
The Influence of Refractive Index Changes in Water on Airborne LiDAR Bathymetric Errors

 ,
,  , , and
, , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methodology
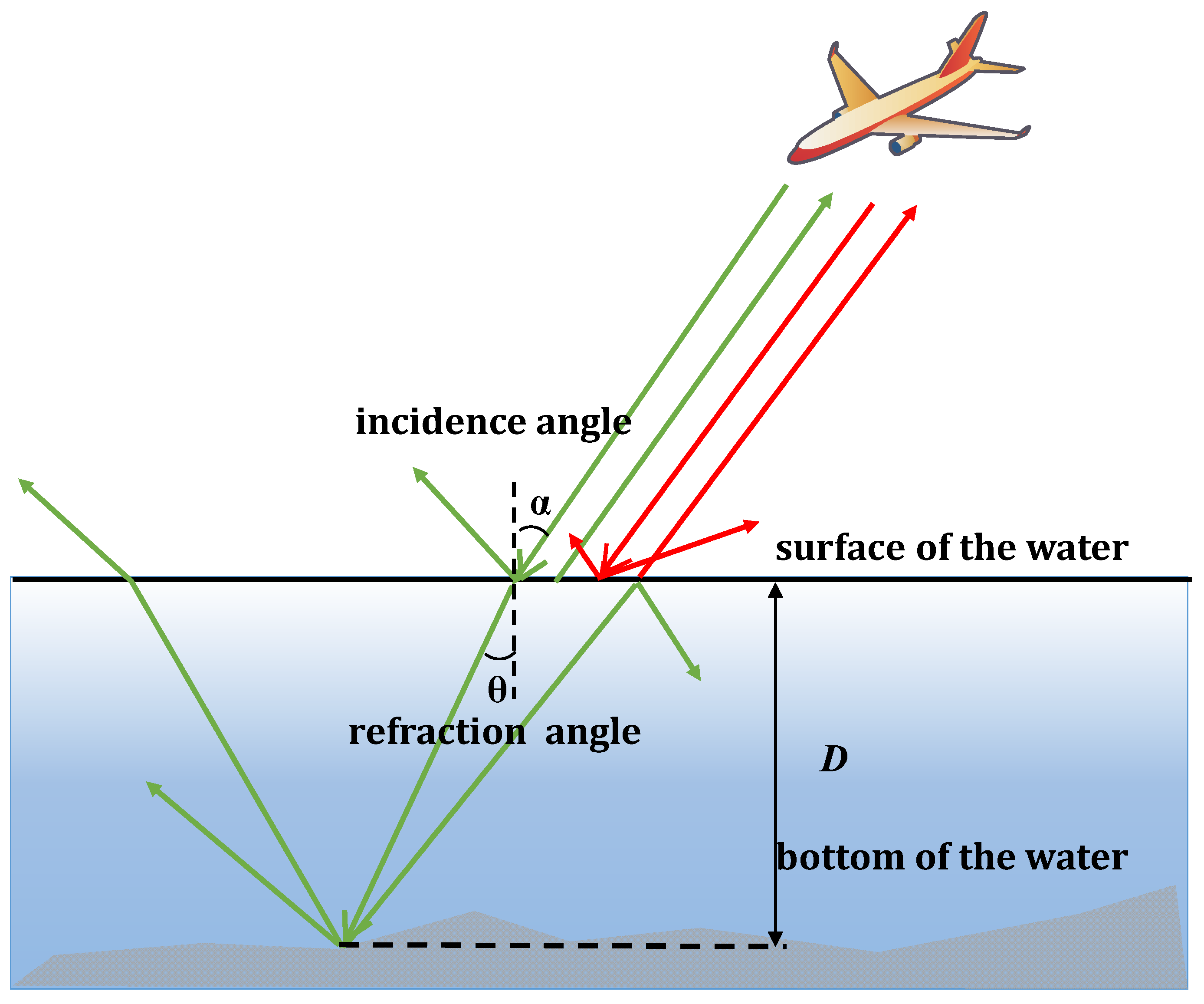
2.1. Principle of ALB
2.2. Refractive Index of Water
2.3. Influence of Refractive Index Changes on the ALB Error
2.3.1. ALB Error Caused by Refractive Index Changes at the Water–Air Interface
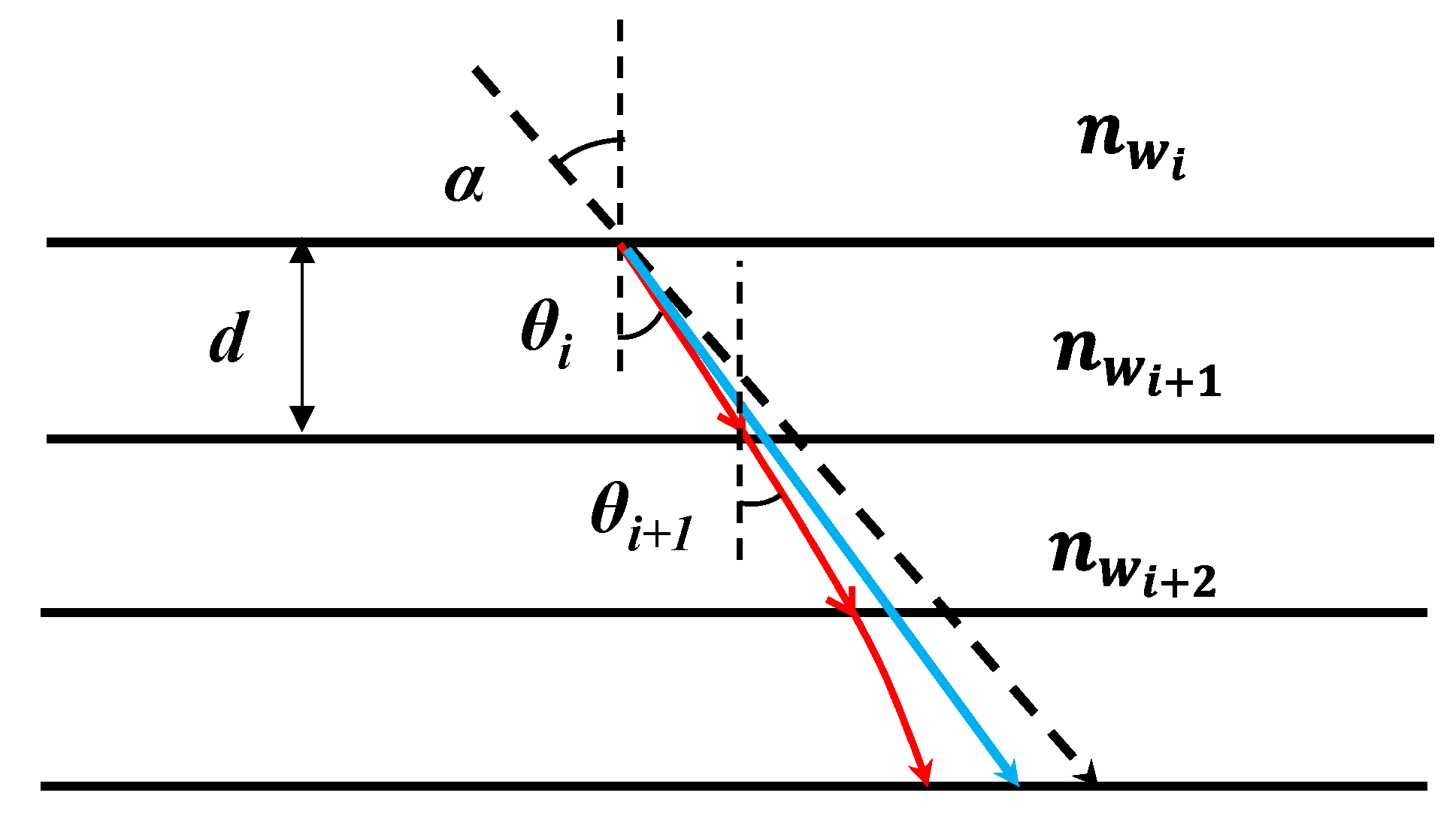
2.3.2. ALB Error Caused by Refractive Index Changes in the Water Column
3. Experiment and Analysis
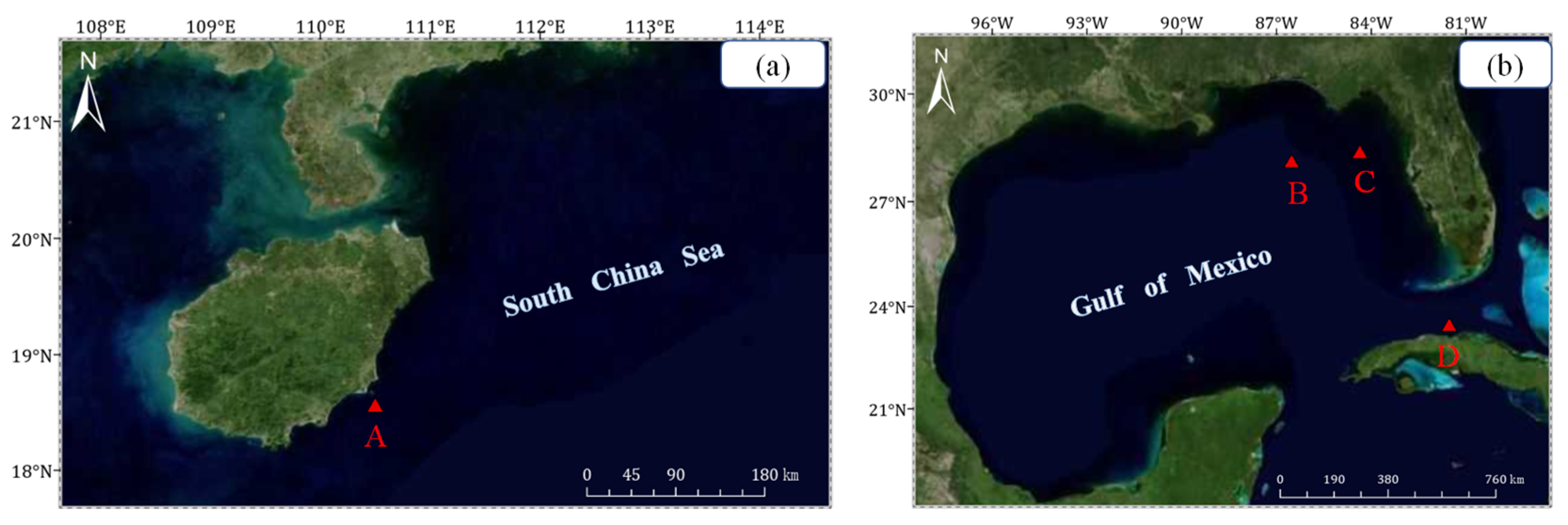
3.1. Experimental Area and Dataset
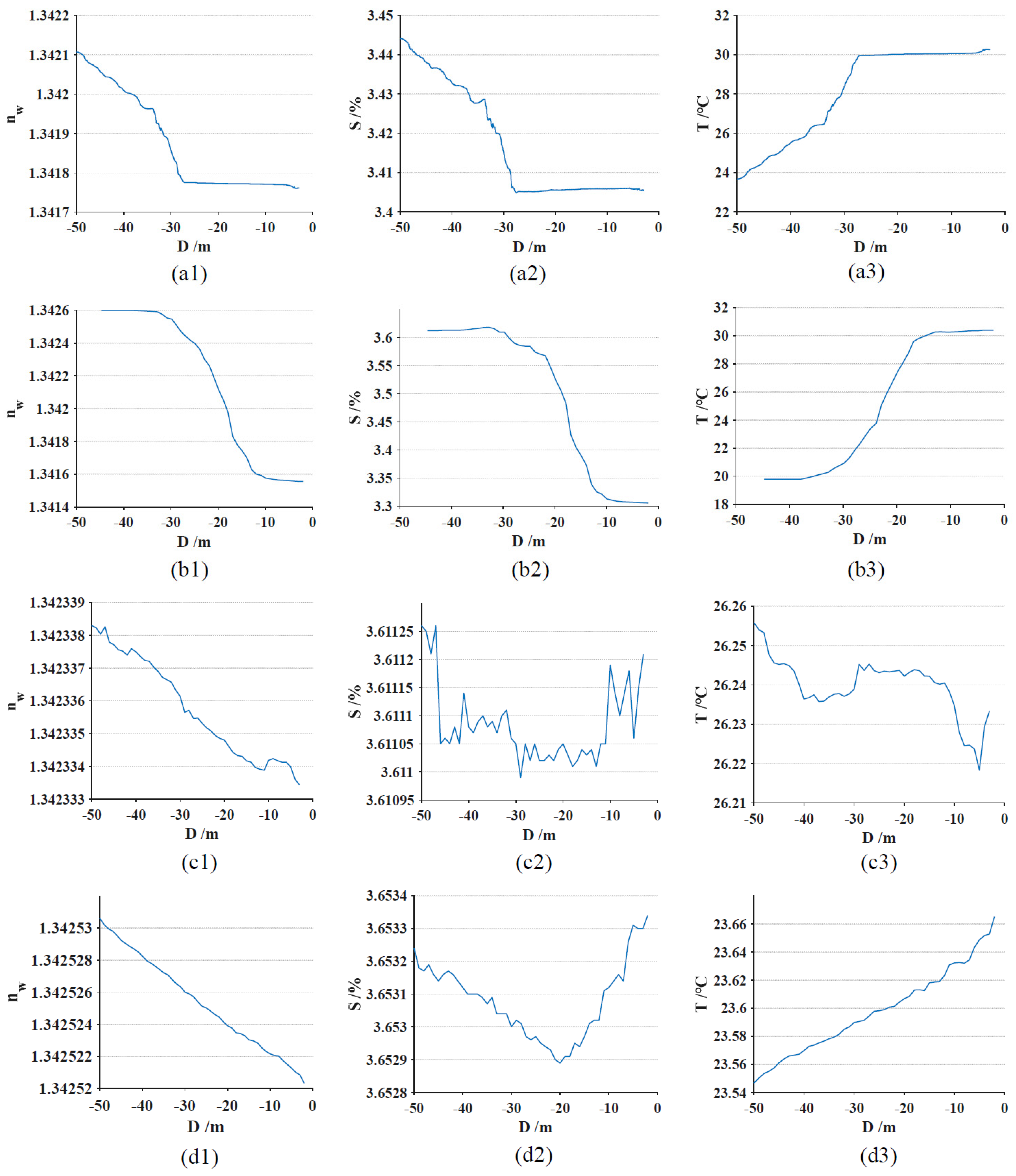
3.2. Analysis of the Refractive Index Changes in Water
3.3. Analysis of the ALB Error Caused by Refractive Index Changes
3.3.1. Analysis of the ALB Error Caused by Refractive Index Changes at the Water–Air Interface
3.3.2. Analysis of the ALB Error Caused by Refractive Index Changes in the Water Column
4. Conclusions
- (1)
- Based on the empirical formula for refractive index calculations, the refractive index changes in water caused by temperature, salinity, and depth were less than 0.001, and the average calculated refractive index of seawater at the sampling points was 1.342;
- (2)
