

Analytical and Computational Modeling for Multi-Degree of Freedom Systems: Estimating the Likelihood of an FOWT Structural Failure


Abstract
:1. Introduction
2. Theoretical Background
2.1. Hydro-Servo-Aero-Elastic Analysis Using FAST
2.2. Hydrodynamics
2.3. Structural Dynamics
2.4. Dynamics of Control System
2.5. Aerodynamics
2.6. Multibody Simulation Using SIMPACK
3. System Description
3.1. DTU 10-MW RWT
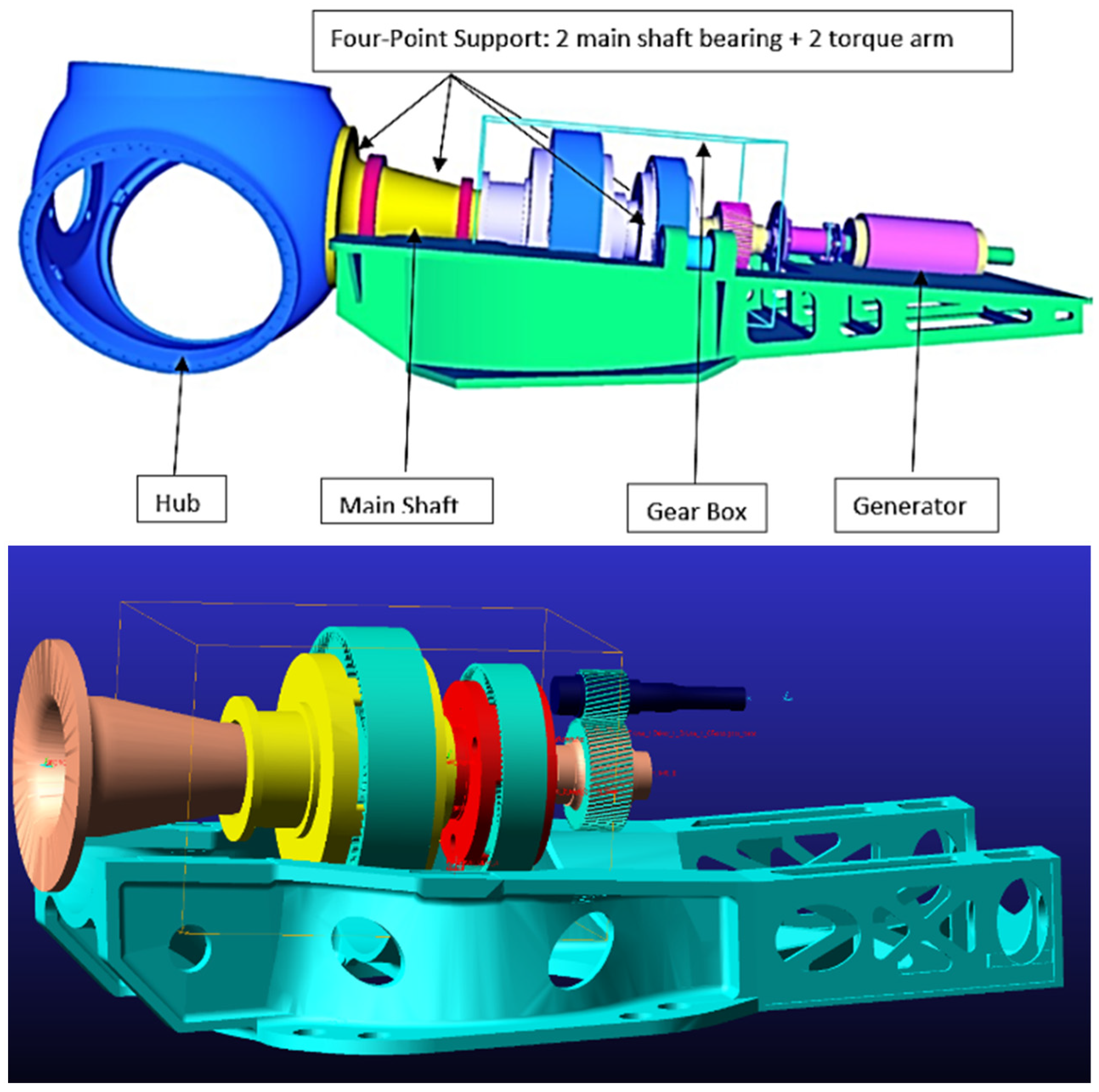
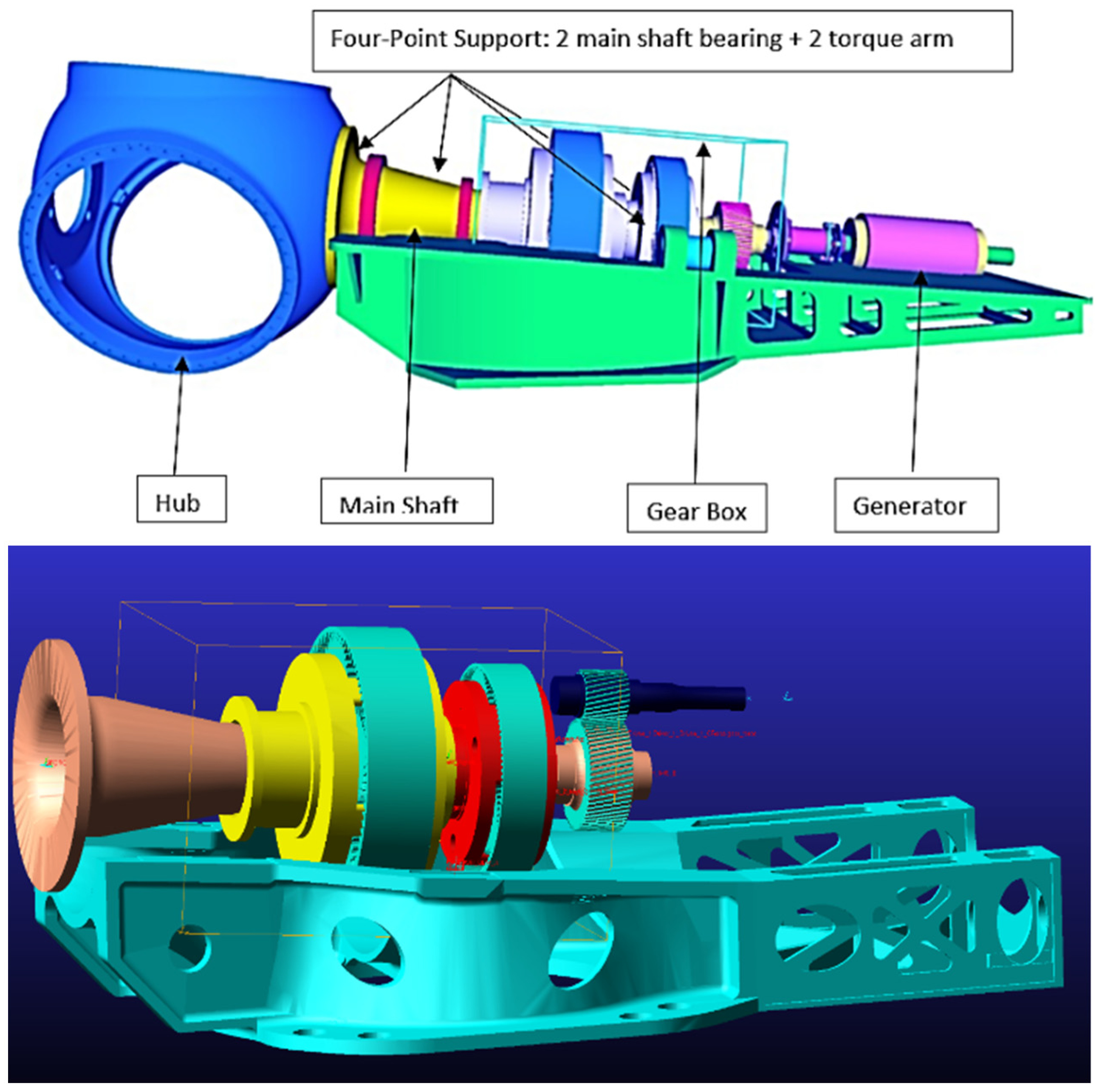
