1. Introduction
In the Barents Sea, icebergs are formed as a result of the calving of outflow glaciers of Spitsbergen, Franz Josef Land, and Novaya Zemlya [
1,
2,
3]. The rate of iceberg formation and the sizes of icebergs are determined by the thickness and dynamics of the glaciers, as well as the seabed bathymetry calving areas [
4]. The average sizes of icebergs in the Barents Sea were characterized by a height above sea level of 11 m, a length at the water level of 140 m, a width at the water level of 70 m, and a draft of 50 m. The average mass of an iceberg was estimated at 927 thousand tons [
5]. The general direction of the iceberg drift corresponds to the direction of the surface currents. This means that most of the icebergs formed by the outflow glaciers of Spitsbergen and Franz Josef Land drift southwest following the East Spitsbergen Current, and some icebergs may drift into the central regions of the Barents Sea under the influence of wind, waves, and drift ice.
The actual trajectories of drifting ice and icebergs in the Barents Sea have a complex shape, with numerous loops and corner points due to the combined influence of inertial forces, tidal currents, and winds [
6]. Iceberg trajectories were reconstructed using geolocation data transmitted by buoys installed on icebergs [
7,
8,
9]. Typically, the lifetime of a buoy on an iceberg in the Barents Sea does not exceed one month. To a certain extent, this is due to deterioration of icebergs, affecting the positions of the buoys on icebergs. The deterioration of icebergs leads to a decrease in their mass and changes in the shape and position of the icebergs. These processes change the balance of inertial and drag forces acting on icebergs, and in turn, affect the drift of icebergs.
Estimates of the appearances of icebergs in various regions of the Arctic and Antarctic are necessary for climate modeling [
10], freshwater supply [
11], offshore development [
12], and shipping [
12,
13]. Numerical simulations of iceberg drift have been performed to calculate the probability of iceberg appearances in specific regions [
14,
15,
16,
17,
18,
19]. The research was based on a numerical analysis of momentum balance equations describing the drift of icebergs. Changes in the masses of icebergs due to deterioration processes affected the drift of icebergs.
Several physical processes contributing to the deterioration of icebergs have been considered in the scientific literature, including the bending failure of icebergs [
20,
21], surface [
22], bottom [
23], and lateral [
24] melting of icebergs, and wave erosion [
25,
26]. Bending failure is the most important factor influencing the splitting of large tabular icebergs calved from glaciers of the Antarctic and Greenland into smaller patterns. The size of icebergs in the Barents Sea is much smaller than in Antarctica or near Greenland. Therefore, we hypothesize that bending failure is a relatively rare phenomenon, and the main physical mechanism of iceberg deterioration in the Barents Sea is attributed to melting.
Crawford et al. [
22] studied the surface ablation of an ice island that broke away on 5 August 2010 from the Petermann Glacier in northwest Greenland (81° N, 61° W). The estimated surface ablation rate was approximately 1 m per month (August 2011) or 1.4 mm/h. The rate of surface ablation of the glaciers in this region is approximately the same. Similar estimates were obtained for Spitsbergen glaciers [
27].
The bottom melting of icebergs was studied to estimate the potential loss of ice mass when icebergs are towed from Antarctica to provide a source of fresh water in arid regions [
23]. Using the theory of a turbulent boundary layer in the water flow near a semi-infinite plate, the rate of bottom melting was estimated [
28]. The melting rate was obtained as proportional to
, where
and
are the velocities of the iceberg and water, and
is the difference in the water and ice temperatures. The use of this formula causes problems when the iceberg drifts with surrounding water. In this case,
is determined by the movement of melt water in the boundary layer and must be found from the solution of the boundary layer problem. The rocking of icebergs caused by waves also affects the movement of water relative to the surface of the icebergs.
Russell-Head [
29] investigated the melting of iceberg models in calm water of different temperatures and salinities. Most of the experiments were carried out at water temperatures above 3 °C. The effect of salinity on the melt rate was found to be negligible for icebergs floating in water with a salinity ranging from 17.5 ppt and 35 ppt. Daley and Vetch [
13] studied the melting of iceberg models in calm water and under rough conditions. The water temperature was 15–16 °C. It has been found that the rate of the mass loss of icebergs in calm water and in rough water conditions is the same. The empirical formulas of El-Tahan et al. [
26] were derived from observations of large icebergs in Antarctica.
Josberger [
30] and White et al. [
25] studied the effect of notch formation in the iceberg wall at the waterline caused by waves. Josberger [
30] conducted the only wave erosion experiment with a wave height of 5 cm and a wave period of 0.4 s in water with a temperature of 4 °C. White et al. [
25] reported the results of two experiments on melting, floating ice blocks in a circular wave tank filled with water with a temperature of 13.5 °C. Using the Reynolds analogy, White et al. [
25] derived a formula that describes the melting rate at the waterline depending on the wave height, wave period, and temperatures of water and ice. White et al. [
25] reported the formation of ripples on the surface of submerged ice. Josberger and Martin [
31] described the formation of cusps on a vertical ice wall melting in salt water with a temperature above 25 °C. A scallop-shaped structure was observed on the bottom surface of floating ice and on the surfaces of icebergs under natural conditions [
32] and in laboratory experiments [
33].
