
Hydrodynamics Analysis of an Underwater Foldable Arm
Abstract
:1. Introduction
2. Design of Foldable Arm
3. Tank Experiment
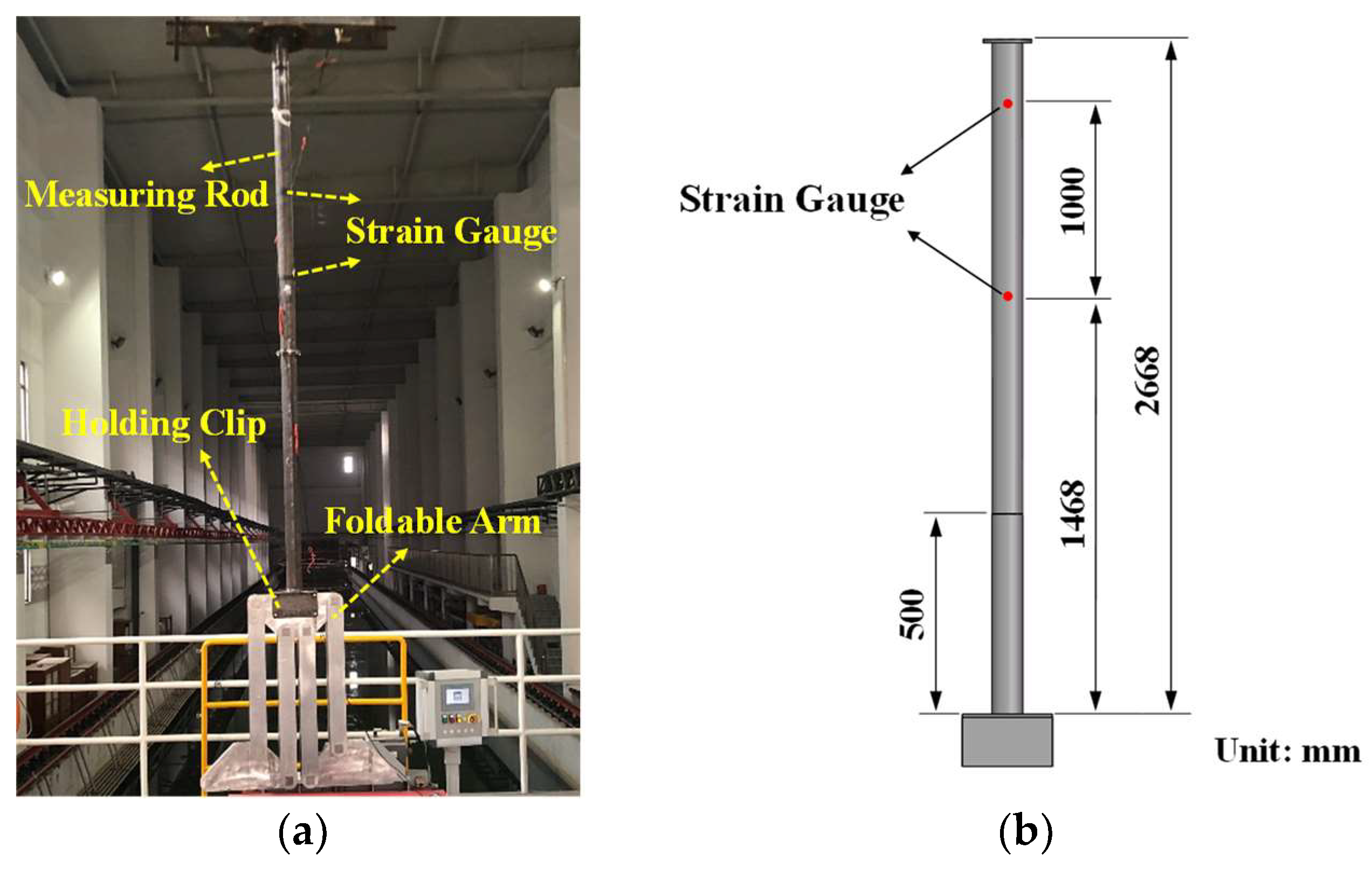
3.1. Experimental Setup
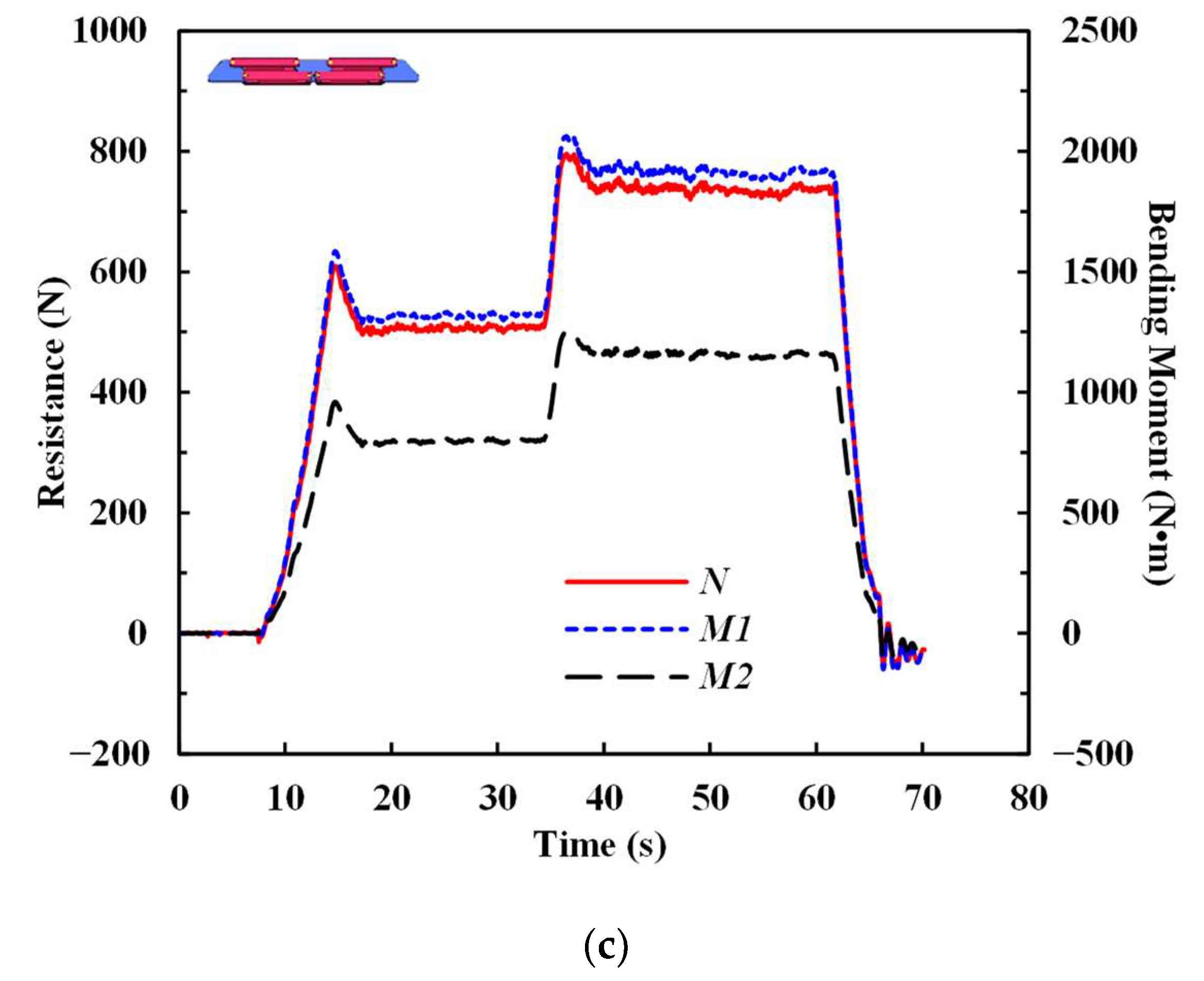
3.2. Experimental Results
