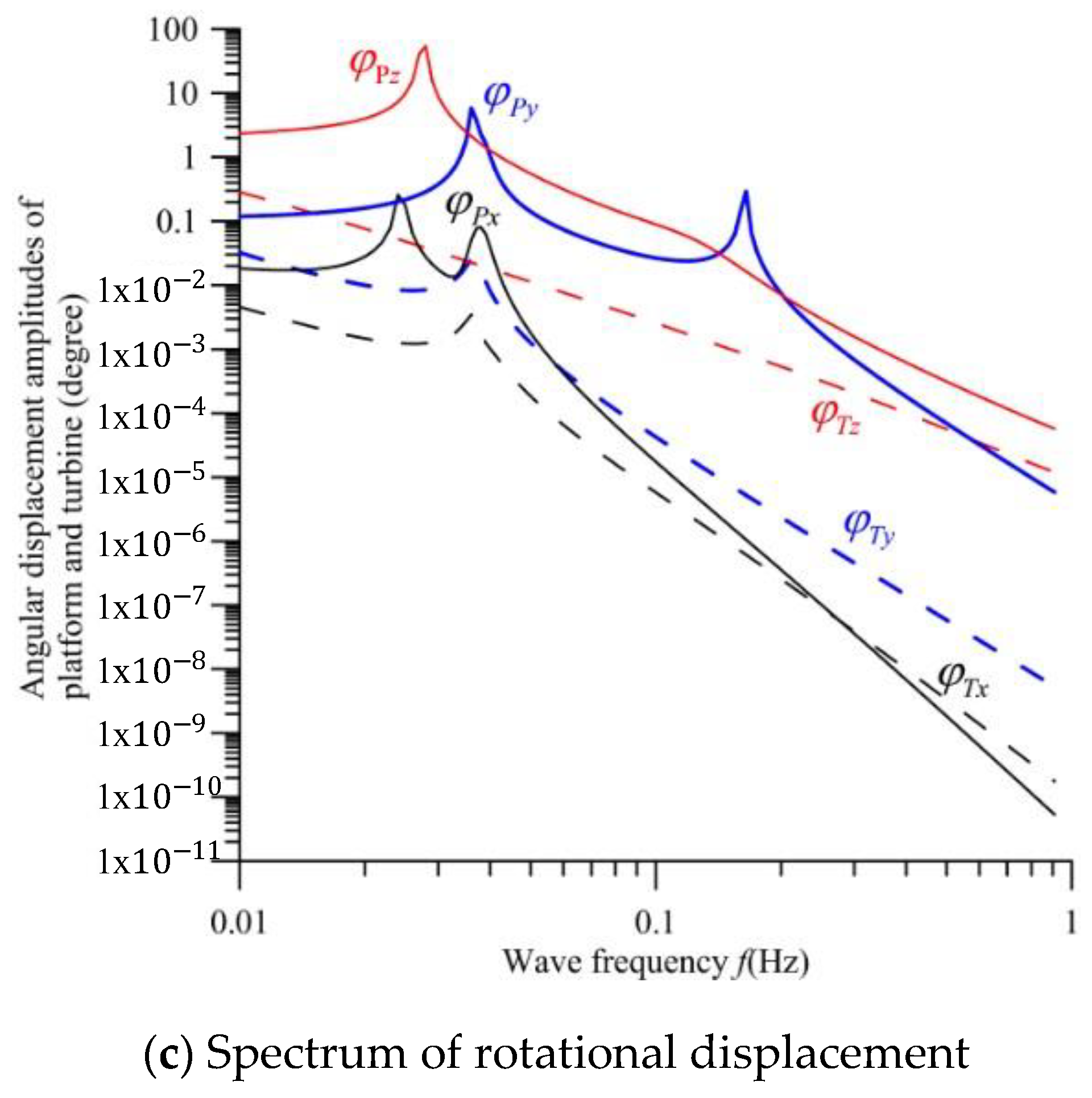
- The angular displacement in pitch motion of the platform is greatly larger than those of the yaw and roll motions.
- (3)
- The translational and angular displacements of the platform are obviously higher than those of the convertor.
- (4)
- For this proposed mooring system, all the displacements of the convertor are kept small under the significant wave impact. Therefore, the relative flow velocity and direction of the convertor to the current are almost constant such that the power efficiency of convertor can maintain to be stable and high.
