
Coupled Inversion of Amplitudes and Traveltimes of Primaries and Multiples for Monochannel Seismic Surveys

Abstract
:1. Introduction
2. Materials and Methods
2.1. Inversion Strategy
2.2. Modeling Amplitudes and Traveltimes
2.3. Inverting Amplitudes and Traveltimes
2.4. Algorithm Details
3. Application to Synthetic and Real Data
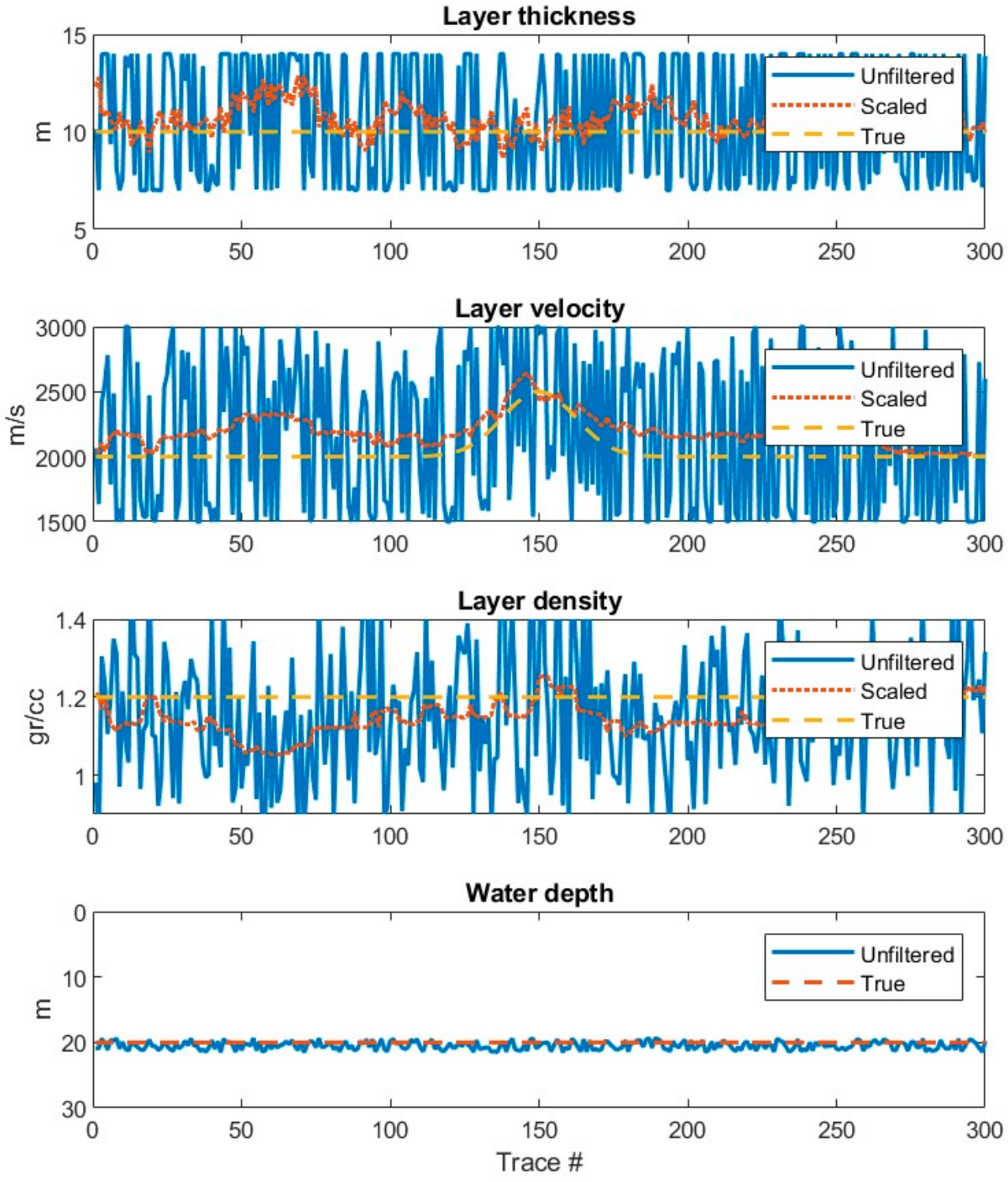
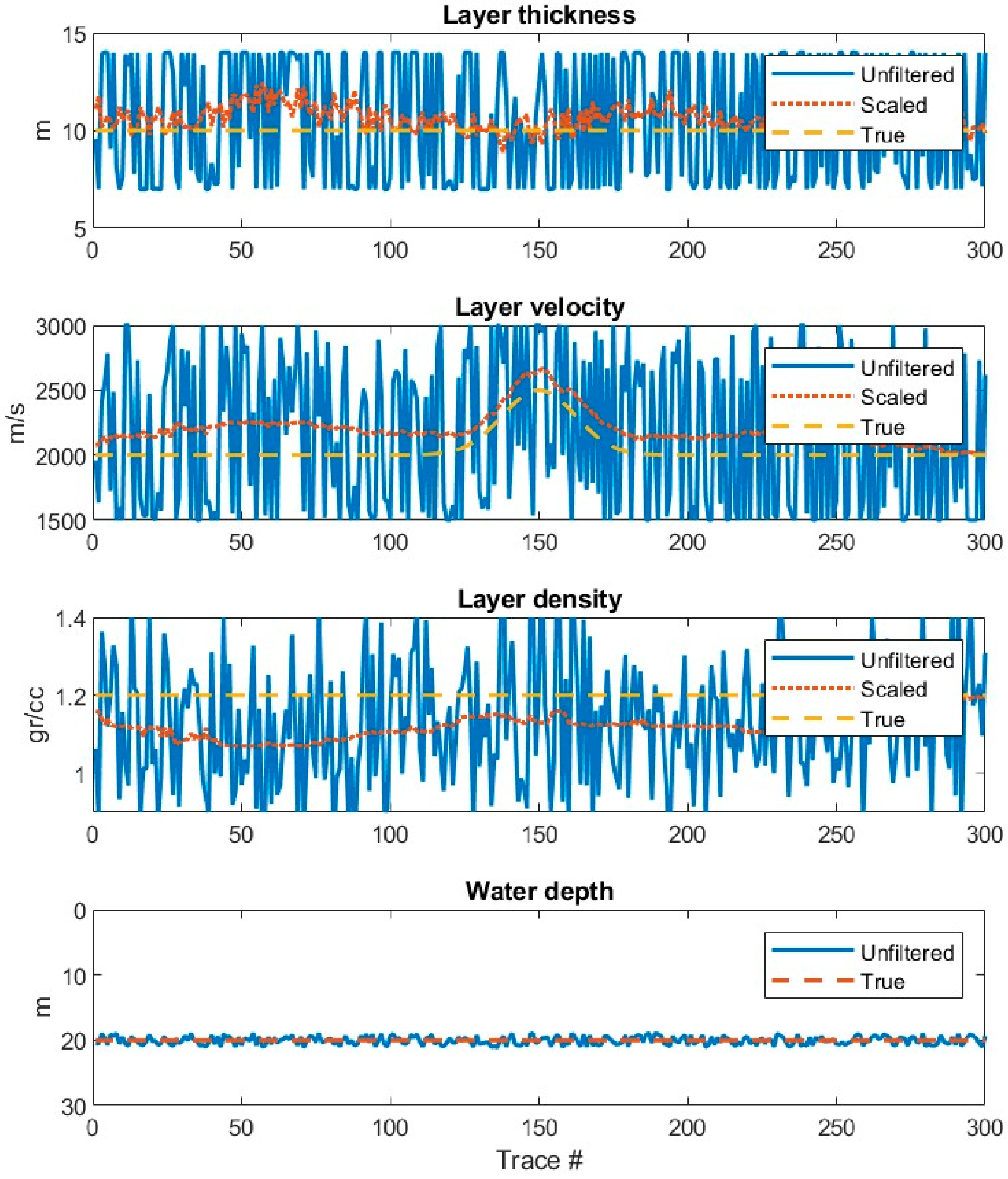
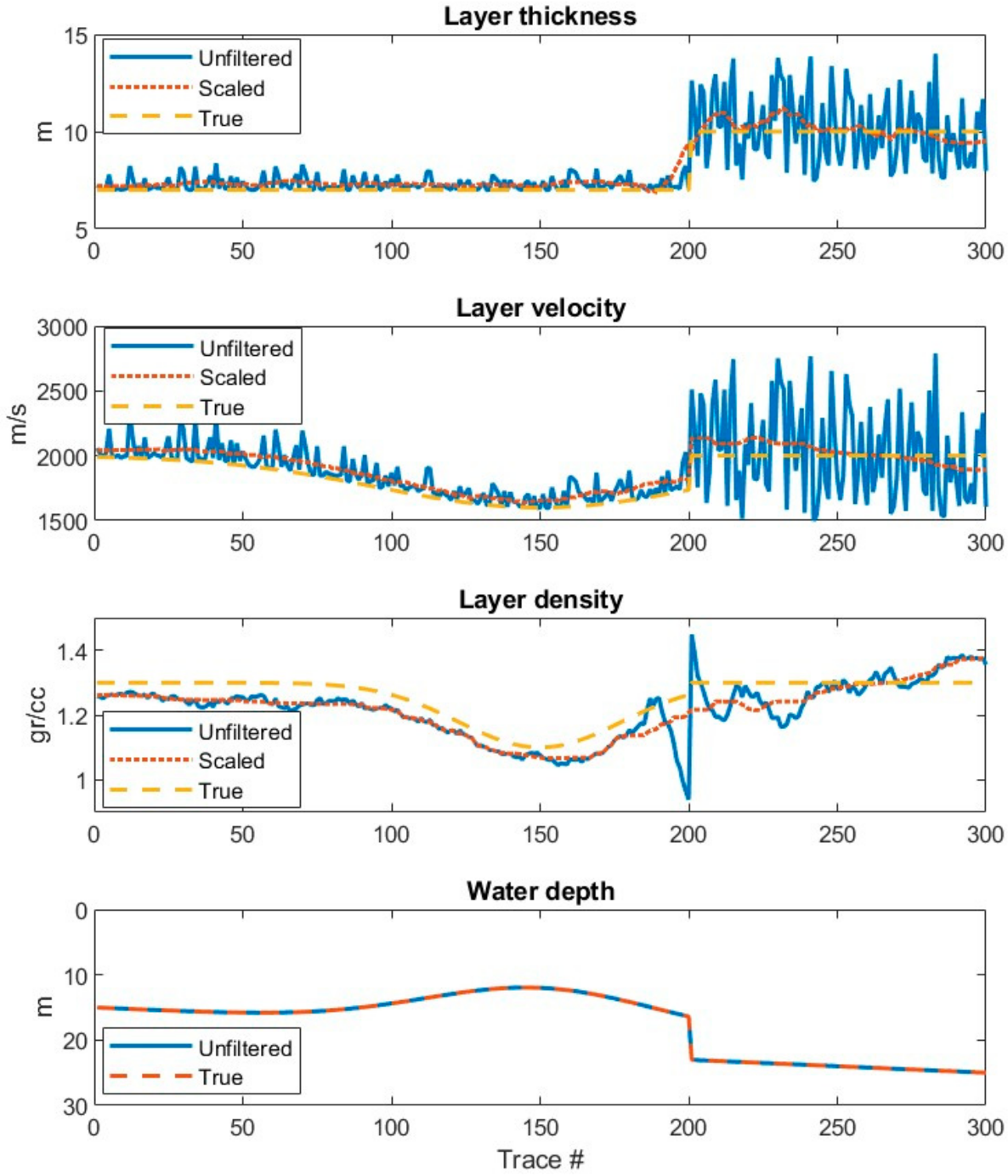
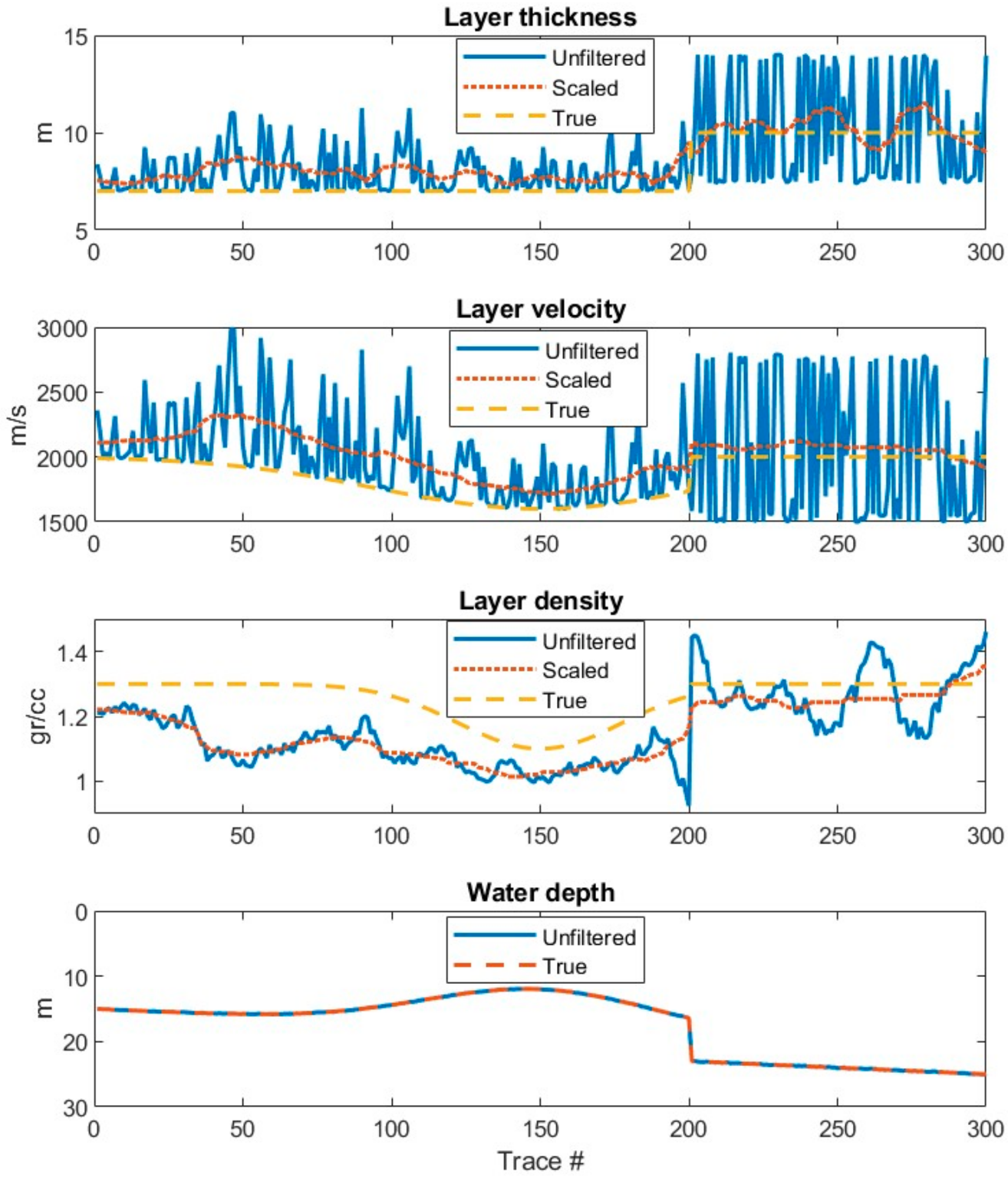
3.1. Validation by Synthetic Data
3.2. Application to Real Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, H.; Wang, Z.; Zhao, S.; He, K. Accurate multiple ocean bottom seismometer positioning in shallow water using GNSS/Acoustic technique. Sensors 2019, 19, 1406. [Google Scholar] [CrossRef]
- Verbeek, N.H.; McGee, T.M. Characteristics of high-resolution marine reflection profiling sources. J. Appl. Geophys. 1995, 33, 251–269. [Google Scholar] [CrossRef]
