
Array-Based Underwater Acoustic Target Classification with Spectrum Reconstruction Based on Joint Sparsity and Frequency Shift Invariant Feature

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
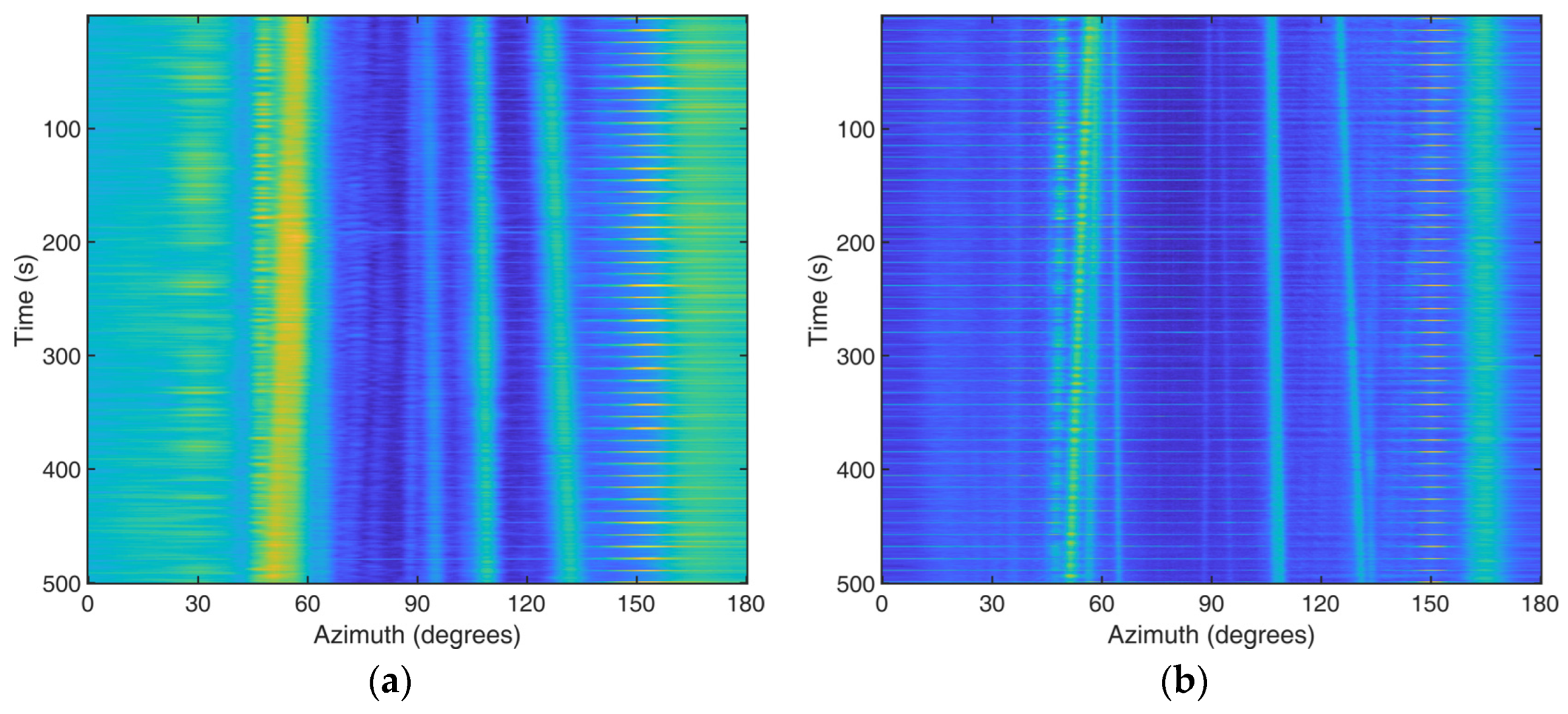
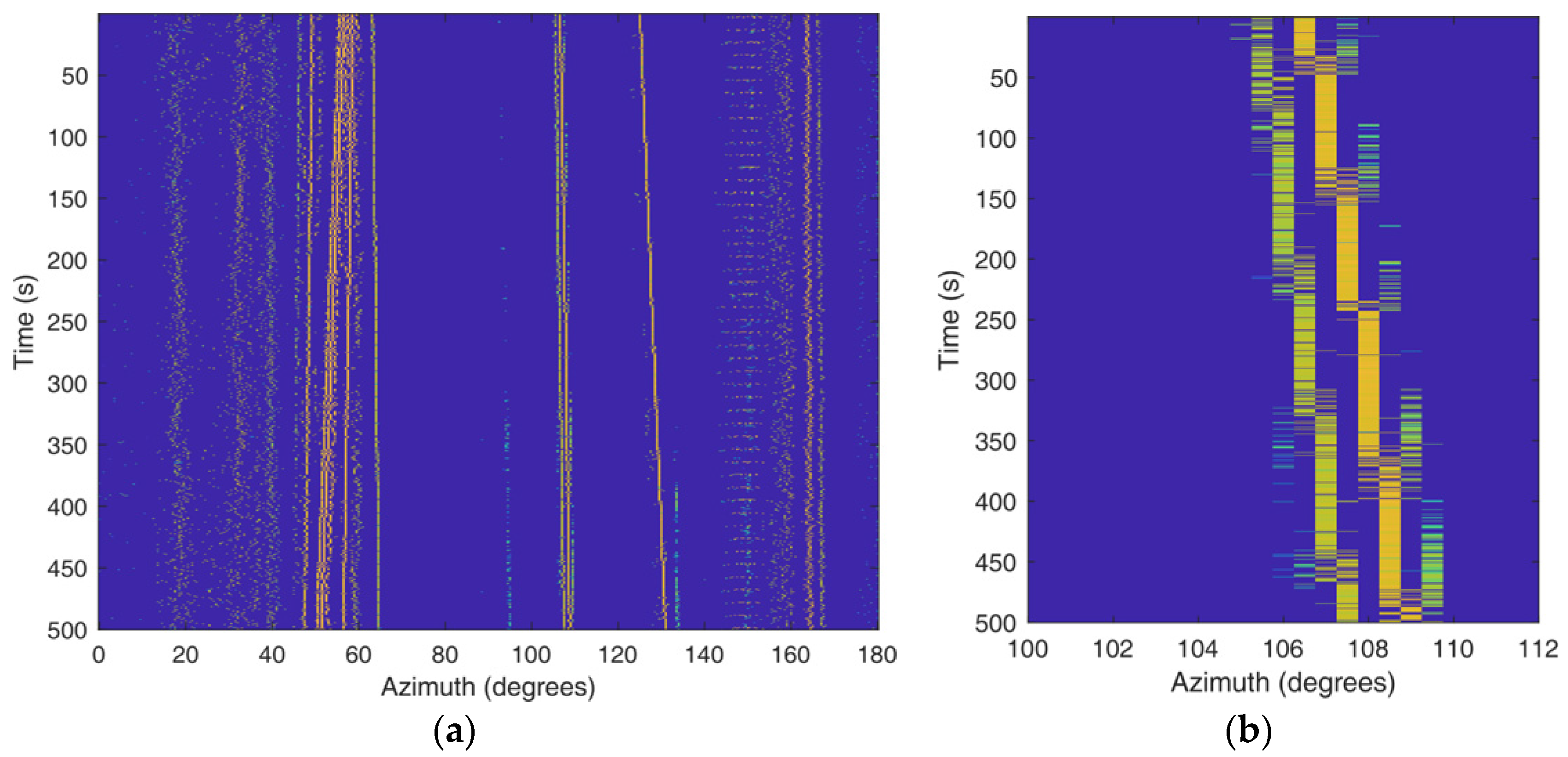
- With the help of hydrophone array data, we introduce a sparse decomposition framework with joint sparsity to perform high-resolution DOA estimation and improve the target spectrum reconstruction quality with a higher SNR gain;
- (2)
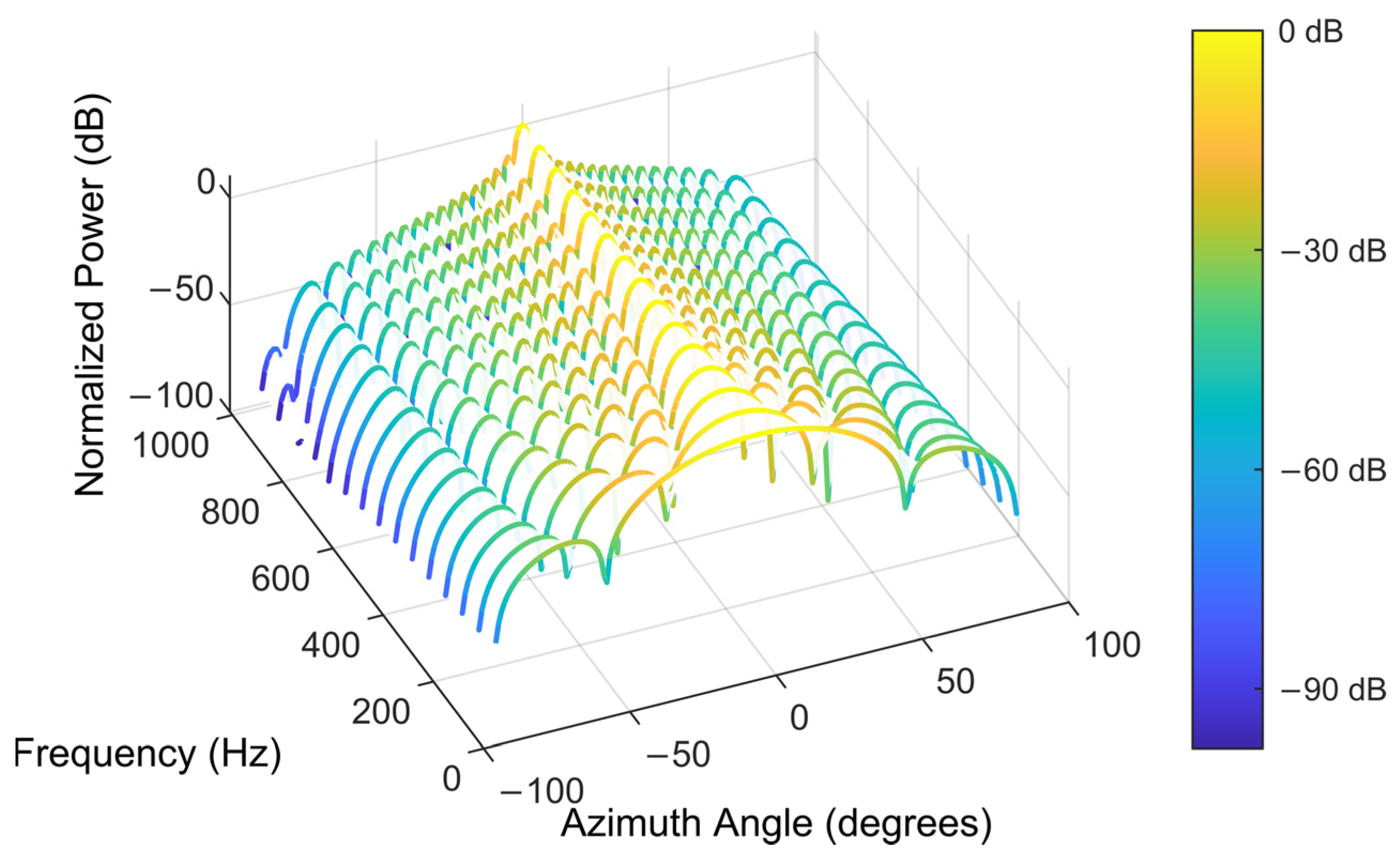
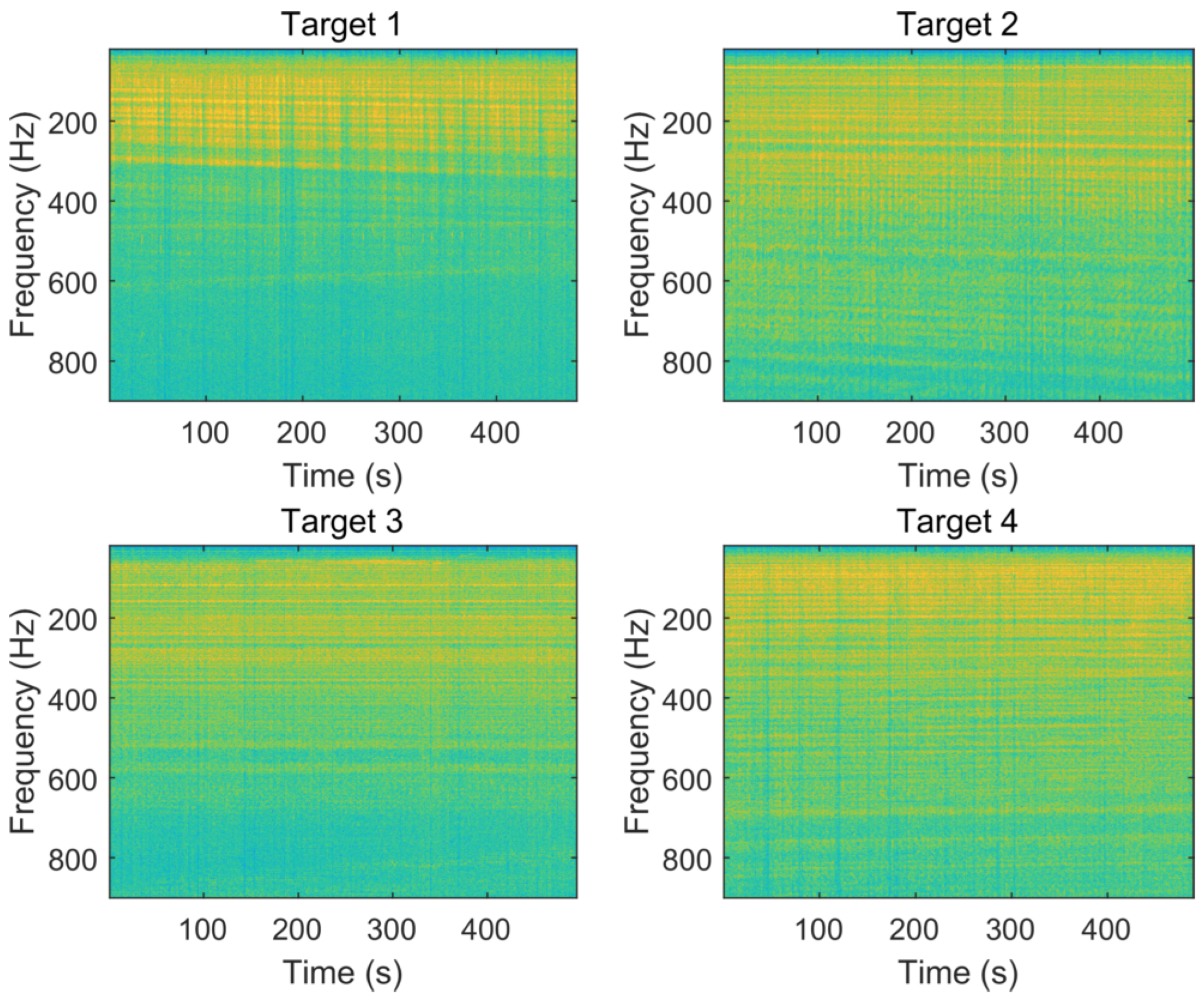
- We utilize joint sparsity to attain beamwidth constancy over different frequencies for target spectrum reconstruction, which makes our proposed method able to suppress interference and retain more target representative and discriminative spectral structural characteristics, which can be helpful to target classification tasks. Classification experiment conducted on real measured data validates the importance of attaining beamwidth constancy for underwater target recognition systems;
- (3)
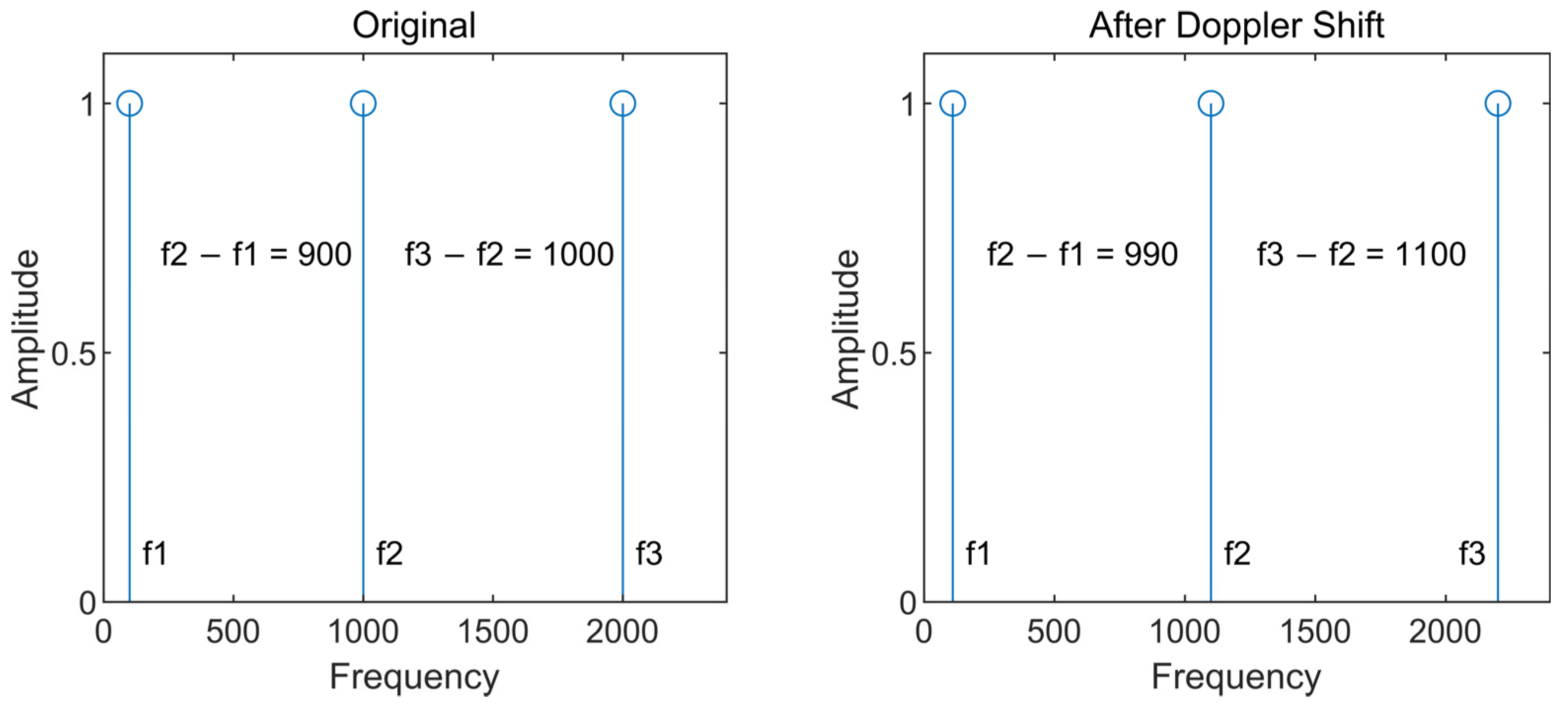
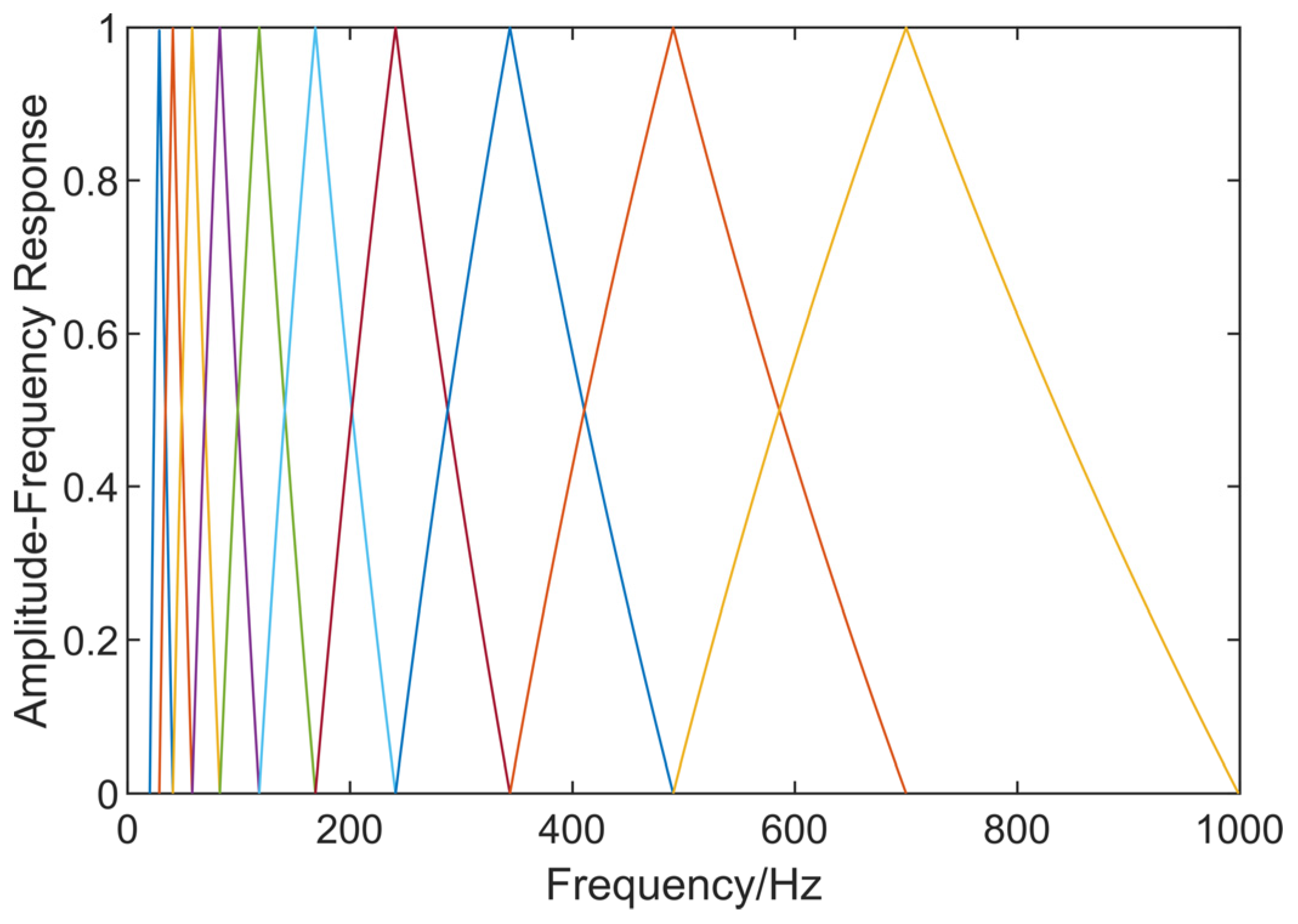
