
Enhanced Model Predictive Control for Induction Motor Drives in Marine Electric Power Propulsion System



Abstract
1. Introduction
2. Inverter-Fed IM Mathematical Model
3. The Proposed Ranking-Based MPC Method
3.1. Prediction Equation
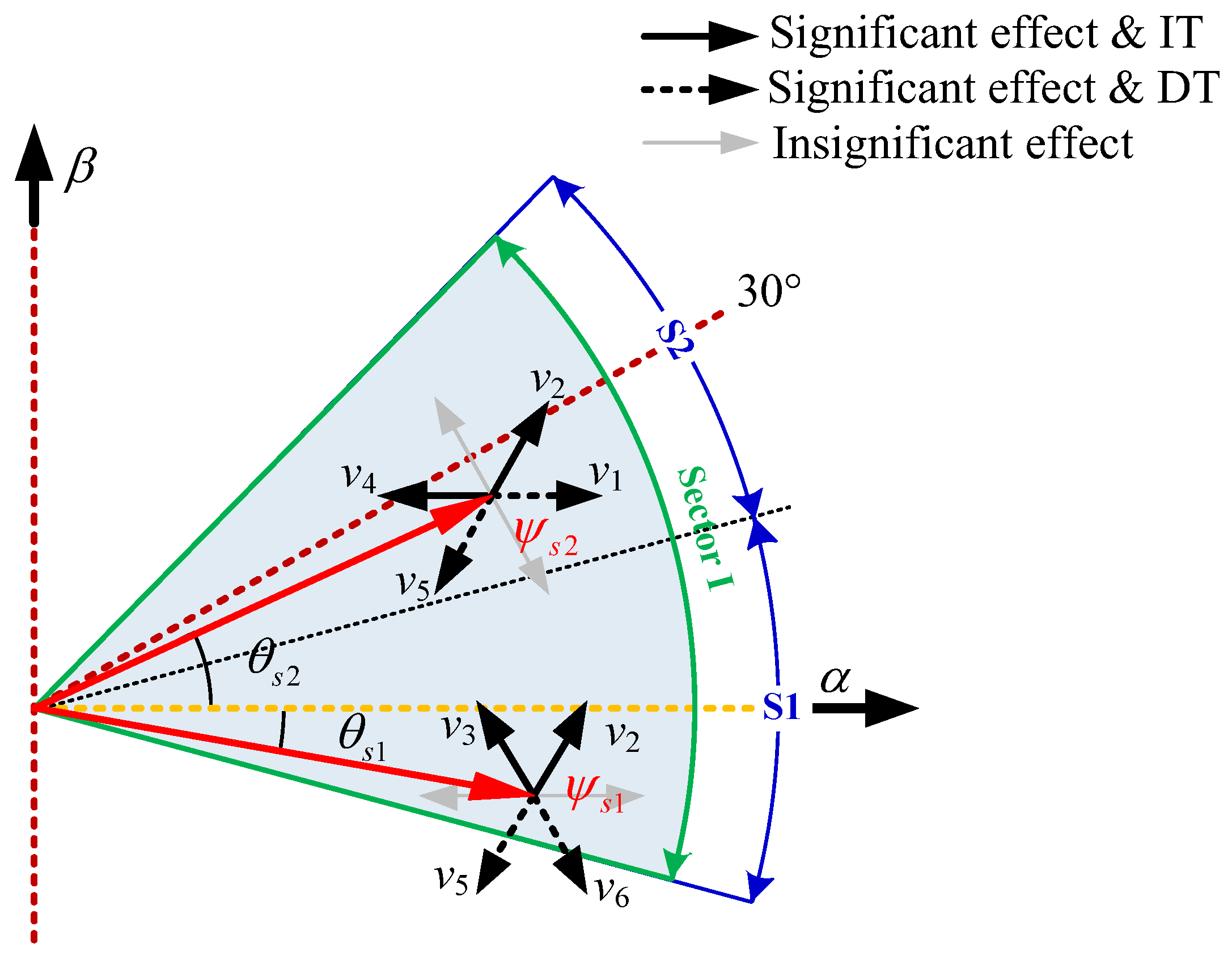
3.2. Control Set Pre-Optimization Principle
3.3. Cost Function Design
3.4. Optimal Solution Decision-Making
3.5. Control Flow Description
- Measure is(k), Udc(k), and ωr(k).