- (5)
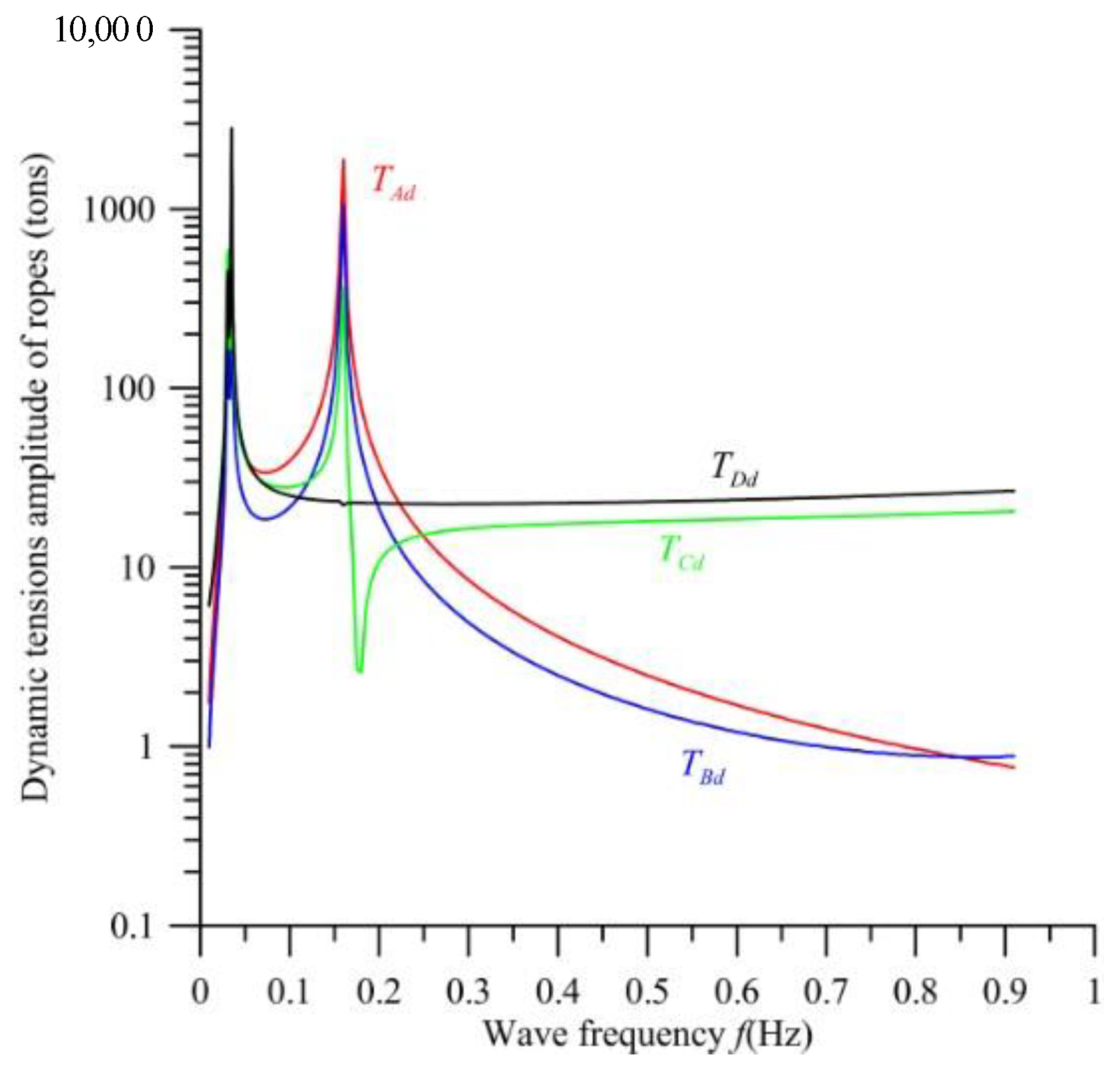
- If there is a mooring system without the hydrodynamic damping of the convertor, the resonant tensions are significantly increased and greatly over than the rope fracture strength.