- To suppress the negative impact of target spectrum distortion caused by Doppler frequency shift on classification performance, considering that MFCC as a cepstral feature is convenient to process channel distortion, we adopt a similar framework of MFCC feature and design triangular filter banks to extract a frequency shift-invariant feature that is insensitive to spectrum frequency shift distortion and can help improve target classification performance.
2. Materials and Methods
2.1. Array Signal Model
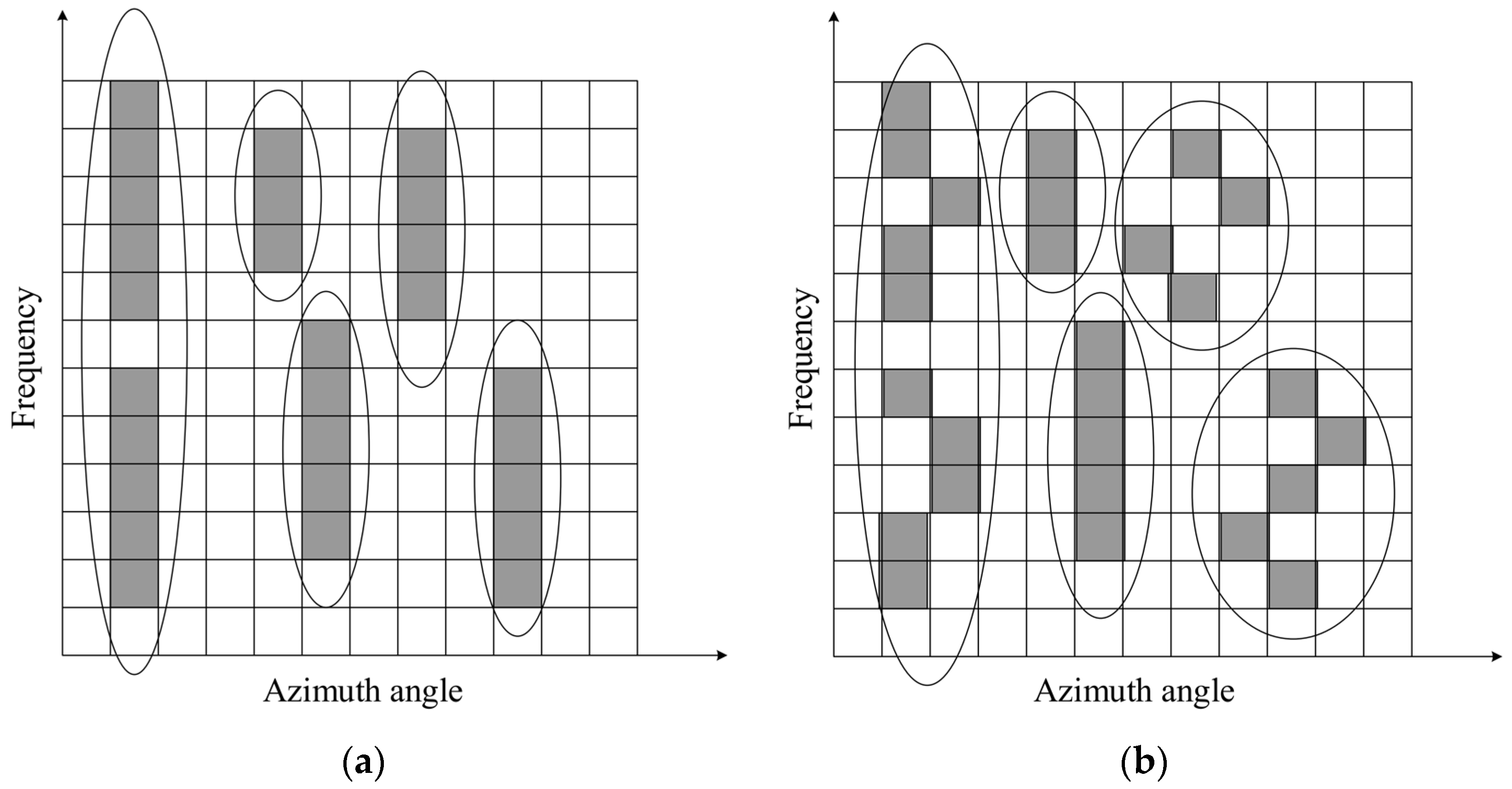
2.2. Constant Beamwidth Spectrum Reconstruction via Joint Sparsity
| Algorithm 1: Spectrum reconstruction by sparse Bayesian learning with joint sparsity. |
| Input: Received signal and Dictionary . Output: The reconstructed from direction Initialize: hyper-parameters , hidden variables . set , and iteration counter While
is the estimation from the previous iteration |
2.3. Robust Feature Extraction Method
3. Results
3.1. Experimental Settings
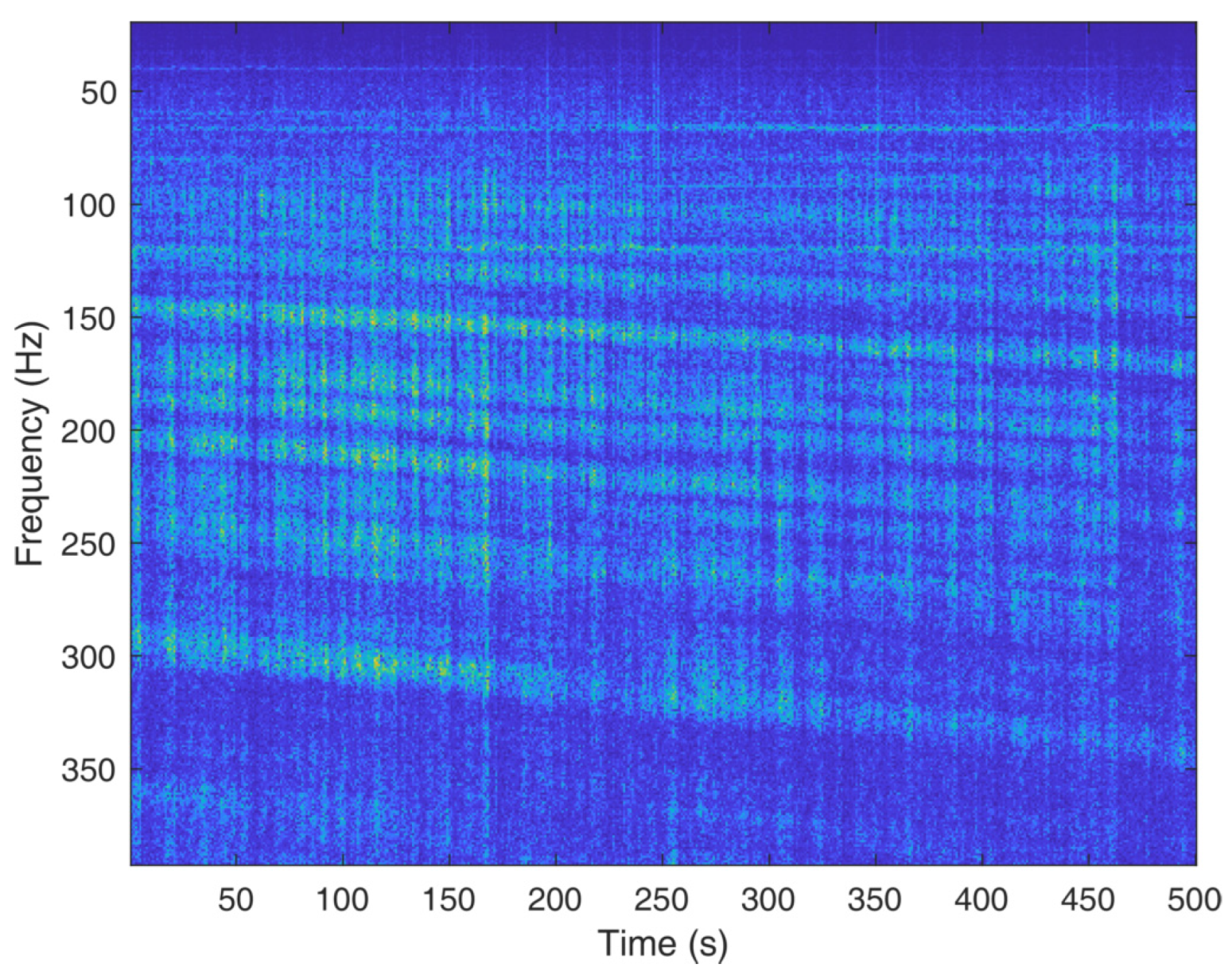
3.2. Experiments on Target Spectrum Reconstruction
3.3. Experiments on Underwater Target Classification
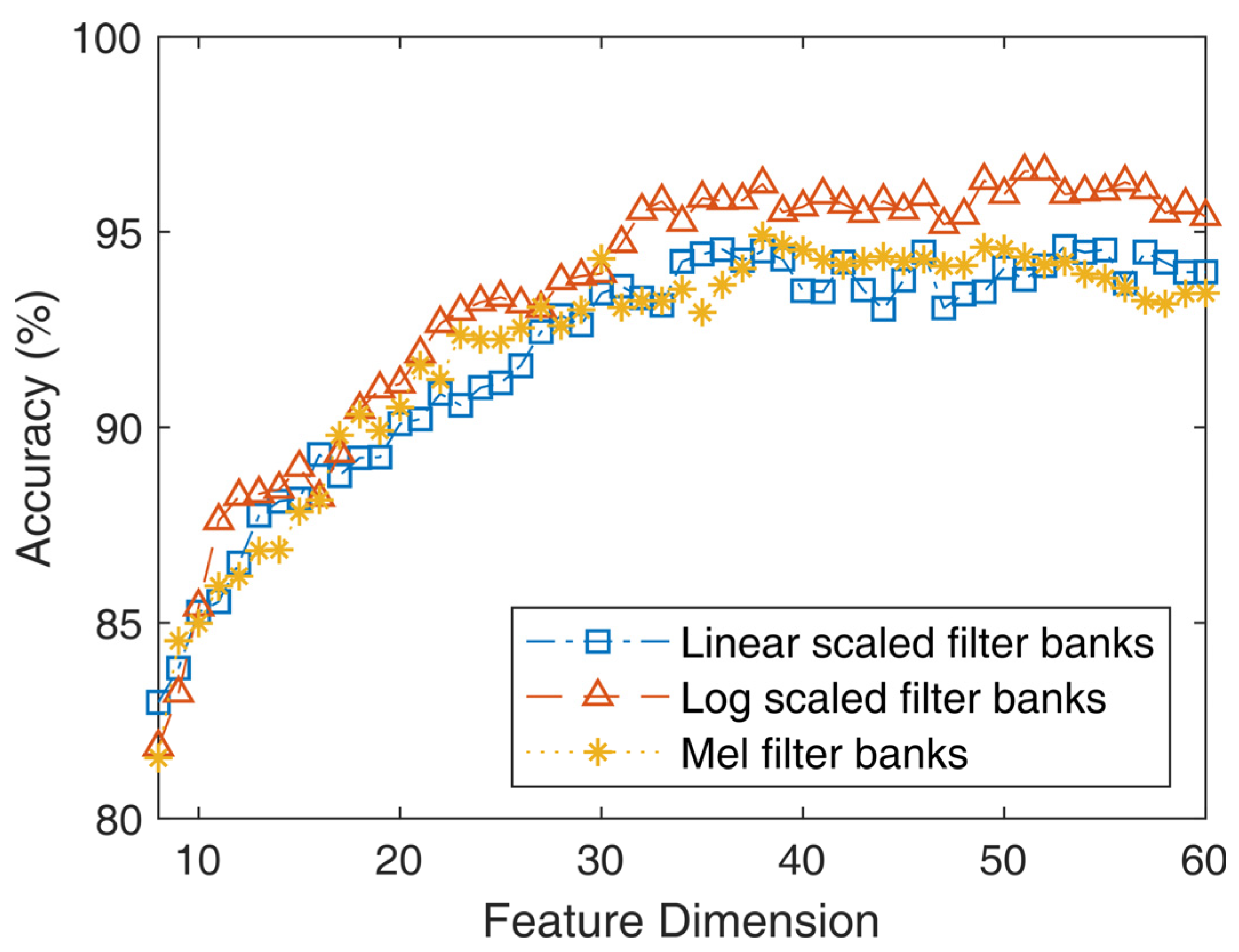
3.3.1. The Effect of Filter Bank Type on Classification Performance
