
The Hydrodynamic Interaction between an AUV and Submarine during the Recovery Process

Abstract
:1. Introduction
2. Geometric Models and Numerical Methodology
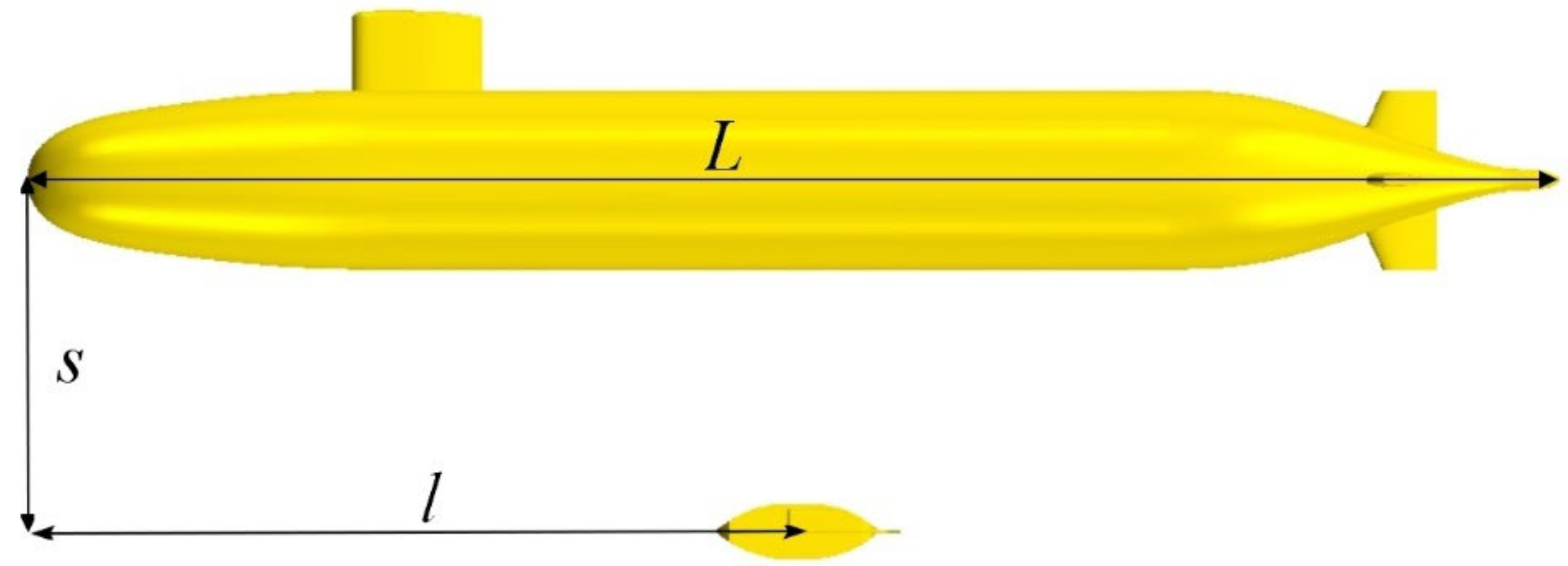
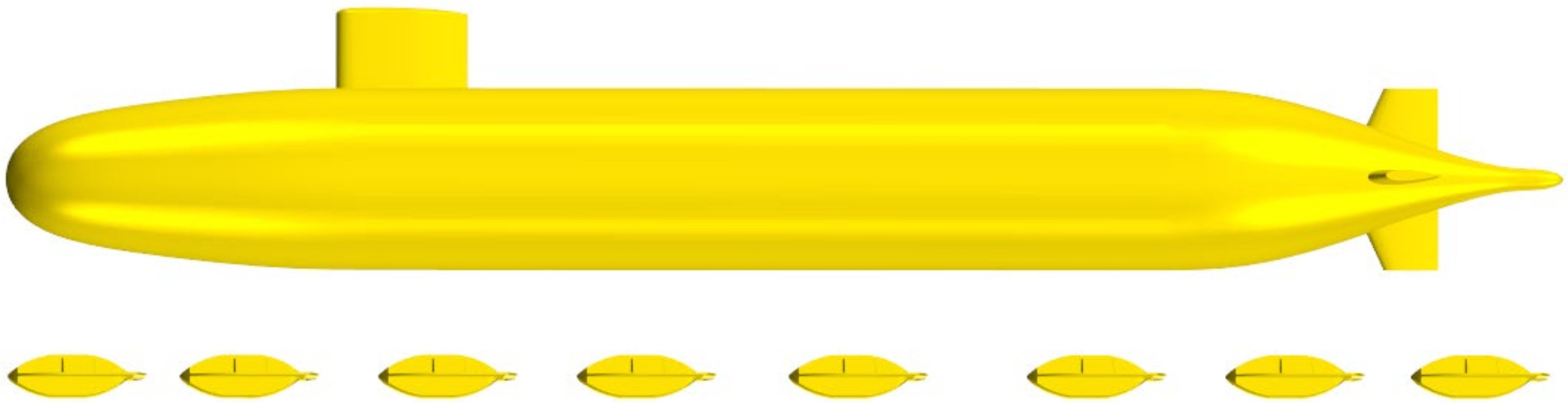
2.1. Geometric Models
