
Identification of Multi-Innovation Stochastic Gradients with Maximum Likelihood Algorithm Based on Ship Maneuverability and Wave Peak Models



Abstract
1. Introduction
- The ship maneuvering response model and wave disturbance model are converted to an ARMAX model based on the idea of Euler discretization for ship K-T parameters and ocean wave frequency identification.
- Aiming at the ship–wave discrete-time ARMAX model, a ship–wave parameter identification method based on MI-SG algorithms is proposed.
- To improve the identification accuracy by introducing the theory of maximum likelihood, a ML-MI-SG algorithm is proposed to solve the problem.
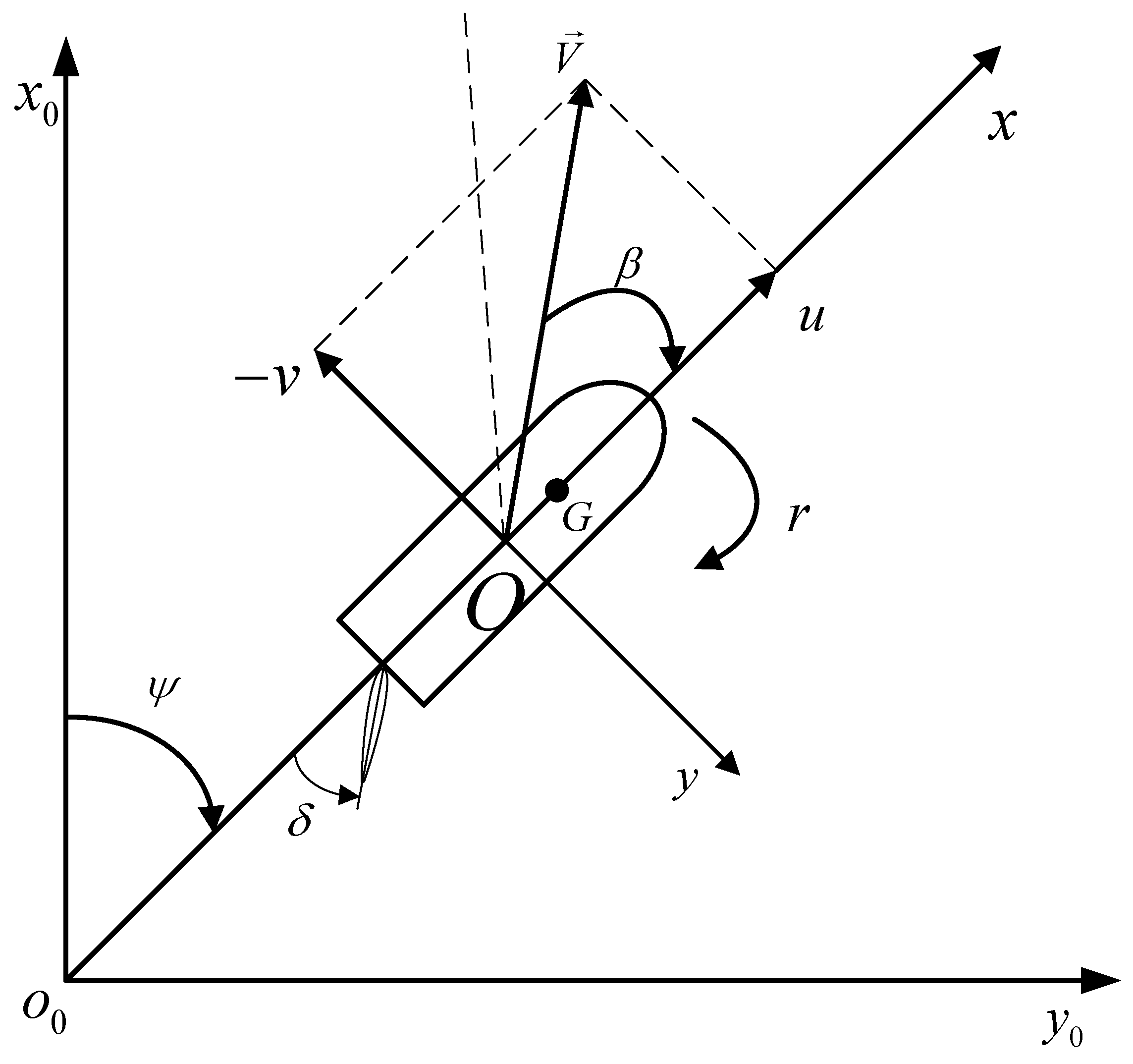
2. Ship–Wave Mathematical Model
3. The Multi-Innovation Stochastic Gradient Algorithm
4. The Maximum Likelihood-Based Multi-Innovation Stochastic Gradient Algorithm
5. Wave Peak Frequency and Ship Motion Parameter Calculation
6. Simulation Results and Analysis
6.1. Identification Input Design
6.2. Parameter Identification Experiments
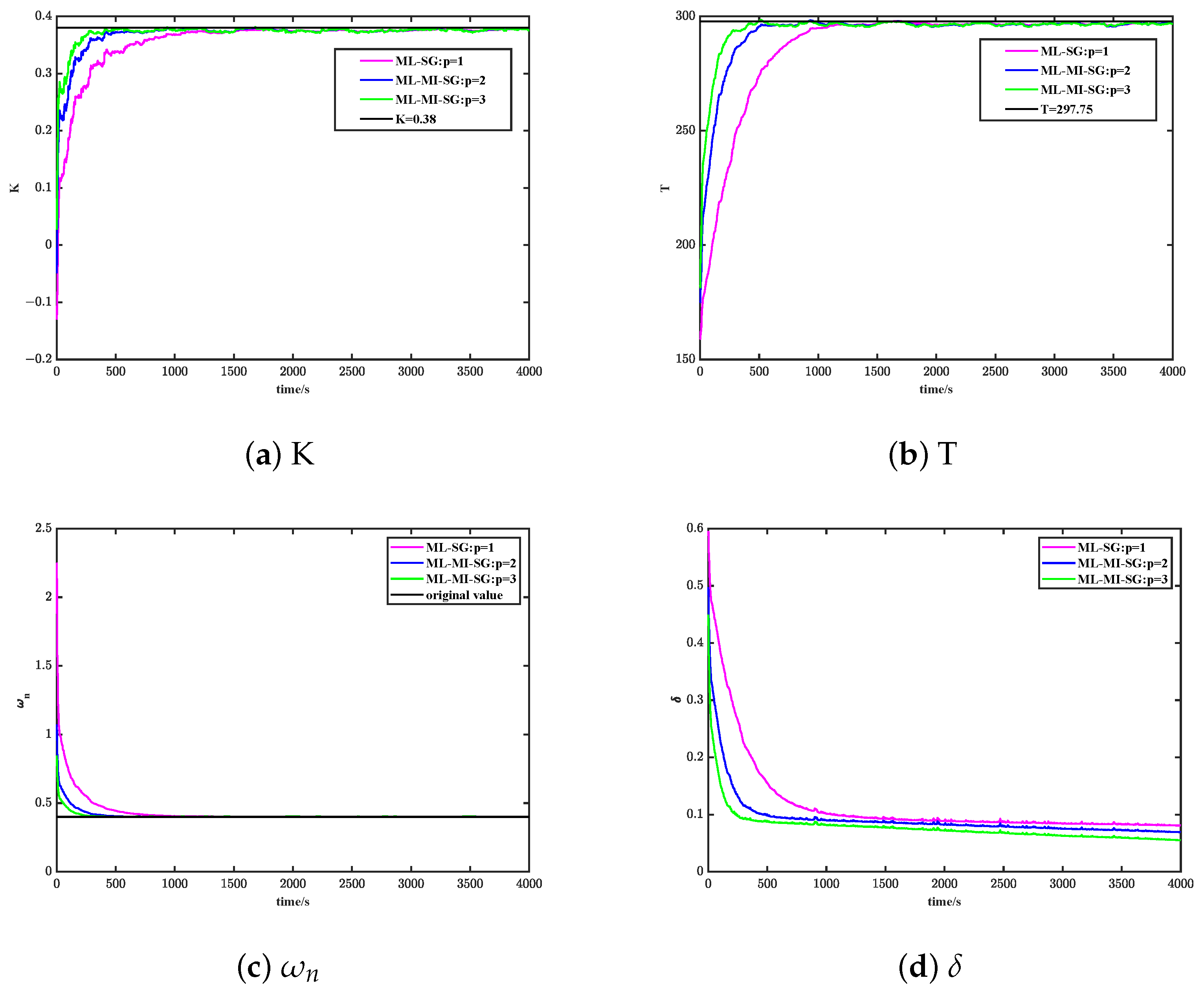
- The estimation errors of both the MI-SG algorithm and the ML-MI-SG algorithm decrease over time. Please refer to Figure 7. The ML-MI-SG algorithm demonstrates superior convergence speed and identification accuracy when compared with the MI-SG algorithm, enabling it to more effectively identify and obtain the parameters of the ship–wave model, as depicted in Figure 7.
