
Application of an Encoder–Decoder Model with Attention Mechanism for Trajectory Prediction Based on AIS Data: Case Studies from the Yangtze River of China and the Eastern Coast of the U.S




Abstract
:1. Introduction
2. Literature Review
2.1. Trajectory Prediction Based on Kinematics Models
2.2. Trajectory Prediction Based on Machine Learning Techniques
3. Methodology
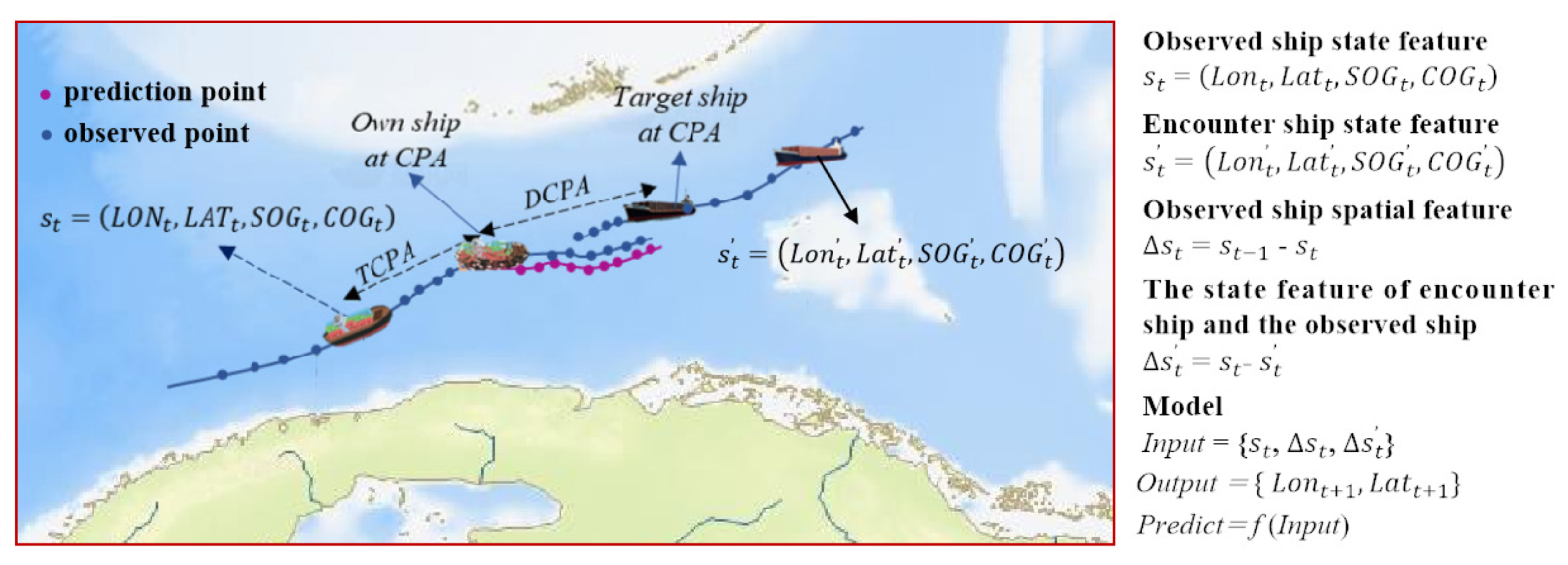
3.1. Problem Statement
3.2. Methodology Design of Ship Trajectory Prediction
3.3. Design of the Encoder–Decoder Learning Model
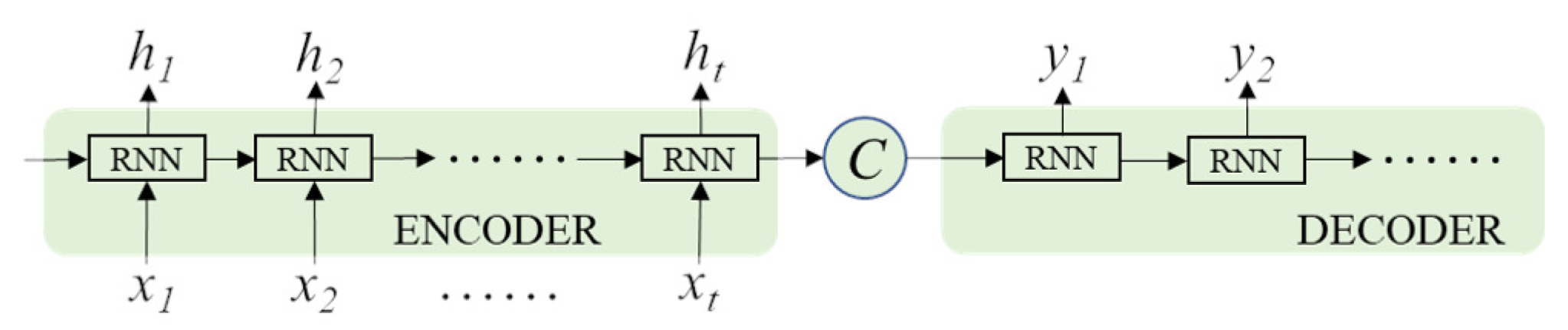
3.3.1. LSTM-Based Sequence to Sequence
- to represent the input sequence characteristic information of the model;
- to are the outputs of each circulating neural network cell;
- and represent the label sequence of the model output;
- The variable C between the encoder and decoder represents the sequence information representation obtained by passing the input feature sequence information through the encoder.
