
Utilizing Machine Learning Tools for Calm Water Resistance Prediction and Design Optimization of a Fast Catamaran Ferry



Abstract
:1. Introduction
2. Background
3. Methodology
3.1. Database Generation of Catamaran Case Study
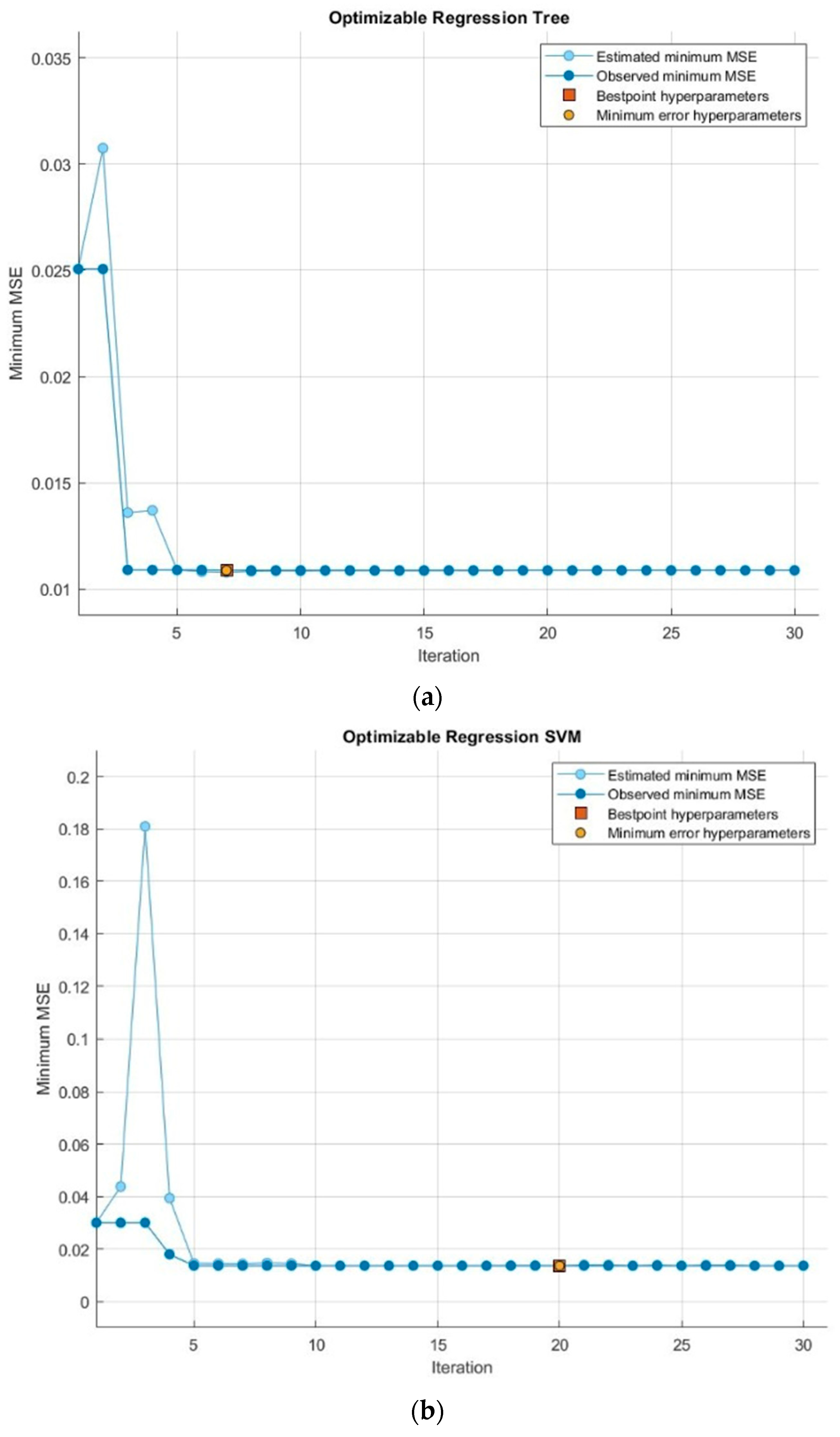
3.2. Machine Learning Training
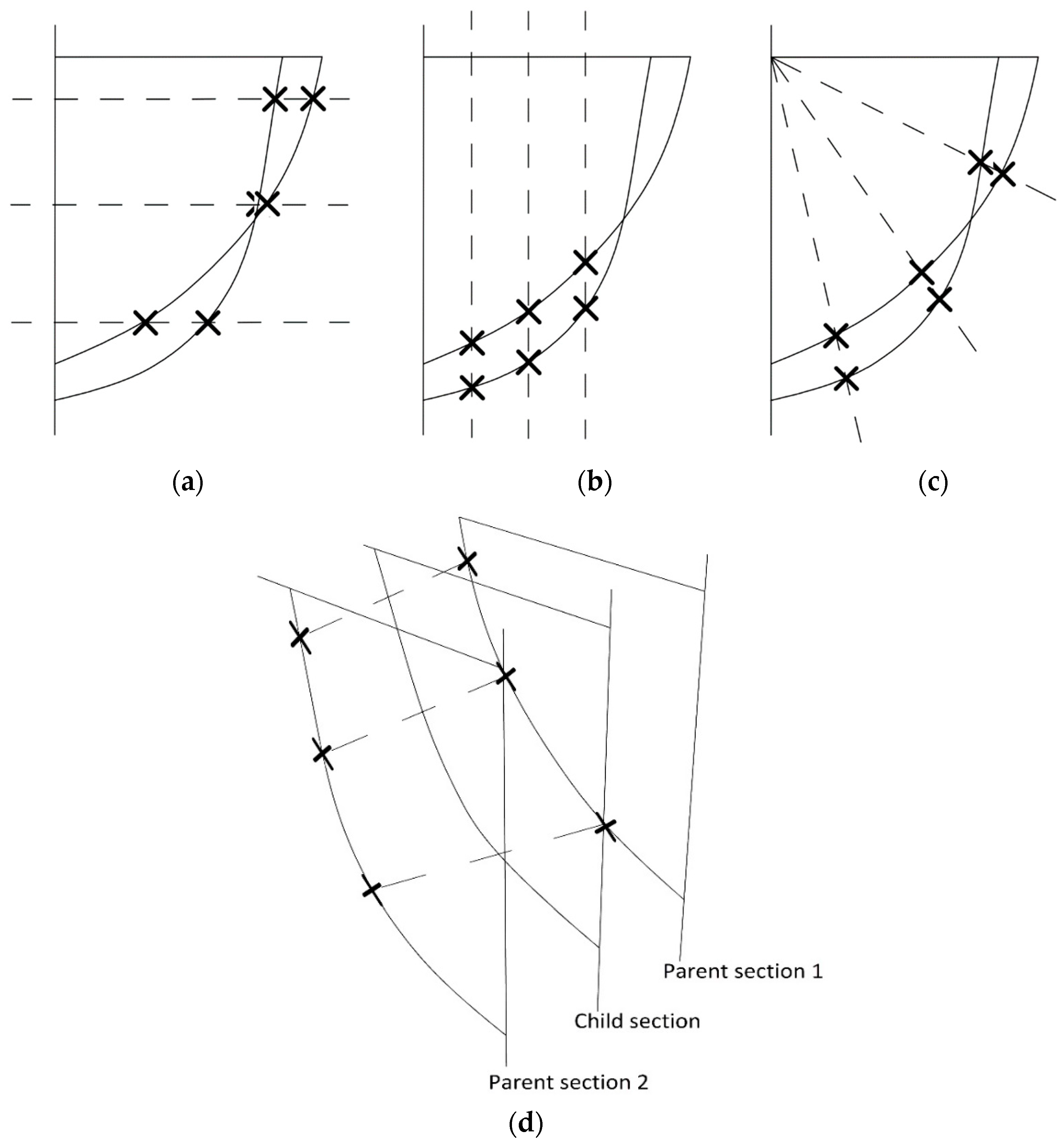
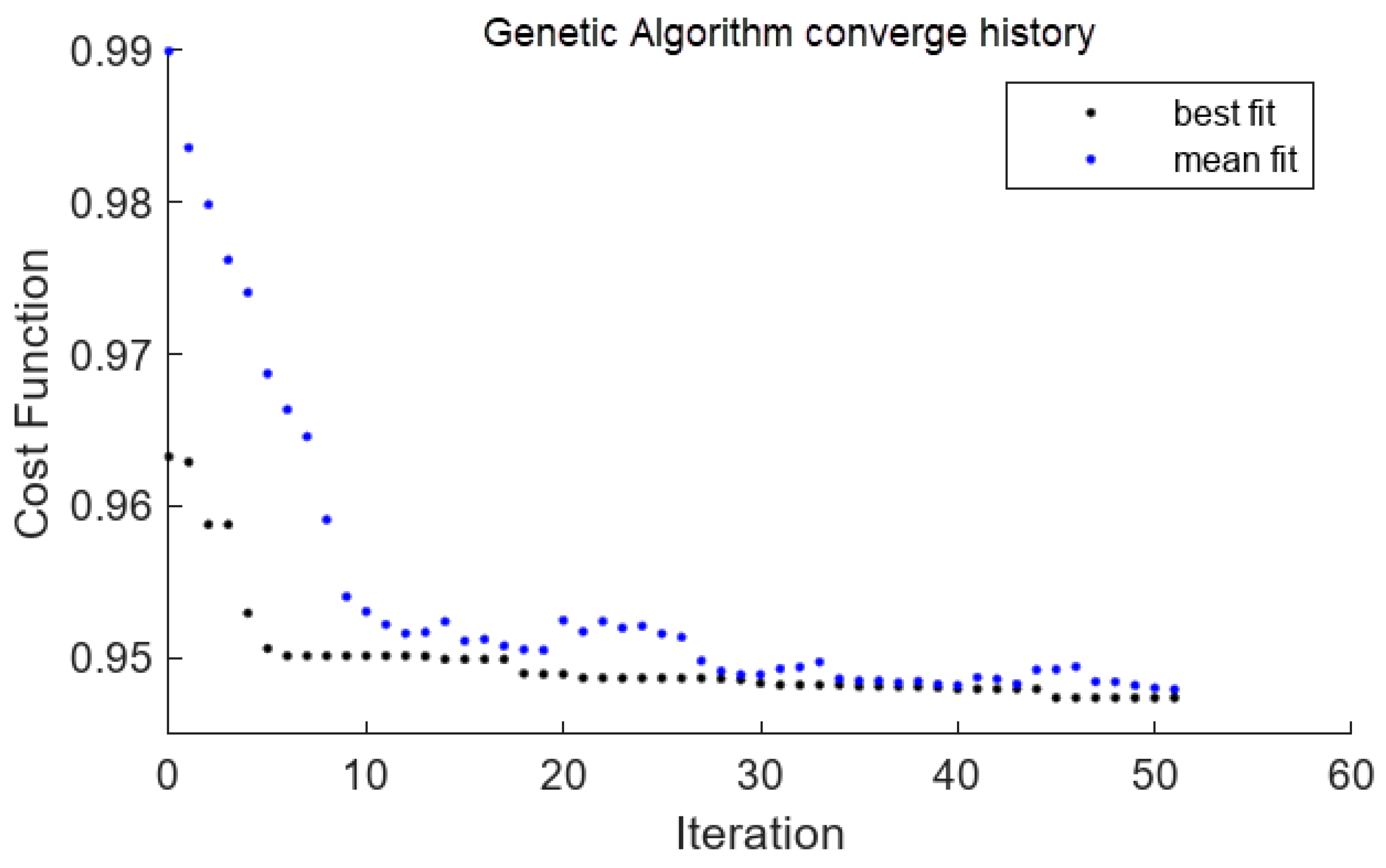
3.3. Genetic Algorithm Optimization
- ▪
- Selection rules select the individuals, called parents, that contribute to the population of the next generation. The selection depends on the individuals’ scores.
- ▪
- Crossover rules combine two parents to form children for the next generation.
- ▪
- Mutation rules apply random changes to individual parents to form children.
4. Results
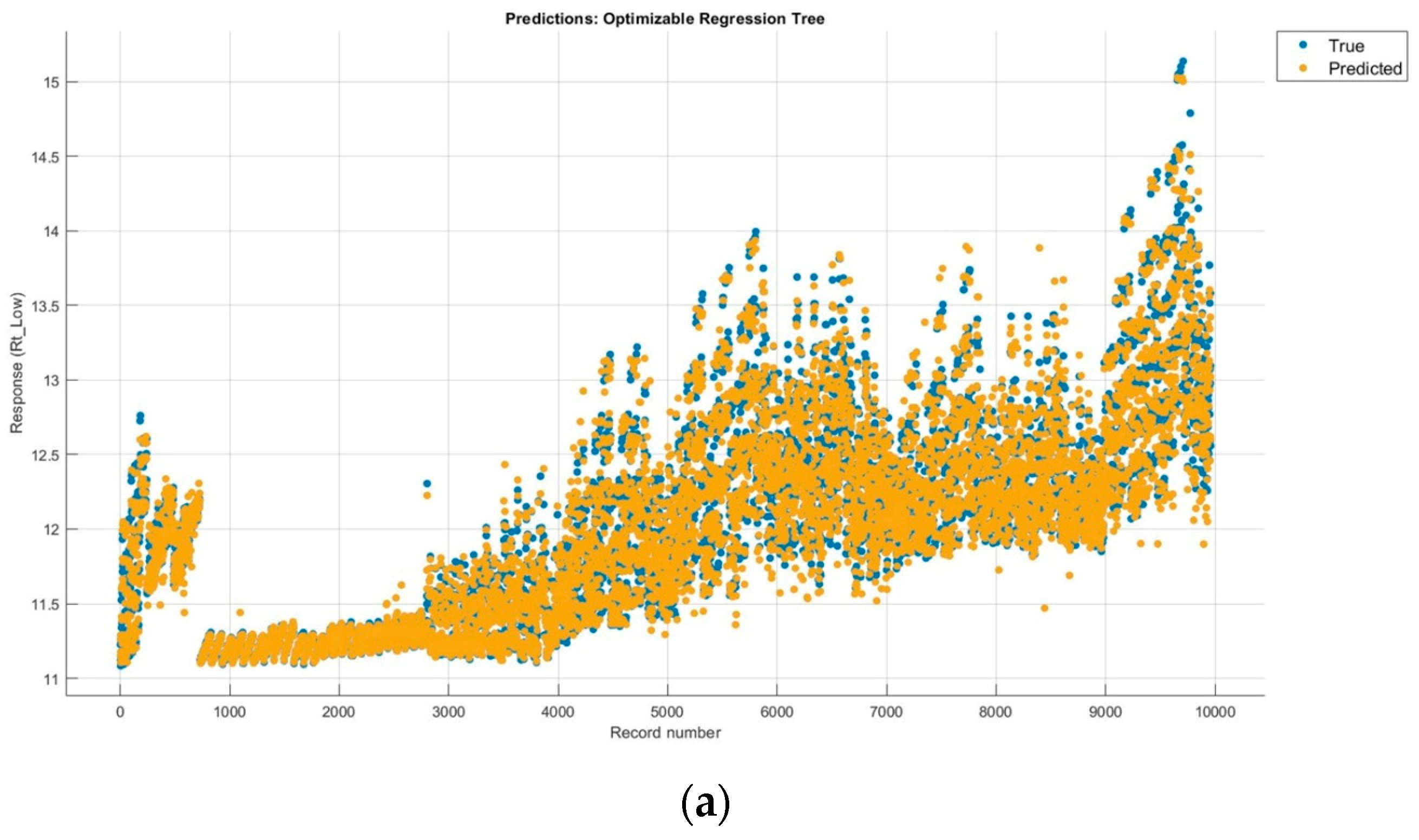
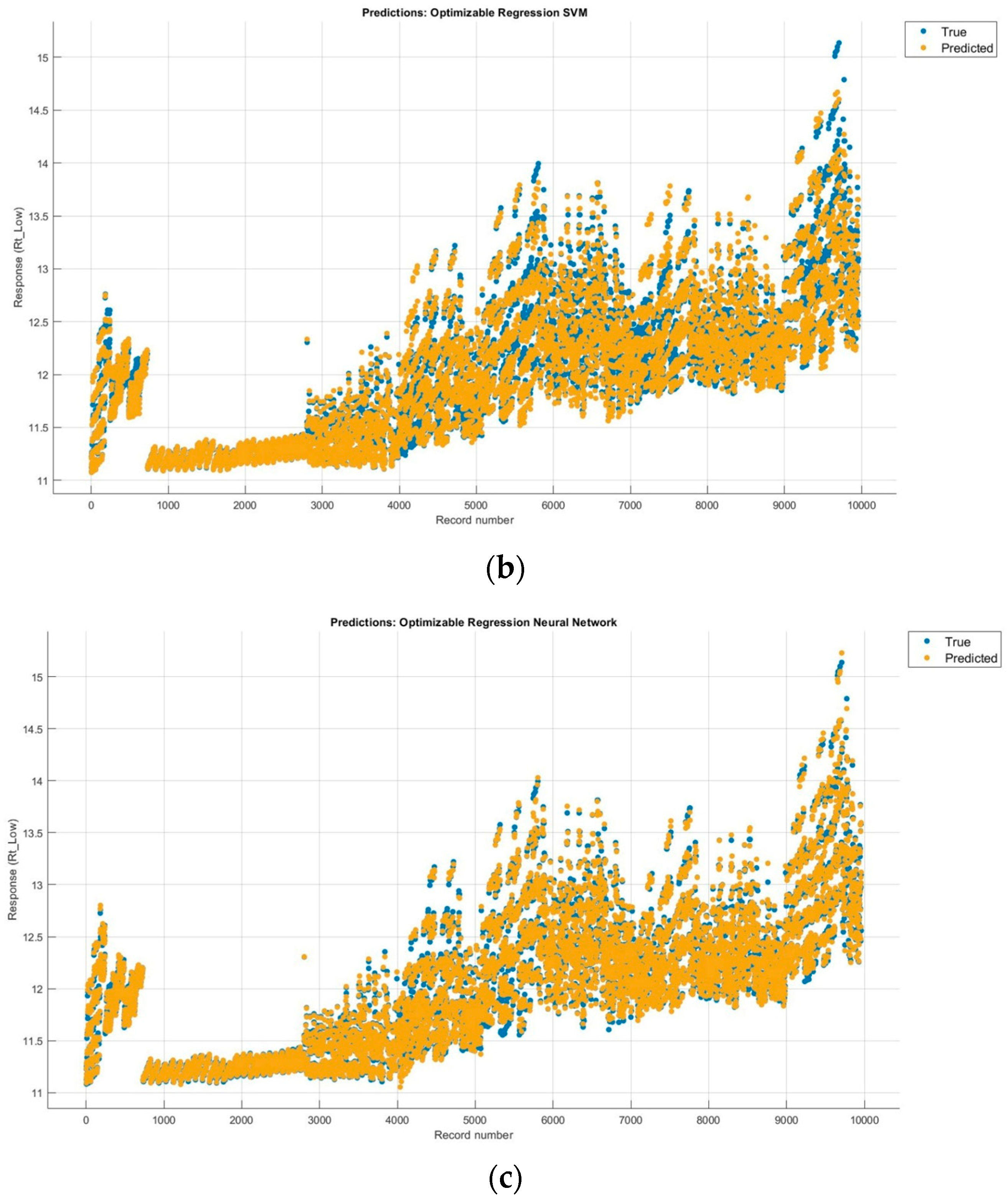
4.1. Regression Model Evaluation
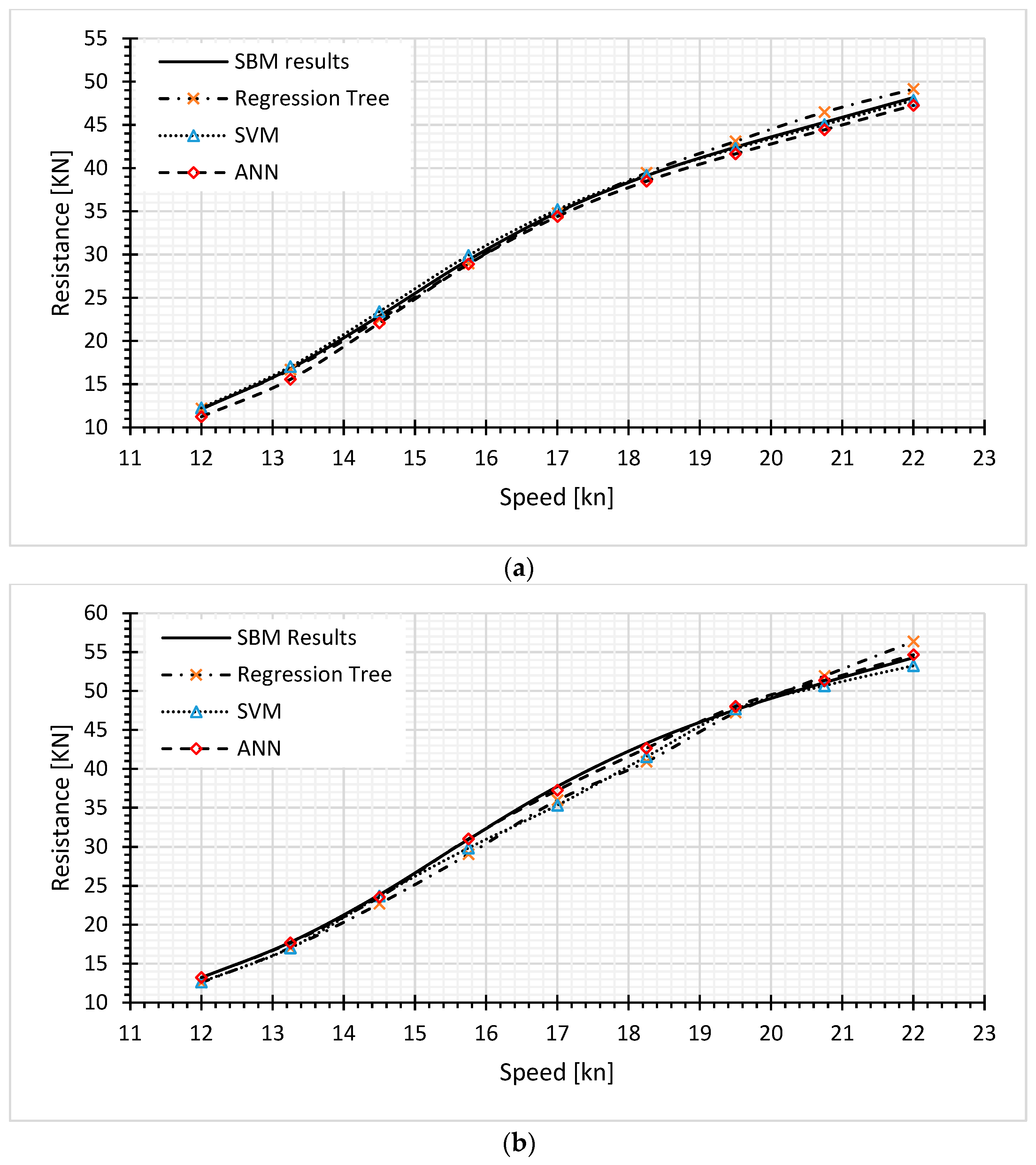
4.1.1. Dataset Test Cases
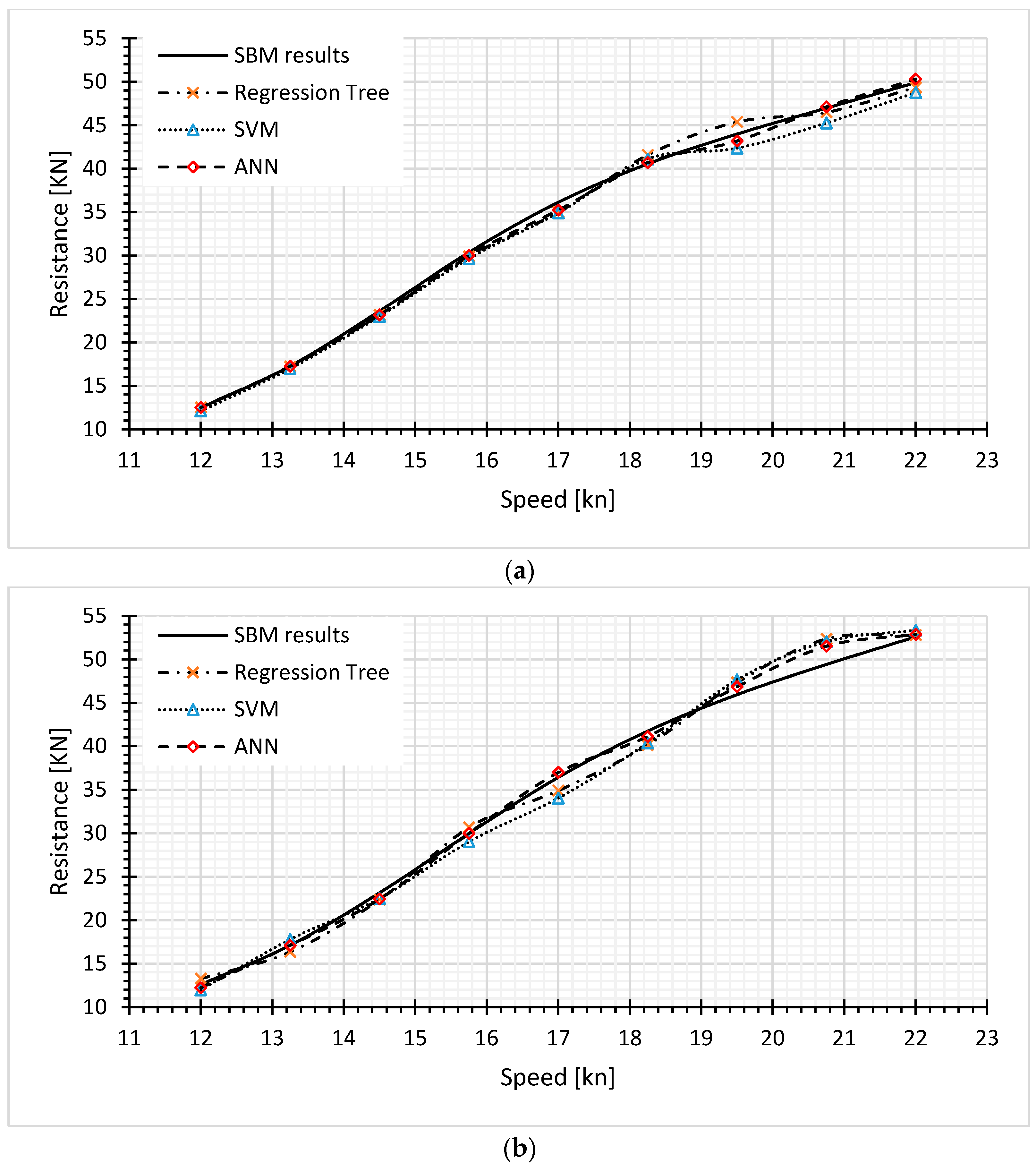
4.1.2. Interpolation Test Cases
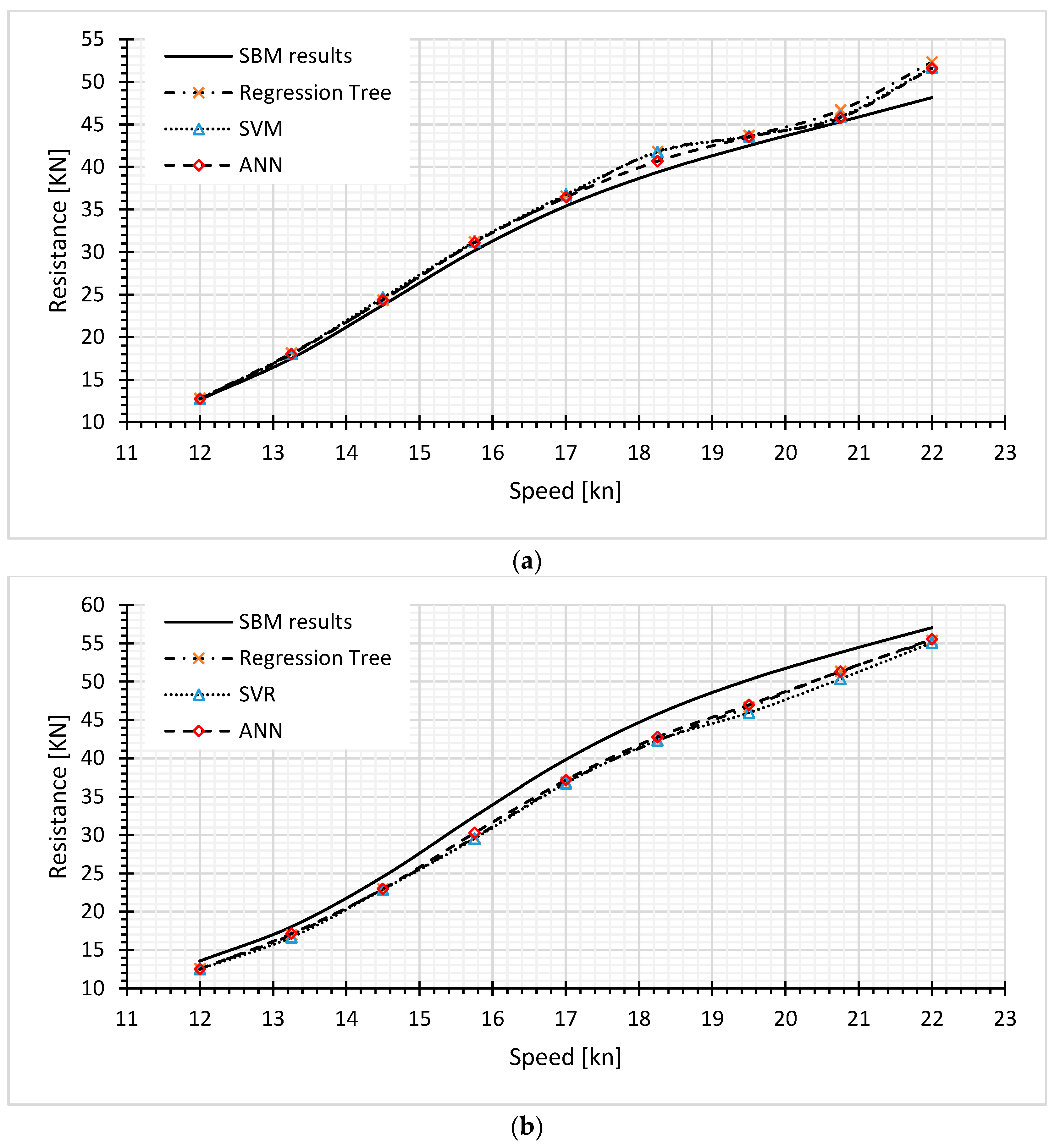
4.1.3. Extrapolation Test Cases
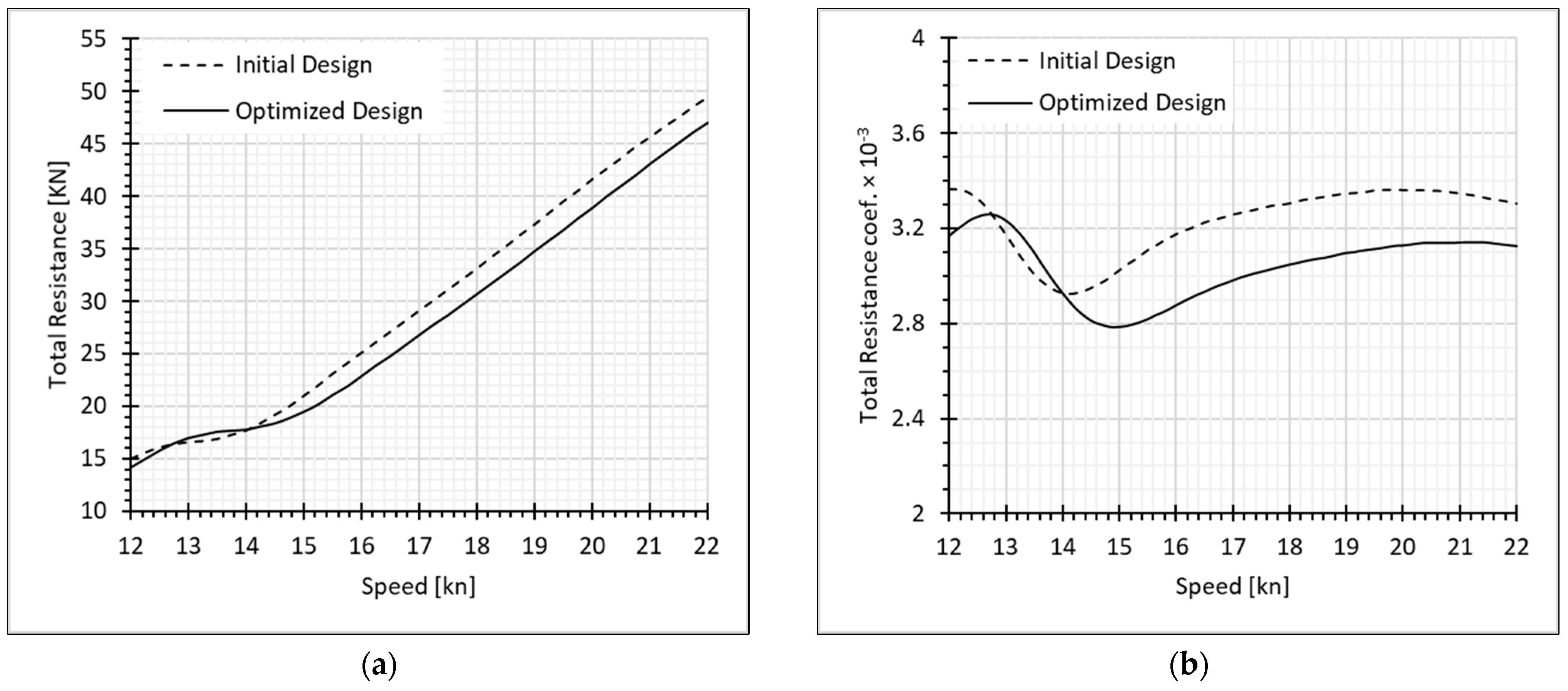