- Sears, T.J.; Barton, P.J.; Singh, S.C. Elastic full-waveform inversion of multi-component ocean-bottom cable seismic data: Application to Alba Field. Geophysics 2010, 75, R109–R119. [Google Scholar] [CrossRef]
- Sills, G.C.; Wheeler, S.J. The significance of gas for offshore operations. Cont. Shelf Res. 1992, 12, 1239–1250. [Google Scholar] [CrossRef]
- Soupios, P.S. Prospection of wind farm site using geophysics. In Proceedings of the 8th Congress of the Balkan Geophysical Society, Chania, Greece, 4–8 October 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Szklarz, S.P.; Barros, E.; Berawala, D.; Hegstad, B.K.; Petvipusit, K.R. How could reservoir engineers harvest wind energy? Practical parametrization approaches for wind farm layout optimization. In Proceedings of the EAGE GET Meeting, Hague, The Netherlands, 7–9 November 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Park, J.S.; Lee, D.H.; Yi, M.S. Structural Analysis Procedure and Applicability Review of Spudcan Considering Soil Types. J. Mar. Sci. Eng. 2023, 11, 1833. [Google Scholar] [CrossRef]
- Cui, L.; Aleem, M.; Shivashankar; Bhattacharya, S. Soil–Structure Interactions for the Stability of Offshore Wind Foundations under Varying Weather Conditions. J. Mar. Sci. Eng. 2023, 11, 1222. [Google Scholar] [CrossRef]
- Müller, C.; Milkereit, B.; Bohlen, T.; Theilen, F. Towards high-resolution 3D marine seismic surveying using Boomer sources. Geophys. Prospect. 2002, 50, 517–526. [Google Scholar] [CrossRef]
- Müller, C.; Woelz, S.; Ersoy, Y.; Boyce, J.; Jokisch, T.; Wendt, G.; Rabbel, W. Ultra-high-resolution 2D-3D seismic investigation of the Liman Tepe/Karantina Island archeological site (Urla/Turkey). J. Appl. Geophys. 2009, 68, 124–134. [Google Scholar] [CrossRef]