- In the case of the same innovation length p, the convergence speed and recognition accuracy of the ML-MI-SG algorithm are better than that of the MI-SG algorithm; by means of the control variable method, comparing the ML-MI-SG algorithms with different innovation lengths p in the case of the other states being the same, the convergence speed and the recognition accuracy are directly proportional to the change of the innovation length p, as illustrated by Table 3 and Table 4 and Figure 8.
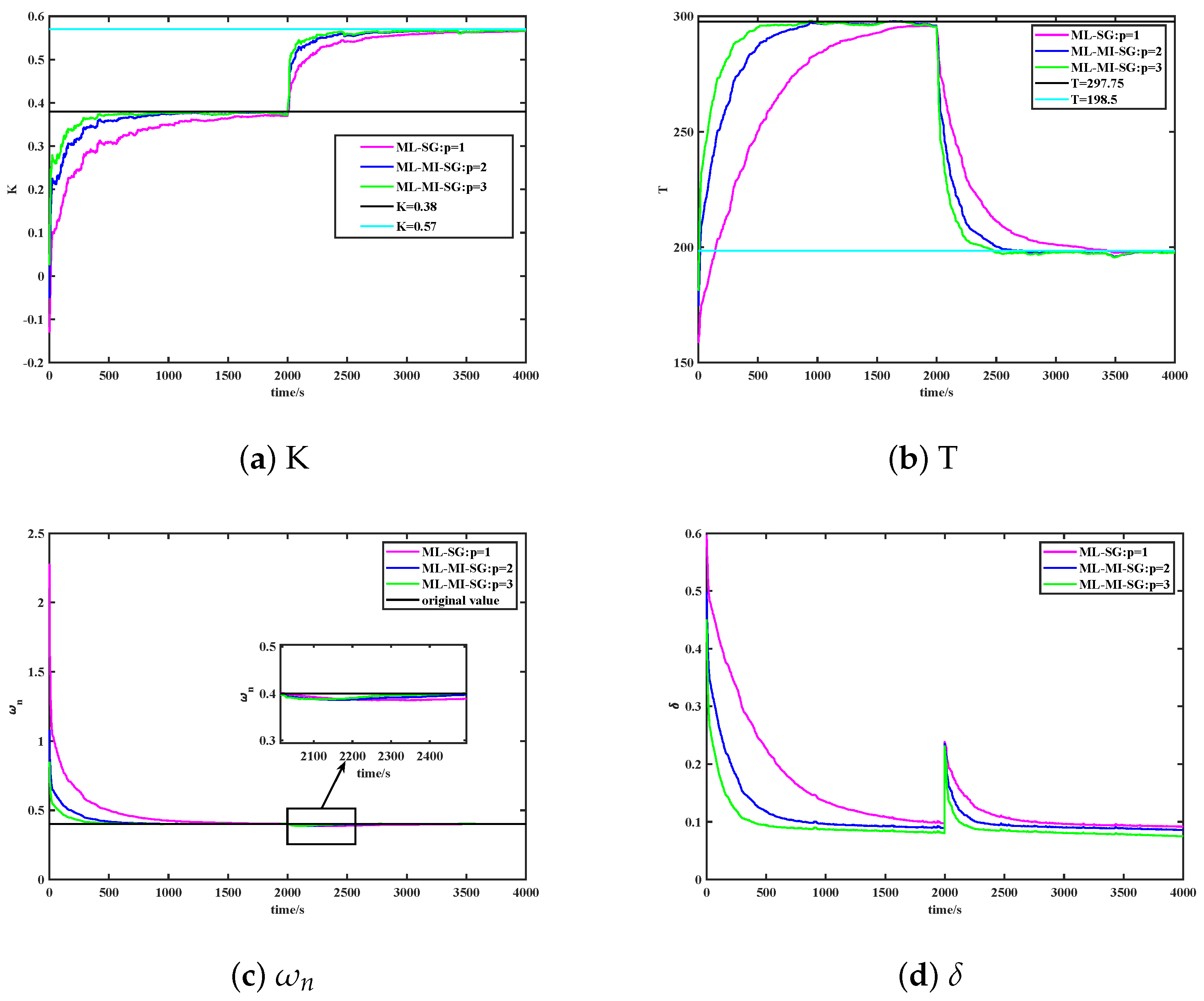
- For ship state changes, the ML-MI-SG algorithm is able to respond quickly to K and T parameter changes due to ship speed and load changes and accurately identify the new K and T parameters of the ship in a short period of time, showing excellent real-time performance, as depicted in Figure 9.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| K | ML-MI-SG | T | ML-MI-SG | ||||
|---|---|---|---|---|---|---|---|
| time/s | p = 1 | p = 2 | p = 3 | time/s | p = 1 | p = 2 | p = 3 |
| 100 | 0.18729 | 0.27794 | 0.32097 | 100 | 199.25624 | 244.77772 | 268.22143 |
| 200 | 0.25862 | 0.32483 | 0.35365 | 200 | 225.48425 | 271.49848 | 287.99145 |
| 500 | 0.33842 | 0.37251 | 0.37825 | 500 | 274.01053 | 295.54320 | 295.77890 |
| 1000 | 0.36728 | 0.37637 | 0.37624 | 1000 | 294.89304 | 296.94850 | 296.48548 |
| 2000 | 0.37371 | 0.37306 | 0.37267 | 2000 | 296.40574 | 295.71300 | 295.67858 |
| 4000 | 0.37648 | 0.37602 | 0.37574 | 4000 | 296.91472 | 296.97271 | 296.99007 |
