
Load Assessment Method for Multi-Layer Oceanographic Winch with Synthetic Fibre Ropes Based on Non-Rotation Symmetric Cylindrical Model


Abstract
1. Introduction
2. Methods and Models
2.1. Load Assessment Methods
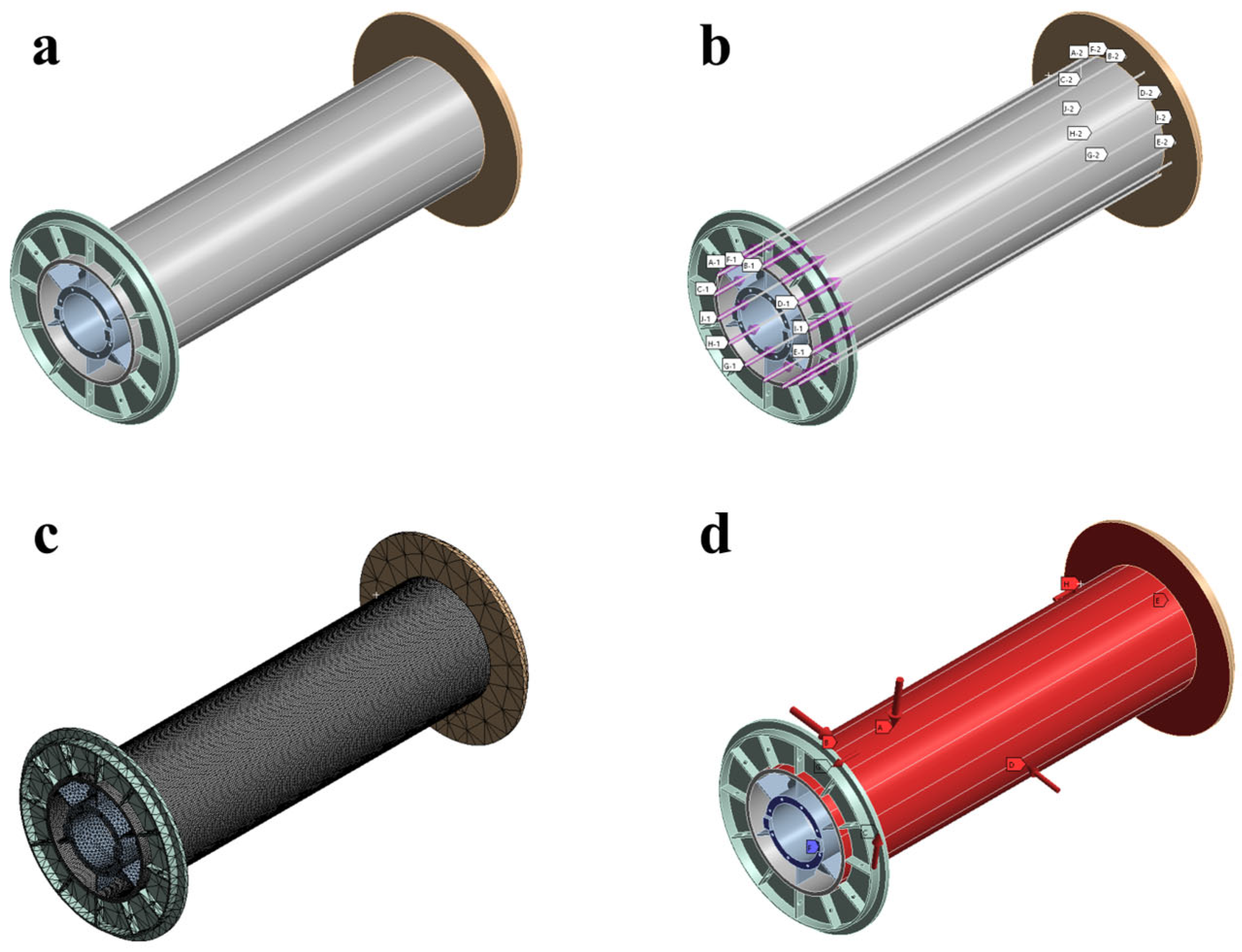
2.2. Non-Rotation Symmetric Model
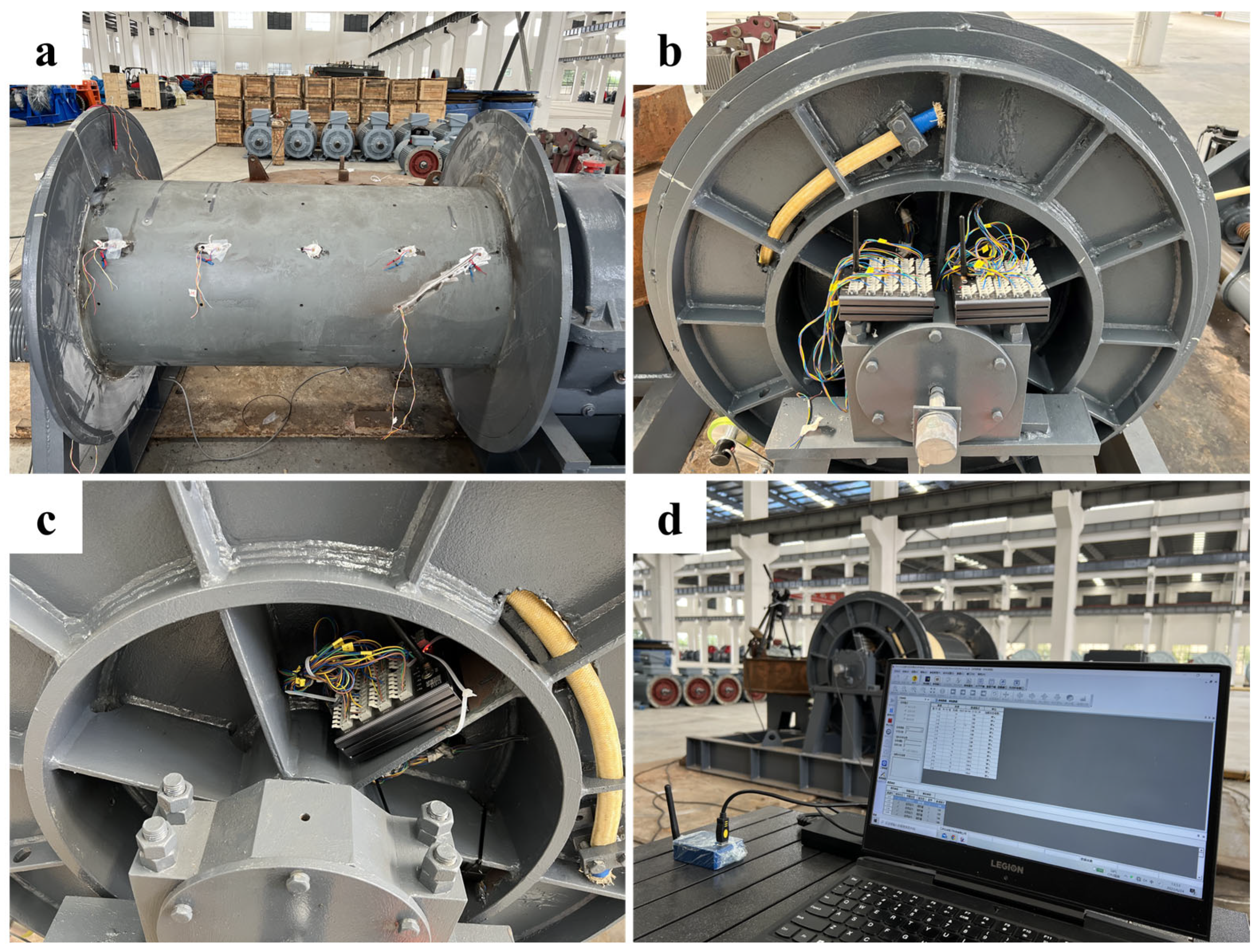
3. Experimental Work
3.1. Experimental Description
3.2. Finite Element Analysis Setup
4. Results
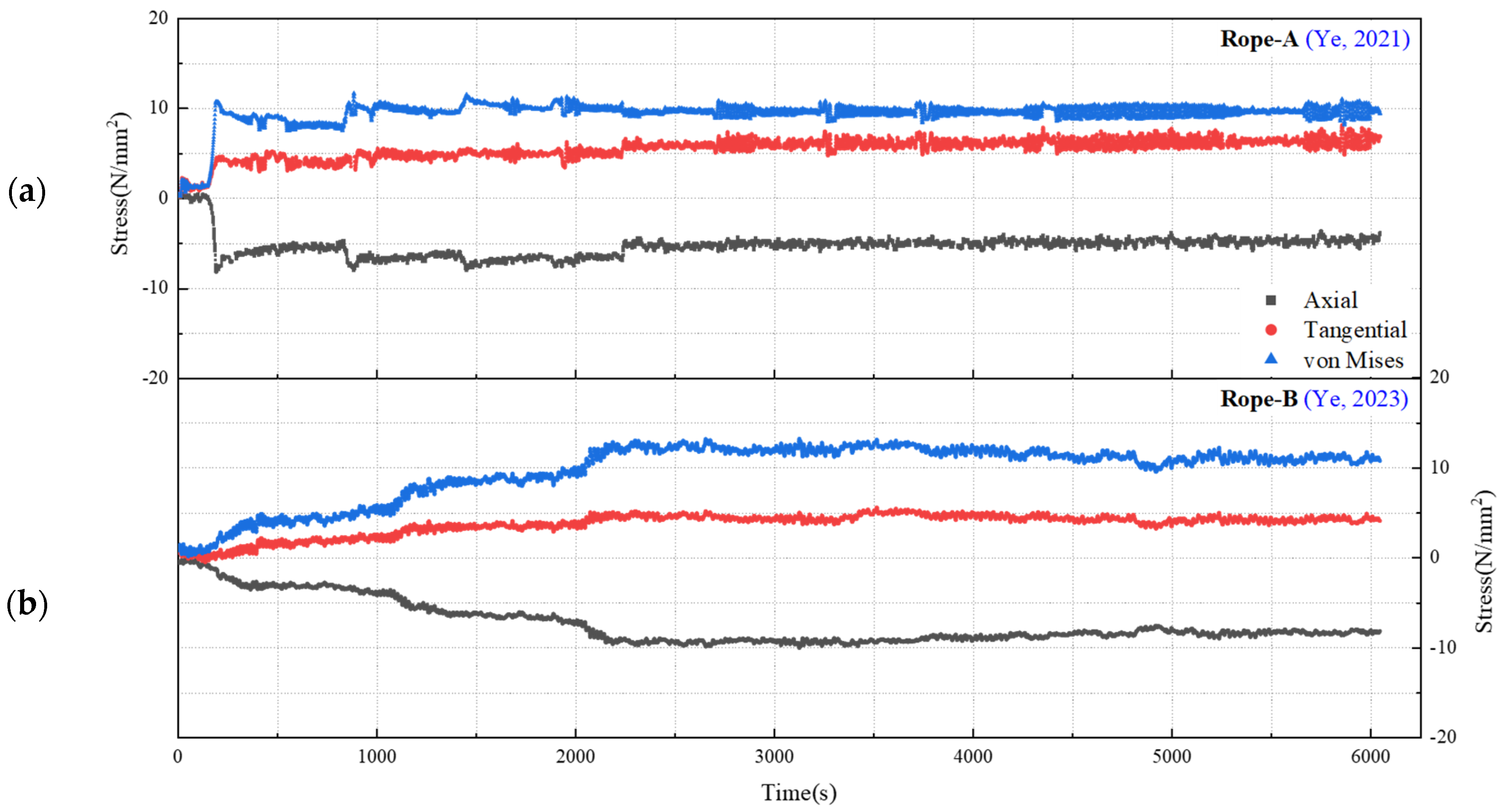
4.1. Experimental Results
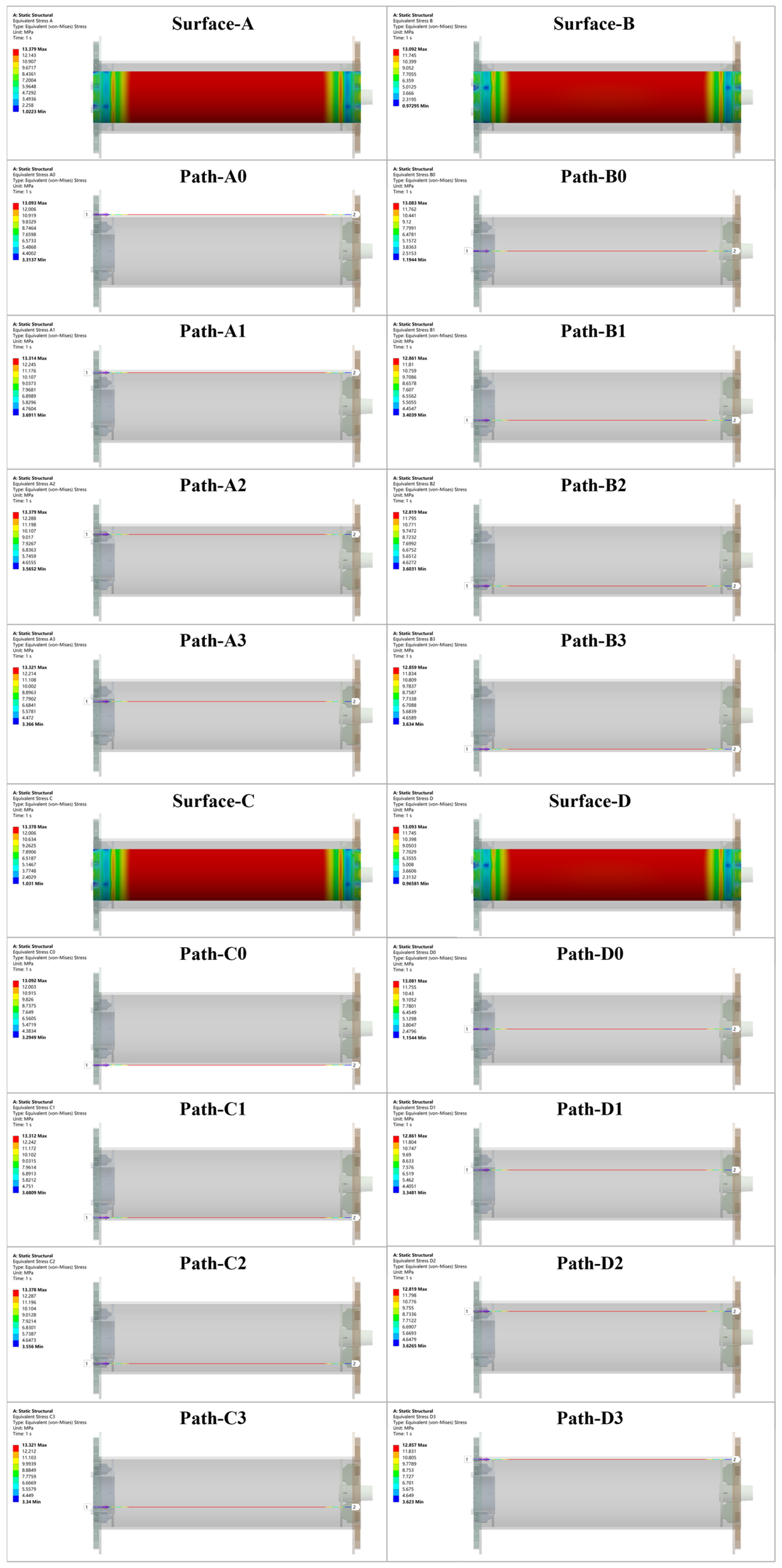
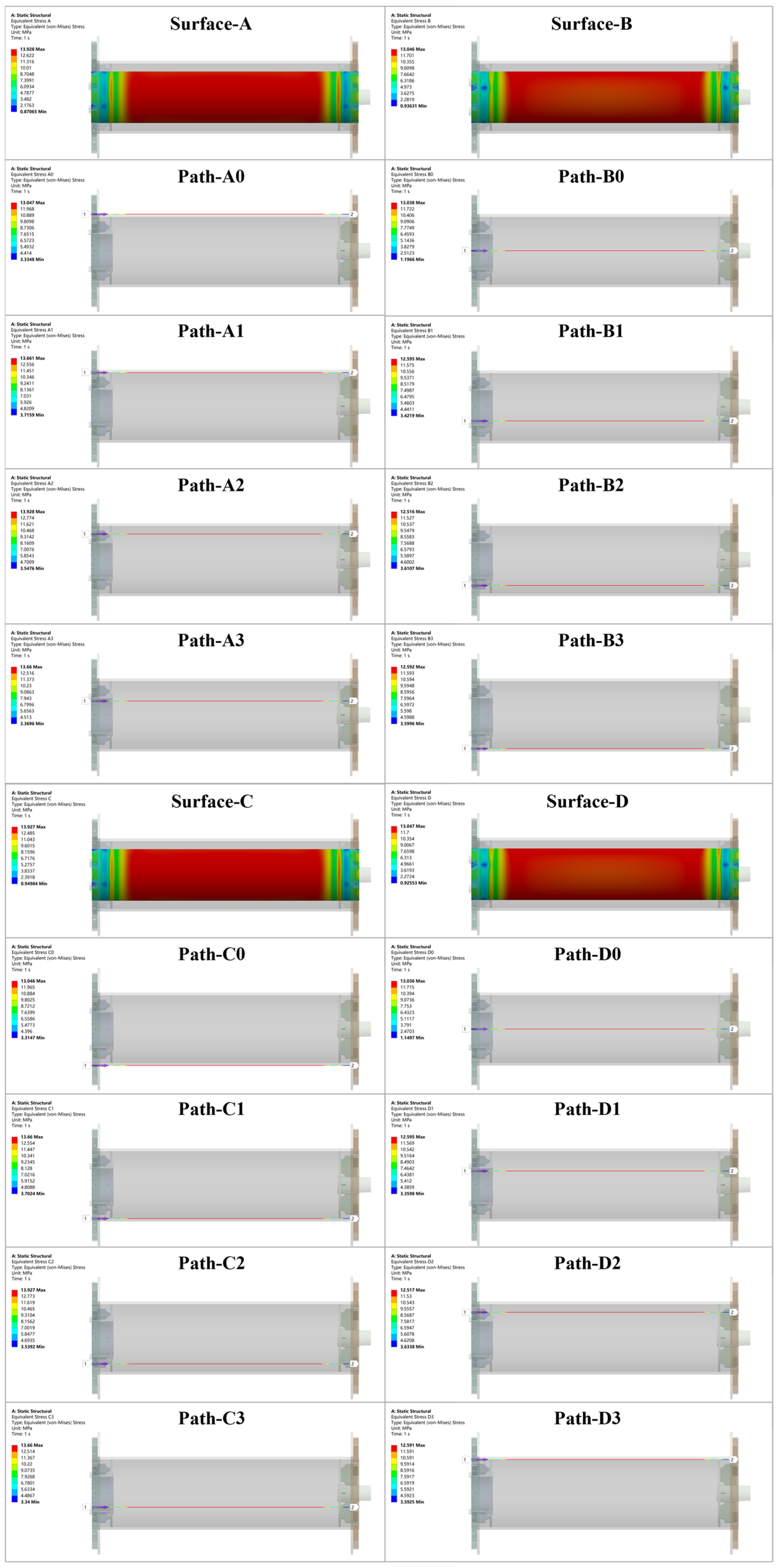
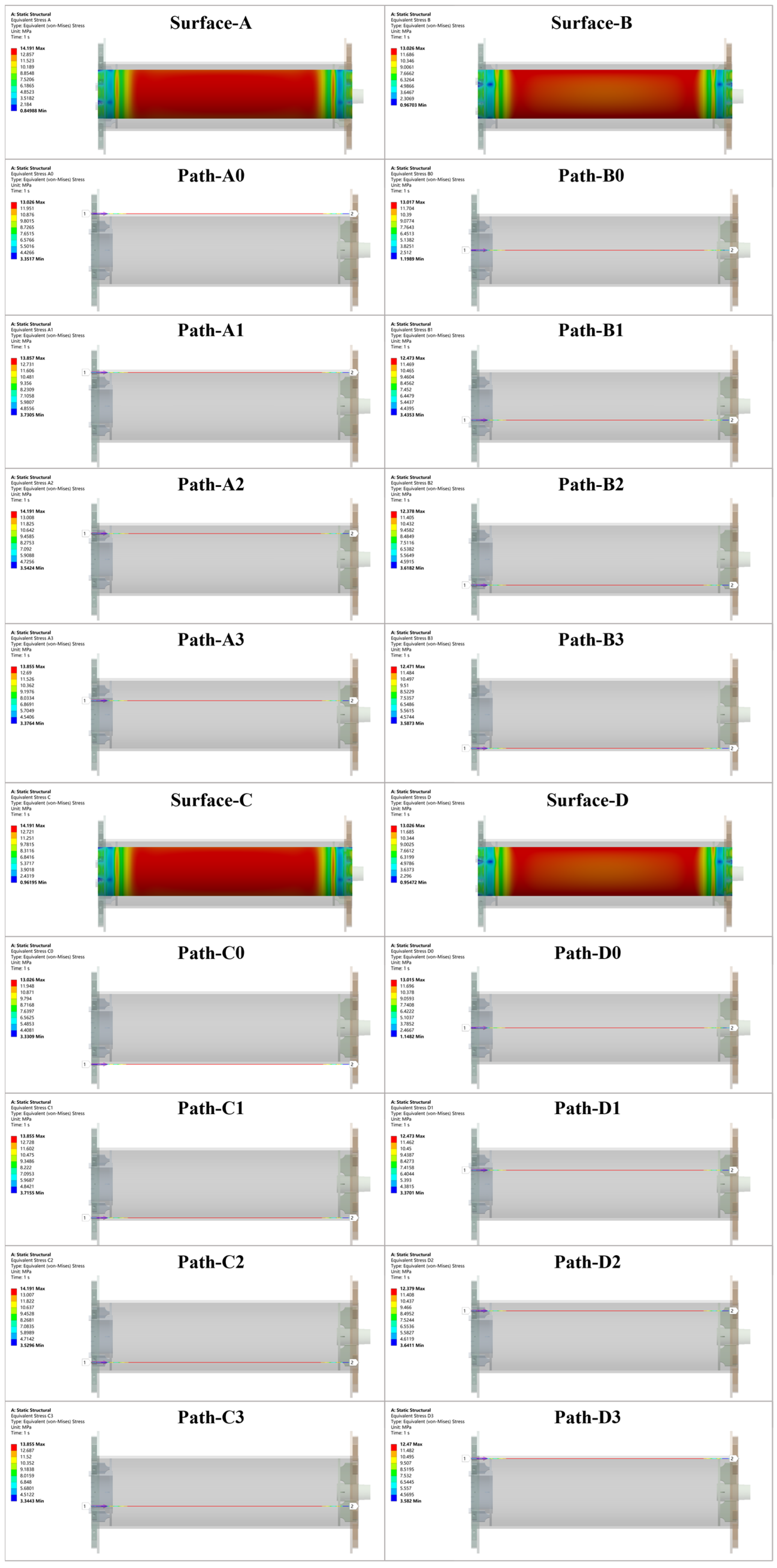
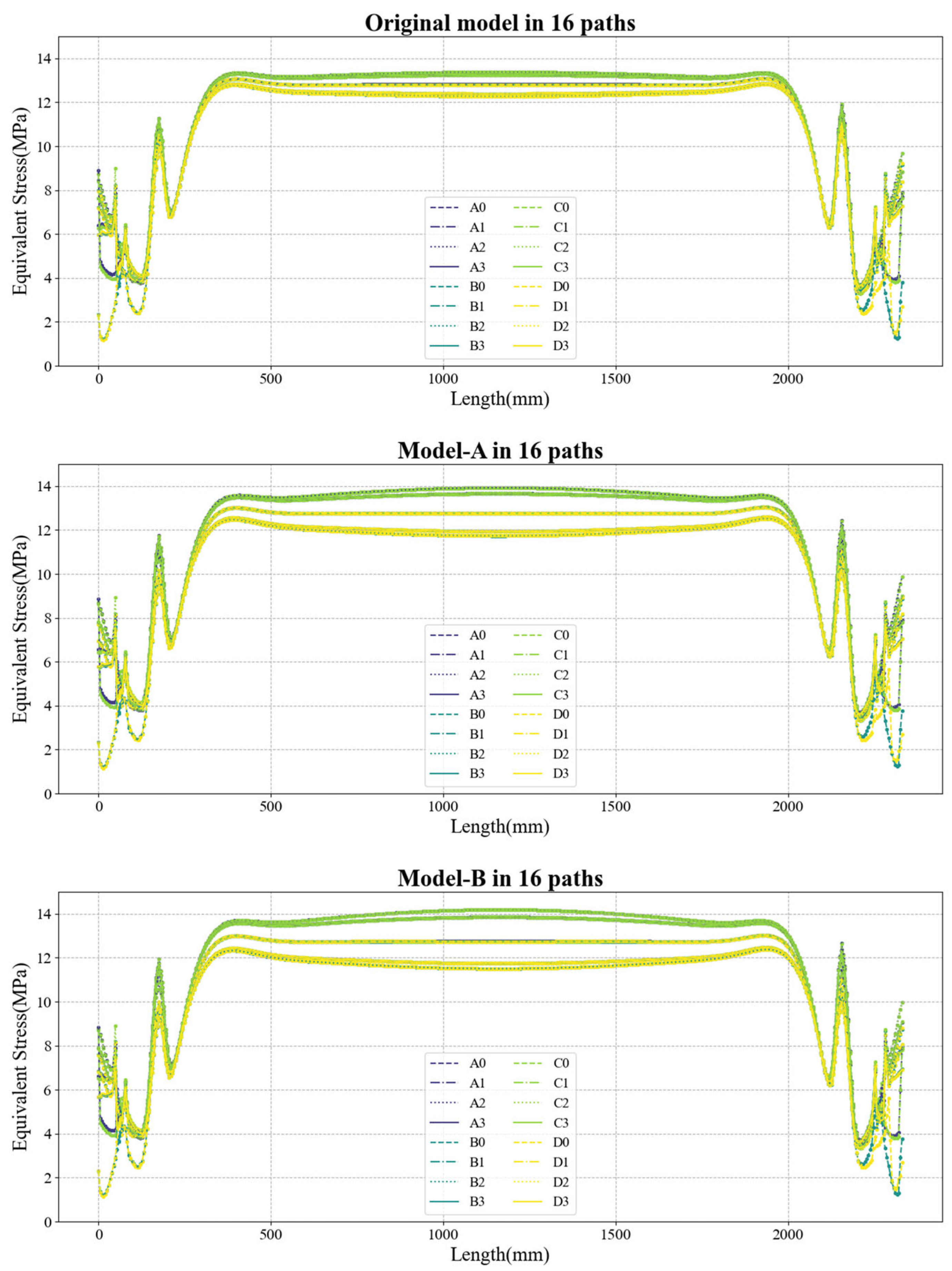
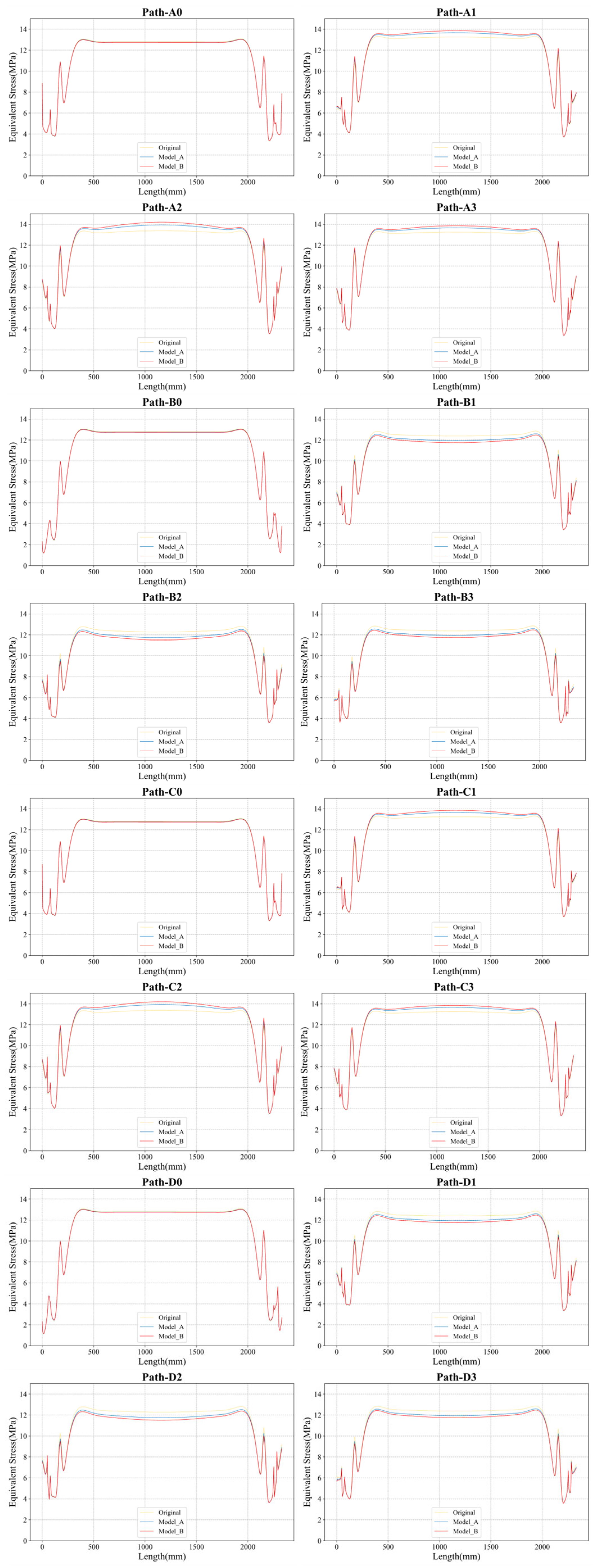
4.2. Simulation Analysis Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Davies, P.; Reaud, Y.; Dussud, L.; Woerther, P. Mechanical behaviour of HMPE and aramid fibre ropes for deep sea handling operations. Ocean Eng. 2011, 38, 2208–2214. [Google Scholar] [CrossRef]
- Li, H.; Diaz, H.; Soares, C.G. A developed failure mode and effect analysis for floating offshore wind turbine support structures. Renew. Energy 2021, 164, 133–145. [Google Scholar] [CrossRef]