- Estimate is(k + 1) and ψs(k + 1).
- Determine the sector sign, and generate candidate VVs based on the control set pre-optimization principle.
- Predict ψs(k + 2) and Te(k + 2). Calculate the prediction errors of torque and flux. Perform ranking evaluation, and lock the VV of the minimum ranking cost function.
- Judge whether there is a simultaneous optimal situation. If Q = 1, go directly to the next step. Otherwise, solve the normalized error to finalize the optimal VV.
- Select and apply the optimal VV.
4. Results and Discussion
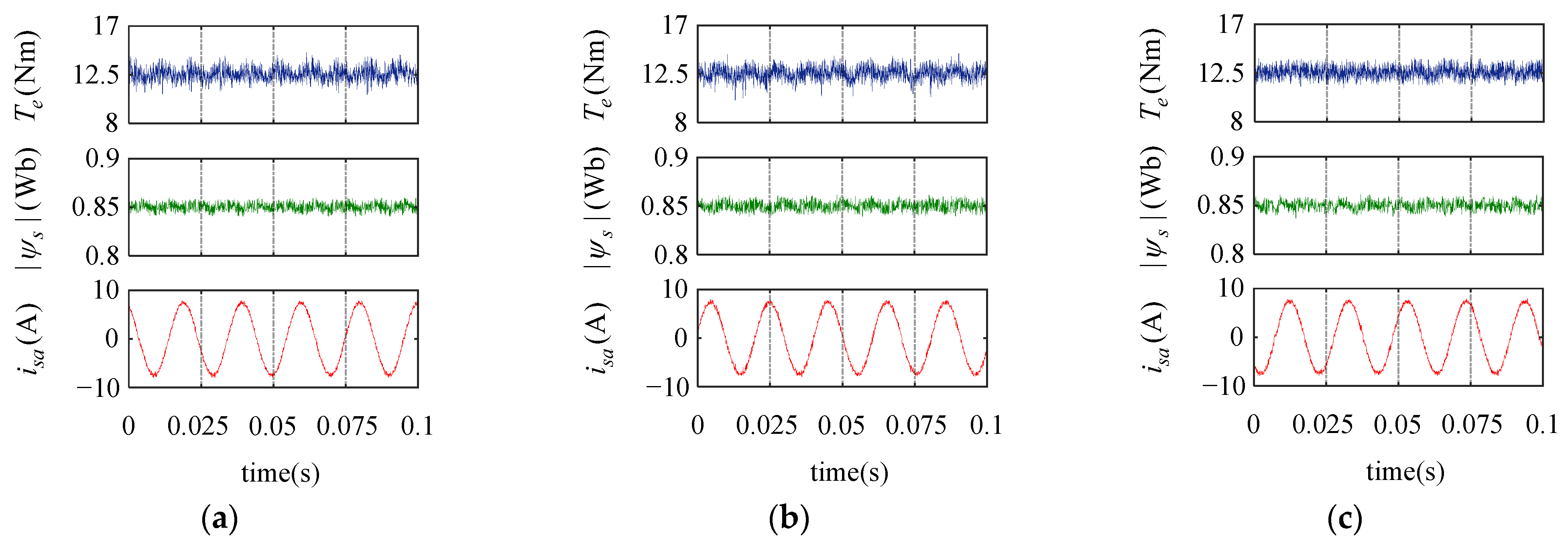
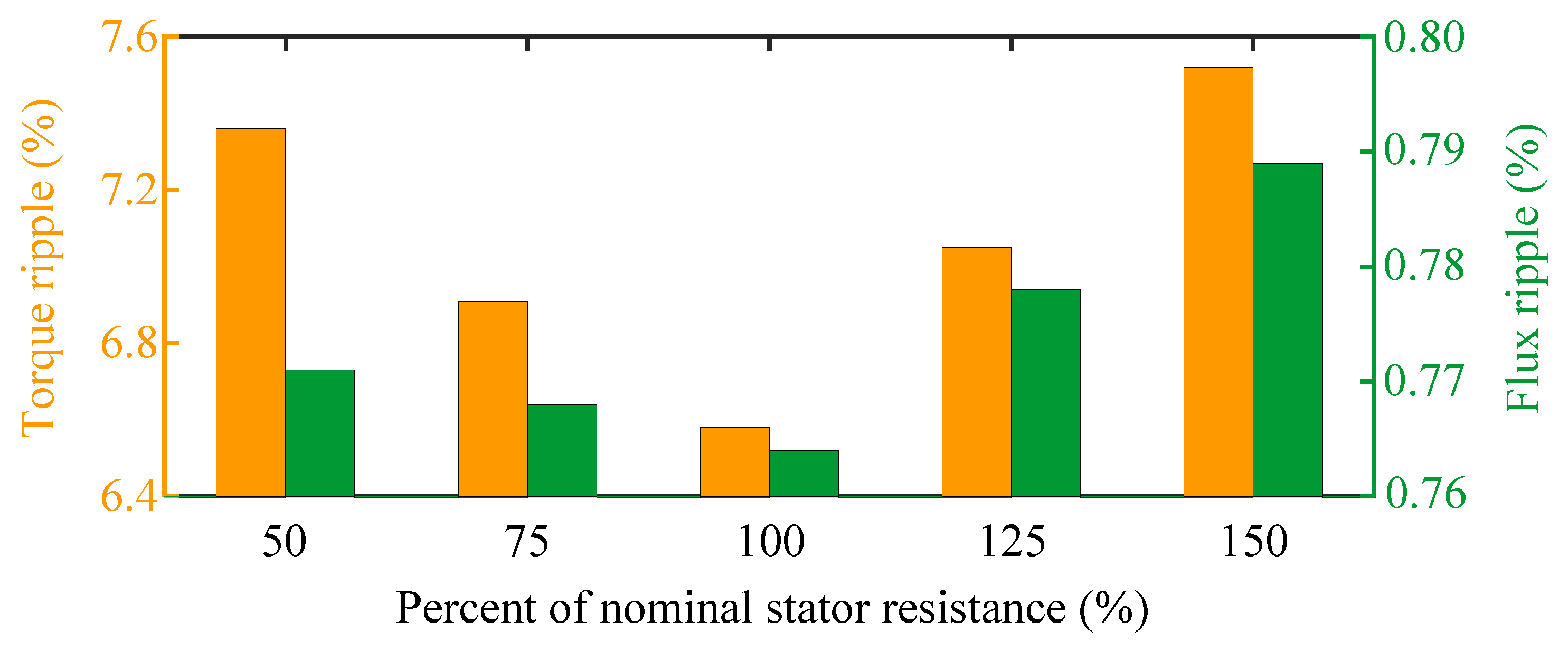
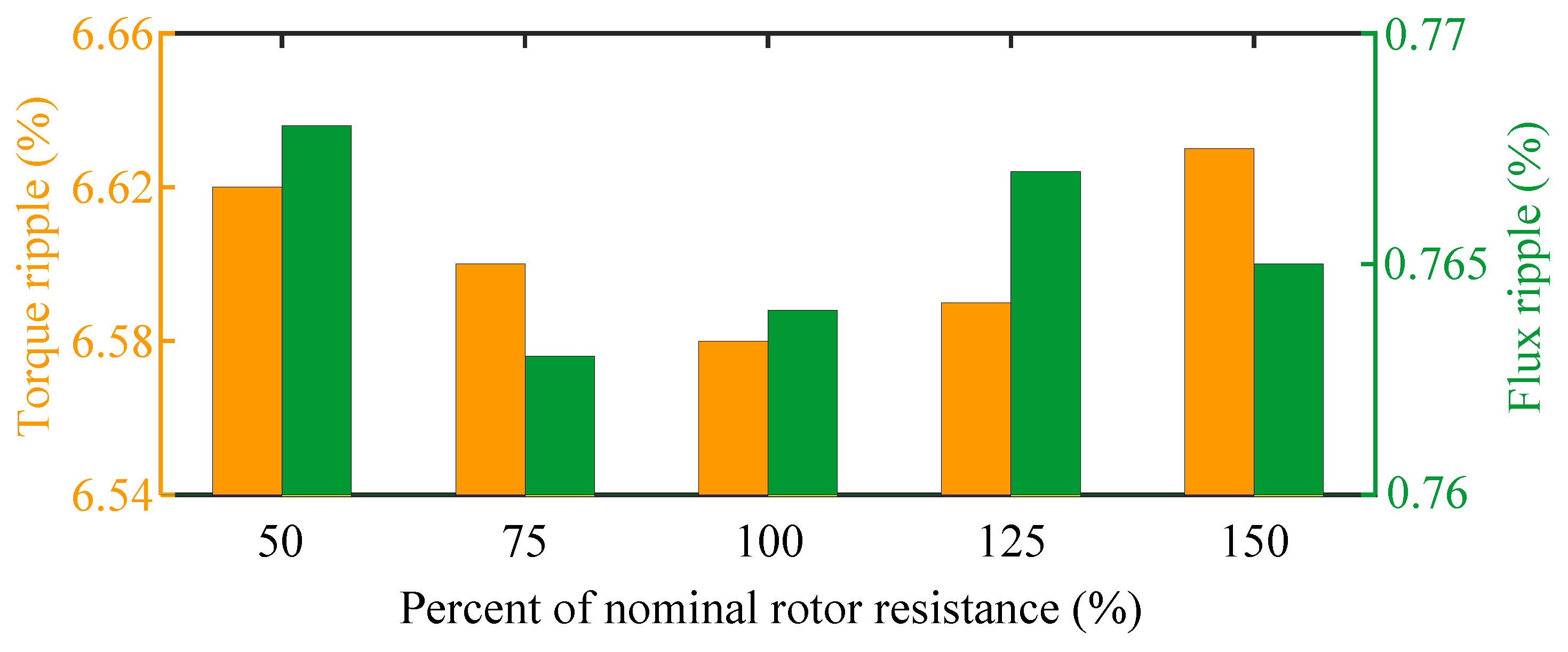
4.1. Simulation Verification
4.2. Analysis of Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Geertsma, R.D.; Negenborn, R.R.; Visser, K.; Hopman, J.J. Design and Control of Hybrid Power and Propulsion Systems for Smart Ships: A Review of Developments. Appl. Energy 2017, 194, 30–54. [Google Scholar] [CrossRef]
- Han, X.; Yao, X.L.; Liao, Y.F. Full Operating Range Optimization Design Method of LLC Resonant Converter in Marine DC Power Supply System. J. Mar. Sci. Eng. 2023, 11, 2142. [Google Scholar] [CrossRef]
- Bai, H.; Yu, B.; Gu, W. Full Research on Position Sensorless Control of RDT Motor Based on Improved SMO with Continuous Hyperbolic Tangent Function and Improved Feedforward PLL. J. Mar. Sci. Eng. 2023, 11, 642. [Google Scholar] [CrossRef]
- Ma, C.W.; Rodríguez, J.; Garcia, C.; De Belie, F. Integration of Reference Current Slope Based Model-Free Predictive Control in Modulated PMSM Drives. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 1407–1421. [Google Scholar] [CrossRef]