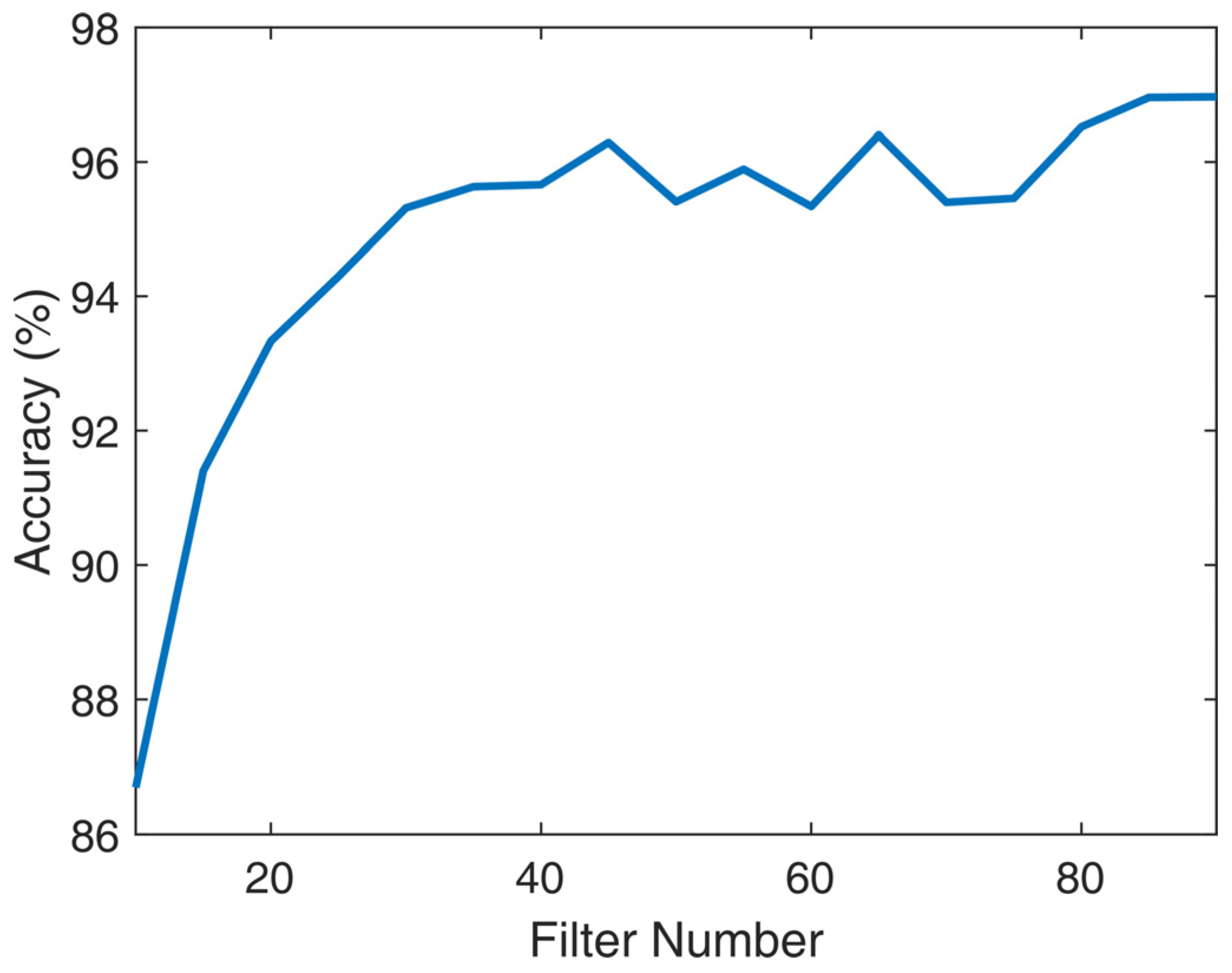
3.3.2. The Effect of Filter Number on Classification Performance
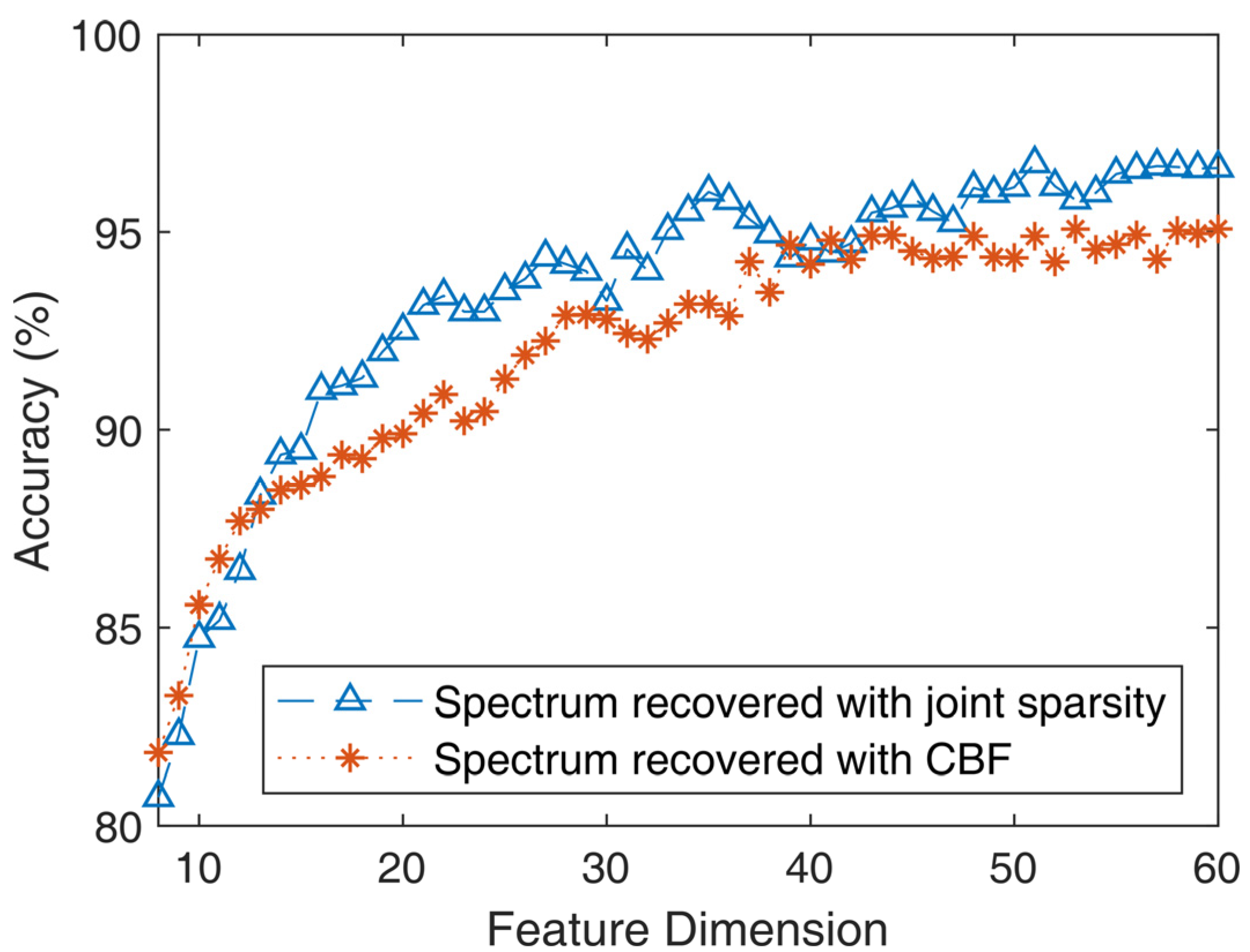
3.3.3. Comparison of Spectrum Reconstruction Methods on Classification Performance
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lei, Z.; Lei, X.; Wang, N. Present status and challenges of underwater acoustic target recognition technology: A review. Front. Phys. 2022, 10, 1018. [Google Scholar] [CrossRef]
- Fang, S.; Du, S.; Luo, X.; Han, N.; Xu, X. Development of underwater acoustic target feature analysis and recognition technology. Bull. Chin. Acad. Sci. 2019, 34, 297–305. [Google Scholar]
- Erol-Kantarci, M.; Mouftah, H.T.; Oktug, S. A survey of architectures and localization techniques for underwater acoustic sensor networks. IEEE Commun. Surv. Tutor. 2011, 13, 487–502. [Google Scholar] [CrossRef]
- Johnson, D.H.; Dudgeon, D.E. Array Signal Processing: Concepts and Techniques; Prentice Hall: Hoboken, NJ, USA, 1993. [Google Scholar]
- Nielsen, R.O. Sonar Signal Processing; Artech House, Inc.: Norwood, MA, USA, 1991. [Google Scholar]
- Lurton, X. An Introduction to Underwater Acoustics: Principles and Applications (Vol. 2); Springer: London, UK, 2002. [Google Scholar]
