
Artificial Neural Network-Based Prediction of the Extreme Response of Floating Offshore Wind Turbines under Operating Conditions



Abstract
:1. Introduction
2. Methodology
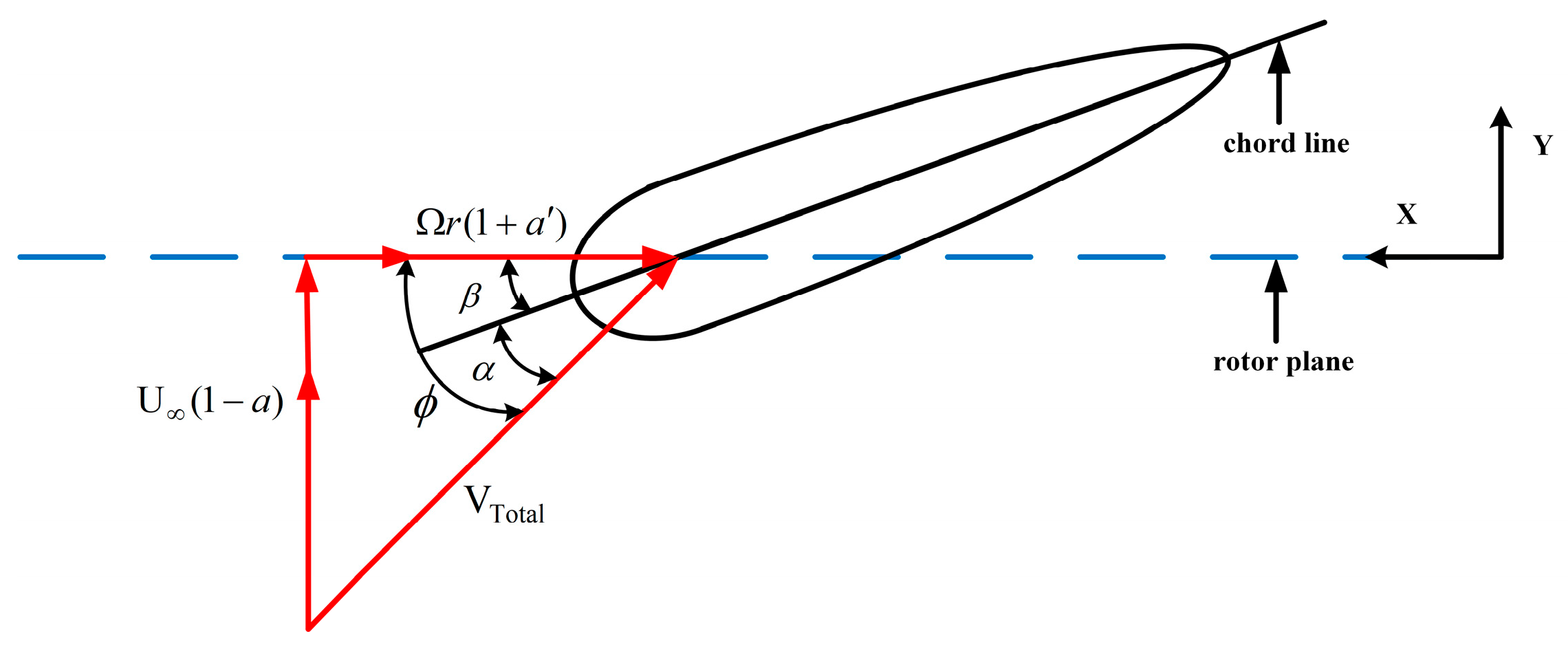
2.1. Aerodynamic Load
2.2. Hydrodynamic Load
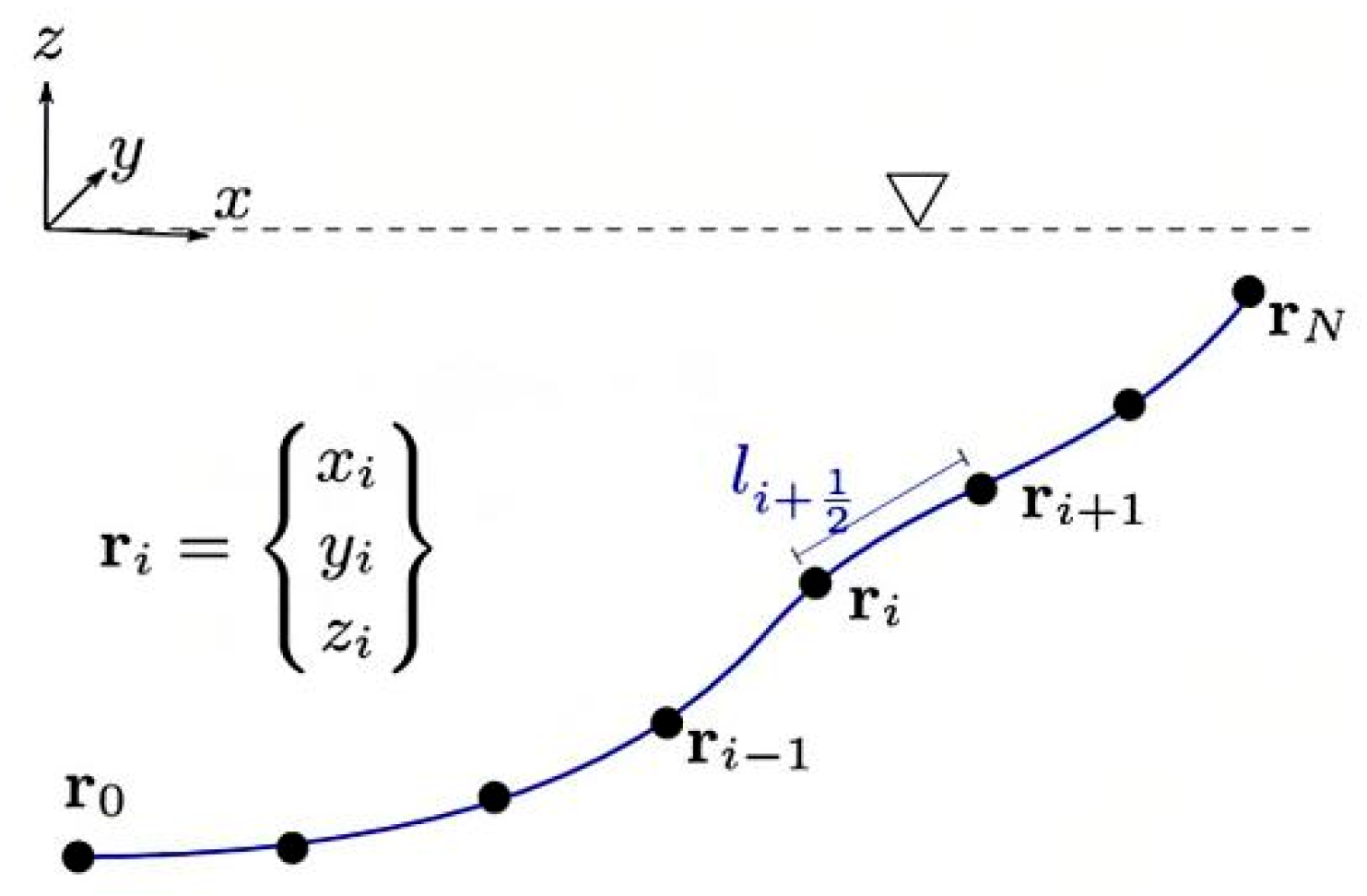
2.3. Mooring Load
