
Predictive Control of a Heaving Compensation System Based on Machine Learning Prediction Algorithm


Abstract
:1. Introduction
2. Control Strategy of the Heave Compensation System
2.1. Heave Compensation Model
2.2. Prediction Methodology
2.2.1. BPNN
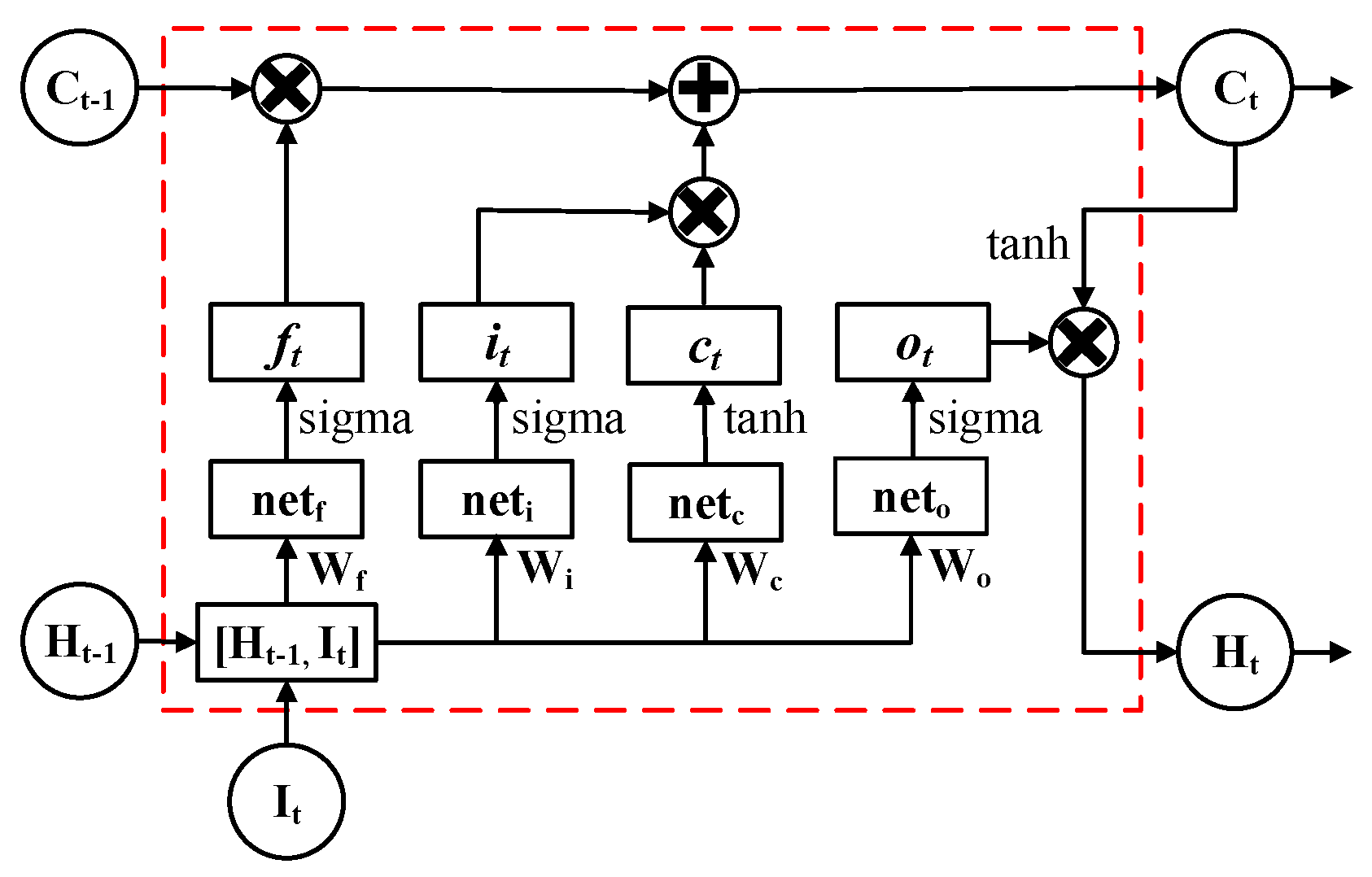
2.2.2. LSTM RNN
2.3. Predictive PID Control
2.4. Data Processing
3. Predictive Feedforward Control under Regular Structure Motion
3.1. Actual-Data Feedforward Control
