

A New Coastal Crawler Prototype to Expand the Ecological Monitoring Radius of OBSEA Cabled Observatory

 , , , ,
, , , ,  , , ,
, , ,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
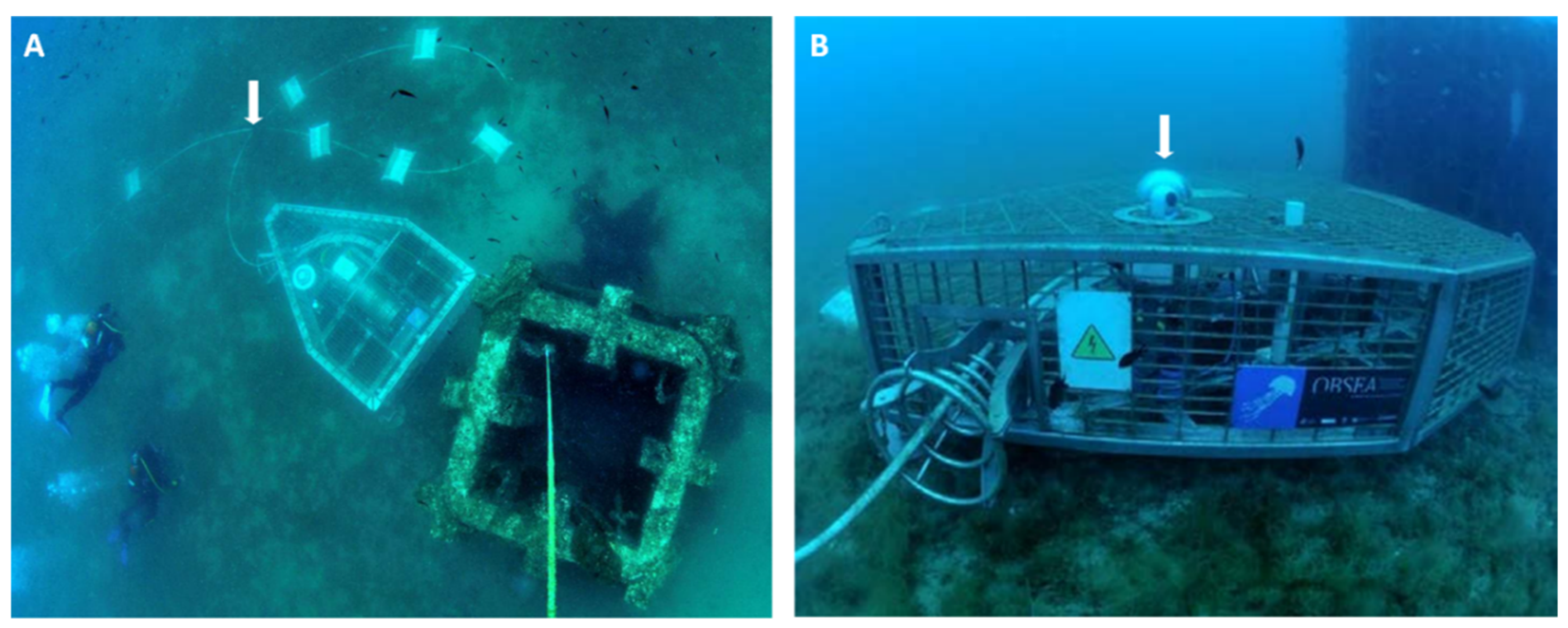
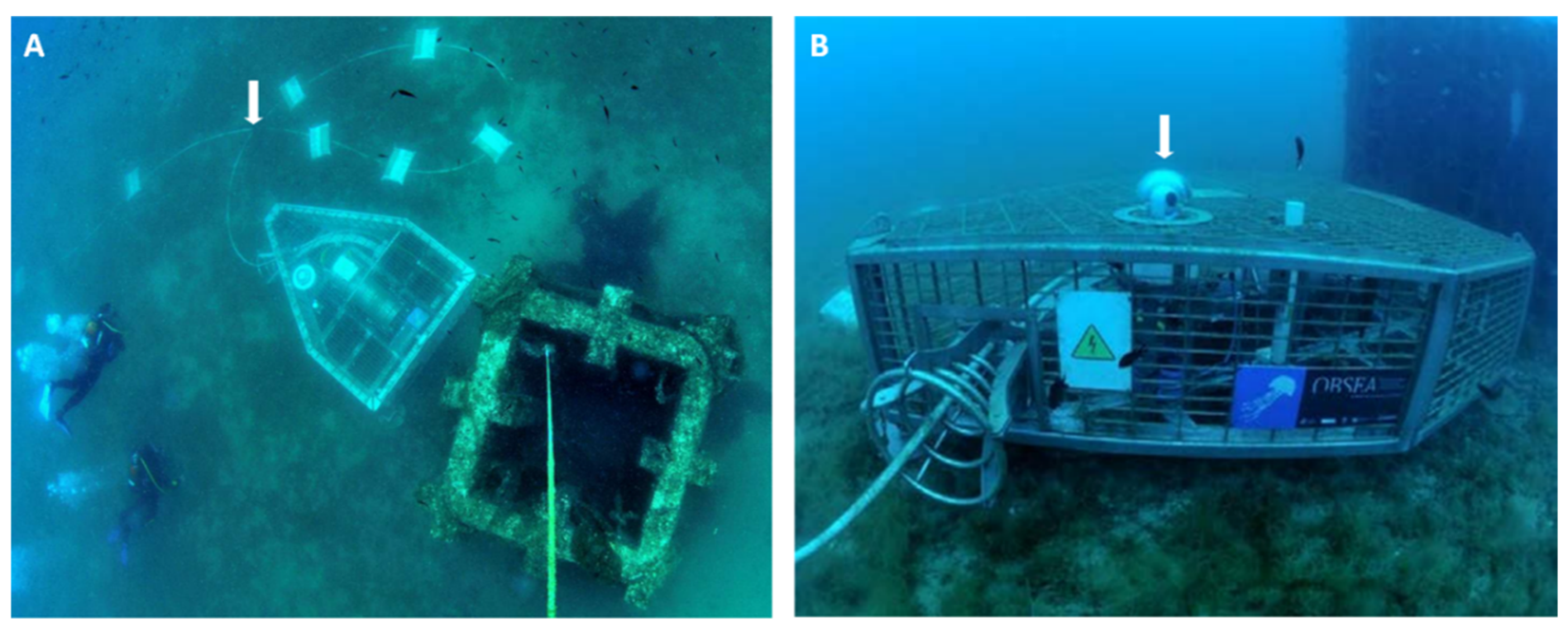
2.1. The OBSEA Test-Site as Operational Context for the Crawler Development
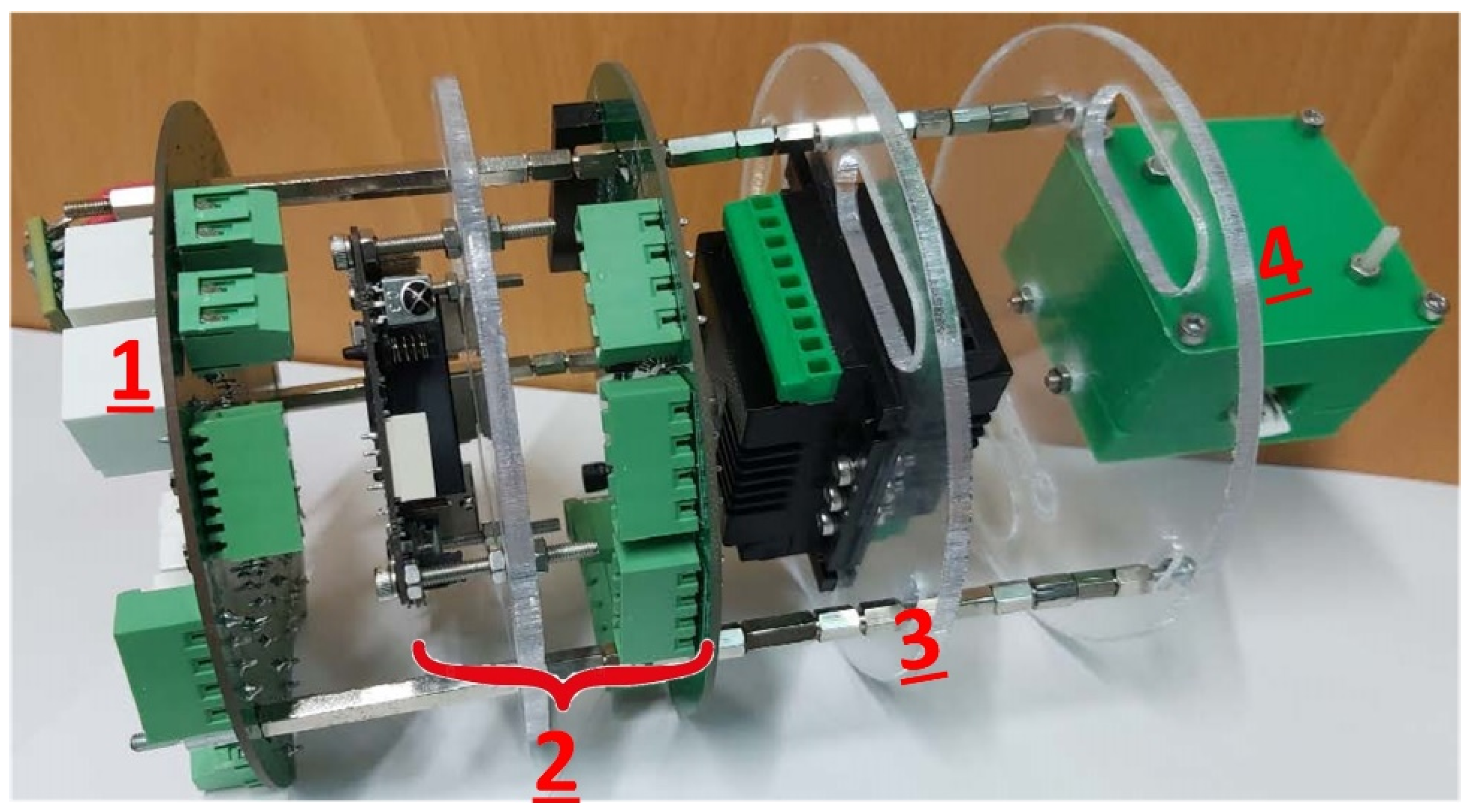
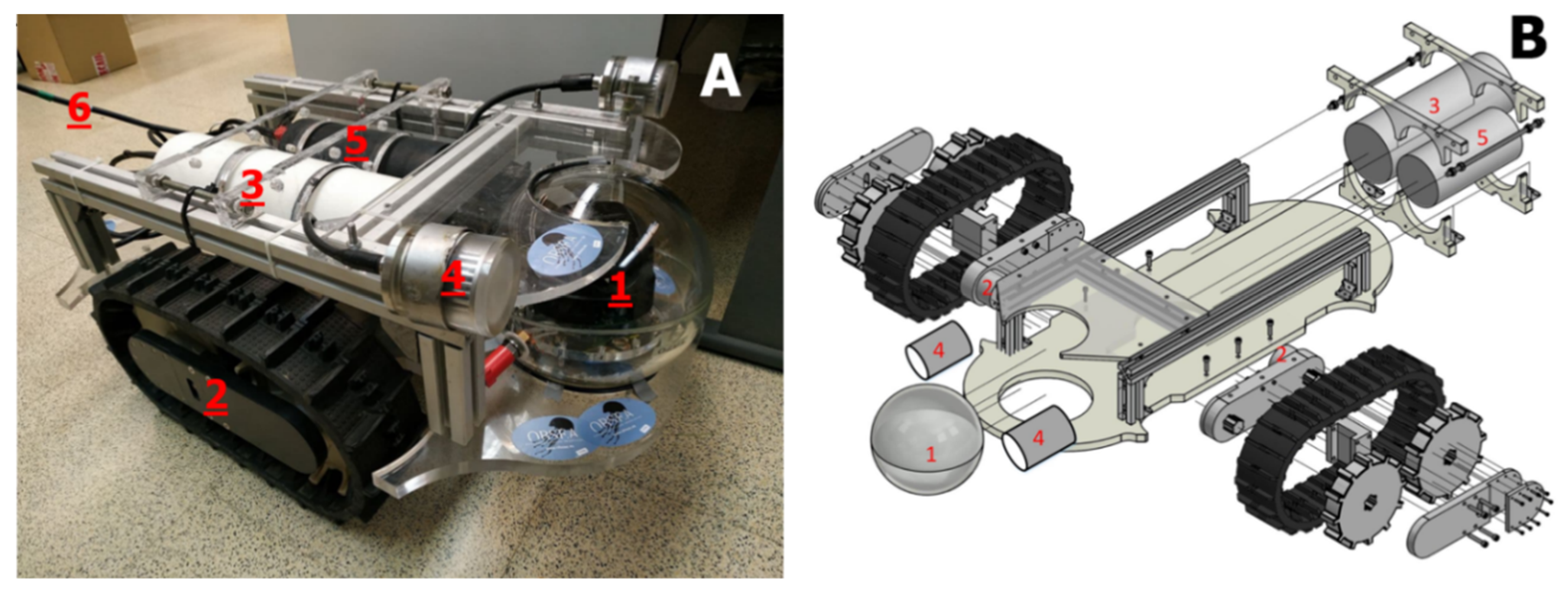
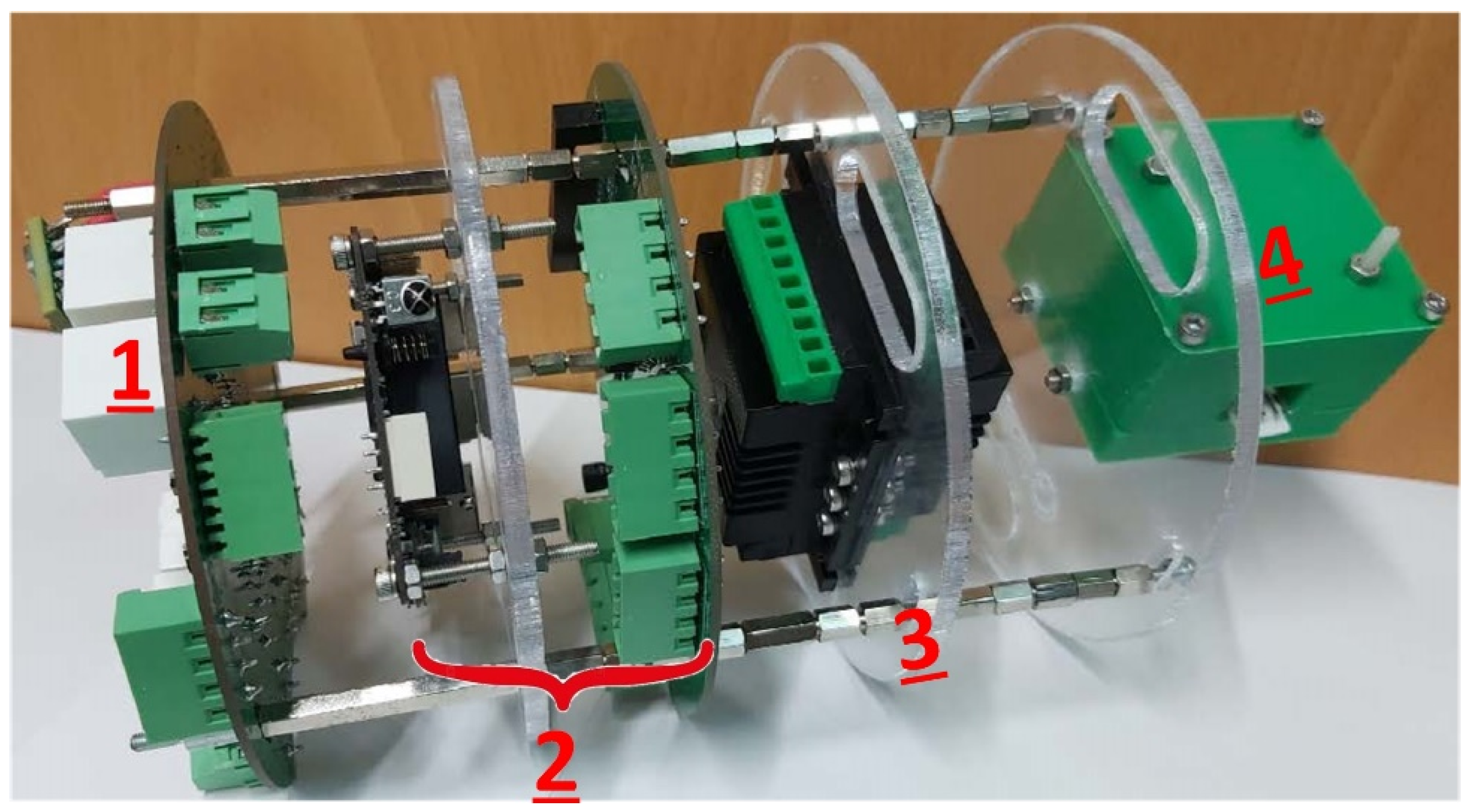
2.2. The Crawler Components and Assemblage
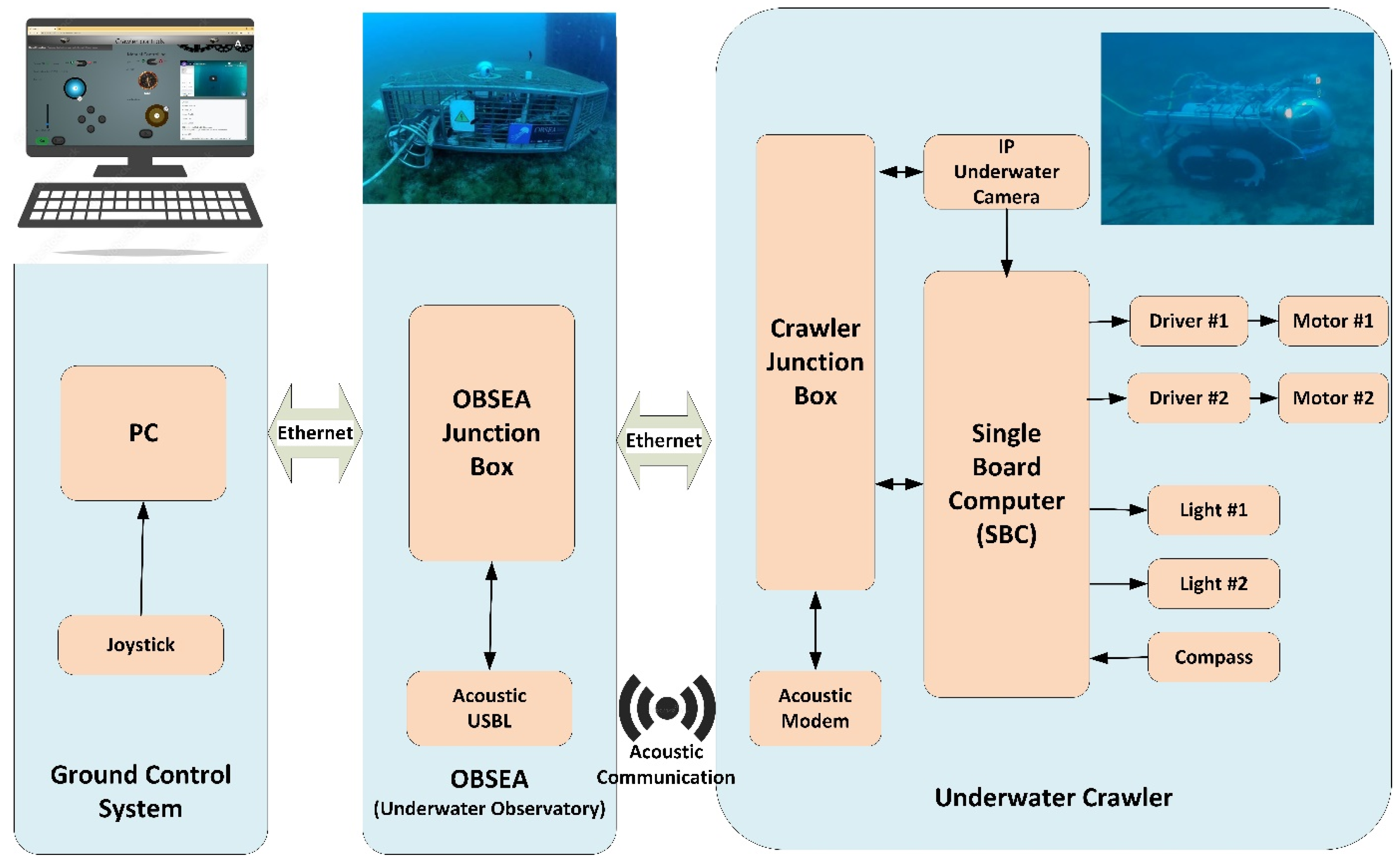
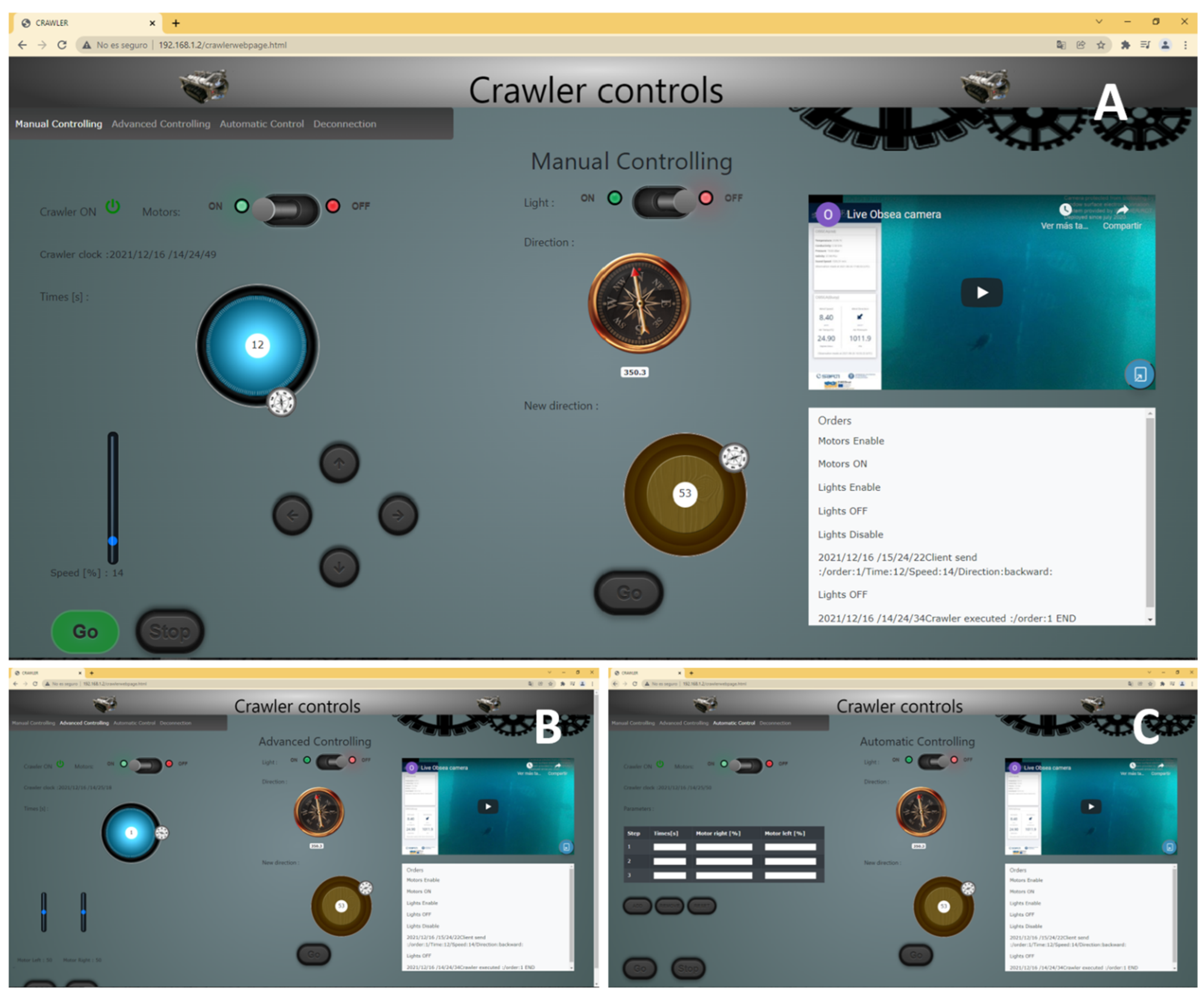
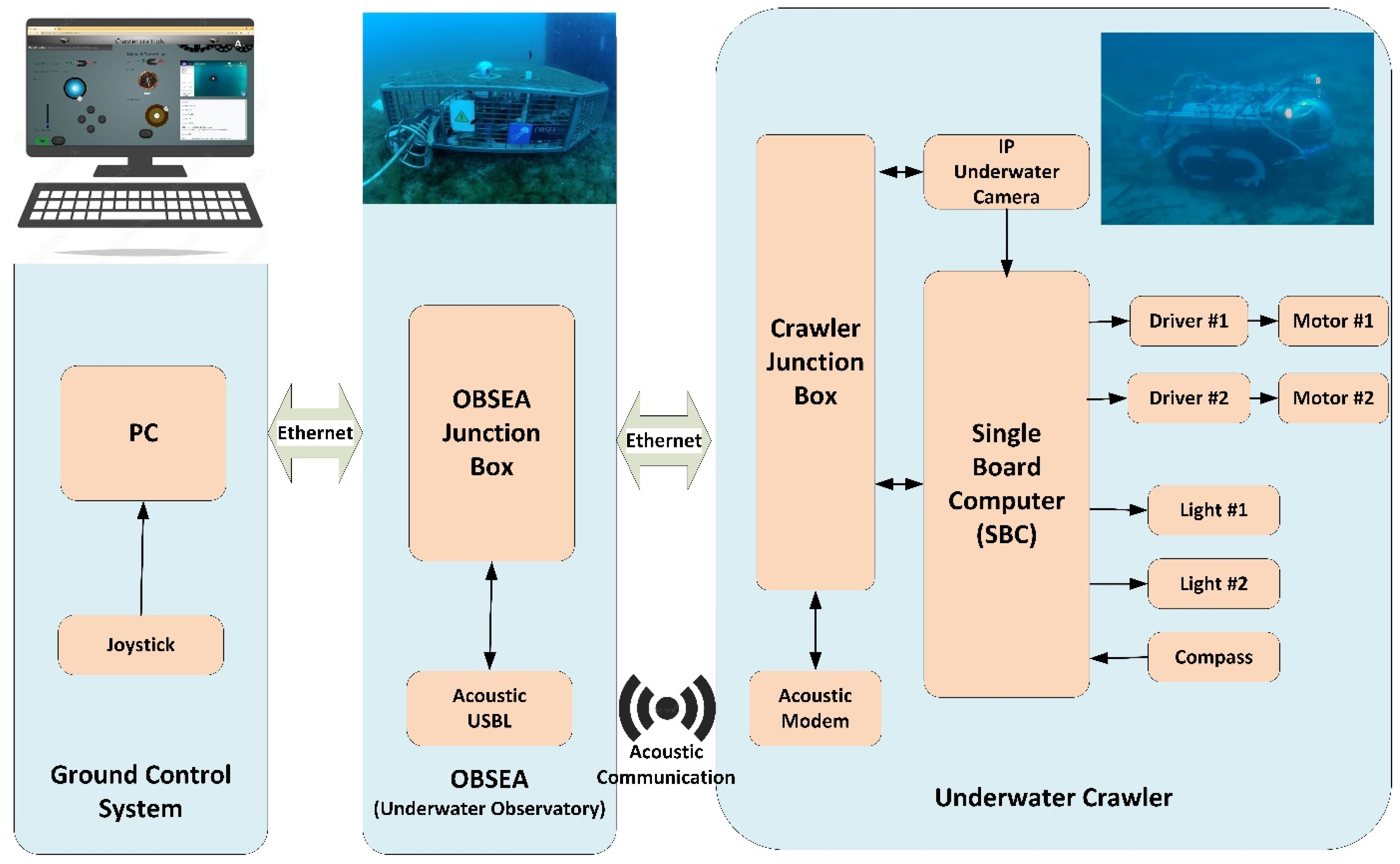
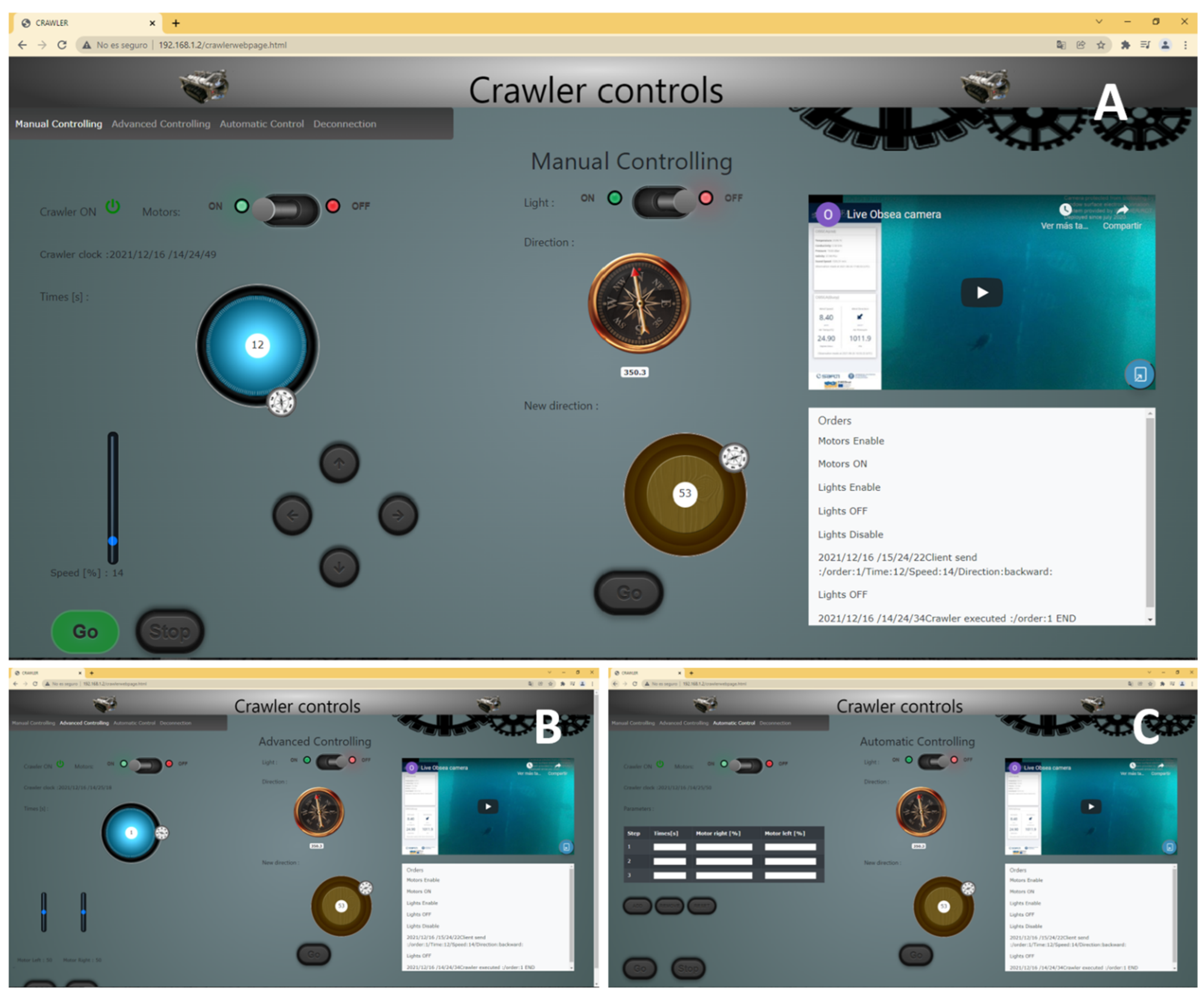
2.3. The Web Architecture for the Crawler Control and the Management of Acquired Video-Data
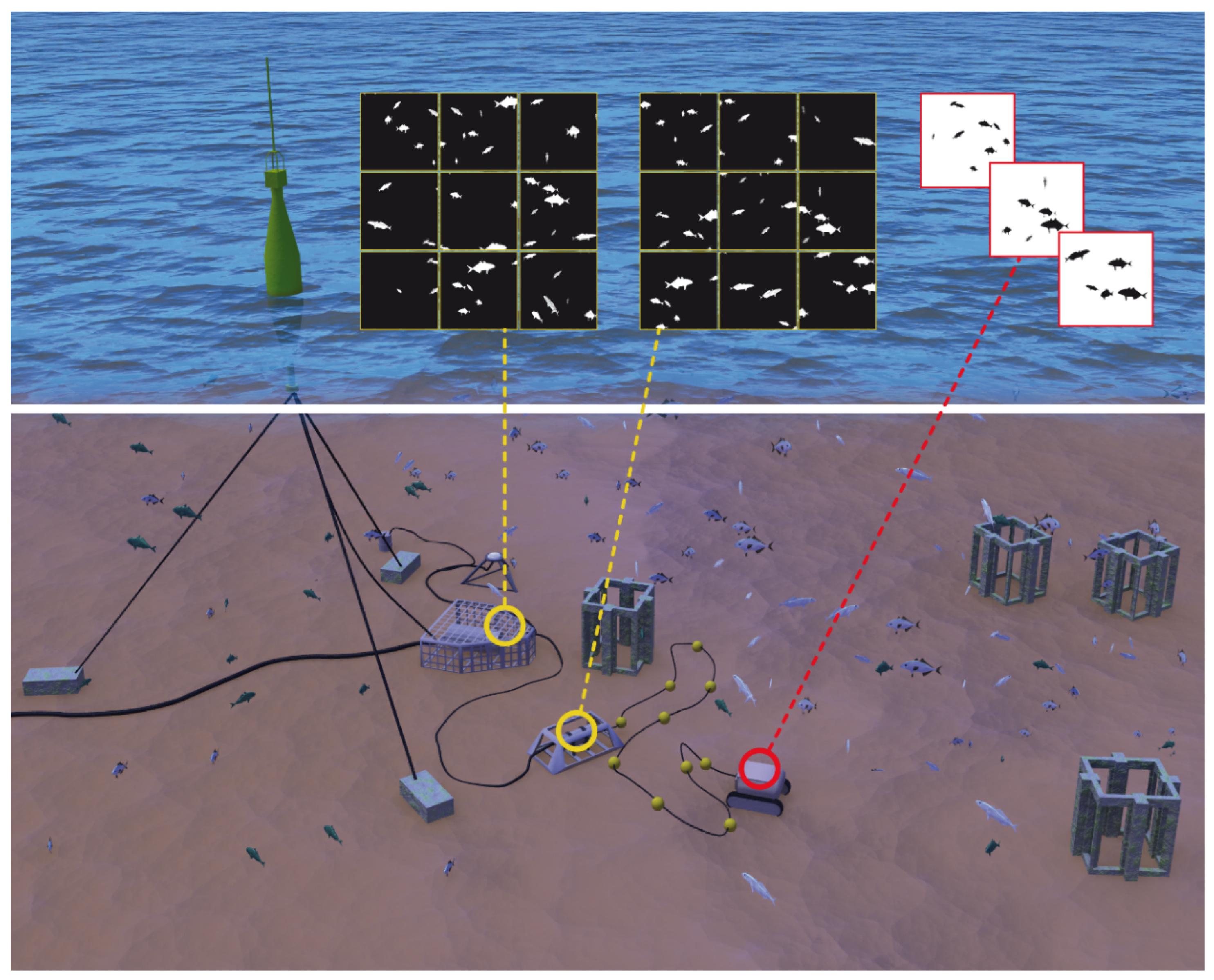
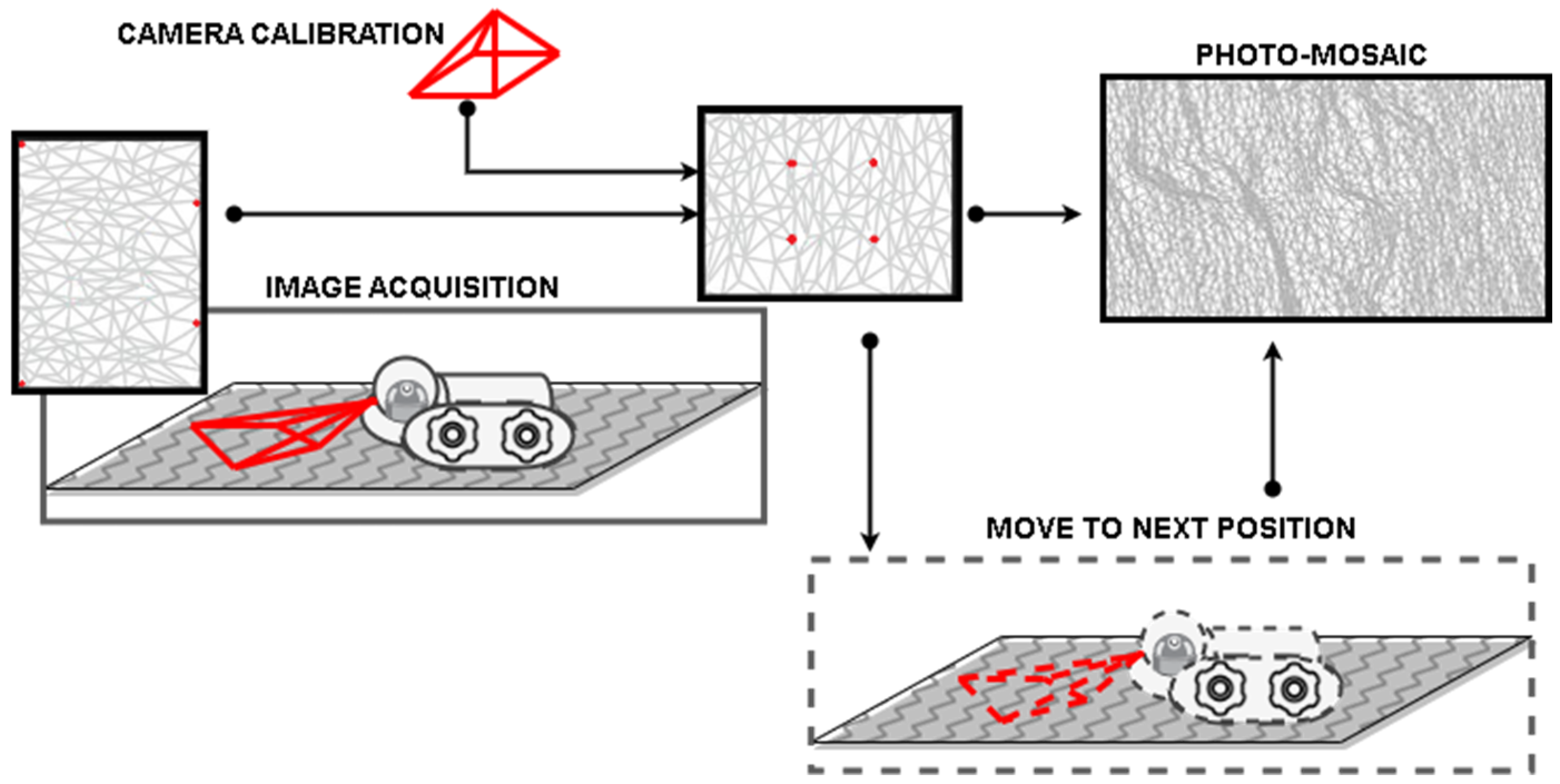
2.4. Image Acquisition for Automated Photo-Mosaics
2.4.1. Camera Movement
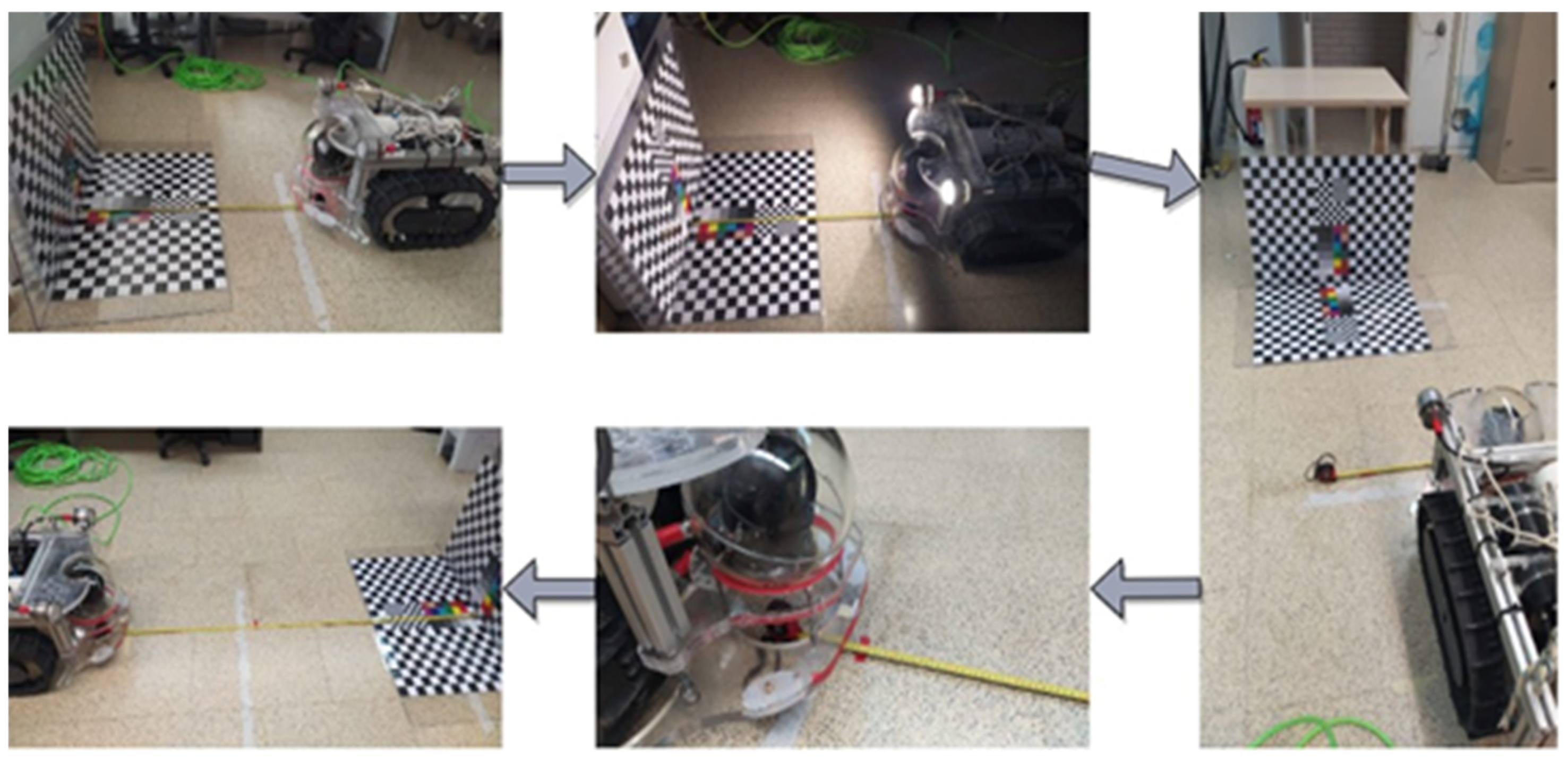
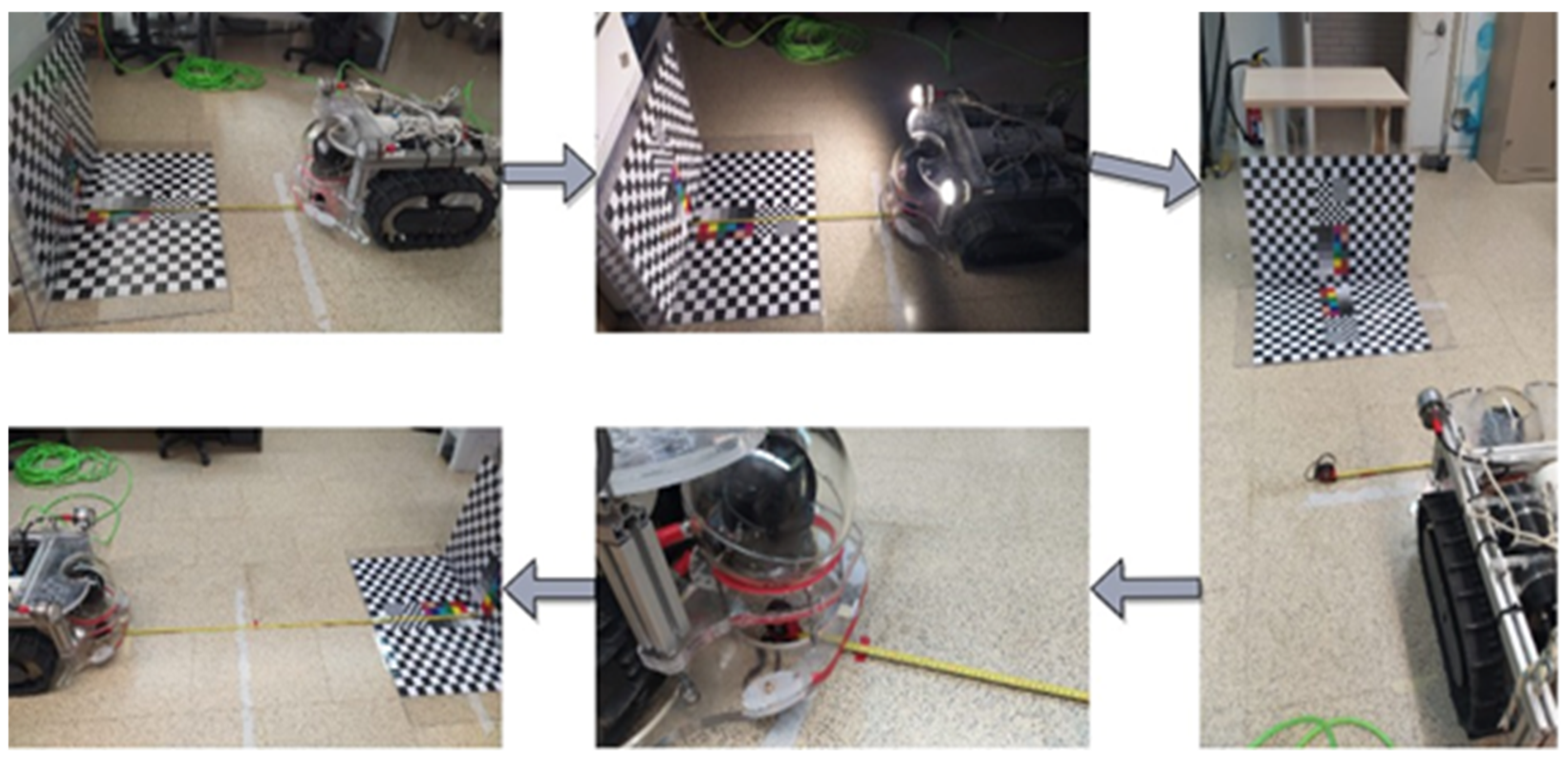
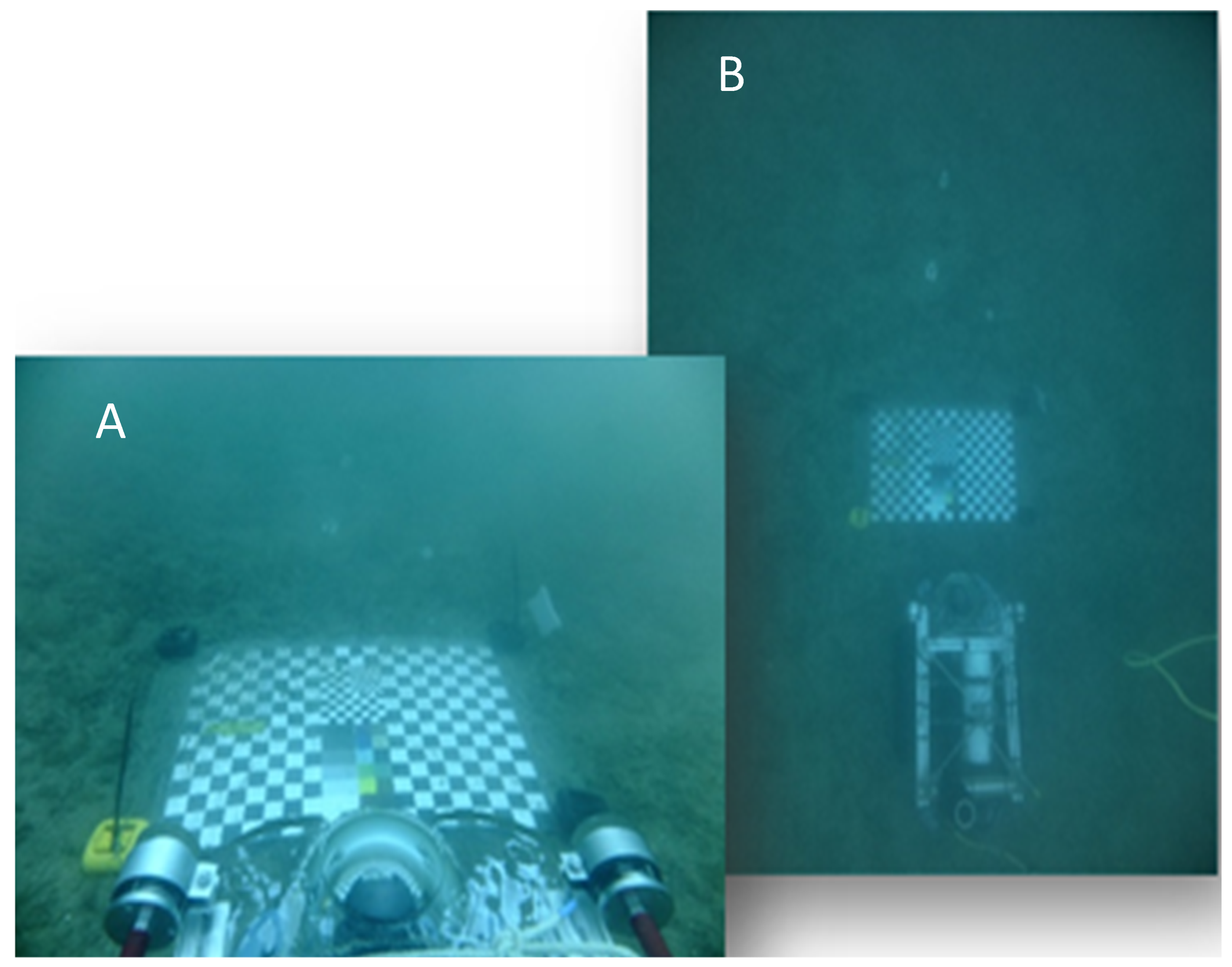
2.4.2. Camera Calibration
2.4.3. Images Vertical Transformation and Spatial Collation
2.5. The Validation of Crawler Ecological Monitoring Efficiency
3. Results
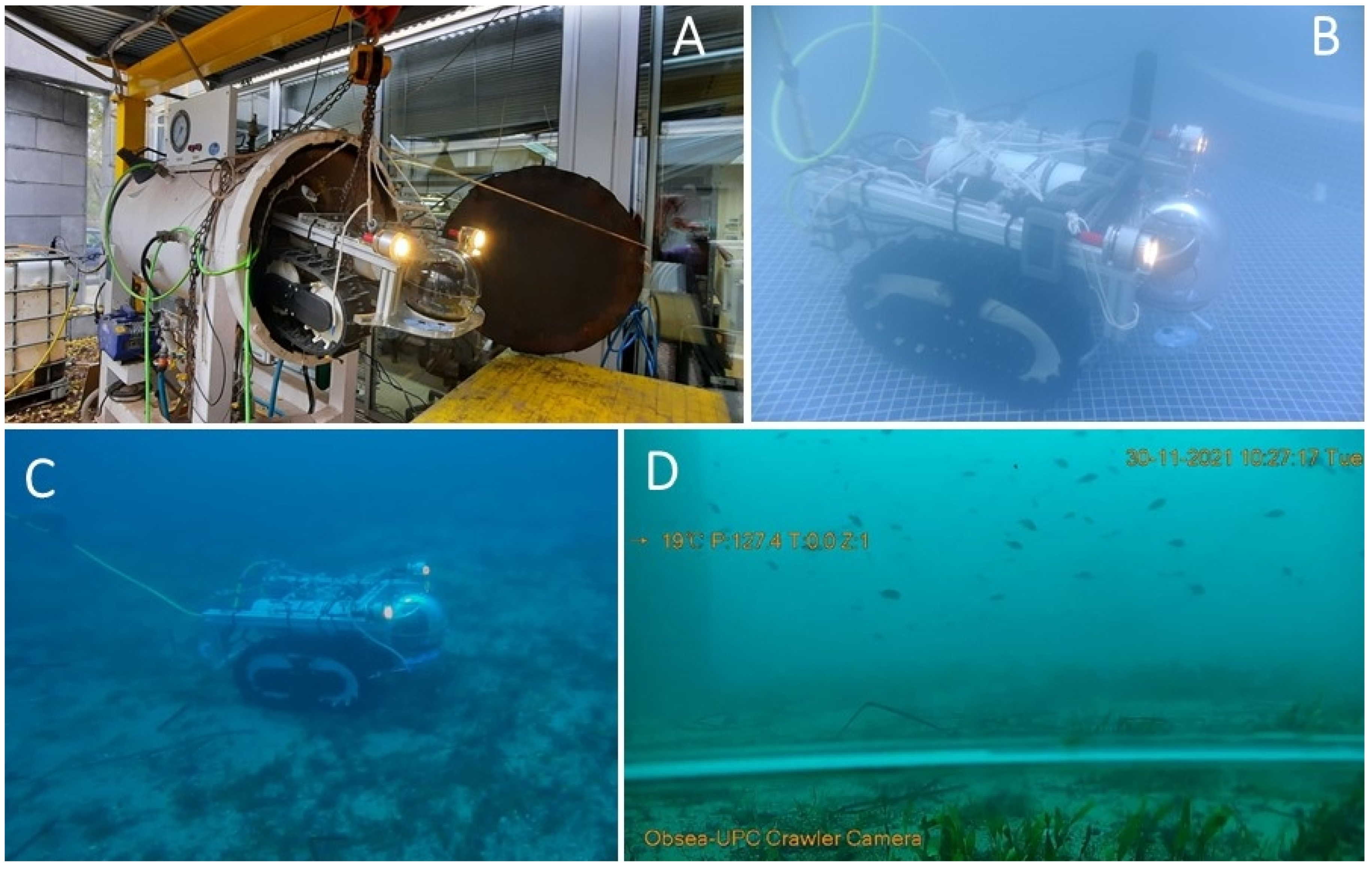
3.1. The Testing of the Crawler Components
3.2. The Validation of Crawler Driving Functionalities
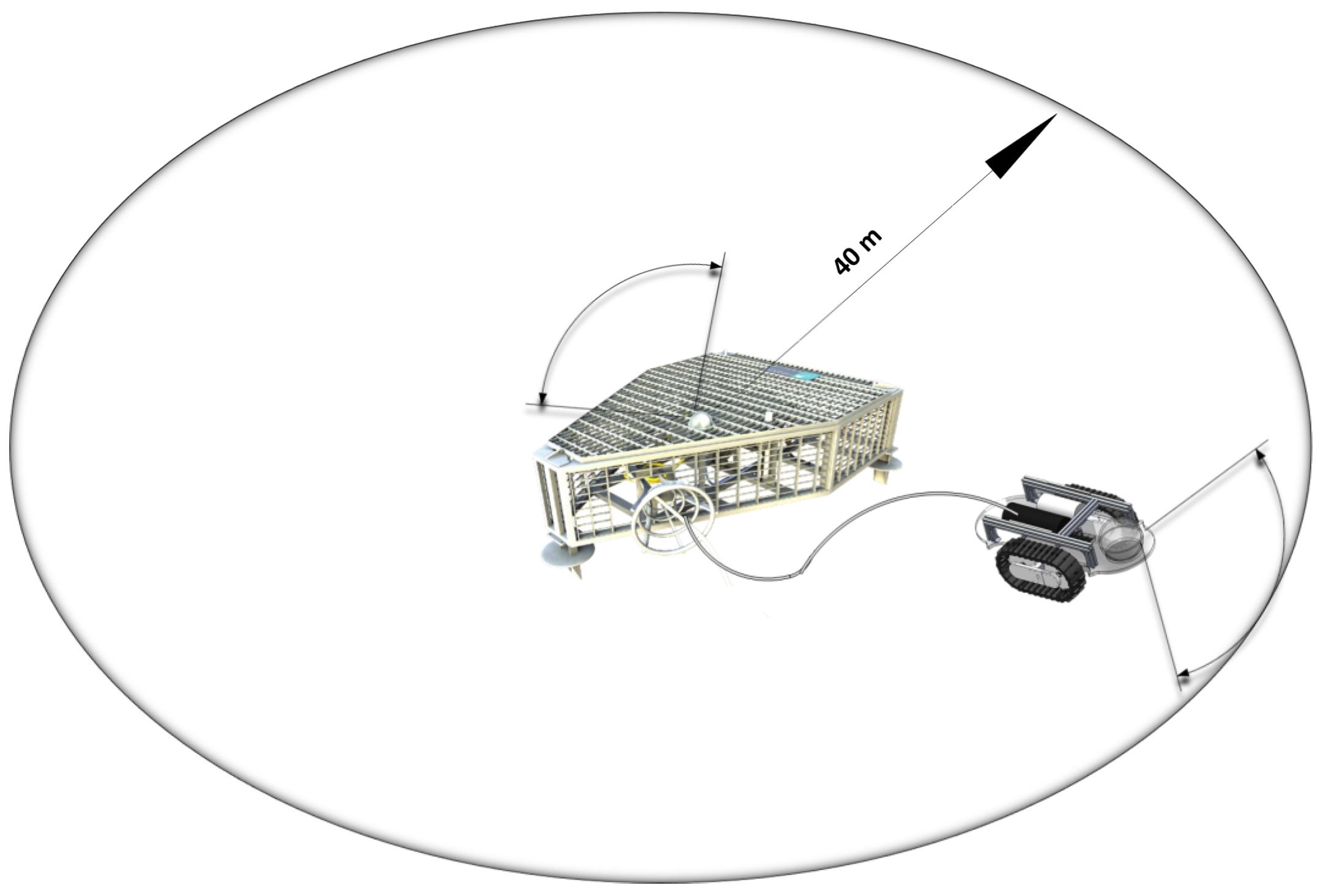
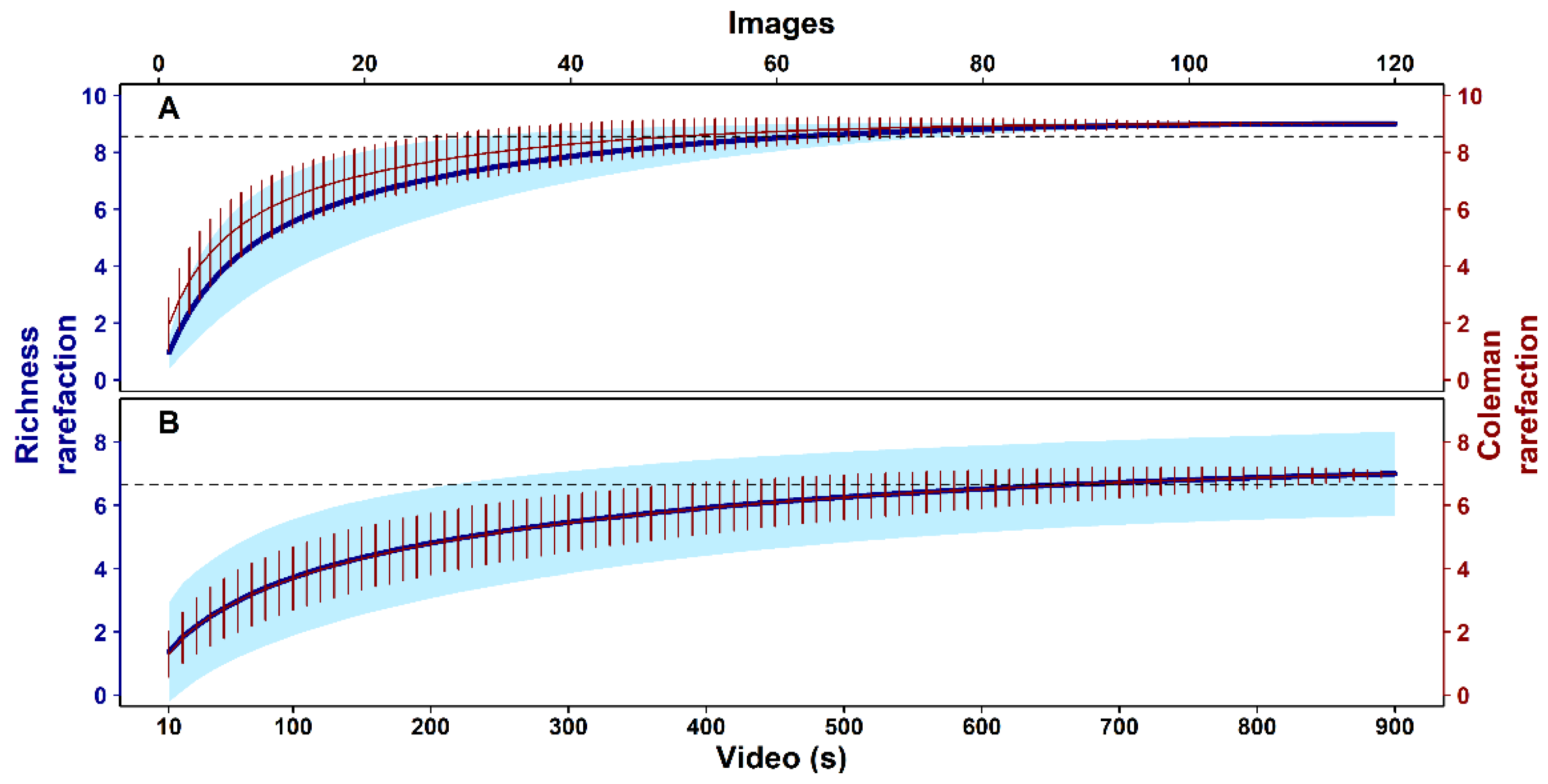
3.3. Extension of the Monitoring Radius and Outcomes of Crawler Video-Monitoring Efficiency
3.4. The Automatically Generated Photo-Mosaics
4. Discussion
4.1. Technological Challenges during the Construction, Deployment, and Testing Process
4.2. The Validation of the Crawler Video Data for Ecological Monitoring
4.3. Scientific and Operational Impact
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Costa, C.; Fanelli, E.; Marini, S.; Danovaro, R.; Aguzzi, J. Global Deep-Sea Biodiversity Research Trends Highlighted by Science Mapping Approach. Front. Mar. Sci. 2020, 7, 384. [Google Scholar] [CrossRef]
- Barnes, C.R.; Tunnicliffe, V. Building the World’s First Multi-Node Cabled Ocean Observatories (NEPTUNE Canada and VENUS, Canada): Science, Realities, Challenges and Opportunities. In Proceedings of the OCEANS 2008-MTS/IEEE Kobe Techno-Ocean, Kobe, Japan, 8–11 April 2008. [Google Scholar] [CrossRef]