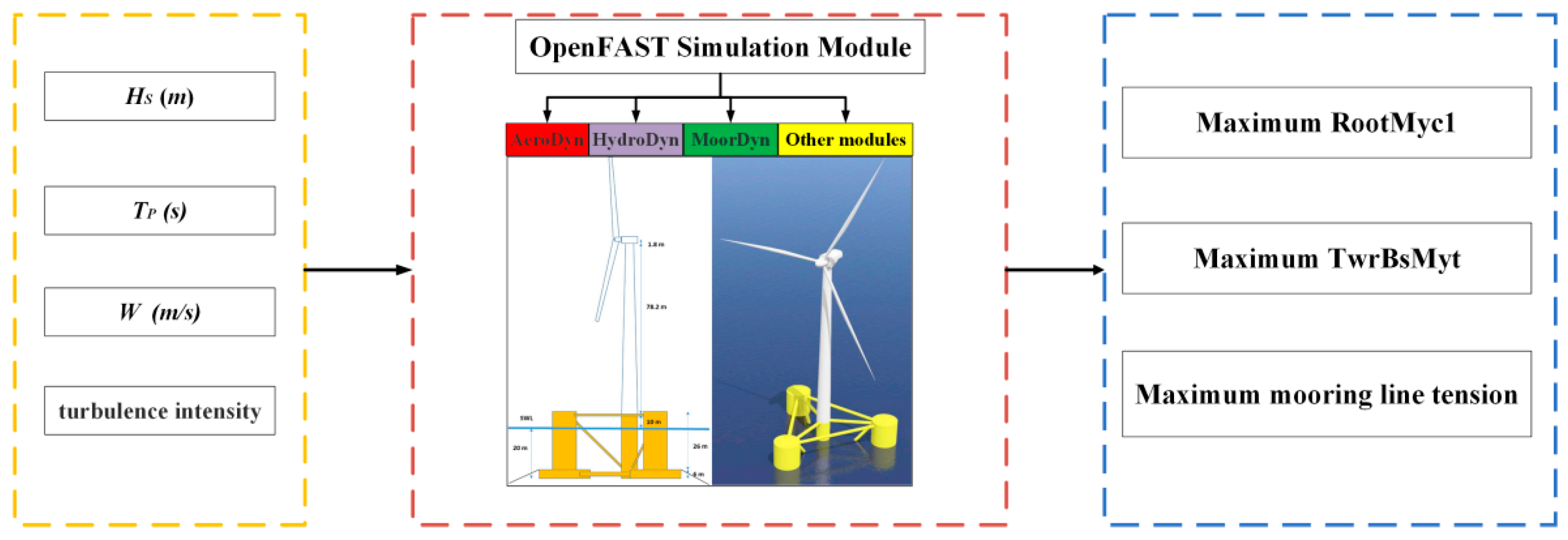
3. Numerical Simulations of FOWT Loads
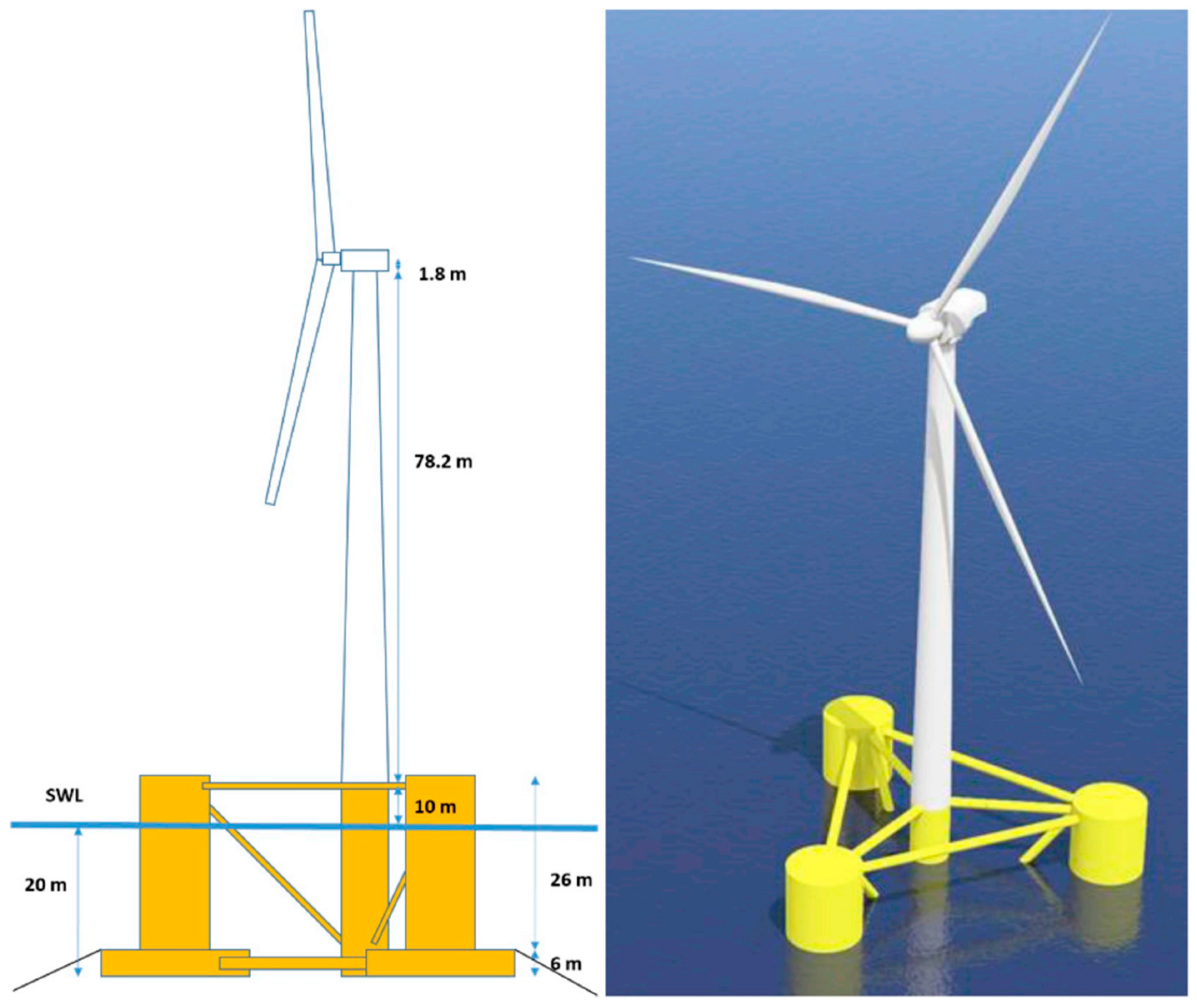
3.1. Description of the FOWT Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Turbine Properties | Value |
|---|---|
| Rotor configuration | Upwind, 3 Blades |
| Cut-in wind speed | 3 m/s |
| Rated wind speed | 11.4 m/s |
