
Route Planning of a Polar Cruise Ship Based on the Experimental Prediction of Propulsion Performance in Ice


Abstract
:1. Introduction
2. Propulsion Tests in Ice Tank
2.1. Test Facility and Ship Model
2.2. Model Ice
2.3. Scaling Laws
2.4. Test Conditions and Procedure
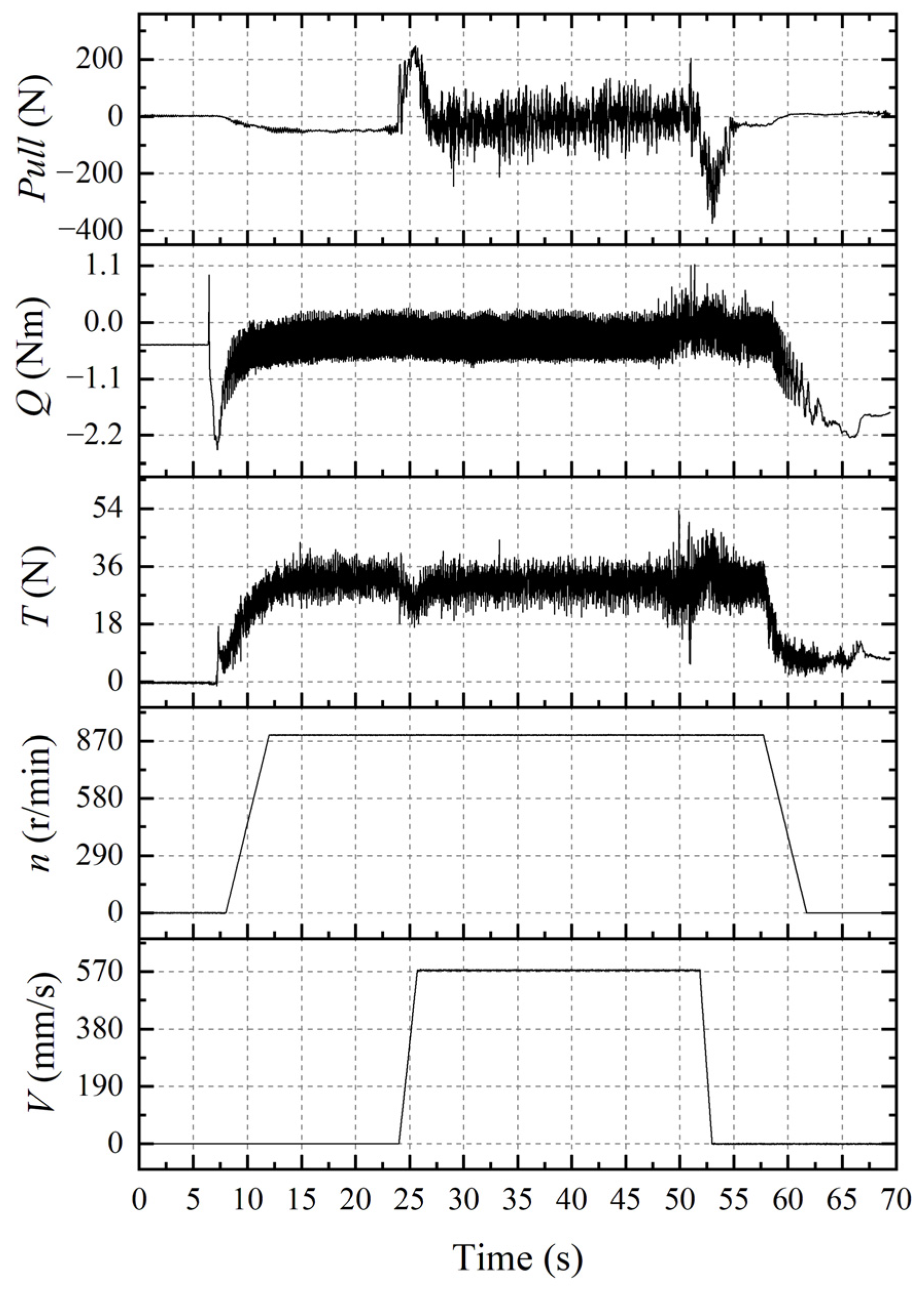
2.5. Test Results
3. Risk Assessment and Speed Design Based on Propulsion Performance
3.1. P–V Relations Based on Test Results
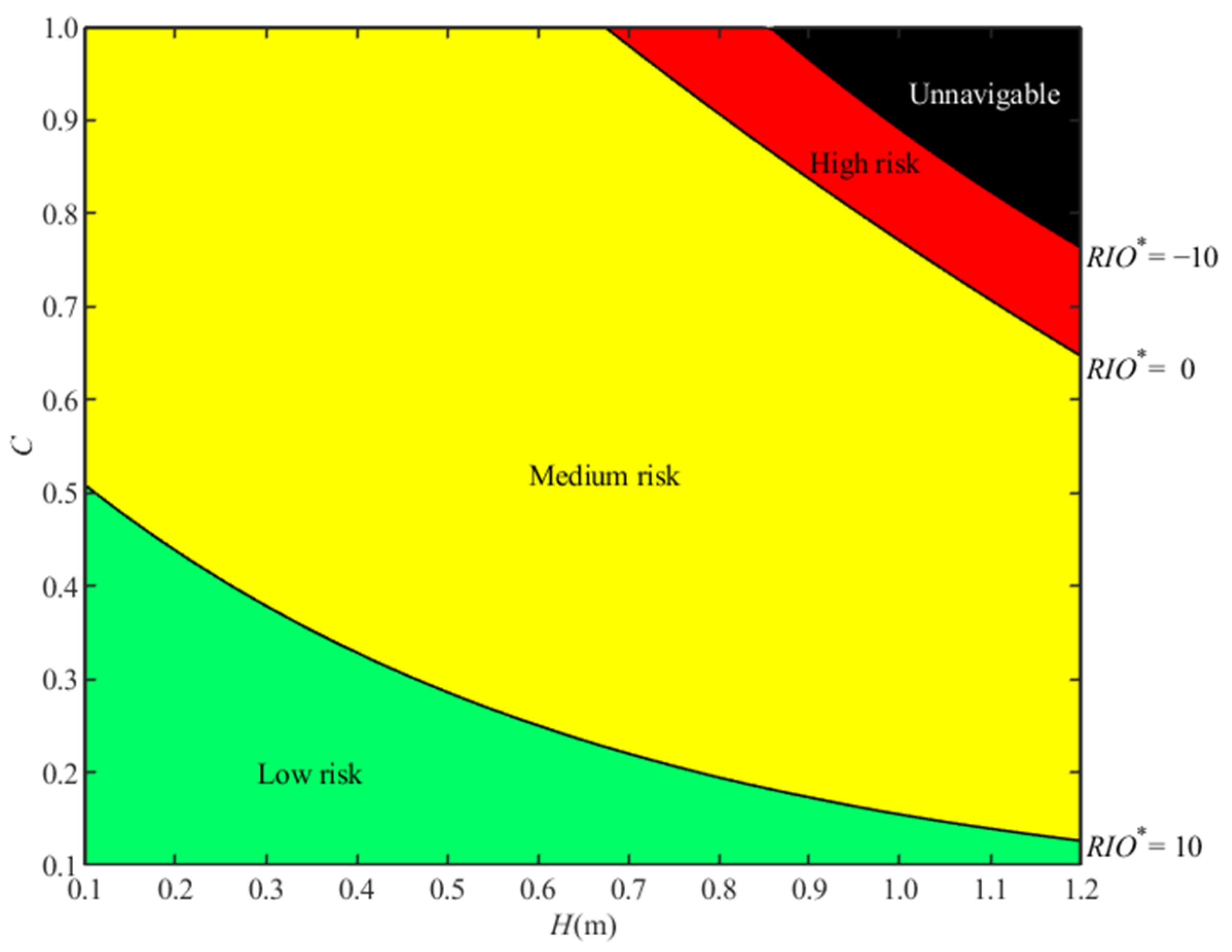
3.2. PD-Based Navigational Risk Levels
- i.