4. Numerical Simulation
- (1)
- This model can adapt to various physical phenomena where pressure gradient changes.
- (2)
- It applies to the viscous layer, and it can precisely simulate the phenomenon of the boundary layer through the application of the near-wall function without using the viscous damping function which may distort easily.
4.1. Validation of the Numerical Method
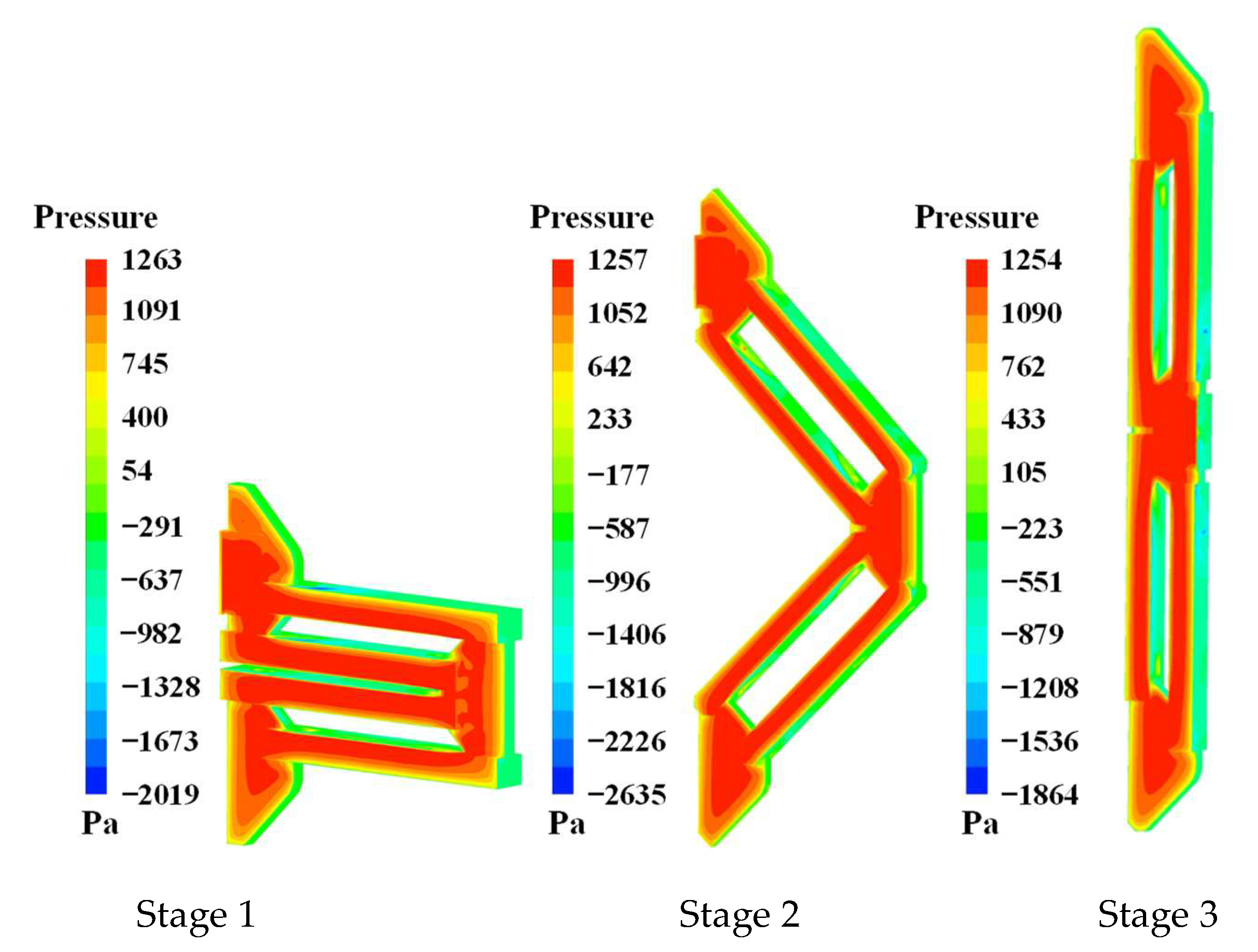
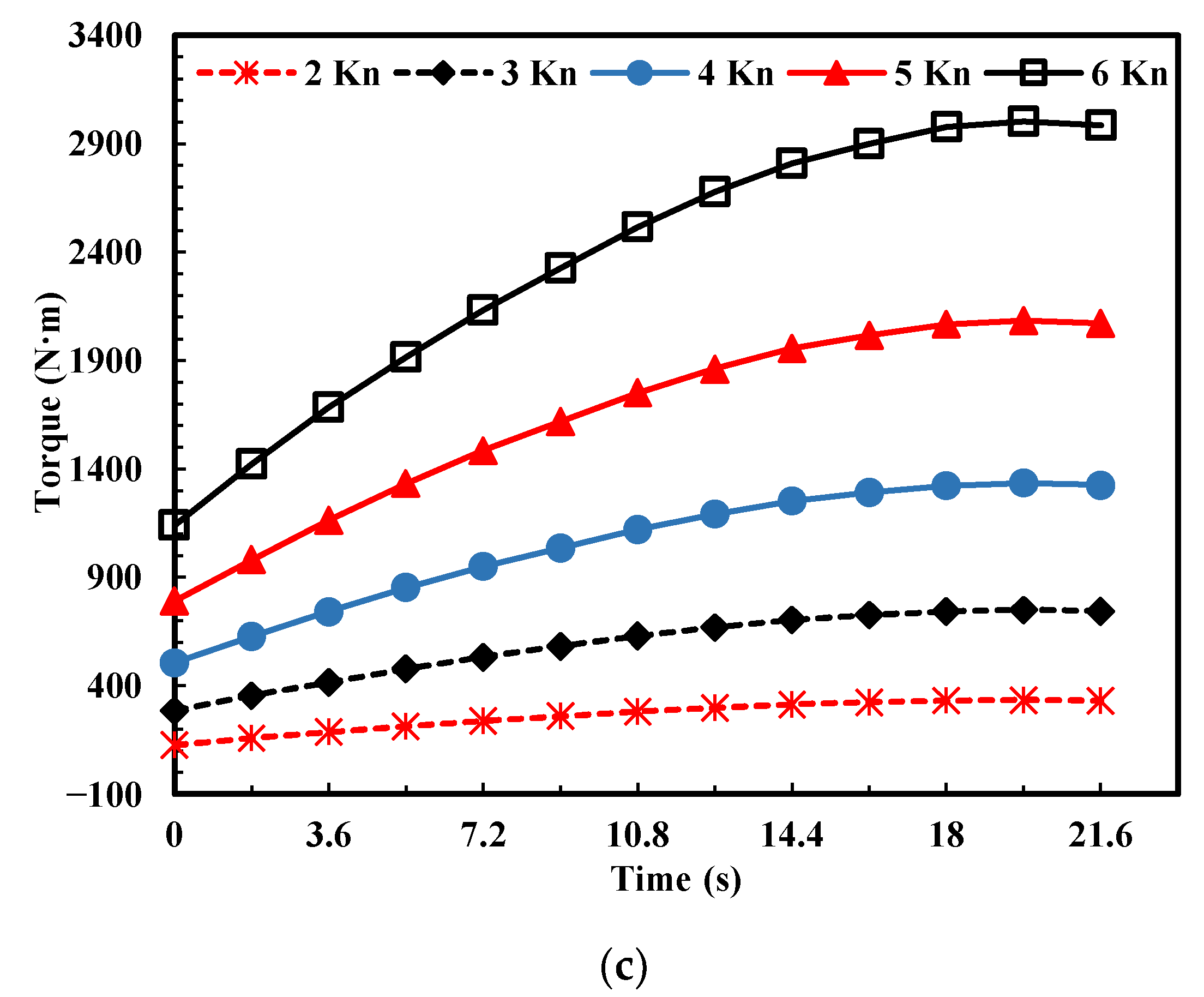
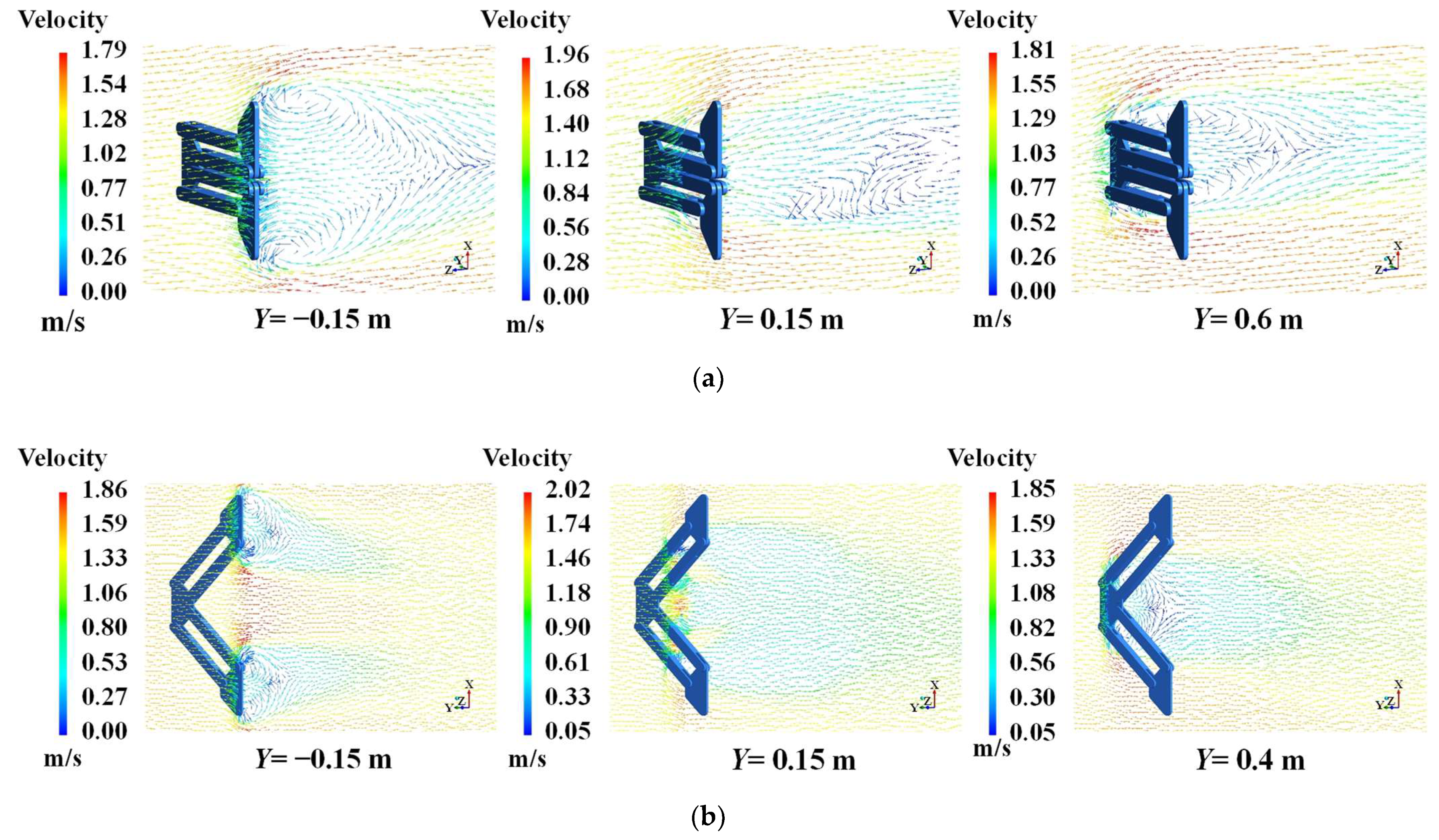
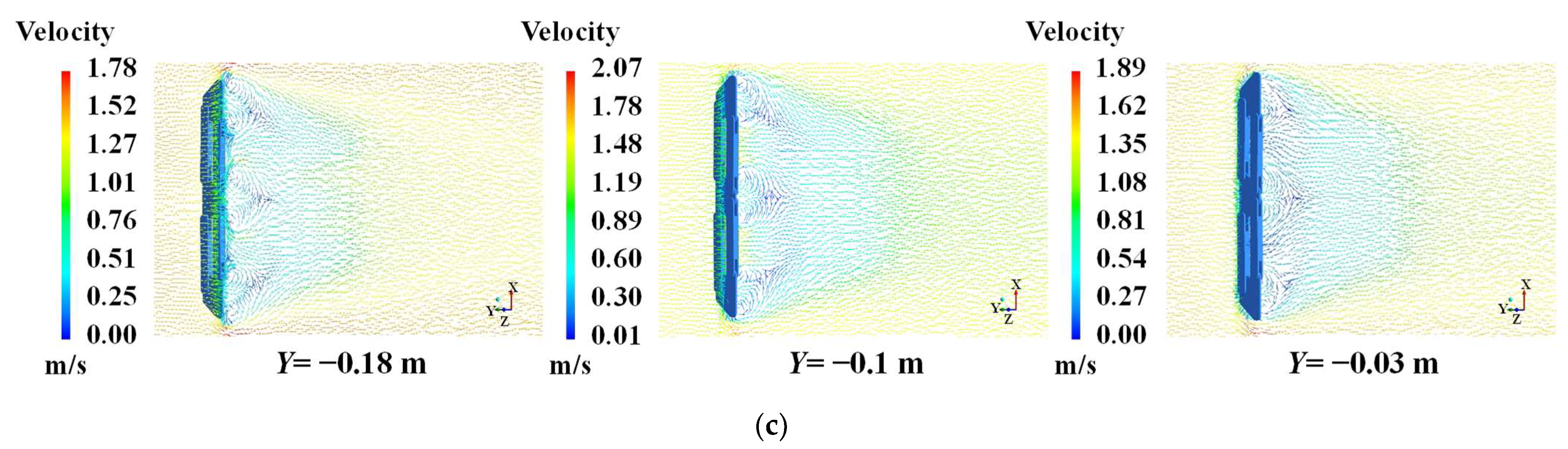
