
Optimal Path Planning Method for Unmanned Surface Vehicles Based on Improved Shark-Inspired Algorithm


Abstract
:1. Introduction
- Aiming at insufficient search ability caused by uneven population distribution of the WSO, the white shark population is initialized by using circle chaotic mapping to enrich the diversity and enhance the initial solution quality of the algorithm.
- In the proposed IWSO, the adaptive weight factor is utilized to refresh the best white shark’s location to balance the exploration and exploitation capacity.
- To address the issue that the WSO slips into the regional optimum easily in the later iteration, the simplex method is used to update the other white sharks’ movement position toward the best white shark, which increases the probability of breaking out the local optimum.
- An innovative fusion method known as the IWSO-DWA algorithm is created by combining the improved WSO with the enhanced DWA. The proposed IWSO-DWA can not only plan a global optimal path of navigation in an intricate marine environment, but also can help USV avoid the other ships dynamically in real time and meet the COLREGs.
2. White Shark Optimizer and Its Improvement
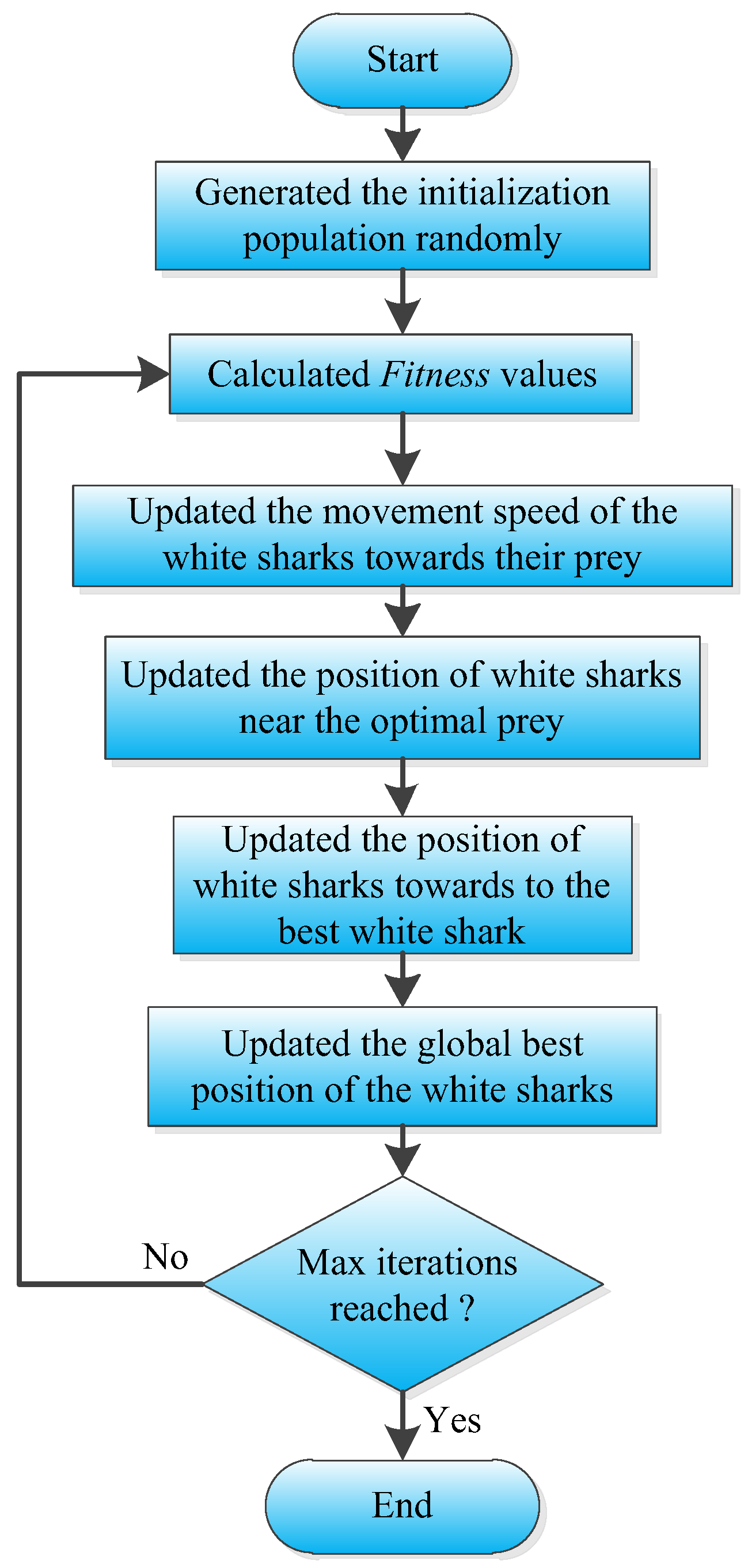
2.1. Traditional White Shark Optimizer (WSO)
- Since the white shark’s initialization population is created randomly, it is prone to problems such as uneven population distribution, poor diversity and low quality of the initial solution, which will not only decelerate the convergence, but also may fall into local optimum.