| true value | 0.38 | 0.38 | 0.38 | true value | 297.75 | 297.75 | 297.75 |
| ML-MI-SG | ML-MI-SG | ||||||
|---|---|---|---|---|---|---|---|
| time/s | p = 1 | p = 2 | p = 3 | time/s | p = 1 | p = 2 | p = 3 |
| 100 | 1.06125 | 0.62012 | 0.51603 | 100 | 0.38632 | 0.23137 | 0.15548 |
| 200 | 0.75940 | 0.50463 | 0.44432 | 200 | 0.29932 | 0.15322 | 0.10550 |
| 500 | 0.49931 | 0.41674 | 0.40427 | 500 | 0.15572 | 0.09959 | 0.08865 |
| 1000 | 0.42119 | 0.40333 | 0.40288 | 1000 | 0.10179 | 0.08994 | 0.08179 |
| 2000 | 0.40430 | 0.40423 | 0.40258 | 2000 | 0.08874 | 0.08240 | 0.07207 |
| 4000 | 0.40244 | 0.40229 | 0.40118 | 4000 | 0.08081 | 0.06918 | 0.05526 |
| true value | 0.4 | 0.4 | 0.4 | ||||
7. Conclusions
- Typically, traditional methods require a large amount of test data to produce reliable parameter estimation results, while the system identification method can achieve reliable parameter estimation with less test data; secondly, the data error is about 5%, which effectively reduces the data error and improves the accuracy of parameter estimation.
- Compared with the MI-SG algorithm, the ML-MI-SG algorithm exhibits higher accuracy in parameter identification, with an improvement of about 10%. The ML-MI-SG algorithm combines the key ideas of maximum likelihood and multi-innovation theory, and further improves the accuracy of parameter identification through the introduction of maximum likelihood estimation methods.