| Cut-out wind speed | 25 m/s |
| Rotor mass | 110,000 kg |
| Nacelle mass | 240,000 kg |
| Tower mass | 347,460 kg |
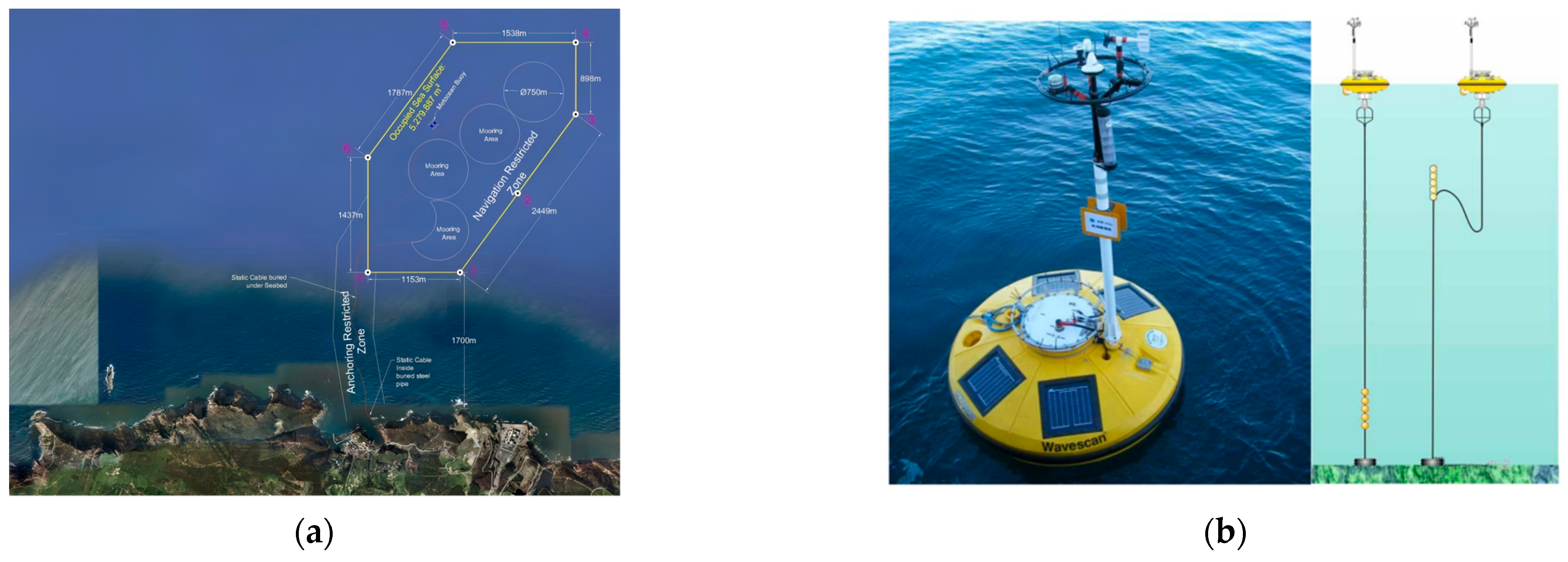
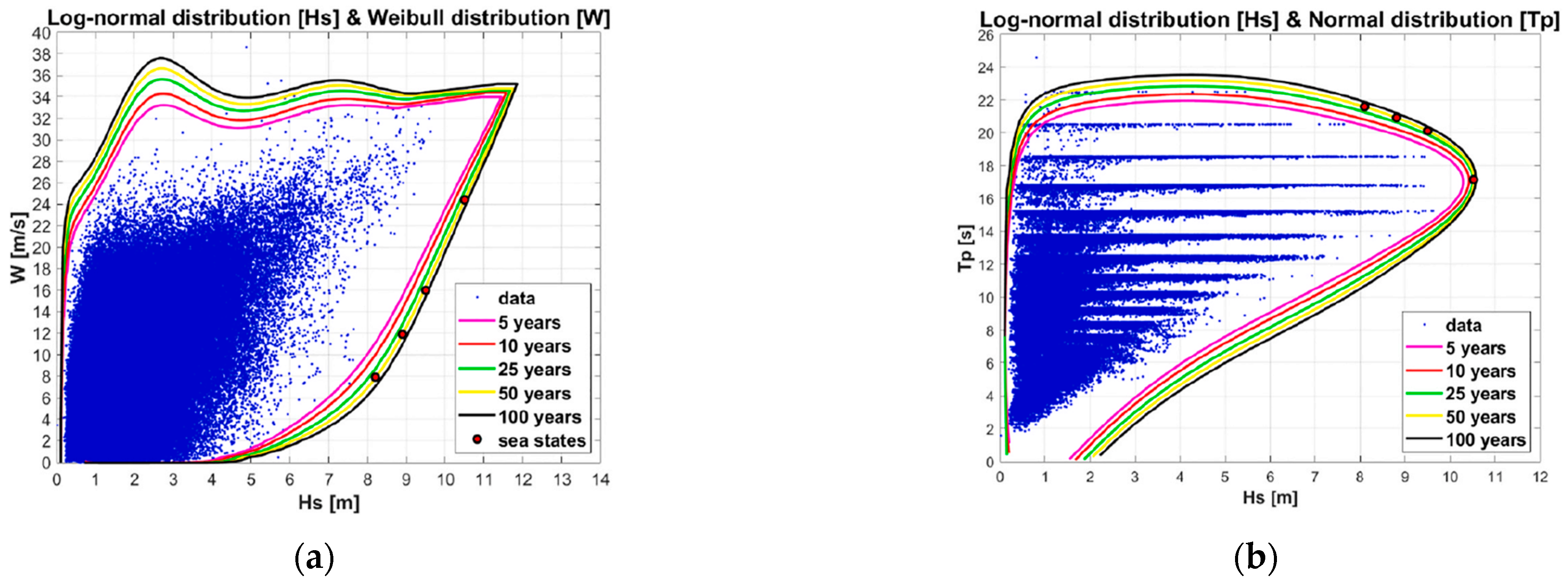
3.2. Marine Environmental Data
3.3. Load Simulation Calculation
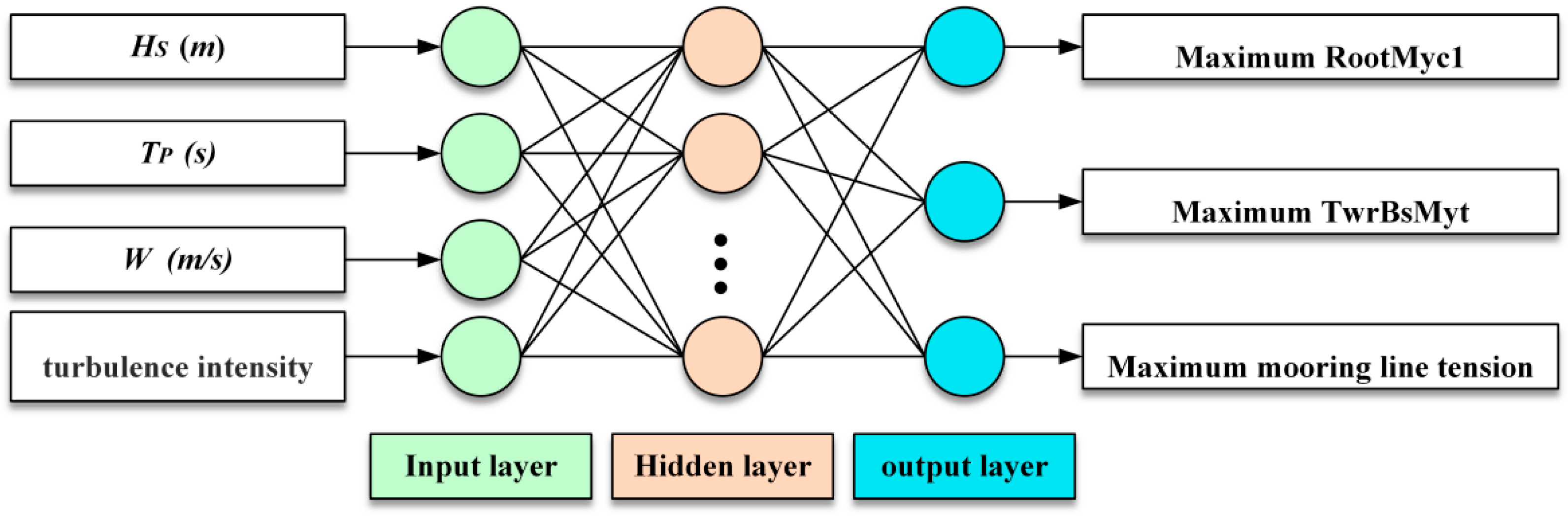
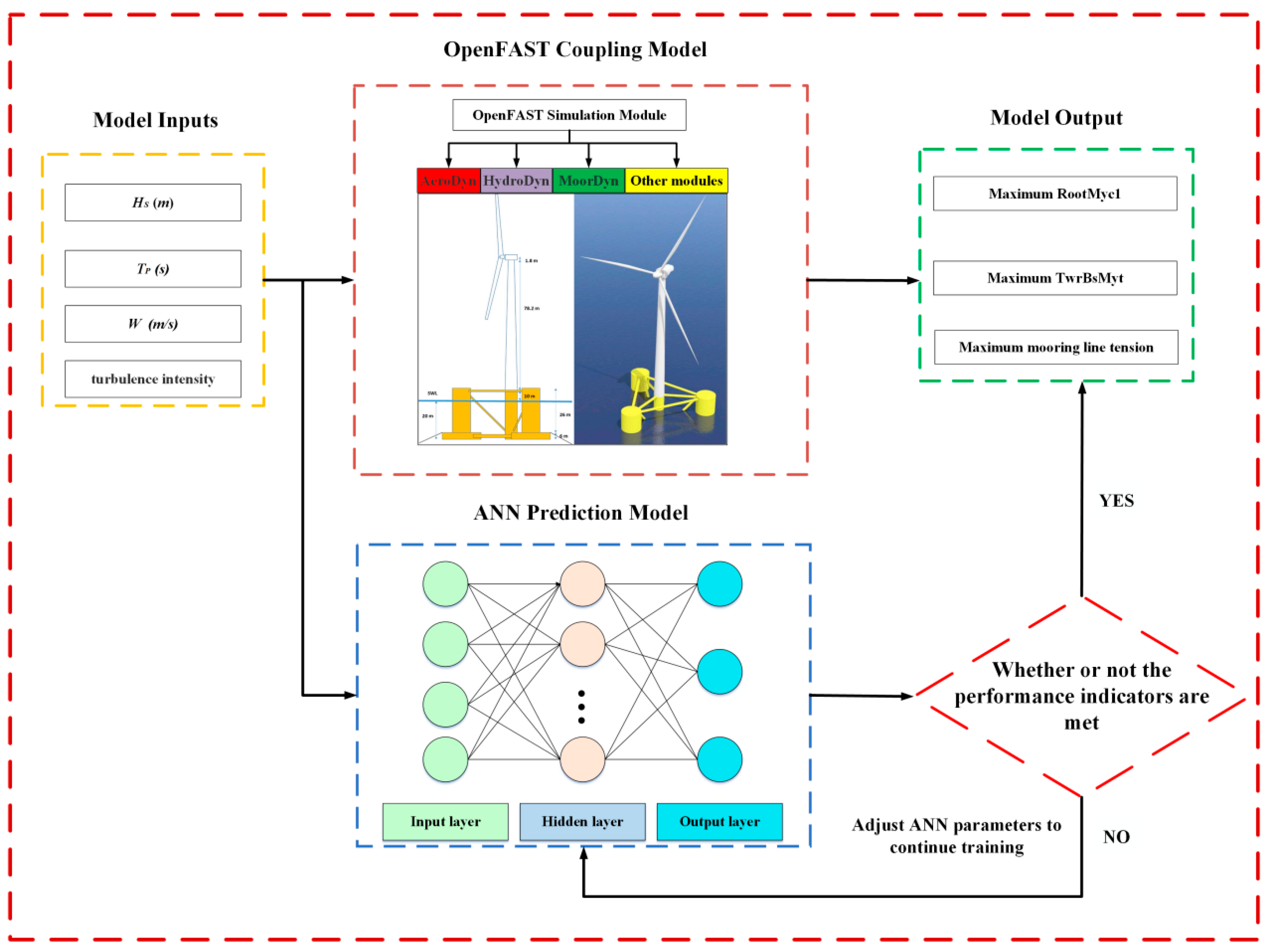