- Lin, S.; Li, G.; Li, W.; Ye, H.; Li, H.; Pan, R.; Sun, Y. Experimental measurement for dynamic tension fatigue characteristics of HMPE fibre ropes. Appl. Ocean Res. 2022, 119, 103021. [Google Scholar] [CrossRef]
- Lohrengel, A.; Stahr, K.; Schulze, M.; Wächter, M. Innovative drum construction for multi-layer winding with fibre ropes. In Proceedings of the OIPEEC Conference, Stuttgart, Germany, 24–26 March 2015; pp. 24–26. [Google Scholar]
- Skarbøvik, R.A.; Piehl, H.; Æsøy, V. Tangential stress in multilayer winch drums with high performance synthetic fibre ropes–analytical calculations versus experimental measurements. Ships Offshore Struct. 2020, 15, S82–S97. [Google Scholar] [CrossRef]
- Skarbøvik, R.A.; Piehl, H.; Torben, S.; Nedreberg, M.L.; Æsøy, V. Experimental investigation of stresses in winch drums subjected to multilayer spooling loads from synthetic fibre ropes. In Proceedings of the ASME 2019 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, UK, 9–14 June 2019. [Google Scholar]
- ABS. Certification of Lifting Appliances; American Bureau of Shipping: Houston, TX, USA, 2021. [Google Scholar]