2.2. Numerical Methodology
2.2.1. Governing Equations and Numerical Setting
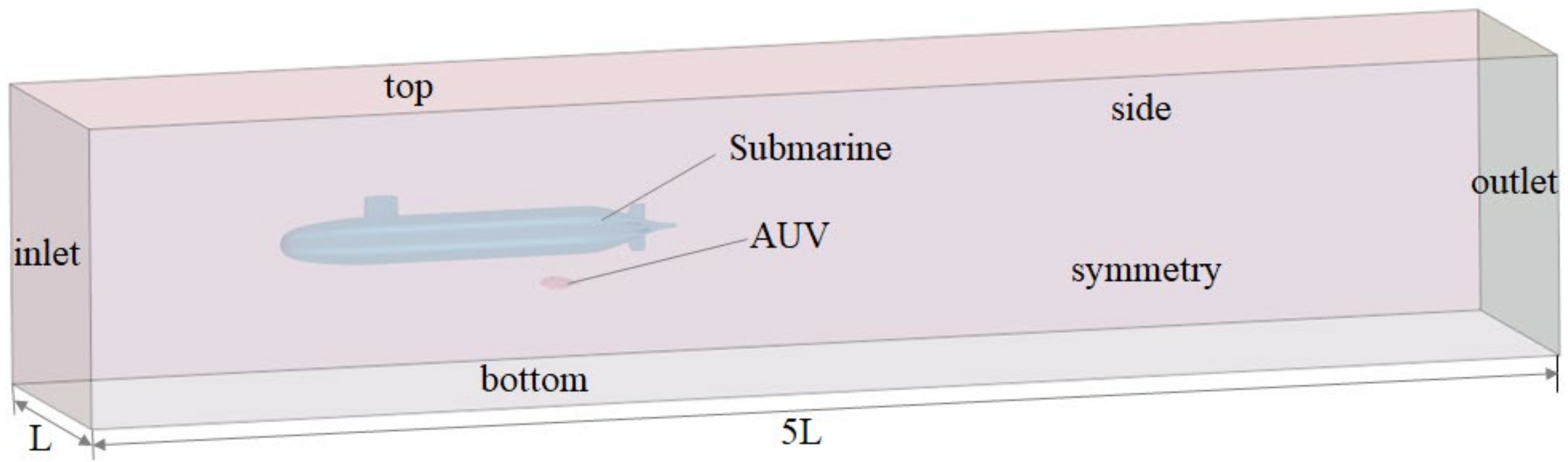
2.2.2. Fluid Domain and Boundary Conditions
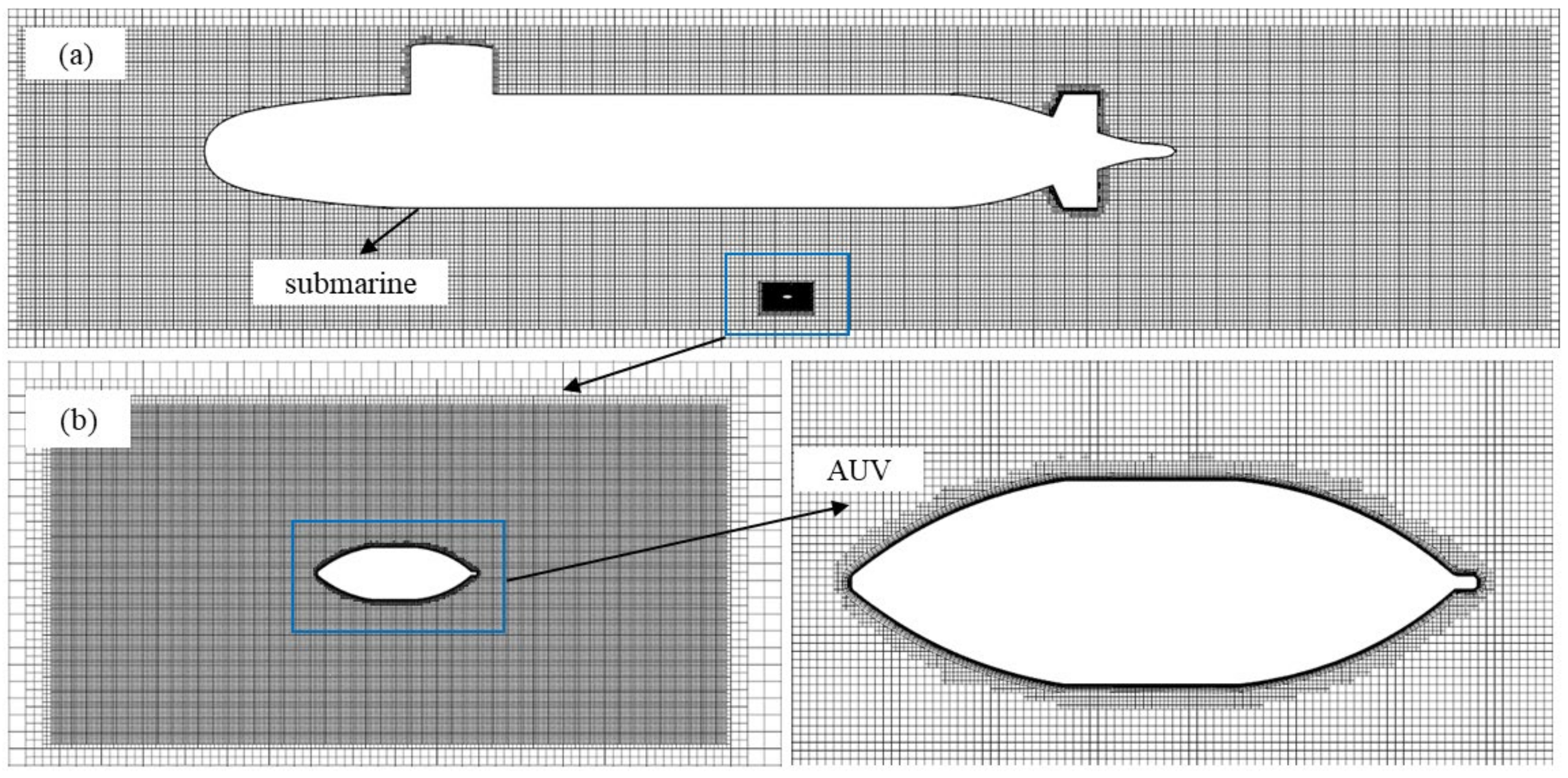
2.2.3. Meshing
3. Reliability of Numerical Models
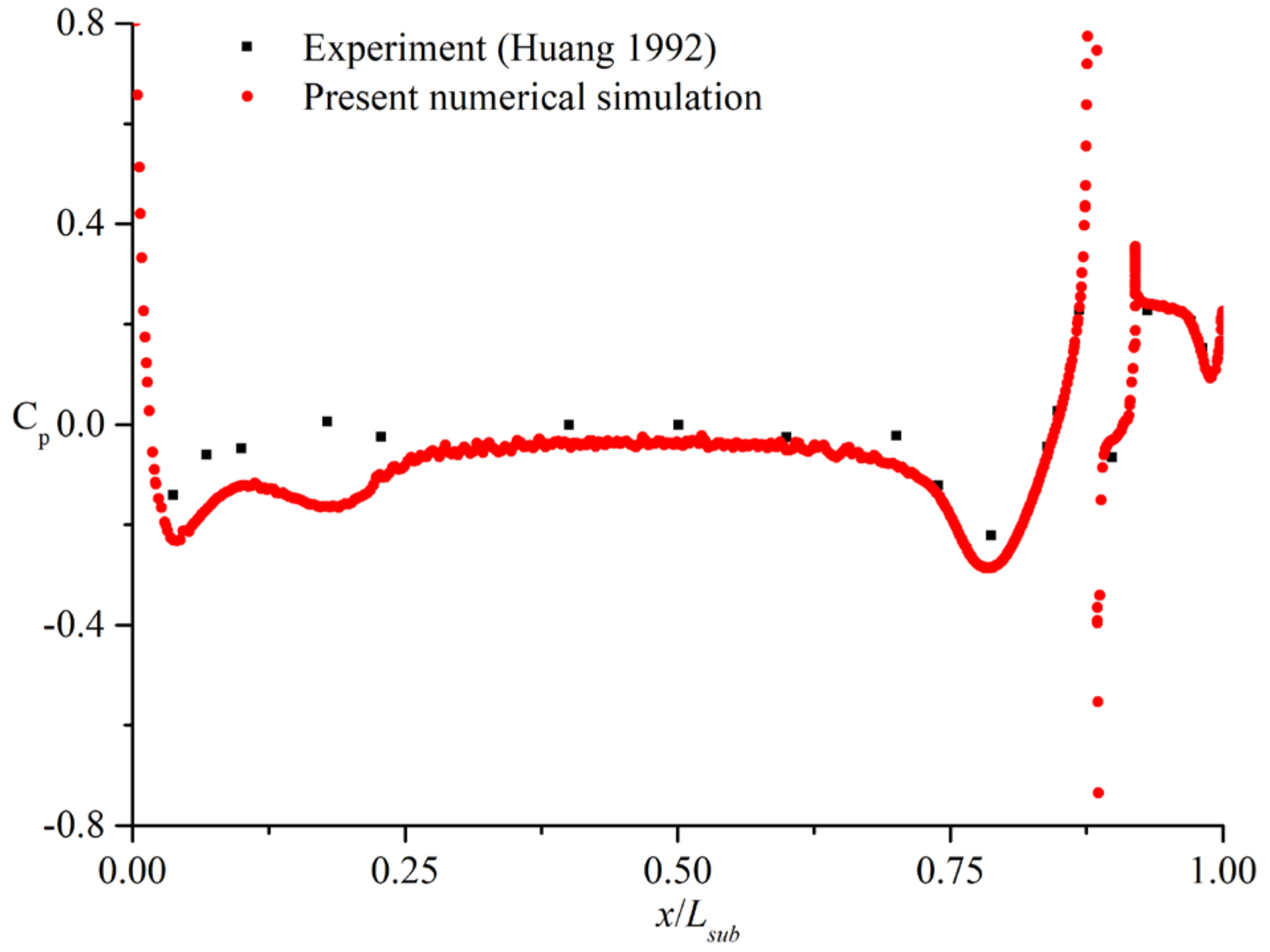