4. Artificial Neural Network Predictive Modeling
4.1. Artificial Neural Network Framework
4.2. Training of Neural Networks
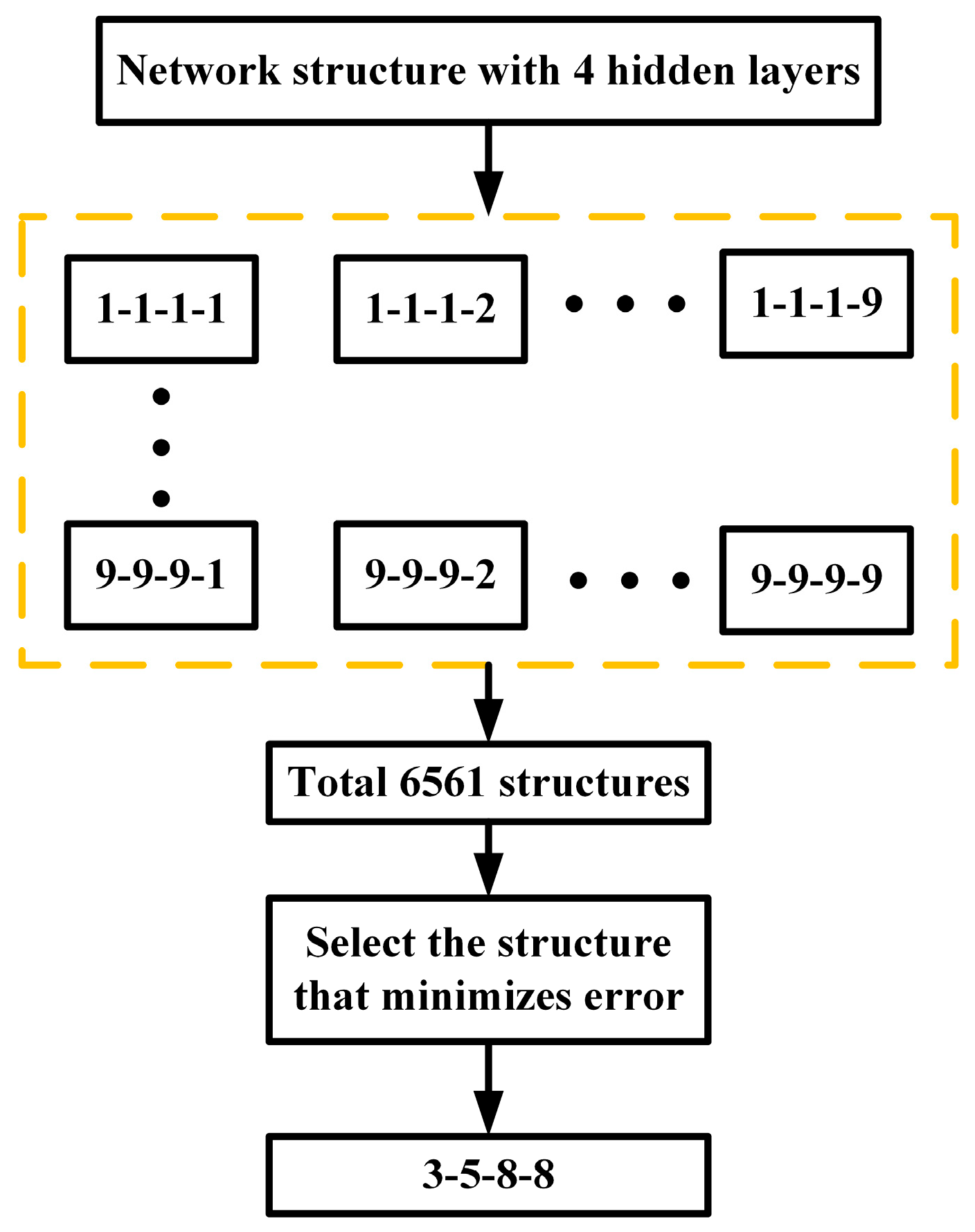
4.2.1. Hidden Layer Network Structure
4.2.2. Comparison of Training Algorithms
5. Results and Discussion
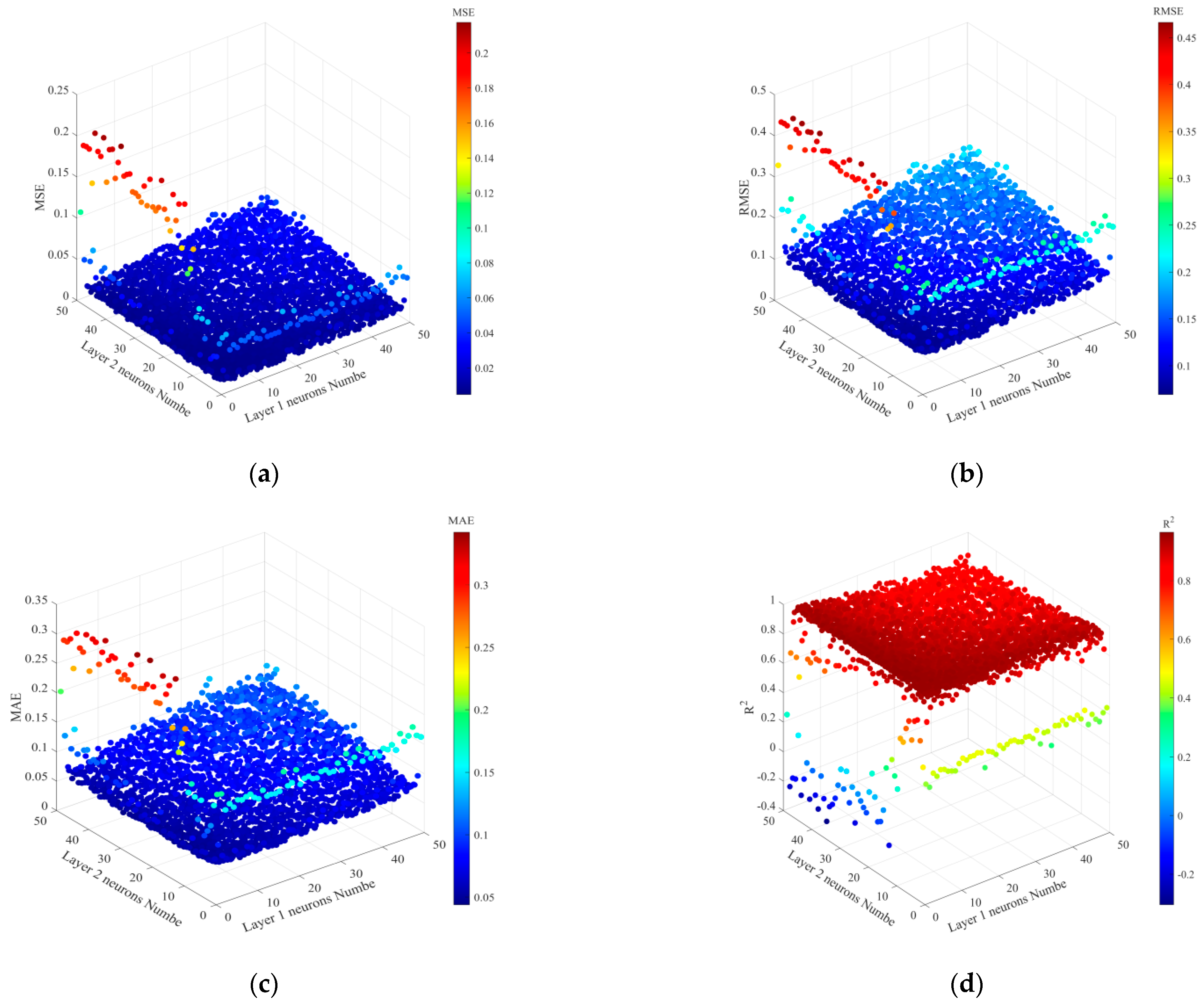