- Liu, W.; Weiss, S. Wideband Beamforming: Concepts and Techniques; Wiley: Chichester, UK, 2010. [Google Scholar] [CrossRef]
- Sun, S.; Wang, T.; Chu, F. A generalized minimax-concave penalty based compressive beamforming method for acoustic source identification. J. Sound Vib. 2021, 500, 116017. [Google Scholar] [CrossRef]
- Frank, A.; Ben-Kish, A.; Cohen, I. Constant-beamwidth linearly constrained minimum variance beamformer. In Proceedings of the 30th European Signal Processing Conference (EUSIPCO), Belgrade, Serbia 29 August–2 September 2022; IEEE: New York, NY, USA, 2022; pp. 50–54. [Google Scholar] [CrossRef]
- Feng, L.; Cui, G.; Yu, X.; Liu, R.; Lu, Q. Wideband frequency-invariant beamforming with dynamic range ratio constraints. Signal Process. 2021, 181, 107908. [Google Scholar] [CrossRef]
- Rosen, O.; Cohen, I.; Malah, D. FIR-based symmetrical acoustic beamformer with a constant beamwidth. Signal Process. 2017, 130, 365–376. [Google Scholar] [CrossRef]
- Liu, Z.; Huang, Z.; Zhou, Y. An efficient maximum likelihood method for direction-of-arrival estimation via sparse Bayesian learning. IEEE Trans. Wirel. Commun. 2012, 11, 1–11. [Google Scholar] [CrossRef]