- Miranda, H.; Cortés, P.; Yuz, J.I.; Rodríguez, J. Predictive Torque Control of Induction Machines Based on State-Space Models. IEEE Trans. Ind. Electron. 2009, 56, 1916–1924. [Google Scholar] [CrossRef]
- Buja, G.S.; Kazmierkowski, M.P. Direct Torque Control of PWM Inverter-fed AC Motors—A Survey. IEEE Trans. Ind. Electron. 2004, 51, 744–757. [Google Scholar] [CrossRef]
- Davari, S.A.; Khaburi, D.A.; Kennel, R. An Improved FCS–MPC Algorithm for an Induction Motor with an Imposed Optimized Weighting Factor. IEEE Trans. Power Electron. 2012, 27, 1540–1551. [Google Scholar] [CrossRef]
- Gong, C.; Hu, Y.H.; Ma, M.Y.; Gao, J.Q.; Shen, K. Novel Analytical Weighting Factor Tuning Strategy Based on State Normalization and Variable Sensitivity Balance for PMSM FCS-MPTC. IEEE/ASME Trans. Mechatronic. 2020, 25, 1690–1694. [Google Scholar] [CrossRef]
- Novak, M.; Xie, H.T.; Dragicevic, T.; Wang, F.X.; Rodríguez, J.; Blaabjerg, F. Optimal Cost Function Parameter Design in Predictive Torque Control (PTC) Using Artificial Neural Networks (ANN). IEEE Trans. Ind. Electron. 2021, 68, 7309–7319. [Google Scholar] [CrossRef]
- Rojas, C.A.; Rodríguez, J.; Kouro, S.; Villarroel, F. Multiobjective Fuzzy-Decision-Making Predictive Torque Control for an Induction Motor Drive. IEEE Trans. Power Electron. 2017, 32, 6245–6260. [Google Scholar] [CrossRef]
- Geyer, T. Algebraic tuning guidelines for model predictive torque and flux control. IEEE Trans. Ind. Appl. 2018, 51, 4464–4475. [Google Scholar] [CrossRef]