This paper describes the results of laboratory experiments on the melting of iceberg models floating in sea water under rough conditions. In accordance with the geometrical similarity, the sizes of the iceberg models and wave frequencies correspond to the sizes of icebergs and the frequencies of swell and wind waves in the Barents Sea. The experiments were carried out in a cold laboratory at the University Centre in Svalbard, with water temperatures below 2 °C. This paper consists of an Introduction (
Section 1) and six sections describing the organization of the experiments (
Section 2), geometrical and physical scaling (
Section 3), data processing (
Section 4), obtained results (
Section 5), the Discussion (
Section 6), and Conclusions (
Section 7).
Section 5 includes five subsections describing the data obtained on the evolution of icebergs masses and shapes, ice and water temperatures, and heat fluxes in water and ice.
2. Laboratory Experiment
Eight laboratory experiments (1–8) were carried out in the cold laboratory of the University Centre in Svalbard in December 2022 and February 2023.
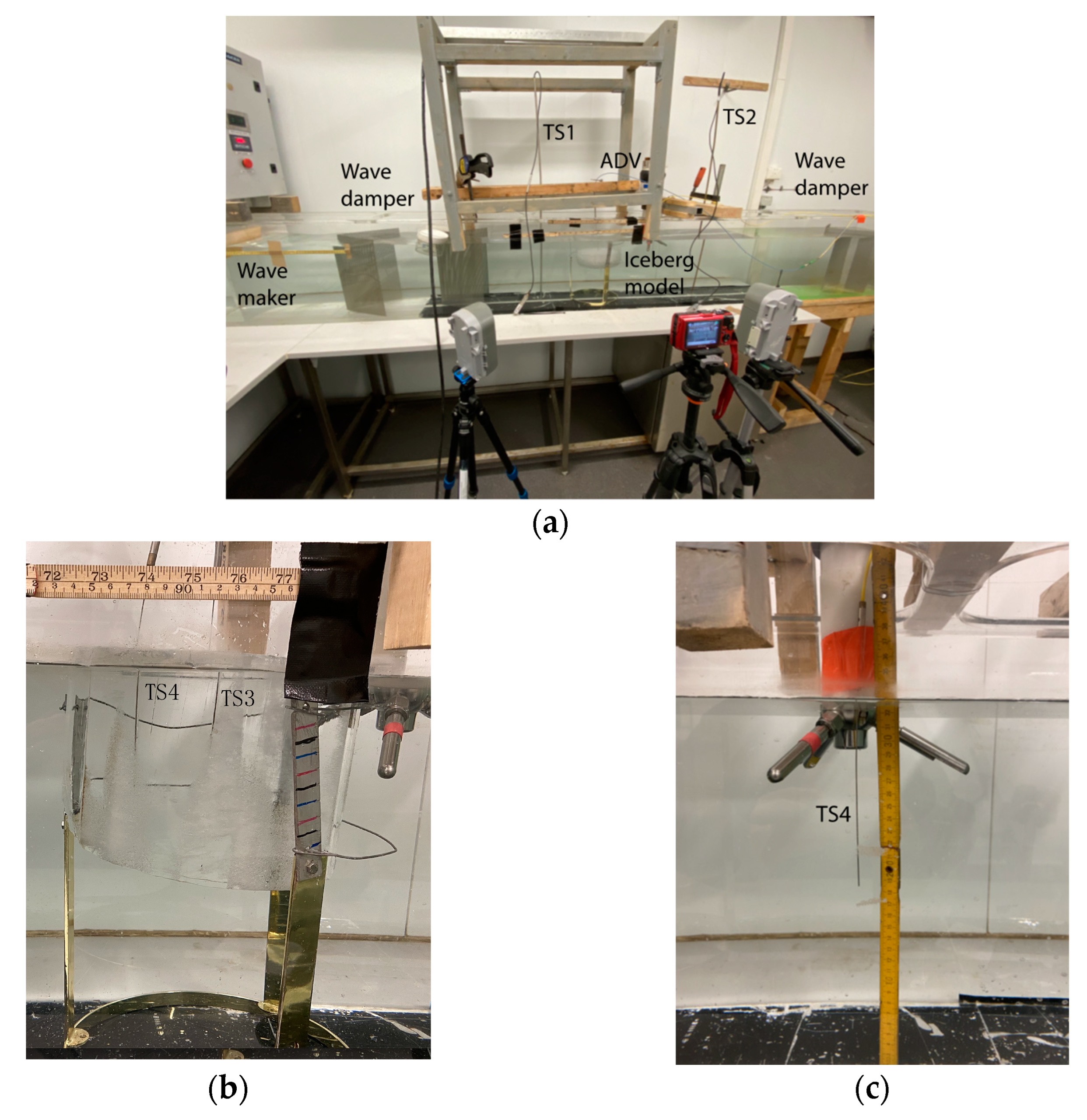
Figure 1 shows the organization of the experiments and installation of equipment. The experiments were carried out in an acrylic wave tank that was 3.5 m long and 30 cm wide and was filled with sea water with a salinity of 33.5 ppt. The water depth in the tank was 32 cm. Blocks of columnar freshwater ice of a cylindrical shape were made from the ice cores of lake ice to model icebergs. The height and diameter of the ice blocks were about 15 cm and 24 cm, respectively. The surfaces of some iceberg models were chipped. The iceberg models were placed inside a metal-wire frame that prevented them from drifting along the tank, but did not limit their heave, roll, pitch, and yaw within the frame. Vertical frame elements were marked to measure the vertical dimensions of floating icebergs using video recordings and photographs, which were taken during the experiments. Horizontal and vertical length scales were also glued to the tank wall.