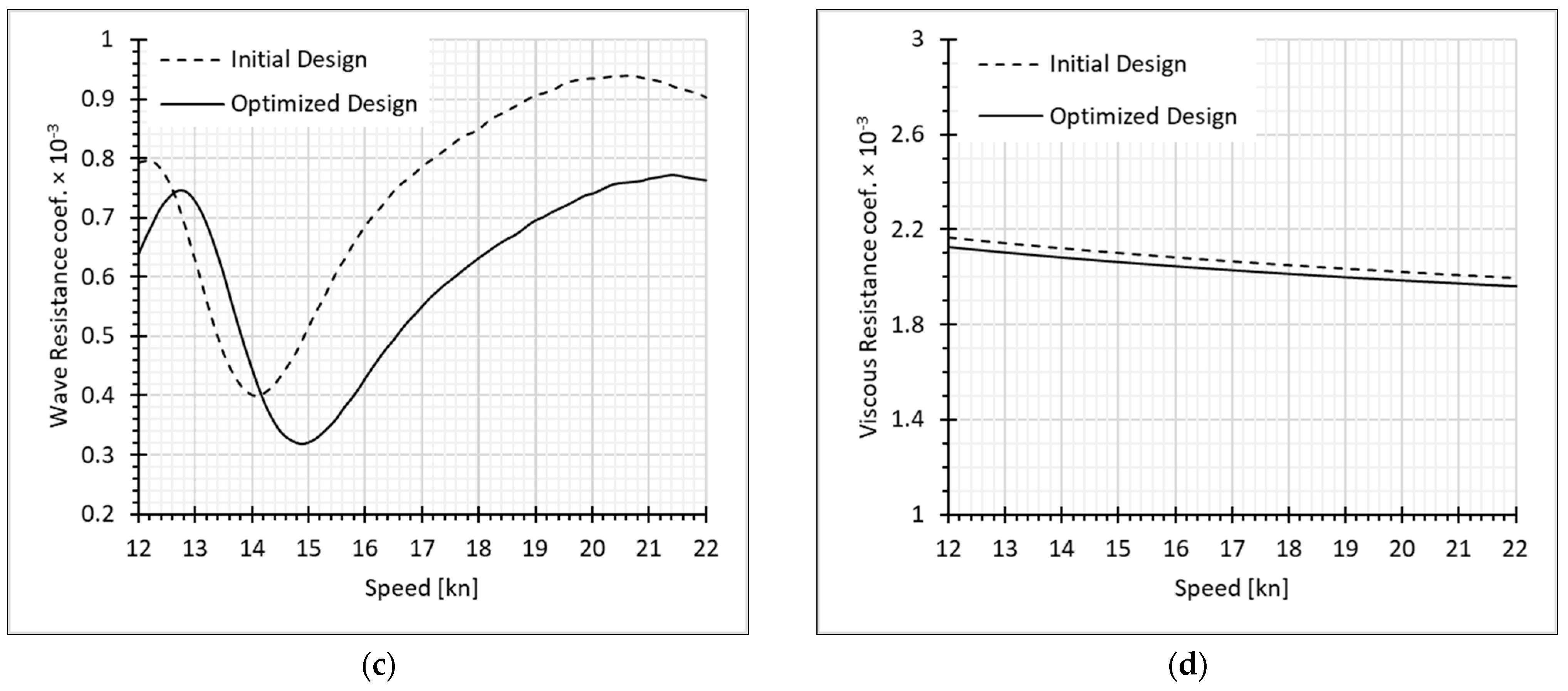
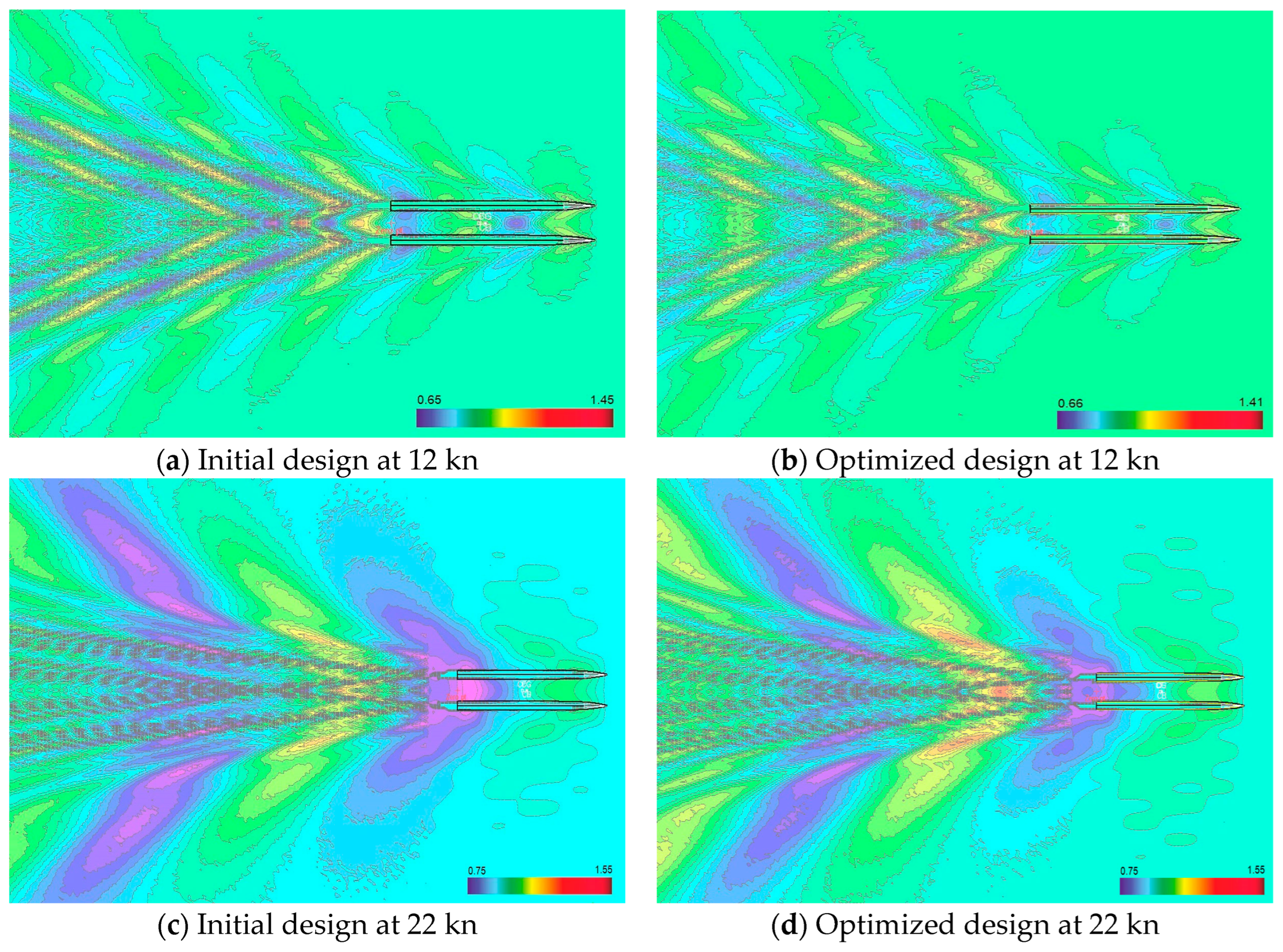
4.2. Genetic Algorithm Optimization
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xing-Kaeding, Y.; Papanikolaou, A. Optimization of the Propulsive Efficiency of a Fast Catamaran. J. Mar. Sci. Eng. 2021, 9, 492. [Google Scholar] [CrossRef]
- Wang, H.; Boulougouris, E.; Theotokatos, G.; Zhou, P.; Priftis, A.; Shi, G. Life Cycle Analysis and Cost Assessment of a Battery Powered Ferry. Ocean Eng. 2021, 241, 110029. [Google Scholar] [CrossRef]
- Sarker, I.H. Machine Learning: Algorithms, Real-World Applications and Research Directions. SN Comput. Sci. 2021, 2, 160. [Google Scholar] [CrossRef]
- Panda, J.P. Machine Learning for Naval Architecture, Ocean and Marine Engineering. J. Mar. Sci. Technol. 2023, 28, 1–26. [Google Scholar] [CrossRef]
- La Ferlita, A.; Qi, Y.; Di Nardo, E.; Moenster, K.; Schellin, T.E.; EL Moctar, O.; Rasewsky, C.; Ciaramella, A. Power Prediction of a 15,000 TEU Containership: Deep-Learning Algorithm Compared to a Physical Model. J. Mar. Sci. Eng. 2023, 11, 1854. [Google Scholar] [CrossRef]