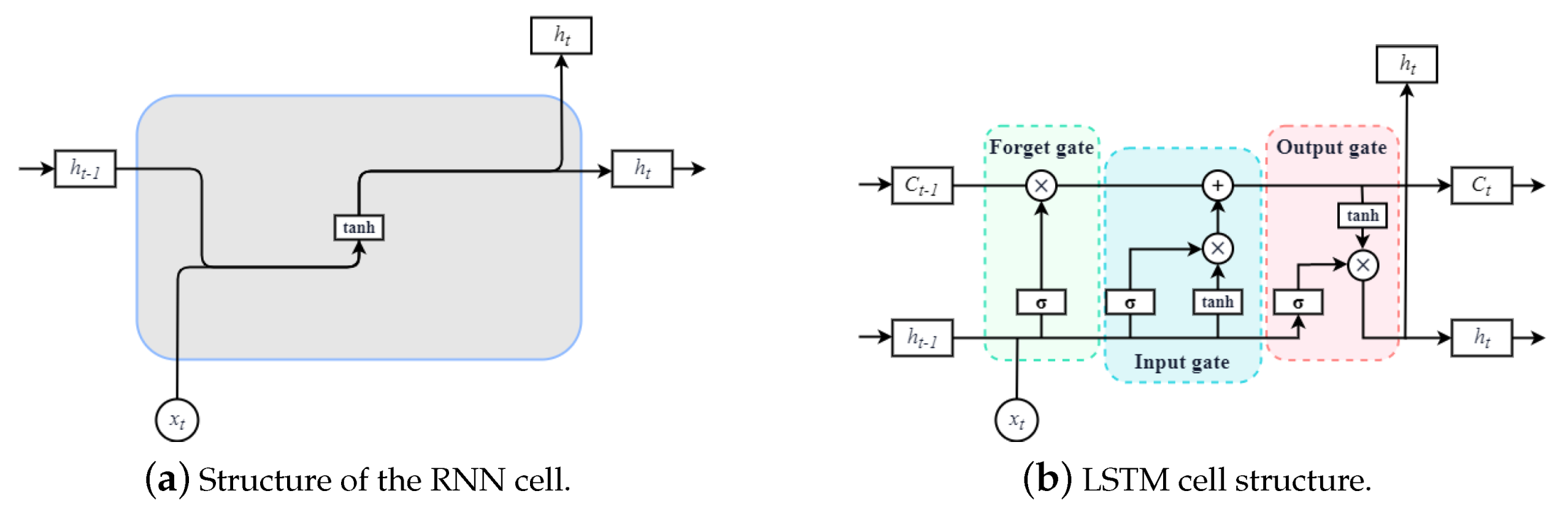
- a.
- Forget gate. , , and are used as inputs to calculate the amount of information (value is between 0 and 1) to be forgotten.
- b.
- c.
- Output gate. and are input to the sigmoid function to obtain the output information . The product of the output information and activated value of the current updated state is the information carried by the internal state at the current time as the output information at time t.
3.3.2. Attention Mechanism
3.3.3. Feature Fusion Layer
4. Numerical Experiments
4.1. Data Description
4.2. Setting of Experiments
4.2.1. Criterion of Model Evaluation
4.2.2. Model Parameter Setting
4.2.3. Introduction of Baseline Methods
- (1)
- The BPNN has the classic three layers: input layer, hidden layer, and output layer (see Figure 9a). In its network structure, the neurons are connected from the input layer to the output layer;
- (2)
- (3)
- (4)
- EncDec-ATTN is a deep learning method used for ship trajectory prediction based on recurrent neural networks and was proposed by Capobianco et al. [28]. This method can learn spatiotemporal correlations from historical ship mobility data and predict future ship trajectories.
