
A Spiral-Propulsion Amphibious Intelligent Robot for Land Garbage Cleaning and Sea Garbage Cleaning

Abstract
:1. Introduction
- A mechanical structure based on a spiral drum that provides buoyancy, enabling the robot to traverse both marshy tidal flats and the water surface. This innovative design allows the robot to operate in a variety of environments, overcoming the limitations of traditional garbage cleanup vessels.
- The integration of underwater thrusters that work in conjunction with the spiral drum, further enhancing the robot’s mobility in marine environments.
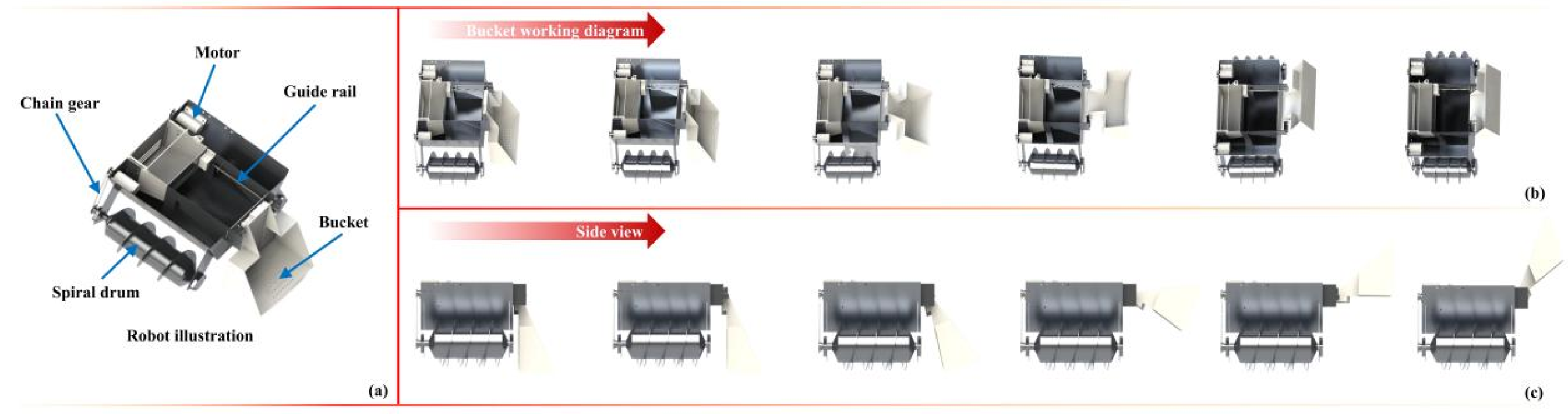
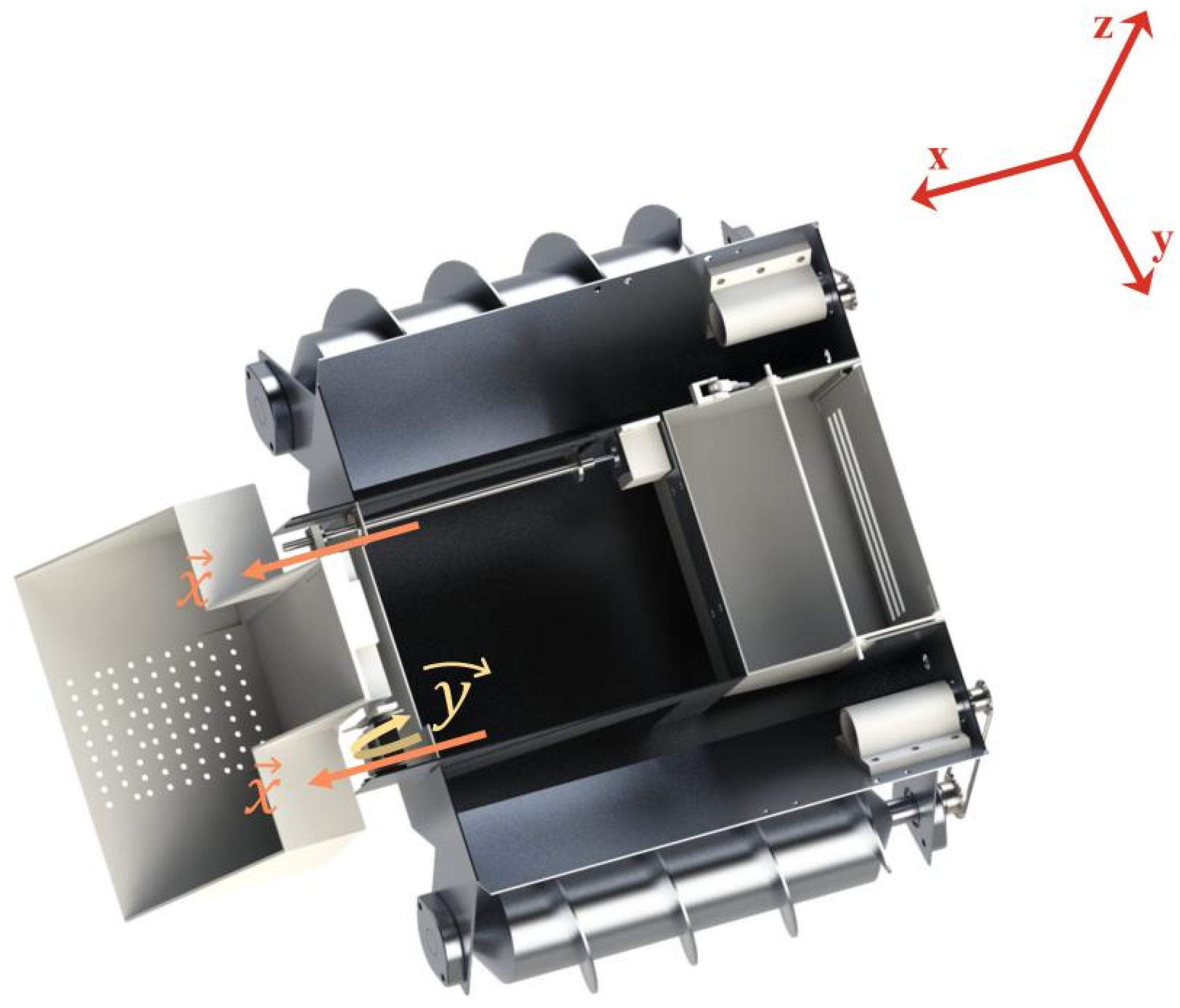
- A specially designed mechanical-arm shovel that achieves two-degrees-of-freedom movement through a spiral spline guide and servo. This unique design feature facilitates efficient garbage collection in challenging environments.
