
Performance Analysis of a Floating Wind–Wave Power Generation Platform Based on the Frequency Domain Model

 ,
, 

 and
and 
Abstract
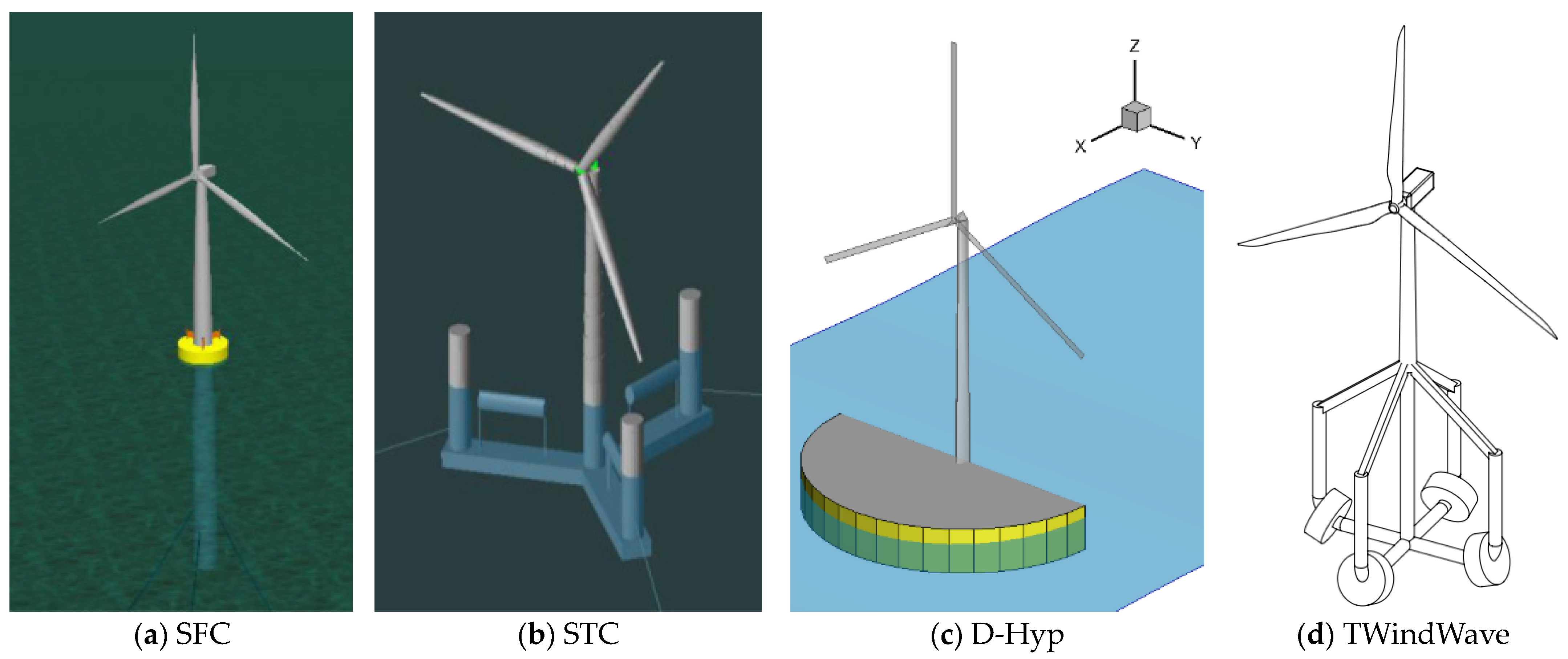
1. Introduction
2. Theory Background
2.1. Frequency-Domain Model for Multiple Floating Bodies with Constraints
2.2. Assessment of Point-Absorber Power Generation
3. Layout of Wind–Wave Platform and Hydrodynamic Analysis
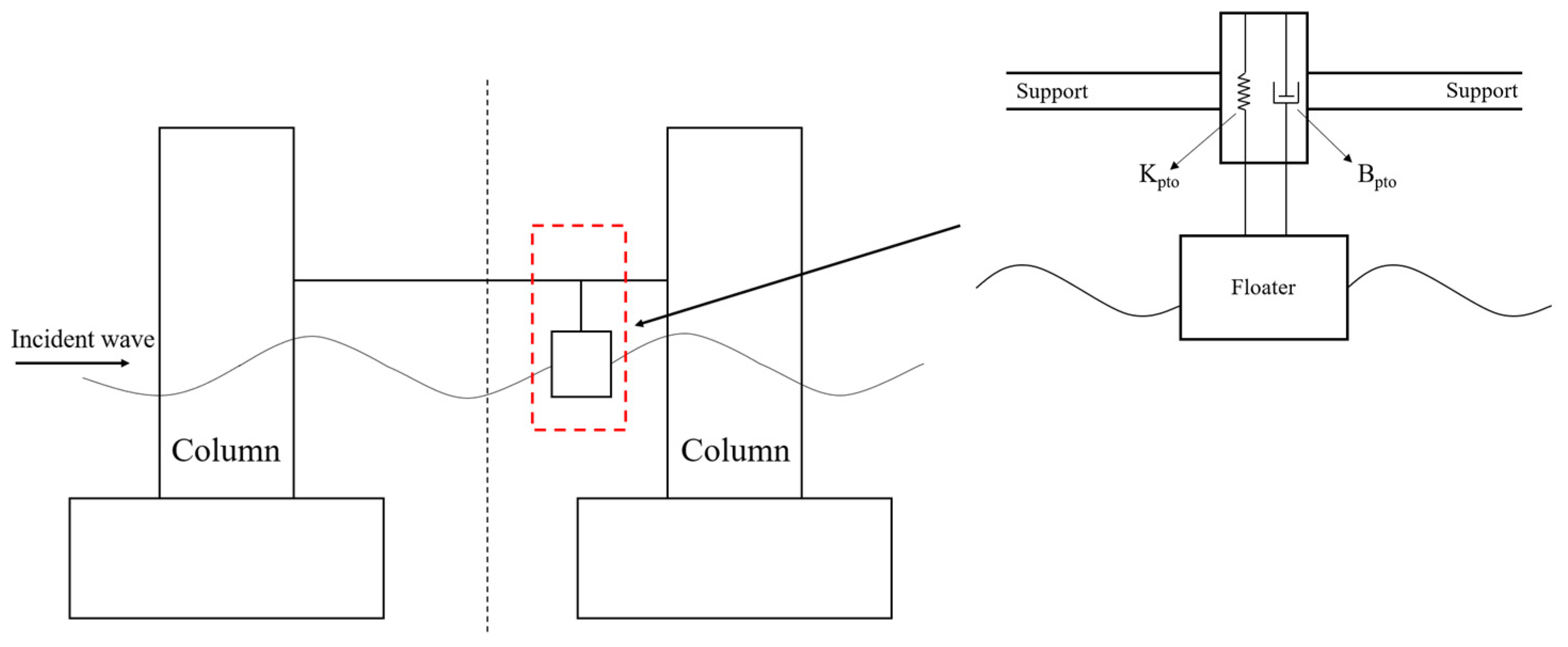
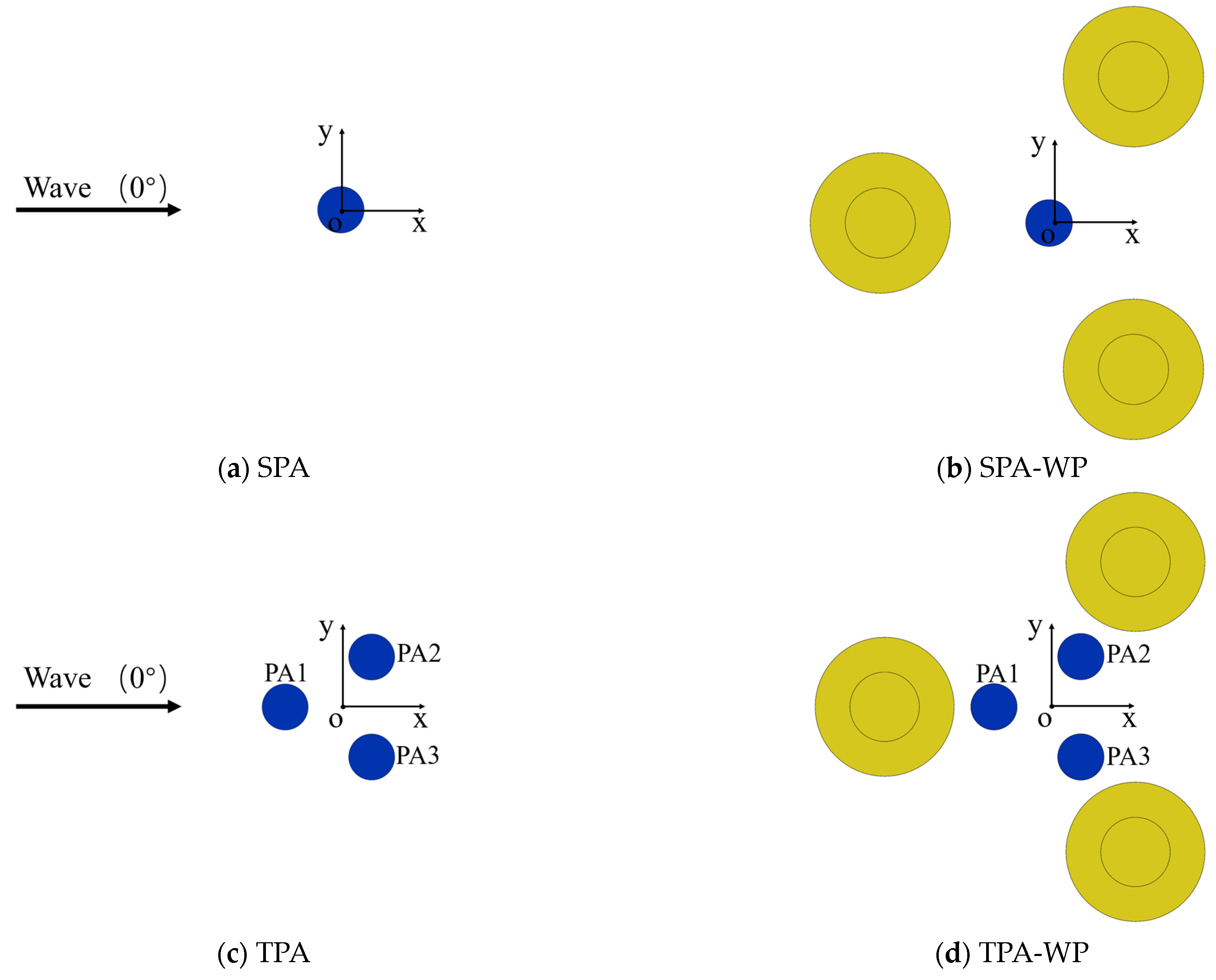
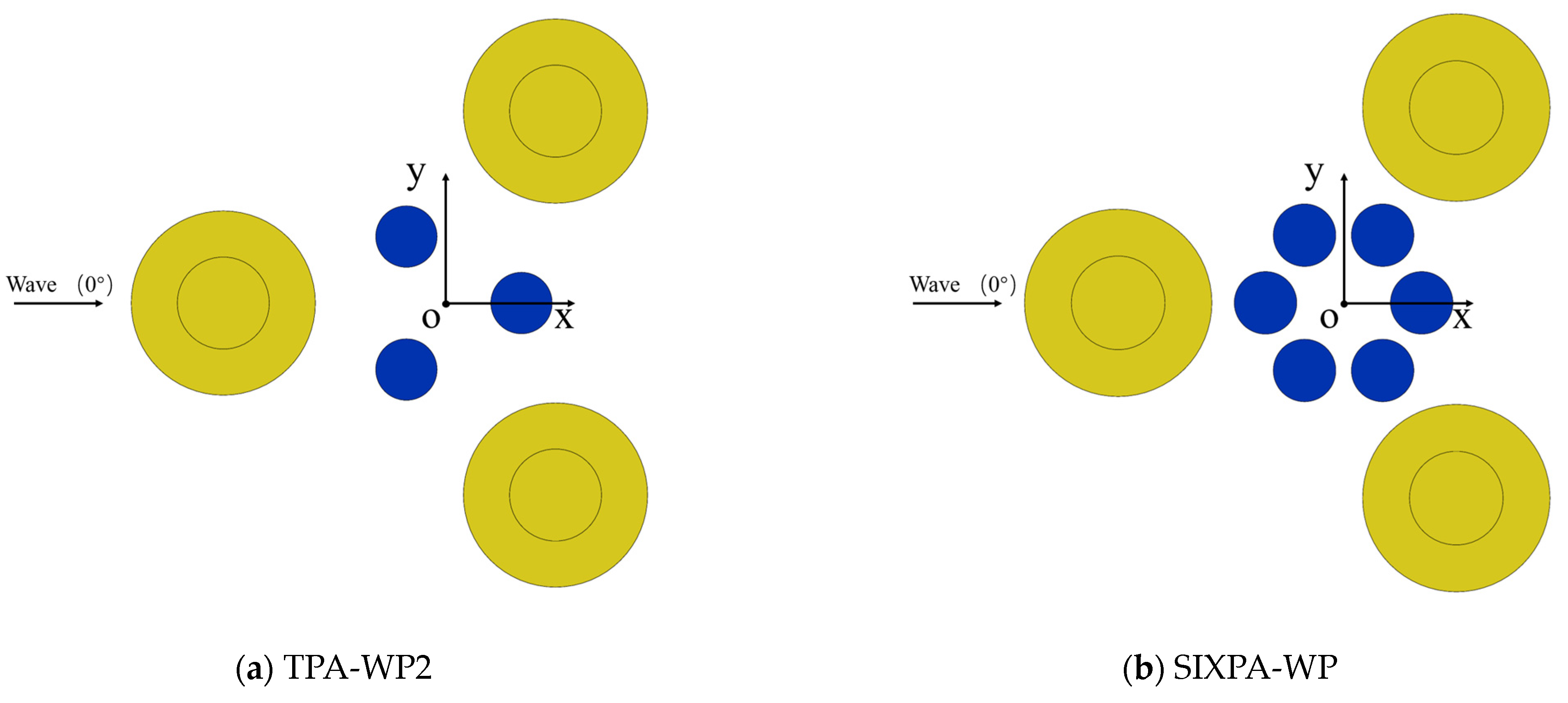
3.1. Layout of Floating Wind–Wave Power Generation Platform
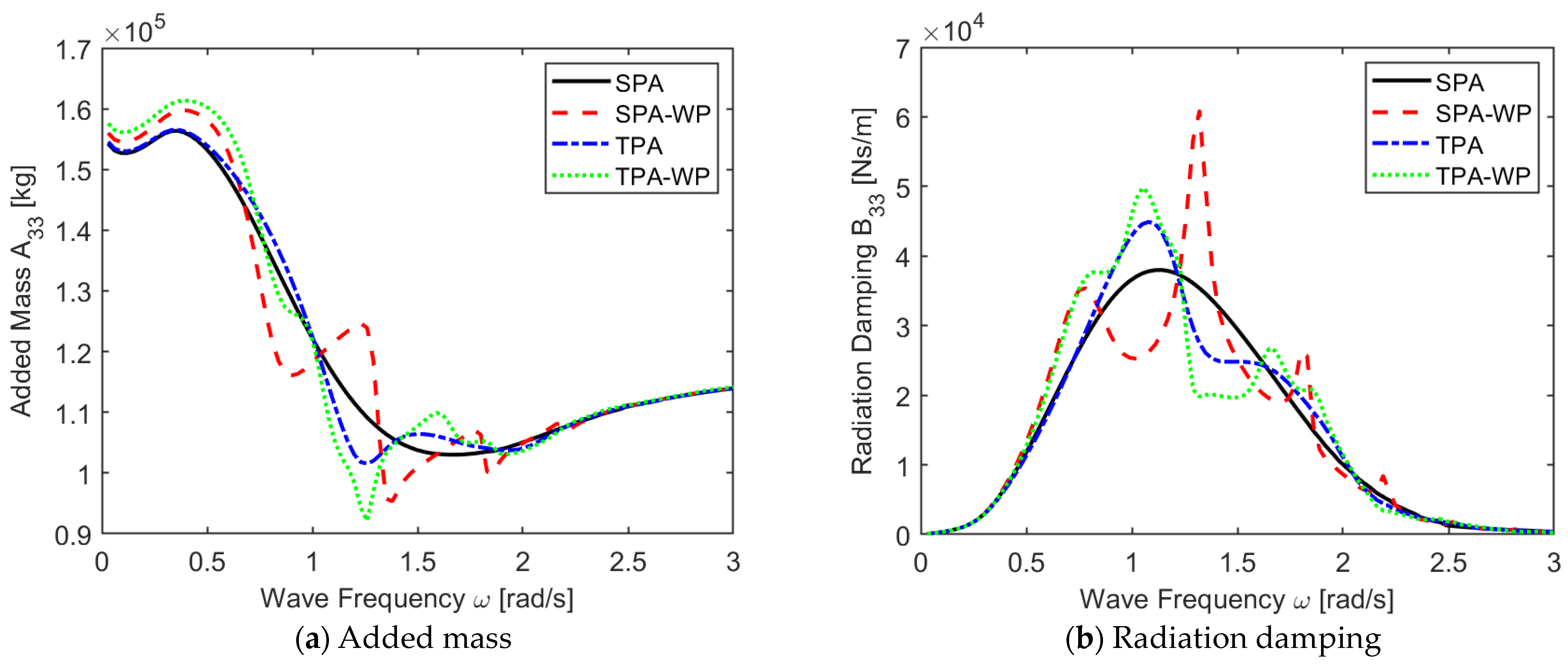
3.2. Multi-Body Hydrodynamic Analysis
4. Optimization of Power Generation in Frequency Domain
4.1. Verification of Motions of Multiple Floating Bodies with Constraints
4.2. Optimization of PTO
4.3. The Expected Power in the South China Sea
5. Conclusions
- (1)
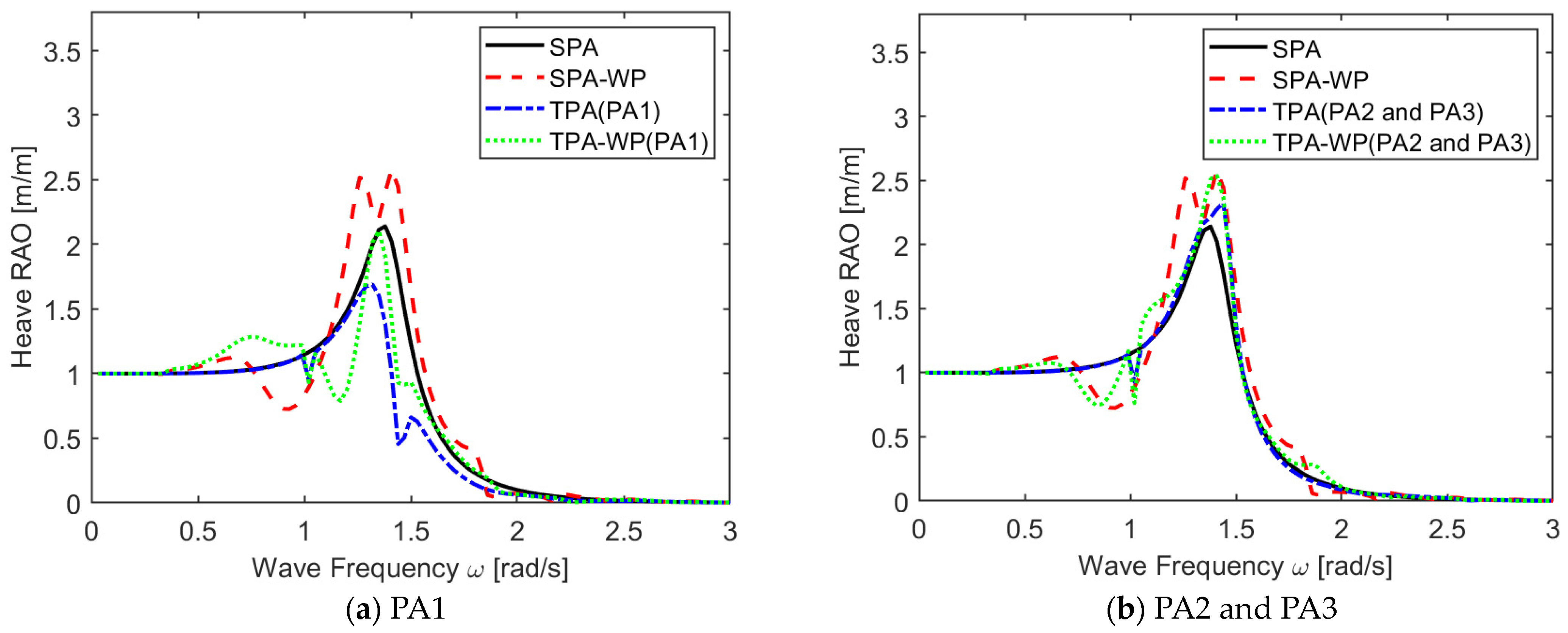
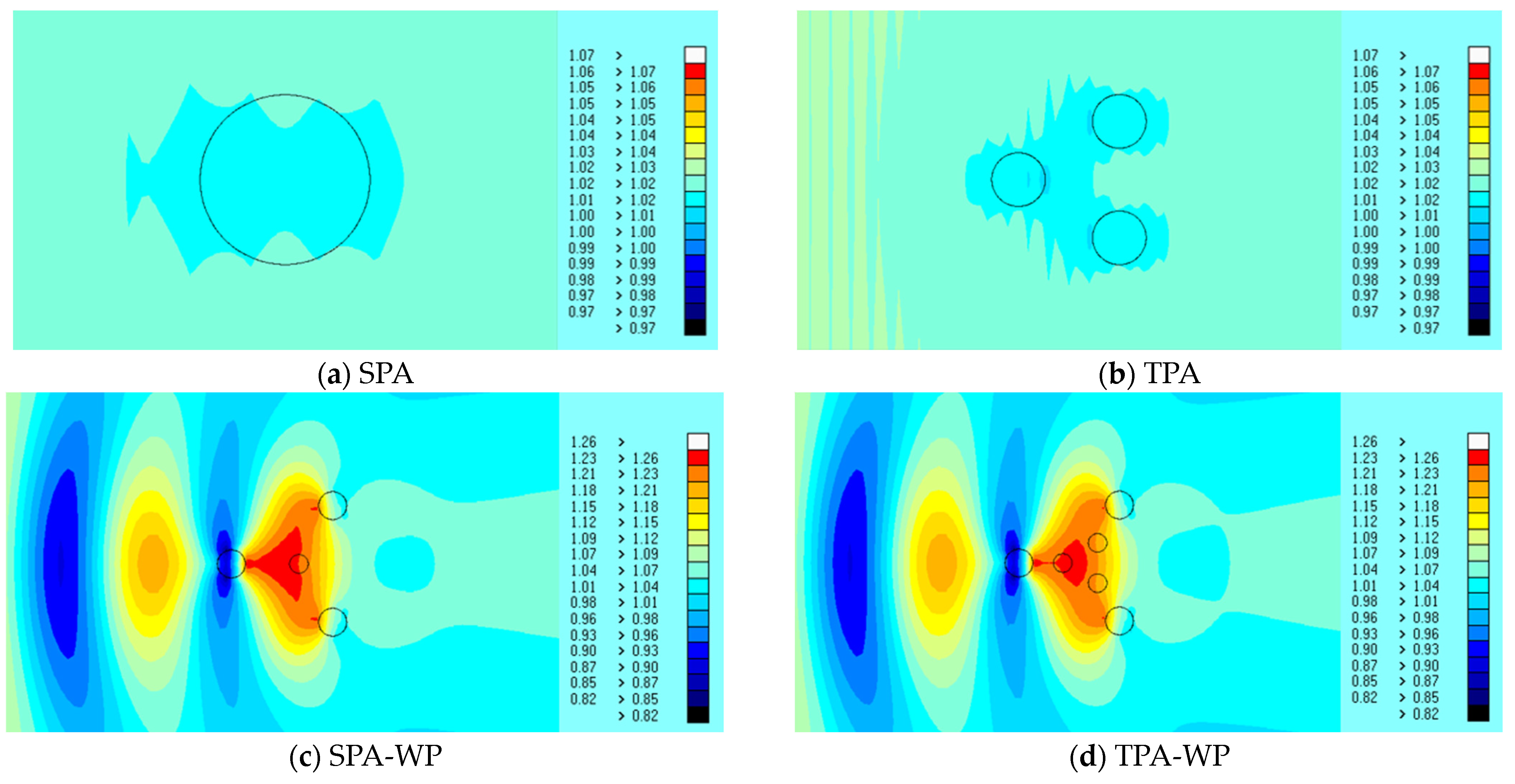
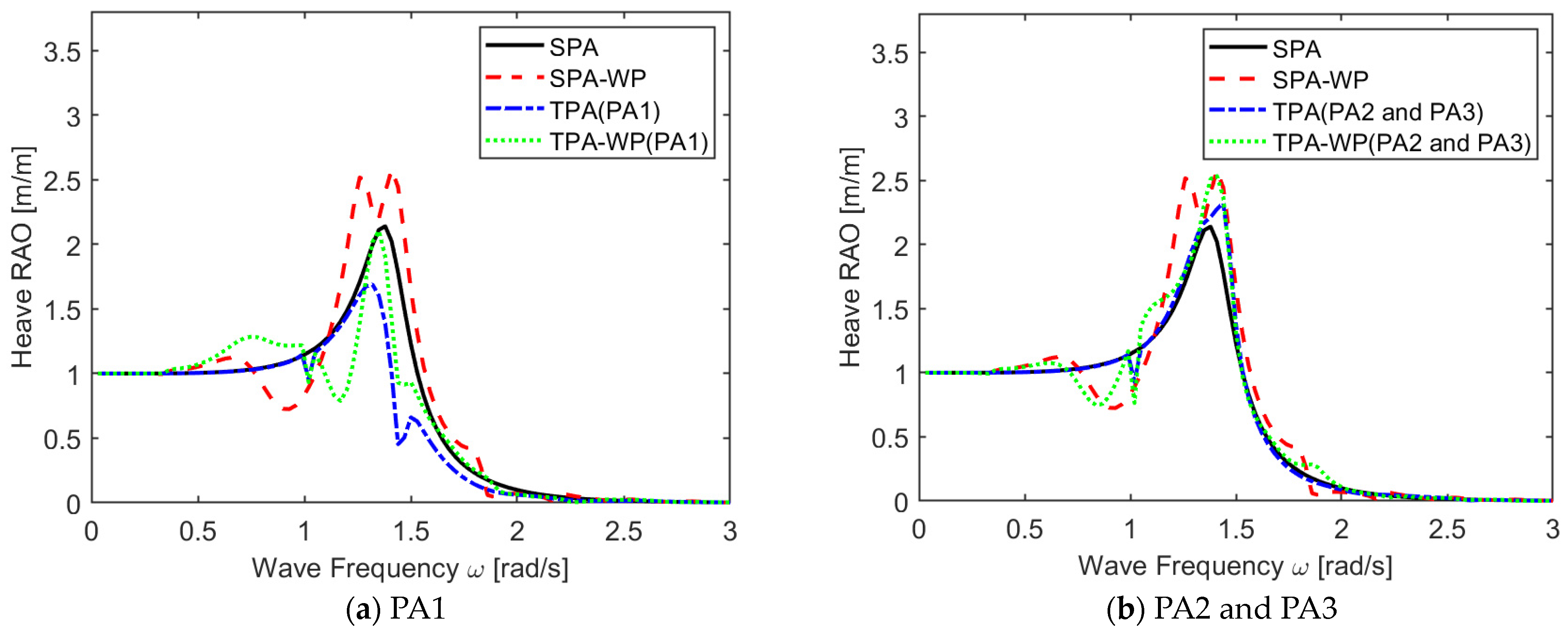
- The hydrodynamic coefficients in the heave DOF of the point absorbers are significantly influenced by the floating platform. Regardless of the arrangement of point absorbers on the platform, both added mass and radiation damping exhibit varying degrees of increase. This leads to higher RAO peak values compared to the model without a floating platform. The hydrodynamic coefficients of the floating platform, however, are minimally affected by the point absorbers.
- (2)
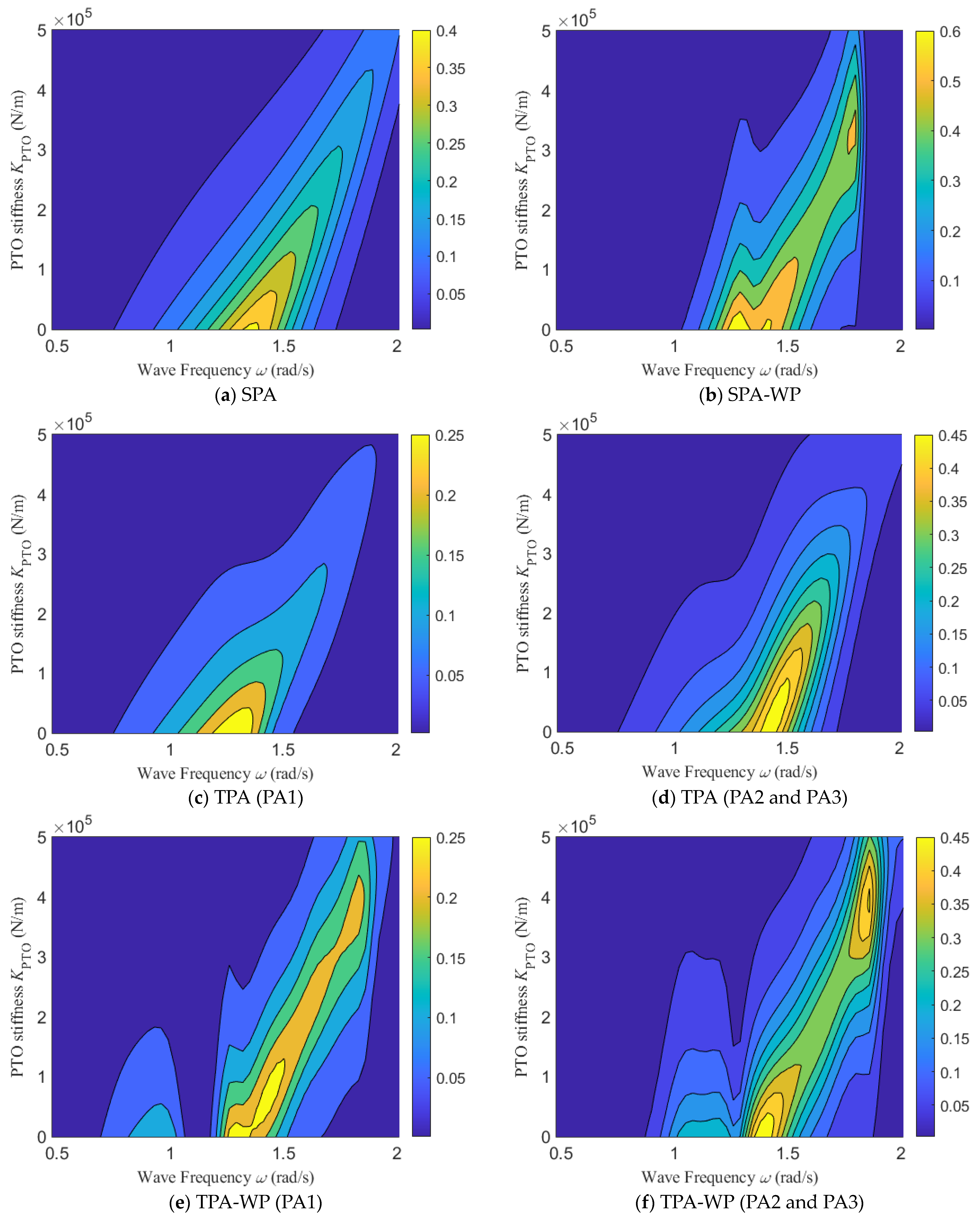
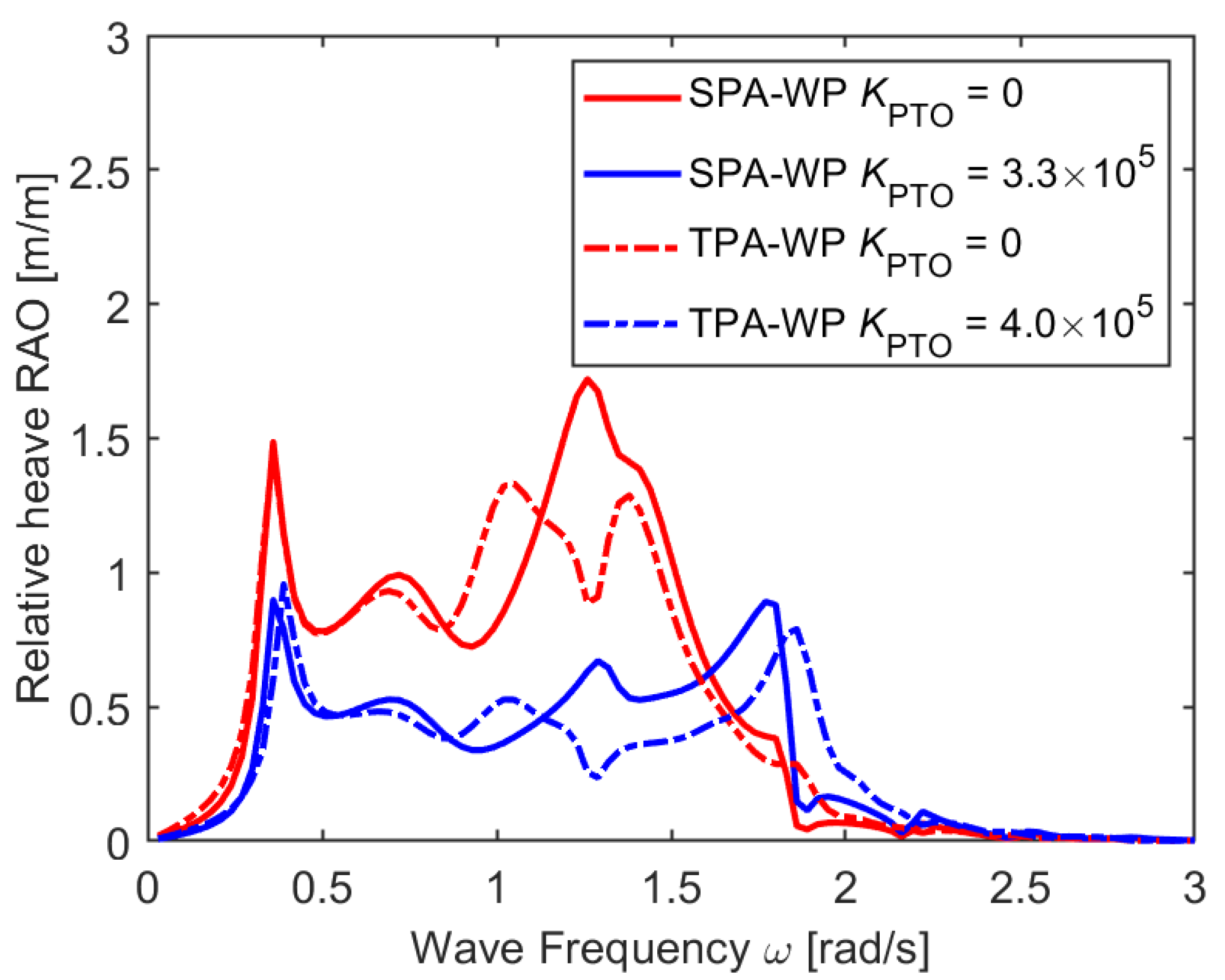
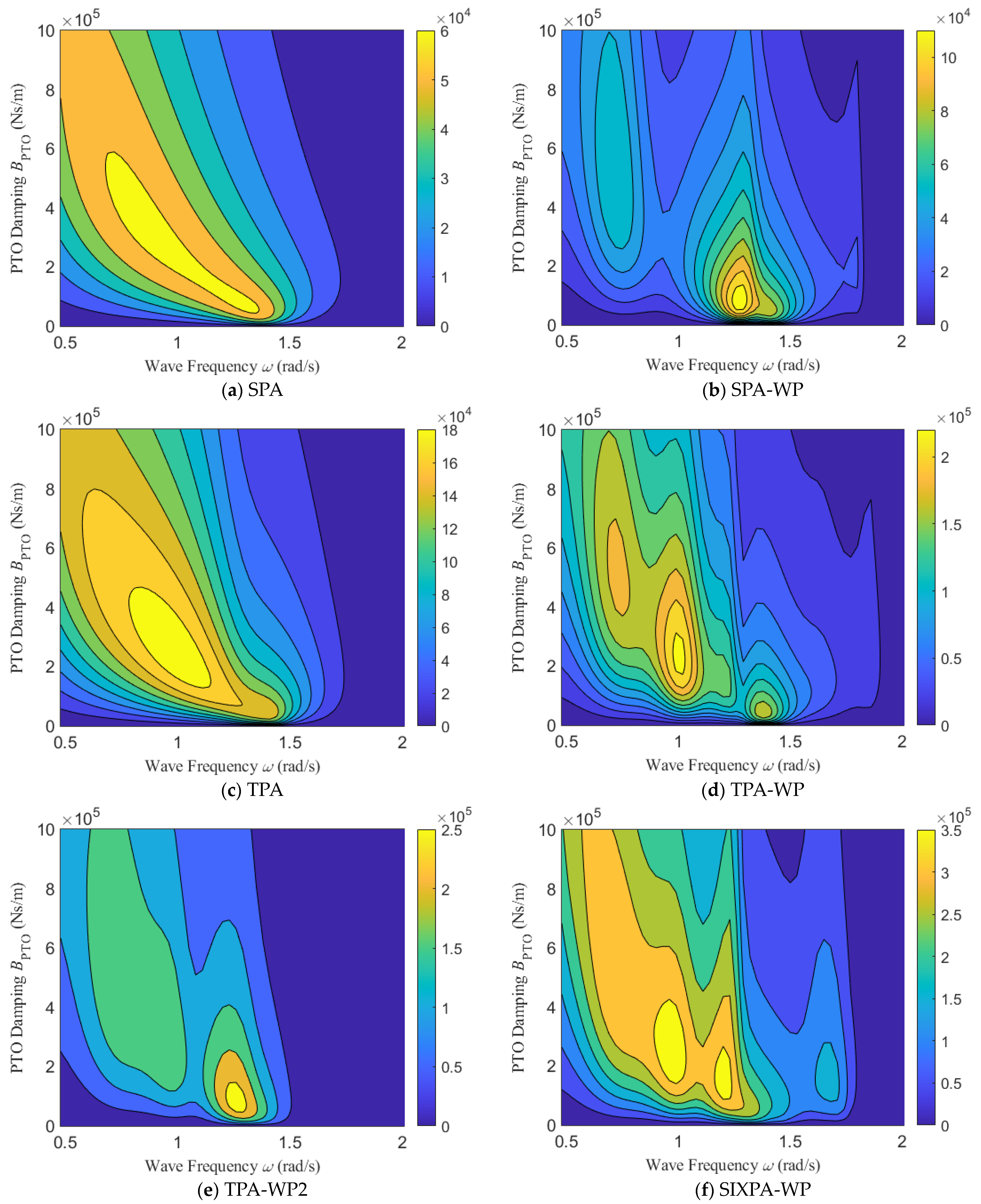
- Regardless of the arrangement of point absorbers, the optimal PTO stiffness that maximizes the CWR tends towards zero. Only when the floating foundation is considered does the CWR exhibit a secondary peak, with the corresponding PTO stiffness of around 3 × 105–4 × 105 N/m. This suggests that increasing stiffness can change the resonance frequency of the hybrid system to some extent.
- (3)
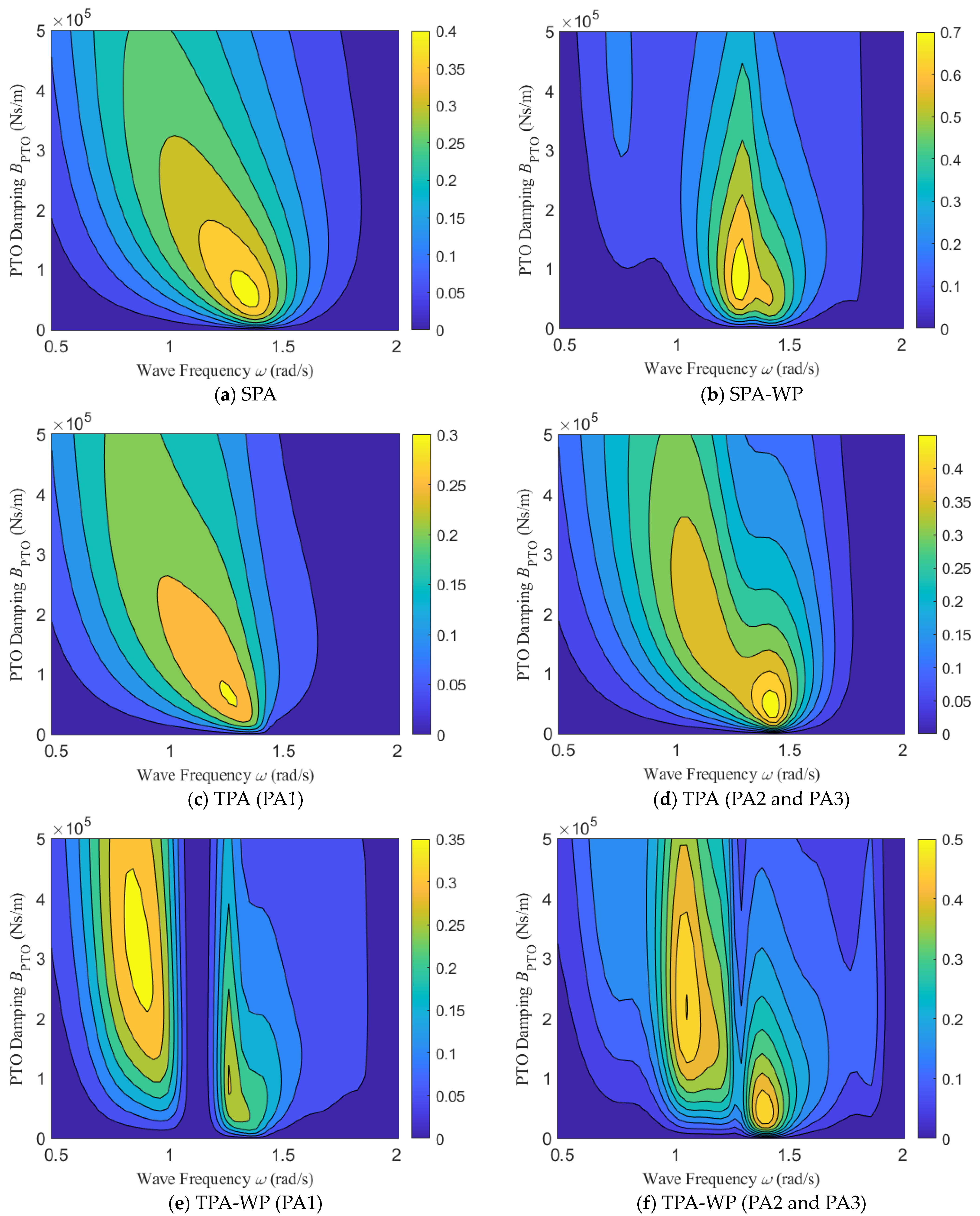
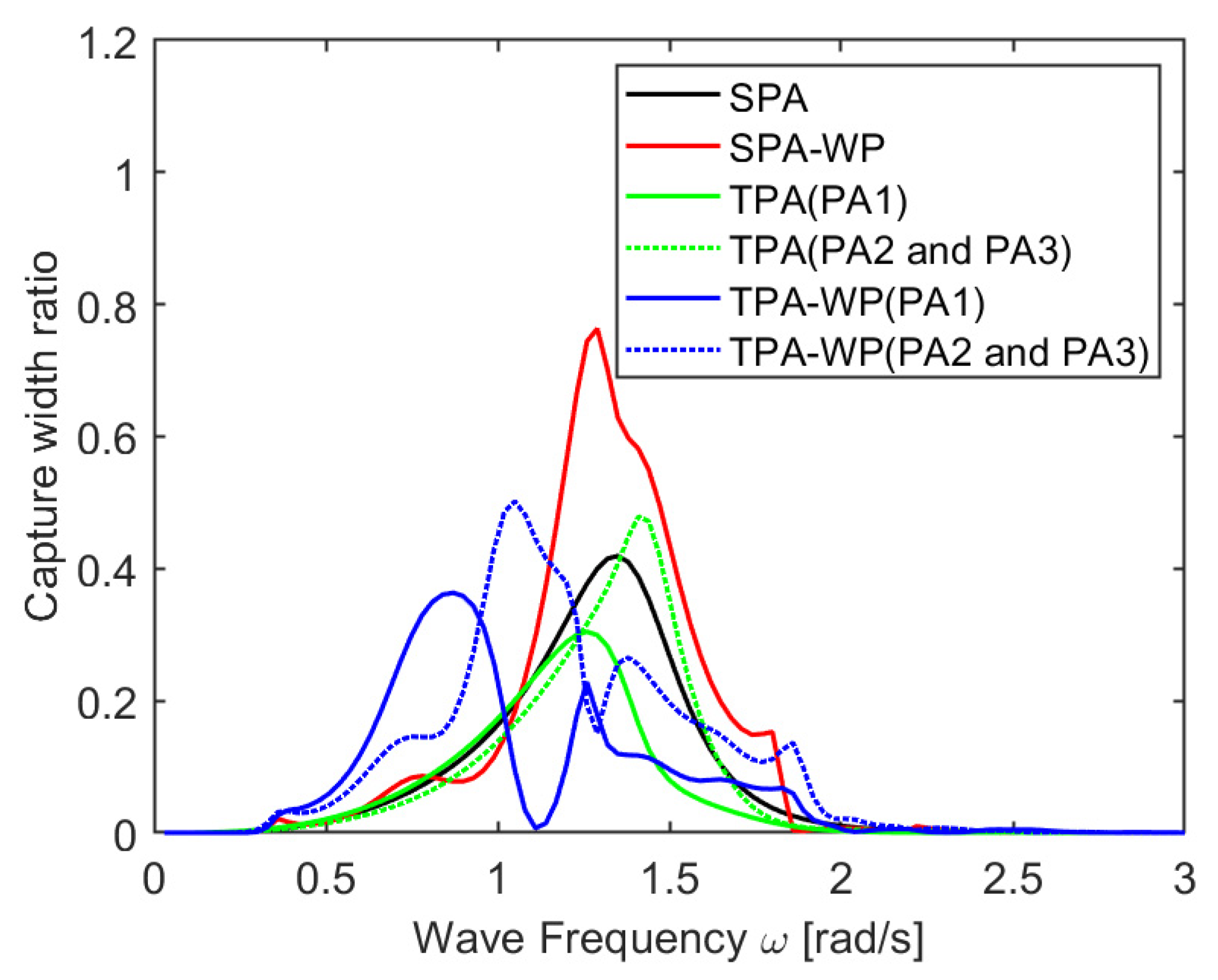
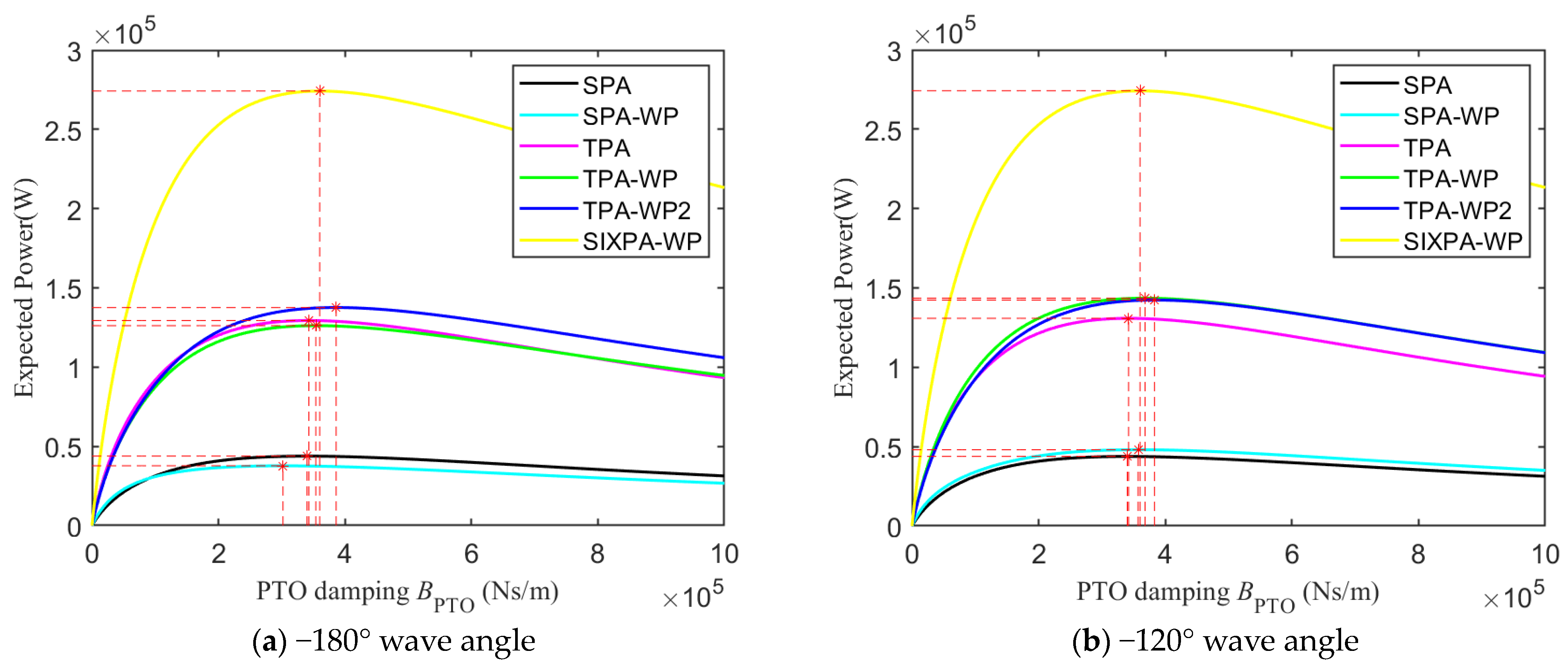
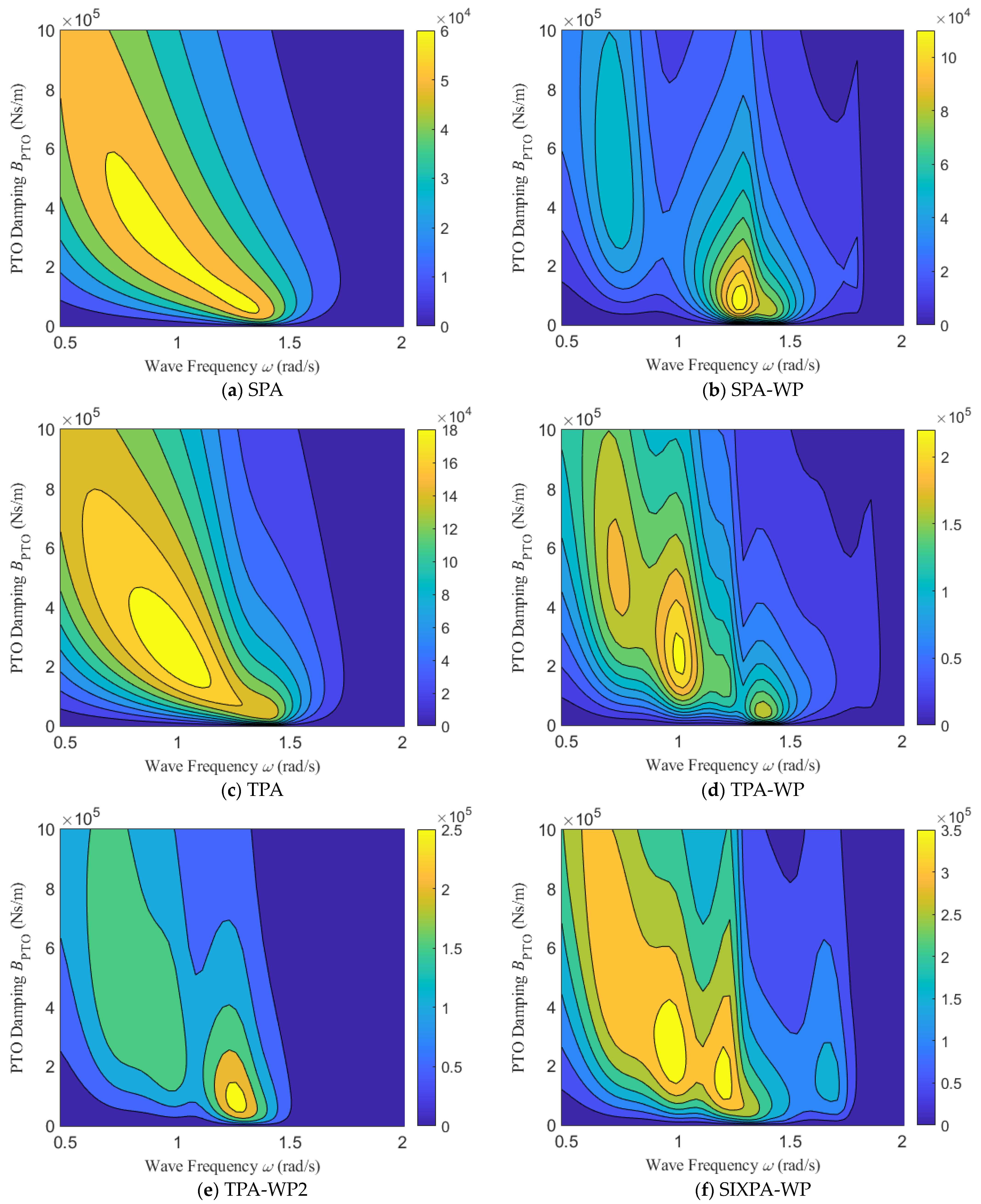
- When considering the optimal PTO damping coefficient, the CWR values of the point absorbers all exhibit a peak near their natural frequencies. When a three-point-absorber array is arranged on the floating platform, the peak shifts towards the natural frequency of the platform, and the optimal PTO stiffness significantly increases. It can be inferred that array arrangements can alter the working conditions and adaptability range of point absorbers.
- (4)
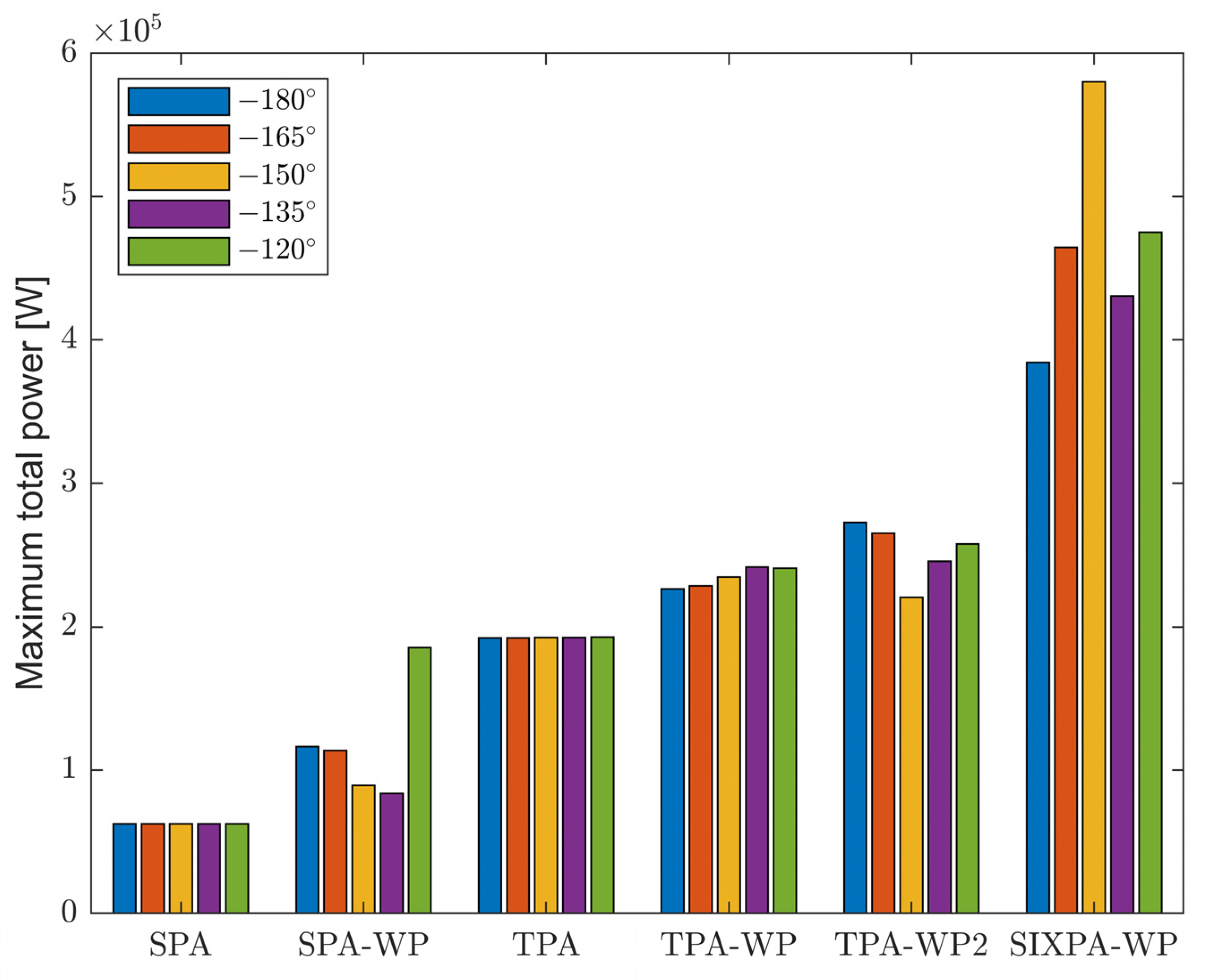
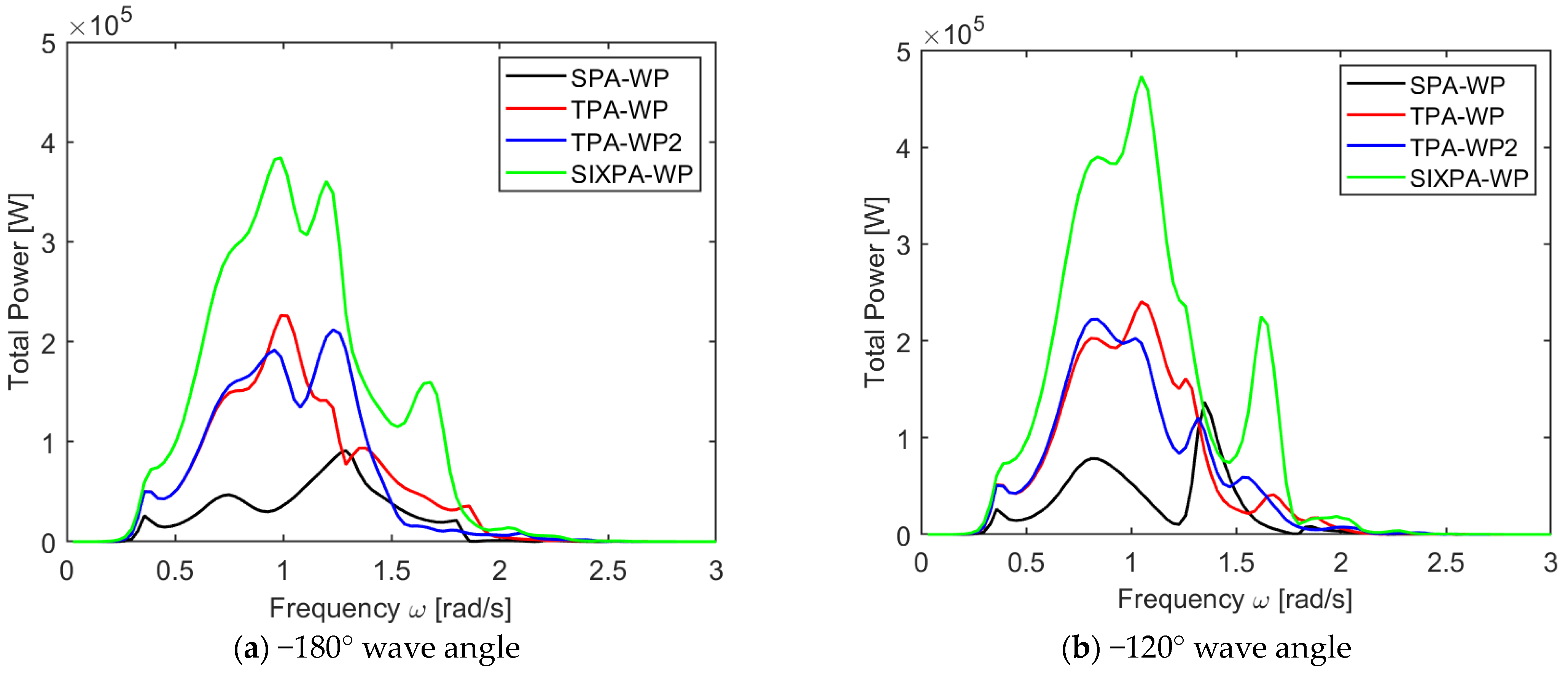