- In a water environment, the ALB error caused by changes in the refractive index of the water–air interface increases with depth. The maximum bathymetric error and maximum planimetric error caused by a change in the refractive index of 0.001 were 0.036 m and 0.015 m, respectively. The bathymetric error decreased with increasing laser incidence angle, while the planimetric error showed the opposite behavior. The influence of incidence angle changes on bathymetric error was relatively low when the refractive indices of the water columns are the same and are only at the millimeter level. However, the incidence angle changes have a greater influence on the planimetric error than on the bathymetric error. When the refractive index was 1.333, the planimetric error changed by 0.045 m for every 5° increase in the incidence angle. Thus, it is necessary to determine whether the effect of the ALB error due to refractive index changes in water needs to be corrected based on the accuracy requirements of data acquisition;
- (3)
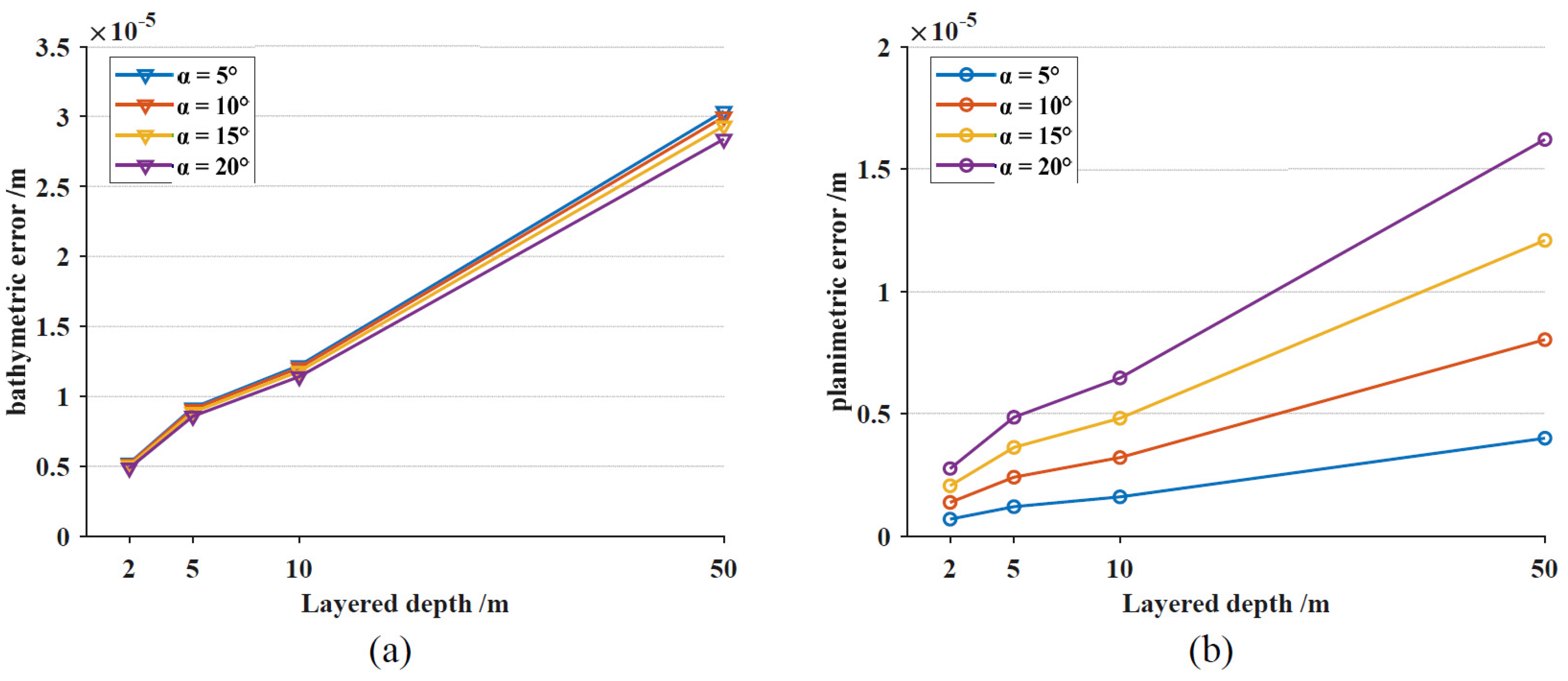
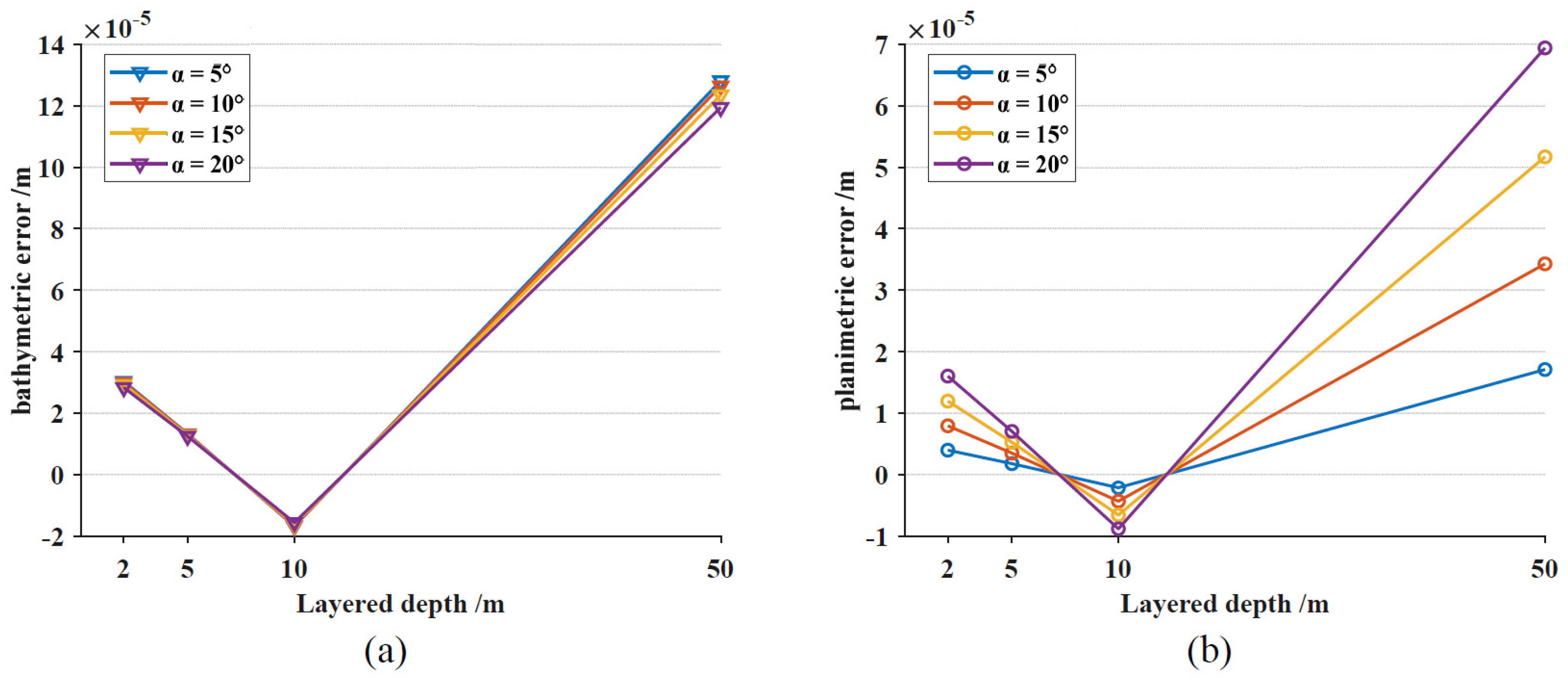
- The ALB errors caused by refractive index changes in the water column were relatively low due to small changes in the refractive indices. The bathymetric error and planimetric error usually increase with increasing layer depth and incidence angle under the conditions of the calculated refractive index. However, due to the influence of the refractive index, irregular variations in bathymetry and planimetric errors may occur. The