2. Related Work
2.1. Cruising Surface-Garbage-Cleaning Robot
2.2. Barrier-Type Water-Body-Garbage-Cleaning Robot
2.3. Fixed-Type Water-Surface-Garbage-Cleaning Robot
2.4. Beach-Garbage-Cleaning Robot
2.5. Summary
3. Design of Amphibious Robot Structure
3.1. Spiral Propulsion System
3.2. Mechanical Arm-Type Shovel
3.3. Design of the Waterproof Box
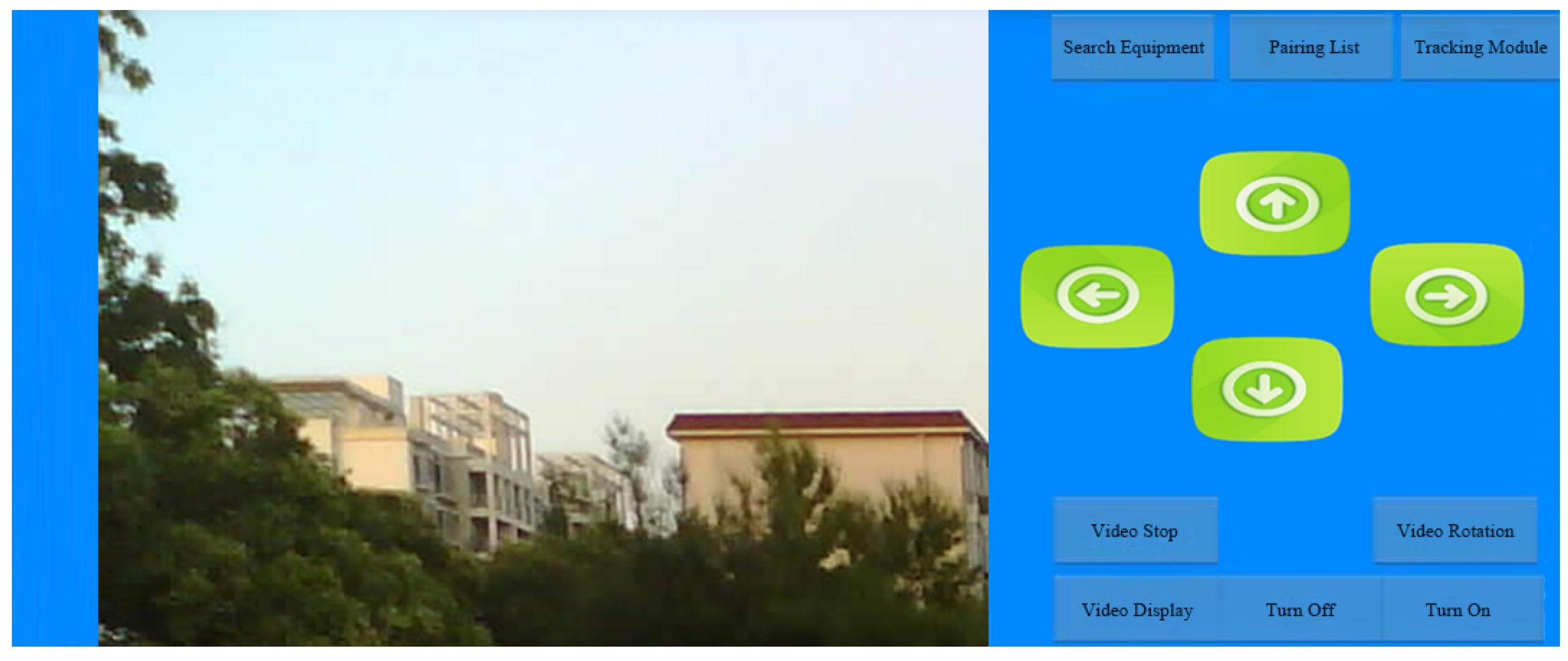
4. The Design of the Control System
5. Experimental Results and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, X.; Hou, Y.; Zhao, C.; Shi, L.; Gong, Y. Research on cooperation mechanism of marine plastic waste management based on complex network evolutionary game. Mar. Policy 2021, 134, 104774. [Google Scholar] [CrossRef]
- Bellou, N.; Gambardella, C.; Karantzalos, K.; Monteiro, J.G.; Canning-Clode, J.; Kemna, S.; Arrieta-Giron, C.A.; Lemmen, C. Global assessment of innovative solutions to tackle marine litter. Nat. Sustain. 2021, 4, 516–524. [Google Scholar] [CrossRef]
- Wang, Z.; Shao, L. Designed mussel-inspired boat for smart crude oil cleanup. In Abstracts of Papers of the American Chemical Society; Amer Chemical Soc.: Washington, DC, USA, 2016; Volume 251. [Google Scholar]
- Williams, A.T.; Rangel-Buitrago, N. Marine litter: Solutions for a major environmental problem. J. Coast. Res. 2019, 35, 648–663. [Google Scholar] [CrossRef] [Green Version]
- Sheavly, S.B.; Register, K.M. Marine debris & plastics: Environmental concerns, sources, impacts and solutions. J. Polym. Environ. 2007, 15, 301–305. [Google Scholar]
- Fallati, L.; Polidori, A.; Salvatore, C.; Saponari, L.; Savini, A.; Galli, P. Anthropogenic Marine Debris assessment with Unmanned Aerial Vehicle imagery and deep learning: A case study along the beaches of the Republic of Maldives. Sci. Total Environ. 2019, 693, 133581. [Google Scholar] [CrossRef] [PubMed]
- Erüz, C.; Terzi, Y.; Ismail, N.P.; Özşeker, K.; Başkan, N.; Karakoç, F.T. From source to sink: A comparative study of streamside and beach litter in the Black Sea. Waste Manag. 2023, 161, 1–9. [Google Scholar] [CrossRef]
- Agenda, I. The New Plastics Economy Rethinking the Future of Plastics; World Economic Forum: Geneva, Switzerland, 2016. [Google Scholar]
- Eriksen, M.; Lebreton, L.C.M.; Carson, H.S.; Thiel, M.; Moore, C.J.; Borerro, J.C.; Galgani, F.; Ryan, P.G.; Reisser, J. Plastic pollution in the world’s oceans: More than 5 trillion plastic pieces weighing over 250,000 tons afloat at sea. PLoS ONE 2014, 9, e111913. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Flores-Ocampo, I.Z.; Armstrong-Altrin, J.S. Abundance and composition of microplastics in Tampico beach sediments, Tamaulipas State, southern Gulf of Mexico. Mar. Pollut. Bull. 2023, 191, 114891. [Google Scholar] [CrossRef]