To create waves in the tank, a wedge-shaped wavemaker was used, crossing the water surface, and cyclically moving in the vertical direction. The frequency of movement of the wavemaker varied in the range of 1–3 Hz. Wave dampers (perforated metal plates and floating plastic boxes filled with water) were used to reduce the amplitude of waves near the iceberg and reduce the amplitude of waves reflected from the tank wall. The amplitude, frequency, and wavelength were measured using video camera recordings.
The water temperature was measured using two temperature strings, TS1 and TS2 Geoprecision (Ettlingen, Germany), installed vertically in the wave tank in the front and behind the iceberg model for experiments 1–4. For experiments 5–8, only temperature string TS1 was installed. Temperature measurements were carried out with a spatial resolution of 5 cm and a temporal resolution of 1 min (
Figure 1a). The accuracy and resolution of TS1 and TS2 were 0.1 °C and 0.01 °C, respectively.
For experiments 1–4, a fiber optic temperature string (FBG sensors), TS3 (AOS GmBh, Dresden, Germany), was installed at the middles of icebergs to measure the vertical profile of the ice temperature (
Figure 1b). A similar temperature string, TS4, was installed, along with an acoustic Doppler velocimeter (Sontek ADV Hydra 5 MHz, San Diego, CA, USA) to measure the temperature and calculate the turbulent heat flux (
Figure 1c). The sampling interval was programmed to 1 Hz for ice temperature measurements and 200 Hz for heat flux calculations.
FBG sensors provide measurements with a formal resolution of 0.012 °C. The AOS GmBh limits the accuracy and resolution of the temperature measurements with FBG sensors to 0.4 °C and 0.08 °C, respectively, due to system noise and environmental influences. The length of the fiber Bragg grating, with 20,000 cells representing each FBG sensor, is 1 cm. It is burned by two interfering laser beams in an optical fiber with a diameter of . An optical fiber with 12 FBG sensors is placed in a metal tube with a diameter of 1 mm. The thermal inertia of FBG sensors is very small compared to other types of temperature sensors. FBG sensors were calibrated in a mixture of ice and fresh water with a stable temperature of 0 °C. The moving average procedure was applied to the row data to exclude a noise caused by the short response time of FBG sensors.
For experiments 5–8, the temperature string TS3 was installed in the middles of icebergs, and the temperature string TS4 was installed at a distance of 7–8 cm from TS3 at the walls of the icebergs (
Figure 1b and
Figure 2a). The distance between points A1 and B1 as well as points A2 and B2 in
Figure 2a was 7–8 cm. Temperature strings were placed in vertical holes with a diameter of 2.5 mm and a length of 10 cm and drilled into the iceberg: the lengths of the segments (A1, A2) and (B1, B2) in
Figure 2a were equal to 10 cm. Segments (A1, A2) and (B1, B2) each included 8 temperature sensors. Four temperature sensors were in the air at 1, 2, 3, and 4 cm distances above the surfaces of the icebergs. Temperature sensor 1 measured the temperature 8 cm below the iceberg’s surface, and temperature sensor 12 measured the temperature 4 cm above the iceberg’s surface. The positions of the temperature sensors are indicated by the horizontal strips in
Figure 2a.
The ADV sampling rate was programmed to 25 Hz. The measurements were carried out in bursts with a 20 min burst interval. In each burst, the ADV collected 20,000 water velocity samples over 800 s.
Figure 2b shows the sampling locations of the ADV and TS4 relative to the iceberg model. The velocity range index ADV was assigned a value 0, corresponding to a velocity range of
cm/s. The probe accuracy is
of the measured speed of
mm/s. ADV seeding material was added to the water to ensure that the correlation of the recorded data was greater than 70%. ADV measurements were carried out in intervals of turbulent measurements (ITMs). During these intervals, TS4 sampled at a 200 kHz frequency, and TS3 did not operate.