3.1. The Pressure Distribution on the Longitudinal Section and Resistance of the SUBOFF
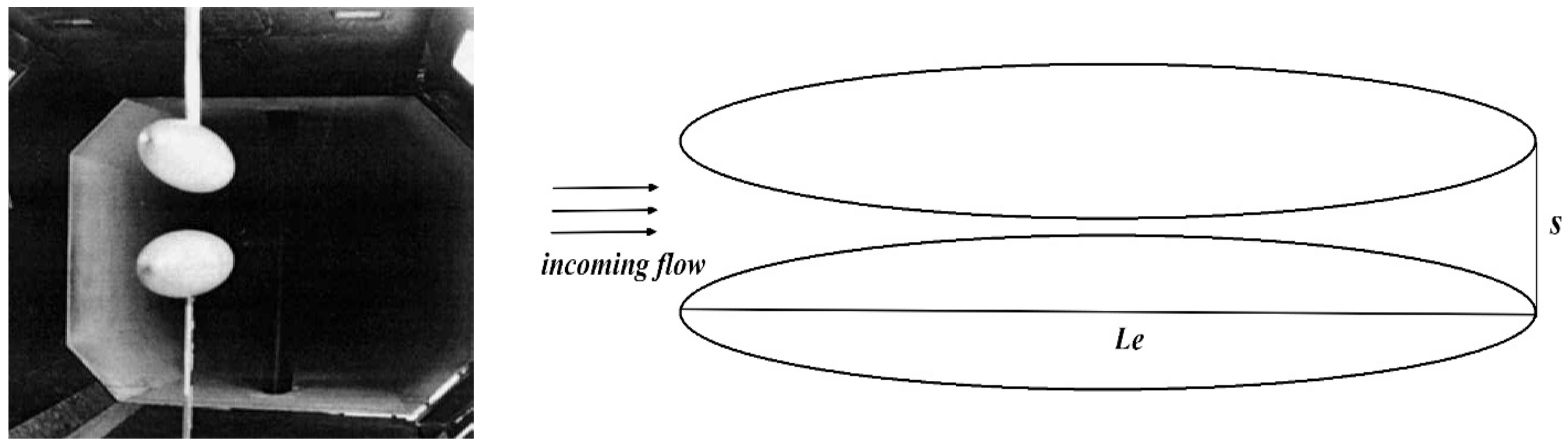
3.2. A Pair of Similar Ellipsoids in Proximity at Separation-Length Ratios
4. Results Analysis
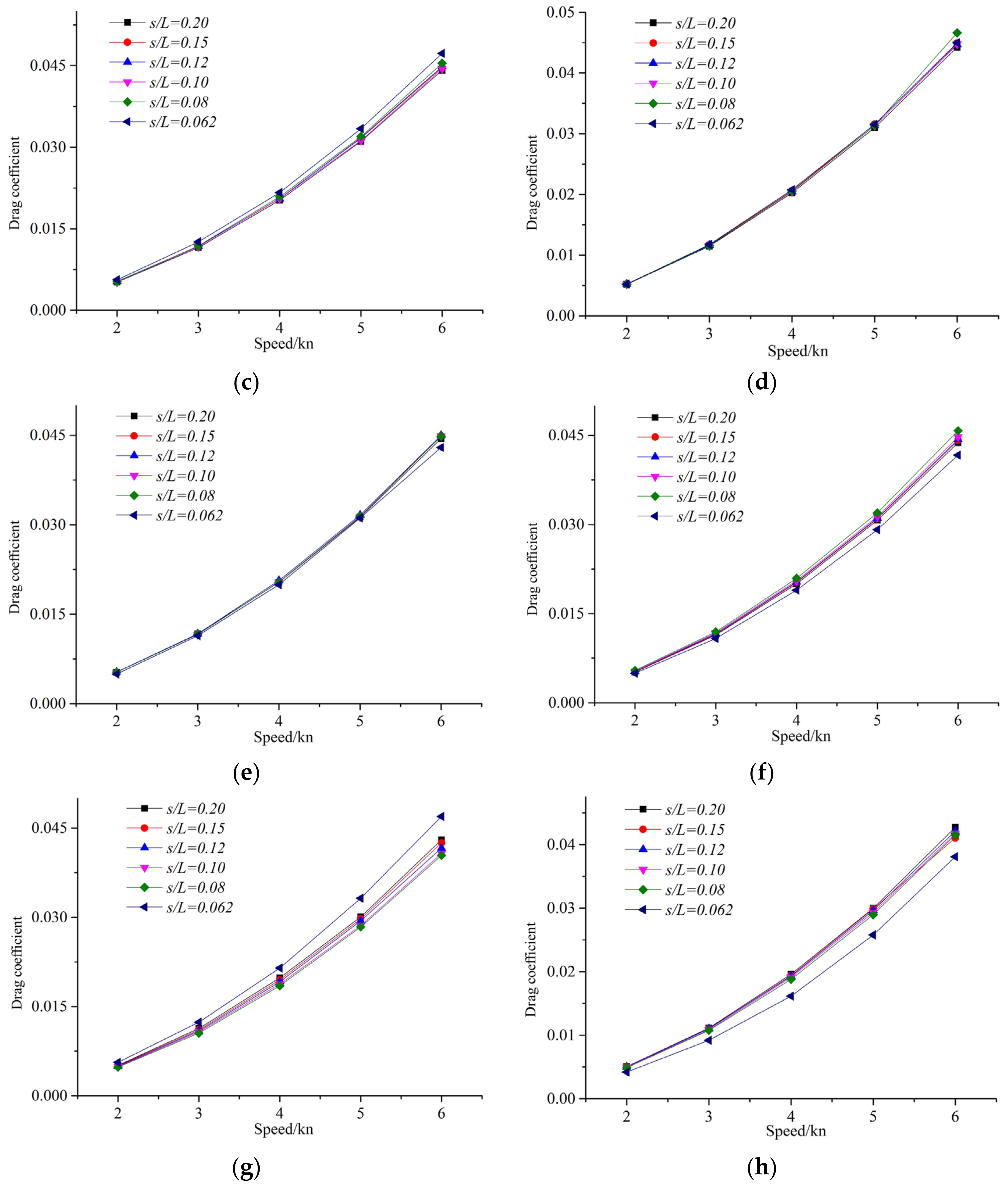