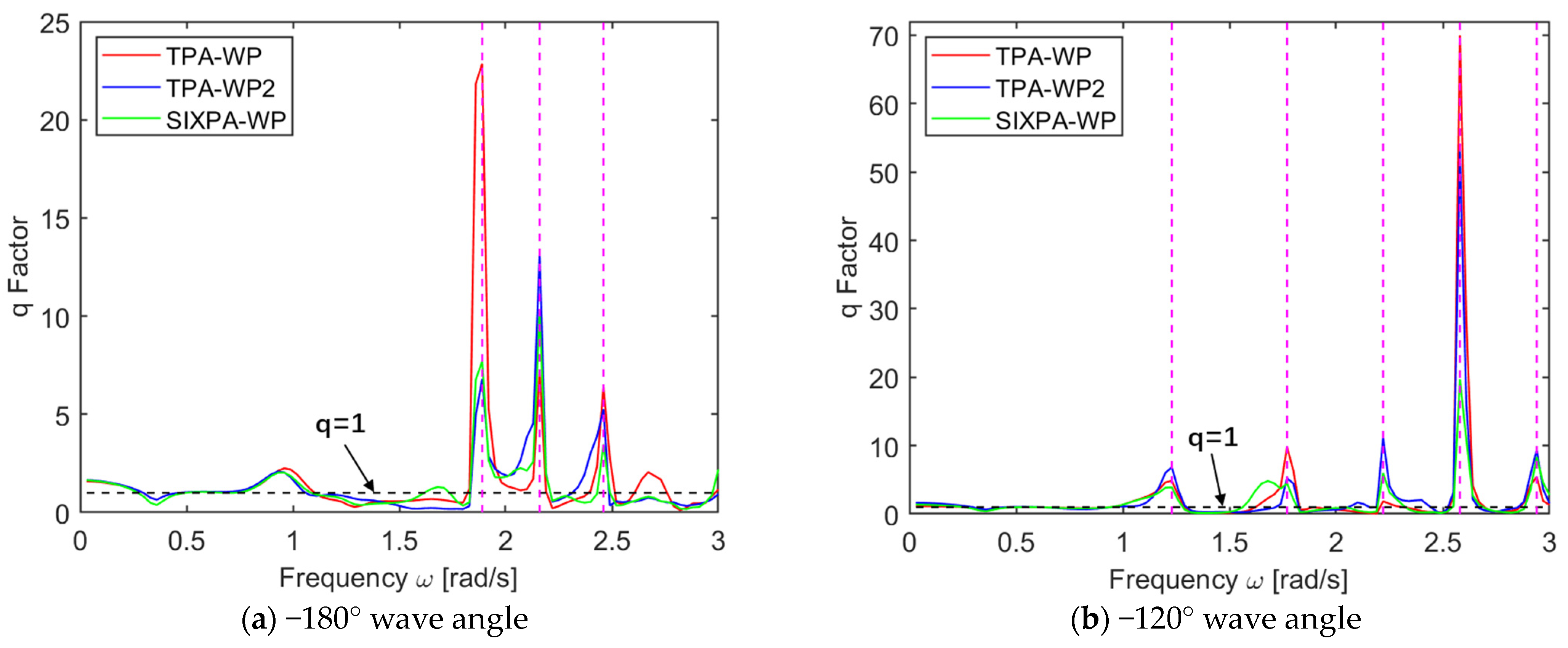
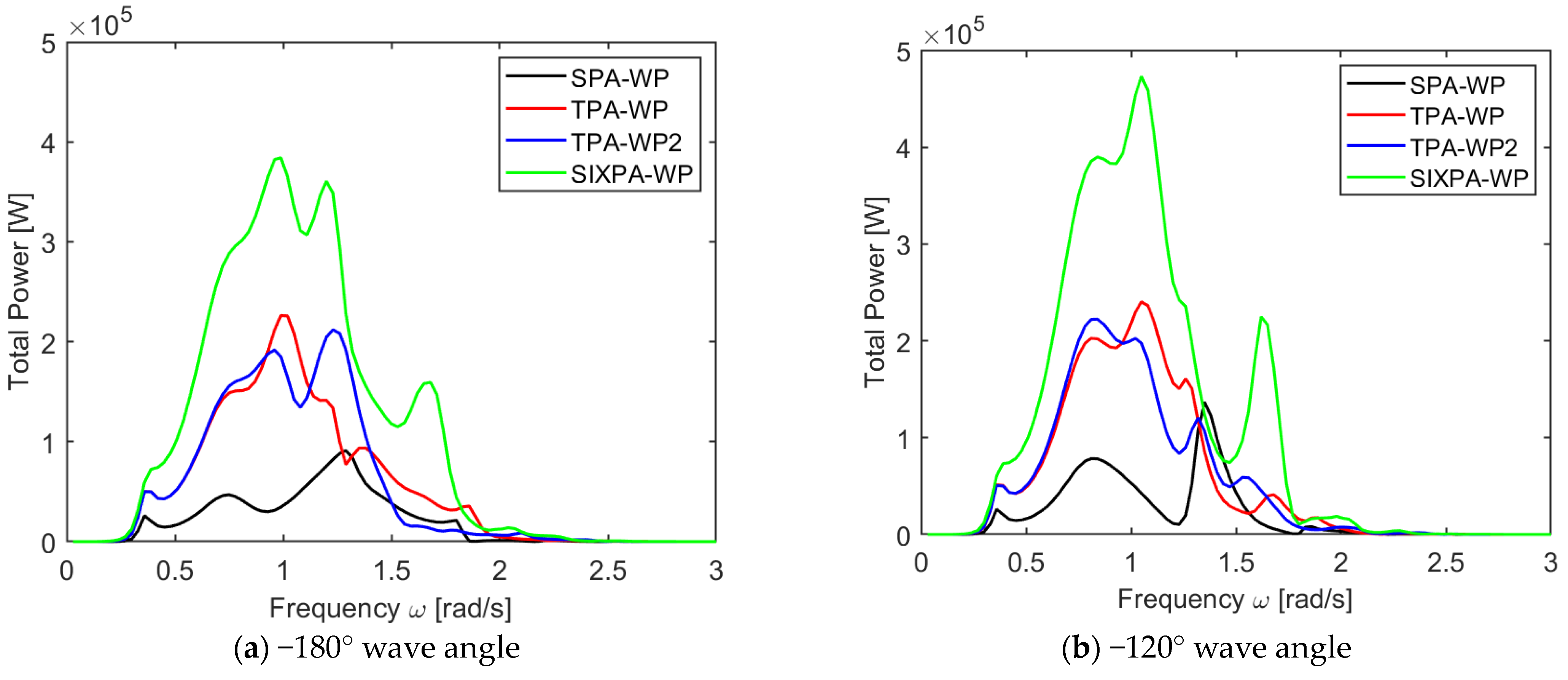
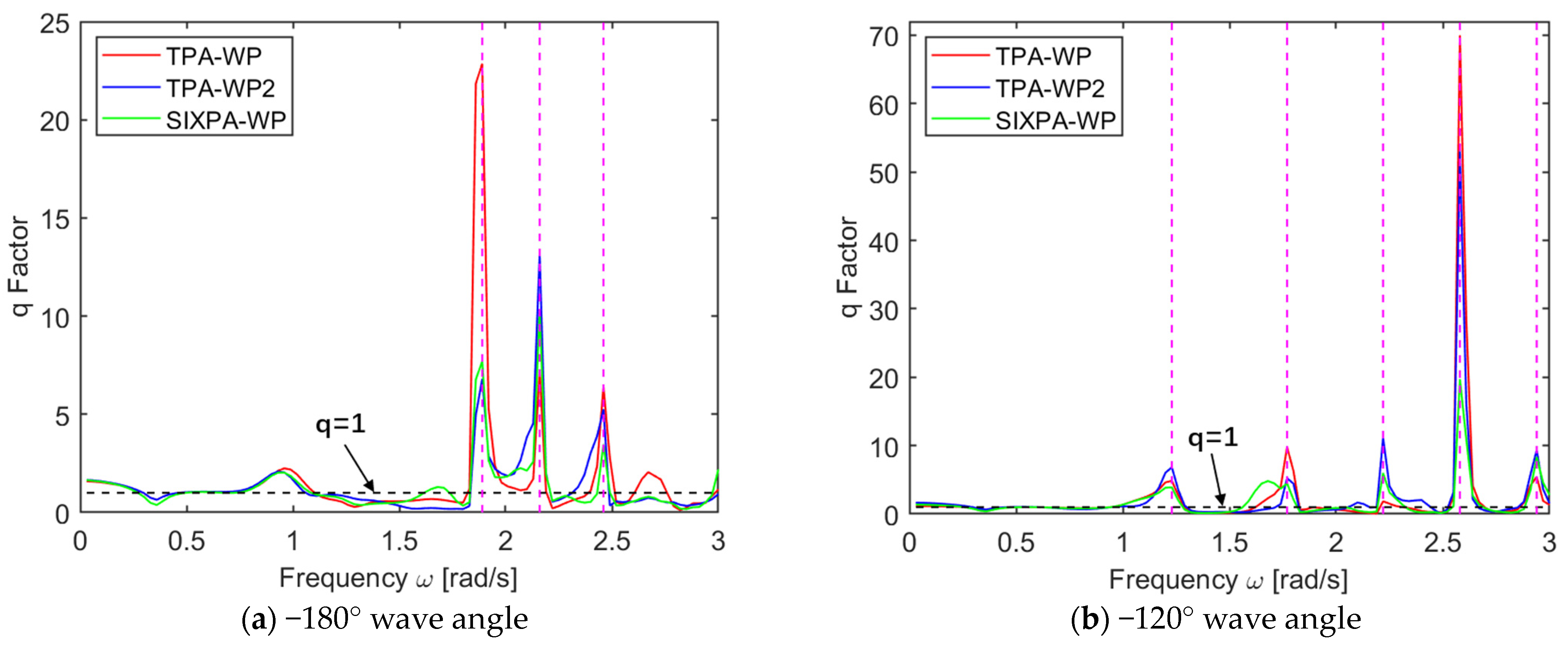
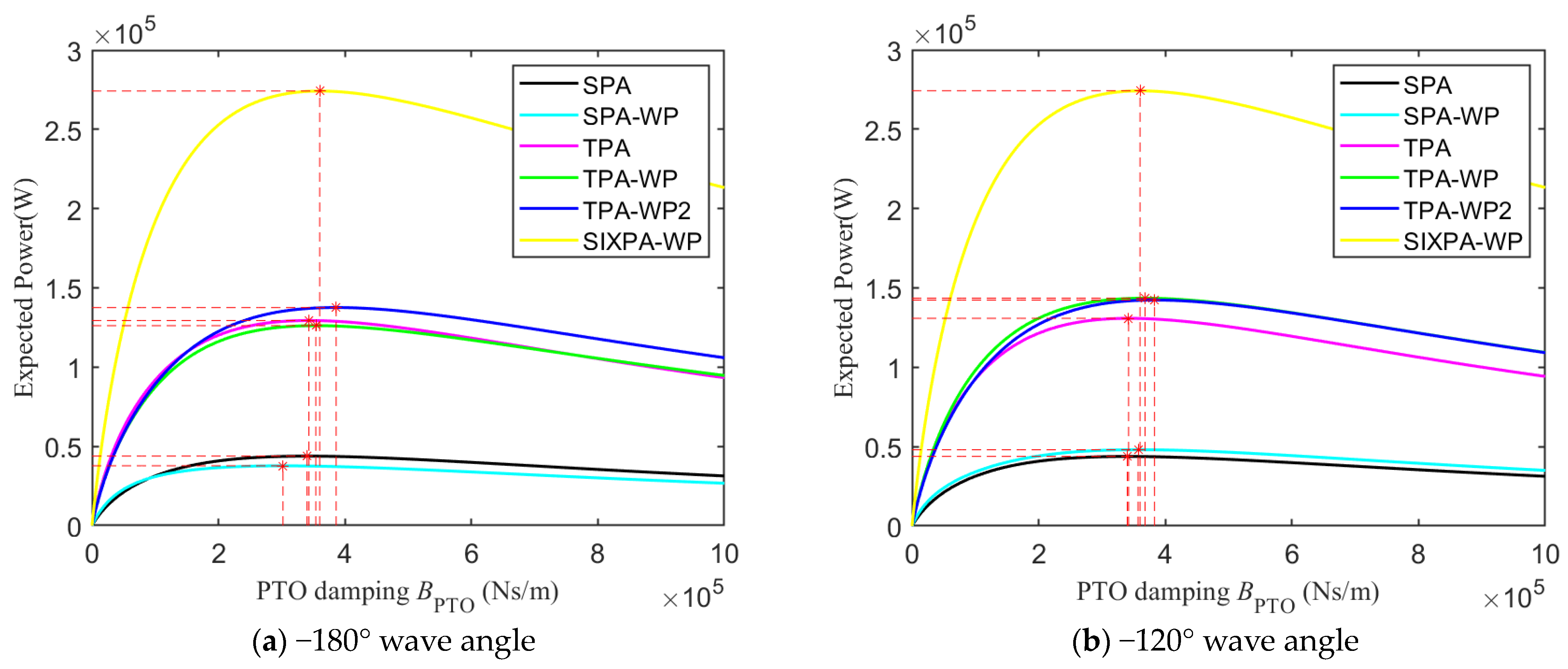
- When considering different arrangements of point-absorber arrays on the floating platform, it is observed that when considering the floating platform, the point-absorber array’s maximum total power generation is minimally affected by the wave angle but offers little improvement over individual point absorbers. When considering a floating platform, the maximum power generation of each model is improved compared to that for individual point absorbers. The arrangement of a single point absorber on the floating platform results in the highest increase in maximum power generation, but it is significantly affected by the angle of waves. On the other hand, both arrangements of three point absorbers exhibit more stable performance. Similarly, the arrangement of six point absorbers is also significantly influenced by the wave angle. Additionally, when considering whether the average performance of point-absorber arrays on a floating platform is superior to that of a single point absorber on the same platform, it was observed that due to the hydrodynamic resonance generated by the array arrangements, multiple peaks occurred in the q factor at the same frequency.
- (5)
- The expected power performance of point absorbers in different arrangements in the South China Sea differs significantly from their performance in the maximum power analysis. While arranging a single point absorber on a floating foundation yields the best peak performance, its stability across all wave frequencies is poor, even dropping below that of a single point absorber. The more point absorbers are arranged in an array, the more stable their performance becomes, demonstrating better adaptability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Added mass matrix [-] | Peak frequency [rad/s] | ||
| Radiation damping matrix [-] | The relative displacement between the platform and the point absorber [m] | ||
| Bpto | Damping coefficient matrix of PTO [-] | Peak factor [-] | |
| Bv | Viscous damping matrix [-] | Abbreviations | |
| C | Hydrostatic stiffness matrix [-] | ||
| d | Water depth [m] | CFD | Computational fluid dynamics |
| D | Capture width [m] | CWR | Capture Width Ratio |
| E | Constraint matrix [-] | DOF | Degree of freedom |
| The force applied to the PTO [N] | PSD | Power Spectral Density | |
| H | Wave height [m] | PTO | Power Take-Off |
| Significant wave height [m] | RAO | Response Amplitude Operator | |
| Kpto | Stiffness matrix of PTO [-] | SIXPA-WP | Six point absorbers combined with floating wind turbine platform |