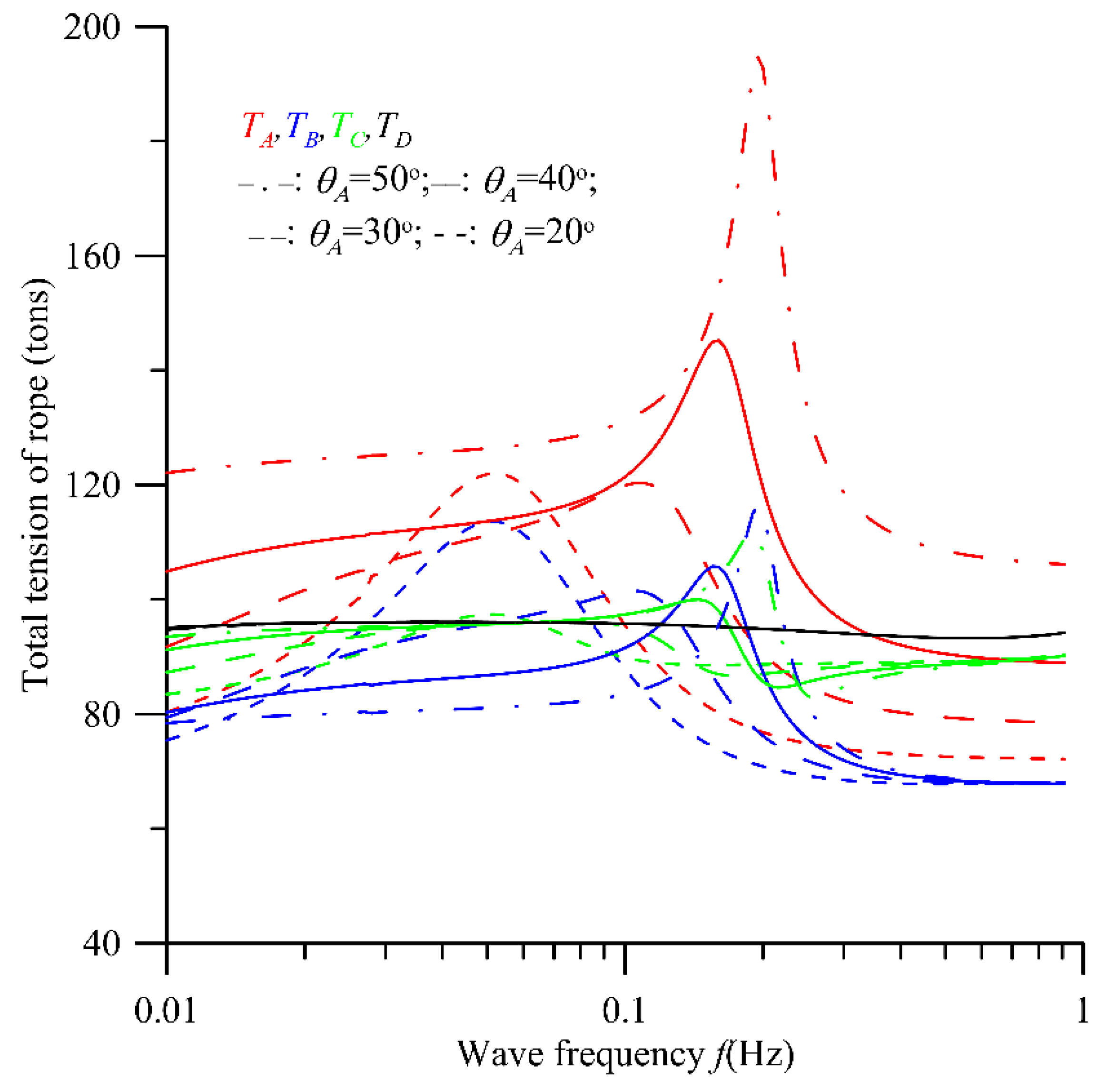
- (6)
- The resonant frequency of the mooring system and the total tension TA increases with the setting angle θA of rope A.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| ABX, ABT | = cross-sectional area of surfaced cylinder of pontoons 3 and 4, respectively |
| ABY, ATY | = damping area of platform and convertor under current, respectively |
| C | = matrix of damping |
| = damping coefficient of floating platform and convertor | |
| Ei | = Young’s modulus of rope i, i = A, B, C, D |
| F | = vector of force |
| FB | = buoyance |
| fw | = wave frequency |
| fkj | = hydrodynamic force of element k in the j-direction |
| , | = the drag of the floating platform and the convertor under steady current |
| Hbed | = depth of seabed |
| Hs | = significant wave height |
| HW0 | = amplitude frequency of wave |
| = mass moment of inertia of the convertor and the platform about the j-axis | |
| g | = gravity |
| K | = matrix of stiffness |
| Kid | = effective spring constant of rope i, |
| = wave vector of the i-th regular wave | |
| Li, | = length of rope i, i = A, B, C, D |
| LE, | = horizontal distance between the convertor and platform, |
| M | = matrix of mass |
| Mi | = mass of element i |
| = effective mass of rope A in the i-direction | |
| = hydrodynamic moment of convertor or platform about the i-axis | |
| = coordinate | |
| Rblade | = radius of blade |
| Ti | = tension force of rope i |
| t | = time variable |
| TSR | = tip speed ratio, |
| V | = ocean current velocity |
| Wi | = weight of component i |
| wPE | = weight per unit length of HSPE |
| xi, yi, zi | = displacements of component i |
| xw | = sea surface elevation |
| α | = relative angle between the directions of wave and current |
| β | = hydrodynamic parameter ratio of different convertors and platforms to those presented in Section 5 |
| ρ | = density of sea water |
| Ω | = angular frequency of wave |
| ω | = angular speed of turbine |
| = angular displacement of convertor or platform about the j-axis | |
| = phase delay of wave, | |
| θi | = angles of rope i |
| λ | = length of wave |
| δi | = elongation of rope i |
| Subscript: | |
| 0~4 | = mooring foundation, floating platform, convertor, and two pontoons, respectively |
| A, B, C, D | = ropes A, B, C, and D, respectively |
| s, d | = static and dynamic, respectively |
| PE | = PE dyneema rope |
| P | = platform |
| T | = convertor |
Appendix A. Effective Masses
Appendix B. Hydrodynamic Damping and Stiffness Parameters of Platform
Appendix B.1. Hydrodynamic Damping Parameters of Platform
Appendix B.2. Hydrodynamic Stiffness Parameters of Platform
Appendix C. Hydrodynamic Damping and Stiffness Parameters of Convertor
Appendix C.1. Hydrodynamic Damping Parameters
Appendix C.2. Hydrodynamic Stiffness Parameters
Appendix D. Elements of the Mass Matrix
Appendix E. Elements of the Damping Matrix
Appendix F. Elements of the Stiffness Matrix
References