- Favali, P.; Beranzoli, L. Seafloor Observatory Science: A Review. Ann. Geophys. 2006, 49, 515–567. [Google Scholar] [CrossRef]
- Barnes, C.R.; Best, M.M.R.; Johnson, F.R.; Pautet, L.; Pirenne, B. Erratum: Challenges, Benefits, and Opportunities in Installing and Operating Cabled Ocean Observatories: Perspectives from NEPTUNE Canada (IEEE Journal of Oceanic Engineering (2013) 38:1 (144–157)). IEEE J. Ocean. Eng. 2013, 38, 406. [Google Scholar] [CrossRef]
- Aguzzi, J.; Chatzievangelou, D.; Marini, S.; Fanelli, E.; Danovaro, R.; Flögel, S.; Lebris, N.; Juanes, F.; De Leo, F.C.; Del Rio, J.; et al. New High-Tech Flexible Networks for the Monitoring of Deep-Sea Ecosystems. Environ. Sci. Technol. 2019, 53, 6616–6631. [Google Scholar] [CrossRef]
- Grinyó, J.; Francescangeli, M.; Santín, A.; Ercilla, G.; Estrada, F.; Mecho, A.; Fanelli, E.; Costa, C.; Danovaro, R.; Company, J.B.; et al. Megafaunal Assemblages in Deep-Sea Ecosystems of the Gulf of Cadiz, Northeast Atlantic Ocean. Deep Sea Res. Part I Oceanogr. Res. Pap. 2022, 183, 103738. [Google Scholar] [CrossRef]
- Dodge, K.L.; Kukulya, A.L.; Burke, E.; Baumgartner, M.F. TurtleCam: A “Smart” Autonomous Underwater Vehicle for Investigating Behaviors and Habitats of Sea Turtles. Front. Mar. Sci. 2018, 5, 90. [Google Scholar] [CrossRef]
- Veitch, E.; Alsos, O.A. Human-Centered Explainable Artificial Intelligence for Marine Autonomous Surface Vehicles. J. Mar. Sci. Eng. 2021, 9, 1227. [Google Scholar] [CrossRef]
- Wu, G.; Lu, Z.; Luo, Z.; Shang, J.; Sun, C.; Zhu, Y. Experimental Analysis of a Novel Adaptively Counter-Rotating Wave Energy Converter for Powering Drifters. J. Mar. Sci. Eng. 2019, 7, 171. [Google Scholar] [CrossRef]
- Aguzzi, J.; Costa, C.; Calisti, M.; Funari, V.; Stefanni, S.; Danovaro, R.; Gomes, H.I.; Vecchi, F.; Dartnell, L.R.; Weiss, P.; et al. Research Trends and Future Perspectives in Marine Biomimicking Robotics. Sensors 2021, 21, 3778. [Google Scholar] [CrossRef]
- Danovaro, B.R.; Aguzzi, J.; Fanelli, E.; Smith, C.R. An Ecosystem-Based Deep-Ocean Strategy. Science 2017, 355, 452–454. [Google Scholar] [CrossRef]
- Glaviano, F.; Esposito, R.; Di Cosmo, A.; Esposito, F.; Gerevini, L.; Ria, A.; Molinara, M.; Bruschi, P.; Costantini, M.; Zupo, V. Management and Sustainable Exploitation of Marine Environments through Smart Monitoring and Automation. J. Mar. Sci. Eng. 2022, 10, 297. [Google Scholar] [CrossRef]