4.3. Prediction Analysis and Result Discussion
4.3.1. Analysis of Model Performance
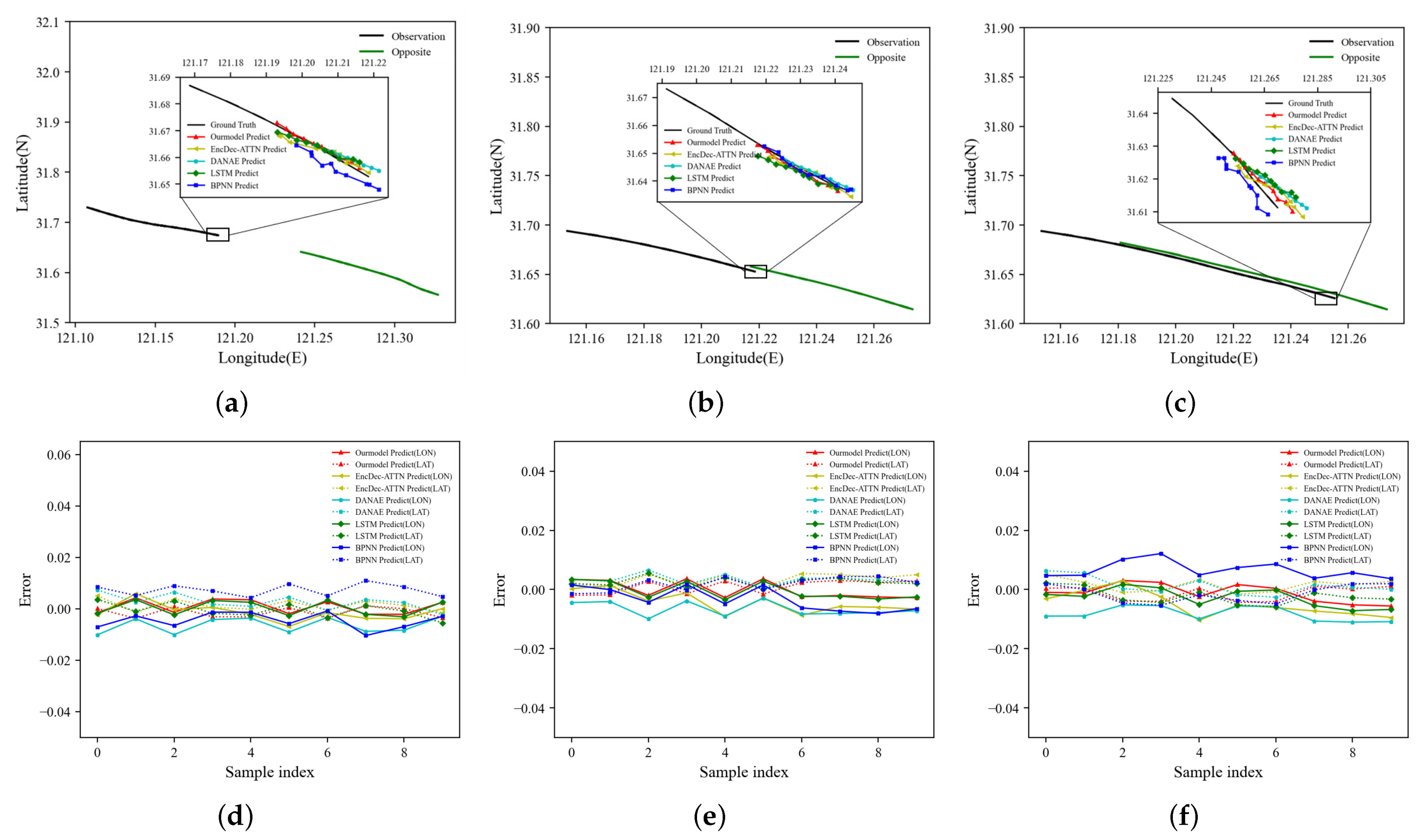
4.3.2. Discussion of the Prediction Results
4.3.3. Analysis of the Attention Mechanism with the Weight Score
4.3.4. Analysis of Model Validation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mou, J.M.; van der Tak, C.; Ligteringen, H. Study on collision avoidance in busy waterways by using AIS data. Ocean Eng. 2010, 37, 483–490. [Google Scholar] [CrossRef]
- Tu, E.; Zhang, G.; Rachmawati, L.; Rajabally, E.; Huang, G.B. Exploiting AIS Data for Intelligent Maritime Navigation: A Comprehensive Survey From Data to Methodology. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1559–1582. [Google Scholar] [CrossRef]
- Zhu, Y.; Zuo, Y.; Li, T. Modeling of Ship Fuel Consumption Based on Multisource and Heterogeneous Data: Case Study of Passenger Ship. J. Mar. Sci. Eng. 2021, 9, 273. [Google Scholar] [CrossRef]
- Li, X.; Zuo, Y.; Jiang, J. Application of Regression Analysis Using Broad Learning System for Time-Series Forecast of Ship Fuel Consumption. Sustainability 2023, 15, 380. [Google Scholar] [CrossRef]
- Cockcroft, A.; Lameijer, J. Part B—Steering and sailing rules. In A Guide to the Collision Avoidance Rules, 7th ed.; Cockcroft, A., Lameijer, J., Eds.; Butterworth-Heinemann: Oxford, UK, 2012; pp. 11–104. [Google Scholar]
- Huang, Y.; van Gelder, P.; Wen, Y. Velocity obstacle algorithms for collision prevention at sea. Ocean Eng. 2018, 151, 308–321. [Google Scholar] [CrossRef]
- Lehtola, V.; Montewka, J.; Goerlandt, F.; Guinness, R.; Lensu, M. Finding safe and efficient shipping routes in ice-covered waters: A framework and a model. Cold Reg. Sci. Tech. 2019, 165, 102795. [Google Scholar] [CrossRef]
- Park, S.W.; Park, Y.S. Predicting Dangerous Traffic Intervals between Ships in Vessel Traffic Service Areas Using a Poisson Distribution. J. Korean Soc. Mar. Environ. Saf. 2016, 22, 402–409. [Google Scholar] [CrossRef]
- Ristic, B.; La Scala, B.; Morelande, M.; Gordon, N. Statistical analysis of motion patterns in AIS Data: Anomaly detection and motion prediction. In Proceedings of the 2008 11th International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008; pp. 1–7. [Google Scholar]
- Rong Li, X.; Jilkov, V. Survey of maneuvering target tracking. Part I. Dynamic models. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1333–1364. [Google Scholar] [CrossRef]
- Mazzarella, F.; Arguedas, V.F.; Vespe, M. Knowledge-based vessel position prediction using historical AIS data. In Proceedings of the 2015 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 6–8 October 2015; pp. 1–6. [Google Scholar]
- Ma, X.; Liu, G.; He, B.; Zhang, K.; Zhang, X.; Zhao, X. Trajectory Prediction Algorithm Based on Variational Bayes. In Proceedings of the 2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), Xiamen, China, 10–12 August 2018; pp. 1–6. [Google Scholar]
- Rong, H.; Teixeira, A.; Guedes Soares, C. Ship trajectory uncertainty prediction based on a Gaussian Process model. Ocean Eng. 2019, 182, 499–511. [Google Scholar] [CrossRef]