3.2. Drivetrain’s Design
3.3. Drivetrain Layout
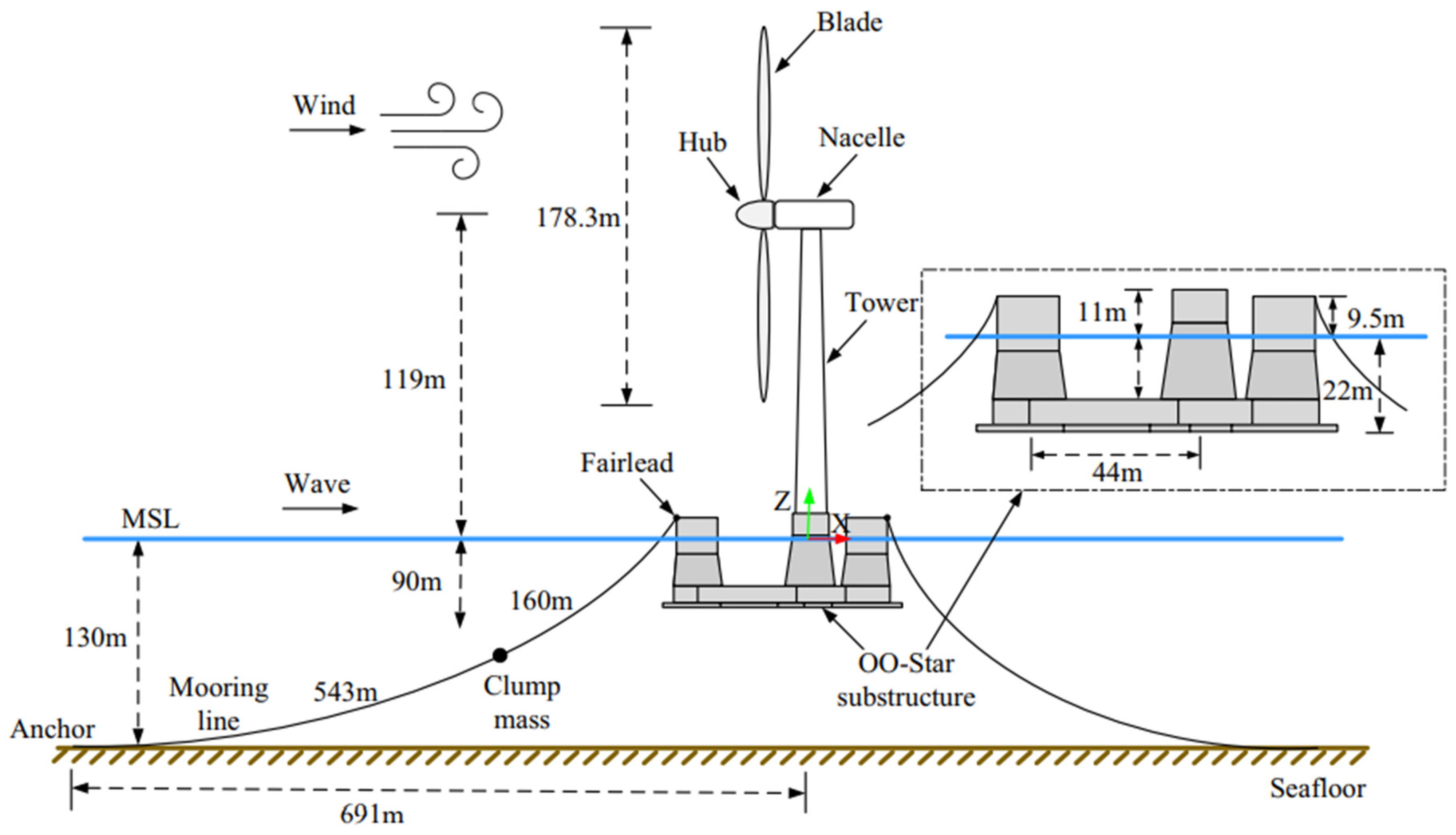
3.4. OO-Star Semi-Submersible FWT Floater with Mooring System
3.5. Load Cases and Environmental Conditions
- U(z): Wind speed at the level z
- Uref: Wind speed at the reference height
- Zref: Reference height
- α: Empirical wind–shear exponent
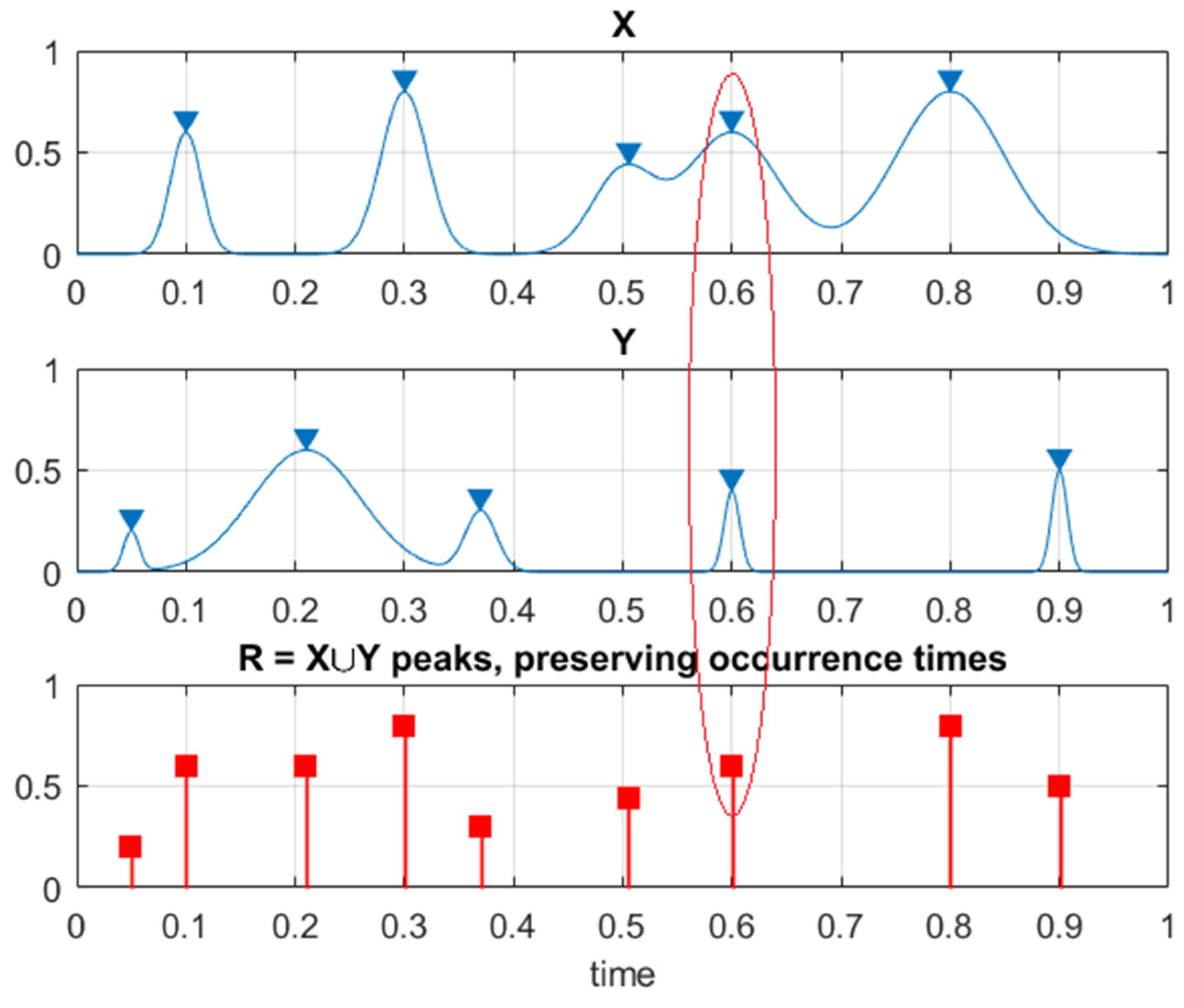
4. Novel Reliability Method
5. Failure Probability Estimation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- International Energy Agency. World Energy Outlook 2020; OECD Publishing: Paris, France, 2020. [Google Scholar]
- Veers, P.; Butterfield, S. Extreme load estimation for wind turbines-issues and opportunities for improved practice. In Proceedings of the 20th 2001 ASME Wind Energy Symposium, Reno, NV, USA, 11–14 January 2001; p. 44. [Google Scholar]
- Igba, J.; Alemzadeh, K.; Durugbo, C.; Henningsen, K. Performance assessment of wind turbine gearboxes using in-service data: Current approaches and future trends. Renew. Sustain. Energy Rev. 2015, 50, 144–159. [Google Scholar] [CrossRef] [Green Version]
- International Renewable Energy Agency (IRENA). Renewable Energy Technologies: Cost Analysis Series. Wind Power; IRENA: Abu Dhabi, United Arab Emirates, 2012. [Google Scholar]
- Sheng, S. Wind Turbine Gearbox Condition Monitoring Round Robin Study-Vibration Analysis; No. NREL/TP-5000-54530; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2012.