- Fauziah, S.H.; Rizman-Idid, M.; Cheah, W.; Loh, K.-H.; Sharma, S.; NoorMaiza, M.R.; Bordt, M.; Praphotjanaporn, T.; Samah, A.A.; Shamsuddin bin Sabaruddin, J.; et al. Marine debris in Malaysia: A review on the pollution intensity and mitigating measures. Mar. Pollut. Bull. 2021, 167, 112258. [Google Scholar] [CrossRef]
- Gall, S.C.; Thompson, R.C. The impact of debris on marine life. Mar. Pollut. Bull. 2015, 92, 170–179. [Google Scholar] [CrossRef]
- Maximenko, N.; Corradi, P.; Law, K.L.; Van Sebille, E.; Garaba, S.P.; Lampitt, R.S.; Galgani, F.; Martinez-Vicente, V.; Goddijn-Murphy, L.; Veiga, J.M.; et al. Toward the integrated marine debris observing system. Front. Mar. Sci. 2019, 6, 447. [Google Scholar] [CrossRef] [Green Version]
- Kumar, A.; Sivakumar, R.; Reddy, Y.S.R.; Raja, B.; Nishanth, T.; Revanth, V. Preliminary study on marine debris pollution along Marina beach, Chennai, India. Reg. Stud. Mar. Sci. 2016, 5, 35–40. [Google Scholar]
- Kiessling, T.; Gutow, L.; Thiel, M. Marine litter as habitat and dispersal vector. Mar. Anthropog. Litter 2015, 141–181. [Google Scholar]
- Abreo, N.A.S.; Thompson, K.F.; Arabejo, G.F.P.; Superio, M.D.A. Social media as a novel source of data on the impact of marine litter on megafauna: The Philippines as a case study. Mar. Pollut. Bull. 2019, 140, 51–59. [Google Scholar] [CrossRef]
- Costa, L.L.; Fanini, L.; Ben-Haddad, M.; Pinna, M.; Zalmon, I.R. Marine litter impact on sandy beach fauna: A review to obtain an indication of where research should contribute more. Microplastics 2022, 1, 554–571. [Google Scholar] [CrossRef]
- Brandon, J.A.; Jones, W.; Ohman, M.D. Multidecadal increase in plastic particles in coastal ocean sediments. Sci. Adv. 2019, 5, eaax0587. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Löhr, A.; Savelli, H.; Beunen, R.; Kalz, M.; Ragas, A.; Van Belleghem, F. Solutions for global marine litter pollution. Curr. Opin. Environ. Sustain. 2017, 28, 90–99. [Google Scholar] [CrossRef] [Green Version]
- Dias, L.C.; Cunha, M.C.; Watkins, E.; Triantaphyllidis, G. A multi-criteria assessment of policies to achieve the objectives of the EU marine litter strategy. Mar. Pollut. Bull. 2022, 180, 113803. [Google Scholar] [CrossRef] [PubMed]
- Schneider, F.; Parsons, S.; Clift, S.; Stolte, A.; McManus, M.C. Collected marine litter—A growing waste challenge. Mar. Pollut. Bull. 2018, 128, 162–174. [Google Scholar] [CrossRef]