- Muddineni, V.P.; Bonala, A.K.; Sandepudi, S.R. Grey Relational Analysis-Based Objective Function Optimization for Predictive Torque Control of Induction Machine. IEEE Trans. Ind. Appl. 2021, 57, 835–844. [Google Scholar] [CrossRef]
- Yang, A.X.; Lu, Z.G. Multiscalar Model-Based Predictive Torque Control without Weighting Factors and Current Sensors for Induction Motor Drives. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 5785–5797. [Google Scholar] [CrossRef]
- Zhang, X.G.; Yan, K.; Cheng, M. Two-Stage Series Model Predictive Torque Control for PMSM Drives. IEEE Trans. Power Electron. 2021, 36, 12910–12918. [Google Scholar] [CrossRef]
- Wu, X.; Huang, W.X.; Lin, X.G.; Jiang, W.; Zhao, Y.; Zhu, S.F. Direct Torque Control for Induction Motors Based on Minimum Voltage Vector Error. IEEE Trans. Ind. Electron. 2021, 68, 3794–3804. [Google Scholar] [CrossRef]
- Kodumur Meesala, R.E.; Kunisetti, V.P.K.; Kumar Thippiripati, V. Enhanced Predictive Torque Control for Open End Winding Induction Motor Drive Without Weighting Factor Assignment. IEEE Trans. Power Electron. 2019, 34, 503–513. [Google Scholar] [CrossRef]
- Rojas, C.A.; Rodríguez, J.; Villarroel, F.; Espinoza, J.R.; Silva, C.A.; Trincado, M. Predictive Torque and Flux Control Without Weighting Factors. IEEE Trans. Ind. Electron. 2013, 60, 681–690. [Google Scholar] [CrossRef]
- Kusuma, E.; Eswar, K.M.R.; Vinay Kumar, T. An Effective Predictive Torque Control Scheme for PMSM Drive Without Involvement of Weighting Factors. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 2685–2697. [Google Scholar] [CrossRef]
- Norambuena, M.; Rodríguez, J.; Zhang, Z.B.; Wang, F.X.; Garcia, C.; Kennel, R. A Very Simple Strategy for High-Quality Performance of AC Machines Using Model Predictive Control. IEEE Trans. Power Electron. 2019, 34, 794–800. [Google Scholar] [CrossRef]