- O’Kelly, B.C.; Arshad, M. Offshore wind turbine foundations—Analysis and design. In Offshore Wind Farms; Woodhead Publishing: Sawston, UK, 2016; pp. 589–610. [Google Scholar]
- Barooni, M.; Ashuri, T.; Velioglu Sogut, D.; Wood, S.; Ghaderpour Taleghani, S. Floating Offshore Wind Turbines: Current Status and Future Prospects. Energies 2022, 16, 2. [Google Scholar] [CrossRef]
- Veers, P.S.; Winterstein, S.R. Application of measured loads to wind turbine fatigue and reliability analysis. J. Sol. Energy Eng. 1998, 120, 233–239. [Google Scholar] [CrossRef] [Green Version]
- Dimitrov, N. Comparative analysis of methods for modelling the short-term probability distribution of extreme wind turbine loads. Wind Energy 2016, 19, 717–737. [Google Scholar] [CrossRef]
- Madsen, P.; Pierce, K.; Buhl, M. Predicting ultimate loads for wind turbine design. In Proceedings of the 37th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 11–14 January 1999; p. 69. [Google Scholar]
- Ronold, K.O.; Wedel-Heinen, J.; Christensen, C.J. Reliability-based fatigue design of wind-turbine rotor blades. Eng. Struct. 1999, 21, 1101–1114. [Google Scholar] [CrossRef]
- Ronold, K.O.; Larsen, G.C. Reliability-based design of wind-turbine rotor blades against failure in ultimate loading. Eng. Struct. 2000, 22, 565–574. [Google Scholar] [CrossRef]
- Manuel, L.; Veers, P.S.; Winterstein, S.R. Parametric models for estimating wind turbine fatigue loads for design. J. Sol. Energy Eng. 2001, 123, 346–355. [Google Scholar] [CrossRef] [Green Version]
- Fitzwater, L.M.; Cornell, A.C. Predicting the long term distribution of extreme loads from limited duration data: Comparing full integration and approximate methods. J. Sol. Energy Eng. 2002, 124, 378–386. [Google Scholar] [CrossRef]
- Moriarty, P.J.; Holley, W.E.; Butterfield, S. Effect of turbulence variation on extreme loads prediction for wind turbines. J. Sol. Energy Eng. 2002, 124, 387–395. [Google Scholar] [CrossRef]
- Agarwal, P.; Manuel, L. Extreme loads for an offshore wind turbine using statistical extrapolation from limited field data. Wind. Energy Int. J. Prog. Appl. Wind Power Convers. Technol. 2008, 11, 673–684. [Google Scholar] [CrossRef] [Green Version]
- Barreto, D.; Karimirad, M.; Ortega, A. Effects of Simulation Length and Flexible Foundation on Long-Term Response Extrapolation of a Bottom-Fixed Offshore Wind Turbine. J. Offshore Mech. Arct. Eng. 2022, 144, 032001. [Google Scholar] [CrossRef]
- McCluskey, C.J.; Guers, M.J.; Conlon, S.C. Minimum sample size for extreme value statistics of flow-induced response. Mar. Struct. 2021, 79, 103048. [Google Scholar] [CrossRef]
- Fogle, J.; Agarwal, P.; Manuel, L. Towards an improved understanding of statistical extrapolation for wind turbine extreme loads. Wind. Energy Int. J. Prog. Appl. Wind Power Convers. Technol. 2008, 11, 613–635. [Google Scholar]
- Ernst, B.; Seume, J.R. Investigation of site-specific wind field parameters and their effect on loads of offshore wind turbines. Energies 2012, 5, 3835–3855. [Google Scholar] [CrossRef] [Green Version]
- Graf, P.A.; Stewart, G.; Lackner, M.; Dykes, K.; Veers, P. High-throughput computation and the applicability of Monte Carlo integration in fatigue load estimation of floating offshore wind turbines. Wind Energy 2016, 19, 861–872. [Google Scholar] [CrossRef]
- Fitzwater, L.M.; Winterstein, S.R. Predicting design wind turbine loads from limited data: Comparing random process and random peak models. J. Sol. Energy Eng. 2001, 123, 364–371. [Google Scholar] [CrossRef] [Green Version]
- Moriarty, P.J.; Holley, W.E.; Butterfield, S.P. Extrapolation of Extreme and Fatigue Loads Using Probabilistic Methods; No. NREL/TP-500-34421; National Renewable Energy Laboartory (NREL): Golden, CO, USA, 2004.