- Juniper, S.K.; Matabos, M.; Mihály, S.; Ajayamohan, R.S.; Gervais, F.; Bui, A.O.V. A Year in Barkley Canyon: A Time-Series Observatory Study of Mid-Slope Benthos and Habitat Dynamics Using the NEPTUNE Canada Network. Deep Sea Res. Part II Top. Stud. Oceanogr. 2013, 92, 114–123. [Google Scholar] [CrossRef]
- Robison, B.H.; Reisenbichler, K.R.; Sherlock, R.E. The Coevolution of Midwater Research and ROV Technology at MBARI. Oceanography 2017, 30, 26–37. [Google Scholar] [CrossRef]
- Bicknell, A.W.J.; Godley, B.J.; Sheehan, E.V.; Votier, S.C.; Witt, M.J. Camera Technology for Monitoring Marine Biodiversity and Human Impact. Front. Ecol. Environ. 2016, 14, 424–432. [Google Scholar] [CrossRef]
- Canonico, G.; Buttigieg, P.L.; Montes, E.; Muller-Karger, F.E.; Stepien, C.; Wright, D.; Benson, A.; Helmuth, B.; Costello, M.; Sousa-Pinto, I.; et al. Global Observational Needs and Resources for Marine Biodiversity. Front. Mar. Sci. 2019, 6, 367. [Google Scholar] [CrossRef]
- Mellin, C.; Parrott, L.; Andréfouët, S.; Bradshaw, C.J.A.; MacNeil, M.A.; Caley, M.J. Multi-Scale Marine Biodiversity Patterns Inferred Efficiently from Habitat Image Processing. Ecol. Appl. 2012, 22, 792–803. [Google Scholar] [CrossRef]
- Mallet, D.; Pelletier, D. Underwater Video Techniques for Observing Coastal Marine Biodiversity: A Review of Sixty Years of Publications (1952–2012). Fish. Res. 2014, 154, 44–62. [Google Scholar] [CrossRef]
- Aguzzi, J.; Iveša, N.; Gelli, M.; Costa, C.; Gavrilovic, A.; Cukrov, N.; Cukrov, M.; Cukrov, N.; Omanovic, D.; Štifanić, M.; et al. Ecological Video Monitoring of Marine Protected Areas by Underwater Cabled Surveillance Cameras. Mar. Policy 2020, 119, 104052. [Google Scholar] [CrossRef]
- Aguzzi, J.; Chatzievangelou, D.; Company, J.B.; Thomsen, L.; Marini, S.; Bonofiglio, F.; Juanes, F.; Rountree, R.; Berry, A.; Chumbinho, R.; et al. The Potential of Video Imagery from Worldwide Cabled Observatory Networks to Provide Information Supporting Fish-Stock and Biodiversity Assessment. ICES J. Mar. Sci. 2020, 77, 2396–2410. [Google Scholar] [CrossRef]
- Brandt, A.; Gutt, J.; Hildebrandt, M.; Pawlowski, J.; Schwendner, J.; Soltwedel, T.; Thomsen, L. Cutting the Umbilical: New Technological Perspectives in Benthic Deep-Sea Research. J. Mar. Sci. Eng. 2016, 4, 36. [Google Scholar] [CrossRef]