- Barrios, C.; Motai, Y. Improving Estimation of Vehicle’s Trajectory Using the Latest Global Positioning System With Kalman Filtering. IEEE Trans. Instrum. Meas. 2011, 60, 3747–3755. [Google Scholar] [CrossRef]
- Perera, L.P.; Oliveira, P.; Guedes Soares, C. Maritime Traffic Monitoring Based on Vessel Detection, Tracking, State Estimation, and Trajectory Prediction. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1188–1200. [Google Scholar] [CrossRef]
- Hexeberg, S.; Flåten, A.L.; Eriksen, B.O.H.; Brekke, E.F. AIS-based vessel trajectory prediction. In Proceedings of the 2017 20th International Conference on Information Fusion (Fusion), Xi’an, China, 10–13 July 2017; pp. 1–8. [Google Scholar]
- Guo, S.; Liu, C.; Guo, Z.; Feng, Y.; Hong, F.; Huang, H. Trajectory Prediction for Ocean Vessels Base on K-order Multivariate Markov Chain. In Proceedings of the Wireless Algorithms, Systems, and Applications; Chellappan, S., Cheng, W., Li, W., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 140–150. [Google Scholar]
- Gao, D.W.; Zhu, Y.S.; Zhang, J.F.; He, Y.K.; Yan, K.; Yan, B.R. A novel MP-LSTM method for ship trajectory prediction based on AIS data. Ocean Eng. 2021, 228, 108956. [Google Scholar] [CrossRef]
- Liu, J.; Shi, G.; Zhu, K. Online Multiple Outputs Least-Squares Support Vector Regression Model of Ship Trajectory Prediction Based on Automatic Information System Data and Selection Mechanism. IEEE Access 2020, 8, 154727–154745. [Google Scholar] [CrossRef]
- Murray, B.; Perera, L.P. A Data-Driven Approach to Vessel Trajectory Prediction for Safe Autonomous Ship Operations. In Proceedings of the 2018 Thirteenth International Conference on Digital Information Management (ICDIM), Berlin, Germany, 24–26 September 2018; pp. 240–247. [Google Scholar]
- Valsamis, A.; Tserpes, K.; Zissis, D.; Anagnostopoulos, D.; Varvarigou, T. Employing traditional machine learning algorithms for big data streams analysis: The case of object trajectory prediction. J. Syst. Softw. 2017, 127, 249–257. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Ni, G.; Xu, Y. Trajectory prediction based on AIS and BP neural network. In Proceedings of the 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 11–13 December 2020; Volume 9, pp. 601–605. [Google Scholar]
- Zhao, Y.; Cui, J.; Yao, G. Online Learning based GA-BP Neural Network to Predict Ship Trajectory. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 3731–3735. [Google Scholar]
- Tang, H.; Yin, Y.; Shen, H. A model for vessel trajectory prediction based on long short-term memory neural network. J. Mar. Eng. Technol. 2022, 21, 136–145. [Google Scholar] [CrossRef]
- Qian, L.; Zheng, Y.; Li, L.; Ma, Y.; Zhou, C.; Zhang, D. A New Method of Inland Water Ship Trajectory Prediction Based on Long Short-Term Memory Network Optimized by Genetic Algorithm. Appl. Sci. 2022, 12, 4073. [Google Scholar] [CrossRef]