5.1. Sensitivity Analysis
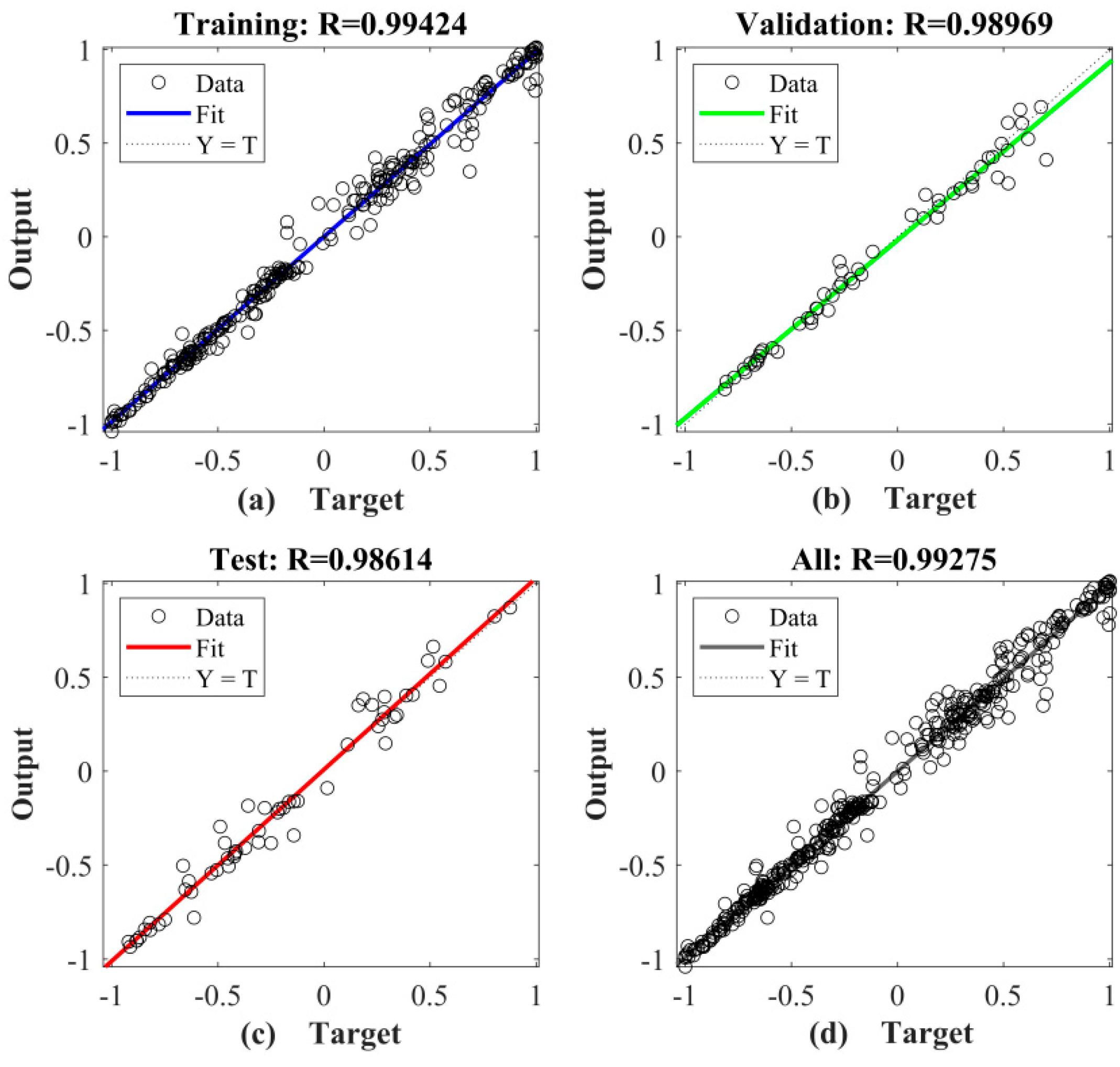
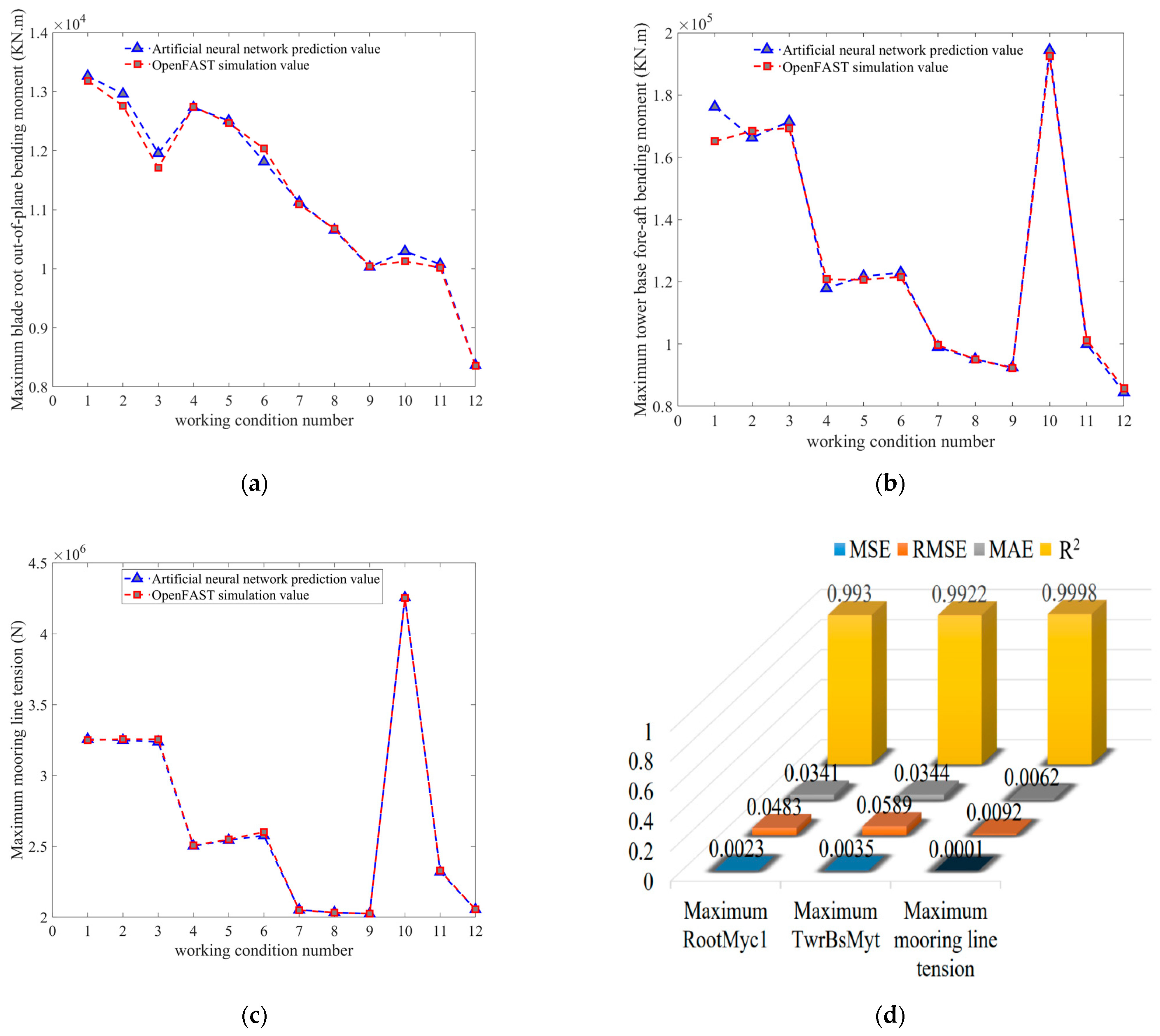
5.2. Reliability of Predictive Models
6. Summary and Conclusions
- (1)
- Application of IFORM to assess response for data-selected design cases of the TRL + National Research Project can significantly reduce simulation time.