- He, L.; Chen, H.; Carin, L. Tree-structured compressive sensing with variational Bayesian analysis. IEEE Signal Process. Lett. 2009, 17, 233–236. [Google Scholar] [CrossRef]
- Zhang, X.; Zheng, J.; Wang, D.; Tang, G.; Zhou, Z.; Lin, Z. Structured Sparsity Optimization with Non-Convex Surrogates of L20-Norm: A Unified Algorithmic Framework. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 6386–6402. [Google Scholar] [CrossRef]
- Yu, L.; Hong, S.; Jean-Pierre, B.; Gang, Z. Bayesian compressive sensing for cluster structured sparse signals. Signal Process. 2012, 92, 259–269. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, L.; Bi, G.; Wan, C.; Zhang, L.; Zhang, H. Novel wideband doa estimation based on sparse bayesian learning with dirichlet process priors. IEEE Trans. Signal Process. 2015, 64, 275–289. [Google Scholar] [CrossRef]
- Hu, N.; Sun, B.; Wang, J.; Yang, J. Covariance-based DOA estimation for wideband signals using joint sparse Bayesian learning. In Proceedings of the IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xiamen, China, 22–25 October 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Gemba, K.L.; Nannuru, S.; Gerstoft, P. Robust Ocean Acoustic Localization with Sparse Bayesian Learning. IEEE J. Sel. Top. Signal Process. 2019, 13, 49–60. [Google Scholar] [CrossRef]