- Ma, H.; Zuo, Y.; Li, T. Vessel Navigation Behavior Analysis and Multiple-Trajectory Prediction Model Based on AIS Data. J. Adv. Transp. 2022, 2022, 6622862. [Google Scholar] [CrossRef]
- Zhang, X.; Fu, X.; Xiao, Z.; Xu, H.; Qin, Z. Vessel Trajectory Prediction in Maritime Transportation: Current Approaches and Beyond. IEEE Trans. Intell. Transp. Syst. 2022, 23, 19980–19998. [Google Scholar] [CrossRef]
- Capobianco, S.; Millefiori, L.M.; Forti, N.; Braca, P.; Willett, P. Deep Learning Methods for Vessel Trajectory Prediction Based on Recurrent Neural Networks. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 4329–4346. [Google Scholar] [CrossRef]
- Donandt, K.; Böttger, K.; Söffker, D. Short-term Inland Vessel Trajectory Prediction with Encoder-Decoder Models. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 974–979. [Google Scholar]
- Sutskever, I.; Vinyals, O.; Le, Q.V. Sequence to Sequence Learning with Neural Networks. In Proceedings of the 27th International Conference on Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 2014; pp. 3104–3112. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention is All You Need. In Proceedings of the 31st International Conference on Neural Information Processing Systems; Curran Associates Inc.: Red Hook, NY, USA, 2017; pp. 6000–6010. [Google Scholar]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the Dimensionality of Data with Neural Networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [Green Version]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Chiu, C.C.; Sainath, T.N.; Wu, Y.; Prabhavalkar, R.; Nguyen, P.; Chen, Z.; Kannan, A.; Weiss, R.J.; Rao, K.; Gonina, E.; et al. State-of-the-Art Speech Recognition with Sequence-to-Sequence Models. In Proceedings of the 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018; pp. 4774–4778. [Google Scholar]
- Forti, N.; Millefiori, L.M.; Braca, P.; Willett, P. Prediction oof Vessel Trajectories From AIS Data Via Sequence-To-Sequence Recurrent Neural Networks. In Proceedings of the 2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 8936–8940. [Google Scholar]
- Bahdanau, D.; Cho, K.; Bengio, Y. Neural Machine Translation by Jointly Learning to Align and Translate. In Proceedings of the 2015 3rd International Conference on Learning Representations (ICLR), San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Luong, T.; Pham, H.; Manning, C.D. Effective Approaches to Attention-based Neural Machine Translation. In Proceedings of the 2015 Conference on Empirical Methods in Natural Language Processing; Association for Computational Linguistics: Lisbon, Portugal, 2015; pp. 1412–1421. [Google Scholar]
- Jiang, D.; Shi, G.; Li, N.; Ma, L.; Li, W.; Shi, J. TRFM-LS: Transformer-Based Deep Learning Method for Vessel Trajectory Prediction. J. Mar. Sci. Eng. 2023, 11, 880. [Google Scholar] [CrossRef]
- Altan, D.; Marijan, D.; Kholodna, T. SafeWay: Improving the safety of autonomous waypoint detection in maritime using transformer and interpolation. Marit. Transp. Res. 2023, 4, 100086. [Google Scholar] [CrossRef]
