

Improved Fatigue Reliability Analysis of Deepwater Risers Based on RSM and DBN

Abstract
:1. Introduction
2. Methodology
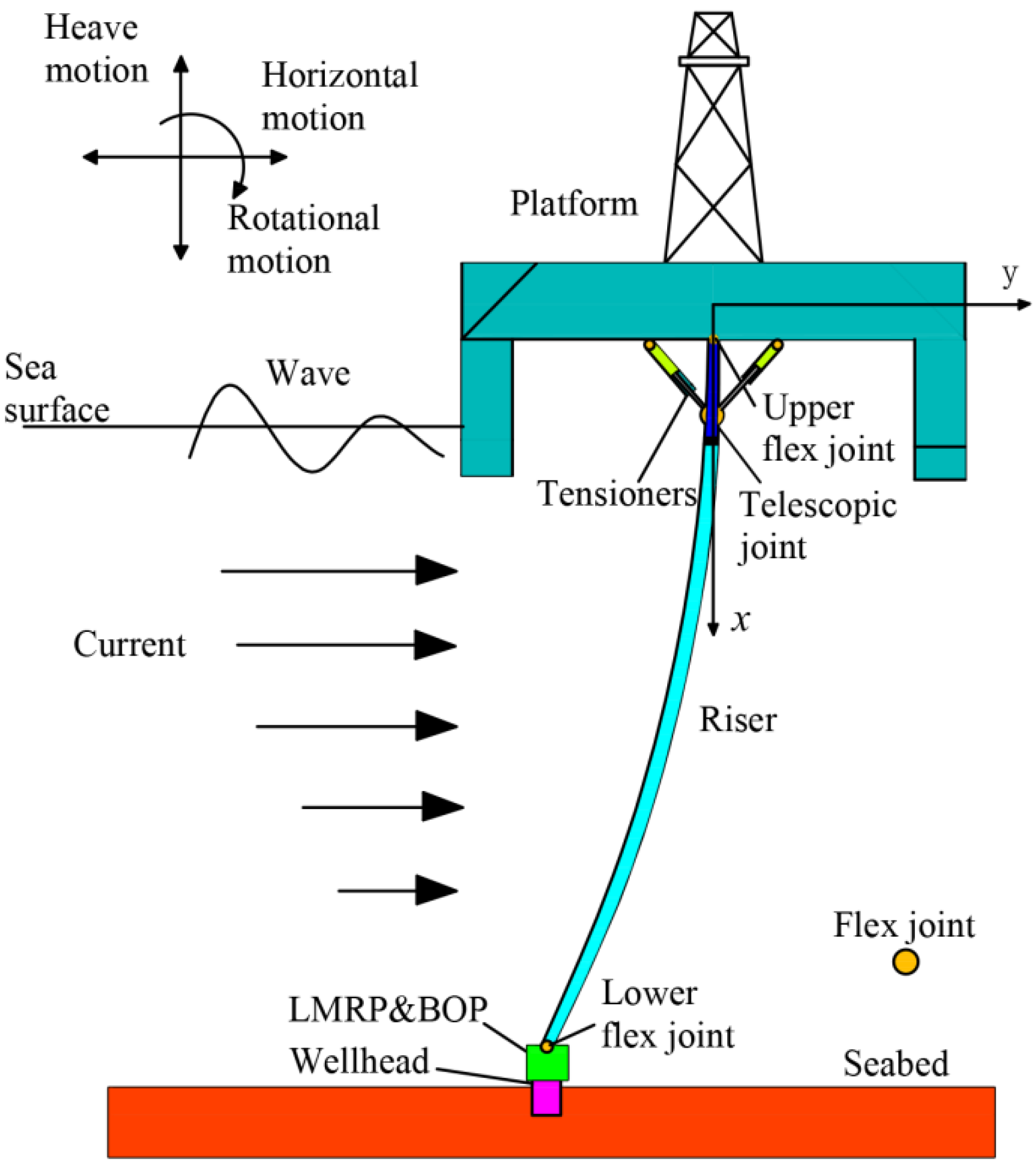
3. Physical-Based Models
4. Data-Driven Models
4.1. RSM
4.2. Fatigue Crack Growth Modeling
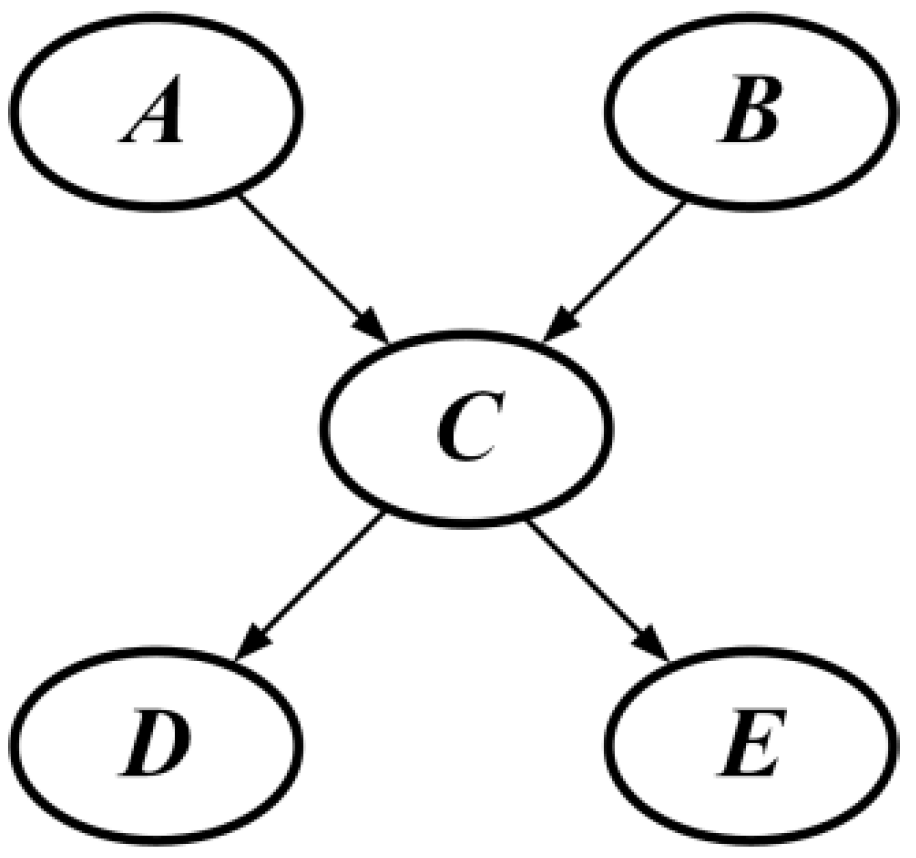
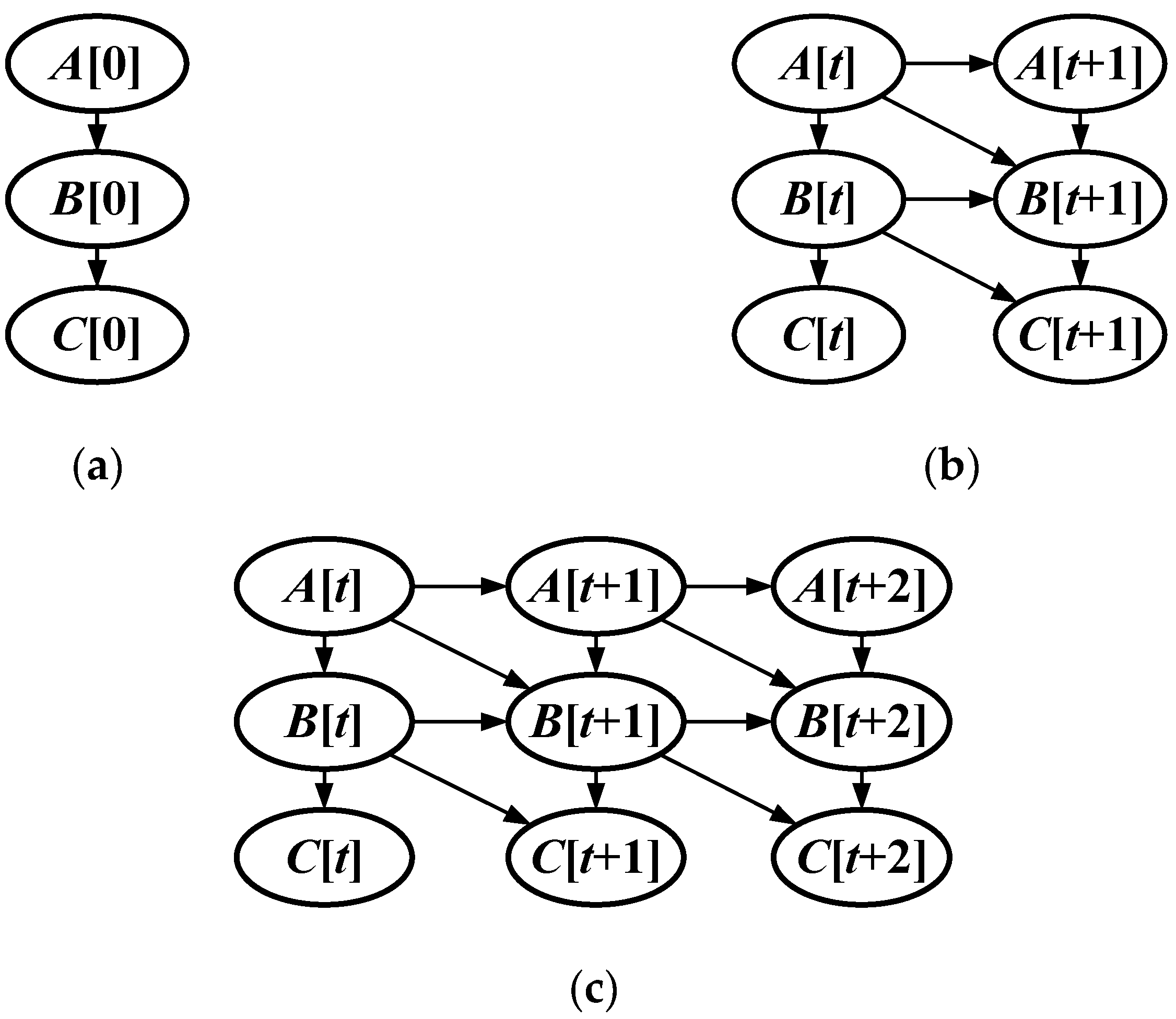
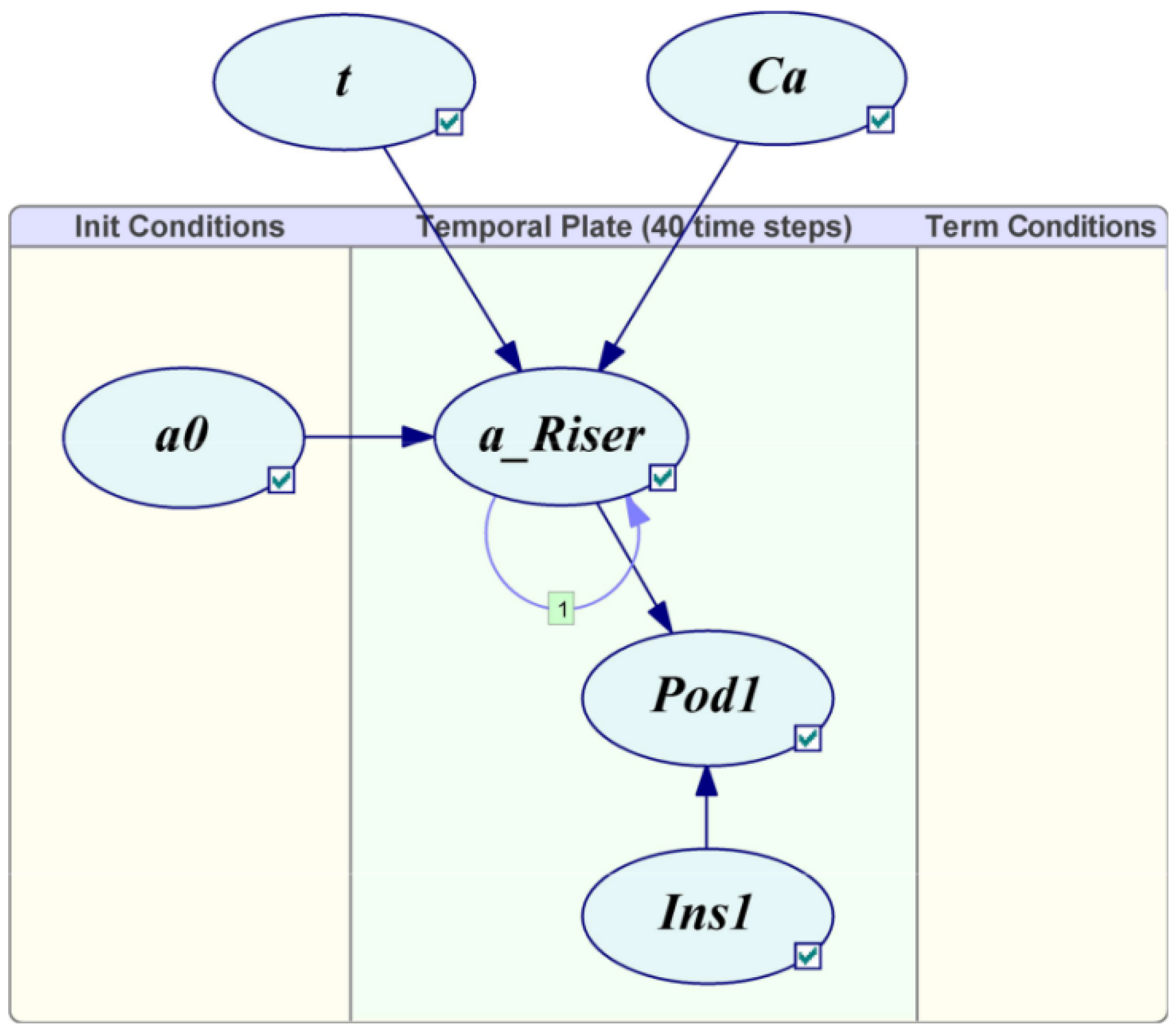
5. Dynamic Bayesian Network
- The conditional probability is uniformly stable for all variable t over a finite period of time.
- The DBN is a Markov process. Future probabilities are determined by present probabilities and not by past probabilities, namely, P(Y[t+1]|Y[1],Y[2],…,Y[t]) = P(Y[t+1]|Y[t]).
- The conditional probability of adjacent time slices is stable. P(Y[t+1]|Y[t]) is independent of time.
6. Case Analysis
6.1. Response Surface Analysis
6.2. Fatigue Reliability Analysis
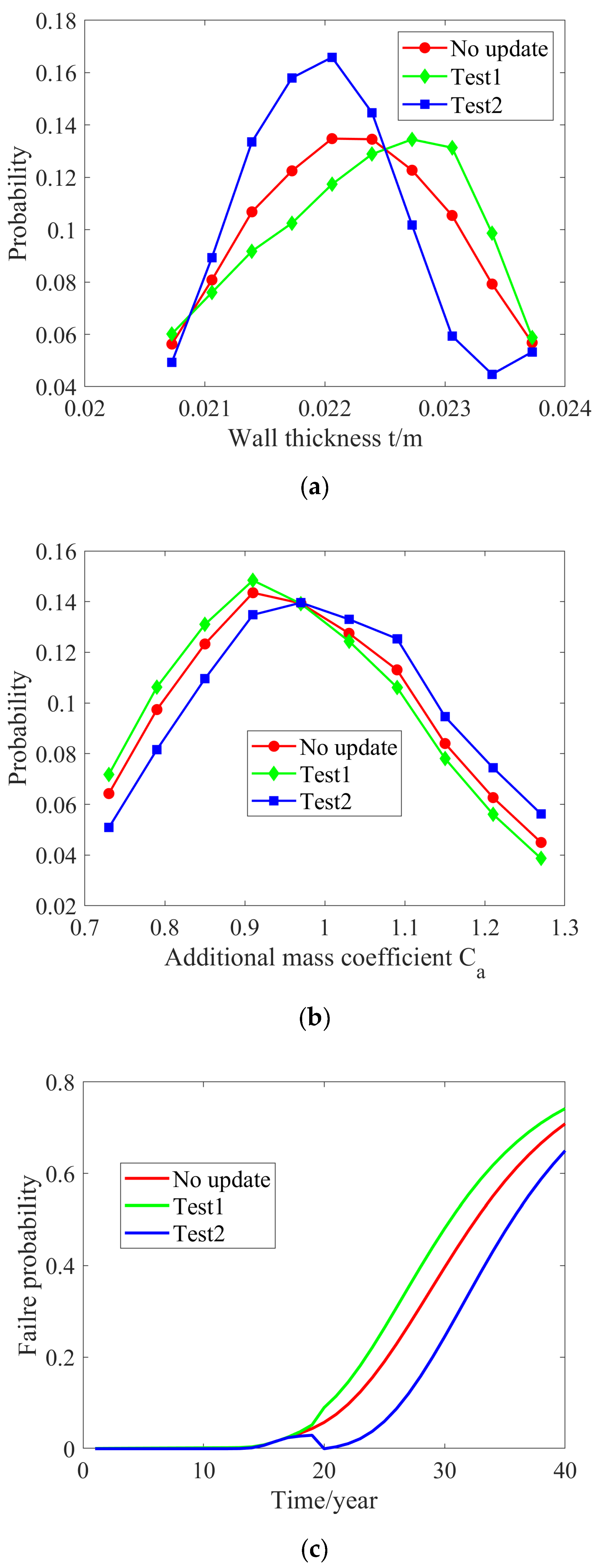
6.3. Fatigue Reliability Updating
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- ISO 13624-1; Petroleum and Natural Gas Industries—Drilling and Production Equipment—Part 1: Design and Operation of Marine Drilling Riser Equipment. International Organization for Standardization: Geneva, Switzerland, 2009.
- Hejazi, R.; Grime, A.; Randolph, M.; Efthymiou, M. An efficient probabilistic framework for the long-term fatigue assessment of large diameter steel risers. Appl. Ocean Res. 2021, 118, 102941. [Google Scholar] [CrossRef]