- Zhao, L.; Li, X.; Wang, L.; Bi, G. Computationally efficient wide-band DOA estimation methods based on sparse Bayesian framework. IEEE Trans. Veh. Technol. 2017, 66, 11108–11121. [Google Scholar] [CrossRef]
- Zhang, Z. Photoplethysmography-based heart rate monitoring in physical activities via joint sparse spectrum reconstruction. IEEE Trans. Biomed. Eng. 2015, 62, 1902–1910. [Google Scholar] [CrossRef] [PubMed]
- Xenaki, A.; Jesper, B.B.; Mads, G.C. Sound source localization and speech enhancement with sparse Bayesian learning beamforming. J. Acoust. Soc. Am. 2018, 143, 3912–3921. [Google Scholar] [CrossRef]
- Ahmed, I.; Khan, A.; Ahmad, N. Speech signal recovery using block sparse Bayesian learning. Arab. J. Sci. Eng. 2020, 45, 1567–1579. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, L.; Yu, L.; Wang, J.; Bi, G. Structured Bayesian learning for recovery of clustered sparse signal. Signal Process. 2020, 166, 107255. [Google Scholar] [CrossRef]
- Wang, Q.; Zeng, X.; Wang, L. Passive moving target classification via spectra multiplication method. IEEE Signal Process. Lett. 2017, 24, 451–455. [Google Scholar] [CrossRef]