- Ayma, A.; Aguzzi, J.; Canals, M.; Lastras, G.; Bahamon, N.; Mecho, A.; Company, J.B. Comparison between ROV Video and Agassiz Trawl Methods for Sampling Deep Water Fauna of Submarine Canyons in the Northwestern Mediterranean Sea with Observations on Behavioural Reactions of Target Species. Deep Sea Res. Part I Oceanogr. Res. Pap. 2016, 114, 149–159. [Google Scholar] [CrossRef]
- Aguzzi, J.; Company, J.B. Chronobiology of Deep-Water Decapod Crustaceans on Continental Margins. In Advances in Marine Biology; Elsevier Ltd.: Amsterdam, The Netherlands, 2010; Volume 58, pp. 155–225. [Google Scholar]
- Aguzzi, J.; Company, J.B.; Costa, C.; Menesatti, P.; Garcia, J.A.; Bahamon, N.; Puig, P.; Sarda, F. Activity Rhythms in the Deep-Sea: A Chronobiological Approach. Front. Biosci. 2011, 16, 131–150. [Google Scholar] [CrossRef] [PubMed]
- Aguzzi, J.; López-Romero, D.; Marini, S.; Costa, C.; Berry, A.; Chumbinho, R.; Ciuffardi, T.; Fanelli, E.; Pieretti, N.; Del Río, J.; et al. Multiparametric Monitoring of Fish Activity Rhythms in an Atlantic Coastal Cabled Observatory. J. Mar. Syst. 2020, 212, 103424. [Google Scholar] [CrossRef]
- Aguzzi, J.; Company, J.B.; Costa, C.; Matabos, M.; Azzurro, E.; Mánuel, A.; Menesatti, P.; Sardá, F.; Canals, M.; Delory, E.; et al. Challenges to the Assessment of Benthic Populations and Biodiversity as a Result of Rhythmic Behaviour: Video Solutions from Cabled Observatories. Oceanogr. Mar. Biol. Annu. Rev. 2012, 50, 235–286. [Google Scholar] [CrossRef]
- Rountree, R.A.; Aguzzi, J.; Marini, S.; Fanelli, E.; De Leo, F.C.; del Río Fernandez, J.; Juanes, F. Towards an Optimal Design for Ecosystem-Level Ocean Observatories. In Oceanography and Marine Biology; Taylor & Francis: Abingdon, UK, 2020. [Google Scholar]
- Cuvelier, D.; Legendre, P.; Laes, A.; Sarradin, P.M.; Sarrazin, J. Rhythms and Community Dynamics of a Hydrothermal Tubeworm Assemblage at Main Endeavour Field—A Multidisciplinary Deep-Sea Observatory Approach. PLoS ONE 2014, 9, e96924. [Google Scholar] [CrossRef]
- Cristini, L.; Lampitt, R.S.; Cardin, V.; Delory, E.; Haugan, P.; O’Neill, N.; Petihakis, G.; Ruhl, H.A. Cost and Value of Multidisciplinary Fixed-Point Ocean Observatories. Mar. Policy 2016, 71, 138–146. [Google Scholar] [CrossRef]
- Linley, T.D.; Craig, J.; Jamieson, A.J.; Priede, I.G. Bathyal and Abyssal Demersal Bait-Attending Fauna of the Eastern Mediterranean Sea. Mar. Biol. 2018, 165, 159. [Google Scholar] [CrossRef]