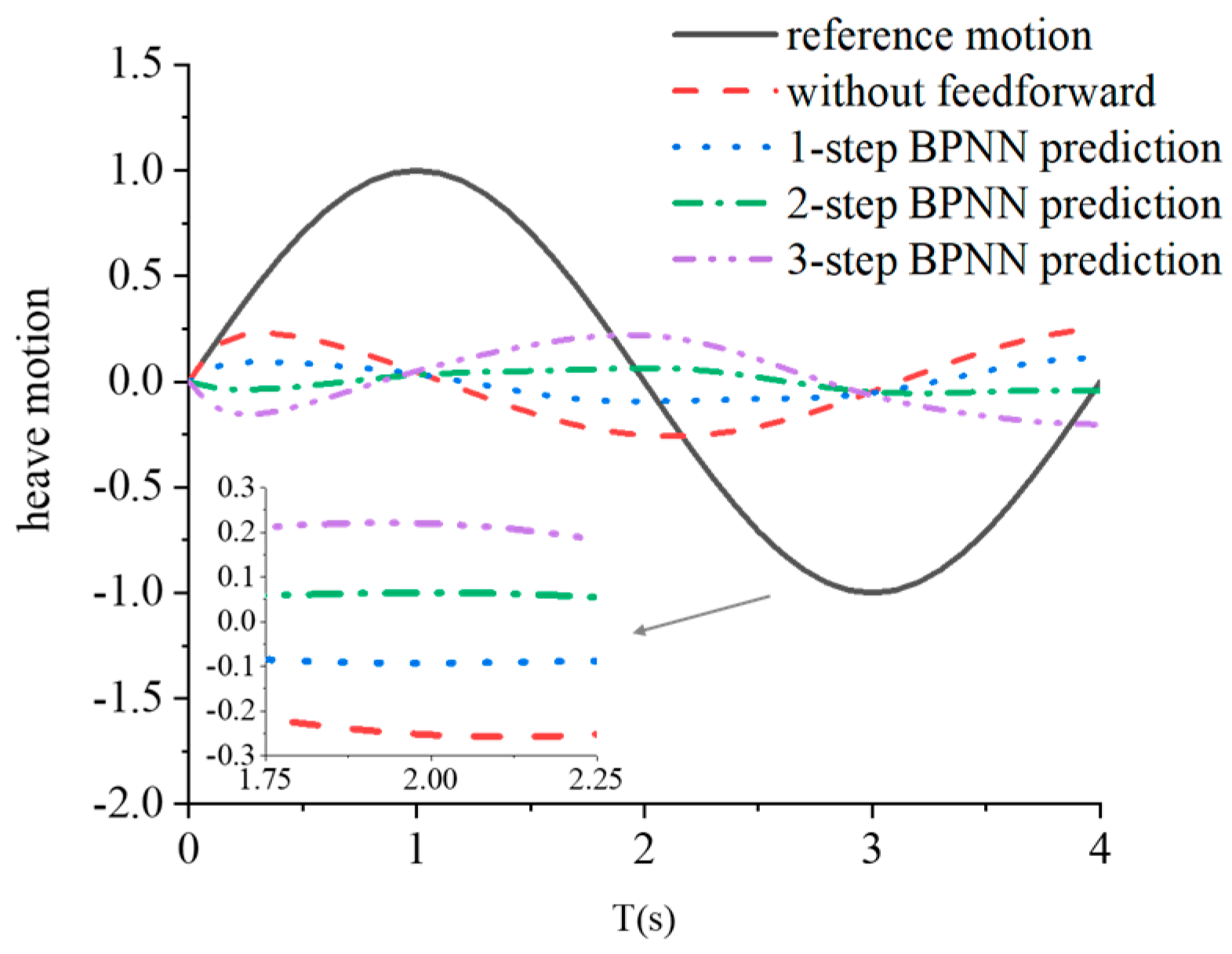
3.2. BPNN Feedforward Control
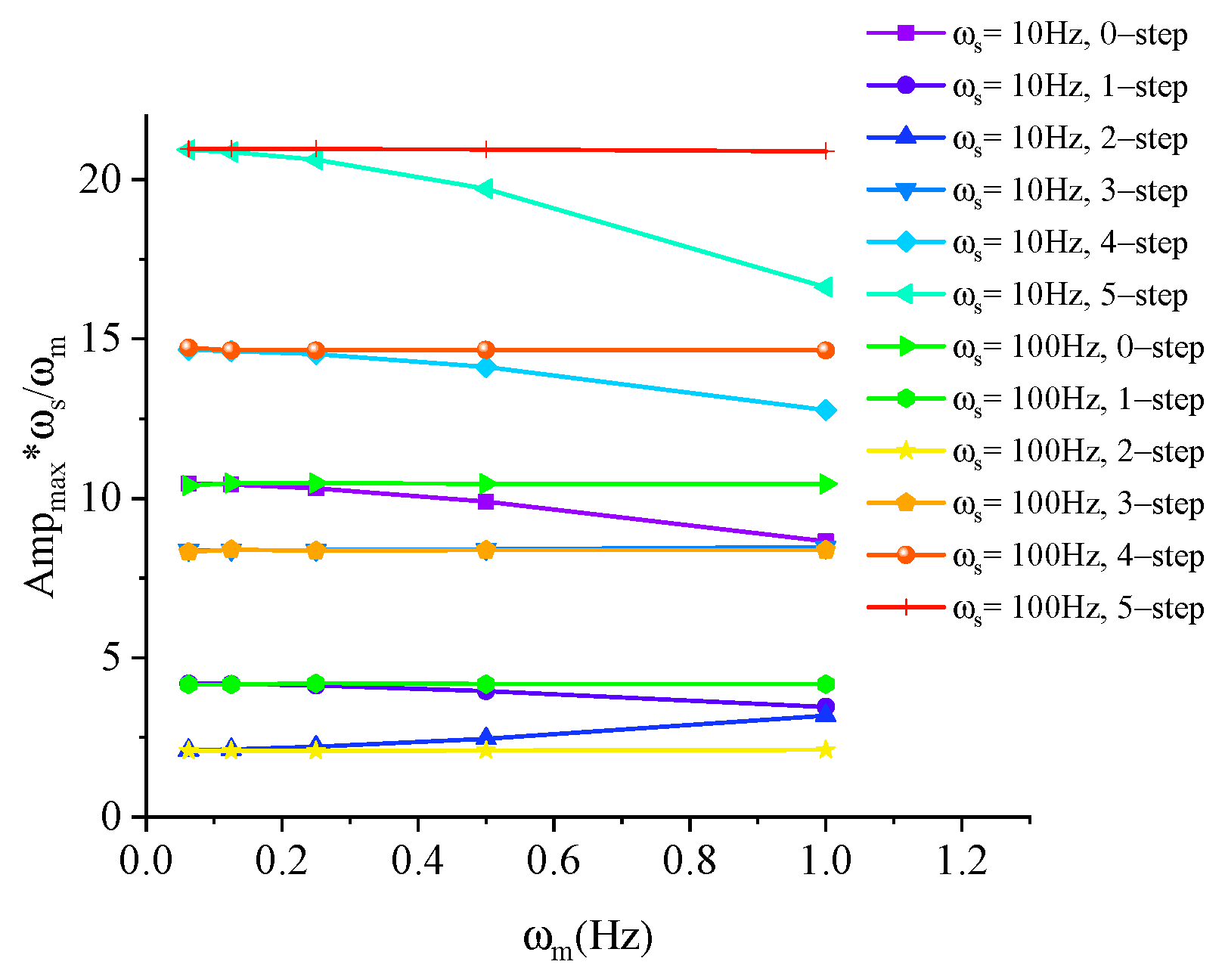
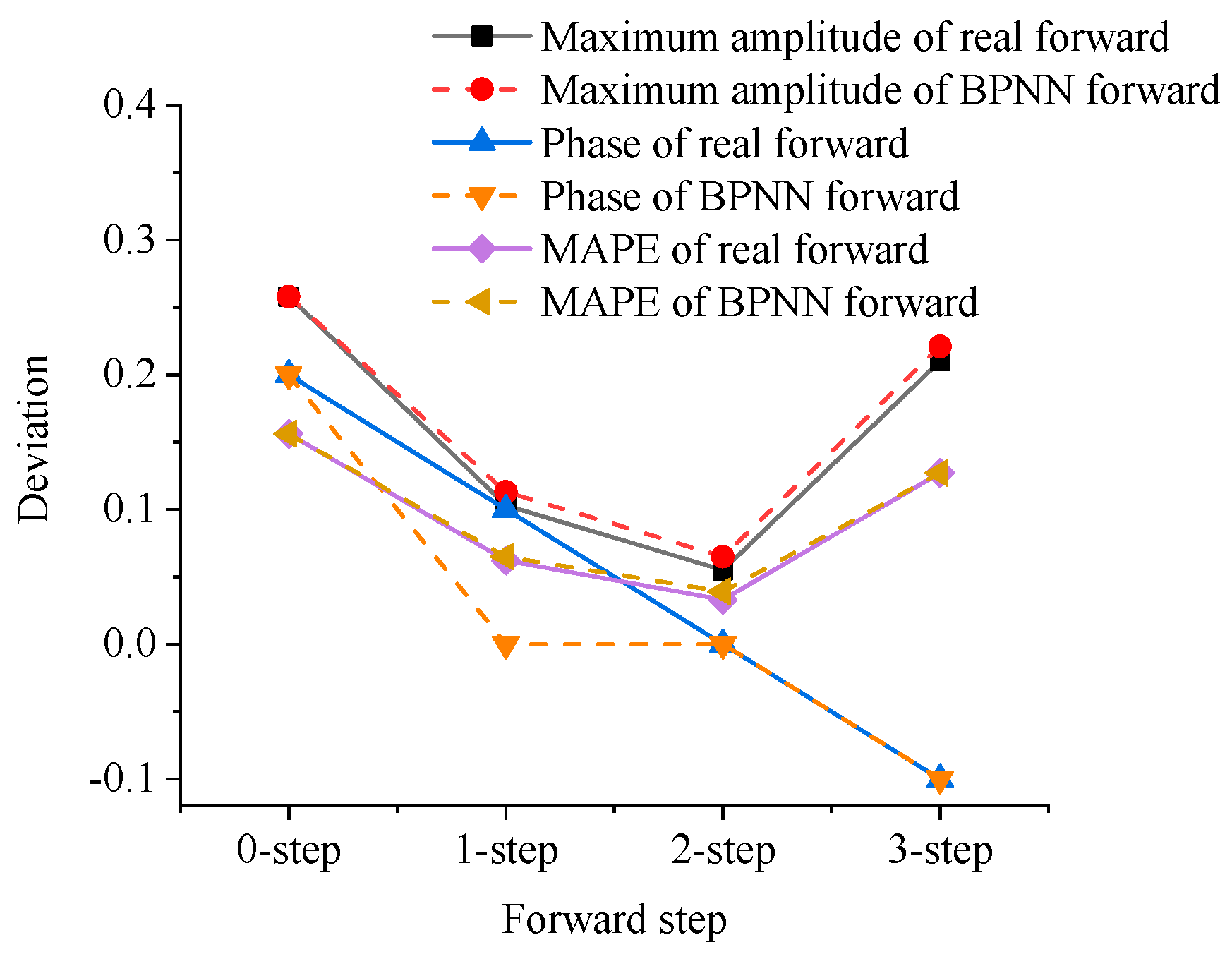
3.3. Analysis of Optimal Forward Steps
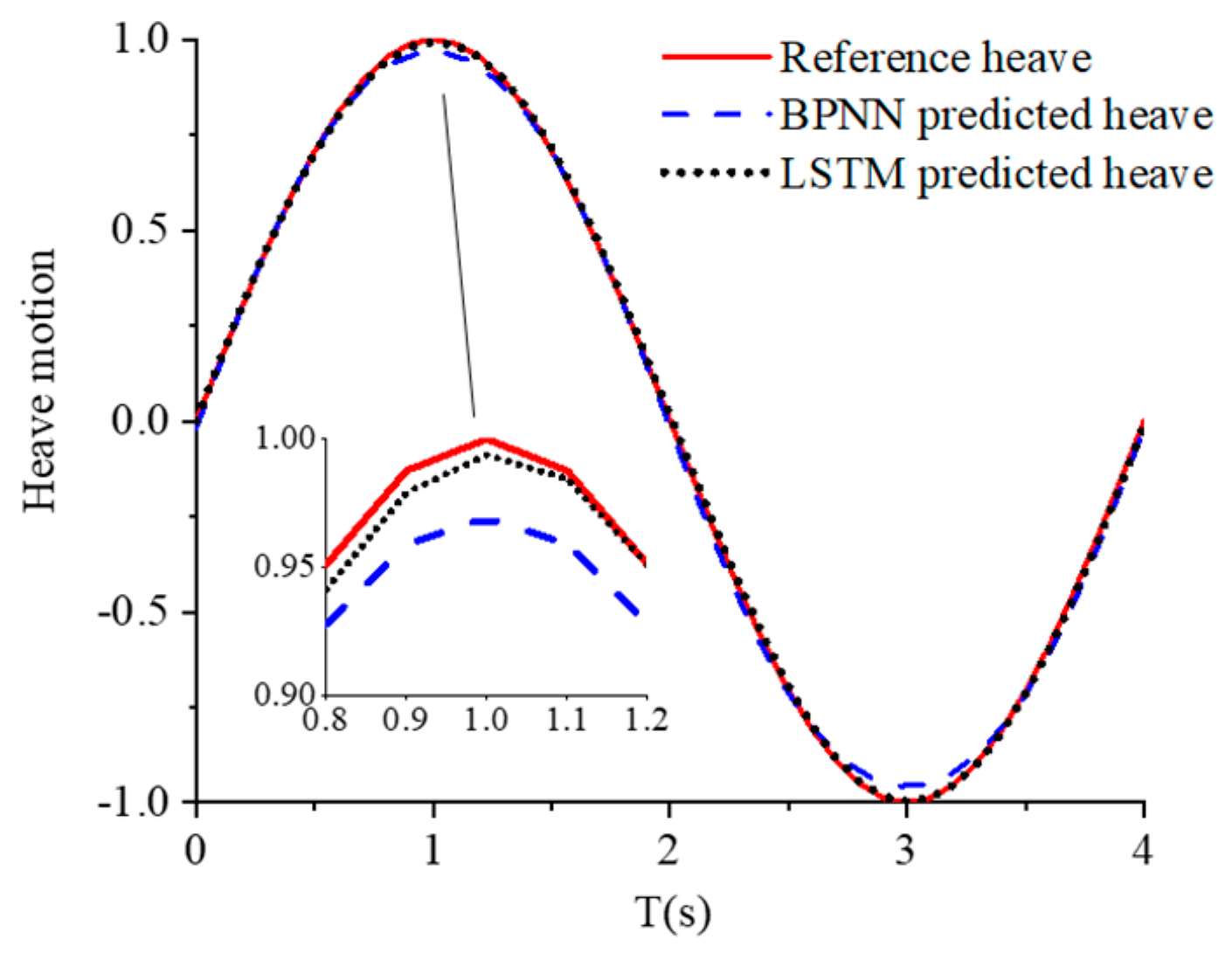
4. Predictive Feedforward Control under Irregular Structure Motion
5. Conclusions
- (1)
- For the regular structure motion case, the BPNN algorithm has the advantage of low computational cost. The computational cost of the compensation system with actual-data feedforward control is reduced to 5.5% of the value for reference motion and 6.5% of the value for machine learning predicted motion. Thus, machine learning-based predictive control is reliable for use in active heave compensation systems.