- Since white sharks hunt for prey amid the ocean’s depths randomly, they may not be close enough to the optimal prey, which will lead to an imbalance in both exploration and exploitation capacity.
- In the fish school behavior, other white sharks’ position may not be optimal to the best white shark, which will slip into the regional optimum easily.
2.2. Improved White Shark Optimizer (IWSO)
- Considering the shortcomings of the WSO, such as uneven distribution and insufficient diversity of the population, a circle chaotic mapping algorithm is used to initialize the white shark population, thus further improving the quality of the initial solution.
- To address the imbalance of exploration and exploitation capacity, the adaptive weight factor method is utilized to update the best white shark’s position so that it can strengthen the balance between the exploration and exploitation capability.
- To deal with the issue that the WSO slips into the regional optimum easily, the simplex method is utilized to update the other great white sharks’ position near the best white shark to increase the possibility of the algorithm escaping the local region.
2.2.1. Circle Chaotic Mapping
2.2.2. Adaptive Weight Factor
2.2.3. Simplex Method
2.2.4. Performance of IWSO on IEEE CEC-2005
3. Dynamic Window Approach and Its Improvement
3.1. USV Modeling
- USV is considered a rigid body with uniform mass distribution and no geometric deformation.
- The roll, pitch and heave motions of USV can be ignored.
- The xz-plane of USV is symmetrical, and the center of mass lies in the geometric symmetry plane.
- During the voyage of USV, the temporal and spatial variability of ocean currents and wind in the selected area is considered to be quasi-static.
3.2. Velocity Sampling
- Speed constraint: limited by the USV’s maximal and minimal velocity:
- 2.
- Dynamic constraint: influenced by the motor acceleration and deceleration performance of USV, which is expressed as follows:
- 3.
- Braking distance constraint: To prevent the USV from colliding with other ships or obstacles, the USV will be constrained by the braking distance, and the speed will be reduced to zero within the braking distance according to its maximum deceleration. The braking distance constraint is presented in the following formula:
3.3. Evaluation Function and Its Improvement
4. The Proposed Fusion Algorithm IWSO-DWA
| Algorithm 1: IWSO-DWA |
| Input: The set of population size: P; The map information: G; The maximum number of iterations: . Output: Optimal navigation path. 1. Initializing population by circle chaotic mapping; 2. While k < K do 3. Updating the parameters of WSO; 4. Identifying the current optimal solution; 5. for i = 1 to P do 6. Updating the motion velocity of white sharks; 7. end for 8. for i = 1 to P do 9. Refreshing the best white shark’s location by the adaptive weight factor; 10. end for 11. for i = 1 to P do 12. If rand ss then 13. ; 14. If i ==1 then 15. ; 16. else 17. ; 18. ; 19. end if 20. end if 21. Using the simplex method to update the white sharks’ position; 22. end for 23. Modifying the position of any white shark that exceeds the boundary; 24. Assessing and revising the updated positions; 25. k = k + 1; 26. end while 27. Obtaining the optimal path globally and incorporating it into DWA; 28. Considering the COLREGs rules; 29. return optimal navigation path. |