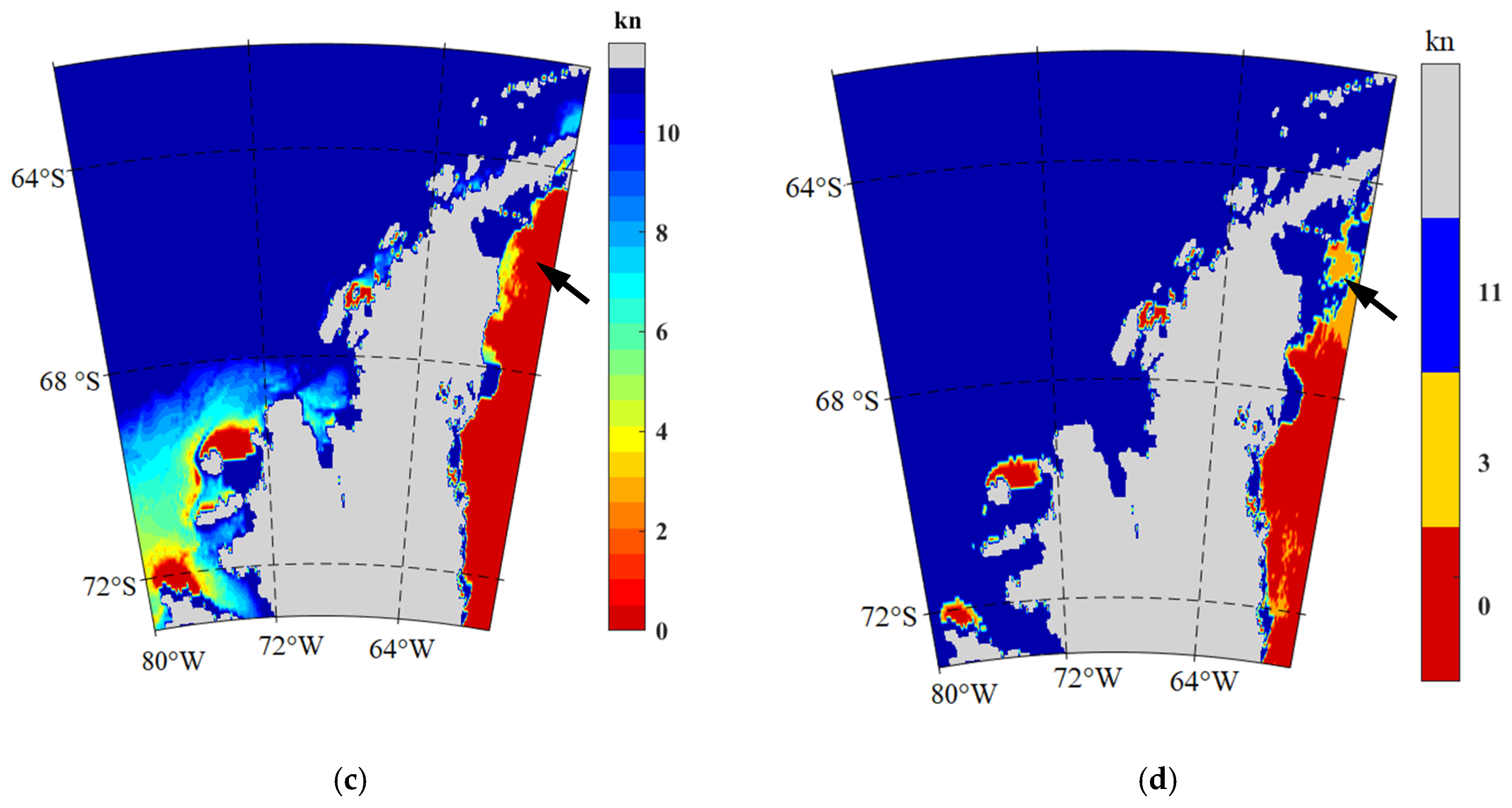
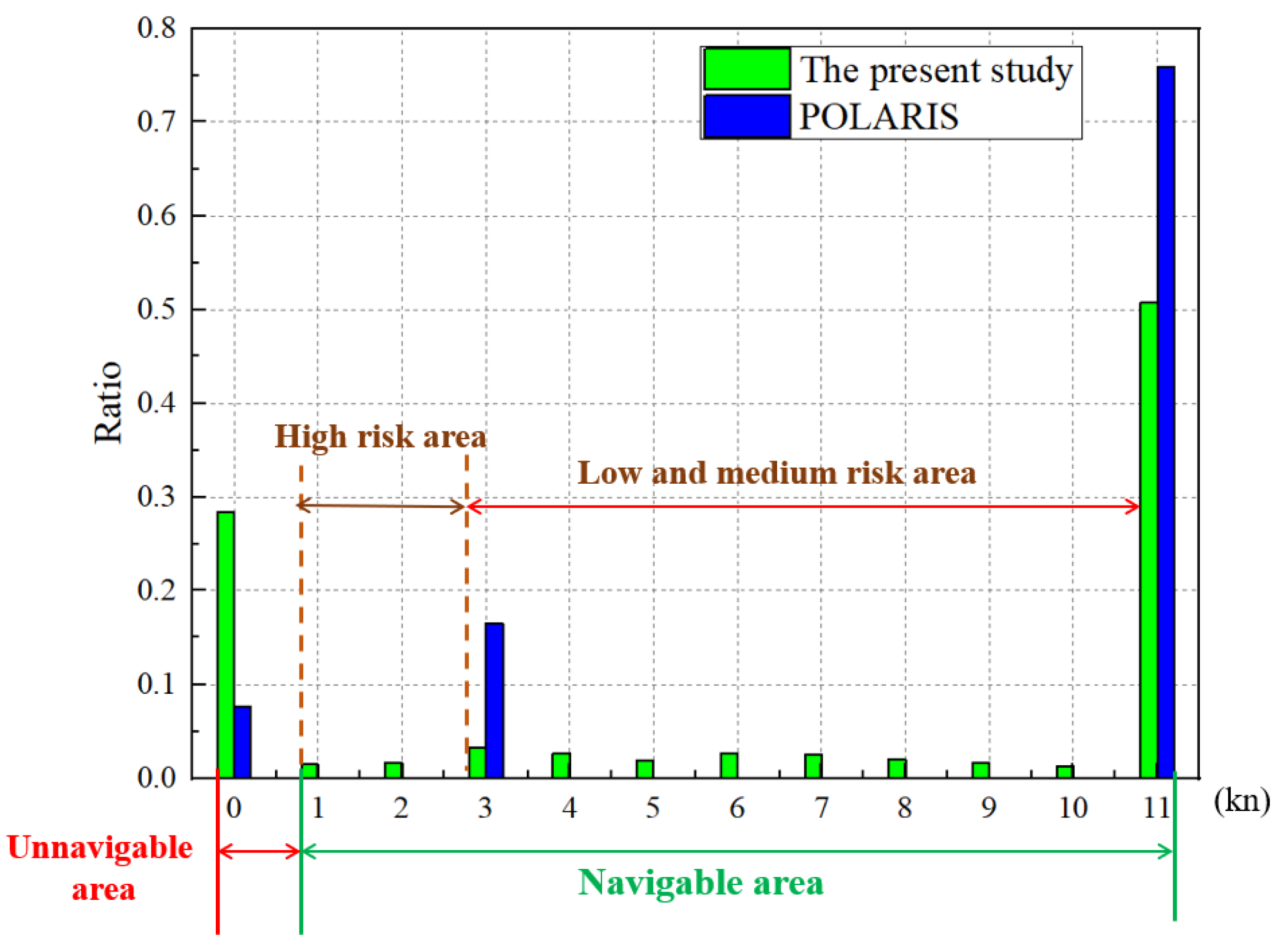
- For low-risk ice areas, the recommended upper speed limit is set as the economical service speed of 11 kn.