- Chang, Y.; Wu, X.; Zhang, C.; Chen, G.; Liu, X.; Li, J.; Cai, B.; Xu, L. Dynamic Bayesian networks based approach for risk analysis of subsea wellhead fatigue failure during service life. Reliab. Eng. Syst. Saf. 2019, 188, 454–462. [Google Scholar] [CrossRef]
- U.S. Department of the Interior, Minerals Management Service. Deepwater Riser Design, Fatigue Life and Standards Study Report; Doc. No. 86330-20-R-RP-005; U.S. Department of the Interior, Minerals Management Service: Washington, DC, USA, 2007.
- Low, Y.M.; Narakorn, S. VIV fatigue reliability analysis of marine risers with uncertainties in the wake oscillator model. Eng. Struct. 2016, 106, 96–108. [Google Scholar] [CrossRef] [Green Version]
- Chen, R.; Low, Y.M. Efficient long-term fatigue analysis of deepwater risers in the time domain including wave directionality. Mar. Struct. 2021, 78, 103002. [Google Scholar] [CrossRef]
- Cortina, J.P.R.; Fernando, J.M.; Sagrilo, V.S. Neural networks applied to the wave-Induced fatigue analysis of steel risers. Math. Probl. Eng. 2018, 2018, 2719682. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, X.; Chang, Y. Wave-loading fatigue analysis on deep-water drilling platform/riser system. J. Ship Mech. 2019, 23, 843–850. [Google Scholar]