- Priede, I.G.; Godbold, J.A.; King, N.J.; Collins, M.A.; Bailey, D.M.; Gordon, J.D.M. Deep-Sea Demersal Fish Species Richness in the Porcupine Seabight, NE Atlantic Ocean: Global and Regional Patterns. Mar. Ecol. 2010, 31, 247–260. [Google Scholar] [CrossRef]
- Aguzzi, J.; Fanelli, E.; Ciuffardi, T.; Schirone, A.; De Leo, F.C.; Doya, C.; Kawato, M.; Miyazaki, M.; Furushima, Y.; Costa, C.; et al. Faunal Activity Rhythms Influencing Early Community Succession of an Implanted Whale Carcass Offshore Sagami Bay, Japan. Sci. Rep. 2018, 8, 11163. [Google Scholar] [CrossRef]
- Aguzzi, J.; Chatzievangelou, D.; Francescangeli, M.; Marini, S.; Bonofiglio, F.; Del Rio, J.; Danovaro, R. The Hierarchic Treatment of Marine Ecological Information from Spatial Networks of Benthic Platforms. Sensors 2020, 20, 1751. [Google Scholar] [CrossRef]
- Aguzzi, J.; Flögel, S.; Marini, S.; Thomsen, L.; Albiez, J.; Weiss, P.; Picardi, G.; Calisti, M.; Stefanni, S.; Mirimin, L.; et al. Developing Technological Synergies between Deep-Sea and Space Research. Elementa 2022, 10, 64. [Google Scholar] [CrossRef]
- Johansson, B.; Siesjö, J.; Furuholmen, M. Seaeye Sabertooth A Hybrid AUV/ROV offshore system. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; pp. 1–3. [Google Scholar] [CrossRef]
- Chardard, Y.; Copros, T. Swimmer: Final Sea Demonstration of This Innovative Hybrid AUV/ROV System. In Proceedings of the 2002 Interntional Symposium on Underwater Technology, Tokyo, Japan, 19 April 2002. [Google Scholar] [CrossRef]
- Zhang, Y.X.; Zhang, Q.F.; Zhang, A.Q.; Chen, J.; Li, X.; He, Z. Acoustics-Based Autonomous Docking for A Deep-Sea Resident ROV. China Ocean Eng. 2022, 36, 100–111. [Google Scholar] [CrossRef]
- Podder, T.; Sibenac, M.; Bellingham, J. AUV Docking System for Sustainable Science Missions. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 4478–4485. [Google Scholar] [CrossRef]
- Palomeras, N.; Vallicrosa, G.; Mallios, A.; Bosch, J.; Vidal, E.; Hurtos, N.; Carreras, M.; Ridao, P. AUV Homing and Docking for Remote Operations. Ocean Eng. 2018, 154, 106–120. [Google Scholar] [CrossRef]
- Palomeras, N.; Peñalver, A.; Massot-Campos, M.; Vallicrosa, G.; Negre, P.L.; Fernández, J.J.; Ridao, P.; Sanz, P.J.; Oliver-Codina, G.; Palomer, A. I-AUV Docking and Intervention in a Subsea Panel. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2279–2285. [Google Scholar] [CrossRef]