difference between the water depth calculated by the average refractive index without layers and the water depth calculated by the refractive index with layers was not significant and can be disregarded for different layers and incidence angles;
- (4)
- The premise of this study is that the refractive index of each horizontal layer is stable and constant during ALB pulse propagation and the difference in the refractive indices at different locations within the survey areas is small. Relevant corrections can be considered in the areas of underwater structural monitoring of equipment such as cables and turbines in offshore wind power, underwater archaeological surveys, underwater environmental monitoring, and precision assessment of spaceborne marine remote sensing data.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, W.X.; Guo, K.; Liu, Y.X.; Tian, Z.W.; Tang, Q.H.; Dong, Z.; Li, J. Refraction error correction of Airborne LiDAR Bathymetry data considering sea surface waves. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102402. [Google Scholar] [CrossRef]
- Guo, Y.D.; Feng, C.K.; Xu, W.X.; Liu, Y.X.; Su, D.P.; Qi, C.; Dong, Z.P. Water-land classification for single-wavelength airborne LiDAR bathymetry based on waveform feature statistics and point cloud neighborhood analysis. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103268. [Google Scholar] [CrossRef]
- Guo, K.; Xu, W.X.; Liu, Y.X.; He, X.F.; Tian, Z.W. Gaussian half-wavelength progressive decomposition method for waveform processing of airborne laser bathymetry. Remote Sens. 2017, 10, 35. [Google Scholar] [CrossRef]
- Ji, X.; Tang, Q.H.; Xu, W.X.; Li, J. Island feature classification for single-wavelength airborne lidar bathymetry based on full-waveform parameters. Appl. Opt. 2021, 60, 3055–3061. [Google Scholar] [CrossRef]
- Xu, W.X.; Zhang, F.; Jiang, T.; Feng, Y.K.; Liu, Y.X.; Dong, Z.P.; Tang, Q.H. Feature curve-based registration for airborne LiDAR bathymetry point clouds. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102883. [Google Scholar] [CrossRef]
- Tulldahl, H.M.; Philipson, P.; Kautsky, H.; Wikstrom, S.A. Sea floor classification with satellite data and airborne LiDAR bathymetry. Ocean Sens. Monit. V. 2013, 8724, 100–115. [Google Scholar]
- Birkebak, M.; Eren, F.; Pe’eri, S.; Weston, N. The effect of surface waves on airborne lidar bathymetry (ALB) measurement uncertainties. Remote Sens. 2018, 10, 453. [Google Scholar] [CrossRef]
- Zhao, J.H.; Zhao, X.L.; Zhang, H.M.; Zhou, F.N. Improved model for depth bias correction in airborne LiDAR bathymetry systems. Remote Sens. 2017, 9, 710. [Google Scholar] [CrossRef]
- Su, D.P.; Yang, F.L.; Ma, Y.; Wang, X.K.; Yang, A.X.; Qi, C. Propagated uncertainty models arising from device, environment, and target for a small laser spot airborne LiDAR bathymetry and its verification in the South China Sea. IEEE Trans. Geosci. Remote Sens. 2019, 58, 3213–3231. [Google Scholar] [CrossRef]