- ii.
- For medium-risk areas, the speed limit by POLARIS for ice class below PC5 is used as a lower bound for ship’s advance in ice, i.e., 3.0 kn.
- iii.
- For high-risk areas, a minimum speed of 0.5 kn is required to keep the ship moving in ice.
- iv.
- For unnavigable areas, the navigation speed is less than 0.5 kn even under full engine output.
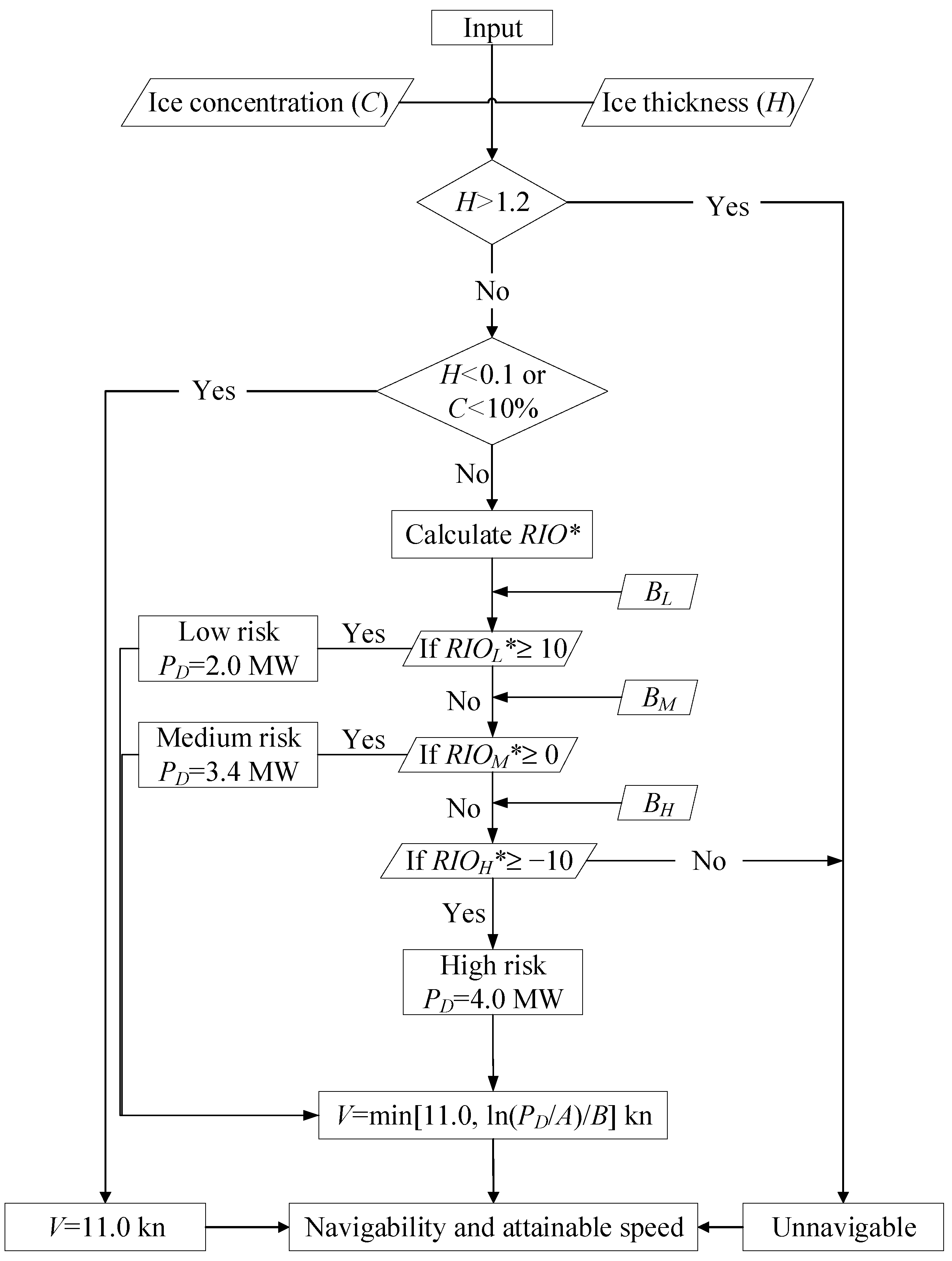
3.3. Speed Design for Various Ice Conditions
4. Route Planning: Simulation and Case Study