4.2. Hydrodynamics Performance of the Unfolding Process
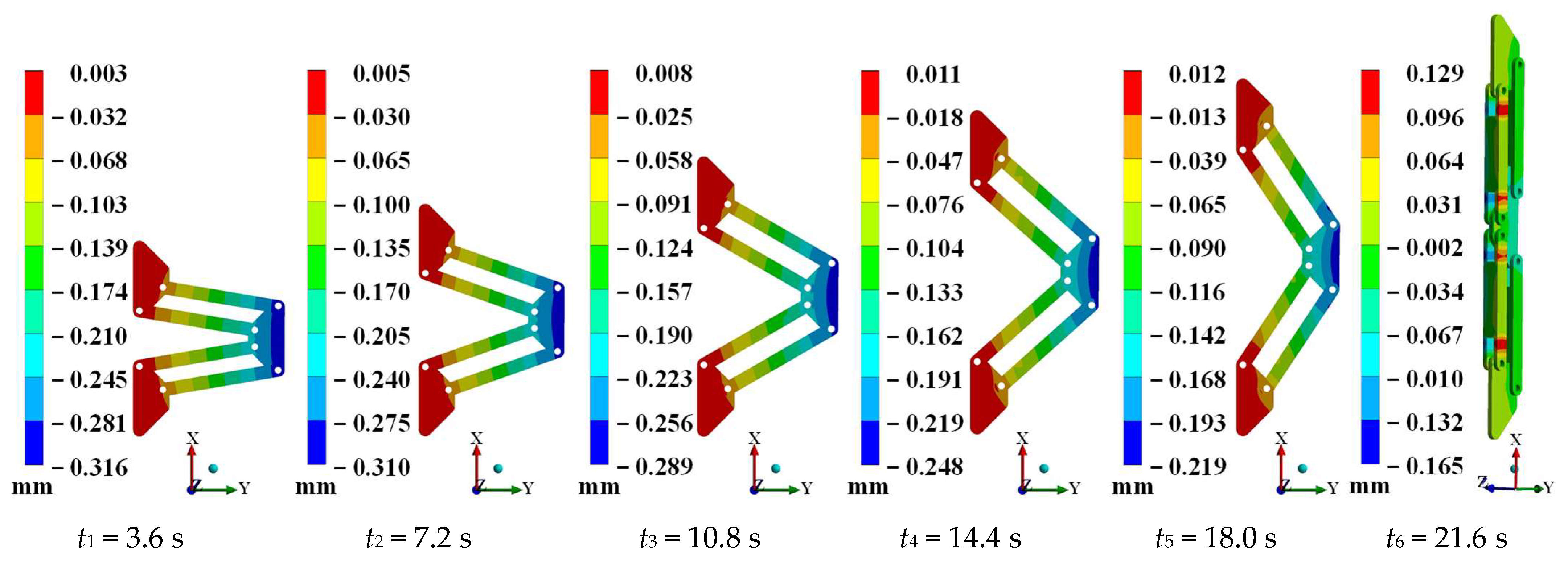
4.3. Fluid Structure Interaction of the Dynamic Unfolding Process
5. Conclusions
- (1)
- The maximum deviation of the resistances and torques between the static posture simulation and experiment results (the towing velocity is 3.0 Kn) are 8.04% and 5.73%, respectively. The results show that the numerical model is effective for accurately predicting the resistance and torque of the underwater foldable arm.