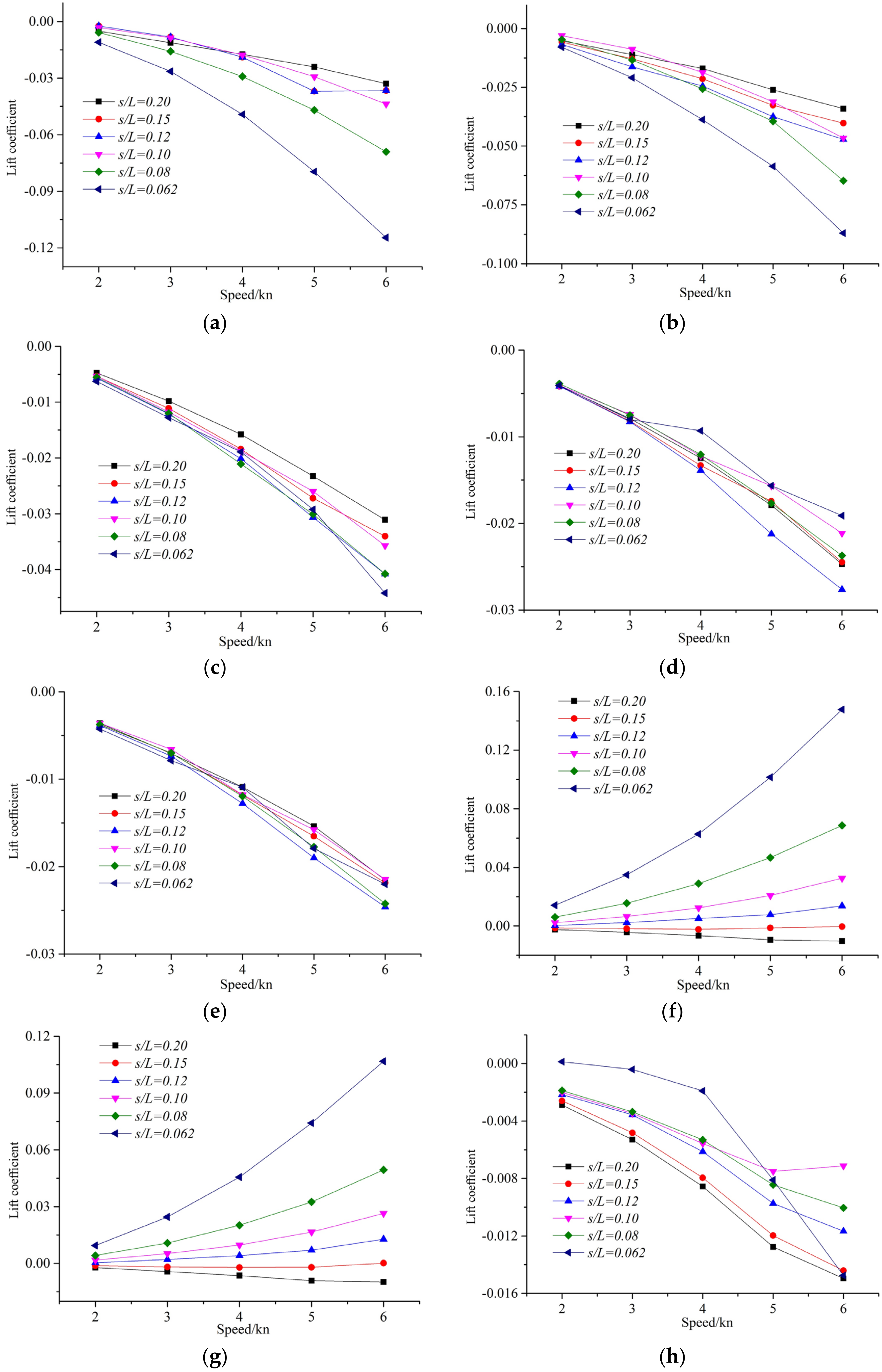
4.1. Results for Drag and Lift
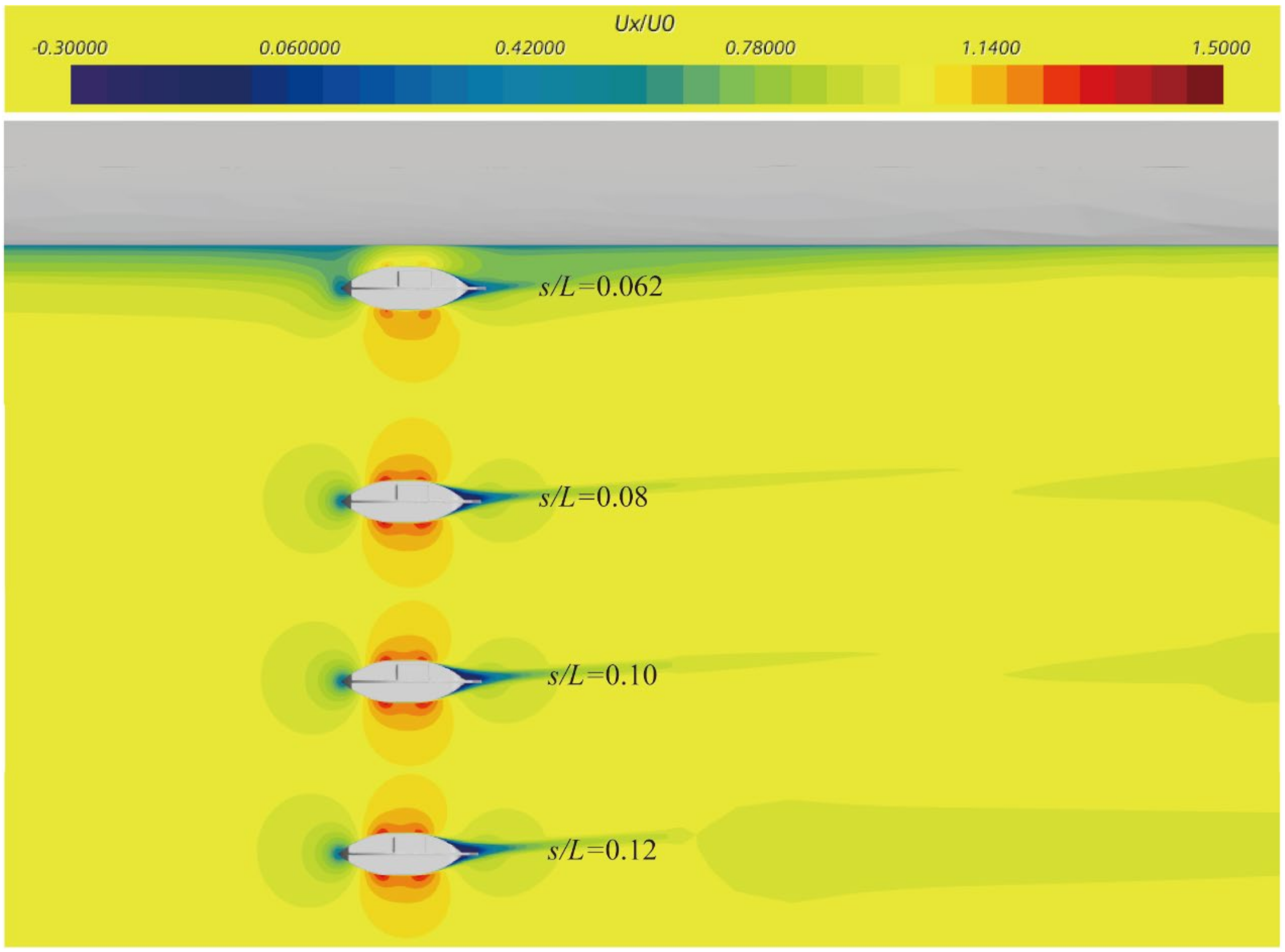
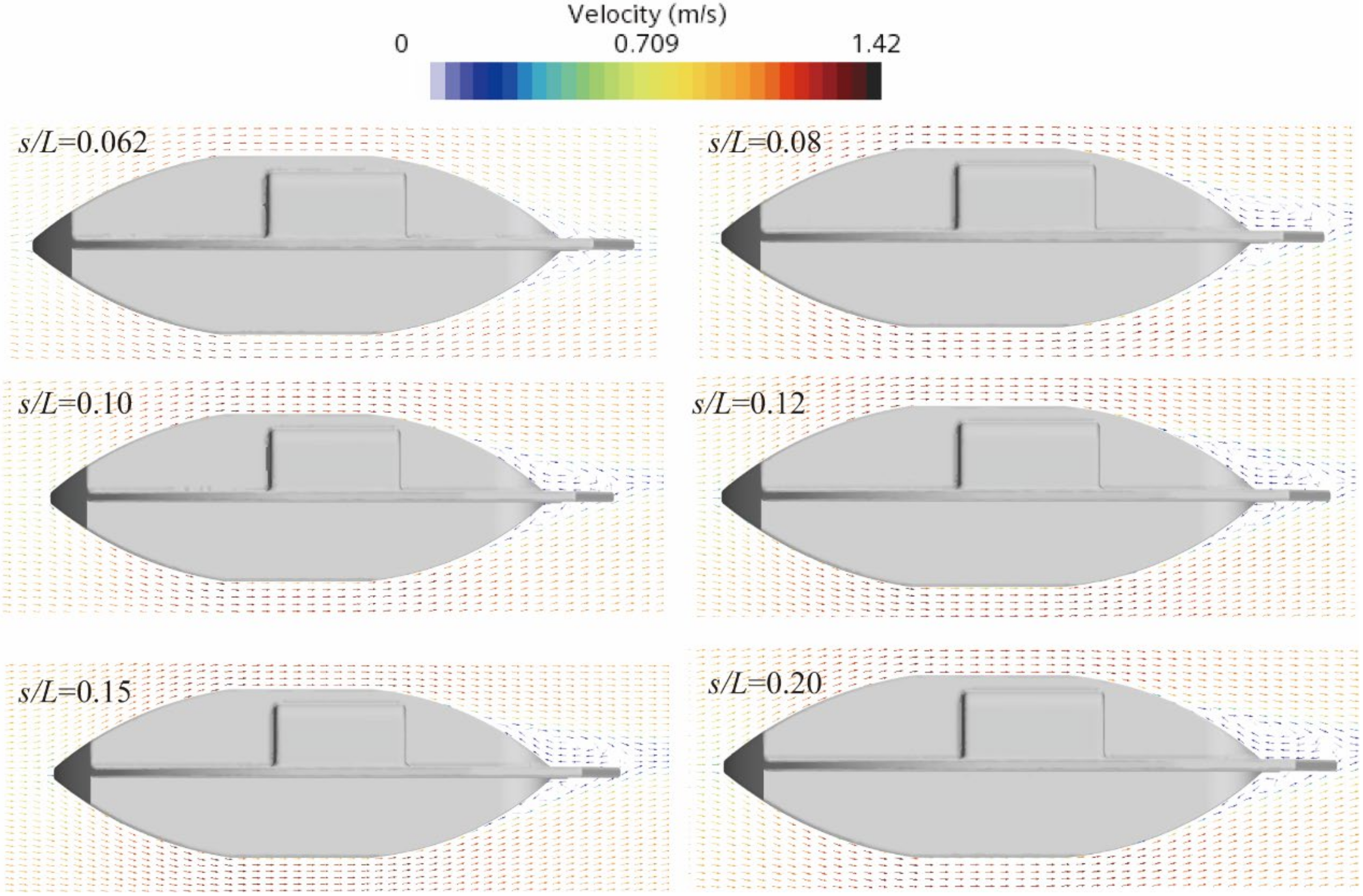
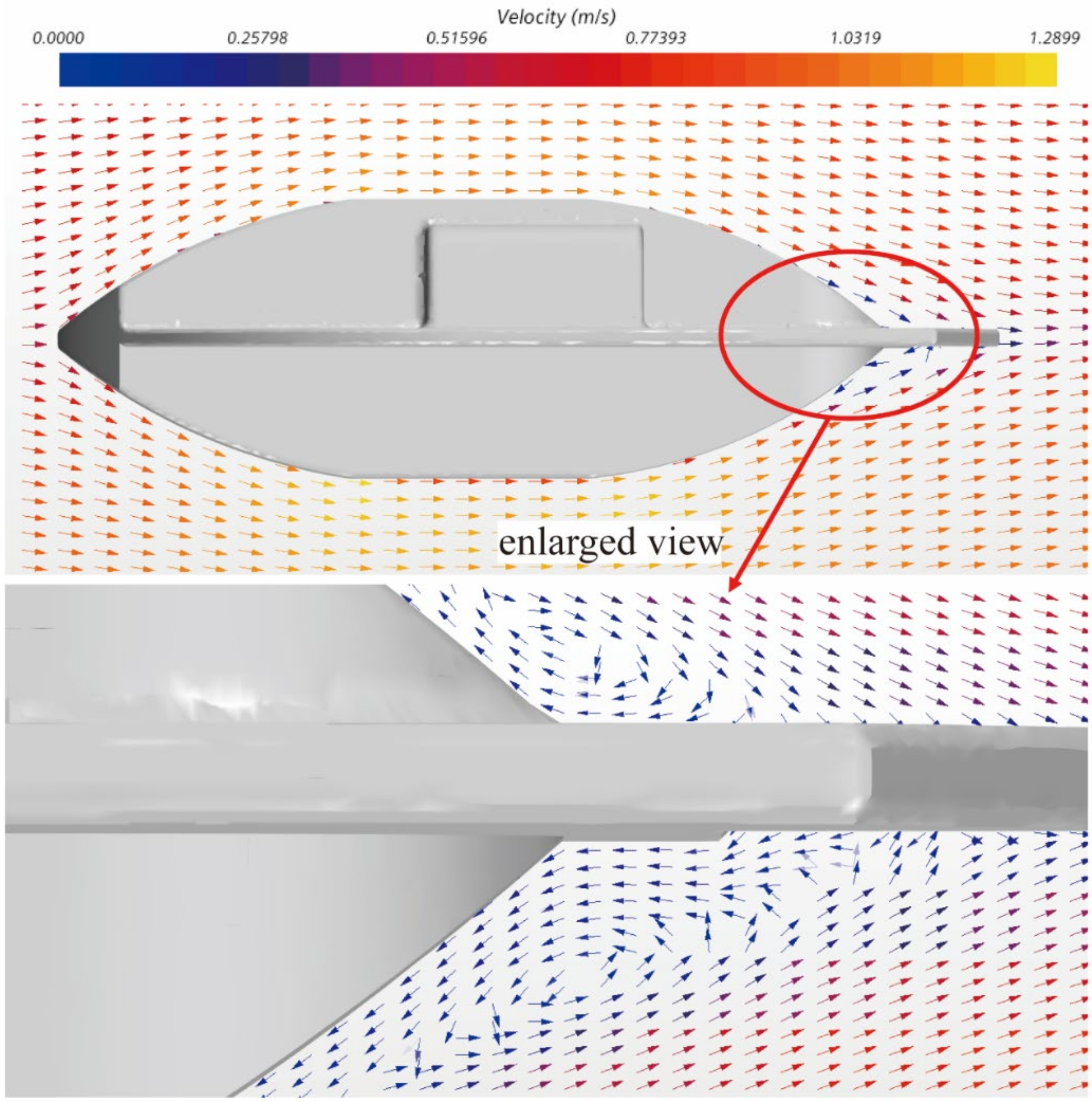
4.2. Velocity Field
4.2.1. l/L = 0, s/L = 0.08
4.2.2. s/L = 0.08, V = 2 kn
4.2.3. l/L = 0.6, V = 2 kn
4.3. Pressure s/L = 0.08, V = 2 kn
5. Conclusions
- (1)
- When the vertical distance between the AUV and submarine changes, the resistance has little change, but when the speed changes, the resistance changes significantly.
- (2)
- When approaching the bow and stern area of the submarine, the AUV is more susceptible to interference, while in the parallel middle section, it is less susceptible to interference because the shape of the bow and stern of the submarine changes greatly, and the flow field disturbance is obvious.