- Khan, R.A.; Ahmad, S. Dynamic response and fatigue reliability analysis of marine riser under random loads. In Proceedings of the ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007. [Google Scholar]
- Dong, Y.; Kong, X.; An, G.; Kang, J. Fatigue reliability of single-sided girth welds in offshore pipelines and risers accounting for non-destructive inspection. Mar. Struct. 2022, 86, 103268. [Google Scholar] [CrossRef]
- Sen, T.K. Probability of fatigue failure in steel catenary risers in deep water. J. Eng. Mech. 2006, 32, 1001–1006. [Google Scholar] [CrossRef]
- Akpan, U.O.; Koko, T.S.; Rushton, P.A. Probabilistic fatigue reliability of large diameter steel catenary risers (SCR) for ultra-deepwater operations. In Proceedings of the ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007. [Google Scholar]
- Morooka, C.; Stefane, W.; Matt, C.G.C. An assessment for structural reliability of offshore risers due to probability of fatigue failure. In Proceedings of the 8th International Pipeline Conference, Calgary, AB, Canada, 27 September–1 October 2010. [Google Scholar]
- Khan, R.A.; Ahmad, S. Probabilistic fatigue safety analysis of oil and gas risers under random loads. In Proceedings of the ASME 2010 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, 6–11 June 2010. [Google Scholar]
- Yang, H.; Li, H. Fatigue reliability analysis of marine risers by approximation model. In Proceedings of the Twentieth 2010 International Offshore and Polar Engineering Conference, Beijing, China, 20–25 June 2010. [Google Scholar]
