
Workflow for the Validation of Geomechanical Simulations through Seabed Monitoring for Offshore Underground Activities

 ,
,  , , , , and
, , , , and
Abstract
:1. Introduction
2. Autonomous Underwater Vehicle (AUV)
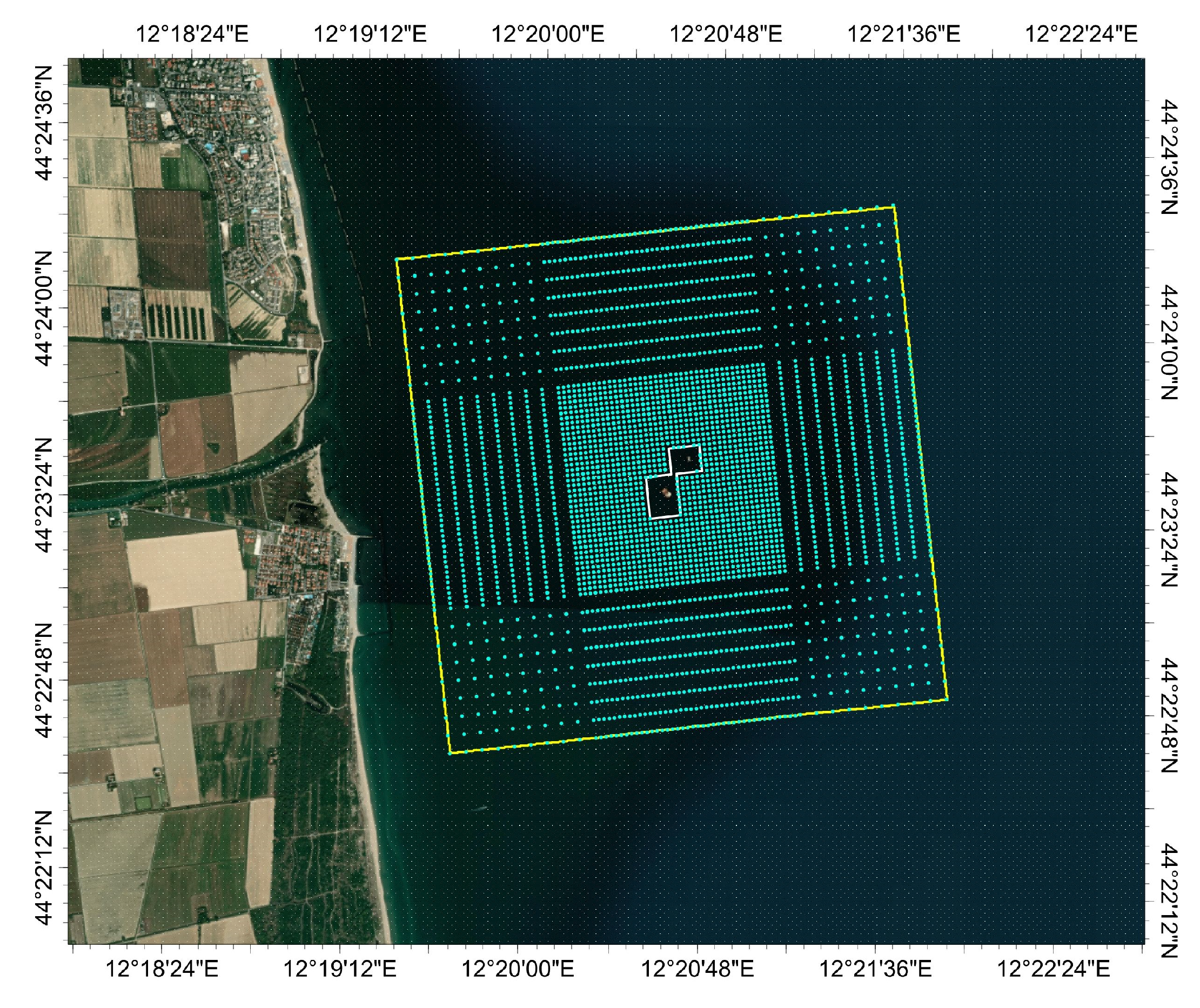
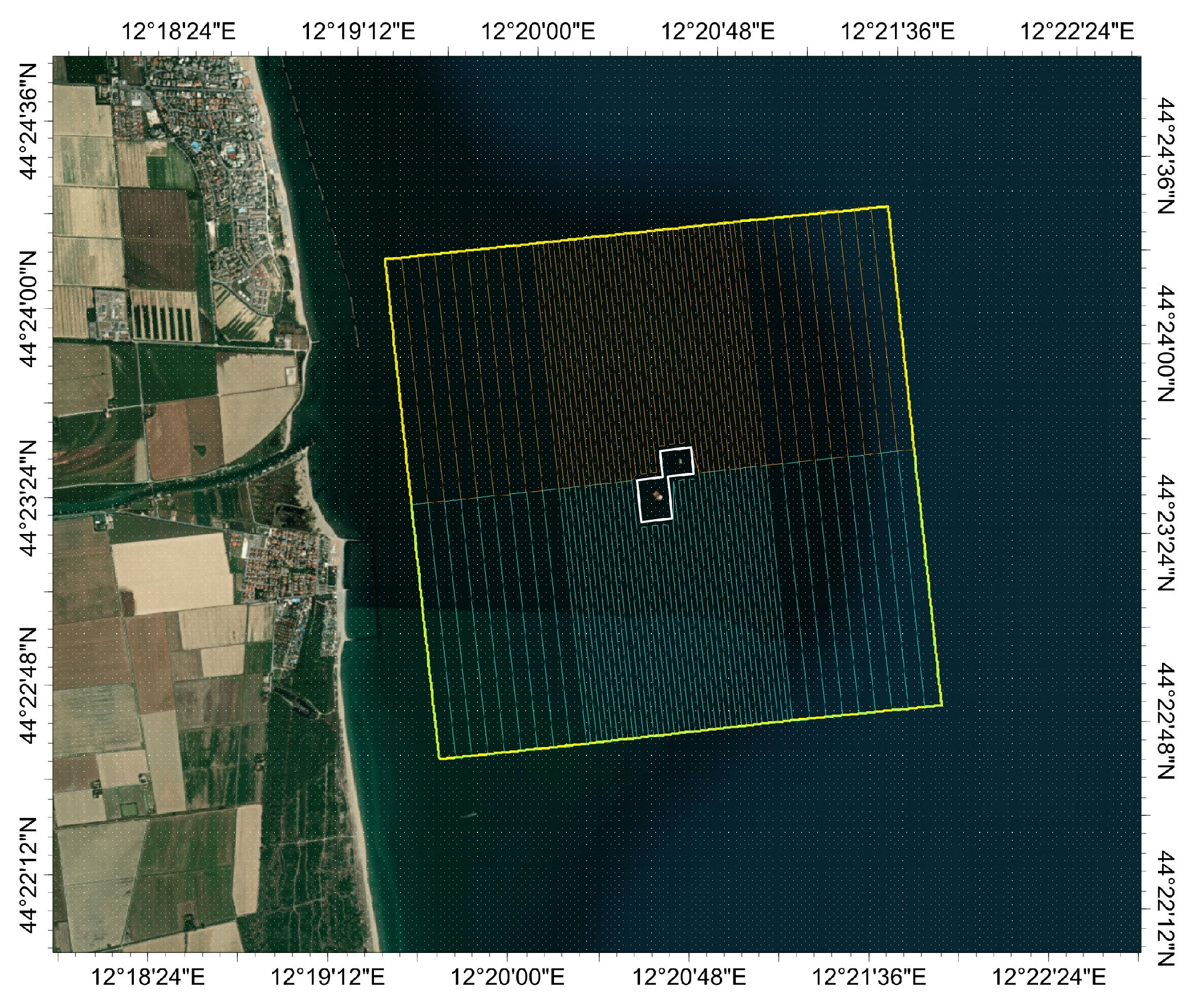
3. Survey Planning
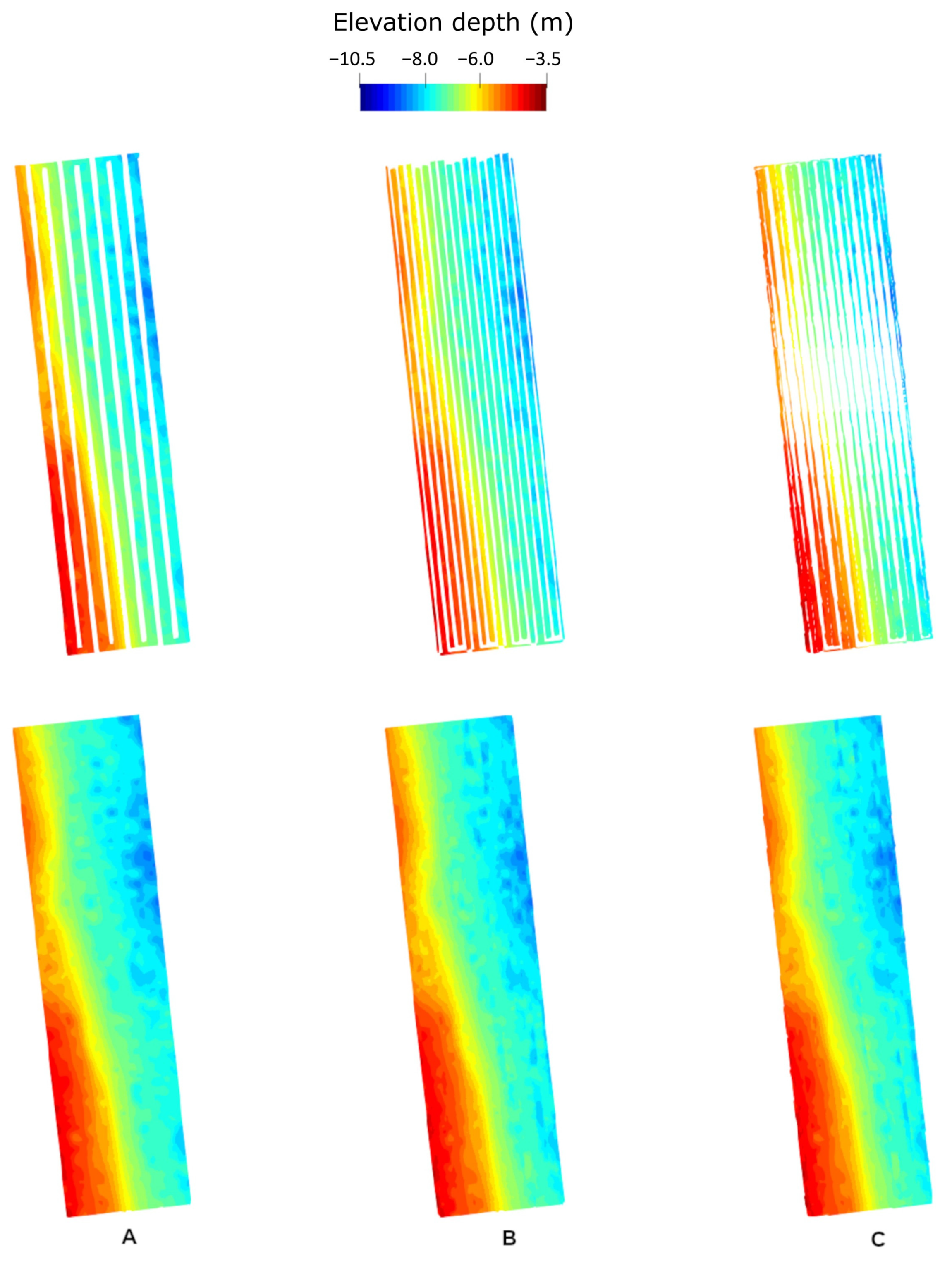
4. Seabed Mapping Based on the Measured Data
- Arithmetic operations on individual maps. They are used to make depth corrections to the original dataset measured by the sonar array. Through these operations, an alignment of different mapped sections can be obtained.
- Operations for selecting or filtering portions of maps. They can isolate specific portions of a bathymetric map to conduct selective operations. Invalid portions of the bathymetric map can be identified, eliminated, and subsequently reconstructed through interpolation techniques.
- Operations between maps. The main operations, such as union and intersection/non-intersection, allow one to perform selection operations on the portions of overlapping maps to define a final mapping based on the adopted criteria.