- Cui, H.; Turan, O.; Sayer, P. Learning-Based Ship Design Optimization Approach. CAD Comput. Aided Des. 2012, 44, 186–195. [Google Scholar] [CrossRef]
- Papanikolaou, A.; Xing-Kaeding, Y.; Strobel, J.; Kanellopoulou, A.; Zaraphonitis, G.; Tolo, E. Numerical and Experimental Optimization Study on a Fast, Zero Emission Catamaran. J. Mar. Sci. Eng. 2020, 8, 657. [Google Scholar] [CrossRef]
- Nazemian, A.; Ghadimi, P. Shape Optimisation of Trimaran Ship Hull Using CFD-Based Simulation and Adjoint Solver. Ships Offshore Struct. 2022, 17, 359–373. [Google Scholar] [CrossRef]
- Li, D.; Guan, Y.; Wang, Q.; Chen, Z. Support Vector Regression-Based Multidisciplinary Design Optimization for Ship Design. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering-OMAE, Rio de Janeiro, Brazil, 1–6 July 2012; American Society of Mechanical Engineers: New York, NY, USA, 2012; Volume 1, pp. 77–84. [Google Scholar]
- Fahrnholz, S.F.; Caprace, J.D. A Machine Learning Approach to Improve Sailboat Resistance Prediction. Ocean Eng. 2022, 257, 111642. [Google Scholar] [CrossRef]