- Cipli, G.; Sattar, F.; Driessen, P.F. Multi-class acoustic event classification of hydrophone data. In Proceedings of the IEEE Pacific Rim Conference on Communications, Computers and Signal Processing (PACRIM), Victoria, BC, Canada, 24–26 August 2015; pp. 473–478. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, D.; Han, X.; Zhu, Z. Feature extraction of underwater target signal using mel frequency cepstrum coefficients based on acoustic vector sensor. J. Sensors 2016, 2016, 7864213. [Google Scholar] [CrossRef]
- Das, A.; Kumar, A.; Bahl, R. Marine vessel classification based on passive sonar data: The cepstrum-based approach. IET Radar Sonar Navig. 2013, 7, 87–93. [Google Scholar] [CrossRef]
- Beal, M.J. Variational Algorithms for Approximate Bayesian Inference; University of London, University College London: London, UK, 2003. [Google Scholar]
- Nakagawa, S.; Wang, L.; Ohtsuka, S. Speaker Identification and Verification by Combining MFCC and Phase Information. Audio, Speech, and Language Processing. IEEE Trans. 2012, 20, 1085–1095. [Google Scholar] [CrossRef]
- South, H.M.; Cronin, D.C.; Gordon, S.L.; Magnani, T.P. Technologies for sonar processing. Johns Hopkins APL Tech. Dig. 1998, 19, 459–469. [Google Scholar]
