
Semi-Active Heave Compensation for a 600-Meter Hydraulic Salvaging Claw System with Ship Motion Prediction via LSTM Neural Networks

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
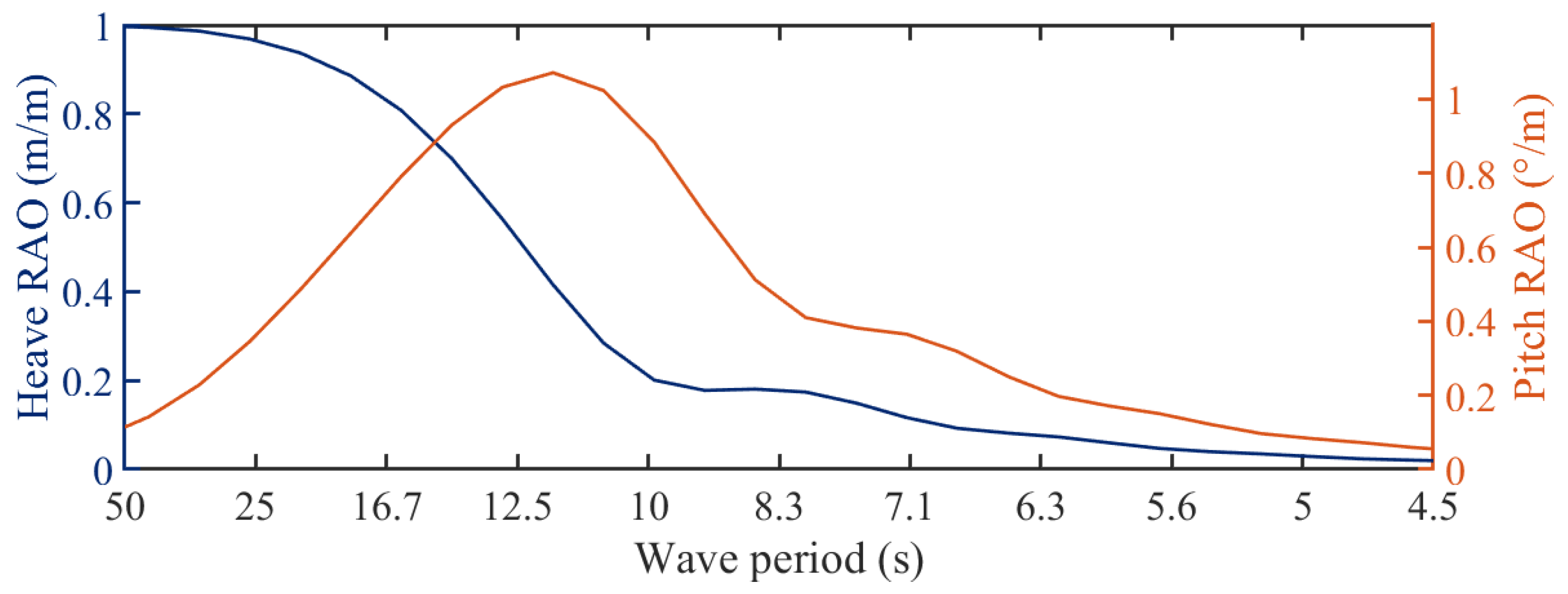