5. Validation of the Geomechanical Simulations
6. Conclusions
- The integration of knowledge from different disciplines (physics, engineering, geomechanics, modeling, and ICT) to provide improved reservoir and storage monitoring;
- The implementation of a multibeam scanner with a high spatial resolution and high georeferencing, integrated with other sensors, for the detection of the bathymetry with high accuracy (<10 cm);
- The possibility to validate or calibrate geomechanical models of offshore reservoirs or storage based on periodical seabed monitoring and thus to indirectly assess safety conditions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jeanne, P.; Zhang, Y.; Rutqvist, J. Influence of Hysteretic Stress Path Behavior on Seal Integrity during Gas Storage Operation in a Depleted Reservoir. J. Rock Mech. Geotech. Eng. 2020, 12, 886–899. [Google Scholar] [CrossRef]
- Kumar, K.R.; Honorio, H.T.; Hajibeygi, H. Simulation of the Inelastic Deformation of Porous Reservoirs under Cyclic Loading Relevant for Underground Hydrogen Storage. Sci. Rep. 2022, 12, 21404. [Google Scholar] [CrossRef] [PubMed]
- Huang, M.-T.; Zhai, P.-M. Achieving Paris Agreement Temperature Goals Requires Carbon Neutrality by Middle Century with Far-Reaching Transitions in the Whole Society. Adv. Clim. Chang. Res. 2021, 12, 281–286. [Google Scholar] [CrossRef]
- Rogelj, J.; den Elzen, M.; Höhne, N.; Fransen, T.; Fekete, H.; Winkler, H.; Schaeffer, R.; Sha, F.; Riahi, K.; Meinshausen, M. Paris Agreement Climate Proposals Need a Boost to Keep Warming Well below 2 °C. Nature 2016, 534, 631–639. [Google Scholar] [CrossRef] [Green Version]
- IEA. Net Zero by 2050—A Roadmap for the Global Energy Sector 2021. p. 224. Available online: https://iea.blob.core.windows.net/assets/063ae08a-7114-4b58-a34e-39db2112d0a2/NetZeroby2050-ARoadmapfortheGlobalEnergySector.pdf (accessed on 4 July 2023).
- Hydrogen TCP-Task 42. In Underground Hydrogen Storage: Technology Monitor Report; TNO - Netherlands Organisation for Applied Scientific Research: Delft, The Netherlands, 2023; p. 153.
- Bocchini, S.; Castro, C.; Cocuzza, M.; Ferrero, S.; Latini, G.; Martis, A.; Pirri, F.; Scaltrito, L.; Rocca, V.; Verga, F.; et al. The Virtuous CO2 Circle or the Three Cs: Capture, Cache, and Convert. J. Nanomater. 2017, 2017, 6594151. [Google Scholar] [CrossRef] [Green Version]
- Benetatos, C.; Salina Borello, E.; Peter, C.; Rocca, V.; Romagnoli, R. Considerations on Energy Transition. GEAM Geoing. Ambient. E Min. 2019, 158, 26–31. [Google Scholar]
- Benetatos, C.; Bocchini, S.; Carpignano, A.; Chiodoni, A.; Cocuzza, M.; Deangeli, C.; Eid, C.; Ferrero, D.; Gerboni, R.; Giglio, G.; et al. How Underground Systems Can Contribute to Meet the Challenges of Energy Transition. GEAM Geoing. Ambient. E Min. 2021, 58, 65–80. [Google Scholar] [CrossRef]
- Rocca, V.; Viberti, D. Enviromental Sustainability of Oil Industry. Am. J. Environ. Sci. 2013, 9, 210–217. [Google Scholar] [CrossRef] [Green Version]
- Verga, F. What’s Conventional and What’s Special in a Reservoir Study for Underground Gas Storage. Energies 2018, 11, 1245. [Google Scholar] [CrossRef] [Green Version]
- Ajayi, T.; Gomes, J.S.; Bera, A. A Review of CO2 Storage in Geological Formations Emphasizing Modeling, Monitoring and Capacity Estimation Approaches. Pet. Sci. 2019, 16, 1028–1063. [Google Scholar] [CrossRef] [Green Version]
- Aminu, M.D.; Nabavi, S.A.; Rochelle, C.A.; Manovic, V. A Review of Developments in Carbon Dioxide Storage. Appl. Energy 2017, 208, 1389–1419. [Google Scholar] [CrossRef] [Green Version]
- Ravenna CCS. Available online: https://ccushub.ogci.com/focus_hubs/ravenna/ (accessed on 25 May 2023).