| Wave number [-] | SPA | Single point absorber | |
| M | Mass matrix [-] | SPA-WP | Single point absorber combined with floating wind turbine platform |
| The average power generation of the Nth point absorber [W] | TPA | Three point absorbers | |
| P | The output power of the point absorber [W] | TPA-WP | Three point absorbers combined with floating wind turbine platform |
| Incident power of the wave per unit width [W] | TPA-WP2 | The second placement scheme for three point absorbers combined with floating wind turbine platform | |
| The expected power [W] | WECs | Wave energy converters | |
References
- Hill, J.S. Hywind Scotland, World’s First Floating Wind Farm, Performing Better than Expected. Available online: https://cleantechnica.com/2018/02/16/hywind-scotland-worlds-first-floating-wind-farm-performing-better-expected/ (accessed on 1 September 2023).
- Idcore. Equinor Officially Opens 88MW Hywind Tampen. Available online: https://renews.biz/87665/equinor-officially-opens-88mw-hywind-tampen/ (accessed on 1 September 2023).
- Floatgen. The First Operational Results Confirm the Excellent Performance of Ideol’s Floater. Available online: https://floatgen.eu/en/actualites/first-operational-results-confirm-excellent-performance-ideols-floater (accessed on 1 September 2023).
- Cobra Group. KOWL: World’s Largest Floating Windfarm Fully Operational. Available online: https://www.principlepower.com/news/kowl-worlds-largest-floating-windfarm-fully-operational (accessed on 1 September 2023).
- Yang, X.; Gao, L. China’s First Deep-Sea Floating Wind Power Platform “Haiyang Guanlan” Was Successfully Connected to the Grid and Put into Operation. Available online: http://finance.people.com.cn/n1/2023/0520/c1004-32690779.html (accessed on 1 September 2023).
- Castro-Santos, L.; Martins, E.; Guedes Soares, C. Cost assessment methodology for combined wind and wave floating offshore renewable energy systems. Renew. Energy 2016, 97, 866–880. [Google Scholar] [CrossRef]
- Slocum, A.; Kluger, J.; Mannai, S. Energy Harvesting and Storage System Stabilized Offshore Wind Turbines. In Proceedings of the 2019 Offshore Energy and Storage Summit (OSES), Brest, France, 10–12 July 2019; pp. 1–6. [Google Scholar]
- Muliawan, M.J.; Karimirad, M.; Moan, T.; Gao, Z. STC (Spar-Torus Combination): A Combined Spar-Type Floating Wind Turbine and Large Point Absorber Floating Wave Energy Converter—Promising and Challenging. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012; American Society of Mechanical Engineers: New York, NY, USA, 2012; pp. 667–676. [Google Scholar]
- Muliawan, M.J.; Karimirad, M.; Gao, Z.; Moan, T. Extreme responses of a combined spar-type floating wind turbine and floating wave energy converter (STC) system with survival modes. Ocean Eng. 2013, 65, 71–82. [Google Scholar] [CrossRef]
