1. Introduction
In recent years, the increased focus on sustainable energy production has become a driving force for harnessing offshore renewable energy, including floating solar photovoltaic power plants, ocean currents, and offshore wind, wave, and tidal energy. Consequently, the use of marine power cables has evolved from merely supplying power to isolated offshore facilities to connecting offshore array systems comprising numerous inter-connected installations, resulting in a broader range of applications [
1].
Marine power cables represent a considerable share of the total installation cost of offshore renewable energy facilities. For example, in an offshore wind farm, the power cables constitute up to 10% of the total cost [
2]. In addition, there are high maintenance and repair costs, as well as replacement costs owing to cable failures. According to [
3], the failure of marine power cables is one of the most common reasons for downtime in energy production from offshore wind turbines. For example, the data in [
4] revealed that 80% of offshore wind installations in the UK experienced cable-related incidents that resulted in downtime, leading to annual losses of GBP 22.8 million. Therefore, there is significant concern regarding the reliability and long-term serviceability of marine cables [
5,
6,
7]. Marine cables must withstand a vast dynamic loading regime when attached to moving floating structures, subjected to waves and current, and thus, they are susceptible to fatigue failures. Some examples of their application include connecting grids internationally [
8], interconnecting wind turbine generators in offshore wind farms, and connecting wave energy converters (WECs) in wave parks.
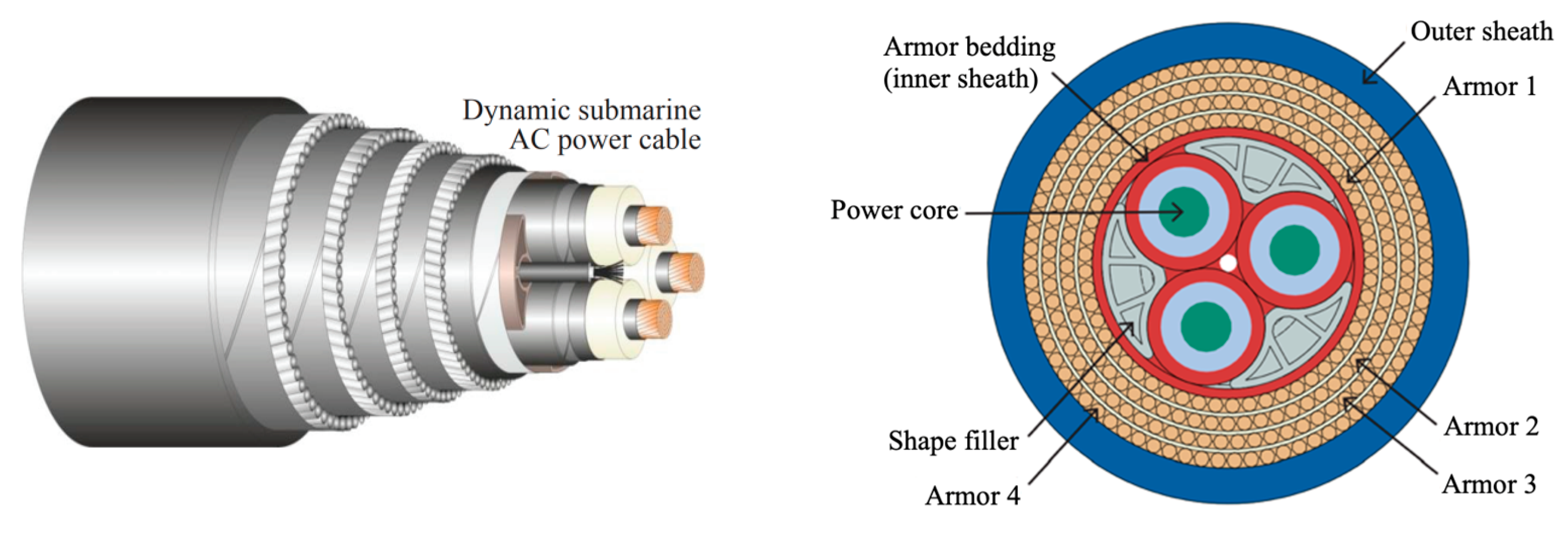
Based on their mechanical stiffness characteristics, marine power cables are typically divided into two categories: static and dynamic. Static power cables have high axial, bending, and torsion mechanical stiffnesses and are used for fixed installations offshore where the cable is placed on the seabed in a stationary condition. Dynamic power cables have significantly lower bending and torsion mechanical stiffnesses compared to static cables, i.e., they are more flexible, and therefore, they are more suitable for floating installations wherein the cable must be able to follow the installation’s motions. Trends indicate that the number of offshore renewable energy production farms will increase in the future; hence, reliable and cost-efficient designs must be developed for marine power cables [
9]. For example, as offshore wind farms move into deeper waters with higher and steadier wind speeds and wave and tidal energy converters progress, the need for dynamic cables with high reliability and long-term serviceability will increase [
10]. Therefore, to develop new dynamic marine power cables, a good understanding of their specific mechanical characteristics—especially the cable stiffness properties, which affect the motion-related flexibility and mechanical stress in the cable components, thereby influencing their mechanical lifetime—is essential for ensuring long-term serviceability [
11].
This investigation focuses on dynamic marine power cables that are suitable for devices that harness energy from ocean currents, waves, and tides. To increase their economic viability, such devices are designed as groups of arrays [
12]. Dynamic power cables transfer the generated electricity from each device to a central hub, from where it is transmitted ashore by a static cable. The dynamic cables must be able to withstand all the mechanical stresses that can occur during their manufacturing, handling, transport, installation, and operation. In contrast to static cables, the operating conditions of dynamic cables are extremely “dynamic” as the environmental loads and motions induced by the floating/moving device result in cyclic motions that induce mechanical stresses in the cable components; see Reference [
11] for an example of a heaving point absorber wave energy converter. Numerical simulation models are important tools for designing, analyzing, and assessing a cable’s response and characteristics under the as-installed conditions in a virtual environment. However, to achieve a trustworthy and realistic simulation of the cable’s limit states (e.g., the ultimate and fatigue limit states), the verified mechanical properties of the cable must be included in the numerical model.
Power cables generally comprise a helically wound structure of cylindrical components and typically have a high tensile strength owing to a large axial stiffness. The bending and torsion stiffnesses are lower than the axial stiffness, which gives the cable desirable flexible properties. The cable’s flexibility can be attributed to sliding between its components. Owing to slip and stick phenomena between the components, together with fretting and two types of contacts, modeling the internal dynamics of cables with high accuracy is a significant challenge. The two types of contacts that occur within a cable are the inline and trellis (point) contacts. The inline contact occurs within each helical layer and between the core and the first helical layer, whereas the trellis contact occurs between the helical layers. A poor mechanical design may leave the cable vulnerable to damage, resulting in longer unavailability and higher repair costs [
13].