- Nazemian, A.; Ghadimi, P. Global Optimization of Trimaran Hull Form to Get Minimum Resistance by Slender Body Method. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 67. [Google Scholar] [CrossRef]
- Margari, V.; Kanellopoulou, A.; Zaraphonitis, G. On the Use of Artificial Neural Networks for the Calm Water Resistance Prediction of MARAD Systematic Series’ Hullforms. Ocean Eng. 2018, 165, 528–537. [Google Scholar] [CrossRef]
- Yao, J.; Han, D. RBF Neural Network Evaluation Model for MDO Design of Ship; International Proceedings of Computer Science and Information Technology (IPCSIT): Singapore, 2012; Volume 47, pp. 309–312. [Google Scholar]
- Radojcic, D.V.; Morabito, M.G.; Simic, A.P.; Zgradic, A.B. Modeling with Regression Analysis and Artificial Neural Networks the Resistance and Trim of Series 50 Experiments with V-Bottom Motor Boats. J. Ship Prod. Des. 2014, 30, 153–174. [Google Scholar] [CrossRef]
- Radojčić, D.V.; Kalajdžić, M.D.; Zgradić, A.B.; Simić, A.P. Resistance and Trim Modeling of a Systematic Planing Hull Series 62 (with 12.5°, 25°, and 30° Deadrise Angles) Using Artificial Neural Networks, Part 2: Mathematical Models. J. Ship Prod. Des. 2017, 33, 257–275. [Google Scholar] [CrossRef]