- Hodgson, M.E.; Bresnahan, P. Accuracy of airborne lidar-derived elevation. Photogramm. Eng. Remote Sens. 2004, 70, 331–339. [Google Scholar] [CrossRef]
- Parrish, C.E.; Magruder, L.A.; Neuenschwander, A.L.; Forfinski-Sarkozi, N.; Alonzo, M.; Jasinski, M. Validation of ICESat-2 ATLAS bathymetry and analysis of ATLAS’s bathymetric mapping performance. Remote Sens. 2019, 11, 1634. [Google Scholar] [CrossRef]
- Westfeld, P.; Maas, H.G.; Richter, K.; Weiß, R. Analysis and correction of ocean wave pattern induced systematic coordinate errors in airborne LiDAR bathymetry. ISPRS J. Photogramm. Remote Sens. 2017, 128, 314–325. [Google Scholar] [CrossRef]
- Yang, F.L.; Su, D.P.; Ma, Y.; Feng, C.K.; Yang, A.X.; Wang, M.W. Refraction correction of airborne LiDAR bathymetry based on sea surface profile and ray tracing. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6141–6149. [Google Scholar] [CrossRef]
- Maas, H.G. On the accuracy potential in underwater/multimedia photogrammetry. Sensors 2015, 15, 18140–18152. [Google Scholar] [CrossRef] [PubMed]
- Tilton, L.W.; Taylor, J.K. Refractive index and dispersion of distilled water for visible radiation, at temperatures 0 to 60 C. J. Res. Natl. Bur. Stand. 1938, 20, 419–447. [Google Scholar] [CrossRef]