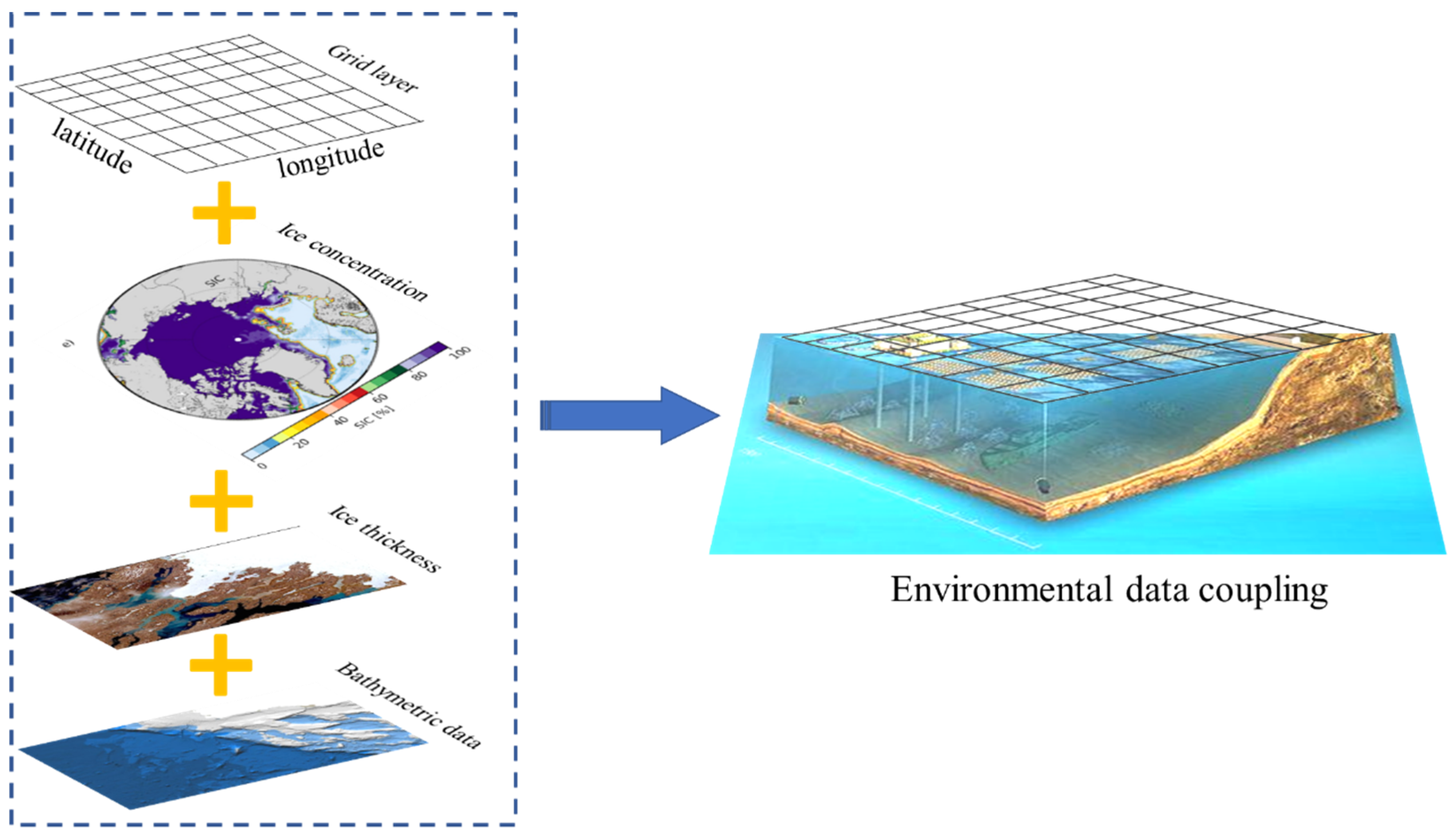
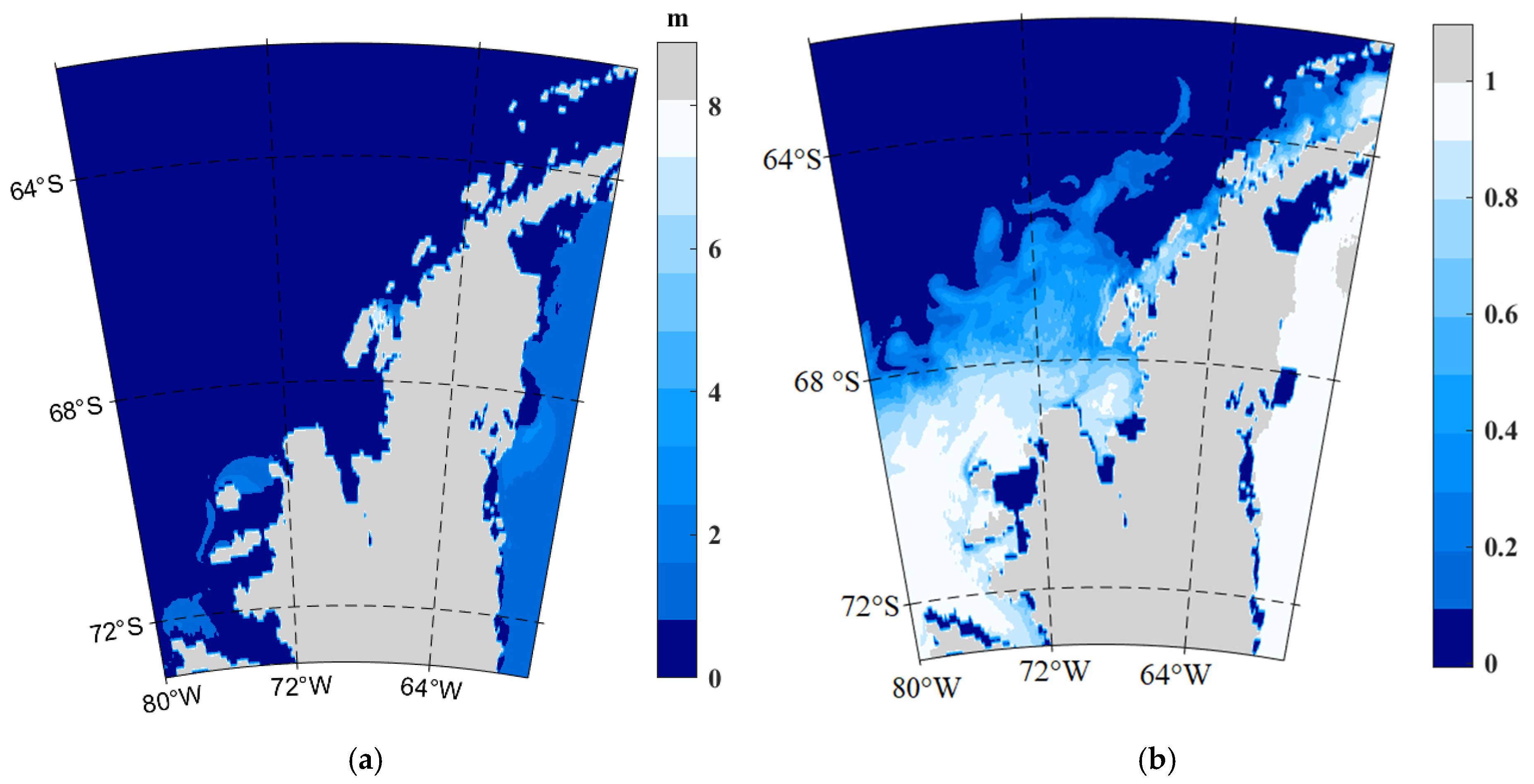
4.1. Environment Data and Design variables
4.2. Objective Function and Constrains
- i.
- The water depth should be at least 13.875 m to ensure safety and comfort;
- ii.
- The ice thickness should not exceed 1.2 m for the present PC6 classed ship;
- iii.
- The calculated new risk index RIO* should not be lower than −10 to prevent potential besetting incidents.