- Jiang, J.; Zuo, Y. Prediction of Ship Trajectory in Nearby Port Waters Based on Attention Mechanism Model. Sustainability 2023, 15, 7435. [Google Scholar] [CrossRef]
- Capobianco, S.; Forti, N.; Millefiori, L.M.; Braca, P.; Willett, P. Recurrent Encoder—Decoder Networks for Vessel Trajectory Prediction With Uncertainty Estimation. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 2554–2565. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. In Proceedings of the 2015 3rd International Conference on Learning Representations (ICLR), San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A Simple Way to Prevent Neural Networks from Overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Vincent, P.; Larochelle, H.; Bengio, Y.; Manzagol, P.A. Extracting and Composing Robust Features with Denoising Autoencoders. In Proceedings of the 25th International Conference on Machine Learning; Association for Computing Machinery: New York, NY, USA, 2008; pp. 1096–1103. [Google Scholar]
- Russo, P.; Ciaccio, F.D.; Troisi, S. DANAE: A denoising autoencoder for underwater attitude estimation. In Proceedings of the 2020 IMEKO TC-19 International Workshop on Metrology for the Sea, Naples, Italy, 5–7 October 2020; pp. 195–198. [Google Scholar]
- Russo, P.; Di Ciaccio, F.; Troisi, S. DANAE++: A Smart Approach for Denoising Underwater Attitude Estimation. Sensors 2021, 21, 1526. [Google Scholar] [CrossRef]
- Lee, J.; Shin, J.H.; Kim, J.S. Interactive Visualization and Manipulation of Attention-based Neural Machine Translation. In Proceedings of the 2017 Conference on Empirical Methods in Natural Language: System Demonstrations, Copenhagen, Denmark, 9–11 September 2017; Association for Computational Linguistics: Copenhagen, Denmark, 2017; pp. 121–126. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Water Area | MMSI | Number of AIS Points | Date | References |
|---|---|---|---|---|
| Yangtze River Delta | 413450480 | 2124 | 1 February 2019 | Figure 8a |
| 413425610 | 1529 | |||
| 414386000 | 912 | 28 June 2019 | ||
| 312958000 | 786 | |||
| 413556520 | 257 | 2 January 2022 | ||
| 413585000 | 207 | |||
| Eastern Coastal Area of the United States | 367185680 | 1440 | 2 February 2019 | Figure 8b |
| 304604000 | 823 | |||
| 372821000 | 1180 | 31 December 2021 | ||
| 311000375 | 669 | |||
| 316001635 | 1112 | 2 January 2022 | ||
| 316044371 | 1440 |
| Parameters | Optimization Range | Interval Granularity | Head-On Situation 1 | Head-On Situation 2 |
|---|---|---|---|---|
| Dropout rate | (0.1, 0.5) | 0.1 | - | - |
| Learning rate | (0.0001, 0.1) | 0.0001 | 0.002 | 0.002 |
| No. of LSTM layers | (1, 3) | 1 | 3 | 3 |
| No. of hidden cells | (32, 320) | 32 | 128 | 128 |
| No. of MHSA head | (2, 10) | 1 | 2 | 2 |
| Regularization parameter | (0.01, 1) | 0.01 | 0.001 | 0.001 |
| Model | Position | MSE | MAE | HADE | Optimal Parameter | |
|---|---|---|---|---|---|---|
| Head-on Situation 1 from Yangtze River delta | BPNN | LON | 3.1854 × | 0.0110 | 1256.0985 | 3, (128, 64, 32), 0.01, 0.002 |