- (3)
- The lift increases as the vertical distance between the AUV and the submarine decreases, and the closer it approaches the submarine, the more significant the change in lift. And, when the AUV is in different longitudinal positions on the submarine, when the lift is negative, there is a repulsive effect between the submarine and the AUV. When the lift is positive, the submarine exhibits an upward suction effect on the AUV.
- (4)
- The velocity and pressure fields of the AUV are affected by the submarine when sailing at different positions. At the mid-longitudinal position of the submarine, the impact is minimal, and it is the best position for recovery.
- (5)
- This paper focuses on the interference effects of the AUV and submarine when they remain relatively stationary. Further research is needed to investigate the interference effects of oblique motion recovery and non-relative static recovery.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nicholson, J.W.; Healey, A.J. The present state of autonomous underwater vehicle (AUV) applications and technologies. Mar. Technol. Soc. J. 2008, 42, 44–51. [Google Scholar] [CrossRef]
- Wang, H.J.; Long, X.; Li, J.; Zhou, H.N. Design, construction of a small unmanned underwater vehicle. In Proceedings of the 2013 MTS/IEEE OCEANS-Bergen, Bergen, Norway, 10–14 June 2013; pp. 1–6. [Google Scholar]
- Nouri, N.M.; Zeinali, M.; Jahangardy, Y. AUV hull shape design based on desired pressure distribution. J. Mar. Sci. Technol. 2016, 21, 203–215. [Google Scholar] [CrossRef]
- Yan, K.; Wu, L. A survey on the key technologies for underwater AUV docking. Robot 2007, 29, 267–273. [Google Scholar]
- Zhang, W.; Wu, W.; Teng, Y.; Li, Z.; Yan, Z. An underwater docking system based on UUV and recovery mother ship: Design and experiment. Ocean Eng. 2023, 281, 114767. [Google Scholar] [CrossRef]
- Szczotka, M. AUV launch & recovery handling simulation on a rough sea. Ocean Eng. 2022, 246, 110509. [Google Scholar]
- Fan, S.; Liu, C.; Li, B.; Xu, Y.; Xu, W. UUV docking based on USBL navigation and vision guidance. J. Mar. Sci. Technol. 2019, 24, 673–685. [Google Scholar] [CrossRef]
- Page, B.R.; Mahmoudian, N. Simulation-driven optimization of underwater docking station design. IEEE J. Ocean. Eng. 2019, 45, 404–413. [Google Scholar] [CrossRef]
- Zhang, W.; Jia, G.; Wu, P.; Yang, S.; Huang, B.; Wu, D. Study on hydrodynamic characteristics of AUV launch process from a launch tube. Ocean Eng. 2021, 232, 109171. [Google Scholar] [CrossRef]
- Brizzolara, S.; Chryssostomidis, C. Design of an Unconventional ASV for Underwater Vehicles Recovery: Simulation of the motions for operations in rough seas. In Proceedings of the ASNE International Conference on Launch and Recovery, Linthicum, MD, USA, 14–15 November 2012. [Google Scholar]
- Sarda, E.I. Automated Launch and Recovery of an Autonomous Underwater Vehicle from an Unmanned Surface Vessel; Florida Atlantic University: Boca Raton, FL, USA, 2016. [Google Scholar]
- Bai, G.; Gu, H.; Zhang, H.; Meng, L.; Tang, D. V-shaped wing design and hydrodynamic analysis based on moving base for recovery AUV. In Proceedings of the 2018 WRC Symposium on Advanced Robotics and Automation (WRC SARA), Beijing, China, 16 August 2018; pp. 320–325. [Google Scholar]
- Palomeras, N.; Vallicrosa, G.; Mallios, A.; Bosch, J.; Vidal, E.; Hurtos, N.; Carreras, M.; Ridao, P. AUV homing and docking for remote operations. Ocean Eng. 2018, 154, 106–120. [Google Scholar] [CrossRef]
- Meng, L.; Lin, Y.; Gu, H.; Bai, G.; Su, T.C. Study on dynamic characteristics analysis of underwater dynamic docking device. Ocean Eng. 2019, 180, 1–9. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, Y.; Cao, J.; Wang, B.; Li, Y. AUV docking experiments based on vision positioning using two cameras. Ocean Eng. 2015, 110, 163–173. [Google Scholar] [CrossRef]
- Lin, M.; Yang, C. Auv docking method in a confined reservoir with good visibility. J. Intell. Robot. Syst. 2020, 100, 349–361. [Google Scholar] [CrossRef]
- Vu, M.T.; Choi, H.S.; Nhat, T.Q.M.; Nguyen, N.D.; Lee, S.D.; Le, T.H.; Sur, J. Docking assessment algorithm for autonomous underwater vehicles. Appl. Ocean Res. 2020, 100, 102180. [Google Scholar] [CrossRef]
- Hardy, T.; Barlow, G. Unmanned Underwater Vehicle (UUV) deployment and retrieval considerations for submarines. In Proceedings of the International Naval Engineering Conference and Exhibition 2008, Hamburg, Germany, 13 April 2008. [Google Scholar]
- Mawby, A.; Wilson, P.; Bole, M.; Fiddes, S.P.; Duncan, J. Manoeuvring Simulation of Multiple Underwater Vehicles in Close Proximity; SEA (Group) Ltd.: Frome, UK, 2010. [Google Scholar]
- Kim, J.; Lee, G. A study on the UUV docking system by using torpedo tubes. In Proceedings of the 2011 8th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Incheon, Republic of Korea, 23–26 November 2011; pp. 842–844. [Google Scholar]
- Meng, L.; Lin, Y.; Gu, H.; Su, T.C. Study on dynamic docking process and collision problems of captured-rod docking method. Ocean Eng. 2019, 193, 106624. [Google Scholar] [CrossRef]
- Yang, Q.; Liu, H.; Yu, X.; Zhang, W.; Chen, J. Attitude constraint-based recovery for under-actuated AUVs under vertical plane control during the capture stage. Ocean Eng. 2023, 281, 115012. [Google Scholar] [CrossRef]
- Molland, A.F.; Utama, I.K.A.P. Wind Tunnel Investigation of a Pair of Ellipsoids in Close Proximity; University of Southampton: Southampton, UK, 1997. [Google Scholar]