- Cepowski, T. The Prediction of Ship Added Resistance at the Preliminary Design Stage by the Use of an Artificial Neural Network. Ocean Eng. 2020, 195, 106657. [Google Scholar] [CrossRef]
- Kim, J.H.; Kim, Y.; Lu, W. Prediction of Ice Resistance for Ice-Going Ships in Level Ice Using Artificial Neural Network Technique. Ocean Eng. 2020, 217, 108031. [Google Scholar] [CrossRef]
- Liu, S.; Papanikolaou, A. Regression Analysis of Experimental Data for Added Resistance in Waves of Arbitrary Heading and Development of a Semi-Empirical Formula. Ocean Eng. 2020, 206, 107357. [Google Scholar] [CrossRef]
- Priftis, A.; Boulougouris, E.; Turan, O.; Atzampos, G. Multi-Objective Robust Early Stage Ship Design Optimisation under Uncertainty Utilising Surrogate Models. Ocean Eng. 2020, 197, 106850. [Google Scholar] [CrossRef]
- Shi, G.; Priftis, A.; Xing-Kaeding, Y.; Boulougouris, E.; Papanikolaou, A.D.; Wang, H.; Symonds, G. Numerical Investigation of the Resistance of a Zero-Emission Full-Scale Fast Catamaran in Shallow Water. J. Mar. Sci. Eng. 2021, 9, 563. [Google Scholar] [CrossRef]