| LAT | 3.2575 × | 0.0113 | ||||
| LSTM | LON | 1.4240 × | 0.0093 | 1072.9199 | 3, (128, 128, 128), 0.01, 0.002 | |
| LAT | 1.5876 × | 0.0096 | ||||
| DANAE | LON | 1.2190 × | 0.0074 | 890.1905 | 3, (128, 64, 10), 0.001, 0.002 | |
| LAT | 1.5209 × | 0.0085 | ||||
| EncDec-ATTN | LON | 4.5361 × | 0.0051 | 612.8078 | 2, (128, 128), 0.002, 0.001 | |
| LAT | 5.4565 × | 0.0057 | ||||
| Our Model | LON | 2.5220 × | 0.0041 | 480.3572 | 3, (128, 128, 128), 0.002, 0.001 | |
| LAT | 2.8857 × | 0.0042 | ||||
| Head-on Situation 2 from eastern coastal area of the United States | BPNN | LON | 3.8615 × | 0.0197 | 1366.2123 | 3, (128, 64, 32), 0.01, 0.002 |
| LAT | 3.6022 × | 0.0190 | ||||
| LSTM | LON | 1.9693 × | 0.0107 | 1045.1206 | 3, (128, 128, 128), 0.01, 0.002 | |
| LAT | 1.6729 × | 0.0105 | ||||
| DANAE | LON | 9.1580 × | 0.0077 | 670.2299 | 3, (128, 64, 10), 0.001, 0.002 | |
| LAT | 9.7660 × | 0.0082 | ||||
| EncDec-ATTN | LON | 5.8020 × | 0.0058 | 493.7096 | 2, (128, 128), 0.002, 0.001 | |
| LAT | 5.0178 × | 0.0056 | ||||
| Our Model | LON | 3.0541 × | 0.0042 | 422.7494 | 3, (128, 128, 128), 0.002, 0.001 | |
| LAT | 3.8907 × | 0.0044 |
| Model | Position | MSE | MAE | HADE | Optimal Parameter | |
|---|---|---|---|---|---|---|
| Head-on Situation 1 from Yangtze River delta | Seq2Seq | LON | 9.0469 × | 0.0075 | 845.4042 | 3, (128, 128, 128), 0.01, 0.002 |
| LAT | 9.2702 × | 0.0074 | ||||
| Seq2Seq-ATTN | LON | 5.7978 × | 0.0061 | 717.5646 | 3, (128, 128, 128), 0.01, 0.002 | |
| LAT | 6.4726 × | 0.0064 | ||||
| Seq2Seq-MHSA | LON | 4.5202 × | 0.0051 | 608.6507 | 3, (128, 128, 128), 0.01, 0.002 | |
| LAT | 5.2463 × | 0.0055 | ||||
| Our Model | LON | 2.5220 × | 0.0041 | 480.3572 | 3, (128, 128, 128), 0.002, 0.001 | |
| LAT | 2.8857 × | 0.0042 | ||||
| Head-on Situation 2 from eastern coastal area of the United States | Seq2Seq | LON | 9.3664 × | 0.0077 | 758.1244 | 3, (128, 128, 128), 0.01, 0.002 |
| LAT | 1.1874 × | 0.0078 | ||||
| Seq2Seq-ATTN | LON | 9.0765 × | 0.0065 | 629.4445 | 3, (128, 128, 128), 0.01, 0.002 | |
| LAT | 7.0376 × | 0.0058 | ||||
| Seq2Seq-MHSA | LON | 4.6450 × | 0.0050 | 512.9711 | 3, (128, 128, 128), 0.01, 0.002 | |
| LAT | 5.4739 × | 0.0057 | ||||
| Our Model | LON | 3.0541 × | 0.0042 | 422.7494 | 3, (128, 128, 128), 0.002, 0.001 | |
| LAT | 3.8907 × | 0.0044 |
| Model | Position | Test Sample 1 | Test Sample 2 | |||||
|---|---|---|---|---|---|---|---|---|
| MSE | MAE | HADE | MSE | MAE | HADE | |||
| Yangtze River delta | BPNN | LON | 5.5900 × | 0.0137 | 537.5320 | 4.7147 × | 0.0217 | 853.0951 |
| LAT | 5.8601 × | 0.0142 | 5.1134 × | 0.0226 | ||||
| LSTM | LON | 1.6606 × | 0.0102 | 399.8864 | 2.6896 × | 0.0116 | 640.3072 | |
| LAT | 1.7191 × | 0.0108 | 3.2279 × | 0.0129 | ||||
| Seq2Seq | LON | 8.5295 × | 0.0075 | 296.0660 | 9.9816 × | 0.0078 | 485.1224 | |
| LAT | 9.2641 × | 0.0078 | 1.0563 × | 0.0080 | ||||
| Seq2Seq-ATTN | LON | 7.3838 × | 0.0069 | 264.7203 | 8.0580 × | 0.0071 | 414.3751 | |
| LAT | 7.6468 × | 0.0069 | 8.4536 × | 0.0071 | ||||