The mechanical characteristics of power cables can be derived from a combination of theoretical and empirical models developed through years of experience; for an example, see [
9]. Commercial software and numerical methods are used for developing the principal design of power cables by simulating the environmental loads applied on the floating offshore installations, as well as the resultant forces and stresses sustained by the connecting dynamic cables. In [
9,
14,
15,
16,
17], the authors revealed that large uncertainties remain regarding the precise characterization of the forces acting on a cable structure and their effects on its stress and deformation. Many of these uncertainties are associated with the section properties and the fatigue characteristics of the cable [
9,
14,
15]. Therefore, laboratory tests on dynamic cables are required to validate, verify, and calibrate the numerical approaches and models. Sharing the results of experiments on different types of cables is necessary to ensure the safe and reliable transmission of electricity from offshore installations ashore with long-term serviceability, which is essential to reduce the levelized cost of electricity (LCoE) from marine renewable energy harnessing devices.
Dynamic marine power cables on the market contain armor layers made of metallic materials. For floating offshore wind applications, they provide reliable mechanical protection, enabling installation and operation during rough conditions. They also provide mechanical properties that reduce the risk of structural integrity degradation if appropriately designed, such as fatigue, fretting, and wear caused by cyclic loading conditions from the cable’s motions. Many studies in the literature have presented results from numerical simulations and experiments of armored dynamic power cables [
18,
19,
20,
21,
22,
23]. Most of them emphasized bending-induced loading conditions and fatigue experiments since this loading mode causes wear and fretting damage to the cable’s parts and components. It was highlighted in [
24] that there is a need to fully determine a cable’s mechanical properties for use in numerical models (such as an FE model). It was recommended that a cable’s global/component mechanical properties from tensile, bending, and torsion tests should always be determined. The recommendation was confirmed in the feasibility study of suspended inter-array cabling between floating offshore wind turbines presented in [
25]. In their study, the bending radius of the cable design was critical for the cable installation, and to make reliable predictions using numerical models and simulations, not only the bending stiffness but also the axial and torsion stiffnesses are required to capture the motions of the cable correctly. In addition, reliability analyses of armored dynamic cables have been presented by [
26,
27,
28,
29], accounting for uncertainties in loads and geometric and material variables. Preliminary design of global cable configurations requires reliable data on design variables, e.g., mechanical stiffness properties in numerical models. It was highlighted by [
28] that structured test programs with component testing are needed to reduce failure rate uncertainty, and free sharing of experimental data will benefit everyone.
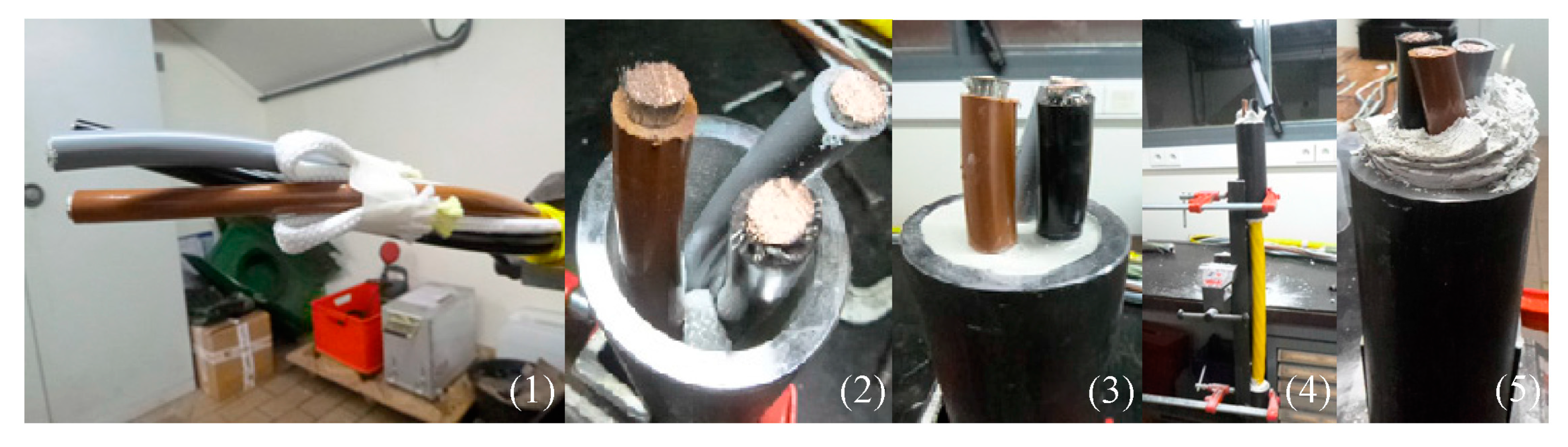
This paper presents the results and observations of mechanical tests carried out on three dynamic marine power cables without metallic armor layers using the experimental facilities at the SMC/MAST laboratory in Université Gustave Eiffel (Nantes, France) as part of the EU-funded research project Seasnake (
https://www.seasnake.eu; accessed on 8 September 2023). To the best of our knowledge, similar experimental data for determining the characteristics of such dynamic cables are not available in the literature. Therefore, an important goal of this study is to share the obtained test data with others to aid the design and structural performance analysis of marine power cables without metallic armor. The tested cables were part of an experimental testing program that compared reference marine cables available on the market against new innovative dynamic marine power cables without metallic armor layers. The testing program included tension, bending, torsion, and fatigue testing to determine the mechanical characteristics required by, among others, designers and researchers for simulating and analyzing the reliability of marine cables used in offshore marine renewable energy facilities. It was shown in [
11] that the loading rate for marine power cables used for WECs is low. Hence, the tests presented in the current study were carried out at a low loading speed to exclude any influence from strain-rate effects on the cables’ mechanical properties. The literature review in [
30] on the failure experienced by pipelines, risers, and umbilical cables revealed that the major failure modes observed in umbilical power cables occur under combinations of cyclic axial, bending, and torsion loads, which result in fatigue and wear.
4. Discussion
The 1 kV cable tested in this study has several similarities in its cable design with the 1.2 kV cable studied by the lead author in [
11,
15]. The two major differences between these two cables are the difference in the lay angle and the lack of a fiber optic cable in the center of the 1.2 kV cable. Comparing the mechanical stiffnesses—
EA,
EI, and
GKv—of the two cables, the 1 kV cable generally has higher axial and torsional stiffnesses, whereas the 1.2 kV cable has a higher bending stiffness. The differences between these values are statistically reliable and can be attributed to the differences in the cables’ designs.