The experiment durations (ED), wave amplitudes (
), and wave frequencies (
) are given in
Table 1. The wave amplitude
was measured from video recordings at a distance of
20 cm from the icebergs. At the water–ice boundary, the amplitudes of water movement were greater. The
values in
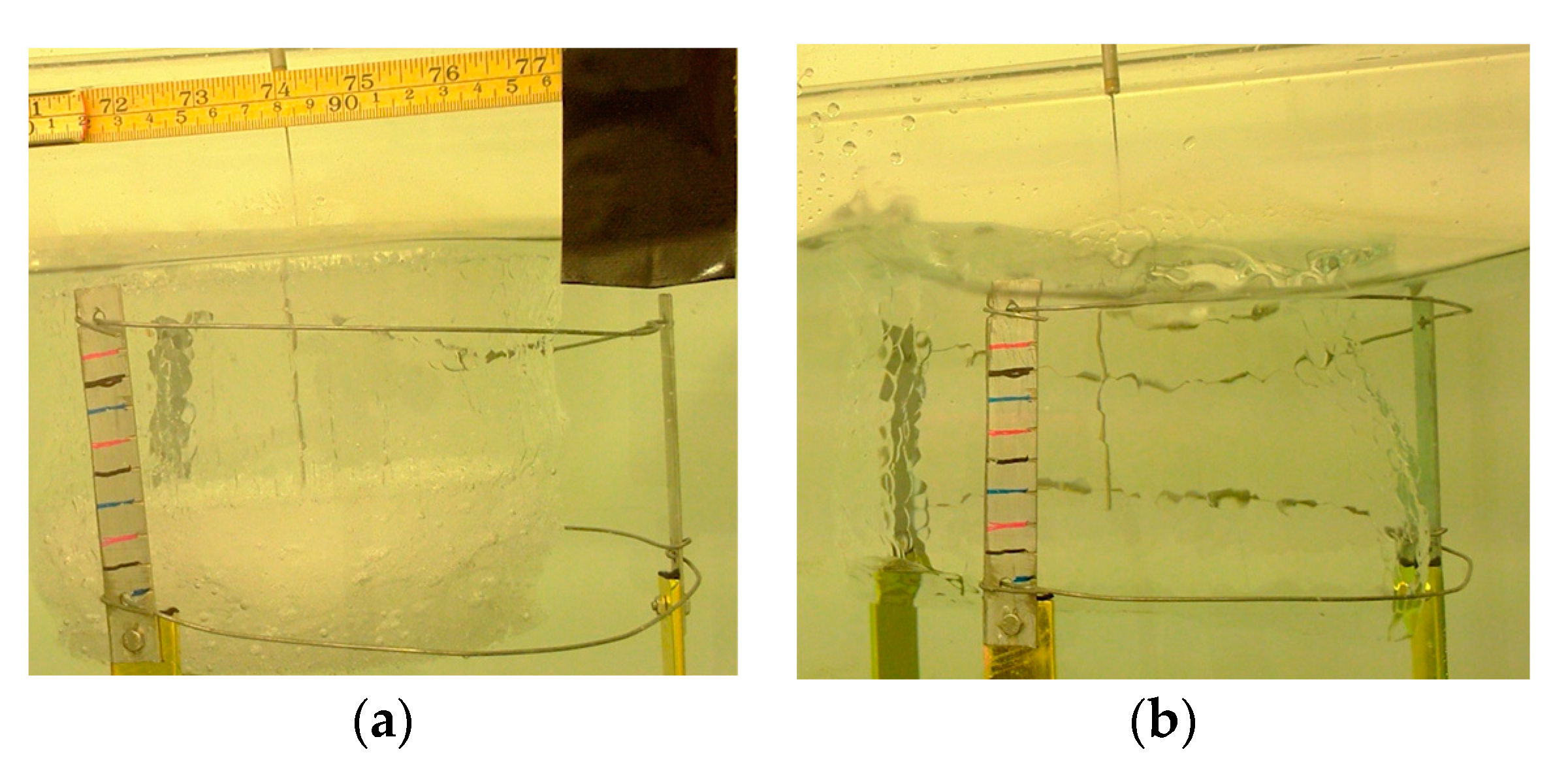
Table 1 indicate representative wave amplitudes in the tests. Experiment 4 was conducted using an iceberg model that was protected on the sides by a plastic barrier made from a plastic bottle (
Figure 3). The bottom of the bottle was cut off, and the iceberg was in direct contact with the sea water below. The space between the ice and the wall of the bottle, which was 1–2 cm wide, was also filled with a mixture of sea water and melt water. The purpose of the experiment was to investigate a way to reduce the melting of icebergs during towing [
11].