- Aung, M.Z.; Nazemian, A.; Boulougouris, E.; Wang, H.; Duman, S.; Xu, X. Establishment of a Design Study for Comprehensive Hydrodynamic Optimisation in the Preliminary Stage of the Ship Design. Ships Offshore Struct. 2023, 18, 1–14. [Google Scholar] [CrossRef]
- Boulougouris, E.; Priftis, A.; Dahle, M.; Tolo, E.; Papanikolaou, A.; Xing-Kaeding, Y.; Jürgenhake, C.; Svendsen, T.; Bjelland, M.; Kanellopoulou, A.; et al. TrAM-Transport: Advanced and Modular. In Proceedings of the 8th Transport Research Arena TRA 2020, Helsinki, Finland, 27–30 April 2020; pp. 1–10. [Google Scholar]
- Couser, P.R.; Wellicome, J.F.; Molland, A.F. An Improved Method for the Theoretical Prediction of the Wave Resistance of Transom-Stern Hulls Using a Slender Body Approach. Int. Shipbuild. Prog. 1999, 45, 331–349. [Google Scholar]
- Maxsurf Modeler, Maxsurf Resistance, and Automation, User Guide. Available online: https://communities.bentley.com (accessed on 22 February 2023).
- Lackenby, H. On the Systematic Geometrical Variation of Ship Forms. Trans. R. Inst. Nav. Archit. 1950, 92, 289–316. [Google Scholar]