- Purser, A.; Thomsen, L.; Barnes, C.; Best, M.; Chapman, R.; Hofbauer, M.; Menzel, M.; Wagner, H. Temporal and Spatial Benthic Data Collection via an Internet Operated Deep Sea Crawler. Methods Oceanogr. 2013, 5, 1–18. [Google Scholar] [CrossRef]
- Xie, C.; Wang, L.; Yang, N.; Agee, C.; Chen, M.; Zheng, J.; Liu, J.; Chen, Y.; Xu, L.; Qu, Z.; et al. A Compact Design of Underwater Mining Vehicle for the Cobalt-Rich Crust with General Support Vessel Part A: Prototype and Tests. J. Mar. Sci. Eng. 2022, 10, 135. [Google Scholar] [CrossRef]
- Raber, G.T.; Schill, S.R. Reef Rover: A Low-Cost Small Autonomous Unmanned Surface Vehicle (Usv) for Mapping and Monitoring Coral Reefs. Drones 2019, 3, 38. [Google Scholar] [CrossRef]
- Picardi, G.; Chellapurath, M.; Iacoponi, S.; Stefanni, S.; Laschi, C.; Calisti, M. Bioinspired Underwater Legged Robot for Seabed Exploration with Low Environmental Disturbance. Sci. Robot. 2020, 5, eaaz1012. [Google Scholar] [CrossRef]
- Chatzievangelou, D.; Aguzzi, J.; Scherwath, M.; Thomsen, L. Quality Control and Pre-Analysis Treatment of the Environmental Datasets Collected by an Internet Operated Deep-Sea Crawler during Its Entire 7-Year Long Deployment (2009–2016). Sensors 2020, 20, 2991. [Google Scholar] [CrossRef] [PubMed]
- Flögel, S.; Ahrns, I.; Nuber, C.; Hildebrandt, M.; Duda, A.; Schwendner, J.; Wilde, D. A New Deep-Sea Crawler System—MANSIO-VIATOR. In Proceedings of the 2018 OCEANS—MTS/IEEE Kobe Techno-Oceans, OCEANS—Kobe 2018, Kobe, Japan, 28–31 May 2018; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2018. [Google Scholar]
- Doya, C.; Chatzievangelou, D.; Bahamon, N.; Purser, A.; De Leo, F.C.; Juniper, S.K.; Thomsen, L.; Aguzzi, J. Seasonal Monitoring of Deep-Sea Megabenthos in Barkley Canyon Cold Seep by Internet Operated Vehicle (IOV). PLoS ONE 2017, 12, e0176917. [Google Scholar] [CrossRef]
- Chatzievangelou, D.; Aguzzi, J.; Ogston, A.; Suárez, A.; Thomsen, L. Visual Monitoring of Key Deep-Sea Megafauna with Internet Operated Crawlers as a Tool for Ecological Status Assessment. Prog. Oceanogr. 2020, 184, 102321. [Google Scholar] [CrossRef]
- Chatzievangelou, D.; Thomsen, L.; Doya, C.; Purser, A.; Aguzzi, J. Transects in the Deep: Opportunities with Tele-Operated Resident Seafloor Robots. Front. Mar. Sci. 2022, 9, 833617. [Google Scholar] [CrossRef]
- ONC Ocean Networks Canada. Available online: https://www.oceannetworks.ca/ (accessed on 1 October 2022).