- ABS. Guidance Notes on the Application of Fiber Rope for Offshore Mooring; American Bureau of Shipping: Houston, TX, USA, 2021. [Google Scholar]
- DNV-ST-0378; Offshore and Platform Lifting Appliances. DNV: Bærum, Norway, 2021.
- DNV-RP-N201; DNV-RP-N201 Lifting Appliances Used in Subsea Operations. DNV: Bærum, Norway, 2019.
- Guo, J.; Wan, J.-L.; Yang, Y.; Dai, L.; Tang, A.; Huang, B.; Zhang, F.; Li, H. A deep feature learning method for remaining useful life prediction of drilling pumps. Energy 2023, 282, 128442. [Google Scholar] [CrossRef]
- Liu, Z.; Soares, C.G. Sensitivity analysis of the cage volume and mooring forces for a gravity cage subjected to current and waves. Ocean Eng. 2023, 287, 115715. [Google Scholar] [CrossRef]
- Schulze, M. Kompatibilität von Faserseil und Mehrlagig Bewickelter Seiltrommel: Entwicklung Eines Verfahrens zur Analyse, Berechnung, Abstimmung und Qualitätsbewertung der Mehrlagenwicklung. Ph.D. Thesis, Technische Universität Clausthal, Clausthal-Zellerfeld, Germany, 2019. [Google Scholar]