- Quan, X.H.; Edward, S.F. Empirical equation for the index of refraction of seawater. Appl. Opt. 1995, 34, 3477–3480. [Google Scholar] [CrossRef]
- Schwarz, R.; Pfeifer, N.; Pfennigbauer, M.; Mandlburger, G. Depth measurement bias in pulsed airborne laser hydrography induced by chromatic dispersion. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1332–1336. [Google Scholar] [CrossRef]
- Ranndal, H.; Christiansen, P.S.; Kliving, P.; Andersen, O.B.; Nielsen, K. Evaluation of a statistical approach for extracting shallow water bathymetry signals from ICESat-2 ATL03 photon data. Remote Sens. 2021, 13, 3548. [Google Scholar] [CrossRef]
- Stanley, E.M. The refractive index of seawater as a function of temperature, pressure and two wavelengths. Deep Sea Rese. Oceanogr. Abstr. 1971, 18, 833–840. [Google Scholar] [CrossRef]
- McNeil, G.T. Metrical fundamentals of underwater lens system. Opt. Eng. 1977, 16, 128–139. [Google Scholar] [CrossRef]
- Mahrt, K.H.; Waldmann, H.; Kroebel, W. A newly developed in situ-measuring oceanographical probe sensing the optical index of refraction of sea water with new aspects of salinity and density determinations. In Proceedings of the OCEANS 82, Washington, DC, USA, 20–22 September 1982; IEEE: Piscataway, NJ, USA, 1982; pp. 266–271. [Google Scholar]