- Wan, L.; Gao, Z.; Moan, T.; Lugni, C. Experimental and numerical comparisons of hydrodynamic responses for a combined wind and wave energy converter concept under operational conditions. Renew. Energy 2016, 93, 87–100. [Google Scholar] [CrossRef]
- Wan, L.; Gao, Z.; Moan, T.; Lugni, C. Comparative experimental study of the survivability of a combined wind and wave energy converter in two testing facilities. Ocean Eng. 2016, 111, 82–94. [Google Scholar] [CrossRef]
- Wan, L.; Ren, N.; Zhang, P. Numerical investigation on the dynamic responses of three integrated concepts of offshore wind and wave energy converter. Ocean Eng. 2020, 217, 107896. [Google Scholar] [CrossRef]
- Mitra, A.; Sarkar, S.; Chakraborty, A.; Das, S. Sway vibration control of floating horizontal axis wind turbine by modified spar-torus combination. Ocean Eng. 2021, 219, 108232. [Google Scholar] [CrossRef]
- Karimirad, M.; Koushan, K. WindWEC: Combining wind and wave energy inspired by hywind and wavestar. In Proceedings of the 2016 IEEE International Conference on Renewable Energy Research and Applications (ICRERA), Birmingham, UK, 20–23 November 2016; pp. 96–101. [Google Scholar]
- Li, L.; Gao, Y.; Yuan, Z.; Day, S.; Hu, Z. Dynamic response and power production of a floating integrated wind, wave and tidal energy system. Renew. Energy 2018, 116, 412–422. [Google Scholar] [CrossRef]
- Luan, C.; Michailides, C.; Gao, Z.; Moan, T. Modeling and Analysis of a 5 MW Semi-Submersible Wind Turbine Combined with Three Flap-Type Wave Energy Converters. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; American Society of Mechanical Engineers: New York, NY, USA, 2014. [Google Scholar]
- Michailides, C.; Luan, C.; Gao, Z.; Moan, T. Effect of Flap Type Wave Energy Converters on the Response of a Semi-Submersible Wind Turbine in Operational Conditions. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; American Society of Mechanical Engineers: New York, NY, USA, 2014. [Google Scholar]
- Gao, Z.; Moan, T.; Wan, L.; Michailides, C. Comparative numerical and experimental study of two combined wind and wave energy concepts. J. Ocean Eng. Sci. 2016, 1, 36–51. [Google Scholar] [CrossRef]
- Michailides, C.; Gao, Z.; Moan, T. Experimental study of the functionality of a semisubmersible wind turbine combined with flap-type Wave Energy Converters. Renew. Energy 2016, 93, 675–690. [Google Scholar] [CrossRef]
- Michailides, C.; Gao, Z.; Moan, T. Experimental and numerical study of the response of the offshore combined wind/wave energy concept SFC in extreme environmental conditions. Mar. Struct. 2016, 50, 35–54. [Google Scholar] [CrossRef]