- Chen, Y.Y.; Hsu, H.C.; Bai, C.Y.; Yang, Y.; Lee, C.W.; Cheng, H.K.; Shyue, S.W.; Li, M.S. Evaluation of test platform in the open sea and mounting test of KW Kuroshio power-generating pilot facilities. In Proceedings of the 2016 Taiwan Wind Energy Conference, Keelung, Taiwan, 24–25 November 2016. [Google Scholar]
- IHI; NEDO. The Demonstration Experiment of the IHI Ocean Current Turbine Located off the Coast of Kuchinoshima Island, Kagoshima Prefecture, Japan, 14 August 2017. Available online: https://tethys.pnnl.gov/project-sites/ihi-ocean-current-turbine (accessed on 28 August 2021).
- Nobel, D.R.; O’Shea, M.; Judge, F.; Robles, E.; Martinez, R.F.; Thies, P.R.; Johanning, L.; Corlay, R.; Davey, T.A.D.; Vejayan, N.; et al. Standardising Marine Renewable Energy Testing: Gap Analysis and Recommendations for Development of Standards. J. Mar. Sci. Eng. 2021, 9, 971. [Google Scholar] [CrossRef]
- Lin, S.M.; Chen, Y.Y.; Hsu, H.C.; Li, M.S. Dynamic Stability of an Ocean Current Turbine System. J. Mar. Sci. Eng. 2020, 8, 687. [Google Scholar] [CrossRef]
- C´atipovic, I.; Alujevic, N.; Rudan, S.; Slapničar, V. Numerical Modelling for Synthetic Fibre Mooring Lines Taking Elongation and Contraction into Account. J. Mar. Sci. Eng. 2021, 9, 417. [Google Scholar] [CrossRef]
- Lin, S.M.; Chen, Y.Y. Dynamic stability and protection design of a submarined floater platform avoiding Typhoon wave impact. J. Mar. Sci. Eng. 2021, 9, 977. [Google Scholar] [CrossRef]
- Lin, S.M.; Chen, Y.Y.; Liauh, C.T. Dynamic stability of the coupled pontoon-ocean turbine-floater platform-rope system under harmonic wave excitation and steady ocean current. J. Mar. Sci. Eng. 2021, 9, 1425. [Google Scholar] [CrossRef]
- Lin, S.M.; Liauh, C.T.; Utama, D.W. Design and dynamic stability analysis of a submersible ocean current generator-platform mooring system under typhoon irregular wave. J. Mar. Sci. Eng. 2022, 10, 538. [Google Scholar] [CrossRef]
- Davidson, J.; Ringwood, J.V. Mathematical Modelling of Mooring Systems for Wave Energy Converters—A Review. Energies 2017, 10, 666. [Google Scholar] [CrossRef] [Green Version]
- Chen, D.; Nagata, S.; Imai, Y. Modelling wave-induced motions of a floating WEC with mooring lines using the SPH method. In Proceedings of the 3rd Asian Wave and Tidal Energy Conference, Marina Bay Sands, Singapore, 25–27 October 2016; pp. 24–28. [Google Scholar]
- Xiang, G.; Xu, S.; Wang, S.; Soares, C.G. Advances in Renewable Energies Offshore: Comparative Study on Two Different Mooring Systems for a Buoy; Taylor & Francis Group: London, UK, 2019; pp. 829–835. [Google Scholar]
- Paduano, B.; Giorgi, G.; Gomes, R.P.F.; Pasta, E.; Henriques, J.C.C.; Gato, L.M.C.; Mattiazzo, G. Experimental Validation and Comparison of Numerical Models for the Mooring System of a Floating Wave Energy Converter. J. Mar. Sci. Eng. 2020, 8, 565. [Google Scholar] [CrossRef]
- Touzon, I.; Nava, V.; Miguel, B.D.; Petuya, V. A Comparison of Numerical Approaches for the Design of Mooring Systems for Wave Energy Converters. J. Mar. Sci. Eng. 2020, 8, 523. [Google Scholar] [CrossRef]