- Ye, H.; Li, W.; Lin, S.; Ge, Y.; Lv, Q. A framework for fault detection method selection of oceanographic multi-layer winch fibre rope arrangement. Measurement 2024, 226, 114168. [Google Scholar] [CrossRef]
- Dietz, P. Ein Verfahren zur Berechnung Ein-und Mehrlagig Bewickelter Seiltrommeln; Technischen Hochschule Darmstadt: Darmstadt, Germany, 1971; Volume 4, p. 2302. [Google Scholar]
- Henschel, J. Dimensionierung von Windentrommeln; Studiengesellschaft Stahlanwendung eV: Düsseldorf, Germany, 2000. [Google Scholar]
- Lohrengel, A.; Stahr, K.; Wächter, M. Safe use of hoisting drums wound with multiple layers of wire, hybrid, fibre and/or large diameter ropes. In Proceedings of the OIPEEC Conference Texas A&M University, College Station, TX, USA, 22–24 March 2011. [Google Scholar]
- Lohrengel, A.; Stahr, K.; Wächter, M. Simulation of fibre ropes and their effects on the strain scenario of multi-layer wound rope drums. In Proceedings of the OIPEEC Conference Oxford, Oxford, UK, 10–13 March 2013. [Google Scholar]
- Mupende, I. Beanspruchungs-und Verformungsverhalten des Systems Trommelmantel-Bordscheiben bei Mehrlagig Bewickelten Seiltrommeln unter Elastischem und Teilplastischem Werkstoffverhalten; Cuvillier: Göttingen, Germany, 2001. [Google Scholar]
- Otto, S. Ein Nicht-Rotationssymmetrisches Belastungsmodell für die Ermittlung des Beanspruchungsverhaltens Mehrlagig Bewickelter Seiltrommeln; Papierflieger: Clausthal-Zellerfeld, Germany, 2004. [Google Scholar]
- Ye, H.; Li, W.; Lin, S.; Ge, Y.; Han, F.; Sun, Y. Experimental investigation of spooling test on the multilayer oceanographic winch with high-performance synthetic fibre rope. Ocean Eng. 2021, 241, 110037. [Google Scholar] [CrossRef]
- Ye, H.; Li, W.; Zhang, H.; Lin, S.; Zhang, D.; Ge, Y.; Li, Z. Experimental evaluation of dimension-stable synthetic fibre rope under investigation of spooling test on the multilayer winch drum. Ocean Eng. 2023, 279, 114585. [Google Scholar] [CrossRef]
- Popa, M. Forces Experienced by Winch Drums and Reels Systems as a Function of Rope Characteristics and Varying Line Pull—A Theoretical Study. In Proceedings of the 18th North Sea Offshore Crane and Lifting Conference, Stavanger Forum, Stavanger, Norway, 23–25 April 2013; pp. 23–25. [Google Scholar]