- Freudenreich, K.; Argyriadis, K. The load level of modern wind turbines according to IEC 61400-1. J. Phys. Conf. Ser. 2007, 75, 012075. [Google Scholar] [CrossRef]
- Ragan, P.; Manuel, L. Statistical extrapolation methods for estimating wind turbine extreme loads. J. Sol. Energy Eng. 2008, 130, 031011. [Google Scholar] [CrossRef]
- Peeringa, J.M. Comparison of Extreme Load Extrapolations Using Measured and Calculated Loads of a MW Wind Turbine; ECN: Petten, The Netherlands, 2009. [Google Scholar]
- Abdallah, I. Assessment of Extreme Design Loads for Modern Wind Turbines Using the Probabilistic Approach. Ph.D. Thesis, Technical University of Denmark, Roskilde, Denmark, 2015. [Google Scholar]
- Stewart, G.M.; Lackner, M.A.; Arwade, S.R.; Hallowell, S.; Myers, A.T. Statistical Estimation of Extreme Loads for the Design of Offshore Wind Turbines During Non-Operational Conditions. Wind Eng. 2015, 39, 629–640. [Google Scholar] [CrossRef]
- Gaidai, O.; Wang, F.; Wu, Y.; Xing, Y.; Medina, A.; Wang, J. Offshore renewable energy site correlated wind-wave statistics. Probabilistic Eng. Mech. 2022, 68, 103207. [Google Scholar] [CrossRef]
- Gaidai, O.; Storhaug, G.; Næss, A. Statistics of extreme hydroelastic response for large ships. Mar. Struct. 2019, 61, 142–154. [Google Scholar] [CrossRef]
- Xu, X.; Xing, Y.; Gaidai, O.; Wang, K.; Patel, K.; Dou, P.; Zhang, Z. A novel multi-dimensional reliability approach for floating wind turbines under power production conditions. Front. Mar. Sci. 2022, 9, 970081. [Google Scholar] [CrossRef]
- Gaidai, O.; Xing, Y.; Balakrishna, R. Improving extreme response prediction of a subsea shuttle tanker hovering in ocean current using an alternative highly correlated response signal. Results Eng. 2022, 15, 100593. [Google Scholar] [CrossRef]
- Cheng, Y.; Gaidai, O.; Yurchenko, D.; Xu, X.; Gao, S. Study on the Dynamics of a Payload Influence in the Polar Ship. In Proceedings of the 32nd International Ocean and Polar Engineering Conference, Shanghai, China, 6–10 June 2022. Paper Number ISOPE-I-22-342. [Google Scholar]
- Available online: https://seklima.met.no/ (accessed on 1 January 2023).