- Chen, W.; Gao, F.; Meng, X.; Chen, B.; Ren, A. W2P: A high-power integrated generation unit for offshore wind power and ocean wave energy. Ocean Eng. 2016, 128, 41–47. [Google Scholar] [CrossRef]
- Fenu, B.; Attanasio, V.; Casalone, P.; Novo, R.; Cervelli, G.; Bonfanti, M.; Sirigu, S.A.; Bracco, G.; Mattiazzo, G. Analysis of a Gyroscopic-Stabilized Floating Offshore Hybrid Wind-Wave Platform. J. Mar. Sci. Eng. 2020, 8, 439. [Google Scholar] [CrossRef]
- Soulard, T.; Babarit, A. Numerical Assessment of the Mean Power Production of a Combined Wind and Wave Energy Platform. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012; American Society of Mechanical Engineers: New York, NY, USA, 2012; pp. 413–423. [Google Scholar]
- Soulard, T.; Babarit, A.; Borgarino, B.; Wyns, M.; Harismendy, M. C-HyP: A Combined Wind and Wave Energy Platform with Balanced Contributions. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Nantes, France, 9–14 June 2013; American Society of Mechanical Engineers: New York, NY, USA, 2013. [Google Scholar]
- Wright, C.; Pakrashi, V.; Murphy, J. Numerical Modelling of a Combined Tension Moored Wind and Wave Energy Convertor. In Proceedings of the European Wave and Tidal Energy Conference (EWTEC) Series 2017, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Ren, N.; Ma, Z.; Shan, B.; Ning, D.; Ou, J. Experimental and numerical study of dynamic responses of a new combined TLP type floating wind turbine and a wave energy converter under operational conditions. Renew. Energy 2020, 151, 966–974. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, L.; Michailides, C.; Wan, L.; Shi, W. Hydrodynamic Response of a Combined Wind–Wave Marine Energy Structure. J. Mar. Sci. Eng. 2020, 8, 253. [Google Scholar] [CrossRef]
- Gaspar, J.F.; Kamarlouei, M.; Thiebaut, F.; Guedes Soares, C. Compensation of a hybrid platform dynamics using wave energy converters in different sea state conditions. Renew. Energy 2021, 177, 871–883. [Google Scholar] [CrossRef]
- Ghafari, H.R.; Ghassemi, H.; He, G. Numerical study of the Wavestar wave energy converter with multi-point-absorber around DeepCwind semisubmersible floating platform. Ocean Eng. 2021, 232, 109177. [Google Scholar] [CrossRef]
- Li, J.; Shi, W.; Zhang, L.; Michailides, C.; Li, X. Wind–Wave Coupling Effect on the Dynamic Response of a Combined Wind–Wave Energy Converter. J. Mar. Sci. Eng. 2021, 9, 1101. [Google Scholar] [CrossRef]
- Si, Y.; Chen, Z.; Zeng, W.; Sun, J.; Zhang, D.; Ma, X.; Qian, P. The influence of power-take-off control on the dynamic response and power output of combined semi-submersible floating wind turbine and point-absorber wave energy converters. Ocean Eng. 2021, 227, 108835. [Google Scholar] [CrossRef]