- (2)
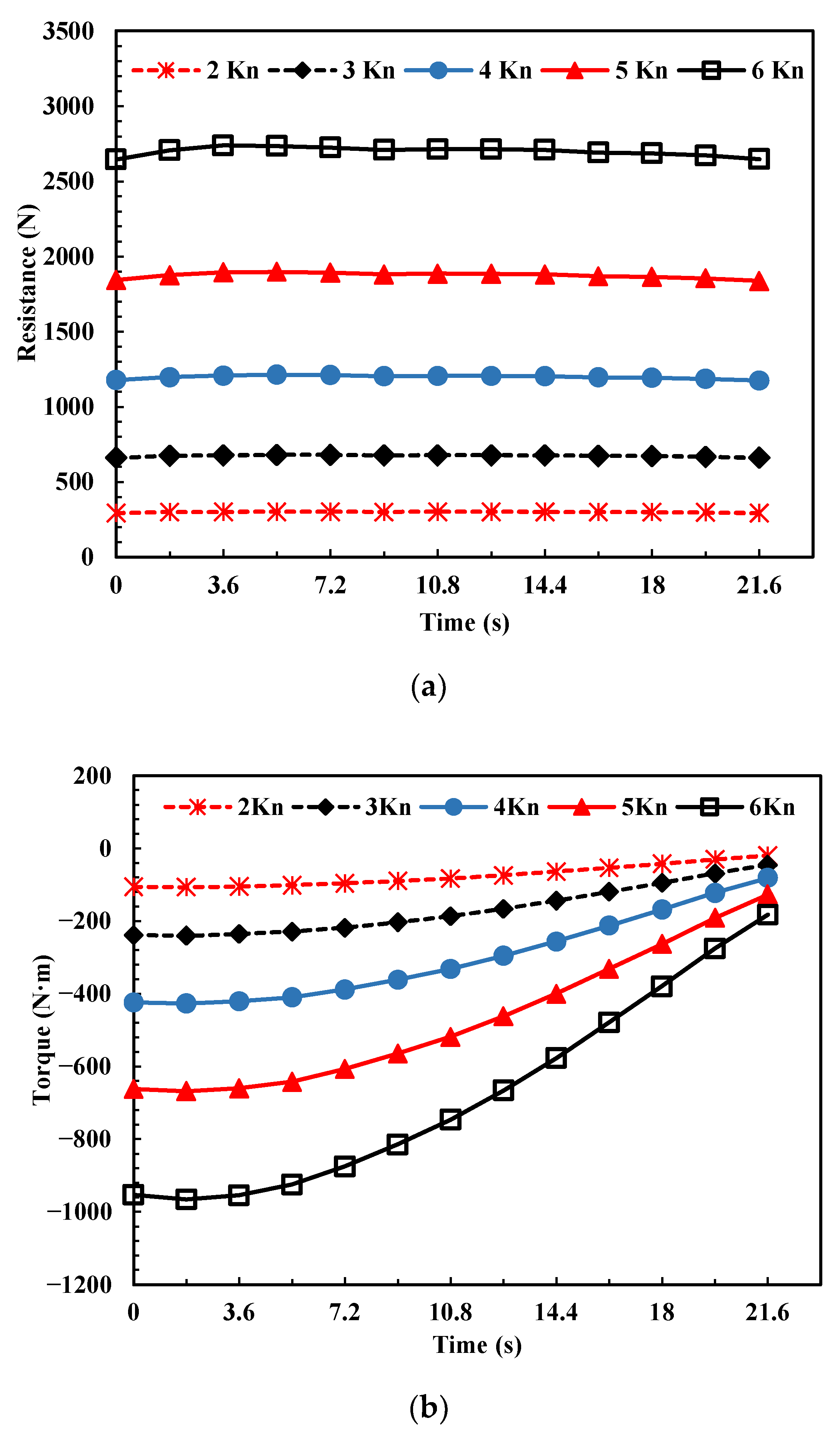
- Considering the overall resistance of the foldable arm and the torque rotates around the X- and Y-axes, the optimal motion velocity of the foldable arm is 3 Kn. The simulation results show that the fluid flow around the foldable arm is relatively regular, allowing the foldable arm to maintain a higher level of stability throughout the movement.