- Matos, C.R.; Carneiro, J.F.; Silva, P.P. Overview of Large-Scale Underground Energy Storage Technologies for Integration of Renewable Energies and Criteria for Reservoir Identification. J. Energy Storage 2019, 21, 241–258. [Google Scholar] [CrossRef]
- Pawar, R.J.; Bromhal, G.S.; Carey, J.W.; Foxall, W.; Korre, A.; Ringrose, P.S.; Tucker, O.; Watson, M.N.; White, J.A. Recent Advances in Risk Assessment and Risk Management of Geologic CO2 Storage. Int. J. Greenh. Gas Control 2015, 40, 292–311. [Google Scholar] [CrossRef] [Green Version]
- Newell, P.; Ilgen, A.G. Overview of Geological Carbon Storage (GCS). In Science of Carbon Storage in Deep Saline Formations; Elsevier: Amsterdam, The Netherlands, 2019; pp. 1–13. ISBN 978-0-12-812752-0. [Google Scholar]
- Zhao, K.; Jia, C.; Li, Z.; Du, X.; Wang, Y.; Li, J.; Yao, Z.; Yao, J. Recent Advances and Future Perspectives in Carbon Capture, Transportation, Utilization, and Storage (CCTUS) Technologies: A Comprehensive Review. Fuel 2023, 351, 128913. [Google Scholar] [CrossRef]
- Orlic, B.; Wassing, B.B.T.; Geel, C.R. Field Scale Geomechanical Modeling for Prediction of Fault Stability during Underground Gas Storage Operations in a Depleted Gas Field in The Netherlands; OnePetro: Richardson, TX, USA, 2013. [Google Scholar]
- Teatini, P.; Castelletto, N.; Ferronato, M.; Gambolati, G.; Janna, C.; Cairo, E.; Marzorati, D.; Colombo, D.; Ferretti, A.; Bagliani, A.; et al. Geomechanical Response to Seasonal Gas Storage in Depleted Reservoirs: A Case Study in the Po River Basin, Italy. J. Geophys. Res. Earth Surf. 2011, 116, JF001793. [Google Scholar] [CrossRef]
- Tamburini, A.; Conte, S.D.; Ferretti, A.; Rucci, A. Monitoring Surface Deformation with Satellite InSAR—A Tool for Time Lapse Analysis of UGS. Geosci. Eng. 2015, 2015, 1–5. [Google Scholar]
- Raziperchikolaee, S.; Cotter, Z.; Gupta, N. Assessing Mechanical Response of CO2 Storage into a Depleted Carbonate Reef Using a Site-Scale Geomechanical Model Calibrated with Field Tests and InSAR Monitoring Data. J. Nat. Gas Sci. Eng. 2021, 86, 103744. [Google Scholar] [CrossRef]
- Antoncecchi, I.; Ciccone, F.; Rossi, G.; Agate, G.; Colucci, F.; Moia, F.; Manzo, M.; Lanari, R.; Bonano, M.; De Luca, C.; et al. Soil Deformation Analysis through Fluid-Dynamic Modelling and Dinsar Measurements: A Focus on Groundwater Withdrawal in the Ravenna Area (Italy). Bull. Geophys. Oceanogr. 2021, 62, 301–318. [Google Scholar] [CrossRef]
- Hannis, S.; Chadwick, A.; Connelly, D.; Blackford, J.; Leighton, T.; Jones, D.; White, J.; White, P.; Wright, I.; Widdicomb, S.; et al. Review of Offshore CO2 Storage Monitoring: Operational and Research Experiences of Meeting Regulatory and Technical Requirements. Energy Procedia 2017, 114, 5967–5980. [Google Scholar] [CrossRef] [Green Version]
- Hernández, J.D.; Istenic, K.; Gracias, N.; García, R.; Ridao, P.; Carreras, M. Autonomous Seabed Inspection for Environmental Monitoring. In Proceedings of the Robot 2015: Second Iberian Robotics Conference; Reis, L.P., Moreira, A.P., Lima, P.U., Montano, L., Muñoz-Martinez, V., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 27–39. [Google Scholar]
- Zwolak, K.; Wigley, R.; Bohan, A.; Zarayskaya, Y.; Bazhenova, E.; Dorshow, W.; Sumiyoshi, M.; Sattiabaruth, S.; Roperez, J.; Proctor, A.; et al. The Autonomous Underwater Vehicle Integrated with the Unmanned Surface Vessel Mapping the Southern Ionian Sea. The Winning Technology Solution of the Shell Ocean Discovery XPRIZE. Remote Sens. 2020, 12, 1344. [Google Scholar] [CrossRef] [Green Version]
- Wynn, R.B.; Huvenne, V.A.I.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their Past, Present and Future Contributions to the Advancement of Marine Geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef] [Green Version]
- Smith Menandro, P.; Cardoso Bastos, A. Seabed Mapping: A Brief History from Meaningful Words. Geosciences 2020, 10, 273. [Google Scholar] [CrossRef]
- Antoncecchi, I.; Rossi, G.; Bevilacqua, M.; Cianella, R.; Vico, G.; Ferrero, S.; Catania, F.; Pacini, M.; Mondelli, N.; Rovere, M.; et al. Research Hub for an Integrated Green Energy System Reusing Sealines for H2 Storage and Transport. EEMJ 2020, 19, 1647–1656. [Google Scholar] [CrossRef]
- Ferreira, I.O.; Andrade, L.C.d.; Teixeira, V.G.; Santos, F.C.M. State of Art of Bathymetric Surveys. Bol. Ciências Geodésicas 2022, 28, e2022002. [Google Scholar] [CrossRef]
- Jones, D.O.B.; Gates, A.R.; Huvenne, V.A.I.; Phillips, A.B.; Bett, B.J. Autonomous Marine Environmental Monitoring: Application in Decommissioned Oil Fields. Sci. Total Environ. 2019, 668, 835–853. [Google Scholar] [CrossRef]
- ViDEPI. Available online: https://www.videpi.com/videpi/videpi.asp (accessed on 8 May 2023).