- Gordon, J.; Gillespie, D.; Potter, J.; Frantzis, A.; Simmonds, M.P.; Swift, R.; Thompson, D. A review of the effects of seismic surveys on marine mammals. Mar. Technol. Soc. J. 2003, 37, 16–34. [Google Scholar] [CrossRef]
- Duchesne, M.J.; Bellefleur, G. Processing of Single-Channel, High-Resolution Seismic Data Collected in the St. Lawrence Estuary, Quebec; Geological Survey of Canada: Ottawa, ON, Canada, 2007; p. 11. [Google Scholar] [CrossRef]
- Ruppel, C.D.; Weber, T.C.; Staaterman, E.R.; Labak, S.J.; Hart, P.E. Categorizing active marine acoustic sources based on their potential to affect marine mammals. J. Mar. Sci. Eng. 2022, 10, 1278. [Google Scholar] [CrossRef]
- Henriet, J.P.; Verschuren, M.; Versteeg, W. Very high resolution 3D seismic reflection imaging of small-scale structural deformation. First Break 1992, 10. [Google Scholar] [CrossRef]
- Gutowski, M.; Bull, J.M.; Henstock, T.J.; Dix, J.K.; Hogarth, P.; Leighton, T.G.; White, P.R. Chirp sub-bottom profiler source signature design and field testing. Mar. Geophys. Res. 2002, 23, 481–492. Available online: https://resource.isvr.soton.ac.uk/staff/pubs/PubPDFs/Pub2555.pdf (accessed on 27 March 2024). [CrossRef]
- Zecchin, M.; Baradello, L.; Brancolini, G.; Donda, F.; Rizzetto, F.; Tosi, L. Sequence stratigraphy based on high-resolution seismic profiles in the late Pleistocene and Holocene deposits of the Venice area. Mar. Geol. 2008, 253, 185–198. [Google Scholar] [CrossRef]
- Kim, Y.J.; Shin, S.R.; Chun, J.H.; Yoo, D.G. Boomer for Marine Seismic Survey. U.S. Patent US8107323B1, 31 January 2012. Available online: https://patents.google.com/patent/US8107323B1/en (accessed on 27 March 2024).