3. Scaling
The diameter of an iceberg is considered as a representative horizontal scale. The geometric scaling factor
is the ratio of the natural-scale iceberg diameter (
) to the model-scale iceberg diameter (
). The eigen frequency of the heave oscillations of a cylindrical iceberg is calculated using the formula
where
and
are the water and ice densities,
and
are the vertical dimension and the radius of the iceberg,
is the gravity acceleration, and
is the added mass coefficient [
34,
35]. Assuming
kg/m
3,
kg/m
3,
cm, and
cm, we find
rad/s, and the period of natural oscillation is
s. It is very close to the period 0.96 s for heave oscillations of iceberg models measured in the experiments.
We assume that the scaling factor changes in the range . This corresponds to the vertical dimensions of full-scale icebergs (from 12 m to 60 m), with the vertical height for an iceberg model of 15 cm. Accordingly, the radii of full-scale icebergs vary in the range from 10 m to 50 m, when the radius of an iceberg model is 12 cm. The full-scale dimensions correspond to the typical sizes of icebergs in the Barents Sea.
From (1), it follows that the eigen frequency of the heave oscillations of the full-scale cylindrical iceberg is calculated using the formula
The wave length
is calculated from the dispersion equation
where the wave number is
, and
is the water depth. The wave frequency in the experiments changed according to
Table 1, in the range
rad/s. The wave frequencies were higher than the eigen frequencies of the iceberg models in the experiments. Assuming
m, we find that the wave numbers were in the range
m
−1 (
Table 1), and the wave lengths were in the range
cm. The wave numbers satisfied the inequality
> 2, allowing us to assume
. Thus, the deep water approximation is valid for describing waves in the experiments.
The frequency of waves and the period of waves at the full scale and the model scale are related by the formulas
Figure 4 shows the full-scale periods and amplitudes of waves calculated with the model wave periods measured in the experiments versus the geometrical scaling factor (
Table 1). Full-scale periods varying from 4 s to 15 s correspond to periods of wind waves and swell. Full-scale amplitudes are within the typical values of swell and wind wave amplitudes in the Barents Sea [
15].
The time for temperature equalization in an ice body with fixed boundaries is determined using the formula
where
kJ/(kg
) is the specific heat capacity of ice,
W/(m
) is the thermal conductivity of ice,
is the body diameter, and
is a dimensionless coefficient depending on the body shape and boundary conditions [
36]. The coefficient
when the body is a cube with side
and a fixed temperature on the faces. The full-scale time of temperature equalization is calculated with the formula
.
The representative iceberg melting time (
) spent for the melting of 10% of the iceberg mass
is calculated using the formula
From the energy balance, it follows with
where
kJ/kg is the latent heat from ice fusion,
is the mean heat flux to the ice–water interface, and
is the area of the submerged surface of the iceberg. The heat flux
is the sum of the heat fluxes from water
and from ice
to the interface. Assuming that the full-scale mass and area of the submerged surface of the iceberg are scaled to the model quantities as
and
, we found
, where
is the heat flux scale factor.
The conductive horizontal heat flux from the iceberg to the ice–water interface is estimated with the formula
where
is the interface temperature, and
is the ice temperature in the iceberg center. The inequality
is valid for
on a laboratory scale. Assuming similar values of
in the laboratory experiment and in the full-scale study we found that
. In the full-scale study
, and the inequality
is valid in any time if
.
The temperature
can be higher than the freezing point
of the ambient sea water, since the salinity of the melt water is less than the salinity of the ambient water. Neshyba and Josberger [
36] considered the thermal driving for the melting of a vertical ice wall using
where
is the ambient water temperature.
The heat flux to the iceberg surface
depends on the type of water movement near the iceberg surface [
31]. In stagnant water, the convective flow near a vertical ice wall is laminar near the bottom edge of the wall and becomes turbulent at a distance of
20 cm from the edge. Neshyba and Josberger [
24] estimated the average melting rate over the wall height
using the formula
where
is the wall height above the transition point from the laminar to turbulent boundary layer. The term
sets the heat flux scale factor as
.
Wells and Worster [
37] and Kerr and McConnochie [
38] considered the dissolution and melting of a vertical ice wall caused by the influence of salt water. Dissolution is characterized by a discontinuity of salinity at the ice–water interface. In our experiments, the ice salinity was zero, and the ice temperature was below zero even after temperature equalization. It indicates a nonzero water salinity at the interface. Therefore, in our experiments, the ice surface dissolved. Thermal driving for the dissolution of the vertical wall equals the difference between the salinities of the ambient water (
) and the water at the interface (
):
The salinities of the ambient water (
) and the water at the interface (
) are expressed by the formulas [
39]
The salinity of the ambient water in the experiments was
ppt, and the freezing point was
.
The seawater density is expressed by the formula [
37]
where
is the ambient water density. Formula (13) captures the dominant buoyancy driving the flow for ice and seawater systems.