- Gaidai, O.; Fu, S.; Xing, Y. Novel reliability method for multidimensional nonlinear dynamic systems. Mar. Struct. 2022, 86, 103278. [Google Scholar] [CrossRef]
- Gaidai, O.; Yan, P.; Xing, Y. A novel method for prediction of extreme wind speeds across parts of Southern Norway. Front. Environ. Sci. 2022, 10, 997216. [Google Scholar] [CrossRef]
- Gaidai, O.; Yan, P.; Xing, Y. Prediction of extreme cargo ship panel stresses by using deconvolution. Front. Mech. Eng. 2022, 8, 992177. [Google Scholar] [CrossRef]
- Falzarano, J.; Su, Z.; Jamnongpipatkul, A. Application of stochastic dynamical system to nonlinear ship rolling problems. In Proceedings of the 11th International Conference on the Stability of Ships and Ocean Vehicles, Athens, Greece, 23–28 September 2012. [Google Scholar]
- Gaidai, O.; Xu, J.; Yan, P.; Xing, Y.; Zhang, F.; Wu, Y. Novel methods for wind speeds prediction across multiple locations. Sci. Rep. 2022, 12, 19614. [Google Scholar] [CrossRef]
- Gaidai, O.; Xing, Y. Novel reliability method validation for offshore structural dynamic response. Ocean Eng. 2022, 266, 113016. [Google Scholar] [CrossRef]
- Gaidai, O.; Wu, Y.; Yegorov, I.; Alevras, P.; Wang, J.; Yurchenko, D. Improving performance of a nonlinear absorber applied to a variable length pendulum using surrogate optimization. J. Vib. Control 2022, 10775463221142663. [Google Scholar] [CrossRef]
- Gaidai, O.; Wang, K.; Wang, F.; Xing, Y.; Yan, P. Cargo ship aft panel stresses prediction by deconvolution. Mar. Struct. 2022, 88, 103359. [Google Scholar] [CrossRef]
- Gaidai, O.; Xu, J.; Xing, Y.; Hu, Q.; Storhaug, G.; Xu, X.; Sun, J. Cargo vessel coupled deck panel stresses reliability study. Ocean Eng. 2023, 268, 113318. [Google Scholar] [CrossRef]
- Gaidai, O.; Xing, Y. A Novel Multi Regional Reliability Method for COVID-19 Death Forecast. Eng. Sci. 2022, 21, 799. [Google Scholar] [CrossRef]
- Gaidai, O.; Xing, Y. A novel bio-system reliability approach for multi-state COVID-19 epidemic forecast. Eng. Sci. 2022, 21, 797. [Google Scholar] [CrossRef]
- Gaidai, O.; Yan, P.; Xing, Y. Future world cancer death rate prediction. Sci. Rep. 2023, 13, 303. [Google Scholar] [CrossRef] [PubMed]
- Gaidai, O.; Xu, J.; Hu, Q.; Xing, Y.; Zhang, F. Offshore tethered platform springing response statistics. Sci. Rep. 2022, 12, 21182. [Google Scholar] [CrossRef]
- Gaidai, O.; Xing, Y.; Xu, X. Novel methods for coupled prediction of extreme wind speeds and wave heights. Sci. Rep. 2023, 13, 1119. [Google Scholar] [CrossRef]
- Gaidai, O.; Cao, Y.; Xing, Y.; Wang, J. Piezoelectric Energy Harvester Response Statistics. Micromachines 2023, 14, 271. [Google Scholar] [CrossRef]
- Gaidai, O.; Cao, Y.; Loginov, S. Global cardiovascular diseases death rate prediction. Curr. Probl. Cardiol. 2023, 48, 101622. [Google Scholar] [CrossRef]
- Gaidai, O.; Cao, Y.; Xing, Y.; Balakrishna, R. Extreme springing response statistics of a tethered platform by deconvolution. Int. J. Nav. Archit. Ocean Eng. 2023, 15, 100515. [Google Scholar] [CrossRef]
- Gaidai, O.; Xing, Y.; Balakrishna, R.; Xu, J. Improving extreme offshore wind speed prediction by using deconvolution. Heliyon 2023, 9, e13533. [Google Scholar] [CrossRef]
- Gaidai, O.; Xing, Y. Prediction of death rates for cardiovascular diseases and cancers. Cancer Innov. 2023, 2, 140–147. [Google Scholar] [CrossRef]
- Xu, Y.; Øiseth, O.; Moan, T.; Naess, A. Prediction of long-term extreme load effects due to wave and wind actions for cable-supported bridges with floating pylons. Eng. Struct. 2018, 172, 321–333. [Google Scholar] [CrossRef]
- Gaspar, B.; Naess, A.; Leira, B.; Soares, C. System reliability analysis of a stiffened panel under combined uniaxial compression and lateral pressure loads. Struct. Saf. 2012, 39, 30–43. [Google Scholar] [CrossRef]