- Crocker, S.E.; Fratantonio, F.D. Characteristics of Sounds Emitted During High-Resolution Geophysical Surveys; NUWC-NPT Technical Report 12203; Newport: Irvine, CA, USA, 2016; 266p, Available online: https://apps.dtic.mil/sti/pdfs/AD1007504.pdf (accessed on 27 March 2024).
- de Oliveira Santos, I.; Landim Dominguez, J.M. Mapeamento estratigráfico utilizando sísmica de alta resolução no trecho da futura Ponte Salvador-Itaparica, Bahia, Brasil. Geol. USP Série Cient. 2019, 19, 85–98. [Google Scholar] [CrossRef]
- Zheng, J.; Li, L.; Xie, J.; Yan, T.; Jiang, B.; Huang, X.; Hui, G.; Li, T.; Wen, M.; Huang, Y. The application of a homemade boomer source in offshore seismic survey: From field data acquisition to post-processing. J. Appl. Geophys. 2023, 210, 104945. [Google Scholar] [CrossRef]
- Woods, L. Geophysics as a tool for pipeline design in challenging terrain. In Proceedings of the 20th European Meeting on Environmental and Engineering Geophysics, Athens, Greece, 14–18 September 2014; pp. 1–2. [Google Scholar] [CrossRef]
- Dong, Y.; Zhao, E.; Cui, L.; Li, Y.; Wang, Y. Dynamic Performance of Suspended Pipelines with Permeable Wrappers under Solitary Waves. J. Mar. Sci. Eng. 2023, 11, 1872. [Google Scholar] [CrossRef]
- Mao, L.; Stewart, R.R. Near-surface imaging of the shallow sediments of Galveston Bay, Texas. In Proceedings of the SEG Annual Meeting, Beijing, China, 24–29 September 2017; pp. 5958–5962. [Google Scholar] [CrossRef]
- Vesnaver, A.; Busetti, M.; Baradello, L. Chirp data processing for fluid flow detection at the Gulf of Trieste (Northern Adriatic Sea). Bull. Geophys. Oceanogr. 2021, 62, 365–386. [Google Scholar] [CrossRef]
- Dusart, J.; Tarits, P.; Fabre, M.; Marsset, B.; Jouet, G.; Erhold, A.; Riboulot, V.; Baltzer, A. Characterization of gas-bearing sediments in coastal environment using geophysical and geotechnical data. Near Surf. Geophys. 2022, 20, 478–493. [Google Scholar] [CrossRef]
- Maine, H. Common reflection point horizontal data stacking techniques. Geophysics 1962, 27, 753–1027. [Google Scholar] [CrossRef]