- (2)
- Neuron sensitivity analysis has shown that deep neural networks with double hidden layers yield better predictions, compared to shallow neural networks with single hidden layers, however further increases in neuron numbers lead to a gradual decrease in model performance.
- (3)
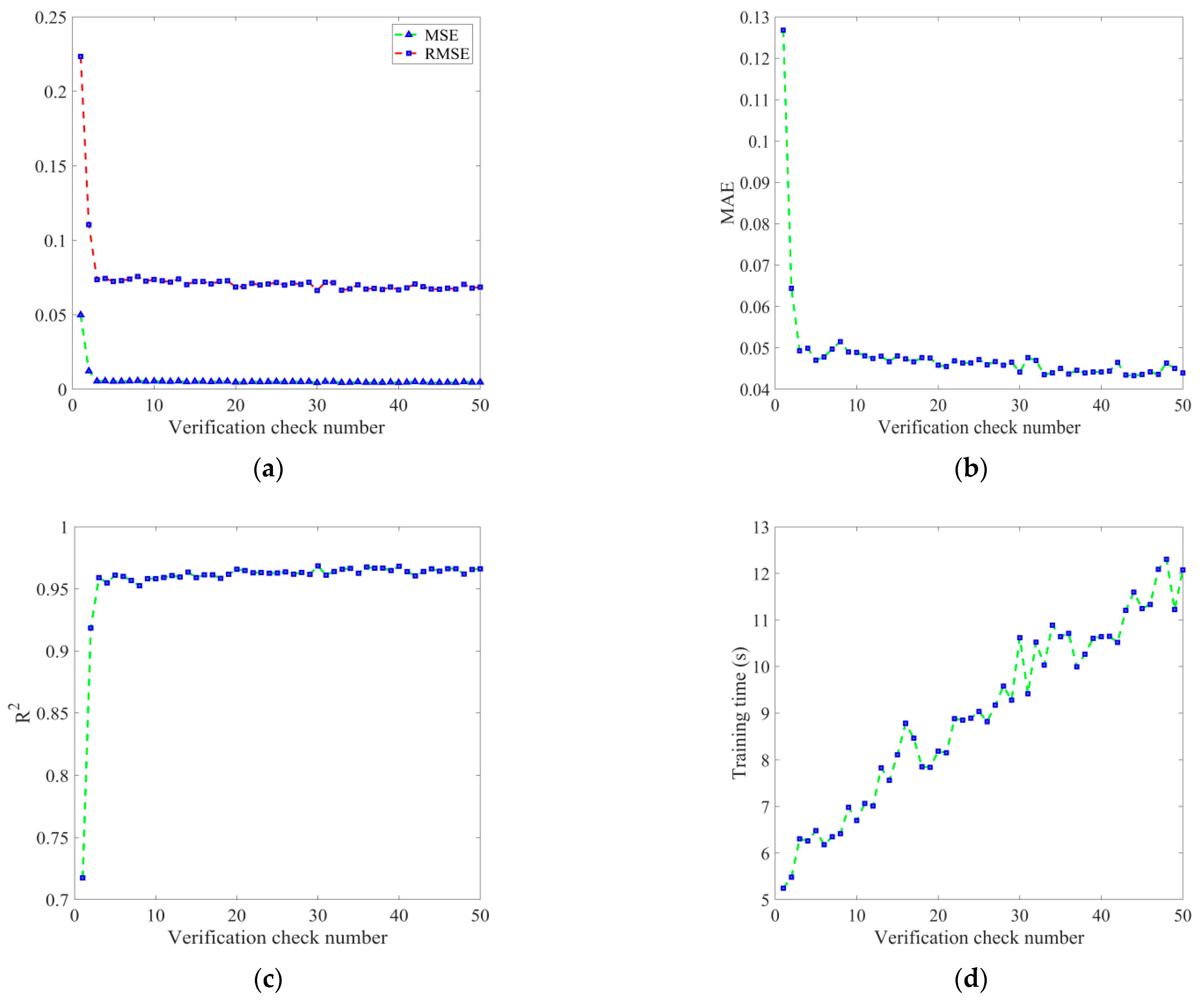
- The sensitivity analysis of the number of validations shows that setting too few validations when training the neural network will lead to larger MSE, RMSE, MAE, and smaller R2, which indicates that the accuracy of the model is not high. However, too many verifications will take more time, and the improvement in accuracy is almost negligible.
- (4)
- Reliability verification has shown that a reasonable neural network, as well as appropriate parameter settings of the neural network given in situ wind conditions, may become a useful design strategy.
- (5)
- Blade element momentum theory, applied to key FOWT parts, wave kinematics, and hydrodynamics calculations, forms a solid mechanical model. Finally, given all the above-mentioned steps, an accurate extreme response statistic for FOWT key parts was obtained.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, P.; Jia, C.; Ng, C.; Hu, Z. Application of SADA method on full-scale measurement data for dynamic responses prediction of Hywind floating wind turbines. Ocean Eng. 2021, 239, 109814. [Google Scholar] [CrossRef]
- Wang, K.; Chu, Y.; Huang, S.; Liu, Y. Preliminary design and dynamic analysis of constant tension mooring system on a 15 MW semi-submersible wind turbine for extreme conditions in shallow water. Ocean Eng. 2023, 283, 115089. [Google Scholar] [CrossRef]
- Luo, Y.; Qian, F.; Sun, H.; Wang, X.; Chen, A.; Zuo, L. Rigid-flexible coupling multi-body dynamics modeling of a semi-submersible floating offshore wind turbine. Ocean Eng. 2023, 281, 114648. [Google Scholar] [CrossRef]
- Xu, B.; Kang, H.; Shen, X.; Li, Z.; Cai, X.; Hu, Z. Aerodynamic analysis of a downwind offshore floating wind turbine with rotor uptilt angles in platform pitching motion. Ocean Eng. 2023, 281, 114951. [Google Scholar] [CrossRef]
- Chen, L.; Basu, B.; Nielsen, S.R.K. A coupled finite difference mooring dynamics model for floating offshore wind turbine analysis. Ocean Eng. 2018, 162, 304–315. [Google Scholar] [CrossRef]
- Stetco, A.; Dinmohammadi, F.; Zhao, X.; Robu, V.; Flynn, D.; Barnes, M.; Keane, J.; Nenadic, G. Machine learning methods for wind turbine condition monitoring: A review. Renew. Energy 2019, 133, 620–635. [Google Scholar] [CrossRef]
- International Electrotechnical Commission. IEC 61400-3 Wind Turbines Part 3: Design Requirements for Offshore Wind Turbines; International Electrotechnical Commission: Geneva, Switzerland, 2009. [Google Scholar]
- Soares, C.G.; Moan, T. Model uncertainty in the long-term distribution of wave-induced bending moments for fatigue design of ship structures. Mar. Struct. 1991, 4, 295–315. [Google Scholar] [CrossRef]
- Teixeira, A.P.; Soares, C.G. Reliability analysis of a tanker subjected to combined sea states. Probabilistic Eng. Mech. 2009, 24, 493–503. [Google Scholar] [CrossRef]
- Karmakar, D.; Bagbanci, H.; Soares, C.G. Long-Term Extreme Load Prediction of Spar and Semisubmersible Floating Wind Turbines Using the Environmental Contour Method. J. Offshore Mech. Arct. Eng. 2016, 138, 021601. [Google Scholar] [CrossRef]
- Soares, C.G.; Garbatov, Y.; Teixeira, A. Methods of structural reliability applied to design and maintenance planning of ship hulls and floating platforms. In Safety and Reliability of Industrial Products, Systems and Structures; Soares, C.G., Ed.; Taylor & Francis Group: London, UK, 2010; pp. 191–206. [Google Scholar]
- Low, Y.M.; Langley, R.S. A hybrid time/frequency domain approach for efficient coupled analysis of vessel/mooring/riser dynamics. Ocean Eng. 2008, 35, 433–446. [Google Scholar] [CrossRef]
- Du, J.; Wang, H.; Wang, S.; Song, X.; Wang, J.; Chang, A. Fatigue damage assessment of mooring lines under the effect of wave climate change and marine corrosion. Ocean Eng. 2020, 206, 107303. [Google Scholar] [CrossRef]
- Low, Y.M.; Cheung, S.H. On the long-term fatigue assessment of mooring and riser systems. Ocean Eng. 2012, 53, 60–71. [Google Scholar] [CrossRef]
- Chao, S.; Wei, S.; Vahid, J. A real-time hybrid simulation framework for floating offshore wind turbines. Ocean Eng. 2022, 265, 112529. [Google Scholar]
- Chen, M.; Li, C.B.; Han, Z.; Lee, J.-B. A simulation technique for monitoring the real-time stress responses of various mooring configurations for offshore floating wind turbines. Ocean Eng. 2023, 278, 114366. [Google Scholar] [CrossRef]
- Jiang, C.; Cao, F.; Li, D.; Wei, Z.; Shi, H. A double-objective prediction and optimization method for buoys performance based on the artificial neural network. Ocean Eng. 2023, 282, 114969. [Google Scholar] [CrossRef]