4.1. COLREGs Rules
4.2. Complexity Analysis
5. Experimental Results and Analysis
5.1. Environment Modeling
5.2. Static Path Planning Simulation Experiment
5.3. Dynamic Avoidance Simulation Experiment
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bai, X.; Li, B.; Xu, X.; Xiao, Y. A Review of Current Research and Advances in Unmanned Surface Vehicles. J. Mar. Sci. Appl. 2022, 21, 47–58. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, S.; Wen, Y.; Du, Z.; Xiao, C.; Huang, L.; Zhu, M. The review unmanned surface vehicle path planning: Based on multi-modality constraint. Ocean Eng. 2020, 200, 107043. [Google Scholar] [CrossRef]
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D. Towards use of Dijkstra Algorithm for Optimal Navigation of an Unmanned Surface Vehicle in a Real-Time Marine Environment with results from Artificial Potential Field. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2018, 12, 125–131. [Google Scholar] [CrossRef]
- Song, R.; Liu, Y.; Bucknall, R. Smoothed A* algorithm for practical unmanned surface vehicle path planning. Appl. Ocean Res. 2019, 83, 9–20. [Google Scholar] [CrossRef]
- Guo, X.; Ji, M.; Zhao, Z.; Wen, D.; Zhang, W. Global path planning and multi-objective path control for unmanned surface vehicle based on modified particle swarm optimization (PSO) algorithm. Ocean Eng. 2020, 216, 107693. [Google Scholar] [CrossRef]
- Cui, Y.; Ren, J.; Zhang, Y. Path Planning Algorithm for Unmanned Surface Vehicle Based on Optimized Ant Colony Algorithm. IEEJ Trans. Electr. Electron. Eng. 2022, 17, 1027–1037. [Google Scholar] [CrossRef]
- Ma, Y.; Hu, M.; Yan, X. Multi-objective path planning for unmanned surface vehicle with currents effects. ISA Trans. 2018, 75, 137–156. [Google Scholar] [CrossRef]
- Sahoo, S.P.; Das, B.; Pati, B.B.; Garcia Marquez, F.P.; Segovia Ramirez, I. Hybrid Path Planning Using a Bionic-Inspired Optimization Algorithm for Autonomous Underwater Vehicles. J. Mar. Sci. Eng. 2023, 11, 761. [Google Scholar] [CrossRef]
- Qiyong, G.; Rong, Z.; Jialun, L.; Chen, L. An improved RRT algorithm based on prior AIS information and DP compression for ship path planning. Ocean Eng. 2023, 279, 114595. [Google Scholar] [CrossRef]
- Ma, D.; Hao, S.; Ma, W.; Zheng, H.; Xu, X. An optimal control-based path planning method for unmanned surface vehicles in complex environments. Ocean Eng. 2022, 245, 110532. [Google Scholar] [CrossRef]
- Han, S.; Wang, L.; Wang, Y.; He, H. A dynamically hybrid path planning for unmanned surface vehicles based on non-uniform Theta* and improved dynamic windows approach. Ocean Eng. 2022, 257, 111655. [Google Scholar] [CrossRef]
- Wang, W.; Du, J.; Tao, Y. A dynamic collision avoidance solution scheme of unmanned surface vessels based on proactive velocity obstacle and set-based guidance. Ocean Eng. 2022, 248, 110794. [Google Scholar]