- (2)
- Comparison of the performance under different sampling and motion frequencies shows that two-step feedforward control is the optimal prediction horizon for the predictive control strategy for the current problem in the paper. The amplitude of payload motion is proportional to the structure motion frequency and inversely proportional to the sampling frequency. The phase deviation is insensitive to the structure motion frequency and sampling frequency.
- (3)
- In the irregular structure motion case, the LSTM RNN algorithm performs better than BPNN. The amplitude of payload motion is compensated to 2.9% of the reference motion via two-step feedforward control. The compensation effect of irregular motion is approximate to that of the corresponding dominant frequency.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ning, X.; Zhao, J.; Xu, J. The heave motion estimation for active heave compensation system in offshore crane. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 1327–1332. [Google Scholar]
- Richter, M.; Schaut, S.; Walser, D.; Schneider, K.; Sawodny, O. Experimental validation of an active heave compensation system: Estimation, prediction and control. Control Eng. Pract. 2017, 66, 1–12. [Google Scholar] [CrossRef]
- Ren, Z.; Skjetne, R.; Verma, A.; Jiang, Z.; Gao, Z.; Halse, K. Active heave compensation of floating wind turbine installation using a catamaran construction vessel. Mar. Struct. 2021, 75, 102868. [Google Scholar] [CrossRef]
- Zhou, H.; Cao, J.; Yao, B.; Lian, L. Hierarchical NMPC–ISMC of active heave motion compensation system for TMS–ROV recovery. Ocean. Eng. 2021, 239, 109834. [Google Scholar] [CrossRef]
- Woodacre, J.; Bauer, R.; Irani, R. A review of vertical motion heave compensation systems. Ocean Eng. 2015, 104, 140–154. [Google Scholar] [CrossRef]
- Küchler, S.; Mahl, T.; Neupert, J.; Schneider, K.; Sawodny, O. Active control for an offshore crane using prediction of the vessel’s motion. IEEE/ASME Trans. Mechatron. 2010, 16, 297–309. [Google Scholar] [CrossRef]
- Neupert, J.; Mahl, T.; Haessig, B.; Sawodny, O.; Schneider, K. A heave compensation approach for offshore cranes. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 538–543. [Google Scholar]
- Hatleskog, J.; Dunnigan, M. Heave Compensation Simulation for Non-Contact Operations in Deep Water. In Proceedings of the Heave Compensation Simulation for Non-Contact Operations in Deep Water, Boston, MA, USA, 18–21 September 2006; pp. 1–6. [Google Scholar]
- Küchler, S.; Eberharter, J.K.; Langer, K.; Schneider, K.; Sawodny, O. Heave motion estimation of a vessel using acceleration measurements. IFAC Proc. Vol. 2011, 44, 14742–14747. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Lei, D.; Cai, L.; Tang, T.; Wang, Z. Heave compensation prediction based on echo state network with correntropy induced loss function. PLoS ONE 2019, 14, e0217361. [Google Scholar] [CrossRef] [PubMed]
- Shi, B.; Xian, L.; Wu, Q.; Zhang, Y. Active heave compensation prediction research for deep sea homework crane based on KPSO-SVR. In Proceedings of the 33rd Chinese Control Conference, Kunming, China, 22–24 May 2014; pp. 7637–7642. [Google Scholar]