- Hubral, P.; Krey, T. Interval Velocities from Seismic Reflection Time Measurements; SEG: Tulsa, OK, USA, 1980; p. 203. ISBN 0-931830-13-3. [Google Scholar] [CrossRef]
- Yilmaz, O. Seismic Data Analysis; SEG: Tulsa, OK, USA, 2021; 2065p, ISBN 978-1-56080-094-1 (print), 978-1-56080-158-0 (online). [Google Scholar]
- Alkhalifah, T.A. Full Waveform Inversion in an Anisotropic World; Education Tour Series; EAGE: Houten, The Netherlands, 2014; 197p, ISBN 9789462822023. [Google Scholar]
- Vesnaver, A.; Baradello, L. Shallow velocity estimation by multiples for monochannel Boomer surveys. Appl. Sci. 2022, 12, 3046. [Google Scholar] [CrossRef]
- Vesnaver, A.; Baradello, L. Tomographic joint inversion of direct arrivals, primaries and multiples for monochannel marine surveys. Geosciences 2022, 12, 219. [Google Scholar] [CrossRef]
- Vesnaver, A.; Baradello, L. Sea floor characterization by multiples’ amplitudes in monochannel surveys. J. Mar. Sci. Eng. 2023, 11, 1662. [Google Scholar] [CrossRef]
- Bull, J.M.; Quinn, R.; Dix, J.K. Reflection coefficient calculation from marine high resolution seismic reflection (Chirp) data and application to an archaeological case study. Mar. Geophys. Res. 1998, 20, 1–11. [Google Scholar] [CrossRef]
- Claerbout, J. Imaging the Earth’s Interior; Blackwell: Oxford, UK, 1985; 274p. [Google Scholar]
- van der Sluis, A.; van der Vorst, H.A. Numerical solution of large, sparse linear systems arising from tomographic problems. In Seismic Tomography; Nolet, G., Ed.; Reidel: Hanam, Republic of Korea, 1987; pp. 49–83. [Google Scholar] [CrossRef]
- Červený, V.; Soares, J.E. Fresnel volume ray tracing. Geophysics 1992, 57, 902–915. [Google Scholar] [CrossRef]
- Monk, D.J. Fresnel-zone binning: Fresnel-zone shape with offset and velocity function. Geophysics 2010, 75, T9–T14. [Google Scholar] [CrossRef]
- Orfanidis, S.J. Introduction to Signal Processing; Prentice Hall: Upper Saddle River, NJ, USA, 1996; 795p, Available online: http://www.ece.rutgers.edu/~orfanidi/intro2sp (accessed on 27 March 2024).