- Roh, M.-I.; Lee, K.-Y. Computational Ship Design; Springer: Singapore, 2018; ISBN 978-981-10-4884-5. [Google Scholar]
- Hotelling, H. Analysis of a Complex of Statistical Variables into Principal Components. J. Educ. Psychol. 1933, 24, 417–441. [Google Scholar] [CrossRef]
- Tukey, J.W. John W. Exploratory Data Analysis/John W. Tukey; Addison-Wesley series in behavioral science; Addison-Wesley Pub. Co.: Reading, MA, USA, 1977; ISBN 0201076160. [Google Scholar]
- Zaki, M.J.; Meira, W., Jr. Data Mining and Machine Learning; Cambridge University Press: Cambridge, UK, 2020; ISBN 9781108564175. [Google Scholar]
- Aggarwal, C.C. Data Mining: The Textbook; Springer: Berlin/Heidelberg, Germany, 2015; Volume 1. [Google Scholar]
- Riedmiller, M.; Braun, H. A Direct Adaptive Method for Faster Backpropagation Learning: The RPROP Algorithm. In Proceedings of the IEEE International Conference on Neural Networks, San Francisco, CA, USA, 28 March–1 April 1993; IEEE: Piscataway, NJ, USA, 1993; pp. 586–591. [Google Scholar]
- The Mathworks Inc. Statistics and Machine Learning Toolbox Documentation. Available online: https://www.mathworks.com/help/stats/index.html (accessed on 16 June 2023).