- Singh, M.; Ahmad, S. Probabilistic analysis and risk assessment of deepwater composite production riser against fatigue limit state. In Proceedings of the ASME 2015 34th International Conference on Offshore Mechanics and Arctic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Khan, R.A.; Ahmad, S. Nonlinear dynamic and bilinear fatigue reliability analyses of marine risers in deep offshore fields. Ship Offshore Struct. 2018, 13, 10–19. [Google Scholar] [CrossRef]
- Chagas, B.L.B.; Morooka, C.K. A study on the main parameters that affects the reliability of fatigue failure in marine drilling riser. In Proceedings of the ASME 2021 40th International Conference on Offshore Mechanics and Arctic Engineering, Virtual, 21–30 June 2021. [Google Scholar]
- Li, F.; Low, Y.M. Sensitivity study of critical parameters influencing the uncertainty of fatigue damage in steel catenary risers. In Proceedings of the ASME 2010 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, 6–11 June 2010. [Google Scholar]
- Li, F.; Low, Y.M. Fatigue reliability analysis of a steel catenary riser at the touchdown point incorporating soil model uncertainties. Appl. Ocean Res. 2012, 38, 100–110. [Google Scholar] [CrossRef]
- Elosta, H.; Huang, S.; Incecik, A. Wave loading fatigue reliability and uncertainty analyses for geotechnical pipeline models. Ship Offshore Struct. 2014, 9, 450–463. [Google Scholar] [CrossRef]