- Hu, S.; Tian, S.; Zhao, J.; Shen, R. Path Planning of an Unmanned Surface Vessel Based on the Improved A-Star and Dynamic Window Method. J. Mar. Sci. Eng. 2023, 11, 1060. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Paik, J.K. Global-local hierarchical path planning scheme for unmanned surface vehicles under dynamically unforeseen environments. Ocean Eng. 2023, 280, 114750. [Google Scholar] [CrossRef]
- Li, M.; Li, B.; Qi, Z.; Li, J.; Wu, J. Optimized APF-ACO Algorithm for Ship Collision Avoidance and Path Planning. J. Mar. Sci. Eng. 2023, 11, 1177. [Google Scholar] [CrossRef]
- Bing, H.; He, D.; Zheping, Y. A path planning approach for unmanned surface vehicles based on dynamic and fast Q-learning. Ocean Eng. 2023, 270, 113632. [Google Scholar] [CrossRef]
- Guo, S.; Zhang, X.; Zheng, Y.; Du, Y. An Autonomous Path Planning Model for Unmanned Ships Based on Deep Reinforcement Learning. Sensors 2020, 20, 426. [Google Scholar] [CrossRef] [Green Version]
- Sang, H.; You, Y.; Sun, X.; Zhou, Y.; Liu, F. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations. Ocean Eng. 2021, 223, 108709. [Google Scholar] [CrossRef]
- Arora, S. Butterfly optimization algorithm: A novel approach for global optimization. Soft Comput. 2019, 23, 715–734. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Zhao, W.; Zhang, Z.; Wang, L. Manta ray foraging optimization: An effective bio-inspired optimizer for engineering applications. Eng. Appl. Artif. Intell. 2020, 87, 103300. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Braik, M.; Hammouri, A.; Atwan, J.; Al-Betar, M.A.; Awadallah, M.A. White Shark Optimizer: A novel bio-inspired meta-heuristic algorithm for global optimization problems. Knowl.-Based Syst. 2022, 243, 108457. [Google Scholar] [CrossRef]
- Hu, S.; Liu, H.; Feng, Y.; Cui, C.; Ma, Y.; Zhang, G.; Huang, X. Tool Wear Prediction in Glass Fiber Reinforced Polymer Small-Hole Drilling Based on an Improved Circle Chaotic Mapping Grey Wolf Algorithm for BP Neural Network. Appl. Sci. 2023, 13, 2811. [Google Scholar] [CrossRef]
- Nelder, J.A.; Mead, R. A Simplex Method for Function Minimization. Comput. J. 1965, 4, 308–313. [Google Scholar] [CrossRef]
- Zhou, L.; Zhou, X.; Yi, C. A Hybrid STA Based on Nelder–Mead Simplex Search and Quadratic Interpolation. Electronics 2023, 12, 994. [Google Scholar] [CrossRef]
- Vu, M.T.; Van, M.; Bui, D.H.P.; Do, Q.T.; Huynh, T.-T.; Lee, S.-D.; Choi, H.-S. Study on Dynamic Behavior of Unmanned Surface Vehicle-Linked Unmanned Underwater Vehicle System for Underwater Exploration. Sensors 2020, 20, 1329. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Yao, J.; He, D.; Chen, J.; Guo, J. Global Dynamic Path Planning Fusion Algorithm Combining Jump-A* Algorithm and Dynamic Window Approach. IEEE Access 2021, 9, 19632–19638. [Google Scholar] [CrossRef]
- Gu, N.; Wang, D.; Peng, Z.; Wang, J.; Han, Q.-L. Advances in Line-of-Sight Guidance for Path Following of Autonomous Marine Vehicles: An Overview. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 12–28. [Google Scholar] [CrossRef]
- Liu, L.; Liang, J.; Guo, K.; Ke, C.; He, D.; Chen, J. Dynamic Path Planning of Mobile Robot Based on Improved Sparrow Search Algorithm. Biomimetics 2023, 8, 182. [Google Scholar] [CrossRef] [PubMed]