- ISTAT. Dataset “Confini Delle Unità Amministrative a Fini Statistici al 1° Gennaio 2023.”, Italian National Istitute of Statistics, Rome, Italy. Available online: https://www.istat.it/it/archivio/222527 (accessed on 8 May 2023).
- Brighenti, G.; Macini, P.; Mesini, E. Subsidence Induced by Offshore Gas Production in the Northern Adriatic Sea; OnePetro: Richardson, TX, USA, 2001. [Google Scholar]
- Suriano, A.; Peter, C.; Benetatos, C.; Verga, F. Gridding Effects on CO2 Trapping in Deep Saline Aquifers. Sustainability 2022, 14, 15049. [Google Scholar] [CrossRef]
- Da Veiga, L.B.; Brezzi, F.; Marini, L.D.; Russo, A. Basic Principles of Virtual Element Methods. Math. Model. Methods Appl. Sci. 2013, 23, 199–214. [Google Scholar] [CrossRef]
- Beirão da Veiga, L.; Brezzi, F.; Marini, L.D.; Russo, A. The Hitchhiker’s Guide to the Virtual Element Method. Math. Model. Methods Appl. Sci. 2014, 24, 1541–1573. [Google Scholar] [CrossRef] [Green Version]
- Beirão da Veiga, L.; Brezzi, F.; Marini, L.D.; Russo, A. Virtual Element Implementation for General Elliptic Equations. In Building Bridges: Connections and Challenges in Modern Approaches to Numerical Partial Differential Equations; Barrenechea, G.R., Brezzi, F., Cangiani, A., Georgoulis, E.H., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 39–71. ISBN 978-3-319-41640-3. [Google Scholar]
- Beirão da Veiga, L.; Dassi, F.; Russo, A. High-Order Virtual Element Method on Polyhedral Meshes. Comput. Math. Appl. 2017, 74, 1110–1122. [Google Scholar] [CrossRef]
- Ahmad, B.; Alsaedi, A.; Brezzi, F.; Marini, L.D.; Russo, A. Equivalent Projectors for Virtual Element Methods. Comput. Math. Appl. 2013, 66, 376–391. [Google Scholar] [CrossRef]
- Serazio, C.; Tamburini, M.; Verga, F.; Berrone, S. Geological Surface Reconstruction from 3D Point Clouds. MethodsX 2021, 2021, 101398. [Google Scholar] [CrossRef] [PubMed]
- Benetatos, C.; Codegone, G.; Deangeli, C.; Giani, G.P.; Gotta, A.; Marzano, F.; Rocca, V.; Verga, F. Guidelines for the Study of Subsidence Triggered by Hydrocarbon Production. GEAM 2017, 152, 85–96. [Google Scholar]