- Shi, W.; Li, J.; Michailides, C.; Chen, M.; Wang, S.; Li, X. Dynamic Load Effects and Power Performance of an Integrated Wind—Wave Energy System Utilizing an Optimum Torus Wave Energy Converter. J. Mar. Sci. Eng. 2022, 10, 1985. [Google Scholar] [CrossRef]
- Wang, Y.; Shi, W.; Michailides, C.; Wan, L.; Kim, H.; Li, X. WEC shape effect on the motion response and power performance of a combined wind-wave energy converter. Ocean Eng. 2022, 250, 111038. [Google Scholar] [CrossRef]
- Tian, W.; Wang, Y.; Shi, W.; Michailides, C.; Wan, L.; Chen, M. Numerical study of hydrodynamic responses for a combined concept of semisubmersible wind turbine and different layouts of a wave energy converter. Ocean Eng. 2023, 272, 113824. [Google Scholar] [CrossRef]
- Chen, M.; Wang, R.; Xiao, P.; Zhu, L.; Li, F.; Sun, L. Numerical Analysis of a Floating Semi-Submersible Wind Turbine Integrated with a Point Absorber Wave Energy Convertor. In Proceedings of the 30th International Ocean and Polar Engineering Conference, Shanghai, China, 11–16 October 2020. [Google Scholar]
- Zhang, X.; Li, B.; Hu, Z.; Deng, J.; Xiao, P.; Chen, M. Research on Size Optimization of Wave Energy Converters Based on a Floating Wind-Wave Combined Power Generation Platform. Energies 2022, 15, 8681. [Google Scholar] [CrossRef]
- De Andrés, A.; Guanche, R.; Meneses, L.; Vidal, C.; Losada, I.J. Factors that influence array layout on wave energy farms. Ocean. Eng. 2014, 82, 32–41. [Google Scholar] [CrossRef]
- Mercadé Ruiz, P.; Nava, V.; Topper, M.B.; Ruiz Minguela, P.; Ferri, F.; Kofoed, J.P. Layout optimisation of wave energy converter arrays. Energies 2017, 10, 1262. [Google Scholar] [CrossRef]
- Sun, P.; Hu, S.; He, H.; Zheng, S.; Chen, H.; Yang, S.; Ji, Z. Structural optimization on the oscillating-array-buoys for energy-capturing enhancement of a novel floating wave energy converter system. Energy Convers. Manag. 2021, 228, 113693. [Google Scholar] [CrossRef]
- Liu, Y.; Zheng, S.; Liang, H.; Cong, P. Wave interaction and energy absorption from arrays of complex-shaped point absorbers. Phys. Fluids 2022, 34, 097107. [Google Scholar] [CrossRef]
- Zhong, Q.; Yeung, R.W. On optimal energy-extraction performance of arrays of wave-energy converters, with full consideration of wave and multi-body interactions. Ocean Eng. 2022, 250, 110863. [Google Scholar] [CrossRef]
- Chen, M.; Xiao, P.; Zhou, H.; Li, C.B.; Zhang, X. Fully coupled analysis of an integrated floating wind-wave power generation platform in operational sea-states. Front. Energy Res. 2022, 10, 931057. [Google Scholar] [CrossRef]