- Additionally, the ML-MI-SG algorithm converges much faster than the MI-SG algorithm. The discrimination curve is also smoother with a smaller fluctuation range, resulting in better parameter acquisition performance for designing controllers and observers and other related tasks.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Handayani, M.P.; Melia, P.; Kim, H.; Lee, S.; Lee, J. Navigating Energy Efficiency: A Multifaceted Interpretability of Fuel Oil Consumption Prediction in Cargo Container Vessel Considering the Operational and Environmental Factors. J. Mar. Sci. Eng. 2023, 11, 2165. [Google Scholar] [CrossRef]
- Niu, Y.; Zhu, F.; Wei, M.; Du, Y.; Zhai, P. A Multi-Ship Collision Avoidance Algorithm Using Data-Driven Multi-Agent Deep Reinforcement Learning. J. Mar. Sci. Eng. 2023, 11, 2101. [Google Scholar] [CrossRef]
- Ouyang, Z.; Zou, Z.; Zou, L. Nonparametric Modeling and Control of Ship Steering Motion Based on Local Gaussian Process Regression. J. Mar. Sci. Eng. 2023, 11, 2161. [Google Scholar] [CrossRef]
- Shi, X.; Chen, P.; Chen, L. An Integrated Method for Ship Heading Control Using Motion Model Prediction and Fractional Order Proportion Integration Differentiation Controller. J. Mar. Sci. Eng. 2023, 11, 2294. [Google Scholar] [CrossRef]
- Grlj, C.; Degiuli, N.; Tuković, Ž.; Farkas, A.; Martić, I. The effect of loading conditions and ship speed on the wind and air resistance of a containership. Ocean Eng. 2023, 273, 113991. [Google Scholar] [CrossRef]
- Himaya, A.; Sano, M.; Suzuki, T.; Shirai, M.; Hirata, N.; Matsuda, A.; Yasukawa, H. Effect of the loading conditions on the maneuverability of a container ship. Ocean Eng. 2022, 247, 109964. [Google Scholar] [CrossRef]
- Wall, A.; Thornhill, E.; Barber, H.; McTavish, S.; Lee, R. Experimental investigations into the effect of at-sea conditions on ship airwake characteristics. J. Wind Eng. Ind. Aerodyn. 2022, 223, 104933. [Google Scholar] [CrossRef]
- Park, D.; Lee, J.; Jung, Y.; Lee, J.; Kim, Y.; Gerhardt, F. Experimental and numerical studies on added resistance of ship in oblique sea conditions. Ocean Eng. 2019, 186, 106070. [Google Scholar] [CrossRef]
- Perrault, D. Probability of sea condition for ship strength, stability, and motion studies. J. Ship Res. 2021, 65, 1–14. [Google Scholar] [CrossRef]
- Wang, Z.; Soares, C.; Zou, Z. Optimal design of excitation signal for identification of nonlinear ship manoeuvring model. Ocean Eng. 2020, 196, 106778. [Google Scholar] [CrossRef]
- Sutulo, S.; Guedes Soares, C. Offline system identification of ship manoeuvring mathematical models with a global optimization algorithm. In Proceedings of the MARSIM 2015: International Conference on Ship Manoeuvrability and Maritime Simulation, Newcastle upon Tyne, UK, 8–11 September 2015; pp. 8–11. [Google Scholar]
- Skjetne, R.; Fossen, T.; Kokotović, P. Adaptive maneuvering, with experiments, for a model ship in a marine control laboratory. Automatica 2005, 41, 289–298. [Google Scholar] [CrossRef]
- Sutulo, S.; Guedes Soares, C. Mathematical models for simulation of manoeuvring performance of ships. In Marine Technology and Engineering; Taylor & Francis Group: London, UK, 2011; pp. 661–698. [Google Scholar]
- Xu, L. Parameter estimation for nonlinear functions related to system responses. Int. J. Control Autom. Syst. 2023, 21, 1780–1792. [Google Scholar] [CrossRef]
- Xu, L. Separable Newton recursive estimation method through system responses based on dynamically discrete measurements with increasing data length. Int. J. Control Autom. Syst. 2022, 20, 432–443. [Google Scholar] [CrossRef]
- Ding, F.; Chen, T. Combined parameter and output estimation of dual-rate systems using an auxiliary model. Automatica 2004, 40, 1739–1748. [Google Scholar] [CrossRef]
- Ding, F.; Chen, T. Parameter estimation of dual-rate stochastic systems by using an output error method. IEEE Trans. Autom. Control 2005, 50, 1436–1441. [Google Scholar] [CrossRef]
- Fan, Y.M.; Liu, X.M. Auxiliary model-based multi-innovation recursive identification algorithms for an input nonlinear controlled autoregressive moving average system with variable-gain nonlinearity. Int. J. Adapt. Control Signal Process. 2022, 36, 521–540. [Google Scholar] [CrossRef]
- Wang, J.; Ji, Y.; Zhang, X. Two-stage gradient-based iterative algorithms for the fractional-order nonlinear systems by using the hierarchical identification principle. Int. J. Adapt. Control Signal Process. 2022, 36, 1778–1796. [Google Scholar] [CrossRef]
- Sutulo, S.; Soares, C. An algorithm for offline identification of ship manoeuvring mathematical models from free-running tests. Ocean Eng. 2014, 79, 10–25. [Google Scholar] [CrossRef]
- Ueng, S.; Lin, D.; Liu, C. A ship motion simulation system. Virtual Real. 2008, 12, 65–76. [Google Scholar] [CrossRef]
- Lin, R.; Kuang, W. A fully nonlinear, dynamically consistent numerical model for solid-body ship motion. i. ship motion with fixed heading. Proc. R. Soc. A Math. Phys. Eng. Sci. 2011, 467, 911–927. [Google Scholar] [CrossRef]