A self-similar solution describing the dissolution of the vertical ice wall in a laminar flow leads to the melting rate [
38]
where
m
2/s is the compositional diffusivity, and
m
2/s is the kinematic viscosity of the sea water. Using Formula (12), we modify Formula (14) to
where thermal driving is
Assuming
, we find
m
5/4/(day
5/4). The heat flux scale coefficient equals
.
Kerr and McConnochie [
38] adopted the formula
, derived for a turbulent thermal boundary layer with
, to describe dissolution [
40]. The dissolution rate was calculated with the formula
Using Formulas (12) and (13), we modify Formula (17) to
Assuming
, we estimate
m/(day
4/3). Formulas (17) and (18) do not support any scale effect, and
.
White et al. [
25] used Reynolds analogy-derived formulas to determine the melting rate
caused by the wave erosion of fixed iceberg at the waterline:
where
and
are, respectively, the wave amplitude and wave frequency,
is the wave’s Reynolds number, and
is roughness height. Formulas (19) and (20) are valid, respectively, for the smooth (
) and rough (
) surfaces of ice.
The heat flux scale coefficient equals according to Formula (19), and according to Formula (20), if the ratio is the same in the full and model scales. Formulas (10), (14) and (15) support a decreasing dissolution rate with an increasing geometrical scale , while Formulas (19) and (20) predict an increasing wave-induced melting rate with an increasing geometrical scale .
We assume the pitch and heave motions of floating icebergs caused by waves with amplitudes similar to the wave amplitudes. In this case, Formulas (19) and (20) are modified in the following way:
where the first summand describes the melting rate caused by the pitch and heave of the iceberg, and the second summand describes the melting rate due to the wave action itself. Empirical coefficients
describe the dependence of the pitch and heave velocity amplitudes on the wave amplitude and frequency. Symbol 〈 〉 means the averaging over the iceberg draft
, which is calculated using the formula
where the factor
describes the dependence of the wave-induced water velocities on the depth in deep water (
2).
The calculation of integral (22) leads to the formulas
Coefficients
and
reach a maximal value of 1.0 at
, and monotonically approach 0 at
. Finally, the wave-induced melting rate of a floating iceberg is expressed by the formula
with the wave correction factor
depending on the wave amplitude, wave frequency, and parameters characterizing the response of the iceberg on the wave action.
6. Discussion
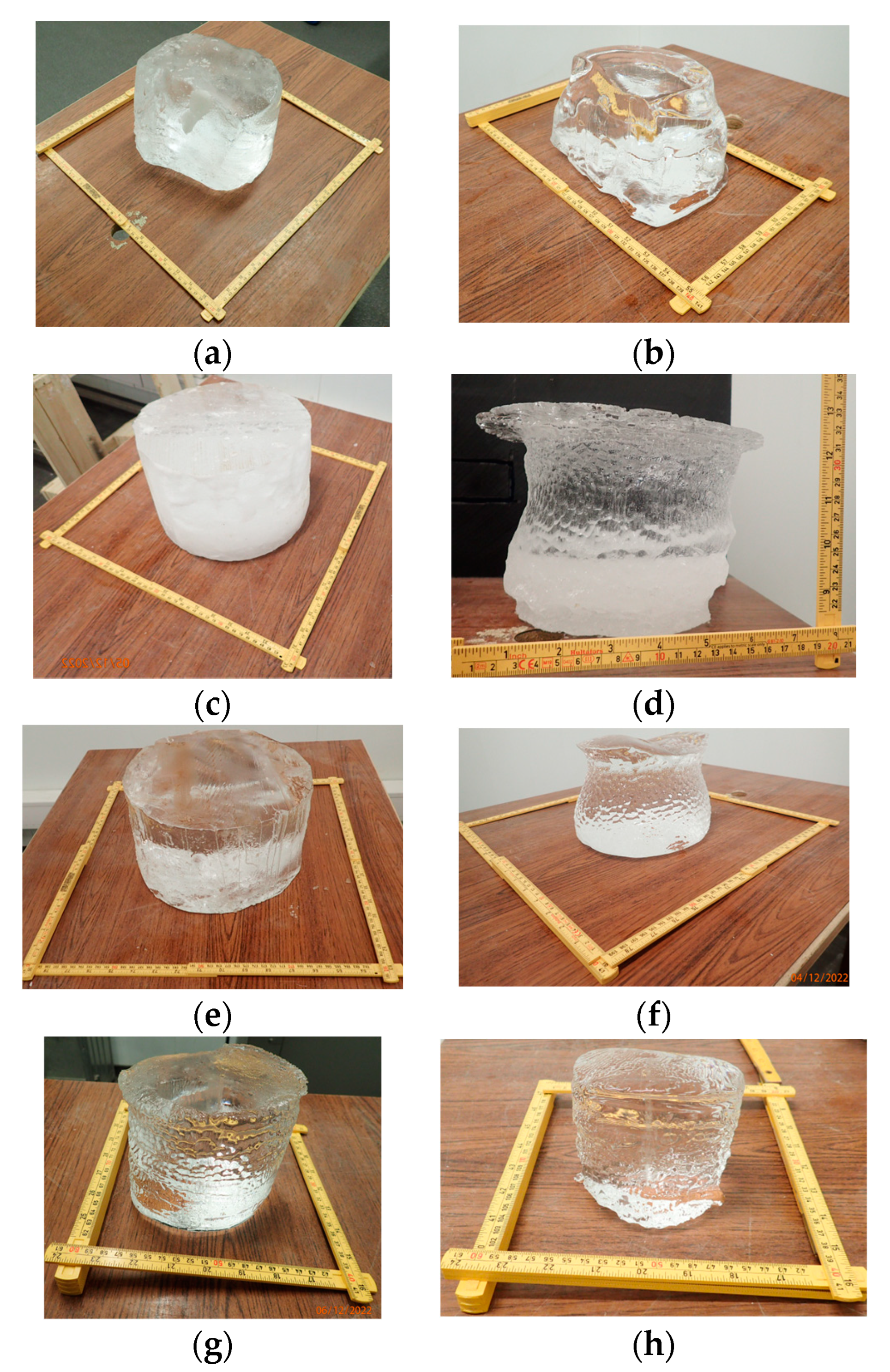
The initial shape of the icebergs was close to cylindrical. Melting influenced the changes in the iceberg shapes. In experiment 1, the melting of an iceberg in calm water affected the conical shape of the iceberg. In experiments 2–8, the melting of icebergs under wave conditions influenced the formation of ice caps and iceberg waists at the water level. The masses and vertical dimensions of icebergs were measured. The cylindrical iceberg model was used to calculate the effective horizontal dimensions of the icebergs characterized by the iceberg radius and the effective melting rates of the icebergs in the horizontal direction. This approach is used in simulations of iceberg drift and deterioration, since the melting process of real icebergs is very complex. Usually, iceberg dimensions and shapes are characterized by the iceberg mass and isotropic drag coefficients, and iceberg deterioration is described by the lateral and basal melting rates [