- Xia, C.L.; Liu, T.; Shi, T.N.; Song, Z.F. A Simplified Finite-Control-Set Model-Predictive Control for Power Converters. IEEE Trans. Ind. Informat. 2014, 10, 991–1002. [Google Scholar]
- Habibullah, M.; Lu, D.D.; Xiao, D.; Rahman, M.F. A Simplified Finite-State Predictive Direct Torque Control for Induction Motor Drive. IEEE Trans. Ind. Electron. 2016, 63, 3964–3975. [Google Scholar] [CrossRef]
- Mamdouh, M.; Abido, M.A. Efficient Predictive Torque Control for Induction Motor Drive. IEEE Trans. Ind. Electron. 2019, 66, 6757–6767. [Google Scholar] [CrossRef]
- Geyer, T. Computationally Efficient Model Predictive Direct Torque Control. IEEE Trans. Power Electron. 2011, 26, 2804–2816. [Google Scholar] [CrossRef]
- Davari, S.A.; Rodríguez, J. Predictive Direct Voltage Control of Induction Motor with Mechanical Model Consideration for Sensorless Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1990–2000. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sector Sign | Candidate Elements (δTe > 0/δTe < 0) | |
|---|---|---|
| Preferred VV (va) | Secondary Preferred VVs (vb, vc) | |
| I | v2/v5 | (v3, v4)/(v6, v1) |
| II | v3/v6 | (v4, v5)/(v1, v2) |
| III | v4/v1 | (v5, v6)/(v2, v3) |
| IV | v5/v2 | (v6, v1)/(v3, v4) |
| V | v6/v3 | (v1, v2)/(v4, v5) |
| VI | v1/v4 | (v2, v3)/(v5, v6) |
| Parameter | Value |
|---|---|
| Rated power PN | 4 kW |
| Rated speed nN | 1440 r/min |
| DC bus voltage Udc | 540 V |
| Rated frequency fn | 50 Hz |
| Stator resistance Rs | 0.922 Ω |
| Rotor resistance Rr | 0.821 Ω |