4.3. Case Study
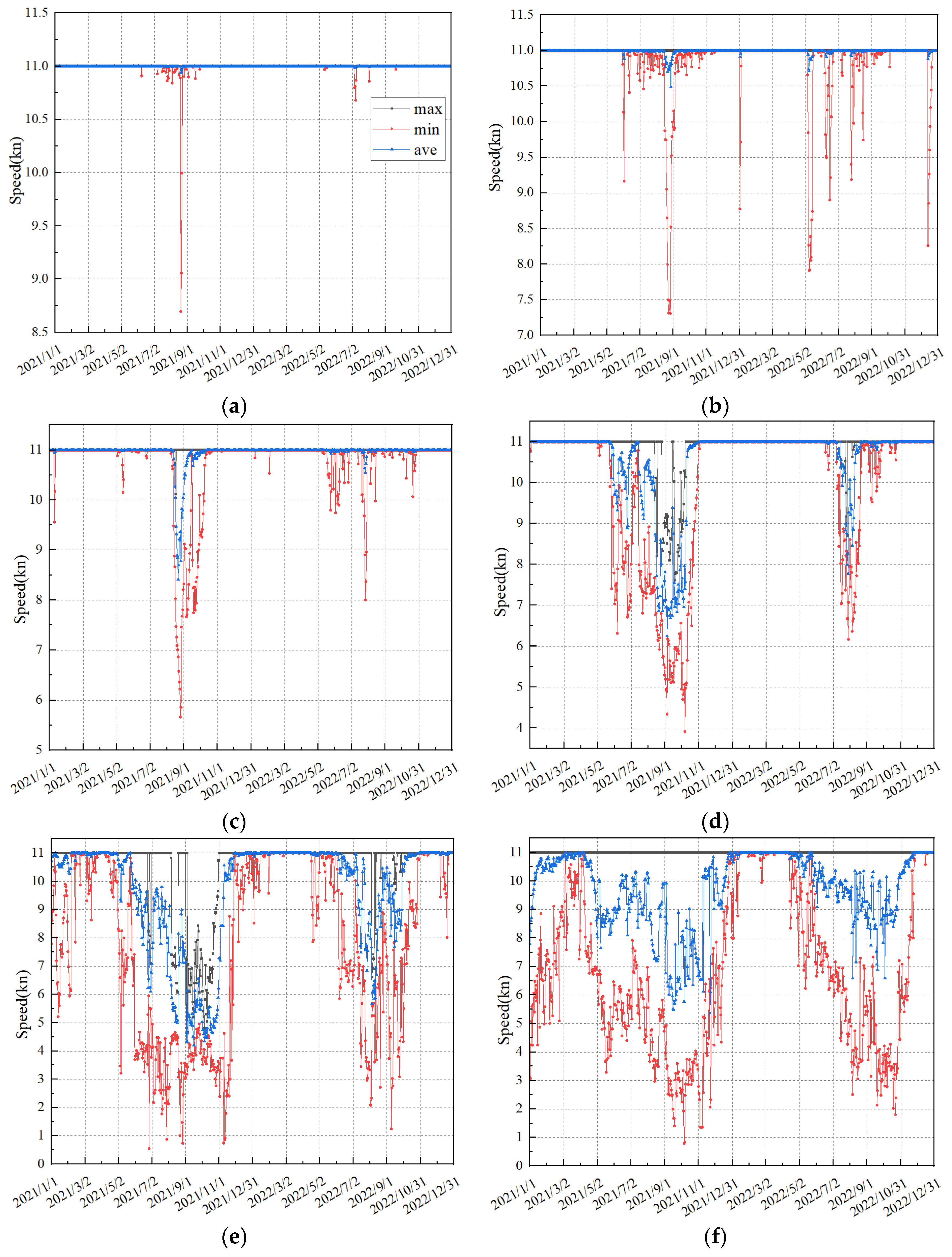
4.3.1. Speed Information Compared with POLARIS
4.3.2. Result Analysis and Potential Routes
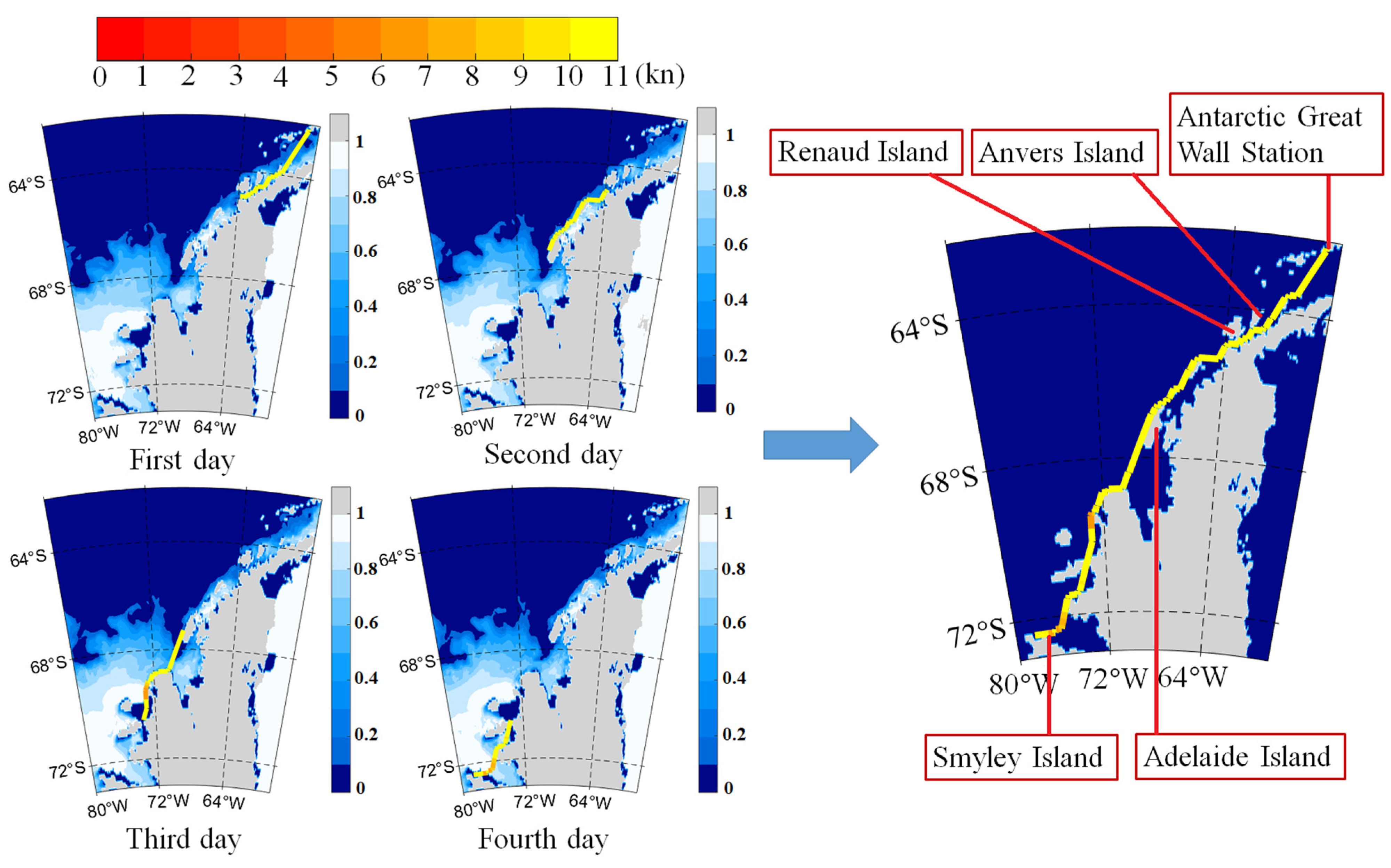
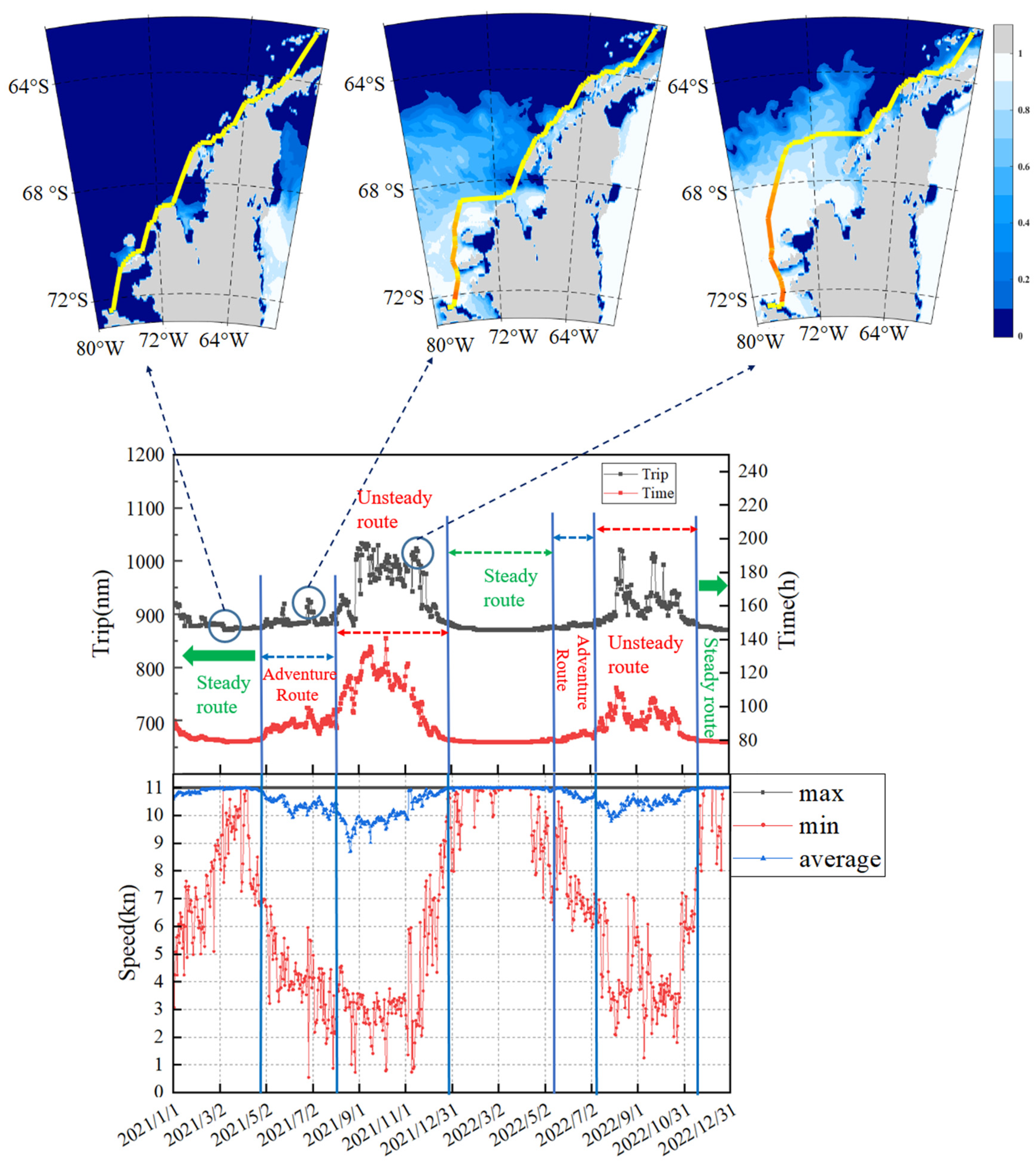
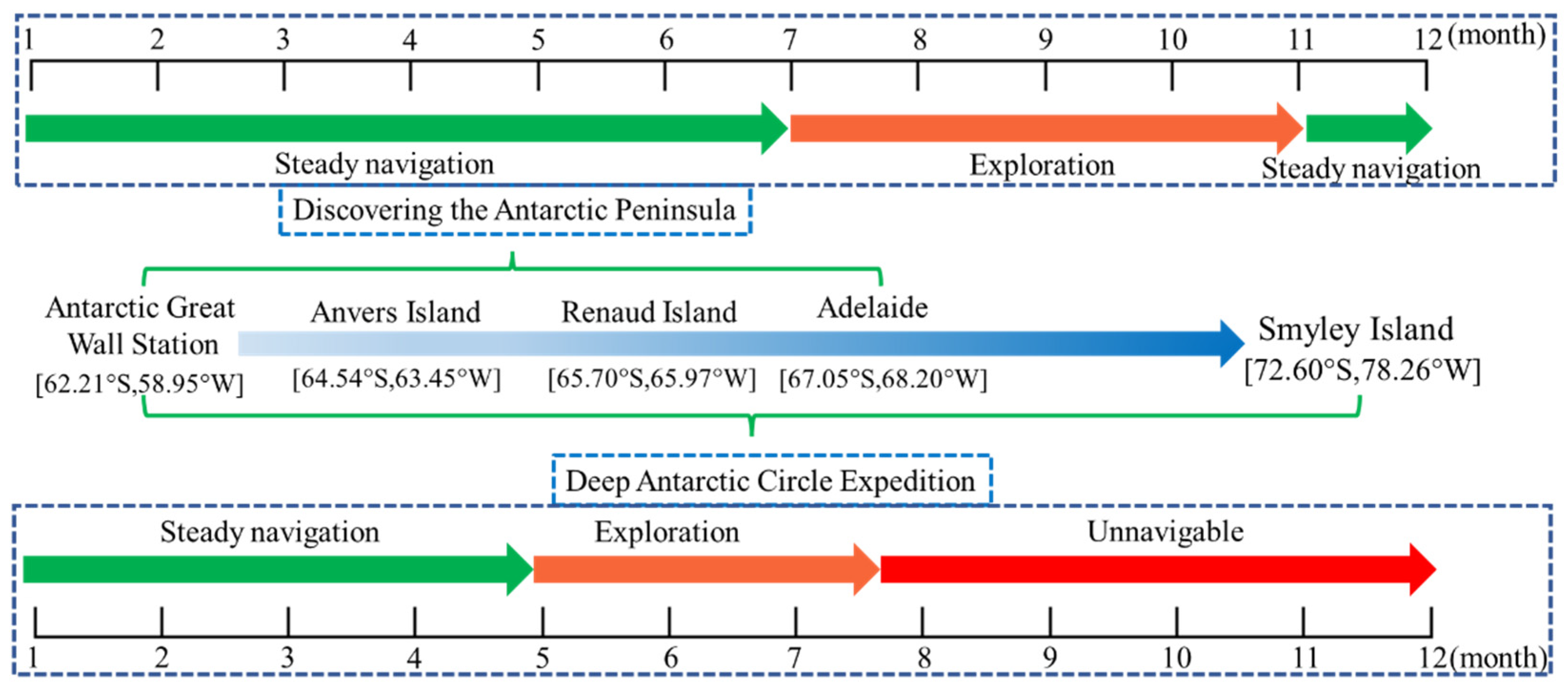
- Three navigational windows characterized by a steady state of the trip or time are identified, including 1 January to 28 April 2021, 29 December 2021 to 4 May 2022 (summer), and 22 November to 31 December 2022. These periods can provide relatively steady navigational speeds and predictable transit time for the present polar cruise ship. Additionally, these periods may offer opportunities for shore excursions and exploration of the shore ice and iceberg landscapes, as the planned route is close to the land (see Figure 15). Note that the steady period in 2022 is slightly longer than that in 2021, possibly due to the changes in sea ice conditions resulting from global warming.