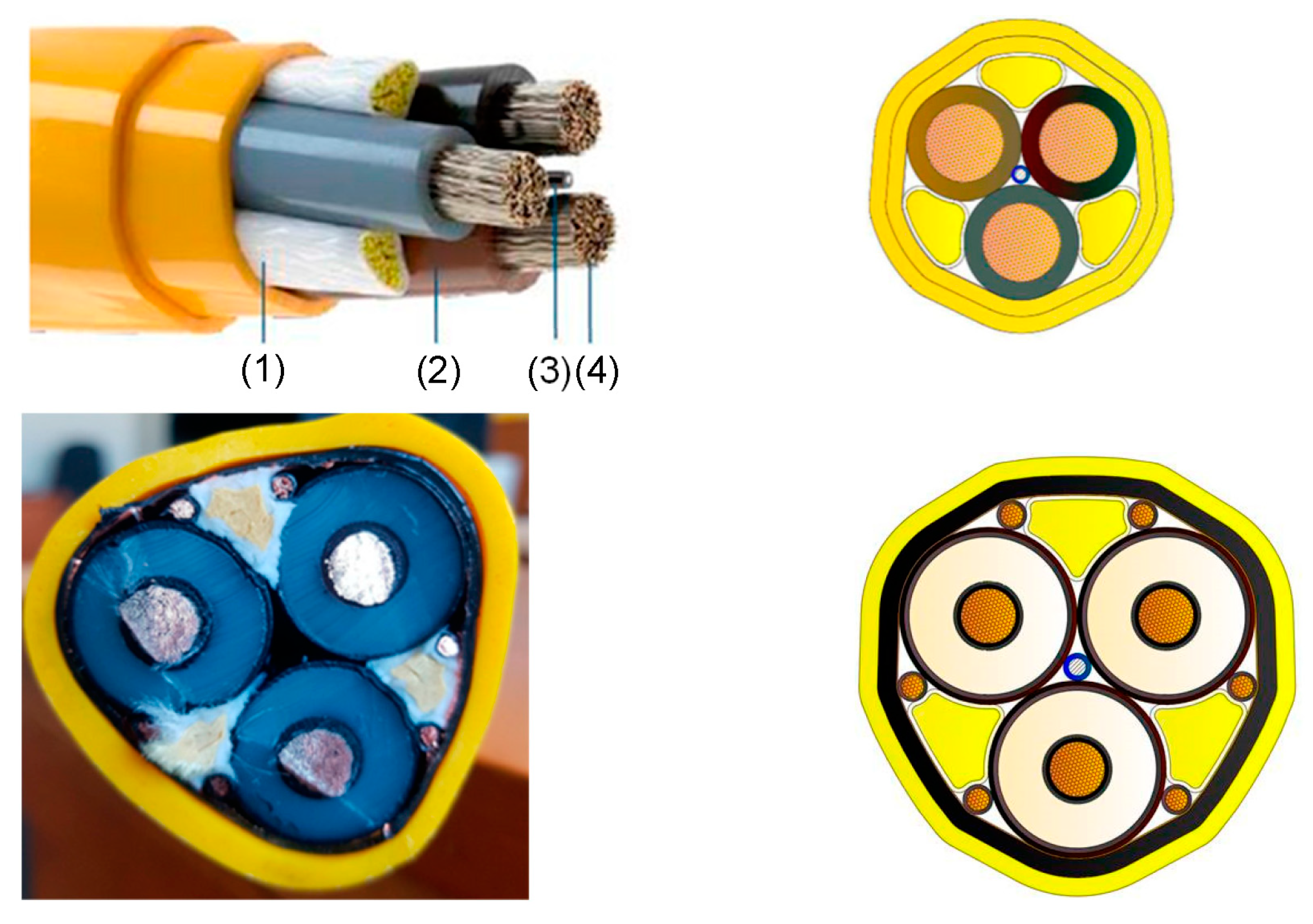
The three cables presented and tested in this study have unconventional designs compared to most dynamic marine power cables. Typically, marine power cables have armor layers made of metallic materials, whereas the cables in this study lack such metallic armor. The aramid fiber ropes substitute the metallic armor layers, and by integrating them into the helically wound cable structure, they simultaneously contribute to sufficient mechanical stiffness and flexibility. The test results indicate that this cable design will be necessary for future offshore installations of devices harnessing marine renewable energy, which require dynamic power cables.
All three cables have a fiber optic cable in their centers to meet the technical requirements of dynamic marine power cables. Before the tension, bending, torsion, and fatigue tests were carried out on the whole cable specimens, separate mechanical tests were conducted on the individual fiber optic cables. The primary purpose of these tests was to obtain the mechanical properties of the fiber optic cables to determine whether they could be used as sensors in the fatigue tests. The results from the fiber optic cable tests revealed that their ductility and flexibility characteristics were sufficient to avoid damage during the cyclic loading of the fatigue tests. Unfortunately, as discussed in
Section 3.4, the measurement approach described in
Section 2.2.4 failed to capture the mechanical degradation (wear, fretting, and fatigue) observed during the ocular inspection of the dissected cables.
The results of rotational–bending tests on a similar 1.2 kV cable were presented in [
16]. In that study, the authors designed a test procedure to perform fatigue tests on umbilical cables at 2 Hz to allow fatigue testing with a large number of load cycles in a short time. The setup allowed a variation in the bending radius of the cable but did not include an axial pretension force. During the tests, the cable’s conductors were connected to measuring equipment that measured the electrical conductivity and temperature on the surface of the cable at three points in the middle of the cable. After each test, the cable was dissected for a detailed analysis of its mechanical degradation. Each test was run until a predefined interruption criterion—a 15% drop in electrical conductivity—was reached or after a given number of load cycles (8.6 million) were completed, in which case the test was judged as a run-out test. Similar to the experimental results obtained in the present study, the measurement method used in [
16] faced challenges in indicating and monitoring the mechanical degradation inside the cables. The dissected cables exhibited damage to the conductors’ wires—a combination of wear, fretting, and fatigue damage that could not be differentiated. Although the ocular inspection of the dissected cables showed a complete separation of a large proportion of the conductors’ wires, the electrical conductivity of the cable was only marginally affected.
Fretting and wear damages to the conductors’ wires, caused primarily by cyclic bending loads, have been recognized as a challenge for marine cables with metallic armor [
18,
19,
20,
21,
22,
23]. The current study showed that this is also challenging for marine cables without metallic armor. Due to their high flexibility (low bending stiffness), fretting and wear will dominate the structural degradation of the conductors’ wires. More research is needed to cope with this advanced contact mechanics problem to reduce the internal damage to the power cables and offer long-lasting, reliable cable designs without metallic armor.