- The MathWorks Inc. MATLAB- Optimization Toolbox, Version 6.2. Available online: http://www.mathworks.com/products/optimization/ (accessed on 22 June 2023).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optimization Parameter | Symbol | Specifications |
|---|---|---|
| Design Variable | Lwl | Waterline length (m) |
| Design Variable | B | Demi hull Beam (m) |
| Design Variable | T | Draft (m) |
| Design Variable | DT | Demi hull transverse distance (m) |
| Free Variable | Cb | Block coefficient |
| Design Variable | Cm | Max section area coefficient |
| Design Variable | LCB (% of Lwl) | Longitudinal Center of Buoyancy |
| Constraint | ∇ | Displacement (ton) |
| Constraint | (DT × 2) + B | Total Beam (m) |
| Specifications | Symbol | Min | Max | Mean | Deviation |
|---|---|---|---|---|---|
| Ship speed [kn] | V | 12 | 22 | 17 | 3.4232 |
| Waterline length (m) | Lwl | 28 | 36 | 32 | 2.2633 |
| Demi hull Beam (m) | B | 2.0985 | 2.2065 | 2.1407 | 0.0352 |
| Draft (m) | T | 1.183 | 1.386 | 1.283 | 0.0518 |
| Demi hull transverse distance (m) | DT | 3.35 | 3.424 | 3.3889 | 0.0239 |
| Block coefficient | Cb | 0.4349 | 0.5062 | 0.4663 | 0.0144 |
| Max section area coefficient | Cm | 0.7091 | 0.7610 | 0.7293 | 0.0135 |
| Longitudinal Center of Buoyancy (% of L) | LCB | 0.5346 | 0.5549 | 0.5463 | 0.0047 |
| Waterplane area (m2) | Aw | 96.235 | 104.339 | 100.488 | 2.9536 |
| Maximum section area (m2) | Ax | 3.923 | 4.153 | 4.094 | 0.0582 |
| Design_ID | Lwl | B | T | Cb | Cm | Cp | LCB | Aw | Ax | Demi_offset | Disp | Cost | Rt_Low | Rt_High |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 29.92 | 2.20 | 1.34 | 0.45 | 0.74 | 0.62 | 0.55 | 100.24 | 4.10 | 3.40 | 79.99 | 1.00 | 12.75 | 51.27 |
| 1 | 29.00 | 2.10 | 1.33 | 0.49 | 0.72 | 0.69 | 0.54 | 97.86 | 4.03 | 3.35 | 79.85 | 0.96 | 11.95 | 50.39 |
| 2 | 31.00 | 2.13 | 1.31 | 0.46 | 0.73 | 0.63 | 0.54 | 102.34 | 4.12 | 3.38 | 79.84 | 0.97 | 12.35 | 50.13 |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| 9775 | 36.00 | 2.09 | 1.19 | 0.50 | 0.74 | 0.71 | 0.54 | 104.21 | 4.15 | 3.4 | 84.65 | 1.03 | 14.33 | 47.63 |
| Optimizable Regression Tree | Optimizable Neural Network | Optimizable SVM |
|---|---|---|
| RMSE: 0.1043 | RMSE: 0.03037 | RMSE: 0.1168 |
| R2: 0.98 | R2: 1 | R2: 0.97 |
| MSE: 0.01088 | MSE: 0.000922 | MSE: 0.01365 |
| MAE: 0.057334 | MAE: 0.020429 | MAE: 0.06614 |
| Minimum leaf size: 3 | Num. of layers: 2 Activation: Sigmoid Lambda: 1.5276 × 10−8 First Layer size: 26 Second Layer size: 77 | Box constraint: 17.0223 Kernel scale: 8.5763 Epsilon: 8.17 × 10−4 Kernel function: Gaussian |
| Test Model 1 | Test Model 2 | |
|---|---|---|
| RT | RMSE: 0.6051 R2: 0.9991 | RMSE: 1.4895 R2: 0.9934 |
| SVM | RMSE: 0.3185 R2: 0.9996 | RMSE: 1.1625 R2: 0.9971 |
| ANN | RMSE: 0.8083 R2: 0.9997 | RMSE: 0.3606 R2: 0.9994 |
| 77.5 ton | 82.5 ton | |
|---|---|---|
| RT | RMSE: 0.7597 R2: 0.9965 | RMSE: 1.4029 R2: 0.9911 |
| SVM | RMSE: 1.0426 R2: 0.9976 | RMSE: 1.4938 R2: 0.9906 |
| ANN | RMSE: 0.4677 R2: 0.9988 | RMSE: 0.8633 R2: 0.9977 |
| 71.5 ton | 88.5 ton | |
|---|---|---|
| RT | RMSE: 1.8147 R2: 0.9964 | RMSE: 2.4631 R2: 0.9975 |
| SVM | RMSE: 1.6215 R2: 0.9965 | RMSE: 2.7815 R2: 0.9975 |
| ANN | RMSE: 1.3860 R2: 0.9968 | RMSE: 2.2180 R2: 0.9983 |
| Optimization Design Variables | Symbol | Min Bound | Max Bound |
|---|---|---|---|
| Waterline length (m) | Lwl | 38 | 41 |
| Demi hull Beam (m) | B | 1.9 | 2.1 |
| Draft (m) | T | 1.1 | 1.15 |
| Demi hull transverse distance (m) | DT | 3.3 | 3.7 |
| Block coefficient | Cb | 0.49 | 0.53 |
| Max section area coefficient | Cm | 0.72 | 0.77 |
| Prismatic coefficient | Cp | 0.66 | 0.71 |
| Longitudinal Center of Buoyancy (% of L) | LCB | 0.51 | 0.56 |
| Objectives & Constraints | Symbol | Min bound | Max bound |
| Resistance at two Ship speeds [kn] | V | 12 | 22 |
| Ship Light Weight (ton) | W | 62.23 | |
| Ship Displacement (ton) | ∆ | 90 ± 1% | |
| Design Study | Symbol | Original Catamaran Resistance [kN] | Optimized Catamaran Resistance [kN] | Improvement % |
|---|---|---|---|---|
| Genetic Algorithm | [kN] | 14.97 | 13.183 | 12.20 |
| [kN] | 48.228 | 44.84 | 7.10 | |
| CF | 1 | 0.905 | 9.5 |
| Ship Principal Parameters | Symbol | Initial Design | Optimized Design |
|---|---|---|---|
| Waterline Length (m) | Lwl | 39.80 | 41.0 |
| Total demi hull Beam (m) | B | 2.000 | 2.078 |
| Draft (m) | T | 1.100 | 1.110 |
| Block coefficient | Cb | 0.515 | 0.504 |
| Midship coefficient | Cm | 0.754 | 0.721 |
| Prismatic coefficient | Cp | 0.683 | 0.699 |
| Demi Hull Distance (m) | DT | 3.500 | 3.326 |
| Longitudinal Centre of Buoyancy (m) | LCB (% of L) | 46.59 | 44.52 |
| Total breath (m) | (DT × 2) + B | 9.00 | 8.73 |
| Displacement (ton) | ∇ | 90.00 | 89.23 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nazemian, A.; Boulougouris, E.; Aung, M.Z. Utilizing Machine Learning Tools for Calm Water Resistance Prediction and Design Optimization of a Fast Catamaran Ferry. J. Mar. Sci. Eng. 2024, 12, 216. https://doi.org/10.3390/jmse12020216
Nazemian A, Boulougouris E, Aung MZ. Utilizing Machine Learning Tools for Calm Water Resistance Prediction and Design Optimization of a Fast Catamaran Ferry. Journal of Marine Science and Engineering. 2024; 12(2):216. https://doi.org/10.3390/jmse12020216
Chicago/Turabian StyleNazemian, Amin, Evangelos Boulougouris, and Myo Zin Aung. 2024. "Utilizing Machine Learning Tools for Calm Water Resistance Prediction and Design Optimization of a Fast Catamaran Ferry" Journal of Marine Science and Engineering 12, no. 2: 216. https://doi.org/10.3390/jmse12020216