- Wang, L.; Zuo, S.; Song, Y.D.; Zhou, Z. Variable Torque Control of Offshore Wind Turbine on Spar Floating Platform Using Advanced RBF Neural Network. Abstr. Appl. Anal. 2014, 2014, 903493. [Google Scholar] [CrossRef]
- Ahmad, I.; M′zouhi, F.; Aboutalebi, P.; Garrido, I.; Gsrrido, A.J. Fuzzy logic control of an artificial neural network-based floating offshore wind turbine model integrated with four oscillating water columns. Ocean Eng. 2023, 269, 113578. [Google Scholar] [CrossRef]
- Zifei, X.; Musa, B.; Yang, Y.; Xinyu, W.; Jin, W.; Nduka, E.; Chun, L. Multisensory collaborative damage diagnosis of a 10 MW floating offshore wind turbine tendons using multi-scale convolutional neural network with attention mechanism. Renew. Energy 2022, 199, 21–34. [Google Scholar]
- Bjørni, F.A.; Lien, S.; Midtgarden, T.A.; Kulia, G.; Verma, A.; Jiang, Z. Prediction of dynamic mooring responses of a floating wind turbine using an artificial neural network. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1201, 012023. [Google Scholar] [CrossRef]
- Bassam, A.M.; Phillips, A.B.; Turnock, S.R.; Wilson, P.A. Artificial neural network based prediction of ship speed under operating conditions for operational optimization. Ocean Eng. 2023, 278, 114613. [Google Scholar] [CrossRef]
- Ehrich, S.; Schwarz, C.M.; Rahimi, H.; Stoevesandt, B.; Peinke, J. Comparison of the blade element momentum theory with computational fluid dynamics for wind turbine simulations in turbulent inflow. Appl. Sci. 2018, 8, 2513. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Hayman, G.; Jonkman, B.; Damiani, R.; Murray, R. AeroDyn v15 User’s Guide and Theory Manual; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2015; p. 46. [Google Scholar]
- Moriarty, P.J.; Hansen, A.C. AeroDyn Theory Manual. National Renewable Energy Laboratory: Golden, CO, USA, 2005. [Google Scholar]
- Hansen, M. Aerodynamics of Wind Turbines; Routledge: London, UK, 2015. [Google Scholar]
- Wood, D. Small wind turbines. In Advances in Wind Energy Conversion Technology; Springer: Berlin/Heidelberg, Germany, 2011; pp. 195–211. [Google Scholar]
- Tian, W.; Wang, Y.; Shi, W.; Michailides, C.; Wan, L.; Chen, M. Numerical study of hydrodynamic responses for a combined concept of semisubmersible wind turbine and different layouts of a wave energy converter. Ocean Eng. 2023, 272, 113824. [Google Scholar] [CrossRef]
- Meng, Q.; Hua, X.; Chen, C.; Zhou, S.; Liu, F.; Chen, Z. Analytical study on the aerodynamic and hydrodynamic damping of the platform in an operating spar-type floating offshore wind turbine. Renew. Energy 2022, 198, 772–788. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Robertson, A.; Hayman, G.J. HydroDyn User’s Guide and Theory Manual; National Renewable Energy Laboratory: Oak Ridge, TN, USA, 2014. [Google Scholar]
- Jiang, X.; Gan, J.; Teng, S. Simulation of Anchor Chain based on Lumped Mass Method. Theor. Appl. Mech. Lett. 2023, 13, 100460. [Google Scholar] [CrossRef]
- Hall, M. MoorDyn User’s Guide; Department of Mechanical Engineering, University of Maine: Orono, ME, USA, 2015; p. 15. [Google Scholar]
- Hall, M.; Goupee, A. Validation of a lumped-mass mooring line model with DeepCwind semisubmersible model test data. Ocean Eng. 2015, 104, 590–603. [Google Scholar] [CrossRef]
- Barrera, C.; Losada, I.J.; Guanche, R.; Johanning, L. The influence of wave parameter definition over floating wind platform mooring systems under severe sea states. Ocean Eng. 2019, 172, 105–126. [Google Scholar] [CrossRef]
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4. In Scitech Connect Definition of the Floating System for Phase IV of OC3; National Renewable Energy Lab.(NREL): Golden, CO, USA, 2014. [Google Scholar]
- Liu, Y.; Yoshida, S.; Yamamoto, H.; Toyofuku, A.; He, G.; Yang, S. Response Characteristics of the DeepCwind Floating Wind Turbine Moored by a Single-Point Mooring System. Appl. Sci. 2018, 8, 2306. [Google Scholar] [CrossRef]
- Iturrioz, A.; del Jesus, F.; Guanche, R.; Acevedo, A.; Chiri, H.; Abascal, A.; García, A.; Espejo, A.; Losada, I.; Marina, D. Metocean characterization of BiMEP for WEC design. In Proceedings of the Twelfth European Wave and Tidal Energy Conference, Cork, UK, 27 August–1 September 2017; pp. 754–759. [Google Scholar]
- Met-Ocean Conditions for the BIMEP Marine Renewable Energy Test Site. Available online: https://marine.copernicus.eu/services/use-cases/met-ocean-conditions-bimep-marine-renewable-energy-test-site (accessed on 28 April 2023).
- Haver, S.; Winterstein, S.R. Environmental Contour Lines: A Method for Estimating Long Term Extremes by a Short Term Analysis. Trans.-Soc. Nav. Archit. Mar. Eng. 2008, 116. [Google Scholar]
- Raed, K.; Teixeira, A.P.; Soares, C.G. Uncertainty assessment for the extreme hydrodynamic responses of a wind turbine semi-submersible platform using different environmental contour approaches. Ocean Eng. 2020, 195, 106719. [Google Scholar] [CrossRef]
- DNV-OS-J101–Design of Offshore Wind Turbine Structures; DNV GL: Høvik, Norway, 2014.