- Norppa Underwater Crawler. Available online: https://seaterra.de/web/UXO/start/index.php (accessed on 1 October 2022).
- Aguzzi, J.; Mànuel, A.; Condal, F.; Guillén, J.; Nogueras, M.; del Rio, J.; Costa, C.; Menesatti, P.; Puig, P.; Sardà, F.; et al. The New Seafloor Observatory (OBSEA) for Remote and Long-Term Coastal Ecosystem Monitoring. Sensors 2011, 11, 5850–5872. [Google Scholar] [CrossRef] [PubMed]
- Del-Rio, J.; Sarria, D.; Aguzzi, J.; Masmitja, I.; Carandell, M.; Olive, J.; Gomariz, S.; Santamaria, P.; Manuel Lazaro, A.; Nogueras, M.; et al. Obsea: A Decadal Balance for a Cabled Observatory Deployment. IEEE Access 2020, 8, 33163–33177. [Google Scholar] [CrossRef]
- JERICO. Integrated Pan-European Multidisciplinary, and Multi-Platform Research Infrastructure Dedicated to a Holistic Appraisal of Coastal Marine System, C. Available online: https://www.jerico-ri.eu/ (accessed on 10 April 2021).
- Molino, E.; Artero, C.; Nogueras, M.; Toma, D.M.; Sarria, D.; Cadena, J.; Río, J.; Manuel, A. Oceanographic Buoy Expands OBSEA Capabilities. In Fourth International Workshop on Marine Technology; Universitat Politècnica de Catalunya: Barcelona, Spain, 2011; pp. 3–5. [Google Scholar]
- Christ, R.D.; Wernli, R.L. The ROV Manual: A User Guide for Observation Class Remotely Operated Vehicles; Butterworth-Heinemann: Oxford, UK, 2011; ISBN 9780750681483. [Google Scholar]
- Wiki Odroid Website. Available online: https://wiki.odroid.com/odroid-c4/odroid-c4 (accessed on 12 March 2020).
- Negahdaripour, S.; Xu, X. Mosaic-Based Positioning and Improved Motion-Estimation Methods for Automatic Navigation of Submersible Vehicles. IEEE J. Ocean. Eng. 2002, 27, 79–99. [Google Scholar] [CrossRef]
- Firoozfam, P.; Negahdaripour, S. Multi-Camera Conical Imaging; Calibration and Robust 3-D Motion Estimation for ROV-Based Mapping and Positioning. Ocean. Conf. Rec. 2002, 3, 1595–1602. [Google Scholar] [CrossRef]
- Campos, R.; Gracias, N.; Ridao, P. Underwater Multi-Vehicle Trajectory Alignment and Mapping Using Acoustic and Optical Constraints. Sensors 2016, 16, 387. [Google Scholar] [CrossRef]
- Skarlatos, D.; Agrafiotis, P. Image-Based Underwater 3d Reconstruction for Cultural Heritage: From Image Collection to 3d. Critical Steps and Considerations. In Springer Series on Cultural Computing; Springer: Berlin/Heidelberg, Germany, 2020; pp. 141–158. [Google Scholar]
- Georgopoulos, A.; Agrafiotis, P. Documentation of a Submerged Monument Using Improved Two Media Techniques. In Proceedings of the 18th International Conference on Virtual Systems and Multimedia, Milan, Italy, 2–5 September 2012; pp. 173–180. [Google Scholar]
- Xiong, P.; Wang, S.; Wang, W.; Ye, Q.; Ye, S. Model-Independent Lens Distortion Correction Based on Sub-Pixel Phase Encoding. Sensors 2021, 21, 7465. [Google Scholar] [CrossRef]
- Assis, J.; Claro, B.; Ramos, A.; Boavida, J.; Serrão, E.A. Performing Fish Counts with a Wide-Angle Camera, a Promising Approach Reducing Divers’ Limitations. J. Exp. Mar. Biol. Ecol. 2013, 445, 93–98. [Google Scholar] [CrossRef]
- Cole, R.G. Abundance, Size Structure, and Diver-Oriented Behaviour of Three Large Benthic Carnivorous Fishes in a Marine Reserve in Northeastern New Zealand. Biol. Conserv. 1994, 70, 93–99. [Google Scholar] [CrossRef]
- Coleman, B.D. On Random Placement and Species-Area Relations. Math. Biosci. 1981, 54, 191–215. [Google Scholar] [CrossRef]
- Coleman, B.D.; Mares, M.A.; Willig, M.R.; Hsieh, Y.-H. Randomness, Area, and Species Richness. Ecology 1982, 63, 1121–1133. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2020. [Google Scholar]
- Colwell, R.K. EstimateS: Statistical Estimation of Species Richness and Shared Species from Samples. Version 9 and Earlier. User’s Guide and Application. 2013. Available online: http://purl.oclc.org/estimates (accessed on 10 April 2020).
- Trident Underwater Drone. Available online: https://content.sofarocean.com/hubfs/Trident_manualV6.pdf (accessed on 8 January 2022).
- Froese, R.; Pauly, D. FishBase, Version (12/2019). World Wide Web Electronic Publication. Available online: www.fishbase.org (accessed on 10 April 2020).
- Thomsen, L.; Flögel, S. Temporal and Spatial Benthic Data Collection via Mobile Robots: Present and Future Applications. In Proceedings of the OCEANS 2015—Genova, Genova, Italy, 18–21 May 2015; pp. 7–11. [Google Scholar]
- Margalef, R. ECOLOGÍA; OMEGA, S.A.: Barcelona, Spain, 1986; Available online: http://www.ediciones-omega.es/ecologia/47-ecologia-978-84-282-0405-7.html (accessed on 10 April 2021).
- Meteoblue Webpage. Available online: https://www.meteoblue.com/ (accessed on 10 January 2022).
- OBSEA Webpage. Available online: https://data.obsea.es/erddap/tabledap/OBSEA_Besos_Buoy_Airmar_200WX_meteo_30min.html (accessed on 10 January 2022).
- Antonijuan, J.; Guillén, J.; Nogueras, M.; Mànuel, A.; Palanques, A.; Puig, P. Monitoring Sediment Dynamics at the Boundary between the Coastal Zone and the Continental Shelf. In Proceedings of the OCEANS 2011 IEEE—Spain, Santander, Spain, 6–9 June 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Meccia, V.L.; Borghini, M.; Sparnocchia, S. Abyssal Circulation and Hydrographic Conditions in the Western Ionian Sea during Spring-Summer 2007 and Autumn-Winter 2007–2008. Deep Sea Res. Part I Oceanogr. Res. Pap. 2015, 104, 26–40. [Google Scholar] [CrossRef]
- Canals, M.; Puig, P.; De Madron, X.D.; Heussner, S.; Palanques, A.; Fabres, J. Flushing Submarine Canyons. Nature 2006, 444, 354–357. [Google Scholar] [CrossRef] [PubMed]
- Hollister, C.D.; McCave, I.N. McCave Sedimentation under Deep-Sea Storms. Nature 1984, 309, 220–225. [Google Scholar] [CrossRef]
- Purser, A.; Ontrup, J.; Schoening, T.; Thomsen, L.; Tong, R.; Unnithan, V.; Nattkemper, T.W. Microhabitat and Shrimp Abundance within a Norwegian Cold-Water Coral Ecosystem. Biogeosciences 2013, 10, 5779–5791. [Google Scholar] [CrossRef]
- Chatzievangelou, D.; Doya, C.; Thomsen, L.; Purser, A.; Aguzzi, J. High-Frequency Patterns in the Abundance of Benthic Species near a Cold-Seep—An Internet Operated Vehicle Application. PLoS ONE 2016, 11, e0163808. [Google Scholar] [CrossRef]
- Stojanovic, M.; Beaujean, P.P.J. Acoustic Communication. In Springer Handbook of Ocean Engineering; Springer: Cham, Switzerland, 2016; pp. 359–386. [Google Scholar]
- Webster, S.E.; Eustice, R.M.; Murphy, C.; Singh, H.; Whitcomb, L.L. Toward a Platform-Independent Acoustic Communications and Navigation System for Underwater Vehicles. In Proceedings of the OCEANS 2009, MTS/IEEE Biloxi—Marine Technology for Our Future: Global and Local Challenges, Biloxi, MS, USA, 26–29 October 2009. [Google Scholar] [CrossRef]
- Masmitjà, I.; Kieft, B.; O’Reilly, T.; Katija, K.; Fannjiang, C. Mobile Robotic Platforms for the Acoustic Tracking of Deep-Sea Demersal Fishery Resources. Sci. Robot. 2020, 5, 3701. [Google Scholar] [CrossRef]
- Vigo, M.; Navarro, J.; Masmitja, I.; Aguzzi, J.; García, J.A.; Rotllant, G.; Bahamón, N.C. Spatial Ecology of Norway Lobster Nephrops Norvegicus in Mediterranean Deep-Water Environments: Implications for Designing No-Take Marine Reserves. Mar. Ecol. Prog. Ser. 2021, 674, 173–188. [Google Scholar] [CrossRef]
- Aspillaga, E.; Safi, K.; Hereu, B.; Bartumeus, F. Modelling the Three-Dimensional Space Use of Aquatic Animals Combining Topography and Eulerian Telemetry Data. Methods Ecol. Evol. 2019, 10, 1551–1557. [Google Scholar] [CrossRef]
- Evologic. Available online: https://evologics.de/acoustic-modem/42-65 (accessed on 5 July 2022).