- Yang, P.; Li, J.; Zhang, W.; Wu, D.; Gu, X.; Ma, Q. Analysis on statistical uncertainties of wave loads and structural fatigue reliability for a semi-submersible platform. Ocean Eng. 2021, 237, 109609. [Google Scholar] [CrossRef]
- Xia, J.; Das, P.K. Probabilistic fatigue reliability analysis of deepwater steel catenary risers. In Proceedings of the ASME 2008 27th International Conference on Offshore Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008. [Google Scholar]
- Lim, H.; Manuel, L.; Low, Y.M.; Srinil, N. A surrogate model for estimating uncertainty in marine riser fatigue damage resulting from vortex-induced vibration. Eng. Struct. 2022, 254, 113796. [Google Scholar] [CrossRef]
- Hejazi, R.; Grime, A.; Randolph, M.; Efthymiou, M. A Bayesian machine learning approach to rapidly quantifying the fatigue probability of failure for steel catenary risers. Ocean Eng. 2021, 235, 109353. [Google Scholar] [CrossRef]
- Nazir, M.; Khan, F.; Amyotte, P. Fatigue reliability analysis of deep water rigid marine risers associated with morison-type wave loading. Stoch. Environ. Res. Risk Assess. 2008, 22, 379–390. [Google Scholar] [CrossRef]
- Monsalve-Giraldo, J.S.; Videiro, P.M.; Mendes de Sousa, F.J.; dos Santos, C.M.P.M.; Sagrilo, L.V.S. Parametric interpolation method for probabilistic fatigue analysis of steel risers. Appl. Ocean Res. 2019, 90, 101838. [Google Scholar] [CrossRef]