- Molland, A.F.; Utama, I.K.A.P. Experimental and numerical investigations into the drag characteristics of a pair of ellipsoids in close proximity. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2002, 216, 107–115. [Google Scholar] [CrossRef]
- Husaini, M.; Samad, Z.; Arshad, M.R. CFD simulation of cooperative AUV motion. Indian J. Mar. Sci. 2009, 38, 346–351. [Google Scholar]
- Zhang, D.; Chao, L.; Pan, G. Analysis of hydrodynamic interaction impacts on a two-AUV system. Sh. Offshore Struct. 2019, 14, 23–34. [Google Scholar] [CrossRef]
- Rattanasiri, P.; Wilson, P.A.; Phillips, A.B. Numerical investigation of a fleet of towed AUVs. Ocean Eng. 2014, 80, 25–35. [Google Scholar] [CrossRef]
- Mitra, A.; Panda, J.P.; Warrior, H.V. Experimental and numerical investigation of the hydrodynamic characteristics of Autonomous Underwater Vehicles over sea-beds with complex topography. Ocean Eng. 2020, 198, 106978. [Google Scholar] [CrossRef]
- Zhang, W.; Zeng, J.; Yan, Z.; Wei, S.; Tian, W. Leader-following consensus of discrete-time multi-AUV recovery system with time-varying delay. Ocean Eng. 2021, 219, 108258. [Google Scholar] [CrossRef]
- Wu, L.; Li, Y.; Su, S.; Yan, P.; Qin, Y. Hydrodynamic analysis of AUV underwater docking with a cone-shaped dock under ocean currents. Ocean Eng. 2014, 85, 110–126. [Google Scholar] [CrossRef]
- Meng, L.; Lin, Y.; Gu, H.; Su, T.C. Study on the mechanics characteristics of an underwater towing system for recycling an Autonomous Underwater Vehicle (AUV). Appl. Ocean Res. 2018, 79, 123–133. [Google Scholar] [CrossRef]
- Meng, L.S.; Lin, Y.; Gu, H.T.; Su, T.C. Study of the Dynamic Characteristics of a Cone-Shaped Recovery System on Submarines for Recovering Autonomous Underwater Vehicle. China Ocean Eng. 2020, 34, 387–399. [Google Scholar] [CrossRef]
- Fedor, R. Simulation of a Launch and Recovery of an UUV to an Submarine; KTH Royal Institute of Technology: Stockholm, Sweden, 2009. [Google Scholar]
- Leong, Z.Q.; Saad, K.; Ranmuthugala, S.D.; Duffy, J.T. Investigation into the hydrodynamic interaction effects on an AUV operating close to a submarine. In Proceedings of the Pacific 2013 International Maritime Conference, Sydney, Australia, 7–9 October 2013; pp. 1–11. [Google Scholar]
- Leong, Z.Q.; Ranmuthugala, D.; Penesis, I.; Nguyen, H. Quasi-static analysis of the hydrodynamic interaction effects on an autonomous underwater vehicle operating in proximity to a moving submarine. Ocean Eng. 2015, 106, 175–188. [Google Scholar] [CrossRef]
- Leong, Z.Q.; Ranmuthugala, D.; Forrest, A.L.; Duffy, J. Numerical investigation of the hydrodynamic interaction between two underwater bodies in relative motion. Appl. Ocean Res. 2015, 51, 14–24. [Google Scholar]
- Du, X.; Zheng, Z.; Guan, S. Numerical Calculation of Hydrodynamic Interactions of Submarine Flow on AUV. In Proceedings of the OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–5. [Google Scholar]
- Groves, N.C.; Huang, T.T.; Chang, M.S. Geometric Characteristics of DARPA SUBOFF Models (DTRC Model Nos 5470 and 5471); David Taylor Research Center: Bethesda, MD, USA, 1989. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Larsson, L.; Raven, H. Ship Resistance and Flow; Society of Naval Architects and Marine Engineering: New York, NY, USA, 2010. [Google Scholar]
- Liu, H.; Huang, T.T. Summary of DARPA SUBOFF Experimental Program Data; Naval Surface Warfare Center Carderock Div: Bethesda, MD, USA, 1998. [Google Scholar]
- Huang, T.; Liu, H.L.; Groves, N.; Forlini, T.; Blanton, J.; Gowing, S. Measurements of flows over an axisymmetric body with various appendages in a wind tunnel: The DARPA SUBOFF experimental program. In Proceedings of the 19th Symposium on Naval Hydrodynamics, Seoul, Republic of Korea, 23–28 August 1992; pp. 312–346. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| - | Length (m) | Radius/Width (m) | Height (m) |
|---|---|---|---|
| SUBOFF AFF-8 | 4.356 (LSUBOFF) | 0.254 (RSUBOFF) | - |
| submarine | 87.120 (Lsubmarine) | 5.080 (Rsubmarine) | - |
| AUV | 1.080 (LAUV) | 0.923 (WAUV) | 0.307 (HAUV) |
| Boundary | Boundary Parameter |
|---|---|
| Inlet | Velocity Inlet, flow speed = (Uo,0,0) m/s, turbulence intensity 0.01 |
| Outlet | Pressure Outlet, hydrostatic pressure |
| Bottom/side/top | Same as inlet |
| Submarine | Impermeability wall with no-slip condition |
| AUV | Impermeability wall with no-slip condition |
| Symmetry plane | Symmetry plane |
| - | Coarse Mesh | Medium Mesh | Fine Mesh | Experimental Results |
|---|---|---|---|---|
| Mesh number (Million) | 2.582 | 3.846 | 6.823 | - |
| Resistance (N) | 275.6 | 280.25 | 281.4 | 283.8 |
| Error (%) | 2.89 | 1.25 | 0.85 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, W.; Ma, C.; Jiang, D.; Zhang, T.; Wu, T. The Hydrodynamic Interaction between an AUV and Submarine during the Recovery Process. J. Mar. Sci. Eng. 2023, 11, 1789. https://doi.org/10.3390/jmse11091789
Luo W, Ma C, Jiang D, Zhang T, Wu T. The Hydrodynamic Interaction between an AUV and Submarine during the Recovery Process. Journal of Marine Science and Engineering. 2023; 11(9):1789. https://doi.org/10.3390/jmse11091789
Chicago/Turabian StyleLuo, Wanzhen, Caipeng Ma, Dapeng Jiang, Tiedong Zhang, and Tiecheng Wu. 2023. "The Hydrodynamic Interaction between an AUV and Submarine during the Recovery Process" Journal of Marine Science and Engineering 11, no. 9: 1789. https://doi.org/10.3390/jmse11091789