- Santodomingo, N.; Perry, C.; Waheed, Z.; bin Syed Hussein, M.A.; Rosedy, A.; Johnson, K.G. Marine litter pollution on coral reefs of Darvel Bay (East Sabah, Malaysia). Mar. Pollut. Bull. 2021, 173, 113082. [Google Scholar] [CrossRef]
- Zhu, J.; Yang, Y.; Cheng, Y. SMURF: A Fully Autonomous Water Surface Cleaning Robot with A Novel Coverage Path Planning Method. J. Mar. Sci. Eng. 2022, 10, 1620. [Google Scholar] [CrossRef]
- Jayawant, A.; Sakpal, A. Aqua skimmer for trash collection. Int. J. Appl. Eng. Res. 2018, 13, 5–8. [Google Scholar]
- Priya, J.S.; Balaji, K.T.; Thangappan, S.; Sudhakaran, G.Y. Beach cleaning bot based on region monitoring. In Proceedings of the 2019 International Conference on Computation of Power, Energy, Information and Communication (ICCPEIC), Melmaruvathur, India, 27–28 March 2019. [Google Scholar]
- Phirke, S.; Patel, A.; Jani, J. Design of an autonomous water cleaning bot. Mater. Today Proc. 2021, 46, 8742–8747. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, Y.; Yip, H.W.; Peng, B.; Qiao, S.; He, S. Design and hydrodynamic modeling of a lake surface cleaning robot. In Proceedings of the 2008 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Xi’an, China, 2–5 July 2008. [Google Scholar]
- McIlgorm, A.; Raubenheimer, K.; McIlgorm, D.E.; Nichols, R. The cost of marine litter damage to the global marine economy: Insights from the Asia-Pacific into prevention and the cost of inaction. Mar. Pollut. Bull. 2022, 176, 113954. [Google Scholar] [CrossRef] [PubMed]
- Hansen, S.T.; Pallisgaard, S.; Hansen, K.D. Collection of Aquatic Biomass in Ports using Autonomous Marine Robots-Initial Findings. In Proceedings of the 1st Advanced Marine Robotics TC Workshop: Active Perception, online, 4 June 2021. [Google Scholar]
- Liang, Y.; Liu, C.; He, T.; Wang, L.; Luo, Y.; Hou, M. Design of water surface collection robot based on deep sea cage culture. J. Phys. Conf. Ser. 2022, 2229, 012005. [Google Scholar] [CrossRef]
- Kong, S.; Tian, M.; Qiu, C.; Wu, Z.; Yu, J. IWSCR: An Intelligent Water Surface Cleaner Robot for Collecting Floating Garbage. IEEE Trans. Syst. Man, Cybern. Syst. 2020, 51, 6358–6368. [Google Scholar] [CrossRef]
- Vigneswaran, C.; Afifah Zaynab, M.; Keerthana, J.; Harish Krishna, R.; Hariharan, R. Design and Development of River Water Trash Collector for a Sustainable Environment. In Materials, Design and Manufacturing for Sustainable Environment; Natarajan, E., Vinodh, S., Rajkumar, V., Eds.; Springer: Singapore, 2007; pp. 32–58. [Google Scholar]
- Tovar, E. Catamaran Sargassum Cleaning System “CSC Integrated System” Conceptual Engineering. In Proceedings of the SNAME Maritime Convention, Providence, RI, USA, 18 October 2021. [Google Scholar]