- Millard, R.C.; Seaver, G. An index of refraction algorithm for seawater over temperature, pressure, salinity, density, and wavelength. Deep Sea Research Part A. Oceanogr. Res. Pap. 1990, 37, 1909–1926. [Google Scholar]
- Zhao, X.Y.; Peng, Y.F.; Zhai, C.C.; Han, X.Y.; Zhang, Y. Influence of inorganic salts on the refraction index of water. Appl. Mech. Materials. 2015, 716, 118–121. [Google Scholar] [CrossRef]
- Saputra, L.R.; Radjawane, I.M.; Park, H.; Gularso, H. Effect of Turbidity, Temperature and Salinity of Waters on Depth Data from Airborne LiDAR Bathymetry. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2021; Volume 925, p. 012056. [Google Scholar]
- Gu, L.J.; He, X.G.; Zhang, M.; Lu, H.L. Advances in the Technologies for Marine Salinity Measurement. J. Mar. Sci. Eng. 2022, 10, 2024. [Google Scholar] [CrossRef]
- Kraus, E.B.; Turner, J.S. A one-dimensional model of the seasonal thermocline II. The general theory and its consequences. Tellus 1967, 19, 98–106. [Google Scholar] [CrossRef]
- Huang, P.Q.; Lu, Y.Z.; Zhou, S.Q. An objective method for determining ocean mixed layer depth with applications to WOCE data. J. Atmos. Ocean. Technol. 2018, 35, 441–458. [Google Scholar] [CrossRef]
- Chen, Y.; Xiao, C.B.; Zhang, Y.; Lai, Z.G. The Mixed Layer Salinity Budget in the Northern South China Sea: A Modeling Study. J. Mar. Sci. Eng. 2023, 11, 1693. [Google Scholar] [CrossRef]