- Ngo, Q.H.; Nguyen, N.P.; Nguyen, C.N.; Tran, T.H.; Ha, Q.P. Fuzzy sliding mode control of an offshore container crane. Ocean Eng. 2017, 140, 125–134. [Google Scholar] [CrossRef] [Green Version]
- Shi, M.; Guo, S.; Jiang, L.; Huang, Z. Active-Passive Combined Control System in Crane Type for Heave Compensation. IEEE Access. 2019, 7, 159960–159970. [Google Scholar] [CrossRef]
- Yang, Y.; Cui, K.; Shi, D.; Mustafa, G.; Wang, J. PID control with PID event triggers: Theoretic analysis and experimental results. Control Eng. Pract. 2022, 128, 105322. [Google Scholar] [CrossRef]
- Feng, H.; Sun, W.; Tang, G.; Wang, J. Study on a novel two-part underwater towed system for near-surface towed vehicle test. Ocean Eng. 2022, 255, 111440. [Google Scholar] [CrossRef]
- Liu, J.; Wang, L. Two-stage vibration-suppression framework for optimal robust placements design and reliable PID gains design via set-crossing theory and artificial neural network. Reliab. Eng. Syst. Saf. 2023, 230, 108956. [Google Scholar] [CrossRef]
- Metzmacher, H.; Syndicus, M.; Warthmann, A.; Treeck, C. Exploratory comparison of control algorithms and machine learning as regulators for a personalized climatization system. Energy Build. 2022, 255, 111653. [Google Scholar] [CrossRef]
- Wang, H.; Ding, Z.; Tang, R.; Chen, Y.; Fan, C.; Wang, J. A machine learning-based control strategy for improved performance of HVAC systems in providing large capacity of frequency regulation service. Appl. Energy 2022, 326, 119962. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Paramesh, S.; Rajendran, S. A unified seakeeping and manoeuvring model with a PID controller for path following of a KVLCC2 tanker in regular waves. Appl. Ocean Res. 2021, 116, 102860. [Google Scholar]
- Zeng, Z.; Chen, G. Multi-step Predictions for Generalized Heave Motion of Wave Compensating Platform Based on ELMAN Neural Network. In Proceedings of the 2009 Third International Symposium on Intelligent Information Technology Application Workshops, NanChang, China, 21–22 November 2009; pp. 460–463. [Google Scholar]
- Guo, X.; Zhang, X.; Tian, X.; Li, X.; Lu, W. Predicting heave and surge motions of a semi-submersible with neural networks. Appl. Ocean Res. 2021, 112, 102708. [Google Scholar] [CrossRef]
- Li, L.; Yuan, Z.; Gao, Y. Maximization of energy absorption for a wave energy converter using the deep machine learning. Energy 2018, 165, 340–349. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Q.; Hu, X.; Lin, J.; Deng, X.; Li, H. A novel short-term blood pressure prediction model based on LSTM. AIP Conf. Proc. 2019, 2058, 020003. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types of Feedforward | Types of Deviation | |||
|---|---|---|---|---|
| Maximum Amplitude | Phase/Step | MAE | RMSE | |
| Without forward | 0.258 | 2 | 0.156 | 0.175 |
| One-step actual-data feedforward | 0.103 | 1 | 0.062 | 0.070 |
| Two-step actual-data feedforward | 0.055 | 0 | 0.033 | 0.038 |
| Three-step actual-data feedforward | 0.210 | −1 | 0.127 | 0.143 |