The results of the tests conducted in this study may be used by scholars to develop numerical simulation models of offshore installations that harness marine renewable energy. As described in
Section 1, marine power cables are a vital component of such installations; therefore, they must be considered as important as all the other components and modeled and designed accordingly. The test data and results of the three cables are required to describe and model the cable’s characteristics and structural response in finite element models. As such information is scarce in the available literature for marine cables without metallic armor, the results presented herein can contribute to further developing new cables and analyzing their properties. Moreover, the results can form a basis for parameter sensitivity studies in cable structural response assessments to develop or propose new cable designs. They may also be used to redesign cable connections (e.g., bending restrictors) or to identify positions between the cable connection locations that may require submerged floaters to create lazy-Z structures below the sea surface, thereby reducing the axial forces and cable motions that can affect the long-term fatigue life of the cable.
5. Conclusions
Dynamic marine power cables without external metallic armor have been developed in recent years for offshore installations of floating devices that harness renewable energy. The armor is replaced by mechanically strong synthetic aramid fiber ropes that are integrated into the cable’s helically wound structure to simultaneously provide the required mechanical stiffness and flexibility. These types of cables have several advantages for application in cable systems in offshore installations comprising several devices. Such cables are mainly applied as free-hanging cables below the sea surface that do not make contact with the seabed. A proper cable design with suitable mechanical characteristics can provide cost-efficient solutions with lower installation, maintenance, and repair costs compared to other types of cables with metallic armor.
The study’s main contribution is the results from conducted mechanical tests on marine cables without external metallic armor, which are scarce in the literature. The results can be used to calibrate numerical models of this type of dynamic marine power cable in the initial design of, e.g., inter-array cables between floating wave energy converters.
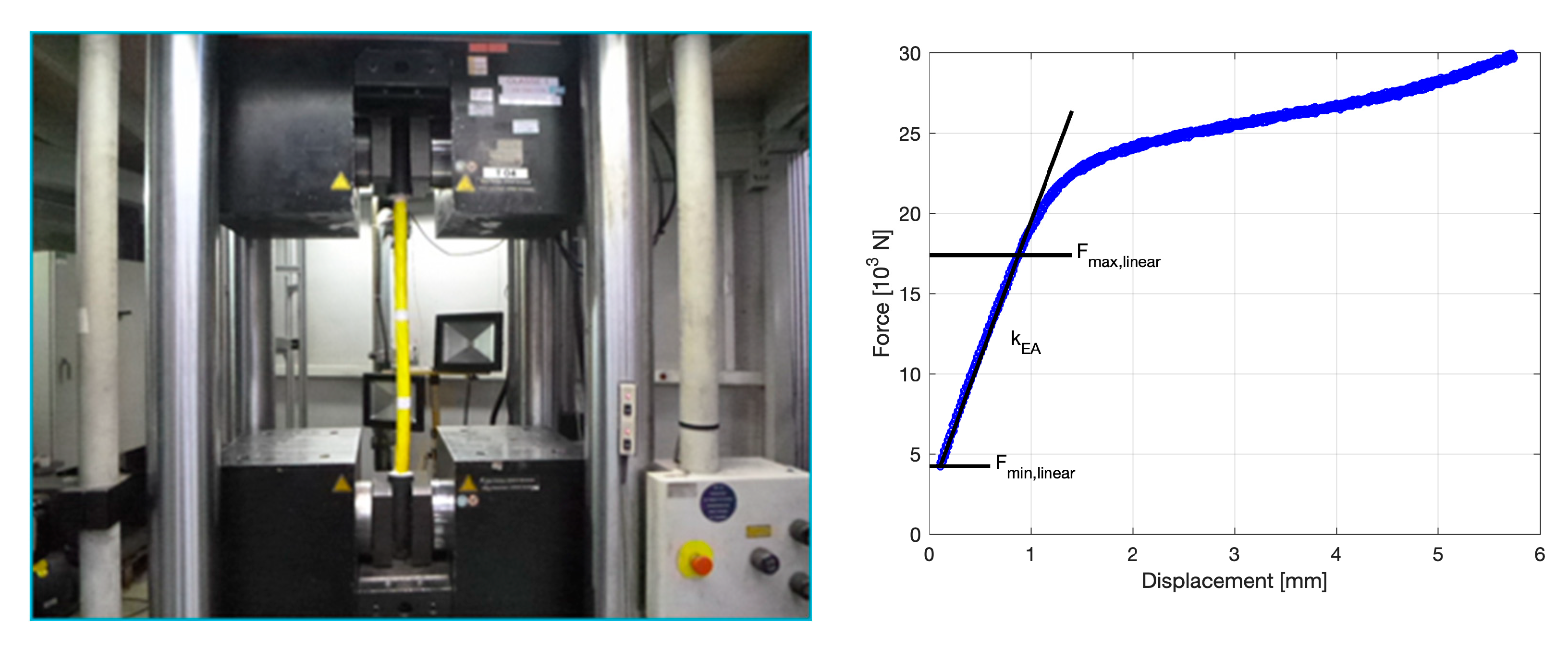