- Parker-Jurd, F.N.; Smith, N.S.; Gibson, L.; Nuojua, S.; Thompson, R.C. Evaluating the performance of the ’Seabin’—A fixed point mechanical litter removal device for sheltered waters. Mar. Pollut. Bull. 2022, 184, 114199. [Google Scholar] [CrossRef]
- Yadav, K.A.; Singh, A.; Murtaza, A.M.; Singh, K.A. Eco beach cleaner. Int. J. Eng. Manag. Res. 2018. [Google Scholar] [CrossRef]
- Bano, N.; Amin, A.; Boghani, H.; Tariq, H.; Bakhtawar, S.; Waggan, I.; Younas, T. Radio Controlled Beach Cleaning Bot. In Proceedings of the 2019 IEEE 6th International Conference on Engineering Technologies and Applied Sciences (ICETAS), Kuala Lumpur, Malaysia, 20–21 December 2019. [Google Scholar]
- Ichimura, T.; Nakajima, S.-I. Development of an autonomous beach cleaning robot “Hirottaro”. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016. [Google Scholar]
- Boiko, N.G.; Nechepaev, V.G. Formation of working size of helical drum for unloading coal to a conveyor. Izv. Vyssh. Uchebn. Zaved. Gorn. Zh. 1982, 6, 78–80. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Parameter | Test 1 | Test 2 | Test 3 | Test 4 |
|---|---|---|---|---|
| Drum Speed | 0.50 r/s | 0.50 r/s | 0.60 r/s | 0.53 r/s |
| Land Movement Speed | 0.27 m/s | 0.31 m/s | 0.29 m/s | 0.34 m/s |
| Water Surface Movement Speed | 0.39 m/s | 0.25 m/s | 0.34 m/s | 0.33 m/s |
| Parameter | Length | Width (Diameter) | Height |
|---|---|---|---|
| Main Body | 0.50 m | 0.53 m | 0.33 m |
| Drum | 0.50 m | 0.11 m | - |
| Shovel | 0.20 m | 0.34 m | 0.30 m |
| Guide Rail | 0.30 m | - | - |
| Screw Mechanism | 0.30 m/s | 0.008 m/s | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Huang, Z.; Chen, C.; Wu, X.; Xie, S.; Zhou, H.; Gou, Y.; Gu, L.; Ma, M. A Spiral-Propulsion Amphibious Intelligent Robot for Land Garbage Cleaning and Sea Garbage Cleaning. J. Mar. Sci. Eng. 2023, 11, 1482. https://doi.org/10.3390/jmse11081482
Zhang Y, Huang Z, Chen C, Wu X, Xie S, Zhou H, Gou Y, Gu L, Ma M. A Spiral-Propulsion Amphibious Intelligent Robot for Land Garbage Cleaning and Sea Garbage Cleaning. Journal of Marine Science and Engineering. 2023; 11(8):1482. https://doi.org/10.3390/jmse11081482
Chicago/Turabian StyleZhang, Yanghai, Zan Huang, Changlin Chen, Xiangyu Wu, Shuhang Xie, Huizhan Zhou, Yihui Gou, Liuxin Gu, and Mengchao Ma. 2023. "A Spiral-Propulsion Amphibious Intelligent Robot for Land Garbage Cleaning and Sea Garbage Cleaning" Journal of Marine Science and Engineering 11, no. 8: 1482. https://doi.org/10.3390/jmse11081482