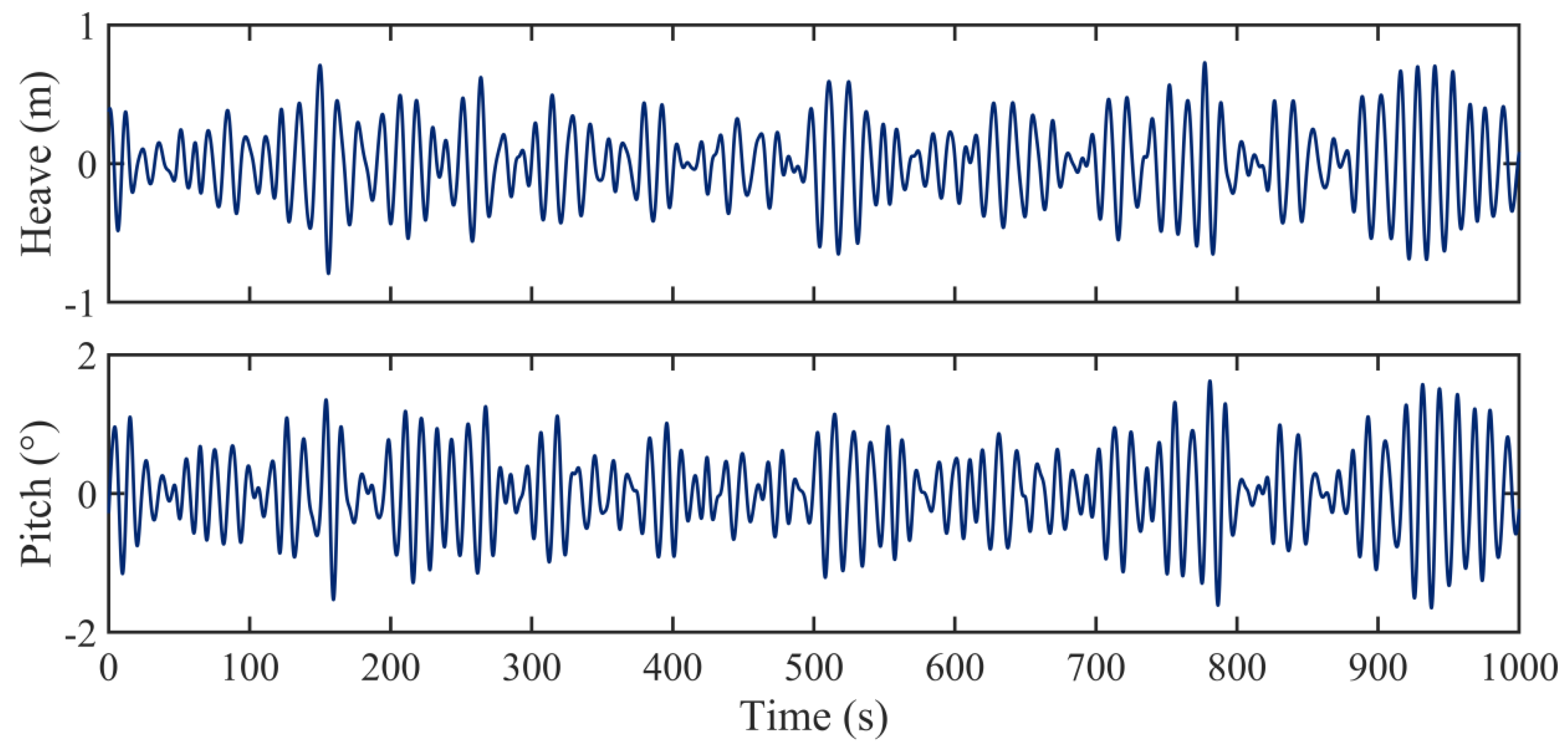
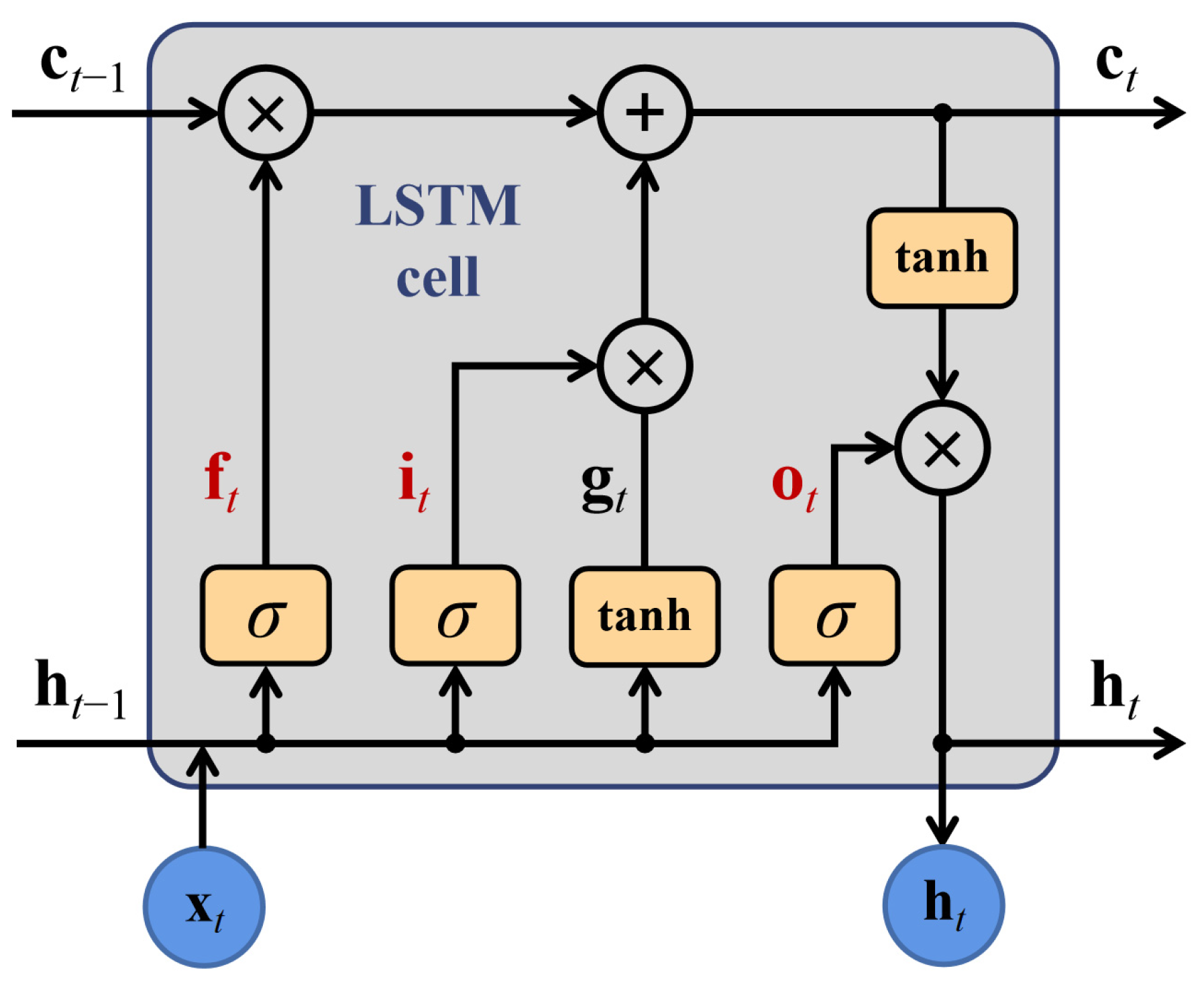
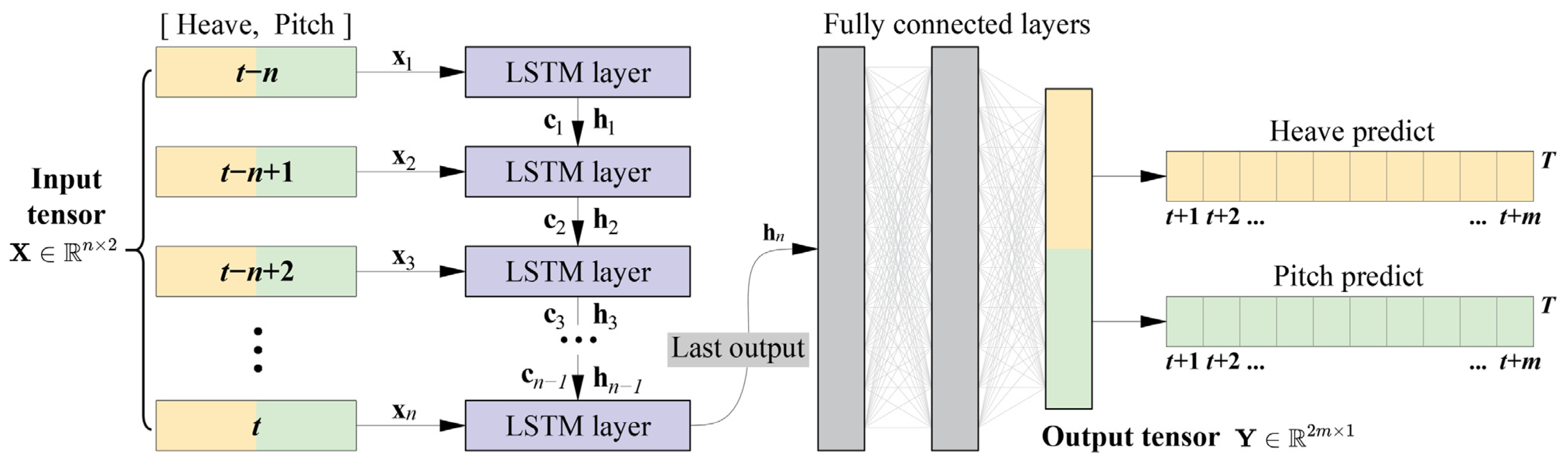
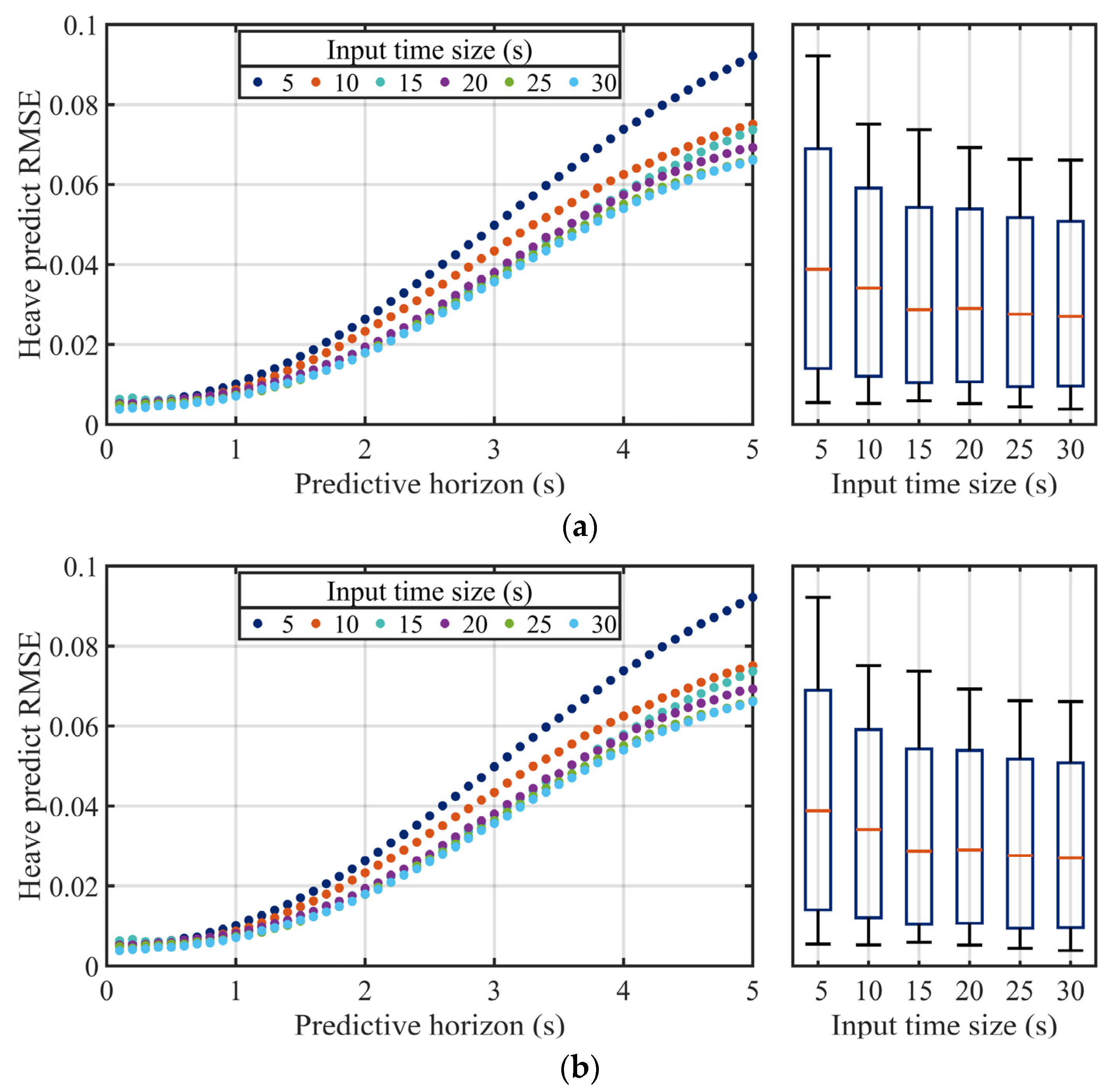
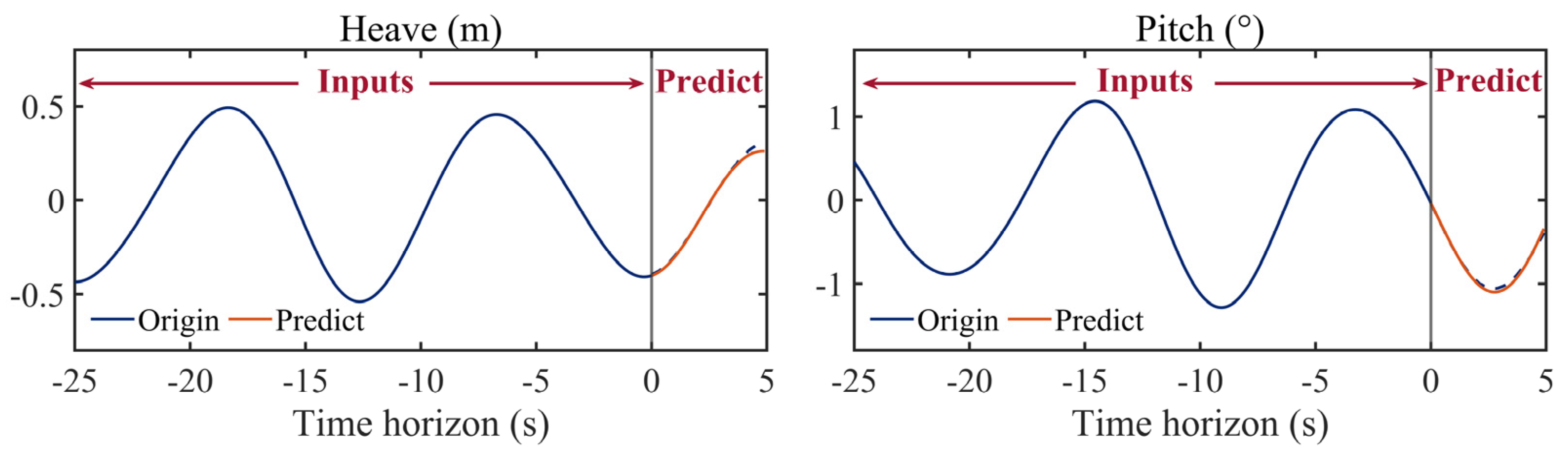
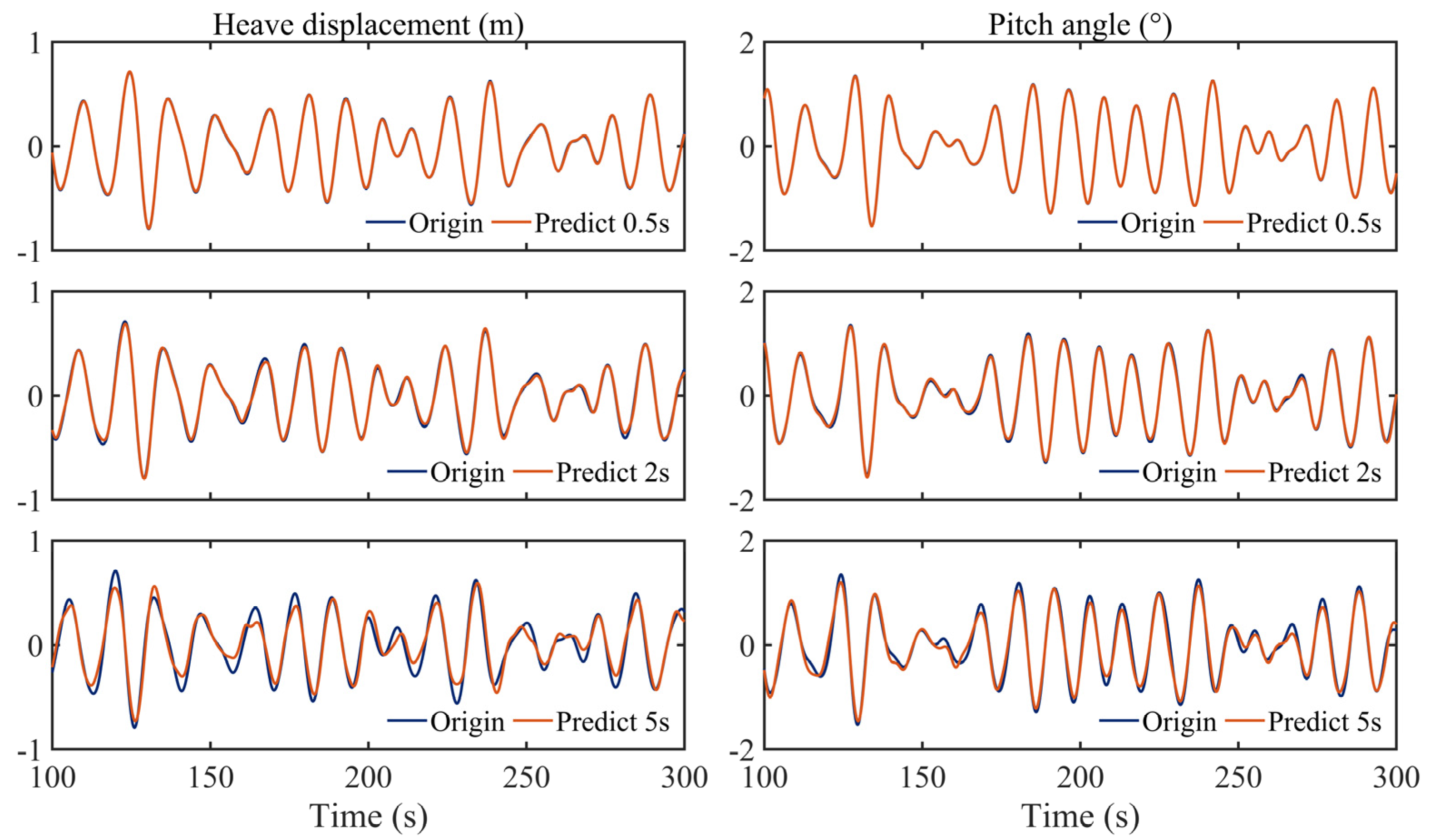