- Benlalam, N.; Serazio, C.; Rocca, V. VEM Application to Geomechanical Simulations of an Italian Adriatic Offshore Gas Storage Scenario. GEAM 2022, 165, 41–49. [Google Scholar] [CrossRef]
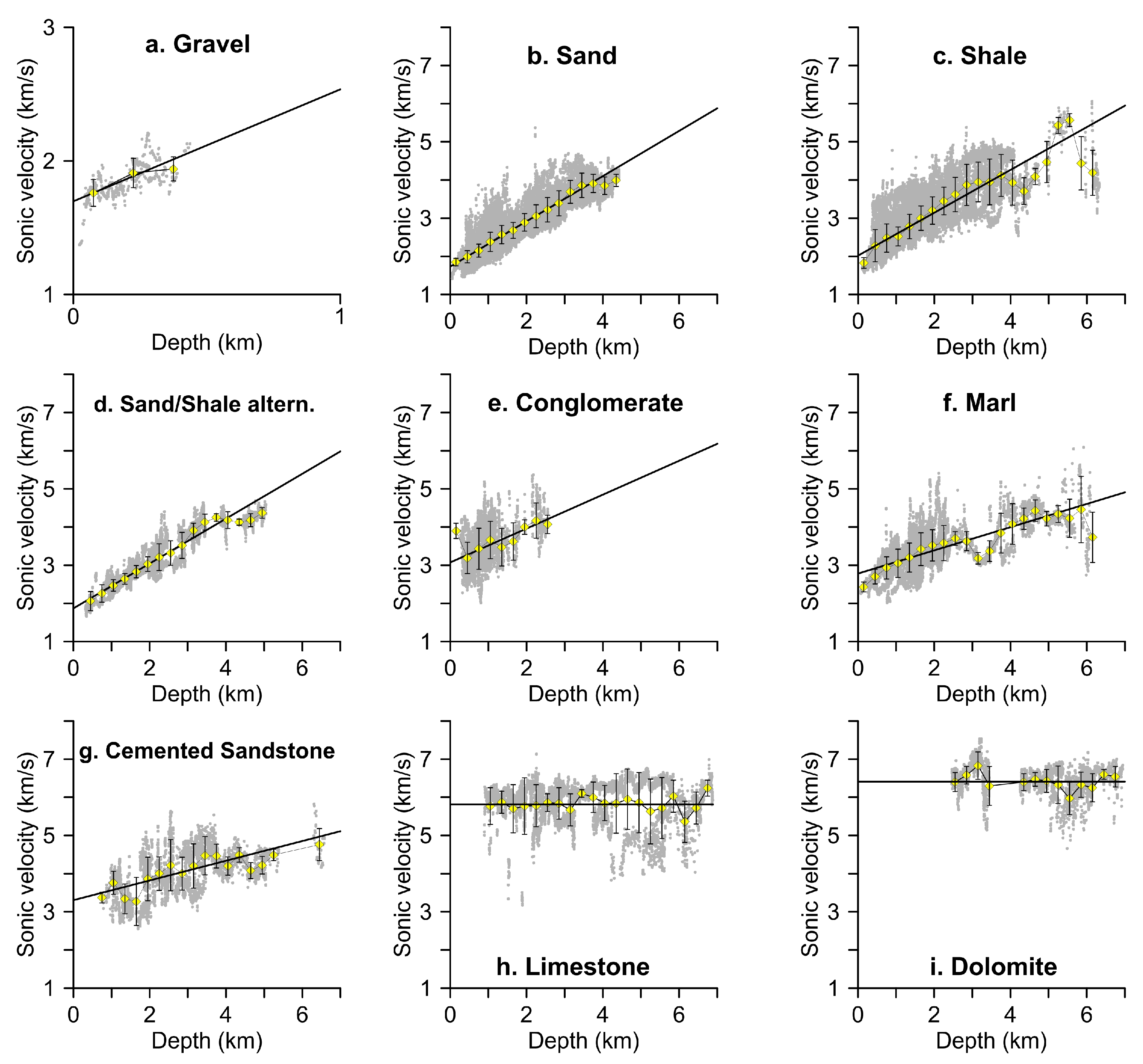
- Benetatos, C.; Codegone, G.; Marzano, F.; Peter, C.; Verga, F. Calculation of Lithology-Specific p-Wave Velocity Relations from Sonic Well Logs for the Po-Plain Area and the Northern Adriatic Sea; Offshore Mediterranean Conference and Exhibition 2019, OMC 2019: Ravenna, Italy, 2019; p. 148084. [Google Scholar]
- Livani, M.; Petracchini, L.; Benetatos, C.; Marzano, F.; Billi, A.; Carminati, E.; Doglioni, C.; Petricca, P.; Maffucci, R.; Codegone, G.; et al. Subsurface Geological and Geophysical Data from the Po Plain and the Northern Adriatic Sea (North Italy). Earth Syst. Sci. Data Discuss. 2023, 2023, 1–41. [Google Scholar] [CrossRef]
- Gentile, G.F.; Bressan, G.; Burlini, L.; De Franco, R. Three-Dimensional VP and VP/VS Models of the Upper Crust in the Friuli Area (Northeastern Italy). Geophys. J. Int. 2000, 141, 457–478. [Google Scholar] [CrossRef] [Green Version]
- Piana Agostinetti, N.; Amato, A. Moho Depth and Vp/Vs Ratio in Peninsular Italy from Teleseismic Receiver Functions. J. Geophys. Res. Solid Earth 2009, 114, B06303, 1–17. [Google Scholar] [CrossRef]
- Scafidi, D.; Solarino, S.; Eva, C. P Wave Seismic Velocity and Vp/Vs Ratio beneath the Italian Peninsula from Local Earthquake Tomography. Tectonophysics 2009, 465, 1–23. [Google Scholar] [CrossRef]
- Castagna, J.P.; Batzle, M.L.; Eastwood, R.L. Relationships between Compressional-Wave and Shear-Wave Velocities in Clastic Silicate Rocks. Geophysics 1985, 50, 571–581. [Google Scholar] [CrossRef]
- Gardner, G.H.F.; Gardner, L.W.; Gregory, A.R. Formation velocity and density—The diagnostic basics for stratigraphic traps. Geophysics 1974, 39, 770–780. [Google Scholar] [CrossRef] [Green Version]
- Montone, P.; Mariucci, M.T. P-Wave Velocity, Density, and Vertical Stress Magnitude Along the Crustal Po Plain (Northern Italy) from Sonic Log Drilling Data. Pure Appl. Geophys. 2015, 172, 1547–1561. [Google Scholar] [CrossRef] [Green Version]
- Mavko, G.; Mukerji, T.; Dvorkin, J. The Rock Physics Handbook: Tools for Seismic Analysis of Porous Media, 2nd ed.; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Specifications | |