- Sun, X.; Wang, G.; Fan, Y.; Mu, D. Collision avoidance control for unmanned surface vehicle with COLREGs compliance. Ocean Eng. 2023, 267, 113263. [Google Scholar] [CrossRef]
- Woo, J.; Kim, N. Collision avoidance for an unmanned surface vehicle using deep reinforcement learning. Ocean Eng. 2020, 199, 107001. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | BOA | GWO | MRFO | WOA | SSA | WSO | IWSO | |
|---|---|---|---|---|---|---|---|---|
| F1 | Best | 9.16 × 10−6 | 7.19 × 10−20 | 2.40 × 10−269 | 2.20 × 10−55 | 0.00 × 100 | 7.21 × 101 | 0.00 × 100 |
| Worst | 2.99 × 10−5 | 7.00 × 10−18 | 2.73 × 10−255 | 8.42 × 10−49 | 2.26 × 10−175 | 3.75 × 102 | 0.00 × 100 | |
| Mean | 2.00 × 10−5 | 1.80 × 10−18 | 1.20 × 10−256 | 3.44 × 10−50 | 9.03 × 10−177 | 2.25 × 102 | 0.00 × 100 | |
| Std | 5.34 × 10−6 | 1.85 × 10−18 | 0.00 × 100 | 1.68 × 10−49 | 0.00 × 100 | 7.07 × 101 | 0.00 × 100 | |
| F2 | Best | 1.85 × 10−8 | 8.05 × 10−12 | 1.14 × 10−136 | 1.40 × 10−35 | 0.00 × 100 | 2.78 × 100 | 0.00 × 100 |
| Worst | 5.21 × 10−1 | 6.99 × 10−11 | 5.96 × 10−127 | 1.04 × 10−31 | 2.31 × 10−61 | 7.02 × 100 | 0.00 × 100 | |
| Mean | 5.52 × 10−2 | 1.75 × 10−11 | 2.71 × 10−128 | 1.28 × 10−32 | 9.24 × 10−63 | 4.94 × 100 | 0.00 × 100 | |
| Std | 1.31 × 10−1 | 1.27 × 10−11 | 1.19 × 10−127 | 2.66 × 10−32 | 4.62 × 10−62 | 1.17 × 100 | 0.00 × 100 | |
| F3 | Best | 8.23 × 10−6 | 1.17 × 10−5 | 4.60 × 10−261 | 2.10 × 104 | 0.00 × 100 | 3.76 × 102 | 0.00 × 100 |
| Worst | 2.74 × 10−5 | 2.66 × 10−2 | 7.44 × 10−245 | 6.91 × 104 | 5.76 × 10−121 | 1.42 × 103 | 0.00 × 100 | |
| Mean | 1.81 × 10−5 | 2.73 × 10−3 | 6.66 × 10−246 | 4.73 × 104 | 2.31 × 10−122 | 8.60 × 102 | 0.00 × 100 | |
| Std | 4.48 × 10−6 | 5.69 × 10−3 | 0.00 × 100 | 1.27 × 104 | 1.15 × 10−121 | 2.75 × 102 | 0.00 × 100 | |
| F4 | Best | 1.14 × 10−3 | 1.54 × 10−5 | 1.10 × 10−136 | 3.57 × 10−2 | 0.00 × 100 | 6.73 × 100 | 0.00 × 100 |
| Worst | 2.66 × 10−3 | 2.81 × 10−4 | 7.69 × 10−122 | 8.50 × 101 | 8.76 × 10−97 | 1.17 × 101 | 0.00 × 100 | |
| Mean | 1.81 × 10−3 | 8.91 × 10−5 | 3.25 × 10−123 | 4.22 × 101 | 3.51 × 10−98 | 9.04 × 100 | 0.00 × 100 | |
| Std | 3.89 × 10−4 | 5.82 × 10−5 | 1.54 × 10−122 | 2.65 × 101 | 1.75 × 10−97 | 1.35 × 100 | 0.00 × 100 | |
| F5 | Best | 2.88 × 101 | 2.57 × 101 | 2.21 × 101 | 2.76 × 101 | 2.35 × 10−9 | 8.02 × 102 | 2.87 × 10−7 |
| Worst | 2.89 × 101 | 2.87 × 101 | 2.51 × 101 | 2.87 × 101 | 5.60 × 10−4 | 2.27 × 104 | 2.24 × 10−6 | |
| Mean | 2.89 × 101 | 2.67 × 101 | 2.35 × 101 | 2.80 × 101 | 8.45 × 10−5 | 7.75 × 103 | 1.03 × 10−6 | |
| Std | 2.47 × 10−2 | 7.96 × 10−1 | 5.87 × 10−1 | 3.10 × 10−1 | 1.50 × 10−4 | 5.41 × 103 | 1.06 × 10−6 | |
| F6 | Best | 3.48 × 100 | 9.60 × 10−5 | 3.32 × 10−9 | 7.01 × 10−2 | 1.99 × 10−10 | 5.18 × 101 | 9.98 × 10−9 |
| Worst | 6.28 × 100 | 1.36 × 100 | 1.71 × 10−7 | 9.51 × 10−1 | 2.22 × 10−6 | 4.60 × 102 | 2.35 × 10−8 | |
| Mean | 4.98 × 100 | 6.08 × 10−1 | 2.70 × 10−8 | 3.29 × 10−1 | 4.36 × 10−7 | 2.50 × 102 | 1.88 × 10−8 | |
| Std | 6.48 × 10−1 | 3.91 × 10−1 | 3.38 × 10−8 | 2.07 × 10−1 | 5.68 × 10−7 | 1.05 × 102 | 7.65 × 10−9 | |
| F7 | Best | 8.60 × 10−4 | 6.36 × 10−4 | 2.06 × 10−5 | 1.49 × 10−4 | 5.74 × 10−6 | 1.55 × 10−2 | 1.29 × 10−5 |