- Navigational windows of minor fluctuations occur between 29 April and 2 August 2021, and between 5 May and 4 July 2022 (autumn), requiring an average speed of approximately 10.5 kn. In the south of 67° S, the speed significantly decreases, dropping to as low as 0.5 kn in some areas. As the Antarctic temperature decreases, sea ice near the land in the south of 67° S becomes thicker and denser, leading to an increase in total voyage distance and time and deviating the route from the coast. In 2021, the speed for some areas was lower than 4 kn, while in 2022, the speed was generally over 5 kn, with most regions located in the low-risk zone. These unique features make this period ideal for explorers. Nevertheless, cruise companies must consider carefully while developing routes during this window period.
- Periods from 3 August to 28 December 2021, and from 5 July to 21 November 2022 (winter and spring) are considered unsuitable for commercial navigations due to the continuous drop in temperature of coastal sea ice. Although the route in the north of 67°S has minor fluctuations, allowing access to several stations, the route in southern areas is characterized by a long distance from the coastline into the highly concentrated ice and lower attainable speeds, leading to high power requirements and fuel consumptions for the ship.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature and Abbreviations
| Symbol | Meaning |
| A, B | Coefficients in the exponential function of P–V relation, also as functions of ice thickness and concentration |
| C | Ice concentration |
| Ca | Cauchy number |
| E | Elastic modulus of ice |
| Fr | Froude number |
| g | Acceleration of gravity |
| H | Ice thickness |
| I | Navigability information |
| i | Grid number |
| L | Geometric length |
| Lg | Geographical distance between sites |
| lat | Latitude |
| lon | Longitude |
| n | Propeller rate |
| PD | Required propulsion power |
| Q | Shaft torque |
| t | Total transit time |
| T | Shaft thrust |
| V | Ship velocity |
| ρ | Density |
| λ | Geometric scale factor |
| ITTC | International Towing Tank Conference |
| P | Power |
| POLARIS | Polar Operational Limit Assessment Risk Indexing System |
| RIO | Risk Index Outcome by POLARIS |
| RIO* | The new Risk Index Outcome by the present study |
| RIV | Risk Index Value |
| SMCR | Specified Maximum Continuous Rating |
| UIWL | Upper ice waterline |
| UKC | Under-keel clearance |
References
- Wang, S.; Mu, Y.; Zhang, X.; Xie, J. Polar tourism and environment change: Opportunity, impact and adaptation. Polar Sci. 2020, 25, 100544. [Google Scholar]
- IAATO. Antarctic Tourism Statistics, 1992–2019. Available online: http://www.iaato.org/ (accessed on 25 May 2023).
- Shepherd, A.; Fricker, H.; Farrell, S. Trends and connections across the Antarctic cryosphere. Nature 2018, 558, 223–232. [Google Scholar] [CrossRef]
- AECO. The Association of Arctic Expedition Cruise Operators. 2022. Available online: https://www.aeco.no (accessed on 25 May 2023).
- Lavissière, A.; Sohier, R.; Lavissière, M.C. Transportation systems in the Arctic: A systematic literature review using textometry. Transp. Res. Part A 2020, 141, 130–146. [Google Scholar] [CrossRef]
- Krivoguz, D.; Nosova, E.; Piatinskii, M. Analysis of spatio-temporal changes in Arctic Ocean ecosystem using machine learning and its impact on marine transportation system. Transp. Res. Procedia 2022, 63, 2967–2971. [Google Scholar] [CrossRef]
- Montewka, J.; Goerlandt, F.; Lensu, M.; Kuuliala, L.; Guinness, R. Toward a hybrid model of ship performance in ice suitable for route planning purpose. J. Risk Reliab. 2019, 233, 18–34. [Google Scholar] [CrossRef]
- Khan, B.; Khan, F.; Veitch, B.; Yang, M. An operational risk analysis tool to analyze marine transportation in Arctic waters. Reliab. Eng. Syst. Saf. 2018, 169, 485–502. [Google Scholar] [CrossRef]
- Li, Z.; Ringsberg, J.; Rita, F. A voyage planning tool for ships sailing between Europe and Asia via the Arctic. Ships Offshore Struc. 2020, 15, 10–19. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, K.; Zhang, R.; Qian, L.; Shan, Y. Feasibility of the Northeast Passage: The role of vessel speed, route planning, and icebreaking assistance determined by sea-ice conditions for the container shipping market during 2020–2030. Transp. Res. Part E 2021, 149, 102235. [Google Scholar] [CrossRef]
- Lee, H.; Roh, M.; Kim, K. Ship route planning in Arctic Ocean based on POLARIS. Ocean Eng. 2021, 234, 109297. [Google Scholar] [CrossRef]
- IMO. MSC.1-Circ.1519—Guidance on Methodologies for Assessing Operational Capabilities and Limitations in Ice; IMO: London, UK, 2016. [Google Scholar]
- Browne, T.; Tran, T.; Veitch, B.; Smith, D.; Khan, F. A method for evaluating operational implications of regulatory constraints on Arctic shipping. Mar. Policy 2022, 135, 104839. [Google Scholar] [CrossRef]
- Lee, S. A Study on the Method of Simultaneous Determination of Path and Speed for Ship Route Planning. Ph.D. Thesis, Seoul National University, Seoul, Republic of Korea, 2017. [Google Scholar]
- Kotovirta, V.; Jalonen, R.; Axell, L.; Riska, K.; Berglund, R. A system for route optimization in ice-covered waters. Cold Reg. Sci. Technol. 2009, 55, 52–62. [Google Scholar] [CrossRef]
- Choi, M.; Chuang, H.; Yamaguchi, H.; Nagakawa, K. Arctic sea route path planning based on an uncertain ice prediction model. Cold Reg. Sci. Technol. 2015, 109, 61–69. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, D.; Zhang, M.; Mao, W. Data-driven ship energy efficiency analysis and optimization model for route planning in ice-covered Arctic waters. Ocean Eng. 2019, 186, 106071. [Google Scholar] [CrossRef]
- FSICR. Ice Class Regulations and the Application Thereof (Finnish-Swedish Ice Class Rules); Finnish Transport Safety Agency (TRAFI): Helsinki, Finland, 2017. [Google Scholar]
- ISO 19906; Petroleum and Natural Gas Industries—Arctic Offshore Structures. International Organization for Standardization: Geneva, Switzerland, 2019.