|---|---|
| Range resolution | <10 mm (acoustic w. 80 kHz bandwidth) |
| Number of beams | 256–512 EA & ED |
| Operating nominal frequency | 400 kHz (frequency agility 200–700 kHz) |
| Ping rate | up to 60 Hz, adaptive |
| Depth range | 0.2–275 m (160 m typical @400 kHz) |
| Resolution (across × along) | standard: 0.9O × 1.9O @400 kHz AND 0.5O × 1.0O @700 kHz. |
| Narrow option | 0.9O × 0.9O @400 kHz and 0.5O × 0.5O @700 kHz |
| Depth rating | 900 m |
| Operating temperature | −4 °C to +40 °C (topside −20 °C to +55 °C) |
| Technical Specifications | |
|---|---|
| Dimensions | Length 2000 mm, diameter 140 mm |
| Autonomy | Up to 6 h |
| Max depth | 300 m |
| Operating speed | Up to 1.2 knots |
| Sensors | 10 degrees-of-freedom inertial platform (IMU) (piezoelectric inclinometer, three gyroscopes, three magnetometers and one barometer), integrated high-precision antenna, and GPS |
| Communication system | Wi-Fi 2.44 Mhz, 150 Mbps, adjustable output power, max. 27 dBm. Radius 500 m. |
| Additional modes | Glider, horizontal/vertical translation, and 360-degree rotation |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benetatos, C.; Catania, F.; Giglio, G.; Pirri, C.F.; Raeli, A.; Scaltrito, L.; Serazio, C.; Verga, F. Workflow for the Validation of Geomechanical Simulations through Seabed Monitoring for Offshore Underground Activities. J. Mar. Sci. Eng. 2023, 11, 1387. https://doi.org/10.3390/jmse11071387
Benetatos C, Catania F, Giglio G, Pirri CF, Raeli A, Scaltrito L, Serazio C, Verga F. Workflow for the Validation of Geomechanical Simulations through Seabed Monitoring for Offshore Underground Activities. Journal of Marine Science and Engineering. 2023; 11(7):1387. https://doi.org/10.3390/jmse11071387
Chicago/Turabian StyleBenetatos, Christoforos, Felice Catania, Giorgio Giglio, Candido Fabrizio Pirri, Alice Raeli, Luciano Scaltrito, Cristina Serazio, and Francesca Verga. 2023. "Workflow for the Validation of Geomechanical Simulations through Seabed Monitoring for Offshore Underground Activities" Journal of Marine Science and Engineering 11, no. 7: 1387. https://doi.org/10.3390/jmse11071387