| Worst | 6.09 × 10−3 | 5.87 × 10−3 | 3.18 × 10−4 | 1.68 × 10−2 | 9.01 × 10−4 | 1.15 × 10−1 | 1.00 × 10−4 | |
| Mean | 3.13 × 10−3 | 2.41 × 10−3 | 1.57 × 10−4 | 3.62 × 10−3 | 2.88 × 10−4 | 4.02 × 10−2 | 4.56 × 10−5 | |
| Std | 1.28 × 10−3 | 1.24 × 10−3 | 8.72 × 10−5 | 3.36 × 10−3 | 2.25 × 10−4 | 2.27 × 10−2 | 4.74 × 10−5 | |
| F8 | Best | −1.71 × 107 | −7.42 × 103 | −9.41 × 103 | −1.26 × 104 | −1.26 × 104 | −4.11 × 103 | −1.23 × 104 |
| Worst | −6.46 × 104 | −4.57 × 103 | −7.32 × 103 | −7.05 × 103 | −5.63 × 103 | −2.94 × 103 | −1.22 × 104 | |
| Mean | −1.48 × 106 | −6.18 × 103 | −8.51 × 103 | −9.84 × 103 | −8.76 × 103 | −3.40 × 103 | −1.23 × 104 | |
| Std | 3.37 × 106 | 8.07 × 102 | 5.36 × 102 | 1.87 × 103 | 2.36 × 103 | 2.90 × 102 | 7.79 × 101 | |
| F9 | Best | 3.42 × 10−8 | 1.65 × 10−12 | 0.00 × 100 | 0.00 × 100 | 0.00 × 100 | 3.12 × 101 | 0.00 × 100 |
| Worst | 3.58 × 10−4 | 2.03 × 101 | 0.00 × 100 | 5.68 × 10−14 | 0.00 × 100 | 1.73 × 102 | 0.00 × 100 | |
| Mean | 2.50 × 10−5 | 7.42 × 100 | 0.00 × 100 | 2.27 × 10−15 | 0.00 × 100 | 1.15 × 102 | 0.00 × 100 | |
| Std | 7.67 × 10−5 | 5.76 × 100 | 0.00 × 100 | 1.14 × 10−14 | 0.00 × 100 | 3.90 × 101 | 0.00 × 100 | |
| F10 | Best | 6.63 × 10−4 | 6.33 × 10−11 | 8.88 × 10−16 | 8.88 × 10−16 | 8.88 × 10−16 | 3.80 × 100 | 8.88 × 10−16 |
| Worst | 1.87 × 10−3 | 6.28 × 10−10 | 8.88 × 10−16 | 1.51 × 10−14 | 8.88 × 10−16 | 6.75 × 100 | 8.88 × 10−16 | |
| Mean | 1.35 × 10−3 | 2.28 × 10−10 | 8.88 × 10−16 | 5.58 × 10−15 | 8.88 × 10−16 | 5.25 × 100 | 8.88 × 10−16 | |
| Std | 2.77 × 10−4 | 1.38 × 10−10 | 0.00 × 100 | 2.85 × 10−15 | 0.00 × 100 | 7.50 × 10−1 | 0.00 × 100 | |
| ENV. Model | Metrics | Shortest Path Length Cost (m) | Steering Cost | Smoothness Cost (mot) | Time Cost (s) | |
|---|---|---|---|---|---|---|
| Algorithm | ||||||
| ENV.1 | BOA | 914.530 | 8 | 0.591 | 2.056 | |
| GWO | 802.370 | 9 | 0.456 | 6.564 | ||
| MRFO | 777.267 | 11 | 0.794 | 1.920 | ||
| WOA | 801.650 | 8 | 0.455 | 7.037 | ||
| SSA | 862.133 | 5 | 0.628 | 3.472 | ||
| WSO | 847.487 | 7 | 0.309 | 5.416 | ||
| IWSO | 710.873 | 5 | 0.215 | 1.247 | ||
| ENV.2 | BOA | 1144.975 | 19 | 3.097 | 7.846 | |
| GWO | 996.773 | 11 | 0.947 | 2.228 | ||
| MRFO | 950.803 | 11 | 0.930 | 2.256 | ||
| WOA | 941.590 | 11 | 0.977 | 3.355 | ||
| SSA | 959.620 | 15 | 2.220 | 6.317 | ||
| WSO | 1044.975 | 11 | 1.024 | 5.490 | ||
| IWSO | 927.925 | 10 | 0.926 | 1.033 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, J.; Liu, L. Optimal Path Planning Method for Unmanned Surface Vehicles Based on Improved Shark-Inspired Algorithm. J. Mar. Sci. Eng. 2023, 11, 1386. https://doi.org/10.3390/jmse11071386
Liang J, Liu L. Optimal Path Planning Method for Unmanned Surface Vehicles Based on Improved Shark-Inspired Algorithm. Journal of Marine Science and Engineering. 2023; 11(7):1386. https://doi.org/10.3390/jmse11071386
Chicago/Turabian StyleLiang, Jingrun, and Lisang Liu. 2023. "Optimal Path Planning Method for Unmanned Surface Vehicles Based on Improved Shark-Inspired Algorithm" Journal of Marine Science and Engineering 11, no. 7: 1386. https://doi.org/10.3390/jmse11071386