- (3)
- The FSI results show that the maximum directional deformation (Z-axis) in the evaluated cases is relatively small (less than 0.50 mm) and the maximum deformation is along the direction of fluid loading. The maximum equivalent stress of the foldable arm is 578.99 MPa and occurs at the outer edge of the plate where it is hinged to the link.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sun, S.; Chen, F.; Zhao, M. Numerical simulation and analysis of the underwater implosion of spherical hollow ceramic pressure hulls in 11,000 m depth. J. Ocean Eng. Sci. 2022, 8, 181–195. [Google Scholar] [CrossRef]
- Sivčev, S.; Coleman, J.; Omerdić, E.; Dooly, G.; Toal, D. Underwater manipulators: A review. Ocean Eng. 2018, 163, 431–450. [Google Scholar] [CrossRef]
- Capocci, R.; Dooly, G.; Omerdić, E.; Coleman, J.; Newe, T.; Toal, D. Inspection-Class Remotely Operated Vehicles—A Review. J. Mar. Sci. Eng. 2017, 5, 13. [Google Scholar] [CrossRef] [Green Version]
- Christ, R.; Wernli, R. The ROV Manual: A User Guide for Remotely Operated Vehicles, 2nd ed.; Elsevier Science: Oxford, UK, 2014. [Google Scholar]
- Chang, C.C.; Chang, C.Y.; Cheng, Y.T. Distance measurement technology development at remotely teleoperated robotic manipulator system for underwater constructions. In Proceedings of the 2004 International Symposium on Underwater Technology, Taipei, Taiwan, 20–23 April 2004; pp. 333–338. [Google Scholar] [CrossRef]
- Hachicha, S.; Zaoui, C.; Dallagi, H.; Nejim, S.; Maalej, A. Innovative design of an underwater cleaning robot with a two arm manipulator for hull cleaning. Ocean Eng. 2019, 181, 303–313. [Google Scholar] [CrossRef]
- Coleman, D.; Ballard, R.; Gregory, T. Marine archaeological exploration of the Black Sea. Proc. Ocean. 2003, 3, 1287–1291. [Google Scholar] [CrossRef]
- Fletcher, B. Worldwide Undersea MCM Vehicle Technologies; Space and Naval Warfare Systems Center: San Diego, CA, USA, 2000. [Google Scholar]
- Jones, D.O.B. Using existing industrial remotely operated vehicles for deep-sea science. Zool. Scr. 2009, 38, 41–47. [Google Scholar] [CrossRef]
- Mitra, A.; Panda, J.; Warrior, H. Experimental and numerical investigation of the hydrodynamic characteristics of Autonomous Underwater Vehicles over sea-beds with complex topography. Ocean Eng. 2020, 198, 106978. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.-W.; Wang, J.-S.; Wang, L.-P.; Liu, X.-J. Inverse dynamics and simulation of a 3-DOF spatial parallel manipulator. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 3, pp. 4092–4097. [Google Scholar] [CrossRef]
- Kuriyama, Y.; Yasuda, Y.; Yano, K.I.; Hamaguchi, M. Liquid container transfer control by hybrid shape approach for 6dof manipulator. In Proceedings of the SICE Annual Conference, Takamatsu, Japan, 17–20 September 2007; pp. 3069–3072. [Google Scholar] [CrossRef]
- Huang, M.F.; Qian, G.; Luo, W.Z.; Chen, L.L.; Jin, G.C. Dynamics Analysis and Simulation of one-DOF Parallel Manipulator. Adv. Mater. Res. 2011, 422, 47–50. [Google Scholar] [CrossRef]
- Kazakidi, A.; Tsakiris, D.P.; Angelidis, D.; Sotiropoulos, F.; Ekaterinaris, J.A. CFD study of aquatic thrust generation by an octopus-like arm under intense prescribed deformations. Comput. Fluids 2015, 115, 54–65. [Google Scholar] [CrossRef]
- Kolodziejczyk, W. The method of determination of transient hydrodynamic coefficients for a single DOF underwater manipulator. Ocean Eng. 2018, 153, 122–131. [Google Scholar] [CrossRef]
- Afra, B.; Delouei, A.A.; Tarokh, A. Flow-Induced Locomotion of a Flexible Filament in the Wake of a Cylinder in Non-Newtonian Flows. Int. J. Mech. Sci. 2022, 234, 107693. [Google Scholar] [CrossRef]
- Afra, B.; Karimnejad, S.; Delouei, A.A.; Tarokh, A. Flow control of two tandem cylinders by a highly flexible filament: Lattice spring IB-LBM. Ocean Eng. 2022, 250, 111025. [Google Scholar] [CrossRef]