- Zou, M.; Chen, M.; Zhu, L.; Li, L.; Zhao, W. A constant parameter time domain model for dynamic modelling of multi-body system with strong hydrodynamic interactions. Ocean Eng. 2023, 268, 113376. [Google Scholar] [CrossRef]
- Chen, M.; Xiao, P.; Zhang, Z.; Sun, L.; Li, F. Effects of the end-stop mechanism on the nonlinear dynamics and power generation of a point absorber in regular waves. Ocean Eng. 2021, 242, 110123. [Google Scholar] [CrossRef]
- Hu, J.; Zhou, B.; Vogel, C.; Liu, P.; Willden, R.; Sun, K.; Zang, J.; Geng, J.; Jin, P.; Cui, L.; et al. Optimal design and performance analysis of a hybrid system combing a floating wind platform and wave energy converters. Appl. Energy 2020, 269, 114998. [Google Scholar] [CrossRef]
- Zhou, B.; Hu, J.; Jin, P.; Sun, K.; Li, Y.; Ning, D. Power performance and motion response of a floating wind platform and multiple heaving wave energy converters hybrid system. Energy 2023, 265, 126314. [Google Scholar] [CrossRef]
- Folley, M. Numerical Modelling of Wave Energy Converters: State-of-the-Art Techniques for Single Devices and Arrays; Academic Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Babarit, A. Review on the park effect in arrays of oscillating wave energy converters. Renew. Energy 2013, 58, 68–78. [Google Scholar] [CrossRef]
- Eatock Taylor, R.; Taylor, P.; Stansby, P. A coupled hydrodynamic–structural model of the M4 wave energy converter. J. Fluids Struct. 2016, 63, 77–96. [Google Scholar] [CrossRef]
- GD04-2021; Application Guide for Design and Evaluation of Offshore Structures Environmental Conditions. China Classification Society: Beijing, China, 2021.
- Wen, Y.; Wang, W.; Liu, H.; Mao, L.; Mi, H.; Wang, W.; Zhang, G. A Shape Optimization Method of a Specified Point Absorber Wave Energy Converter for the South China Sea. Energies 2018, 11, 2645. [Google Scholar] [CrossRef]
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4; NREL/TP–5000–60601; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2014.
- Liu, H.; Chen, M.; Han, Z.; Zhou, H.; Li, L. Feasibility Study of a Novel Open Ocean Aquaculture Ship Integrating with a Wind Turbine and an Internal Turret Mooring System. J. Mar. Sci. Eng. 2022, 10, 1729. [Google Scholar] [CrossRef]
- Sun, L.; Zang, J.; Taylor, R.E.; Taylor, P.H.; Chen, M. Sensitivity Analysis of Wave Energy Converters in Short-Crested Waves. In Proceedings of the Thirteenth ISOPE Pacific/Asia Offshore Mechanics Symposium, Jeju, Republic of Korea, 14–17 October 2018. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value | Unit |
|---|---|---|
| Diameter of base columns | 24 | m |
| Diameter of upper columns | 12 | m |
| Length of base columns | 6 | m |
| Length of upper columns | 26 | m |
| Column center to center | 50 | m |