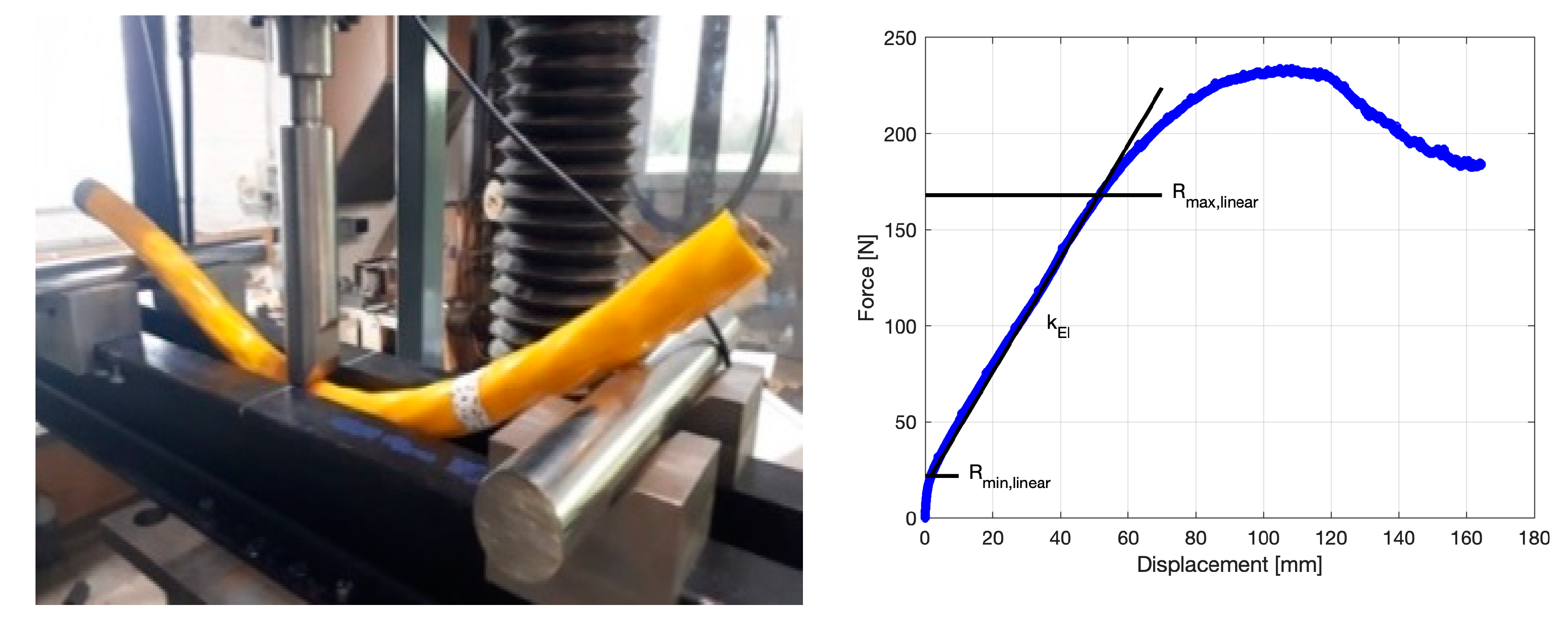
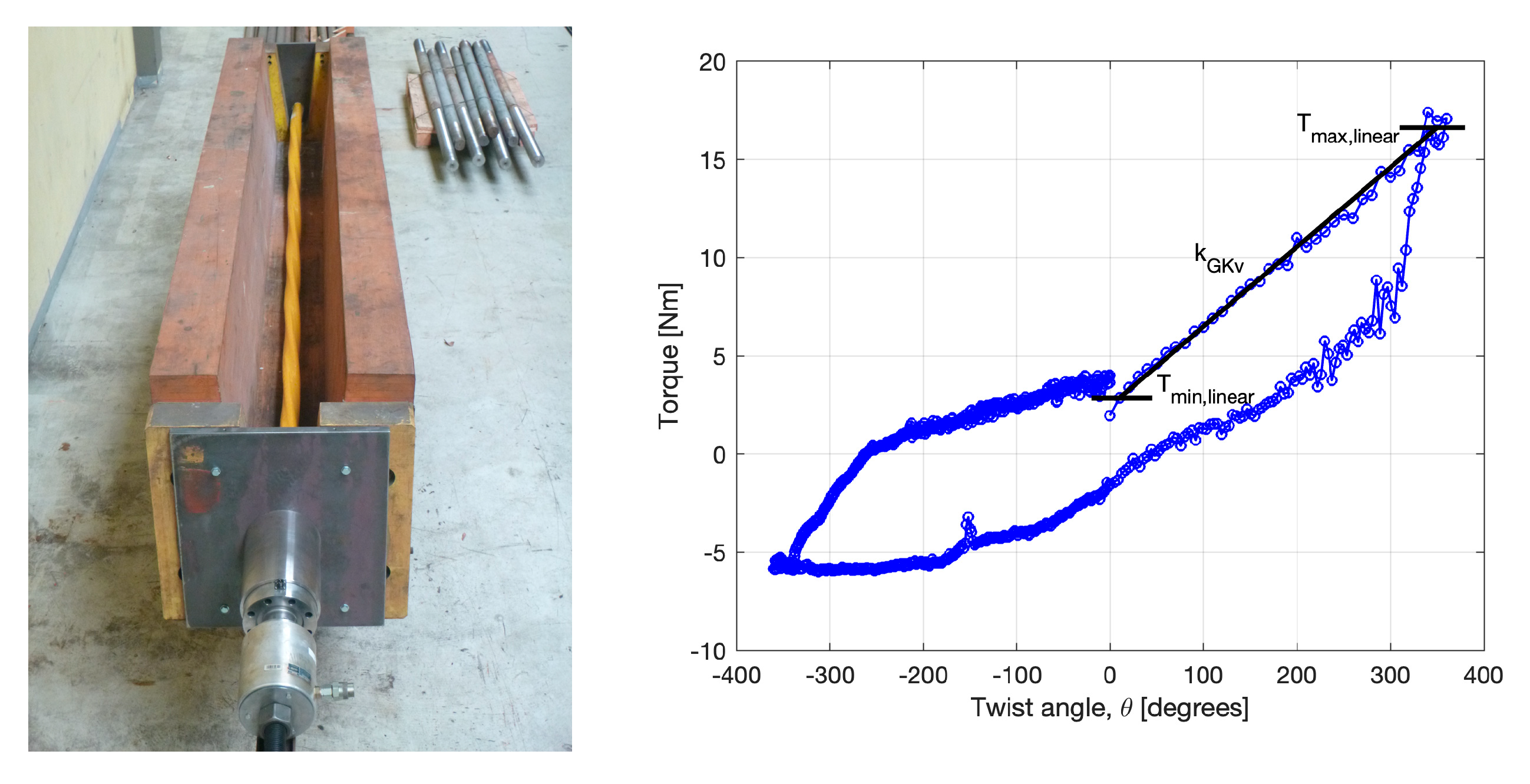
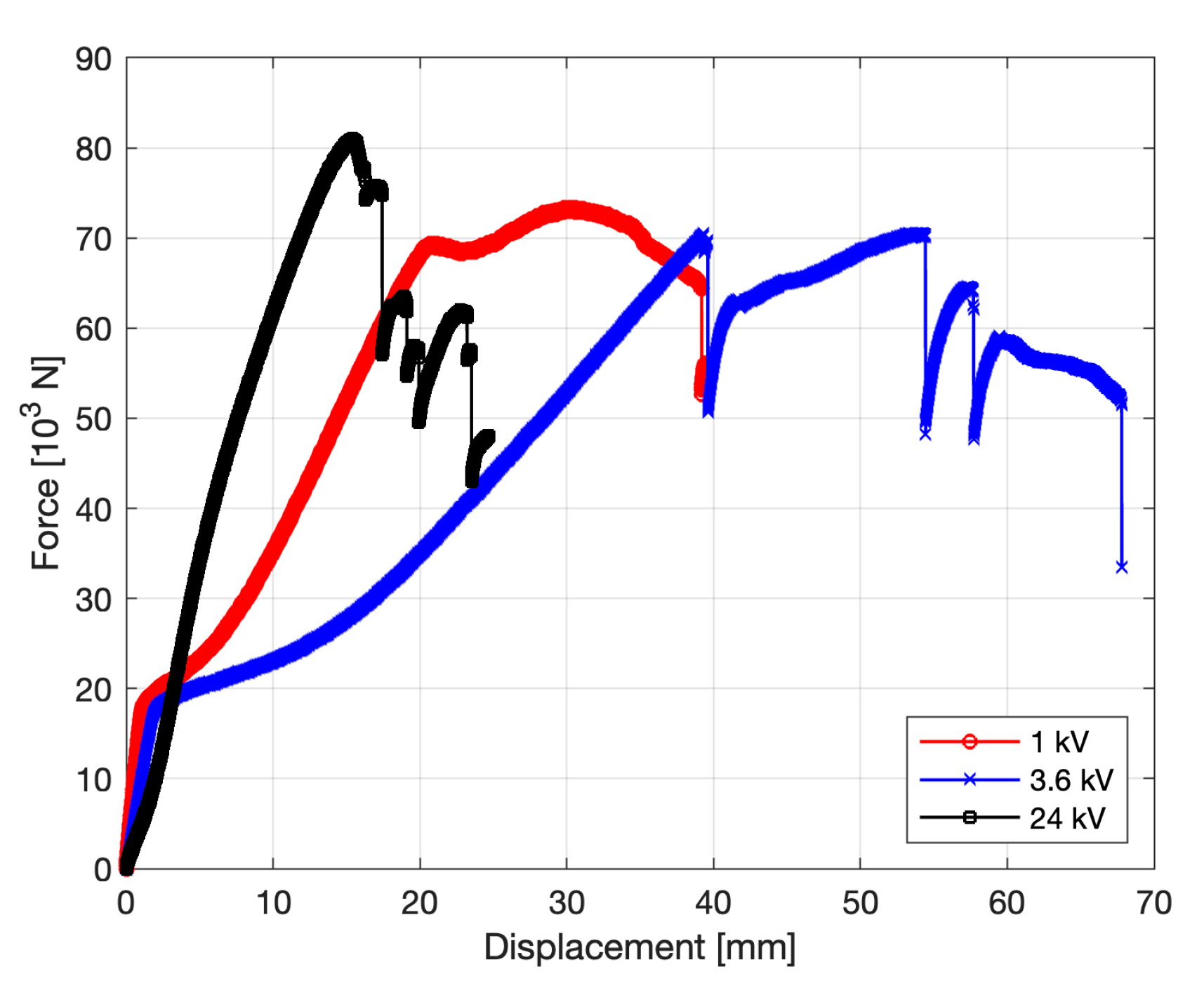
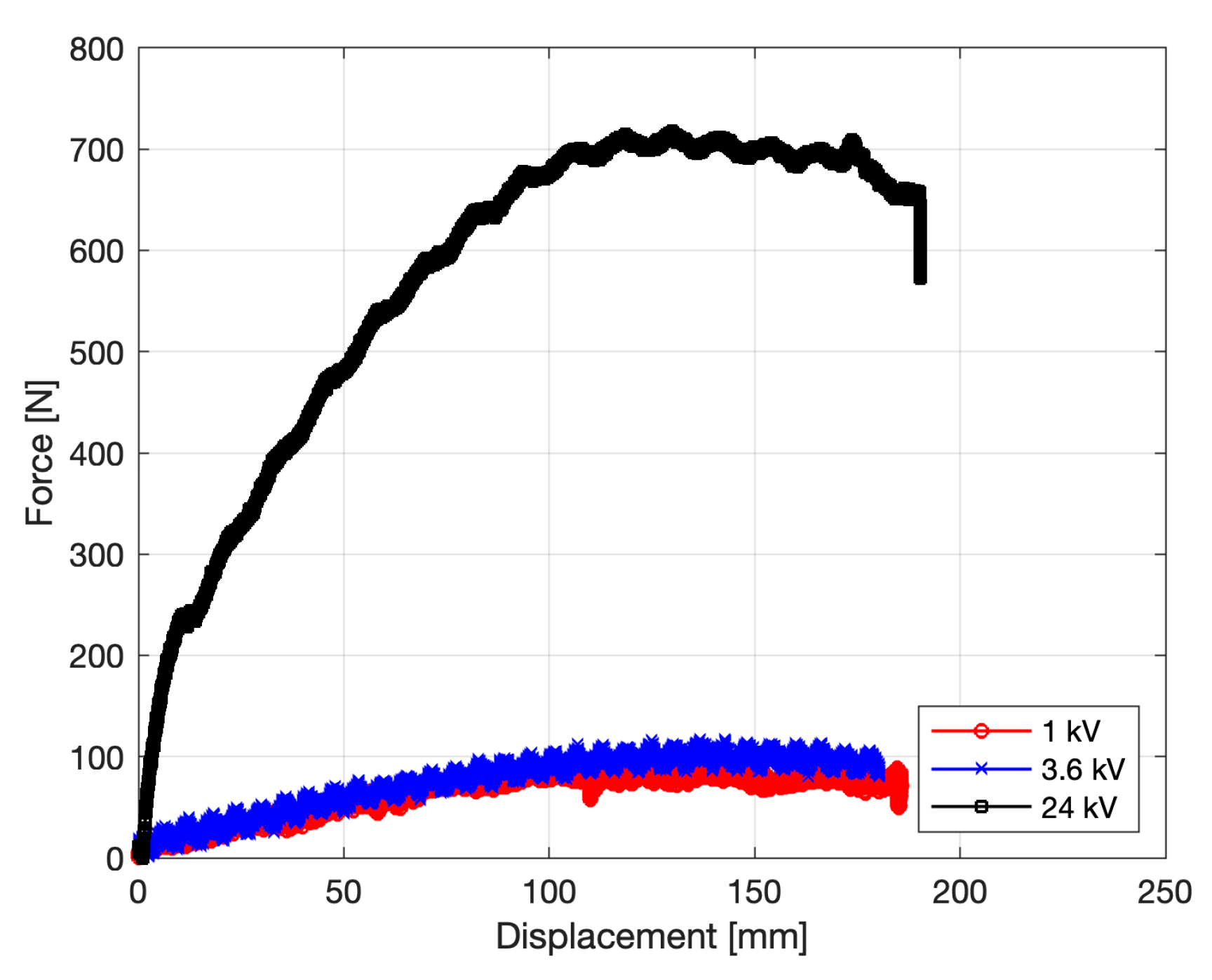
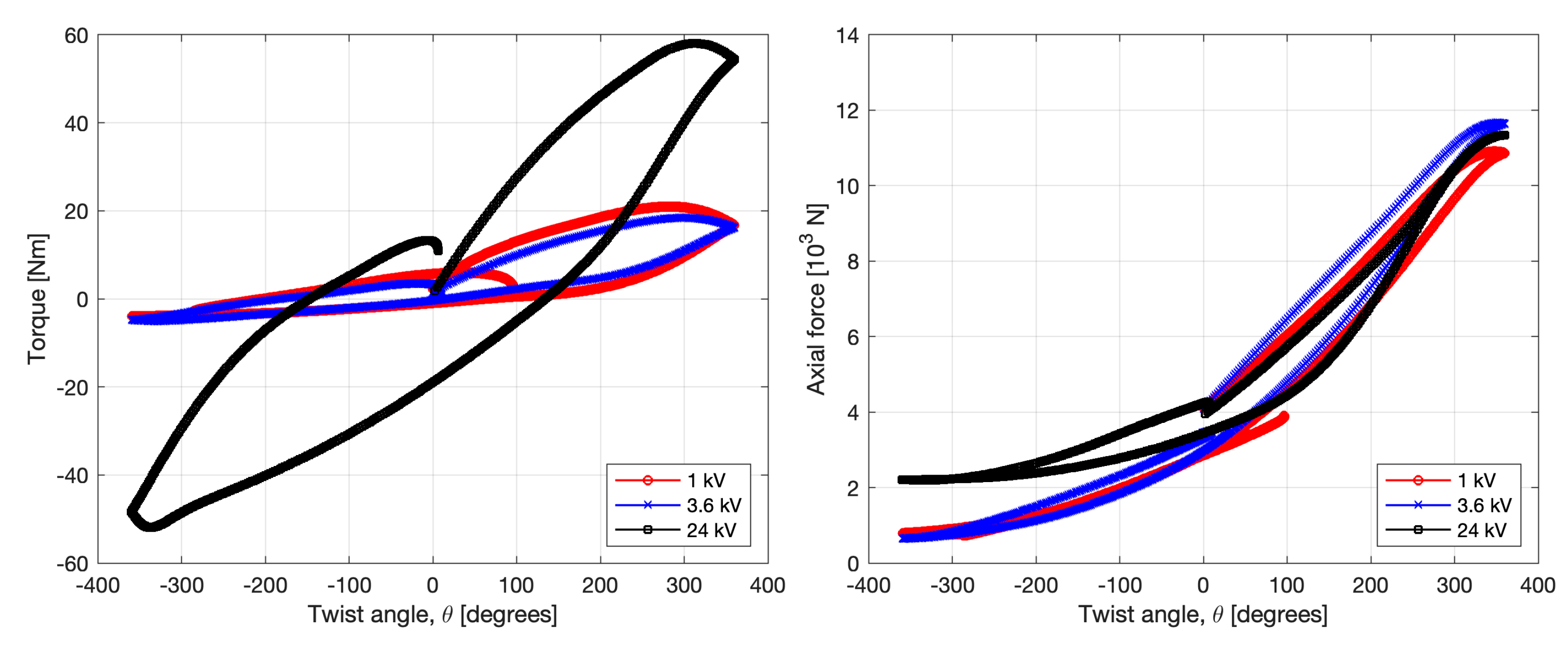
In this study, we conducted extensive mechanical tests on three dynamic marine power cables without metallic armor (1 kV, 3.6 kV, and 24 kV) to be used for floating installations wherein the cable must be able to follow the installation’s motions such as WECs and floating offshore wind installations. Tension, bending, torsion, and fatigue tests were performed to obtain the axial stiffness (EA), bending stiffness (EI), torsion stiffness (GKv), and fatigue performance of the cables under fully reversed (R = −1) cyclic bending loading conditions. The tension, bending, and torsion test results exhibited low standard deviations for the mechanical stiffnesses EA, EI, and GKv. Therefore, there is good repeatability in the preparation of the specimens and the execution of the tests.
The specimen length was varied for the tension and bending tests. The tension test results revealed that the length of the specimen influences the value of the axial stiffness. The longer the specimen, the higher its axial stiffness. This trend was observed for all three cables. Thus, it is essential to be aware of this dependence when the axial stiffness of umbilical cables is determined through tension tests. In contrast, the bending test results did not exhibit the same trend for the 1 kV and 3.6 kV cables, whereas the specimen length had only a minor influence on the results for the 24 kV cable.
The torsion tests were carried out at three magnitudes of the axial pretension force. The results revealed that the higher the pretension force, the higher the torsion stiffness of the cables. As dynamic marine power cables are installed as free-hanging cables between offshore devices or between an offshore device and a power-collecting hub, axial forces will always act on the cable. Over time, marine biofouling will attach to the cable and increase the axial force acting on the cable. From a long-term perspective, considering the structural integrity of the cable, as the axial force changes with time, the torsion stiffness of the cable will change as well. This should be considered while designing the cable and monitored to ensure that the cable’s motions and torsion-induced mechanical stresses will not significantly reduce the fatigue life of the cable.