- Francescutto, A.; Contento, G. Bifurcations in ship rolling: Experimental results and parameter identification technique. Ocean Eng. 1999, 26, 1095–1123. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, Y.; Wang, J.; Wang, H. Parameter identification and application of ship maneuvering model based on TO-CSA. Ocean Eng. 2022, 266, 113128. [Google Scholar] [CrossRef]
- Allotta, B.; Costanzi, R.; Pugi, L.; Ridolfi, A. Identification of the main hydrodynamic parameters of Typhoon AUV from a reduced experimental dataset. Ocean Eng. 2018, 147, 77–88. [Google Scholar] [CrossRef]
- Cardenas, P.; de Barros, E. Estimation of AUV hydrodynamic coefficients using analytical and system identification approaches. IEEE J. Ocean. Eng. 2019, 45, 1157–1176. [Google Scholar] [CrossRef]
- Luo, W.; Li, X. Measures to diminish the parameter drift in the modeling of ship manoeuvring using system identification. Appl. Ocean. Res. 2017, 67, 9–20. [Google Scholar] [CrossRef]
- Xue, Y.; Liu, Y.; Ji, C.; Xue, G. Hydrodynamic parameter identification for ship manoeuvring mathematical models using a Bayesian approach. Ocean Eng. 2020, 195, 106612. [Google Scholar] [CrossRef]
- Ding, F.; Ma, H.; Pan, J.; Yang, E.F. Hierarchical gradient- and least squares-based iterative algorithms for input nonlinear output-error systems using the key term separation. J. Frankl. Inst. 2021, 358, 5113–5135. [Google Scholar] [CrossRef]
- Hu, C.; Ji, Y.; Ma, C.Q. Joint two-stage multi-innovation recursive least squares parameter and fractional-order estimation algorithm for the fractional-order input nonlinear output-error autoregressive model. Int. J. Adapt. Control Signal Process. 2023, 37, 1650–1670. [Google Scholar] [CrossRef]
- Zhang, X.; Ding, F. Optimal adaptive filtering algorithm by using the fractional-order derivative. IEEE Signal Process. Lett. 2022, 29, 399–403. [Google Scholar] [CrossRef]
- Xu, L.; Ding, F.; Yang, E.F. Auxiliary model multiinnovation stochastic gradient parameter estimation methods for nonlinear sandwich systems. Int. J. Robust Nonlinear Control 2021, 31, 148–165. [Google Scholar] [CrossRef]
- Ji, Y.; Kang, Z. Three-stage forgetting factor stochastic gradient parameter methods for a class of nonlinear systems. Int. J. Robust Nonlinear Control 2021, 31, 971–987. [Google Scholar] [CrossRef]
- Zhu, M.; Hahn, A.; Wen, Y.; Bolles, A. Parameter identification of ship maneuvering models using recursive least square method based on support vector machines. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2017, 11, 23–29. [Google Scholar] [CrossRef]
- Iseki, T. Real-time estimation of the ship manoeuvrable range in wind. Ocean Eng. 2019, 190, 106396. [Google Scholar] [CrossRef]
- Nomoto, K.; Taguchi, K.; Honda, K.; Hirano, S. On the steering qualities of ships. J. Zosen Kiokai 1956, 1956, 75–82. [Google Scholar] [CrossRef] [PubMed]
- Ding, F.; Chen, T. Hierarchical least squares identification methods for multivariable systems. IEEE Trans. Autom. Control 2005, 50, 397–402. [Google Scholar] [CrossRef]
- Umenberger, J.; Wågberg, J.; Manchester, I.; Schön, T. Maximum likelihood identification of stable linear dynamical systems. Automatica 2018, 96, 280–292. [Google Scholar] [CrossRef]
- Soal, K.; Govers, Y.; Bienert, J.; Bekker, A. System identification and tracking using a statistical model and a Kalman filter. Mech. Syst. Signal Process. 2019, 133, 106127. [Google Scholar] [CrossRef]
- Polverini, M.; Cianfrani, A.; Listanti, M.; Siano, G.; Lavacca, F.; Campanile, C. Investigating on Black Holes in Segment Routing Networks: Identification and Detection. IEEE Trans. Netw. Serv. Manag. 2022, 20, 14–29. [Google Scholar] [CrossRef]
- Cardoso, V.; Poppi, R. Non-invasive identification of commercial green tea blends using NIR spectroscopy and support vector machine. Microchem. J. 2021, 164, 106052. [Google Scholar] [CrossRef]
- Wang, Z.; Zou, Z.; Soares, C. Identification of ship manoeuvring motion based on nu-support vector machine. Ocean Eng. 2019, 183, 270–281. [Google Scholar] [CrossRef]
- Zhao, B.; Zhang, X. An improved nonlinear innovation-based parameter identification algorithm for ship models. J. Navig. 2021, 74, 549–557. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, B.; Zhang, G. Improved parameter identification algorithm for ship model based on nonlinear innovation decorated by sigmoid function. Transp. Saf. Environ. 2021, 3, 114–122. [Google Scholar] [CrossRef]
- Song, C.; Zhang, X.; Zhang, G. Nonlinear innovation identification of ship response model via the hyperbolic tangent function. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 977–983. [Google Scholar] [CrossRef]
- Xie, S.; Chu, X.; Liu, C.; Liu, J.; Mou, J. Parameter identification of ship motion model based on multi-innovation methods. J. Mar. Sci. Technol. 2020, 25, 162–184. [Google Scholar] [CrossRef]
- Zhao, B.; Zhang, X.; Liang, C. A novel parameter identification algorithm for 3-DoF ship maneuvering modelling using nonlinear multi-innovation. J. Mar. Sci. Eng. 2022, 10, 581. [Google Scholar] [CrossRef]