- Otto, S.; Mupende, I.; Dietz, P. Influence of the hoisting drum winding system on the end plate loads. In DS 30: Proceedings of DESIGN 2002, the 7th International Design Conference, Dubrovnik; The Design Society: Glasgow, UK, 2002. [Google Scholar]
- Lohrengel, A.; Schulze, M.; Wächter, M. Finite element analysis of wire rope stiffness. In Proceedings of the OIPEEC Conference 2019 Exploring Opportunities-Synthetic/Steel, The Hague, The Netherlands, 12–15 March 2019. [Google Scholar]
- Bos, W.v.d.; Ruiter, C.d.; Maljaars, S. An axi-symmetric FEM model of drum with multi-layer rope winding. In Proceedings of the OIPEEC Conference, Oxford, UK, 10–13 March 2013; pp. 129–139. [Google Scholar]
- Bos, W.v.d. A parametric FEM model of multi-layer drums. In Proceedings of the OIPEEC Conference 2015 Challenging Rope Applications, Stuttgart, Germany, 24–26 March 2015. [Google Scholar]
- Guo, J.; Wang, Z.; Li, H.; Yang, Y.; Huang, C.-G.; Yazdi, M.; Kang, H.S. A Hybrid Prognosis Scheme for Rolling Bearings Based on a Novel Health Indicator and Nonlinear Wiener Process. Reliab. Eng. Syst. Saf. 2024, 245, 110014. [Google Scholar] [CrossRef]