- Naess, A.; Stansberg, C.; Gaidai, O.; Baarholm, R. Statistics of extreme events in airgap measurements. J. Offshore Mech. Arct. Eng. 2009, 131, 733–742. [Google Scholar] [CrossRef]
- Xu, X.; Gaidai, O.; Yakimov, V.; Xing, Y.; Wang, F. FPSO offloading operational safety study by a multidimensional reliability method. Ocean Eng. 2023, 281, 114652. [Google Scholar] [CrossRef]
- Gaidai, O.; Xing, Y. COVID-19 Epidemic Forecast in Brazil. Bioinform. Biol. Insights 2023, 17, 11779322231161939. [Google Scholar] [CrossRef]
- Gaidai, O.; Wang, F.; Xing, Y.; Balakrishna, R. Novel Reliability Method Validation for Floating Wind Turbines. Adv. Energy Sustain. Res. 2023, 2200177. [Google Scholar] [CrossRef]
- Gaidai, O.; Hu, Q.; Xu, J.; Wang, F.; Cao, Y. Carbon Storage Tanker Lifetime Assessment. Glob. Chall. 2023, 2300011. [Google Scholar] [CrossRef]
- Liu, Z.; Gaidai, O.; Xing, Y.; Sun, J. Deconvolution approach for floating wind turbines. Energy Sci. Eng. 2023, 1–9. [Google Scholar] [CrossRef]
- Gaidai, O.; Yurchenko, D.; Ye, R.; Xu, X.; Wang, J. Offshore crane non-linear stochastic response: Novel design and extreme response by a path integration. Ships Offshore Struct. 2022, 17, 1294–1300. [Google Scholar] [CrossRef]
- Gaidai, O.; Yan, P.; Xing, Y.; Xu, J.; Zhang, F.; Wu, Y. Oil tanker under ice loadings. Sci. Rep. 2023, 13, 8670. [Google Scholar] [CrossRef]
- Gaidai, O.; Xing, Y.; Xu, J.; Balakrishna, R. Gaidai-Xing reliability method validation for 10-MW floating wind turbines. Sci. Rep. 2023, 13, 8691. [Google Scholar] [CrossRef] [PubMed]
- Naess, A.; Gaidai, O.; Teigen, P. Extreme response prediction for nonlinear floating offshore structures by Monte Carlo simulation. Appl. Ocean. Res. 2007, 29, 221–230. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Values |
|---|---|
| Rating | 10 MW |
| Rotor orientation and its configuration | Upwind and 3 blades |
| Rotor and hub diameters | 178.3 m, 5.6 m |
| FWT hub height | 119 m |
| Cut-in, rated, and cut-out wind-speed | 4.0 m/s, 11.4 m/s, 25.0 m/s |
| Cut-in, rated rotor speed | 6.0 RPM, 9.6 RPM |
| FWT-rated tip speed | 90 m/s |
| Overhang, shaft tilt, pre-cone | 7.07 m, 5°, 2.5° |
| Rotor mass | 229 tons (each blade ~41 tons) |
| FWT nacelle mass | 446 tons |
| Tower mass | 605 tons |
| Parameters | Values |
|---|---|
| FWT gearbox ratio | 1:50 |
| Minimum rotor speed (rpm) | 6.0 |
| Rated rotor speed (rpm) | 9.6 |
| Rated generator speed (rpm) | 480.0 |
| Electrical generator efficiency | 94.0 |
| Generator inertia about high-speed shaft (kg·m2) | 1500.5 |
| Free–free rigid shaft torsion mode natural frequency | 4.0 |
| Free–fixed rigid shaft torsion mode natural frequency | 0.6 |
| Load Cases | Samples | Simulation Length (hours) | ||||
|---|---|---|---|---|---|---|
| LC1 | 8 | 0.1740 | 1.9 | 9.7 | 24 | 1 |
| LC2 | 12 | 0.1460 | 2.5 | 10.1 | 24 | 1 |
| LC3 | 16 | 0.1320 | 3.2 | 10.7 | 24 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gaidai, O.; Xu, J.; Yakimov, V.; Wang, F. Analytical and Computational Modeling for Multi-Degree of Freedom Systems: Estimating the Likelihood of an FOWT Structural Failure. J. Mar. Sci. Eng. 2023, 11, 1237. https://doi.org/10.3390/jmse11061237
Gaidai O, Xu J, Yakimov V, Wang F. Analytical and Computational Modeling for Multi-Degree of Freedom Systems: Estimating the Likelihood of an FOWT Structural Failure. Journal of Marine Science and Engineering. 2023; 11(6):1237. https://doi.org/10.3390/jmse11061237
Chicago/Turabian StyleGaidai, Oleg, Jingxiang Xu, Vladimir Yakimov, and Fang Wang. 2023. "Analytical and Computational Modeling for Multi-Degree of Freedom Systems: Estimating the Likelihood of an FOWT Structural Failure" Journal of Marine Science and Engineering 11, no. 6: 1237. https://doi.org/10.3390/jmse11061237