- Ahmad, N.; Ghazilla, R.A.R.; Khairi, N.M.; Kasi, V. Reviews on Various Inertial Measurement Unit (IMU) Sensor Applications. Int. J. Signal Process. Syst. 2013, 1, 256–262. [Google Scholar] [CrossRef]
- Khairuddin, A.R.; Talib, M.S.; Haron, H. Review on Simultaneous Localization and Mapping (SLAM). In Proceedings of the 2015 IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 27–29 November 2015; pp. 85–90. [Google Scholar] [CrossRef]
- Aguzzi, J.; Doya, C.; Tecchio, S.; De Leo, F.C.; Azzurro, E.; Costa, C.; Sbragaglia, V.; Del Río, J.; Navarro, J.; Ruhl, H.A.; et al. Coastal Observatories for Monitoring of Fish Behaviour and Their Responses to Environmental Changes. Rev. Fish Biol. Fish. 2015, 25, 463–483. [Google Scholar] [CrossRef]
- Aguzzi, J.; Sbragaglia, V.; Santamaría, G.; Del Río, J.; Sardà, F.; Nogueras, M.; Manuel, A. Daily Activity Rhythms in Temperate Coastal Fishes: Insights from Cabled Observatory Video Monitoring. Mar. Ecol. Prog. Ser. 2013, 486, 223–236. [Google Scholar] [CrossRef]
- Gates, A.R.; Horton, T.; Serpell-Stevens, A.; Chandler, C.; Grange, L.J.; Robert, K.; Bevan, A.; Jones, D.O.B. Ecological Role of an Offshore Industry Artificial Structure. Front. Mar. Sci. 2019, 6, 675. [Google Scholar] [CrossRef]
- Ottaviani, E.; Francescangeli, M.; Gjeci, N.; del Rio Fernandez, J.; Aguzzi, J.; Marini, S. Assessing the Image Concept Drift at the OBSEA Coastal Underwater Cabled Observatory. Front. Mar. Sci. 2022, 9, 459. [Google Scholar] [CrossRef]
- Marini, S.; Fanelli, E.; Sbragaglia, V.; Azzurro, E.; Del Rio Fernandez, J.; Aguzzi, J. Tracking Fish Abundance by Underwater Image Recognition. Sci. Rep. 2018, 8, 13748. [Google Scholar] [CrossRef]
- Campbell, S.; Abu-Tair, M.; Naeem, W. An Automatic COLREGs-Compliant Obstacle Avoidance System for an Unmanned Surface Vehicle. Proceedings of the Institution of Mechanical Engineers, Part M. J. Eng. Marit. Environ. 2014, 228, 108–121. [Google Scholar] [CrossRef]
- Dai, X.; Mao, Y.; Huang, T.; Qin, N.; Huang, D.; Li, Y. Automatic Obstacle Avoidance of Quadrotor UAV via CNN-Based Learning. Neurocomputing 2020, 402, 346–358. [Google Scholar] [CrossRef]
- Aguzzi, J.; Sbragaglia, V.; Tecchio, S.; Navarro, J.; Company, J.B. Rhythmic Behaviour of Marine Benthopelagic Species and the Synchronous Dynamics of Benthic Communities. Deep Sea Res. Part I Oceanogr. Res. Pap. 2015, 95, 1–11. [Google Scholar] [CrossRef]
- Grane-Feliu, X.; Bennett, S.; Hereu, B.; Aspillaga, E.; Santana-Garcon, J. Comparison of Diver Operated Stereo-Video and Visual Census to Assess Targeted Fish Species in Mediterranean Marine Protected Areas. J. Exp. Mar. Bio. Ecol. 2019, 520, 151205. [Google Scholar] [CrossRef]
- Thomsen, L.; Aguzzi, J.; Costa, C.; De Leo, F.; Ogston, A.; Purser, A. The Oceanic Biological Pump: Rapid Carbon Transfer to Depth at Continental Margins during Winter. Sci. Rep. 2017, 7, 10763. [Google Scholar] [CrossRef] [PubMed]
- Aguzzi, J.; Albiez, J.; Flögel, S.; Godø, O.R.; Grimsbø, E.; Marini, S.; Pfannkuche, O.; Rodriguez, E.; Thomsen, L.; Torkelsen, T.; et al. A Flexible Autonomous Robotic Observatory Infrastructure for Bentho-Pelagic Monitoring. Sensors 2020, 20, 1614. [Google Scholar] [CrossRef] [PubMed]
- Tessier, A.; Pastor, J.; Francour, P.; Saragoni, G.; Crec’hriou, R.; Lenfant, P. Video Transects as a Complement to Underwater Visual Census to Study Reserve Effect on Fish Assemblages. Aquat. Biol. 2013, 18, 229–241. [Google Scholar] [CrossRef]
- Azzurro, E.; Aguzzi, J.; Maynou, F.; Chiesa, J.J.; Savini, D. Diel Rhythms in Shallow Mediterranean Rocky-Reef Fishes: A Chronobiological Approach with the Help of Trained Volunteers. J. Mar. Biol. Assoc. U. K. 2013, 93, 461–470. [Google Scholar] [CrossRef]
- Aguzzi, J.; Chatzievangelou, D.; Robinson, N.J.; Bahamon, N.; Berry, A.; Carreras, M.; Company, J.B.; Costa, C.; del Rio Fernandez, J.; Falahzadeh, A.; et al. Advancing Fishery-Independent Stock Assessments for the Norway Lobster (Nephrops Norvegicus) with New Monitoring Technologies. Front. Mar. Sci. 2022, 9, 969071.1–969071.18. [Google Scholar] [CrossRef]
- Francescangeli, M.; Sbragaglia, V.; del Rio Fernandez, J.; Trullols, E.; Antonijuan, J.; Massana, I.; Prat, J.; Nogueras Cervera, M.; Mihai Toma, D.; Aguzzi, J. Long-Term Monitoring of Diel and Seasonal Rhythm of Dentex Dentex at an Artificial Reef. Front. Mar. Sci. 2022, 9, 308. [Google Scholar] [CrossRef]
- Campos-Candela, A.; Palmer, M.; Balle, S.; Alós, J. A Camera-Based Method for Estimating Absolute Density in Animals Displaying Home Range Behaviour. J. Anim. Ecol. 2018, 87, 825–837. [Google Scholar] [CrossRef]
- Refinetti, R.; Cornélissen, G.; Halberg, F. Procedures for Numerical Analysis of Circadian Rhythms; Taylor & Francis: Abingdon, UK, 2007; Volume 38. ISBN 184354 9131.
- Wilson, R.R.; Smith, K.L. Effect of Near-Bottom Currents on Detection of Bait by the Abyssal Grenadier Fishes Coryphaenoides Spp., Recorded in Situ with a Video Camera on a Free Vehicle. Mar. Biol. 1984, 84, 83–91. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Brand | Nominal Voltage (V) | Power Consumption (W) | Costs (EUR) |
|---|---|---|---|---|
| Controller | ODROID C4 | 12 | 5 | 80 |
| Camera | SNC-241RSIA | 48 | 23 | 750 |
| Lights | ExtraStar (LED) | 12 | 8 | 2 × 200 |
| Motor Controller | Faulhaber SC5008S | 12 | 2 | 2 × 275 |
| Motor | Faulhaber 3564K 048B | 48 | 126 | 2 × 785 |
| Compass | CMPS01 | 5 | 1 | 50 |
| Electrical Boards | Easy EDA (PCB) | 48,12 | 2 | 200 |
| Acoustic Modem | S2C—Evologic | 24 | 5.5 | 8000 |
| Cable and Connectors | Falmat (FM022208-01) | Up to 600 | --- | 7000 |
| Structure and Mechanical Parts | --- | --- | --- | 9400 |
| Total | EUR 28,000 |
| OBSEA | Crawler | |
|---|---|---|
| Chromis chromis | 350 (11.111) | 163 (0.671) |
| Coris julis | 0 | 23 (0.095) |
| Dentex dentex | 17 (0.54) | 0 |
| Diplodus cervinus | 3 (0.095) | 0 |
| Diplodus spp. | 7 (0.222) | 0 |
| Labridae | 0 | 10 (0.041) |
| Seriola dumerili | 7 (0.222) | 0 |
| Serranus cabrilla | 0 | 1 (0.004) |
| OTU 1 | 46 (1.460) | 3 (0.012) |
| OTU 2 | 33 (1.048) | 0 |
| OTU 3 | 3 (0.095) | 0 |
| OTU 4 | 21 (0.667) | 0 |
| OTU 5 | 0 | 5 (0.021) |
| OTU 6 | 0 | 2 (0.008) |
| Total | 487 (15.460) | 207 (0.852) |
| Category | Specifications | OBSEA Crawler | Wally | Rossia | Norppa |
|---|---|---|---|---|---|
| Ecosystem Domain | Depth Rating (m) | Coastal (50) | Deep-sea (6000) | Deep-sea (3000) | Deep-sea (300) |
| Technical Specifications | Dimensions LWH (cm) | 100 × 55 × 40 | 129 × 106 × 89 | 140 × 100 × 85 | 150 × 110 × 95 |
| Weight in air (kg) | 56 | 303 | 280 | 350 | |
| Motors | Faulhaber Brushless DC; 126 W, 12,800 rpm | Dunker Brushless DC; 600 W, 3370 rpm | Dunker Brushless DC; 600 W, 3370 rpm | Dunker Brushless DC; 600 W, 3370 rpm | |
| Operational Capacity | Payload | Camera, 2 × 4 W LEDs (able to carry CTD, ACDP, second camera, acoustic modem, and USBL) | 2 × cameras, laser scanner on PT unit, CTD, ADCP, fluorescence and turbidity meter, methane and oxygen sensors, and 3 × 33 W LEDs | 2 × cameras, laser scanner on PT unit, CTD, ADCP, fluorescence and turbidity meter, methane and oxygen sensors, 3 × 33 W LEDs, and benthic chamber | 2 × cameras, sonar, electromagnetics, CTD, and UXO sensor |
| Manipulator | N | N | On-demand | Y | |
| Data Products | Imaging, video, and auto photo-mosaics | Imaging, video, photo-mosaics, 3D-point clouds, and environmental | Imaging, video, photo-mosaics, 3D-point clouds, environmental, and physical sampling | Imaging, video, sonar, electromagnetics, environmental, TNT explosives, and chemistry | |
| Autonomy | Mission Control | Tethered, operated in real time/pre- programmed; hybrid (GUI and/or command- based) control; three locomotion modes (straight, turn, and rotate) | Tethered, operated in real time; hybrid (GUI and/or command- based) control; three locomotion modes (straight, turn, and rotate) | Tethered/ surface buoy/ autonomous, operated in real time/pre- programmed; GUI-based control; three locomotion modes (straight, turn, and rotate) | Tethered/ surface buoy/ autonomous, operated in real time/pre- programmed; ROS2 operating system; three locomotion modes (straight, turn, and rotate) with obstacle avoidance |
| Power Consumption (W) | 172.5 (at 100% motor power) | 800 (at 100% motor power) | 800 (at 100% motor power) | 1000 (at 100% motor power) | |
| Cost (EUR) | 28,000 | 150,000 | 320,000 | 400,000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Falahzadeh, A.; Toma, D.M.; Francescangeli, M.; Chatzievangelou, D.; Nogueras, M.; Martínez, E.; Carandell, M.; Tangerlini, M.; Thomsen, L.; Picardi, G.; et al. A New Coastal Crawler Prototype to Expand the Ecological Monitoring Radius of OBSEA Cabled Observatory. J. Mar. Sci. Eng. 2023, 11, 857. https://doi.org/10.3390/jmse11040857
Falahzadeh A, Toma DM, Francescangeli M, Chatzievangelou D, Nogueras M, Martínez E, Carandell M, Tangerlini M, Thomsen L, Picardi G, et al. A New Coastal Crawler Prototype to Expand the Ecological Monitoring Radius of OBSEA Cabled Observatory. Journal of Marine Science and Engineering. 2023; 11(4):857. https://doi.org/10.3390/jmse11040857
Chicago/Turabian StyleFalahzadeh, Ahmad, Daniel Mihai Toma, Marco Francescangeli, Damianos Chatzievangelou, Marc Nogueras, Enoc Martínez, Matias Carandell, Michael Tangerlini, Laurenz Thomsen, Giacomo Picardi, and et al. 2023. "A New Coastal Crawler Prototype to Expand the Ecological Monitoring Radius of OBSEA Cabled Observatory" Journal of Marine Science and Engineering 11, no. 4: 857. https://doi.org/10.3390/jmse11040857
APA StyleFalahzadeh, A., Toma, D. M., Francescangeli, M., Chatzievangelou, D., Nogueras, M., Martínez, E., Carandell, M., Tangerlini, M., Thomsen, L., Picardi, G., Le Bris, M., Dominguez, L., Aguzzi, J., & del Río, J. (2023). A New Coastal Crawler Prototype to Expand the Ecological Monitoring Radius of OBSEA Cabled Observatory. Journal of Marine Science and Engineering, 11(4), 857. https://doi.org/10.3390/jmse11040857