- Chang, C.C.; Lin, C.J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. (TIST) 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Mak, B. A mathematical relationship between full-band and multiband mel-frequency cepstral coefficients. IEEE Signal Process. Lett. 2002, 9, 241–244. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, C.; Zeng, X.; Wang, Q.; Wang, L.; Jin, A. Array-Based Underwater Acoustic Target Classification with Spectrum Reconstruction Based on Joint Sparsity and Frequency Shift Invariant Feature. J. Mar. Sci. Eng. 2023, 11, 1101. https://doi.org/10.3390/jmse11061101
Lu C, Zeng X, Wang Q, Wang L, Jin A. Array-Based Underwater Acoustic Target Classification with Spectrum Reconstruction Based on Joint Sparsity and Frequency Shift Invariant Feature. Journal of Marine Science and Engineering. 2023; 11(6):1101. https://doi.org/10.3390/jmse11061101
Chicago/Turabian StyleLu, Chenxiang, Xiangyang Zeng, Qiang Wang, Lu Wang, and Anqi Jin. 2023. "Array-Based Underwater Acoustic Target Classification with Spectrum Reconstruction Based on Joint Sparsity and Frequency Shift Invariant Feature" Journal of Marine Science and Engineering 11, no. 6: 1101. https://doi.org/10.3390/jmse11061101