- Zheng, Y.; Tao, J.; Sun, Q.; Sun, H.; Chen, Z.; Sun, M.; Xie, G. Soft Actor–Critic based active disturbance rejection path following control for unmanned surface vessel under wind and wave disturbances. Ocean Eng. 2022, 247, 110631. [Google Scholar] [CrossRef]
- Yasukawa, H.; Sakuno, R. Application of the MMG method for the prediction of steady sailing condition and course stability of a ship under external disturbances. J. Mar. Sci. Technol. 2020, 25, 196–220. [Google Scholar] [CrossRef]
- Gonzalez-Garcia, A.; Castañeda, H. Adaptive integral terminal super-twisting with finite-time convergence for an unmanned surface vehicle under disturbances. Int. J. Robust Nonlinear Control 2022, 32, 10271–10291. [Google Scholar] [CrossRef]
- Li, D.; Patton, R. Model Predictive Energy-Maximising Tracking Control for a Wavestar-Prototype Wave Energy Converter. J. Mar. Sci. Eng. 2023, 11, 1289. [Google Scholar] [CrossRef]
- Selimović, D.; Lerga, J.; Prpić-Oršić, J.; Kenji, S. Improving the performance of dynamic ship positioning systems: A review of filtering and estimation techniques. J. Mar. Sci. Eng. 2020, 8, 234. [Google Scholar] [CrossRef]
- Lee, J.; Nam, Y.; Kim, Y.; Liu, Y.; Lee, J.; Yang, H. Real-time digital twin for ship operation in waves. Ocean Eng. 2022, 266, 112867. [Google Scholar] [CrossRef]
- Han, X.; Ren, Z.; Leira, B.; Sævik, S. Adaptive identification of lowpass filter cutoff frequency for online vessel model tuning. Ocean Eng. 2021, 236, 109483. [Google Scholar] [CrossRef]
- Jiao, Y.; Zhao, H.; Wang, X.; Lou, T. An improved smooth variable structure filter and its application in ship–wave filtering. Iran. J. Sci. Technol. Trans. Electr. Eng. 2021, 45, 711–719. [Google Scholar] [CrossRef]
- Ouyang, Z.; Liu, S.; Zou, Z. Nonparametric modeling of ship maneuvering motion in waves based on Gaussian process regression. Ocean Eng. 2022, 264, 112100. [Google Scholar] [CrossRef]
- Zago, L.; Simos, A.; Kawano, A.; Kogishi, A. A new vessel motion based method for parametric estimation of the waves encountered by the ship in a seaway. Appl. Ocean. Res. 2023, 134, 103499. [Google Scholar] [CrossRef]
- Ding, F.; Liu, X.M.; Chen, H.B.; Yao, G.Y. Hierarchical gradient based and hierarchical least squares based iterative parameter identification for CARARMA systems. Signal Process. 2014, 97, 31–39. [Google Scholar] [CrossRef]
- Ding, F.; Liu, X.; Ma, X. Kalman state filtering based least squares iterative parameter estimation for observer canonical state space systems using decomposition. J. Comput. Appl. Math. 2016, 301, 135–143. [Google Scholar] [CrossRef]
- Xu, L. Separable synthesis estimation methods and convergence analysis for multivariable systems. J. Comput. Appl. Math. 2023, 427, 115104. [Google Scholar] [CrossRef]
- Zhang, X.; Ding, F. Adaptive parameter estimation for a general dynamical system with unknown states. Int. J. Robust Nonlinear Control 2020, 30, 1351–1372. [Google Scholar] [CrossRef]
- Liu, Q.Y.; Chen, F.Y. Model transformation based distributed stochastic gradient algorithm for multivariate output-error systems. Int. J. Syst. Sci. 2023, 54, 1484–1502. [Google Scholar] [CrossRef]
- Zhang, X.; Ding, F.; Xu, L. Recursive parameter estimation methods and convergence analysis for a special class of nonlinear systems. Int. J. Robust Nonlinear Control 2020, 30, 1373–1393. [Google Scholar] [CrossRef]
- Zhang, X.; Ding, F.; Xu, L.; Yang, E.F. Highly computationally efficient state filter based on the delta operator. Int. J. Adapt. Control Signal Process. 2019, 33, 875–889. [Google Scholar] [CrossRef]
- Zhang, X.; Ding, F.; Yang, E.F. State estimation for bilinear systems through minimizing the covariance matrix of the state estimation errors. Int. J. Adapt. Control Signal Process. 2019, 33, 1157–1173. [Google Scholar] [CrossRef]
- Miao, G.Q.; Ding, F.; Liu, Q.Y.; Yang, E.F. Iterative parameter identification algorithms for transformed dynamic rational fraction input-output systems. J. Comput. Appl. Math. 2023, 434, 115297. [Google Scholar] [CrossRef]
- Ding, F.; Wang, Y.; Ding, J. Recursive least squares parameter identification algorithms for systems with colored noise using the filtering technique and the auxilary model. Digit. Signal Process. 2015, 37, 100–108. [Google Scholar] [CrossRef]
- Yang, D.; Ding, F. Multi-innovation gradient-based iterative identification methods for feedback nonlinear systems by using the decomposition technique. Int. J. Robust Nonlinear Control 2023, 33, 7755–7773. [Google Scholar] [CrossRef]
- Yang, D.; Liu, Y.J. Hierarchical gradient-based iterative parameter estimation algorithms for a nonlinear feedback system based on the hierarchical identification principle. Circuits Syst. Signal Process. 2023, 43, 1–28. [Google Scholar] [CrossRef]
- Sun, S.; Xu, L.; Ding, F. Parameter estimation methods of linear continuous-time time-delay systems from multi-frequency response data. Circuits Syst. Signal Process. 2023, 42, 3360–3384. [Google Scholar] [CrossRef]
- Fossen, T. Guidance and Control of Ocean Vehicles; John Wiley & Sons: New York, NY, USA, 1994. [Google Scholar]
- Åström, K.; Källström, C. Identification of ship steering dynamics. Automatica 1976, 12, 9–22. [Google Scholar] [CrossRef]