| Operating draft | 20 | m |
| Bracing diameter | 1.6 | m |
| Distance between COG and SWL | 13.46 | m |
| Displacement tonnage | 1.3473 × 104 | t |
| Item | Value | Unit |
|---|---|---|
| Radius | 4 | m |
| Length | 5 | m |
| Operating draft | 3 | m |
| Distance between COG and SWL | 1 | m |
| Displacement tonnage | 1.5457 × 102 | t |
| Model | Number of Point Absorbers | Maximum CWR | Optimal PTO Stiffness (N/m) | Optimal Wave Frequency (rad/s) | |
|---|---|---|---|---|---|
| SPA | 0.4122 | 0 | 1.35 | ||
| SPA-WP | 0.6873 | 0 | 1.29 | ||
| TPA | PA1 | 0.2993 | 0 | 1.29 | |
| PA2 and PA3 | 0.4831 | 0 | 1.44 | ||
| TPA-WP | PA1 | 0.2887 | 0 | 1.29 | |
| PA2 and PA3 | 0.4969 | 0 | 1.38 | ||
| Model | Number of Point Absorbers | Maximum CWR | Optimal PTO Damping Coefficient (Ns/m) | Optimal Wave Frequency (rad/s) | |
|---|---|---|---|---|---|
| SPA | 0.4193 | 5.80 × 104 | 1.35 | ||
| SPA-WP | 0.7633 | 8.50 × 104 | 1.29 | ||
| TPA | PA1 | 0.3044 | 6.50 × 104 | 1.26 | |
| PA2 and PA3 | 0.4787 | 4.50 × 104 | 1.41 | ||
| TPA-WP | PA1 | 0.3634 | 3.07 × 105 | 0.87 | |
| PA2 and PA3 | 0.5017 | 2.19 × 105 | 1.05 | ||
| Model | Maximum Total Power Generation (W) | Optimal PTO Damping Coefficient (Ns/m) | Optimal Wave Frequency (rad/s) |
|---|---|---|---|
| SPA | 6.2417 × 104 | 7.60 × 104 | 1.29 |
| SPA-WP | 1.1666 × 105 | 8.50 × 104 | 1.29 |
| TPA | 1.9231 × 105 | 2.51 × 105 | 0.99 |
| TPA-WP | 2.2623 × 105 | 2.39 × 105 | 0.99 |
| TPA-WP2 | 2.7278 × 105 | 8.40 × 104 | 1.26 |
| SIXPA-WP | 3.8422 × 105 | 2.38 × 105 | 0.99 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, M.; Deng, J.; Yang, Y.; Zhou, H.; Tao, T.; Liu, S.; Sun, L.; Hua, L. Performance Analysis of a Floating Wind–Wave Power Generation Platform Based on the Frequency Domain Model. J. Mar. Sci. Eng. 2024, 12, 206. https://doi.org/10.3390/jmse12020206
Chen M, Deng J, Yang Y, Zhou H, Tao T, Liu S, Sun L, Hua L. Performance Analysis of a Floating Wind–Wave Power Generation Platform Based on the Frequency Domain Model. Journal of Marine Science and Engineering. 2024; 12(2):206. https://doi.org/10.3390/jmse12020206
Chicago/Turabian StyleChen, Mingsheng, Jiang Deng, Yi Yang, Hao Zhou, Tao Tao, Shi Liu, Liang Sun, and Lin Hua. 2024. "Performance Analysis of a Floating Wind–Wave Power Generation Platform Based on the Frequency Domain Model" Journal of Marine Science and Engineering 12, no. 2: 206. https://doi.org/10.3390/jmse12020206
APA StyleChen, M., Deng, J., Yang, Y., Zhou, H., Tao, T., Liu, S., Sun, L., & Hua, L. (2024). Performance Analysis of a Floating Wind–Wave Power Generation Platform Based on the Frequency Domain Model. Journal of Marine Science and Engineering, 12(2), 206. https://doi.org/10.3390/jmse12020206