| Mutual inductance Lm | 0.162 H |
| Stator inductance Ls | 0.170 H |
| Rotor inductance Lr | 0.170 H |
| Number of pole pairs Np | 2 |
| Method | Conventional MPTC | Ranking-Based MPC | Proposed MPC |
|---|---|---|---|
| Torque ripple (Nm) | 0.637385 | 0.621228 | 0.588231 |
| Flux ripple (Wb) | 0.008134 | 0.008668 | 0.008098 |
| Current THD (%) | 9.71 | 8.85 | 8.31 |
| fav (kHz) | 2.85 | 2.73 | 2.39 |
| Method | Conventional MPTC | Ranking-Based MPC | Proposed MPC |
|---|---|---|---|
| Number of candidates | 7 | 7 | 4 |
| Number of VVs sorted | 0 | 14 | 8 |
| Weighting factors | Yes | No | No |
| Execution time | 26.76 μs | 32.46 μs | 22.88 μs |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, T.; Yao, X.; Kou, J. Enhanced Model Predictive Control for Induction Motor Drives in Marine Electric Power Propulsion System. J. Mar. Sci. Eng. 2024, 12, 378. https://doi.org/10.3390/jmse12030378
Liu T, Yao X, Kou J. Enhanced Model Predictive Control for Induction Motor Drives in Marine Electric Power Propulsion System. Journal of Marine Science and Engineering. 2024; 12(3):378. https://doi.org/10.3390/jmse12030378
Chicago/Turabian StyleLiu, Tongzhen, Xuliang Yao, and Jiabao Kou. 2024. "Enhanced Model Predictive Control for Induction Motor Drives in Marine Electric Power Propulsion System" Journal of Marine Science and Engineering 12, no. 3: 378. https://doi.org/10.3390/jmse12030378
APA StyleLiu, T., Yao, X., & Kou, J. (2024). Enhanced Model Predictive Control for Induction Motor Drives in Marine Electric Power Propulsion System. Journal of Marine Science and Engineering, 12(3), 378. https://doi.org/10.3390/jmse12030378