- Dong, Y.; Teixeira, A.P.; Guedes Soares, C. Time-variant fatigue reliability assessment of welded joints based on the PHI2 and response surface methods. Reliab. Eng. Syst. Saf. 2018, 177, 120–130. [Google Scholar] [CrossRef]
- Su, Y.; Fu, G.; Wan, B.; Yu, T.; Zhou, W.; Wang, X. Fatigue reliability design for metal dual inline packages under random vibration based on response surface method. Microelectron. Reliab. 2019, 100–101, 113404. [Google Scholar] [CrossRef]
- Zhang, Z.; Qiu, Z. Fatigue reliability analysis for structures with hybrid uncertainties combining quadratic response surface and polynomial chaos expansion. Int. J. Fatigue 2021, 144, 106071. [Google Scholar] [CrossRef]
- Cai, B.; Liu, Y.; Zhang, Y.; Fan, Q.; Liu, Z.; Tian, X. A dynamic Bayesian networks modeling of human factors on offshore. J. Loss Prev. Process Ind. 2013, 26, 639–649. [Google Scholar] [CrossRef]
- Liu, X.; Sun, H.; Yu, M. Mechanical analysis of deepwater drilling riser system based on multibody system dynamics. Pet. Sci. 2021, 18, 603–617. [Google Scholar] [CrossRef]
- Xu, L.; Wang, J.; Li, Y. Development and sea trial investigation for deepwater drilling riser specialized soft hang-off system during transit. Ocean Eng. 2022, 243, 110310. [Google Scholar] [CrossRef]