| Seq2Seq-MHSA | LON | 5.0014 × | 0.0056 | 215.3634 | 6.2602 × | 0.0061 | 350.034 | |
| LAT | 4.4967 × | 0.0055 | 6.7629 × | 0.0065 | ||||
| DANAE | LON | 1.2231 × | 0.0074 | 301.2500 | 1.3935 × | 0.0083 | 495.0518 | |
| LAT | 2.1533 × | 0.0083 | 8.8652 × | 0.0083 | ||||
| EncDec-ATTN | LON | 5.2074 × | 0.0055 | 218.4405 | 5.6014 × | 0.0057 | 334.0571 | |
| LAT | 5.7575 × | 0.0058 | 7.9404 × | 0.0068 | ||||
| Our Model | LON | 3.2121 × | 0.0044 | 174.3734 | 2.9485 × | 0.0044 | 250.2701 | |
| LAT | 3.5942 × | 0.0045 | 3.5306 × | 0.0048 | ||||
| Eastern Coastal Area of the United States | BPNN | LON | 5.4331 × | 0.0233 | 924.1445 | 5.2985 × | 0.0160 | 1356.0606 |
| LAT | 6.2152 × | 0.0249 | 5.7272 × | 0.0168 | ||||
| LSTM | LON | 1.9752 × | 0.0108 | 767.8572 | 1.5630 × | 0.0100 | 1090.1046 | |
| LAT | 2.3233 × | 0.0111 | 1.3083 × | 0.0097 | ||||
| Seq2Seq | LON | 5.8735 × | 0.0062 | 586.9804 | 1.0423 × | 0.0078 | 880.4276 | |
| LAT | 9.7247 × | 0.0076 | 9.0954 × | 0.0076 | ||||
| Seq2Seq-ATTN | LON | 5.0514 × | 0.0056 | 520.9248 | 7.4921 × | 0.0066 | 745.4695 | |
| LAT | 7.4168 × | 0.0068 | 6.4257 × | 0.0065 | ||||
| Seq2Seq-MHSA | LON | 4.6845 × | 0.0049 | 383.6337 | 4.7334 × | 0.0053 | 621.6424 | |
| LAT | 5.7935 × | 0.0059 | 5.1199 × | 0.0054 | ||||
| DANAE | LON | 9.3591 × | 0.0072 | 629.2457 | 1.2319 × | 0.0081 | 864.9335 | |
| LAT | 1.2229 × | 0.0084 | 9.7121 × | 0.0074 | ||||
| EncDec-ATTN | LON | 4.5829 × | 0.0056 | 421.0406 | 5.0587 × | 0.0055 | 632.9389 | |
| LAT | 5.6622 × | 0.0056 | 4.9324 × | 0.0057 | ||||
| Our Model | LON | 2.9595 × | 0.0043 | 358.1493 | 3.2749 × | 0.0043 | 487.4037 | |
| LAT | 4.1747 × | 0.0048 | 3.5261 × | 0.0042 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Zuo, Y.; Li, T.; Chen, C.L.P. Application of an Encoder–Decoder Model with Attention Mechanism for Trajectory Prediction Based on AIS Data: Case Studies from the Yangtze River of China and the Eastern Coast of the U.S. J. Mar. Sci. Eng. 2023, 11, 1530. https://doi.org/10.3390/jmse11081530
Zhao L, Zuo Y, Li T, Chen CLP. Application of an Encoder–Decoder Model with Attention Mechanism for Trajectory Prediction Based on AIS Data: Case Studies from the Yangtze River of China and the Eastern Coast of the U.S. Journal of Marine Science and Engineering. 2023; 11(8):1530. https://doi.org/10.3390/jmse11081530
Chicago/Turabian StyleZhao, Licheng, Yi Zuo, Tieshan Li, and C. L. Philip Chen. 2023. "Application of an Encoder–Decoder Model with Attention Mechanism for Trajectory Prediction Based on AIS Data: Case Studies from the Yangtze River of China and the Eastern Coast of the U.S" Journal of Marine Science and Engineering 11, no. 8: 1530. https://doi.org/10.3390/jmse11081530
APA StyleZhao, L., Zuo, Y., Li, T., & Chen, C. L. P. (2023). Application of an Encoder–Decoder Model with Attention Mechanism for Trajectory Prediction Based on AIS Data: Case Studies from the Yangtze River of China and the Eastern Coast of the U.S. Journal of Marine Science and Engineering, 11(8), 1530. https://doi.org/10.3390/jmse11081530