| One-step BPNN prediction | 0.113 | 0 | 0.065 | 0.072 |
| Two-step BPNN prediction | 0.065 | 0 | 0.039 | 0.043 |
| Three-step BPNN prediction | 0.221 | −1 | 0.127 | 0.143 |
| Motion Frequency (Hz) | 0.0625 | 0.125 | 0.25 | 0.5 | 1 | |
|---|---|---|---|---|---|---|
| Forward step | 0 | 0.065 | 0.130 | 0.258 | 0.495 | 0.866 |
| 1 | 0.026 | 0.052 | 0.103 | 0.198 | 0.346 | |
| 2 | 0.013 | 0.027 | 0.055 | 0.123 | 0.319 | |
| 3 | 0.052 | 0.105 | 0.210 | 0.420 | 0.848 | |
| 4 | 0.092 | 0.183 | 0.363 | 0.706 | 1.277 | |
| 5 | 0.131 | 0.261 | 0.516 | 0.985 | 1.663 | |
| Motion Frequency (Hz) | 0.0625 | 0.125 | 0.25 | 0.5 | 1 | |
|---|---|---|---|---|---|---|
| Forward step | 0 | 2 | 2 | 1 | 2 | 2 |
| 1 | 1 | 1 | 1 | 1 | 1 | |
| 2 | 0 | 0 | 0 | 0 | −1 | |
| 3 | −1 | −1 | −1 | −1 | −2 | |
| 4 | −2 | −2 | −1 | −2 | −3 | |
| 5 | −3 | −3 | −2 | −3 | −4 | |
| Motion Frequency (Hz) | 0.0625 | 0.125 | 0.25 | 0.5 | 1 | |
|---|---|---|---|---|---|---|
| Forward step | 0 | 0.007 | 0.013 | 0.026 | 0.052 | 0.105 |
| 1 | 0.003 | 0.005 | 0.011 | 0.021 | 0.042 | |
| 2 | 0.001 | 0.003 | 0.005 | 0.011 | 0.021 | |
| 3 | 0.005 | 0.011 | 0.021 | 0.042 | 0.084 | |
| 4 | 0.009 | 0.018 | 0.037 | 0.073 | 0.146 | |
| 5 | 0.013 | 0.026 | 0.052 | 0.105 | 0.209 | |
| Motion Frequency (Hz) | 0.0625 | 0.125 | 0.25 | 0.5 | 1 | |
|---|---|---|---|---|---|---|
| Forward step | 0 | 2 | 2 | 2 | 2 | 2 |
| 1 | 1 | 1 | 1 | 1 | 1 | |
| 2 | 0 | 0 | 0 | 0 | 0 | |
| 3 | −1 | −1 | −1 | −1 | −1 | |
| 4 | −2 | −2 | −2 | −2 | −2 | |
| 5 | −3 | −3 | −3 | −3 | −3 | |
| Types of Feedforward | Types of Deviation | ||
|---|---|---|---|
| Maximum Amplitude | MAE | RMSE | |
| Without forward | 0.120 | 0.023 | 0.030 |
| One-step actual-data feedforward | 0.048 | 0.008 | 0.010 |
| Two-step actual-data feedforward | 0.028 | 0.004 | 0.006 |
| One-step BPNN prediction | 0.122 | 0.023 | 0.030 |
| Two-step BPNN prediction | 0.069 | 0.010 | 0.013 |
| One-step LSTM prediction | 0.060 | 0.010 | 0.013 |
| Two-step LSTM prediction | 0.029 | 0.005 | 0.006 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, L.; Zhang, M.; Yuan, Z.-M.; Zheng, H.; Lv, W. Predictive Control of a Heaving Compensation System Based on Machine Learning Prediction Algorithm. J. Mar. Sci. Eng. 2023, 11, 821. https://doi.org/10.3390/jmse11040821
Hu L, Zhang M, Yuan Z-M, Zheng H, Lv W. Predictive Control of a Heaving Compensation System Based on Machine Learning Prediction Algorithm. Journal of Marine Science and Engineering. 2023; 11(4):821. https://doi.org/10.3390/jmse11040821
Chicago/Turabian StyleHu, Lifen, Ming Zhang, Zhi-Ming Yuan, Hongxia Zheng, and Wenbin Lv. 2023. "Predictive Control of a Heaving Compensation System Based on Machine Learning Prediction Algorithm" Journal of Marine Science and Engineering 11, no. 4: 821. https://doi.org/10.3390/jmse11040821
APA StyleHu, L., Zhang, M., Yuan, Z.-M., Zheng, H., & Lv, W. (2023). Predictive Control of a Heaving Compensation System Based on Machine Learning Prediction Algorithm. Journal of Marine Science and Engineering, 11(4), 821. https://doi.org/10.3390/jmse11040821