- Darin, M.; Sandi, B.Š.; Ivan, L.; Zlatan, C. Prediction of main particulars of container ships using artificial intelligence algorithms. Ocean Eng. 2022, 265, 112571. [Google Scholar]
- International Electrotechnical Commission. Wind Turbines-Part 1: Design Requirements; IEC 61400-1-Ed. 3.0; International Electrotechnical Commission: Geneva, Switzerland, 2005. [Google Scholar]
- NREL. OpenFAST Documentation; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2023. [Google Scholar]
- Jonkman, B. Turbsim User’s Guide v2. 00.00; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2014. [Google Scholar]
- Li, C.B.; Choung, J.; Noh, M.-H. Wide-banded fatigue damage evaluation of Catenary mooring lines using various Artificial Neural Networks models. Mar. Struct. 2018, 60, 186–200. [Google Scholar] [CrossRef]
- Ahmadi, F.; Ranji, A.R.; Nowruzi, H. Ultimate strength prediction of corroded plates with center-longitudinal crack using FEM and ANN. Ocean Eng. 2020, 206, 107281. [Google Scholar] [CrossRef]
- Kanghyeok, L.; Minwoong, C.; Seungjun, K.; Hyoung, S.D. Damage detection of catenary mooring line based on recurrent neural networks. Ocean Eng. 2021, 227, 108898. [Google Scholar]
- Gorostidi, N.; Nava, V.; Aristondo, A.; Pardo, D. Predictive Maintenance of Floating Offshore Wind Turbine Mooring Lines using Deep Neural Networks. J. Phys. Conf. Ser. 2022, 2257, 012008. [Google Scholar] [CrossRef]
- Brester, C.; Kallio-Myers, V.; Lindfors, A.V.; Kolehmainen, M.; Niska, H. Evaluating neural network models in site-specific solar PV forecasting using numerical weather prediction data and weather observations. Renew. Energy 2023, 207, 266–274. [Google Scholar] [CrossRef]
- Han, Y.; Liao, Y.; Ma, X.; Guo, X.; Li, C.; Liu, X. Analysis and prediction of the penetration of renewable energy in power systems using artificial neural network. Renew. Energy 2023, 215, 118914. [Google Scholar] [CrossRef]
- R2019b, M. MATLAB User Manual; The MathWorks, Inc.: Natick, MA, USA, 2019.
- Heny, P.; Perdana, W.A.; Restu, A.R.; Susi, S.; Kanti, R.L.; Yuni, F.; Agustiena, M.; Riyana, R.I. Sigmoid Activation Function in Selecting the Best Model of Artificial Neural Networks. J. Phys. Conf. Ser. 2020, 1471, 012010. [Google Scholar]
- Soyer, M.A.; Tüzün, N.; Karakaş, Ö.; Berto, F. An investigation of artificial neural network structure and its effects on the estimation of the low-cycle fatigue parameters of various steels. Fatigue Fract. Eng. Mater. Struct. 2023, 46, 2929–2948. [Google Scholar] [CrossRef]
- Li, Z.; Li, Y. A comparative study on the prediction of the BP artificial neural network model and the ARIMA model in the incidence of AIDS. BMC Med. Inform. Decis. Mak. 2020, 20, 143. [Google Scholar] [CrossRef]
- Cheng, K.; Tao, F.; Zhan, Y.; Li, M.; Li, K. Hierarchical attributes learning for pedestrian re-identification via parallel stochastic gradient descent combined with momentum correction and adaptive learning rate. Neural Comput. Appl. 2019, 32, 5695–5712. [Google Scholar] [CrossRef]
- Banibrata, P.; Bhaskar, K. Heart disease prediction using scaled conjugate gradient backpropagation of artificial neural network. Soft Comput. 2022, 27, 6687–6702. [Google Scholar]
- Kayri, M.; Pakdemirli, M. Predictive Abilities of Bayesian Regularization and Levenberg–Marquardt Algorithms in Artificial Neural Networks: A Comparative Empirical Study on Social Data. Math. Comput. Appl. 2016, 21, 20. [Google Scholar] [CrossRef]
- Kazemi, P.; Renka, R.J. A Levenberg–Marquardt method based on Sobolev gradients. Nonlinear Anal. 2012, 75, 6170–6179. [Google Scholar] [CrossRef]


| Platform Properties | Value |
|---|---|
| Platform draft | 20.0 m |
| Centerline spacing between offset columns | 50.0 m |
| Length of upper columns | 26.0 m |
| Length of base columns | 6.0 m |
| Diameter of main column | 6.5 m |
| Diameter of offset (upper) columns | 12.0 m |
| Diameter of base columns | 24.0 m |
| Diameter of pontoons and cross braces | 1.6 m |
| Turbulence Intensity (IEC) | Working Condition Number | Dataset Number | |||
|---|---|---|---|---|---|
| 8.1–8.81 | 6, 12, 24 | 7.93–11.93 | 0.16, 0.14, 0.12 | 1–126 | 1 |
| 8.81–9.50 | 6, 12, 24 | 11.93–16.08 | 0.16, 0.14, 0.12 | 127–243 | 2 |
| 9.50–10.30 | 6, 12, 24 | 16.08–25.69 | 0.16, 0.14, 0.12 | 244–387 | 3 |
| Number of Hidden Layer Layers (Number of Neurons Per Layer) | ||||
|---|---|---|---|---|
| Output Response | 1(9) | 2(4–9) | 3(3–6–9) | 4(3–5–8–8) |
| MSE | MSE | MSE | MSE | |
| Maximum RootMyc1 | 0.0128 | 0.0116 | 0.0127 | 0.0132 |
| Maximum TwrBsMyt | 0.0023 | 0.0020 | 0.0019 | 0.0022 |
| Maximum mooring line tension | 0.0012 | 0.0010 | 0.0010 | 0.0012 |
| time consuming/s | 4.37 | 5.89 | 7.45 | 8.72 |
| Algorithm | |||||
|---|---|---|---|---|---|
| Output Response | Gradient Descent | Gradient Descent with Adaptive Learning Rate | Scaled Conjugate Gradient | Bayesian Regularization | Levenberg–Marquardt |
| MSE | MSE | MSE | MSE | MSE | |
| Maximum RootMyc1 | 0.1295 | 0.1006 | 0.0433 | 0.0123 | 0.0119 |
| Maximum TwrBsMyt | 0.183 | 0.0794 | 0.0208 | 0.0024 | 0.0018 |
| Maximum mooring line tension | 0.2078 | 0.0823 | 0.0215 | 0.0012 | 0.0009 |
| Time consuming/s | 26.94 | 8.67 | 8.34 | 10.74 | 7.96 |
| Performance Indicators | ||||
|---|---|---|---|---|
| Network Structure | MSE | RMSE | MAE | R2 |
| 1(9) | 0.0044 | 0.0664 | 0.0443 | 0.9680 |
| 2(3–15) | 0.0031 | 0.0554 | 0.0355 | 0.9819 |
| Change percentage (%) | 29.55 | 16.57 | 19.86 | 1.44 |
| Turbulence Intensity (IEC) | Working Condition Number | Dataset Number | |||
|---|---|---|---|---|---|
| 8.31 | 6 | 9.80 | 0.16 | 1 | 1 |
| 8.31 | 6 | 9.80 | 0.14 | 2 | |
| 8.31 | 6 | 9.80 | 0.12 | 3 | |
| 8.58 | 12 | 10.70 | 0.16 | 4 | 2 |
| 8.58 | 12 | 10.70 | 0.14 | 5 | |
| 8.58 | 12 | 10.70 | 0.12 | 6 | |
| 9.39 | 24 | 14.99 | 0.16 | 7 | 3 |
| 9.39 | 24 | 14.99 | 0.14 | 8 | |
| 9.39 | 24 | 14.99 | 0.12 | 9 | |
| 10.17 | 6 | 24.2 | 0.16 | 10 | 4 |
| 10.17 | 12 | 24.2 | 0.14 | 11 | |
| 10.17 | 24 | 24.2 | 0.12 | 12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Gaidai, O.; Wang, F.; Xu, X.; Zhang, T.; Deng, H. Artificial Neural Network-Based Prediction of the Extreme Response of Floating Offshore Wind Turbines under Operating Conditions. J. Mar. Sci. Eng. 2023, 11, 1807. https://doi.org/10.3390/jmse11091807
Wang K, Gaidai O, Wang F, Xu X, Zhang T, Deng H. Artificial Neural Network-Based Prediction of the Extreme Response of Floating Offshore Wind Turbines under Operating Conditions. Journal of Marine Science and Engineering. 2023; 11(9):1807. https://doi.org/10.3390/jmse11091807
Chicago/Turabian StyleWang, Kelin, Oleg Gaidai, Fang Wang, Xiaosen Xu, Tao Zhang, and Hang Deng. 2023. "Artificial Neural Network-Based Prediction of the Extreme Response of Floating Offshore Wind Turbines under Operating Conditions" Journal of Marine Science and Engineering 11, no. 9: 1807. https://doi.org/10.3390/jmse11091807