- Xiang, G.; Xiang, X.; Yu, X. Dynamic Response of a SPAR-Type Floating Wind Turbine Foundation with Taut Mooring System. J. Mar. Sci. Eng. 2022, 10, 1907. [Google Scholar] [CrossRef]
- Anagnostopoulos, S.A. Dynamic response of offshore platforms to extreme waves including fluid-structure interaction. Eng. Struct. 1982, 4, 179–185. [Google Scholar] [CrossRef]
- Bose, C.; Badrinath, S.; Gupta, S.; Sarkar, S. Dynamical stability analysis of a fluid structure interaction system using a high fidelity Navier-Stokes solver. Procedia Eng. 2016, 144, 883–890. [Google Scholar] [CrossRef] [Green Version]
- Belibassakis, K.A. A boundary element method for the hydrodynamic analysis of floating bodies in variable bathymetry regions. Eng. Anal. Bound. Elem. 2008, 32, 796–810. [Google Scholar] [CrossRef]
- Tsui, Y.Y.; Huang, Y.C.; Huang, C.L.; Lin, S.W. A finite-volume-based approach for dynamic fluid-structure interaction. Numer. Heat Transf. Part B Fundam. 2013, 64, 326–349. [Google Scholar] [CrossRef]
- Xiang, T.; Istrati, D.; Yim, S.C.; Buckle, I.G. Tsunami Loads on a Representative Coastal Bridge Deck: Experimental Study and Validation of Design Equations. J. Waterw. Port Coast. Ocean. Eng. 2020, 146, 04020022. [Google Scholar] [CrossRef]
- Westphalen, J.; Greaves, D.M.; Raby, A.; Hu, Z.Z.; Causon, D.M.; Mingham, C.G.; Omidvar, P.; Stansby, P.K.; Rogers, B.D. Investigation of wave-structure interaction using state of the art CFD techniques. Open J. Fluid Dyn. 2014, 4, 18. Available online: https://www.scirp.org/journal/paperinformation.aspx?paperid=43397 (accessed on 20 December 2022). [CrossRef] [Green Version]
- Hasanpour, A.; Istrati, D.; Buckle, I. Coupled SPH–FEM Modeling of Tsunami-Borne Large Debris Flow and Impact on Coastal Structures. J. Mar. Sci. Eng. 2021, 9, 1068. [Google Scholar] [CrossRef]
- Lin, S.M. Energy dissipation and dynamic response of an AM-AFM subjected to a tip-sample viscous force. Ultramicroscopy 2007, 107, 245–253. [Google Scholar] [CrossRef] [PubMed]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, S.-M.; Utama, D.W.; Liauh, C.-T. Coupled Translational–Rotational Stability Analysis of a Submersible Ocean Current Converter Platform Mooring System under Typhoon Wave. J. Mar. Sci. Eng. 2023, 11, 518. https://doi.org/10.3390/jmse11030518
Lin S-M, Utama DW, Liauh C-T. Coupled Translational–Rotational Stability Analysis of a Submersible Ocean Current Converter Platform Mooring System under Typhoon Wave. Journal of Marine Science and Engineering. 2023; 11(3):518. https://doi.org/10.3390/jmse11030518
Chicago/Turabian StyleLin, Shueei-Muh, Didi Widya Utama, and Chihng-Tsung Liauh. 2023. "Coupled Translational–Rotational Stability Analysis of a Submersible Ocean Current Converter Platform Mooring System under Typhoon Wave" Journal of Marine Science and Engineering 11, no. 3: 518. https://doi.org/10.3390/jmse11030518