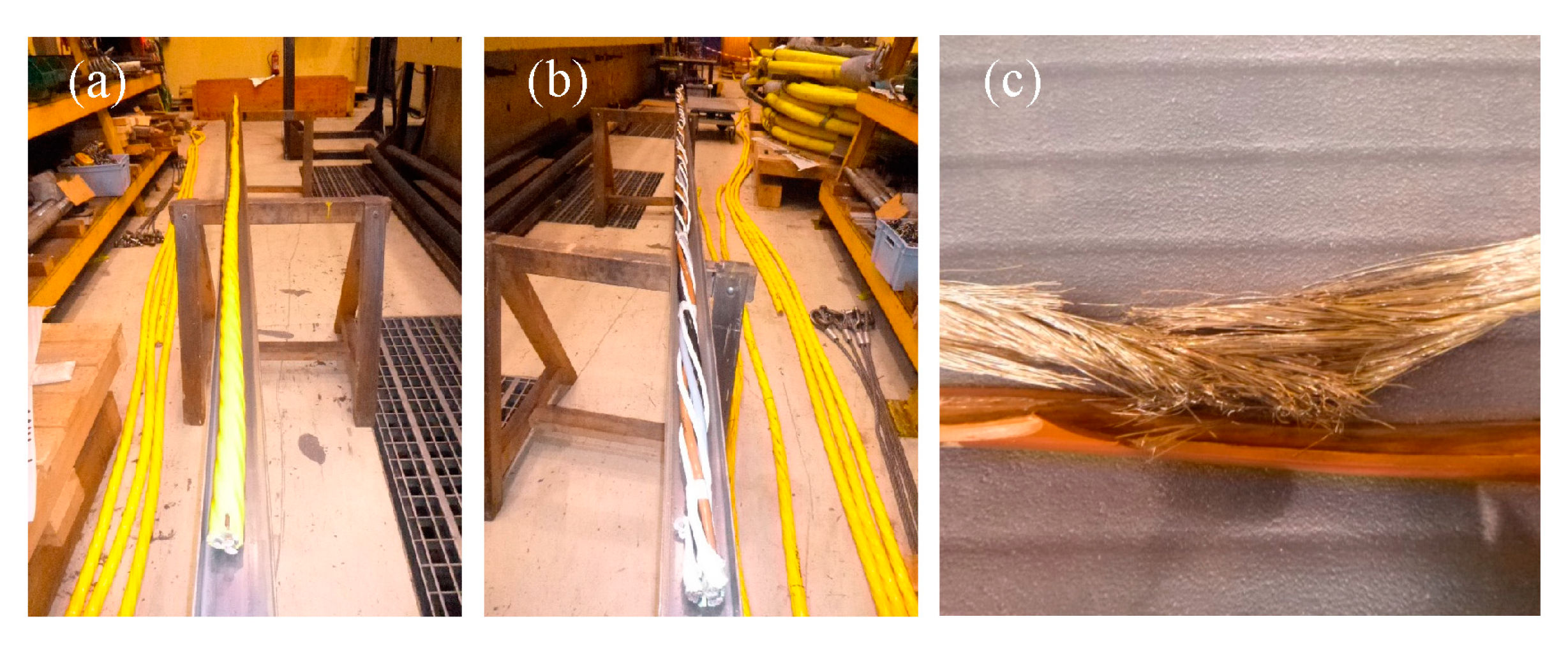
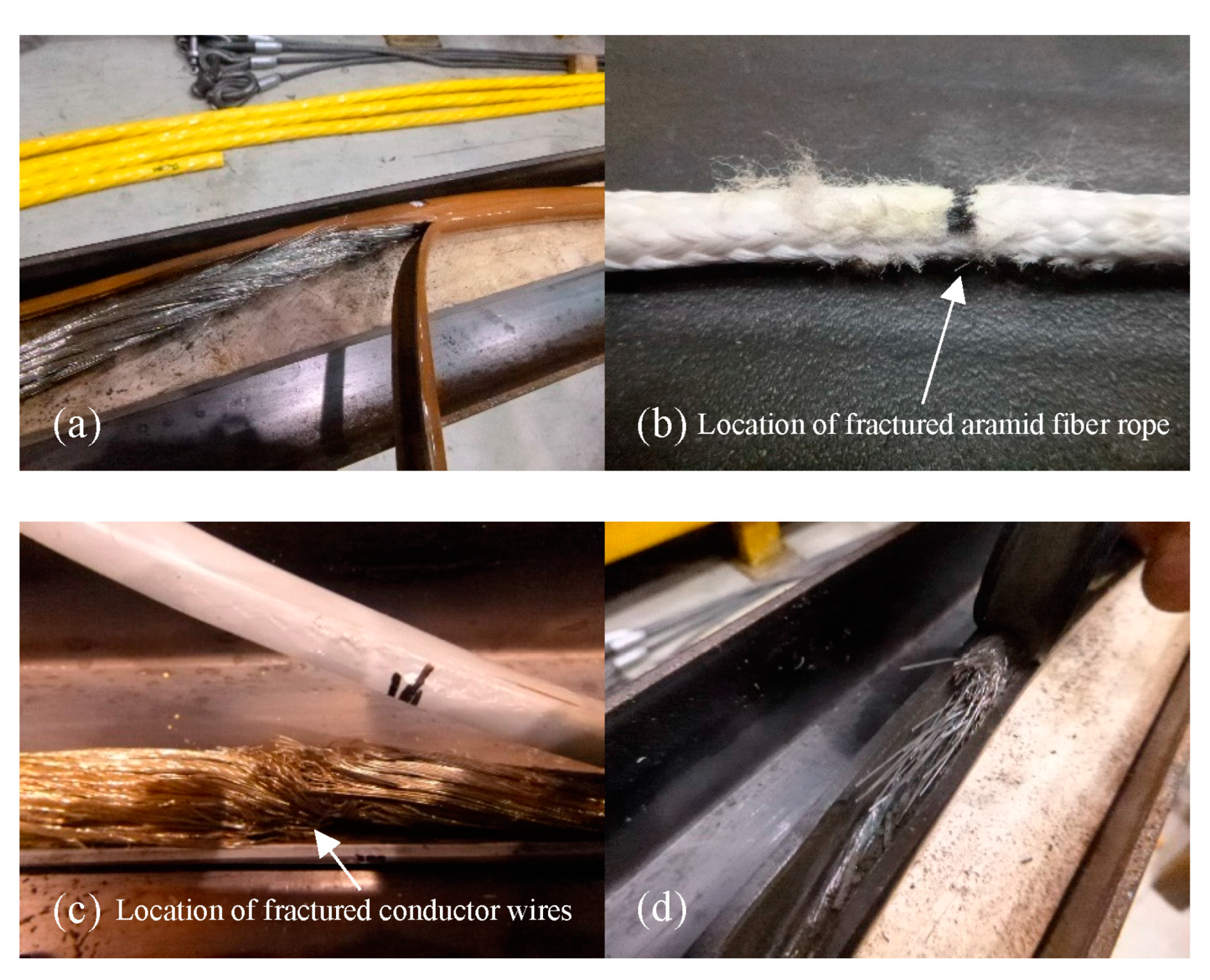
The fatigue monitoring method used in the fatigue tests could not detect or record the mechanical degradation of the components inside the cable during the fatigue tests. However, ocular inspections of the dissected cables after the fatigue tests revealed localized damage to the conductors’ wires in the contact zone between the preformed bending template and the cable. The wires in this zone were worn and fractured owing to a combination of wear, fretting, and fatigue. In the 24 kV cable, some of the aramid wire ropes also suffered significant mechanical damage that almost resulted in the complete fracture of the ropes. However, it should be noted that this damage would be unrealistic in real-world conditions as the load condition that caused the damage will not occur in an actual cable installation—the damage is simply due to the test setup and its loading conditions.
Fatigue testing of umbilical marine power cables is challenging. The complex loading on the cable when it is installed offshore, which includes cyclic axial, bending, and torsion loading conditions that are often out-of-phase, and its impact on the mechanical degradation of the cable’s components during its long service life must be understood better. The test method applied in this study followed the recommendations in a test standard. However, the results indicate that the combined traction-three-point bending fatigue test is not suitable for fatigue testing; the method and test rig proposed by the authors in a former study (see
Section 4) also had similar shortcomings. Hence, considering the future need and applications of dynamic marine power cables offshore, the test methods used for this type of marine power cable must be developed further. Additionally, new monitoring techniques that can measure the mechanical degradation in installed marine power cables must be developed. This would allow the monitoring of different mechanical and electrical degradations inside the cable, thereby enabling timely inspection, maintenance, and repair planning to improve the cost-efficiency of such installations.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}