- Guo, J.; Yang, Y.; Li, H.; Dai, L.; Huang, B. A parallel deep neural network for intelligent fault diagnosis of drilling pumps. Eng. Appl. Artif. Intell. 2024, 133, 108071. [Google Scholar] [CrossRef]
- Xu, H.; Soares, C.G. Convergence analysis of hydrodynamic coefficients estimation using regularization filter functions on free-running ship model tests with noise. Ocean Eng. 2022, 250, 111012. [Google Scholar] [CrossRef]
- Liu, Z.; Guedes Soares, C. Numerical Study of Rope Materials of the Mooring System for Gravity Cages. Ocean Eng. 2024, 117135. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | (mm) | (mm) | (mm) | (mm) | (°) | |
|---|---|---|---|---|---|---|
| Model Original | 12 | 12.00 | 12.00 | 2.18 | 70.20 | 0.9930 |
| Model A | 12 | 13.83 | 10.42 | 4.36 | 75.36 | 0.9864 |
| Model B | 12 | 12.99 | 11.08 | 5.42 | 80.18 | 0.9829 |
| Model | MAE | MRE | MSE | RMSE |
|---|---|---|---|---|
| Model A | 0.5643 | 4.65% | 0.3951 | 0.6286 |
| Model B | 0.9204 | 7.49% | 1.0288 | 1.0143 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, H.; Li, W.; Lin, S.; Lv, Q.; Zhang, D. Load Assessment Method for Multi-Layer Oceanographic Winch with Synthetic Fibre Ropes Based on Non-Rotation Symmetric Cylindrical Model. J. Mar. Sci. Eng. 2024, 12, 409. https://doi.org/10.3390/jmse12030409
Ye H, Li W, Lin S, Lv Q, Zhang D. Load Assessment Method for Multi-Layer Oceanographic Winch with Synthetic Fibre Ropes Based on Non-Rotation Symmetric Cylindrical Model. Journal of Marine Science and Engineering. 2024; 12(3):409. https://doi.org/10.3390/jmse12030409
Chicago/Turabian StyleYe, Haoran, Wenhua Li, Shanying Lin, Qingtao Lv, and Dinghua Zhang. 2024. "Load Assessment Method for Multi-Layer Oceanographic Winch with Synthetic Fibre Ropes Based on Non-Rotation Symmetric Cylindrical Model" Journal of Marine Science and Engineering 12, no. 3: 409. https://doi.org/10.3390/jmse12030409
APA StyleYe, H., Li, W., Lin, S., Lv, Q., & Zhang, D. (2024). Load Assessment Method for Multi-Layer Oceanographic Winch with Synthetic Fibre Ropes Based on Non-Rotation Symmetric Cylindrical Model. Journal of Marine Science and Engineering, 12(3), 409. https://doi.org/10.3390/jmse12030409