- Johnson, G.C.; Lyman, J.M. GOSML: A global ocean surface mixed layer statistical monthly climatology: Means, percentiles, skewness, and kurtosis. J. Geophys. Res. Ocean. 2022, 127, e2021JC018219. [Google Scholar] [CrossRef]
- Brenner, S.; Thomson, J.; Rainville, L.; Torres, D.; Doble, M.; Wilkinson, J.; Lee, C. Acoustic sensing of ocean mixed layer depth and temperature from uplooking ADCPs. J. Atmos. Ocean. Technol. 2023, 40, 53–64. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, X.; Jiang, Z.; Xu, W.; Guo, Y.; Liu, Y.; Guo, Z. The Influence of Refractive Index Changes in Water on Airborne LiDAR Bathymetric Errors. J. Mar. Sci. Eng. 2024, 12, 435. https://doi.org/10.3390/jmse12030435
Xiao X, Jiang Z, Xu W, Guo Y, Liu Y, Guo Z. The Influence of Refractive Index Changes in Water on Airborne LiDAR Bathymetric Errors. Journal of Marine Science and Engineering. 2024; 12(3):435. https://doi.org/10.3390/jmse12030435
Chicago/Turabian StyleXiao, Xingyuan, Zhengkun Jiang, Wenxue Xu, Yadong Guo, Yanxiong Liu, and Zhen Guo. 2024. "The Influence of Refractive Index Changes in Water on Airborne LiDAR Bathymetric Errors" Journal of Marine Science and Engineering 12, no. 3: 435. https://doi.org/10.3390/jmse12030435
APA StyleXiao, X., Jiang, Z., Xu, W., Guo, Y., Liu, Y., & Guo, Z. (2024). The Influence of Refractive Index Changes in Water on Airborne LiDAR Bathymetric Errors. Journal of Marine Science and Engineering, 12(3), 435. https://doi.org/10.3390/jmse12030435