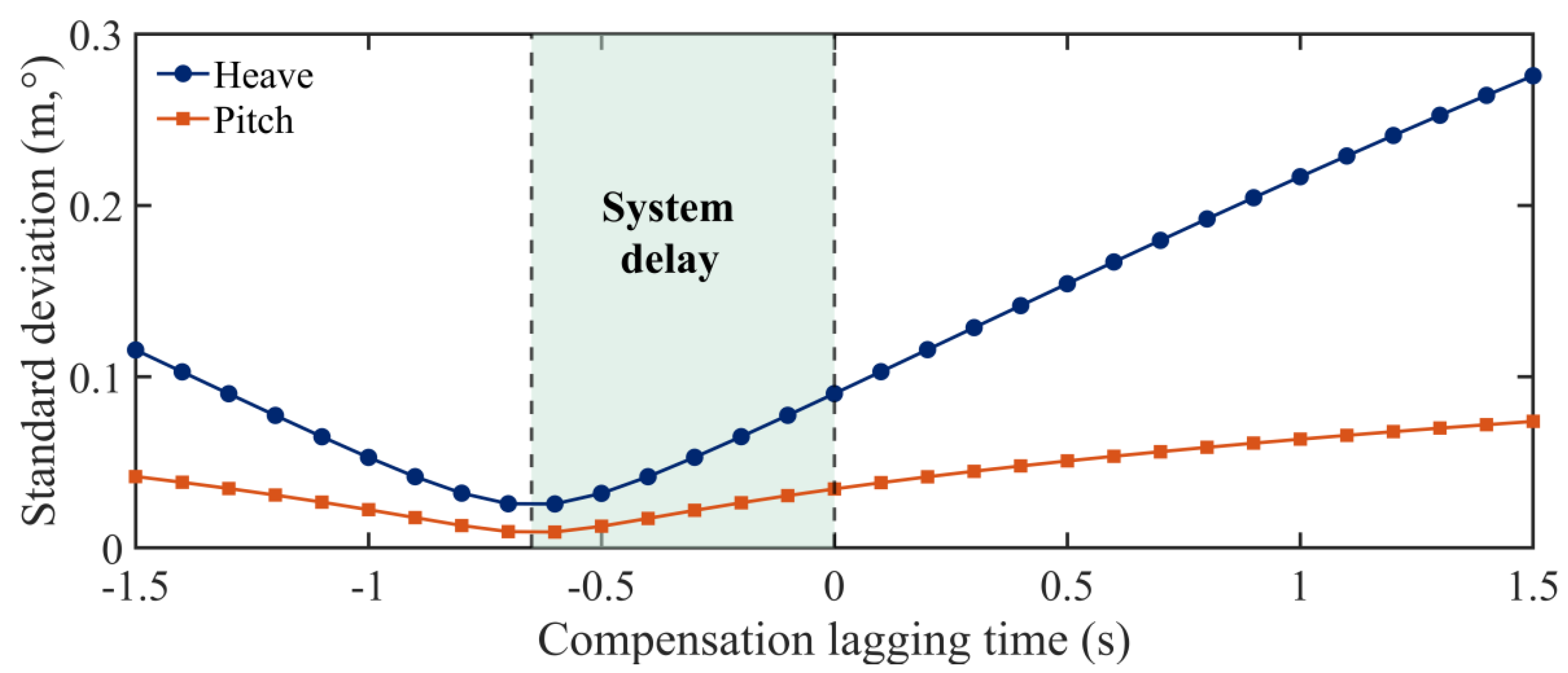
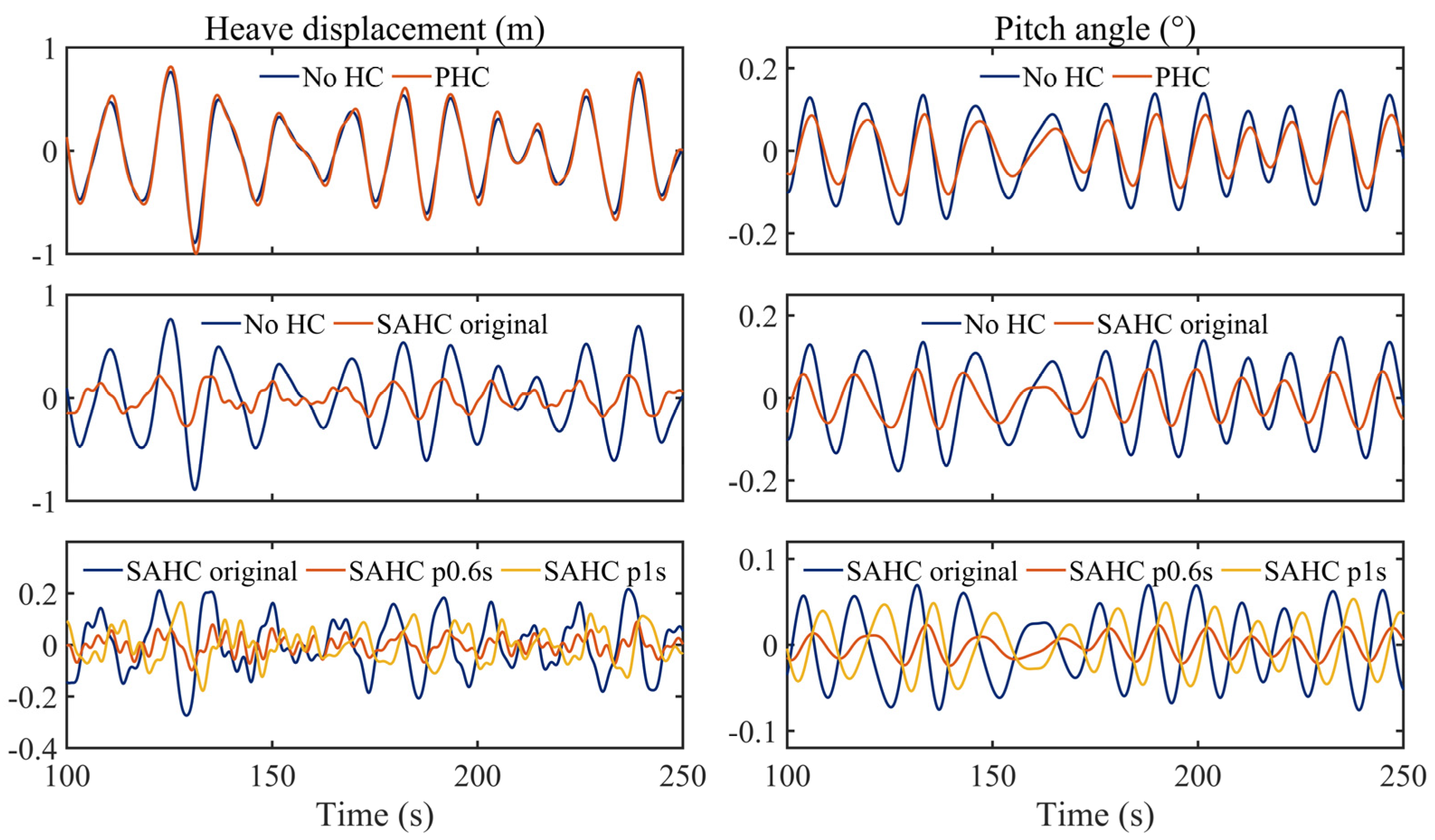
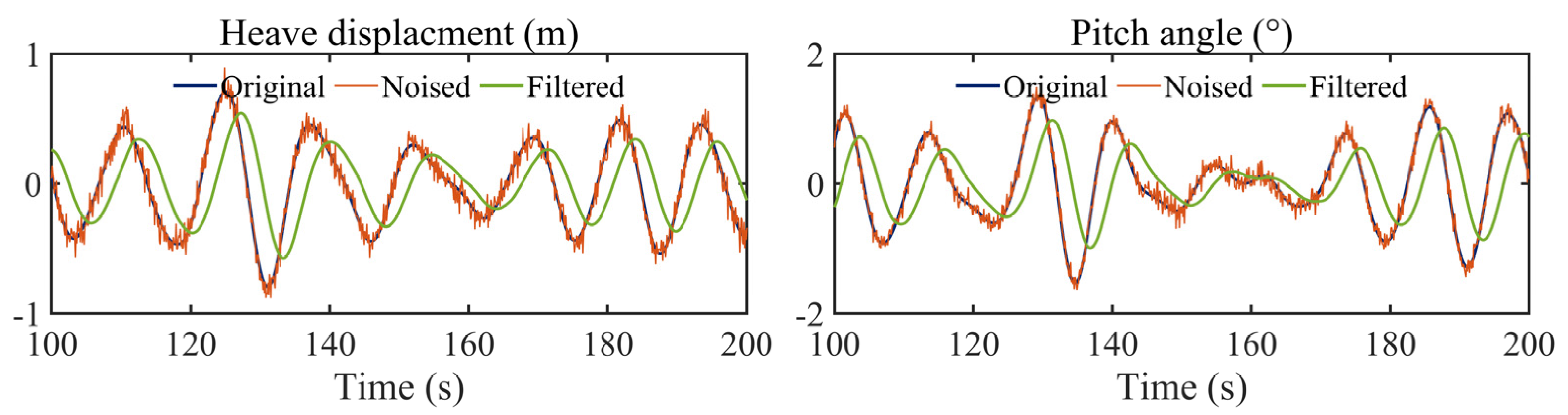
Abstract
Share and Cite
Zhang, F.; Ning, D.; Hou, J.; Du, H.; Tian, H.; Zhang, K.; Gong, Y. Semi-Active