15,
16,
18,
19]. We therefore aim to contribute to the parametrization of these processes for relatively small icebergs observed in the Barents Sea.
There are physical limitations to using this approach. Icebergs of certain shapes (pinnacled, drydock, wedge shape) cannot be approximated by cylindrical bodies. Accordingly, when the shape of an initially cylindrical iceberg changes significantly, the cylindrical iceberg approximation becomes invalid. In cases where lateral melting predominates over basal melting, cylindrical icebergs become statically unstable. The instability causes the tilt and capsizing of the icebergs. The instability of cylindrical icebergs can be calculated for given dimensions of the icebergs [
41,
42].
Josberger and Martin [
31] used the Grashof number (
) to describe the transition to turbulence in a vertical boundary layer near an ice wall:
where
is the length of laminar boundary layer. Laminar flow becomes turbulent at
. In our experiments, thermal driving
changed from
to
(
Table 4). The critical length
changed, respectively, from 25 cm to 20 cm. The direct use of the Grashof criterion is not valid for our experiments, since icebergs melted not only from the sides but also from below. The boundary layer extended from the bottom of the icebergs along the side surface of the icebergs. The movement of melt water near the ice surface with a large curvature at the edges of the side and bottom surfaces of icebergs can be accompanied by the formation of vortices disrupting the flow in the boundary layer.
The vertical velocity of melt water in the boundary layer was estimated in [
37,
38] using the formulas
Assuming
cm,
cm, and
, we estimated
mm/s and
mm/s.
ADV measurements showed a background current velocity in the tank of 2–3 mm/s in experiments 1, 2, and 4, and less than 1 mm/s in experiment 3. Background currents could influence convective currents in the boundary layer, because their speeds were comparable to the speed of water in the boundary layers. The Reynolds number of the background current is determined as
. The Reynolds number is about 100 at
mm/s and
cm. Currents with
lead to the formation of oscillating ring vortexes near the cylinders [
43].
The effects discussed above explain that the structure of the boundary layers near the surfaces of icebergs is similar to the structure of the turbulent boundary layers observed in the experiments of Josberger and Martin [
31] and differs from the laminar boundary layer. The formation of vortices with the participation of melt water increased the thermal energy spent on heating the melt water trapped in the vortices.
It is known that scallops are formed on the ice surface under the influence of water flow [
33,
44]. Bushuk et al. [
33] studied vortex structures that promote the formation and development of scallops in water flow, with speeds from 16 cm/s to 1 m/s at
. The scallop wave lengths (
) and roughness (
) were, respectively, about 10 cm and 1 cm. The scallops’ Reynolds numbers
were estimated to be about 3000 with
cm/s and
cm.