- Ji, Y.; Liu, J.; Liu, H.B. An identification algorithm of generalized time-varying systems based on the Taylor series expansion and applied to a pH process. J. Process Control 2023, 128, 103007. [Google Scholar] [CrossRef]
- Ding, F.; Liu, Y.J.; Bao, B. Gradient based and least squares based iterative estimation algorithms for multi-input multi-output systems. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2012, 226, 43–55. [Google Scholar] [CrossRef]
- Ji, Y.; Jiang, A.N. Filtering-based accelerated estimation approach for generalized time-varying systems with disturbances and colored noises. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 206–210. [Google Scholar] [CrossRef]
- Pan, J.; Liu, S.D.; Shu, J.; Wan, X.K. Hierarchical recursive least squares estimation algorithm for secondorder Volterra nonlinear systems. Int. J. Control Autom. Syst. 2022, 20, 3940–3950. [Google Scholar] [CrossRef]
- Xu, L.; Ding, F. Decomposition and composition modeling algorithms for control systems with colored noises. Int. J. Adapt. Control Signal Process. 2024, 38, 255–278. [Google Scholar] [CrossRef]
- Li, M.H.; Liu, X.M. Iterative identification methods for a class of bilinear systems by using the particle filtering technique. Int. J. Adapt. Control Signal Process. 2021, 35, 2056–2074. [Google Scholar] [CrossRef]
- Xu, H.; Champagne, B. Joint parameter and time-delay estimation for a class of nonlinear time-series models. IEEE Signal Process. Lett. 2022, 29, 947–951. [Google Scholar] [CrossRef]
- Li, M.; Liu, X. Particle filtering-based iterative identification methods for a class of nonlinear systems with interval-varying measurements. Int. J. Control Autom. Syst. 2022, 20, 2239–2248. [Google Scholar] [CrossRef]
- Sun, S.Y.; Xu, L.; Ding, F.; Sheng, J. Filtered multi-innovation-based iterative identification methods for multivariate equation-error ARMA systems. Int. J. Adapt. Control Signal Process. 2023, 37, 836–855. [Google Scholar] [CrossRef]
- Chen, J.; Pu, Y.; Guo, L.X.; Cao, J.F.; Zhu, Q. Second-order optimization methods for time-delay Autoregressive eXogenous models: Nature gradient descent method and its two modified methods. Int. J. Adapt. Control Signal Process. 2023, 37, 211–223. [Google Scholar] [CrossRef]
- Sun, S.Y.; Wang, X.; Ding, F. Hierarchical iterative identification algorithms for a nonlinear system with dead-zon and saturation nonlinearity based on the auxiliary model. Int. J. Adapt. Control Signal Process. 2023, 37, 1866–1892. [Google Scholar] [CrossRef]
- Wang, X.Y.; Ma, J.X.; Xiong, W.L. Expectation-maximization algorithm for bilinear state-space models with time-varying delays under non-Gaussian noise. Int. J. Adapt. Control Signal Process. 2023, 37, 2706–2724. [Google Scholar] [CrossRef]
- Ding, F.; Chen, T.; Qiu, L. Bias compensation based recursive least squares identification algorithm for MISO systems. IEEE Trans. Circuits Syst. II Express Briefs. 2006, 53, 349–353. [Google Scholar] [CrossRef]
- Bi, Y.Q.; Ji, Y. Parameter estimation of fractional-order Hammerstein state space system based on the extended Kalman filter. Int. J. Adapt. Control Signal Process. 2023, 37, 1827–1846. [Google Scholar] [CrossRef]
- Zhou, Y. Modeling nonlinear processes using the radial basis function-based state-dependent autoregressive models. IEEE Signal Process. Lett. 2020, 27, 1600–1604. [Google Scholar] [CrossRef]
- Goodwin, G.; Sin, K. Adaptive Filtering Prediction and Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1984; Volume 12, pp. 9–22. [Google Scholar]
- Ding, F.; Yang, H.; Liu, F. Identification of ship steering dynamics. Sci. China Ser. F Inf. Sci. 2008, 51, 1269–1280. [Google Scholar] [CrossRef]
- Ding, F.; Chen, T. Performance analysis of multi-innovation gradient type identification methods. Automatica 2007, 43, 1–14. [Google Scholar] [CrossRef]
- Xu, L. Separable multi-innovation Newton iterative modeling algorithm for multi-frequency signals based on the sliding measurement window. Circuits Syst. Signal Process. 2022, 41, 805–830. [Google Scholar] [CrossRef]
- Xu, L. Separable synchronous multi-innovation gradient-based iterative signal modeling from on-line measurements. IEEE Trans. Instrum. Meas. 2022, 71, 6501313. [Google Scholar] [CrossRef]
- Pan, J.; Liu, Y.Q.; Shu, J. Gradient-based parameter estimation for an exponential nonlinear autoregressive time-series model by using the multi-innovation. Int. J. Control Autom. Syst. 2023, 21, 140–150. [Google Scholar] [CrossRef]
- Pan, J.; Zhang, H.; Guo, H.; Liu, S.; Liu, Y. Multivariable CAR-like system identification with multi-innovation gradient and least squares algorithms. Int. J. Control Autom. Syst. 2023, 21, 1455–1464. [Google Scholar] [CrossRef]
- Ding, F. Least squares parameter estimation and multi-innovation least squares methods for linear fitting problems from noisy data. J. Comput. Appl. Math. 2023, 426, 115107. [Google Scholar] [CrossRef]