Heave Compensation for a 600-Meter Hydraulic Salvaging Claw System with Ship Motion Prediction via LSTM Neural Networks. J. Mar. Sci. Eng. 2023, 11, 998. https://doi.org/10.3390/jmse11050998
Zhang F, Ning D, Hou J, Du H, Tian H, Zhang K, Gong Y. Semi-Active Heave Compensation for a 600-Meter Hydraulic Salvaging Claw System with Ship Motion Prediction via LSTM Neural Networks. Journal of Marine Science and Engineering. 2023; 11(5):998. https://doi.org/10.3390/jmse11050998
Chicago/Turabian StyleZhang, Fengrui, Dayong Ning, Jiaoyi Hou, Hongwei Du, Hao Tian, Kang Zhang, and Yongjun Gong. 2023. "Semi-Active Heave Compensation for a 600-Meter Hydraulic Salvaging Claw System with Ship Motion Prediction via LSTM Neural Networks" Journal of Marine Science and Engineering 11, no. 5: 998. https://doi.org/10.3390/jmse11050998
APA StyleZhang, F., Ning, D., Hou, J., Du, H., Tian, H., Zhang, K., & Gong, Y. (2023). Semi-Active Heave Compensation for a 600-Meter Hydraulic Salvaging Claw System with Ship Motion Prediction via LSTM Neural Networks. Journal of Marine Science and Engineering, 11(5), 998. https://doi.org/10.3390/jmse11050998