- Huang, S.; Wang, C.; Wang, S.Y. Application and comparison of different turbulence models in the computation of a propeller’s hydrodynamic performance. J. Harbin Eng. Univ. 2009, 30, 481–485. [Google Scholar] [CrossRef]
- Cheng, L. Hydrodynamic Interactions Between Two Bodies. J. Hydrodyn. 2007, 19, 784–785. [Google Scholar] [CrossRef]
- Song, F.X. Shape Design for a Hybrid-Driven Underwater Vehicle Based on CFD; Tianjin University: Tianjin, China, 2011. [Google Scholar]
- Zhang, L.; Wang, Z. A block LU-SGS implicit dual time-stepping algorithm for hybrid dynamic meshes. Comput. Fluids 2004, 33, 891–916. [Google Scholar] [CrossRef]
- Wu, L.; Li, Y.; Su, S.; Yan, P.; Qin, Y. Hydrodynamic analysis of AUV underwater docking with a cone-shaped dock under ocean currents. Ocean Eng. 2014, 85, 110–126. [Google Scholar] [CrossRef]
- Hong, L.; Fang, R.; Cai, X.; Wang, X. Numerical Investigation on Hydrodynamic Performance of a Portable AUV. J. Mar. Sci. Eng. 2021, 9, 812. [Google Scholar] [CrossRef]
- Hong, L.; Wang, X.; Zhang, D.; Xu, H. Numerical Study on Hydrodynamic Coefficient Estimation of an Underactuated Underwater Vehicle. J. Mar. Sci. Eng. 2022, 10, 1049. [Google Scholar] [CrossRef]
- Subudhi, B.; Morris, A. Dynamic modelling, simulation and control of a manipulator with flexible links and joints. Robot. Auton. Syst. 2002, 41, 257–270. [Google Scholar] [CrossRef]
- Zeng, Y.-S.; Yao, Z.-F.; Huang, B.; Wang, F.-J.; Wu, Q.; Xiao, R.-F.; Wang, G.-Y. Numerical studies of the hydrodynamic damping of a vibrating hydrofoil in torsional mode. J. Hydrodyn. 2021, 33, 347–360. [Google Scholar] [CrossRef]
- Huang, J.G.; Sun, Y.L.; Wang, T.M.; Lueth, T.C.; Liang, J.H.; Yang, X.B. Fluid-structure interaction hydrodynamics analysis on a deformed bionic flipper with non-uniformly distributed stiffness. IEEE Robot Autom. Lett. 2020, 5, 4657–4662. [Google Scholar] [CrossRef]
- Hassan, S.N.H.; Yusof, A.A.; Tuan, T.B.; Saadun, M.N.A.; Ibrahim, M.Q.; Nik, W.M.N.W. Underwater manipulator’s kinematic analysis for sustainable and energy efficient water hydraulics system. AIP Conf. Proc. 2015, 1660, 070112. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Velocity (Kn) | Stage 1 | Stage 2 | Stage 3 | |
|---|---|---|---|---|
| Resistance (N) | 2.5 | 480.60 | 488.68 | 485.22 |
| 3.0 | 695.28 | 709.56 | 701.70 | |
| Torque (N·m) | 2.5 | 238.42 | 169.62 | 61.09 |
| 3.0 | 332.97 | 259.84 | 85.19 |
| Boundary Condition | Unit | Boundary Value |
|---|---|---|
| Turbulence Model | - | SST |
| Flow Domain Dimensions | mm | 20,000 × 18,400 × 23,400 |
| Flow Velocity | Kn | 3.0 |
| Flow Direction | - | −Z |
| Mesh Number | M | 3.59 |
| Mesh Form | - | Polyhedron + Quadrilateral |
| Inlet | - | Velocity Inlet |
| Outlet | - | Pressure Outlet |
| Exterior Domain Surface | - | Wall |
| Stage 1 | Stage 2 | Stage 3 | |
|---|---|---|---|
| Resistance (N) | 698.06 | 689.40 | 645.26 |
| Torque (N·m) | 331.10 | 275.64 | 81.35 |
| Material Parameters | Value | Unit |
|---|---|---|
| Density Young’s Modulus | 2770 7.1 × 1010 | kg/m3 Pa |
| Poisson’s Ratio | 0.33 | (-) |
| Tensile Yield Strength | 2.8 × 108 | Pa |
| Compressive Yield Strength | 2.8 × 108 | Pa |
| Tensile Ultimate Strength | 3.1 × 108 | Pa |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Shen, S.; Wei, W.; Hou, Y.; Huang, Y. Hydrodynamics Analysis of an Underwater Foldable Arm. J. Mar. Sci. Eng. 2023, 11, 1395. https://doi.org/10.3390/jmse11071395
Wang J, Shen S, Wei W, Hou Y, Huang Y. Hydrodynamics Analysis of an Underwater Foldable Arm. Journal of Marine Science and Engineering. 2023; 11(7):1395. https://doi.org/10.3390/jmse11071395
Chicago/Turabian StyleWang, Jiayue, Shengnan Shen, Wei Wei, Yuqing Hou, and Yicang Huang. 2023. "Hydrodynamics Analysis of an Underwater Foldable Arm" Journal of Marine Science and Engineering 11, no. 7: 1395. https://doi.org/10.3390/jmse11071395