We observed the formation of scallops on submerged surfaces of icebergs in all experiments (2–8), where waves acted on icebergs. The sizes of the scallops in these experiments were similar. In experiment 1, which was conducted in still water, no scallops were formed. The cyclic movement of the icebergs relative to the water influenced the Stokes boundary layer near the surface of the icebergs. The stability of the boundary layer is characterized by the Taylor number
and the Reynolds number
, where
is the amplitude of the water motion near the iceberg surface. For the estimates, we assumed that
due to the reflection of waves from the iceberg and the pitch and heave of the iceberg. Seminara and Hall [
45] estimated the critical Taylor number for the centrifugal instability of Stokes layer near an oscillating cylinder to be about 164. Blondeaux and Vittory [
46] estimated the critical Reynolds number for the momentary instability of the Stokes boundary layer near an oscillating plate to be about 85. The values of
and
obtained using
Table 1 and
were, respectively, below 3 and 30 for experiments 2 and 4–8 and around 22 and 83 in experiment 3. This means that the boundary layers were stable. We hypothesize that ice melt contributes to the observed instability of the ice–water interface, leading to the formation of scallops on the surfaces of icebergs under wave action.
Table 4 shows the ratios
in experiments 1–8. The two-hour experiments 5–8, with different wave frequencies, demonstrated a decrease in
with a decreasing wave frequency. In experiments 2–4, the wave frequencies were higher but the
was lower than in experiments 5–8. This is explained by an additional increase in
caused by the mixing of water in experiment 2 and the rolling of waves on the surface of the iceberg in experiment 3. In experiment 4, the iceberg was protected on the sides by a plastic barrier. The protection contributed to significant reductions in the rates of vertical and lateral melting. In experiment 1, which was conducted in still water, the
was minimal. We also observed an increase in the rate of lateral melting with depth, leading to a conical shape of the lateral surface of the iceberg over time.
Figure 13a shows the dependence of
on the dimensionless wave frequency
, where
is the eigen frequency of heave oscillations of a cylindrical iceberg, determined using Formula (1). A linear approximation of the dependence
from
obtained for experiments 5–8 is given by the formula
Using experimental data, the melting rates
,
, and
, determined using Formulas (10), (15), and (18), were calculated. The freezing point of the ambient sea water was set to
according to the 33.5 ppt salinity of sea water used in the experiments. The ambient sea water temperature
was placed equal to the mean temperatures
measured using the temperature string TS1 given in
Table 2. Thermal driving
, given in
Table 7, was calculated using Formula (9) and the temperatures given in
Table 2. The temperature at the ice–water interface
is required to calculate thermal driving
. We assume that the mean interface temperature
varied from
to
in experiments 1–3 and 5–8, and in experiment 4, the temperature was around
. The accuracy of the temperature measurements using FBG sensors does not allow for obtaining
values with a higher accuracy. Thermal driving
, given in
Table 7, was calculated with
.
Table 7 shows the measured melting rates
compared to the calculated melting rates
. The melting rates
and
were higher than 1 cm/h for all values of thermal driving
, which was calculated using
. Therefore, we came to the conclusion that Formula (10) most closely matches the conditions of our experiments. Assuming a rough iceberg surface, we calculated
using Formula (20) with
mm. The values of
and
were taken from
Table 1, and the thermal driving
was calculated with
and
. The wave correction factor
in Formula (24) was calculated using the formula
where the values of
and
are given in
Table 7.
Table 5 shows the values of
and
calculated at
.
Blue and yellow points in
Figure 13b show the factor
versus the dimensionless wave frequency
calculated at
and
. Experiment 1 is not included, because it was conducted in still water. Linear interpolations of the dependences are shown with blue and yellow lines for experiments 5–8. The black line shows the mean interpolation within the range of temperature
. The black line is described by the formula
Formula (38) does not describe the dependence of
on the wave amplitude, since in experiments 5–8, the wave amplitudes were almost similar. Experiment 3 cannot be used to describe this dependence due to the wave rolling effect. New experiments are needed to describe the dependence of
on the wave amplitude.
The equipment used in the experiments imposed a number of restrictions on the range of studied dependencies and phenomena. The experiments were carried out in a narrow wave tank, the dimensions of which corresponded to the size of cold laboratory at UNIS. Technical difficulties associated with the design of the wavemaker did not allow for the generation of waves of small amplitudes. The walls of the tank influenced the interaction of waves with the icebergs. The small size of the icebergs imposed restrictions on the wave amplitudes, since as the wave amplitudes increased, water splashed onto the surface of the icebergs, significantly changing the rate of ice melting. At the same time, the range and quality of the research carried out can be improved through the more detailed control of the iceberg shape using 3D laser scanning and photogrammetry, measurement of iceberg accelerations, visualization of the movement of melt water in the boundary layer, and more accurate measurements of wave amplitudes.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}