- Liu, X.; Li, Y.; Zhang, N. Improved axial dynamic analysis of risers based on finite element method and data-driven models. Ocean Eng. 2020, 214, 107782. [Google Scholar] [CrossRef]
- Tian, D.; Fan, H.; Leira, B.J.; Sævik, S. Study on the static behavior of installing a deep-water drilling riser on a production platform. J. Pet. Sci. Eng. 2020, 185, 106652. [Google Scholar] [CrossRef]
- Sexton, R.M.; Agbezuge, L.K. Random wave and vessel motion effects on drilling riser dynamics. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 2–5 May 1976. [Google Scholar]
- Zhang, W.; Gao, D. Research on the dynamic behavior of riser in deepwater drilling under the condition of disconnection mode. Pet. Drill. Tech. 2010, 38, 7–9. [Google Scholar]
- Wang, Y.; Gao, D.; Fang, J. Axial dynamic analysis of marine riser in installation. J. Nat. Gas Sci. Eng. 2014, 21, 112–117. [Google Scholar] [CrossRef]
- Paris, P.; Erdogan, F. A critical analysis of crack propagation laws. J. Basic Eng. 1963, 85, 528–533. [Google Scholar] [CrossRef]
- Liu, W.; Chen, G. Coupling analysis for vibration and fatigue of a cracked cantilever beam. J. Vib. Shock 2011, 30, 140–144. [Google Scholar]
- Tada, H.; Paris, P.; Irwin, G.R. The Stress Analysis of Cracks Handbook, 3rd ed.; ASME Press: New York, NY, USA, 2000. [Google Scholar]
- BS 7910: 2005; Guide to Methods for Assessing the Acceptability of Flaws in Metallic Structures. British Standards Institution: Britain, UK, 2005.