- ITTC. Propulsions Test in Ice. In ITTC Recommended Procedures and Guidelines; ITTC: Zurich, Switzerland, 2021. [Google Scholar]
- Huang, Y. Model test study of the nonsimultaneous failure of ice before wide conical structures. Cold Reg. Sci. Technol. 2010, 63, 87–96. [Google Scholar] [CrossRef]
- Sun, J.; Huang, Y. Investigations on the ship-ice impact: Part 1. Experimental methodologies. Mar Struct. 2020, 72, 102772. [Google Scholar] [CrossRef]
- Timco, G.; Weeks, W. A review of the engineering properties of sea ice. Cold Reg. Sci. Technol. 2010, 60, 107–129. [Google Scholar] [CrossRef]
- Li, Z.; Marcel, N.; Takenobu, T.; Christian, H. Analysis on the crystals of sea ice cores derived from Weddell Sea, Antarctica. Chin. J. Polar Res. 2009, 21, 177–185. [Google Scholar]
- Timco, G. Ice forces on structures: Physical modeling techniques. In Proceedings of the IAHR Symposium on Ice, Hamburg, Germany, 27–31 August 1984; Volume 4, pp. 117–150. [Google Scholar]
- ITTC. General Guidance and Introduction to Ice Model Testing. In ITTC Recommended Procedures and Guidelines; ITTC: Zurich, Switzerland, 2021. [Google Scholar]
- ITTC. Guidelines for Modelling of Complex Ice Environments. In ITTC Recommended Procedures and Guidelines; ITTC: Zurich, Switzerland, 2021. [Google Scholar]
- ITTC. Resistance Test in Ice. In ITTC Recommended Procedures and Guidelines; ITTC: Zurich, Switzerland, 2021. [Google Scholar]
- MAN Diesel & Turbo. SFOC Optimisation Methods for MAN B&W Two-Stroke IMO Tire II Engines; MAN Diesel & Turbo: Copenhagen, Denmark, 2010. [Google Scholar]
- Topaj, A.; Tarovik, O.; Bakharev, A.; Kondratenko, A. Optimal ice routing of a ship with icebreaker assistance. Appl. Ocean Res. 2019, 86, 177–187. [Google Scholar] [CrossRef]
- Zvyagina, T.; Zvyagin, P. A model of multi-objective route optimization for a vessel in drifting ice. Reliab. Eng. Syst. Safe 2022, 218, 108147. [Google Scholar] [CrossRef]
- Lehtola, V.; Montewka, J.; Goerlandt, F.; Guinness, R.; Lensu, M. Finding safe and efficient shipping routes in ice-covered waters: A framework and a model. Cold Reg. Sci. Technol. 2019, 165, 102795. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, R.; Qian, L. An improved A* algorithm based on hesitant fuzzy set theory for multi-criteria Arctic route planning. Symmetry 2018, 10, 765. [Google Scholar] [CrossRef]
- Li, Z.; Yao, C.; Zhu, X.; Gao, G.; Hu, S. A decision support model for ship navigation in Arctic waters based on dynamic risk assessment. Ocean Eng. 2022, 244, 110427. [Google Scholar] [CrossRef]
- General Bathymetric Chart of the Oceans (GEBCO). GEBCO Gridded Bathymetry Data Download. Available online: https://download.gebco.net/ (accessed on 6 May 2023).
- Copernicus Marine Environment Monitoring Service. Global Ocean Physics Analysis and Forecast. Available online: https://data.marine.copernicus.eu/product/GLOBAL_ANALYSISFORECAST_PHY_001_024/download?dataset=cmems_mod_glo_phy_anfc_0.083deg_P1D-m (accessed on 6 May 2023).
- Briggs, M. Ship Squat Predictions for Ship/Tow Simulator; ERDC/CHL CHETN-I-72; US Army Corps of Engineers: Washington, DC, USA, 2006. [Google Scholar]
- Jachowski, J. Assessment of ship squat in shallow water using CFD. Arch. Civ. Mech. Eng. 2008, 8, 27–36. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Full Scale | Model Scale |
|---|---|---|
| Length overall | 104.4 m | 5.22 m |
| Breadth | 18.4 m | 0.92 m |
| Drought for upper ice waterline (UIWL) | 5.55 m | 0.2775 m |
| Displacement at UIWL | 6646 ton | 0.831 ton |
| Rated power | 4.0 MW | / |
| Test Parameters | Measuring Device | Range | Accuracy |
|---|---|---|---|
| Towing force | One-directional load cell | 0–3000 N | ±1.5 N |
| Shaft thrust | Dynamometer | 0–2000 N | ±1.0 N |
| Shaft torque | Dynamometer | 0–10 Nm | ±0.01 Nm |
| Propeller rate | Servo motor | 0–3000 r/min | 0.1 r/min |
| Ship velocity | Main carriage | 0–1.0 m/s | 1 mm/s |
| Scale | Ice Thickness | Ice Concentration | Ship Velocity |
|---|---|---|---|
| Full-scale | 1.0 m, 0.5 m | 90%, 70%, 50% | 3 kn, 5 kn, 8 kn |
| Model-scale | 5.0 cm, 2.5 cm | 90%, 70%, 50% | 0.345 m/s, 0.575 m/s, 0.920 m/s |
| Ice Concentration | Ship Velocity V (kn) | Required Propulsion Power PD (MW) | |
|---|---|---|---|
| Ice Thickness H = 0.5 m | Ice Thickness H = 1.0 m | ||
| 90% | 3 | 2.052 | 4.995 |
| 5 | 2.673 | 5.679 | |
| 8 | 3.929 | 7.295 | |
| 70% | 3 | 1.280 | 2.909 |
| 5 | 1.704 | 3.471 | |
| 8 | 2.805 | 4.909 | |
| 50% | 3 | 0.513 | 0.627 |
| 5 | 0.722 | 0.919 | |
| 8 | 1.496 | 1.717 | |
| Risk Level | Engine Load Range | PD in MW | RIO* |
|---|---|---|---|
| Low risk | ≤50% SMCR | PD ≤ 2.0 | RIO* ≥ 10 |
| Medium risk | 50–85% SMCR | 2.0 < PD ≤ 3.4 | 0 ≤ RIO* < 10 |
| High risk | 85–100% SMCR | 3.4 < PD ≤ 4.0 | −10 ≤ RIO* < 0 |
| Unnavigable | >100% SMCR | PD > 4.0 | RIO* < −10 |
| Parameter | Data Source | Resolution | Format |
|---|---|---|---|
| Ice thickness Ice concentration | doi.org/10.48670/moi-00016 | 0.083° × 0.083° (1/12) | .NetCDF |
| Water depth | https://download.gebco.net/ | 0.0042° × 0.0042° (1/240) |
| No. | Station | Location | Main Scenery | Range |
|---|---|---|---|---|
| 1 | Antarctic Great Wall Station | [62.21° S, 58.95° W] | Chinese first scientific research station in the Antarctic | 80°−58° W 73°−62° S |
| 2 | Anvers Island | [64.54° S, 63.45° W] | Whales | |
| 3 | Renaud Island | [65.70° S, 65.97° W] | Adélies penguin | |
| 4 | Adelaide Island | [67.05° S, 68.20° W] | Glaciers | |
| 5 | Smyley Island | [72.60° S, 78.26° W] | Emperor penguin |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Sun, C.; Sun, J.; Song, Z. Route Planning of a Polar Cruise Ship Based on the Experimental Prediction of Propulsion Performance in Ice. J. Mar. Sci. Eng. 2023, 11, 1655. https://doi.org/10.3390/jmse11091655
Huang Y, Sun C, Sun J, Song Z. Route Planning of a Polar Cruise Ship Based on the Experimental Prediction of Propulsion Performance in Ice. Journal of Marine Science and Engineering. 2023; 11(9):1655. https://doi.org/10.3390/jmse11091655
Chicago/Turabian StyleHuang, Yan, Ce Sun, Jianqiao Sun, and Zhipeng Song. 2023. "Route Planning of a Polar Cruise Ship Based on the Experimental Prediction of Propulsion Performance in Ice" Journal of Marine Science and Engineering 11, no. 9: 1655. https://doi.org/10.3390/jmse11091655
APA StyleHuang, Y., Sun, C., Sun, J., & Song, Z. (2023). Route Planning of a Polar Cruise Ship Based on the Experimental Prediction of Propulsion Performance in Ice. Journal of Marine Science and Engineering, 11(9), 1655. https://doi.org/10.3390/jmse11091655