- Ding, F.; Xu, L.; Zhang, X.; Zhou, Y.H. Filtered auxiliary model recursive generalized extended parameter estimation methods for Box-Jenkins systems by means of the filtering identification idea. Int. J. Robust Nonlinear Control. 2023, 33, 5510–5535. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhang, X. Hierarchical estimation approach for RBF-AR models with regression weights based on the increasing data length. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3597–3601. [Google Scholar] [CrossRef]
- Zhou, Y.H.; Ling, K.V.; Ding, F.; Hu, Y.D. Online network-based identification and its application in satellite attitude control systems. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 2530–2543. [Google Scholar] [CrossRef]
- Zhou, Y.H.; Ding, F. A novel coupled recursive multivariate nonlinear time-series modelling method by using interactive identification. Appl. Math. Modell. 2024, 127, 571–587. [Google Scholar] [CrossRef]
- Li, M.H.; Liu, X.M. The filtering-based maximum likelihood iterative estimation algorithms for a special class of nonlinear systems with autoregressive moving average noise using the hierarchical identification principle. Int. J. Adapt. Control Signal Process. 2019, 33, 1189–1211. [Google Scholar] [CrossRef]
- Liu, W.X.; Li, M.H. Unbiased recursive least squares identification methods for a class of nonlinear systems with irregularly missing data. Int. J. Adapt. Control Signal Process. 2023, 37, 2247–2275. [Google Scholar] [CrossRef]
- Ding, F.; Chen, T.; Iwai, Z. Adaptive digital control of Hammerstein nonlinear systems with limited output sampling. SIAM J. Control Optim. 2007, 45, 2257–2276. [Google Scholar] [CrossRef]
- An, S.; He, Y.; Wang, L.J. Maximum likelihood based multi-innovation stochastic gradient identification algorithms for bilinear stochastic systems with ARMA noise. Int. J. Adapt. Control Signal Process. 2023, 37, 2690–2705. [Google Scholar] [CrossRef]
- Ding, F.; Xu, L.; Zhang, X.; Ma, H. Hierarchical gradient- and least-squares-based iterative estimation algorithms for input-nonlinear output-error systems by using the over-parameterization. Int. J. Robust Nonlinear Control 2024, 34, 1120–1147. [Google Scholar] [CrossRef]
- Ji, Y.; Zhang, C.; Kang, Z.; Yu, T. Parameter estimation for block-oriented nonlinear systems using the key term separation. Int. J. Robust Nonlinear Control 2020, 30, 3727–3752. [Google Scholar] [CrossRef]
- Wan, L.J. Decomposition- and gradient-based iterative identification algorithms for multivariable systems using the multi-innovation theory. Circuits Syst. Signal Process. 2019, 38, 2971–2991. [Google Scholar] [CrossRef]
- Ji, Y.; Kang, Z.; Liu, X.M. The data filtering based multiple-stage Levenberg-Marquardt algorithm for Hammerstein nonlinear systems. Int. J. Robust Nonlinear Control 2021, 31, 7007–7025. [Google Scholar] [CrossRef]
- Gu, Y.; Zhu, Q.; Nouri, H. Identification and U-control of a state-space system with time-delay. Int. J. Adapt. Control Signal Process. 2022, 36, 138–154. [Google Scholar] [CrossRef]
- Wang, Y.J.; Tang, S.H.; Gu, X.B. Parameter estimation for nonlinear Volterra systems by using the multi-innovation identification theory and tensor decomposition. J. Frankl. Inst. 2022, 359, 1782–1802. [Google Scholar] [CrossRef]
- Li, J.M.; Ding, F.; Hayat, T. A novel nonlinear optimization method for fitting a noisy Gaussian activation function. Int. J. Adapt. Control Signal Process. 2022, 36, 690–707. [Google Scholar] [CrossRef]
- Wang, Y.J.; Yang, L. An efficient recursive identification algorithm for multilinear systems based on tensor decomposition. Int. J. Robust Nonlinear Control 2021, 31, 7920–7936. [Google Scholar] [CrossRef]

| Length between perpendiculars L (m) | 189.0 |
| Breadth (molded) B (m) | |
| Designed draft D (m) | |
| Volume of displacement ∇ (m) | 42,293.0 |
| Block coefficient | |
| Trial speed V (kn) | |
| Rudder area (m) | 38 |
| Longitudinal center of gravity (m) |
| Turning ability index K (1/s) | 0.38 |
| Following index T (s) | |
| 23,928.91 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zhang, Q.; Wang, L.; An, S.; He, Y.; Fan, Z.; Deng, F. Identification of Multi-Innovation Stochastic Gradients with Maximum Likelihood Algorithm Based on Ship Maneuverability and Wave Peak Models. J. Mar. Sci. Eng. 2024, 12, 142. https://doi.org/10.3390/jmse12010142
Liu Y, Zhang Q, Wang L, An S, He Y, Fan Z, Deng F. Identification of Multi-Innovation Stochastic Gradients with Maximum Likelihood Algorithm Based on Ship Maneuverability and Wave Peak Models. Journal of Marine Science and Engineering. 2024; 12(1):142. https://doi.org/10.3390/jmse12010142
Chicago/Turabian StyleLiu, Yang, Qiang Zhang, Longjin Wang, Shun An, Yan He, Zhimin Fan, and Fang Deng. 2024. "Identification of Multi-Innovation Stochastic Gradients with Maximum Likelihood Algorithm Based on Ship Maneuverability and Wave Peak Models" Journal of Marine Science and Engineering 12, no. 1: 142. https://doi.org/10.3390/jmse12010142
APA StyleLiu, Y., Zhang, Q., Wang, L., An, S., He, Y., Fan, Z., & Deng, F. (2024). Identification of Multi-Innovation Stochastic Gradients with Maximum Likelihood Algorithm Based on Ship Maneuverability and Wave Peak Models. Journal of Marine Science and Engineering, 12(1), 142. https://doi.org/10.3390/jmse12010142