- Chang, Y.; Chen, G.; Wu, X.; Ye, J.; Chen, B.; Xu, L. Failure probability analysis for emergency disconnect of deepwater drilling riser using Bayesian network. J. Loss Prev. Process Ind. 2018, 51, 42–53. [Google Scholar] [CrossRef]
- Cooper, G.F. The computational complexity of probabilistic inference using bayesian belief networks. Artif. Intell. 1990, 42, 393–405. [Google Scholar] [CrossRef]
- Xiao, Q.; Gao, S.; Gao, X. Learning Theory and Application of Dynamic Bayesian Network Reasoning, 1st ed.; National Defense Industry Press: Beijing, China, 2007. [Google Scholar]
- Wang, Y.; Liu, S.; Chen, Z.; Wang, M.; Yang, J.; Chen, X. Dynamic Bayesian networks for reliability evaluation of subsea wellhead connector during service life based on Monte Carlo method. J. Loss Prev. Process Ind. 2021, 71, 104487. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, Y. A Bayesian network based method for reliability analysis of subsea blowout preventer control system. J. Loss Prev. Process Ind. 2019, 59, 44–53. [Google Scholar] [CrossRef]
- Leira, B.J.; Lgland, R.T.; Ye, N. Fatigue safety factors for the tensile and pressure armours of flexible risers. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007. [Google Scholar]
- Gui, J.; Kang, H. Response surface method for structural reliability analysis and its implementation with MATLAB. Chin. J. Comput. Mech. 2003, 21, 683–687. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Length of each deepwater riser | 22.86 m |
| Length of deepwater riser system | 1531.62 m |
| Riser outer diameter | 0.5334 m |
| Wall thickness | 22.225 mm |
| Top tension | 6 MN |
| Element number of single riser | 20 |
| Time step size | 0.02 |
| Sea condition number | 1 | 2 | 3 | 4 | 5 | 6 |
| Wave height (m) | 1.23 | 2.58 | 3.91 | 4.95 | 5.95 | 6.53 |
| Wave period (s) | 3.5 | 4.5 | 5.5 | 6.5 | 7 | 7.5 |
| Probability of occurrence (%) | 3.99 | 13.48 | 38.32 | 32.56 | 10.64 | 1.01 |
| Parameters | Distribution | Mean (μ) | COV |
|---|---|---|---|
| Wall thickness t | Normal | 22.225 mm | 0.05 |
| Additional mass coefficient Ca | Lognormal | 1 | 0.05 |
| S–N curve coefficient C | Lognormal | 1.023 × 1012 | 0.05 |
| Drag force coefficient Cd | Normal | 1 | 0.05 |
| Variable number | 1 | 2 | 3 | 4 | 5 |
| Wall thickness t (mm) | 22.225 | 20.558 | 20.558 | 23.892 | 23.892 |
| Additional mass coefficient Ca | 1 | 0.925 | 1.075 | 0.925 | 1.075 |
| Fatigue damage | 0.002476 | 0.003056 | 0.003839 | 0.001683 | 0.002266 |
| Variable number | 1 | 2 | 3 | 4 | 5 |
| Wall thickness t (mm) | 22.225 | 21.114 | 21.114 | 23.336 | 23.336 |
| Additional mass coefficient Ca | 1 | 0.95 | 1.05 | 0.95 | 1.05 |
| Data-driven models | 0.002454 | 0.002824 | 0.003274 | 0.001842 | 0.002292 |
| Physical-based models | 0.002476 | 0.002735 | 0.003298 | 0.001909 | 0.002363 |
| Relative error | 0.1222% | 4.391% | 1.588% | 2.714% | 1.003% |
| Variable | Distribution | Mean | COV |
|---|---|---|---|
| S–N curve parameter C | Constant | 1.023 × 1012 | - |
| Fracture mechanics parameter m | Constant | 3 | - |
| Fracture mechanics parameter C0 | Constant | 2.3 × 10−12 | - |
| Crack depth a0 | Normal | 1 mm | 0.1 |
| Additional mass coefficient Ca | Log-normal | 1 | 0.2 |
| Wall thickness t | Normal | 22.225 mm | 0.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Hu, P.; Li, Y.; Qiu, N.; Chen, G.; Liu, X. Improved Fatigue Reliability Analysis of Deepwater Risers Based on RSM and DBN. J. Mar. Sci. Eng. 2023, 11, 688. https://doi.org/10.3390/jmse11040688
Xu L, Hu P, Li Y, Qiu N, Chen G, Liu X. Improved Fatigue Reliability Analysis of Deepwater Risers Based on RSM and DBN. Journal of Marine Science and Engineering. 2023; 11(4):688. https://doi.org/10.3390/jmse11040688
Chicago/Turabian StyleXu, Liangbin, Pengji Hu, Yanwei Li, Na Qiu, Guoming Chen, and Xiuquan Liu. 2023. "Improved Fatigue Reliability Analysis of Deepwater Risers Based on RSM and DBN" Journal of Marine Science and Engineering 11, no. 4: 688. https://doi.org/10.3390/jmse11040688
APA StyleXu, L., Hu, P., Li, Y., Qiu, N., Chen, G., & Liu, X. (2023). Improved Fatigue Reliability Analysis of Deepwater Risers Based on RSM and DBN. Journal of Marine Science and Engineering, 11(4), 688. https://doi.org/10.3390/jmse11040688