- Schafer, R. What is a Savitzky-Golay filter? IEEE Signal Process. Mag. 2011, 28, 111–117. [Google Scholar] [CrossRef]
- Pellegrini, G.B.; Surian, N.; Albanese, D. Landslide activity in response to alpine deglaciation: The case of the Belluno Prealps (Italy). Geogr. Fis. E Din. Quat. 2006, 29, 185–196. [Google Scholar]
- Vesnaver, A.; Baradello, L. A workflow for processing monochannel Chirp and Boomer surveys. Geophys. Prospect. 2023, 71, 1387–1403. [Google Scholar] [CrossRef]
- Korenaga, J.; Holbrook, W.S.; Kent, G.M.; Kelemen, P.B.; Detrick, R.S.; Larsen, H.-C.; Hopper, J.R.; Dahl-Jensen, T. Crustal structure of the southeast Greenland margin from joint refraction and reflection seismic tomography. J. Geophys. Res. 2000, 105, 21591–21614. [Google Scholar] [CrossRef]
- Vesnaver, A.; Böhm, G.; Madrussani, G.; Petersen, S.A.; Rossi, G. Tomographic imaging by reflected and refracted arrivals at the North Sea. Geophysics 1999, 64, 1852–1862. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
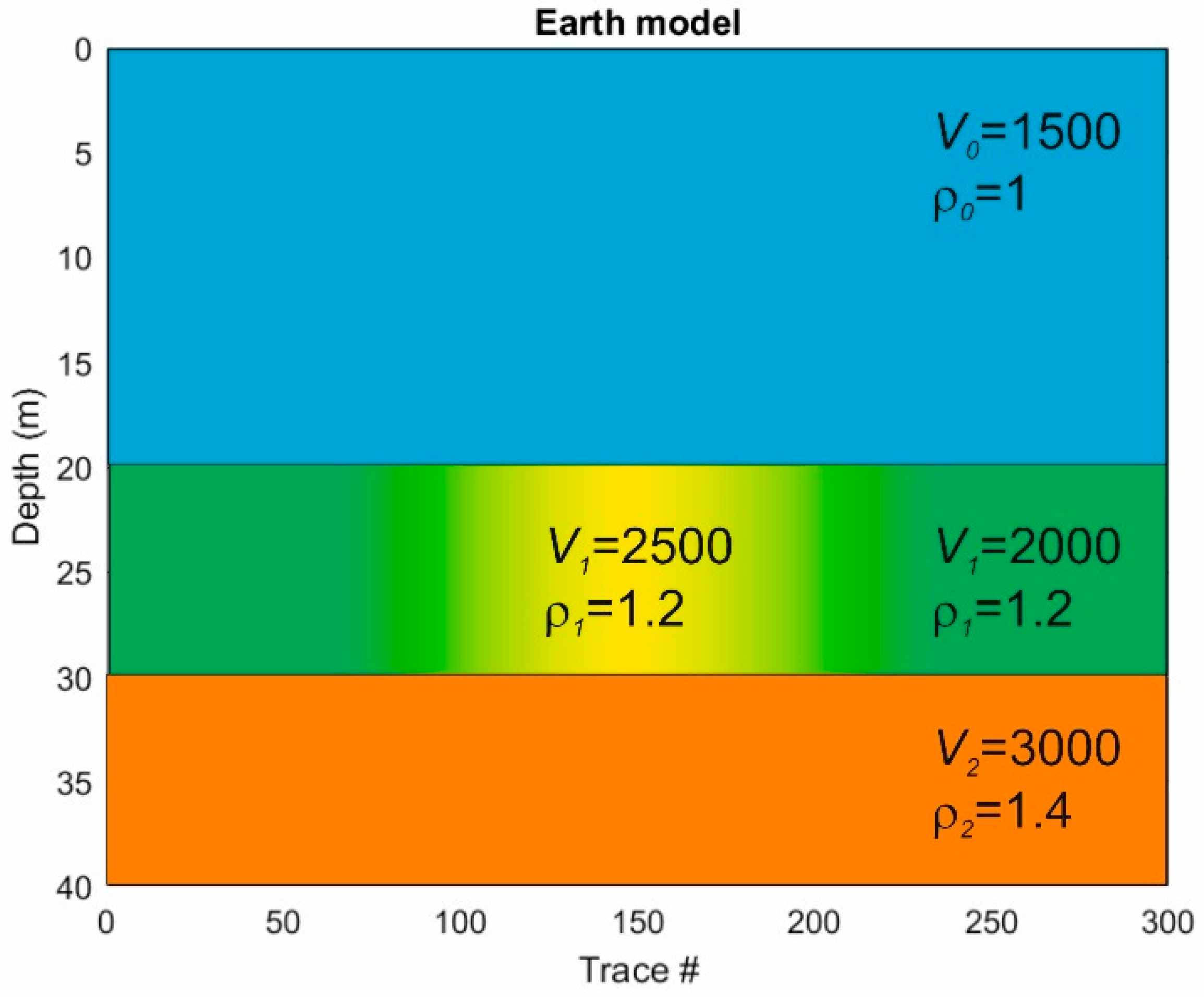
| Layer Name | Velocity (m/s) | Density (g/cc) | Thickness (m) |
|---|---|---|---|
| Seawater | 1500 | 1 | 20 |
| Sediments | 2000–2500 | 1.2 | 10 |
| Basement | 3000 | 1.4 | - |
| Layer Name | Velocity (m/s) | Density (g/cc) | Thickness (m) |
|---|---|---|---|
| Seawater | 1500 | 1 | 15–25 |
| Sediments | 1600–2000 | 1.1–1.3 | 7–10 |
| Basement | 3000 | 1.4 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vesnaver, A.; Baradello, L. Coupled Inversion of Amplitudes and Traveltimes of Primaries and Multiples for Monochannel Seismic Surveys. J. Mar. Sci. Eng. 2024, 12, 588. https://doi.org/10.3390/jmse12040588
Vesnaver A, Baradello L. Coupled Inversion of Amplitudes and Traveltimes of Primaries and Multiples for Monochannel Seismic Surveys. Journal of Marine Science and Engineering. 2024; 12(4):588. https://doi.org/10.3390/jmse12040588
Chicago/Turabian StyleVesnaver, Aldo, and Luca Baradello. 2024. "Coupled Inversion of Amplitudes and Traveltimes of Primaries and Multiples for Monochannel Seismic Surveys" Journal of Marine Science and Engineering 12, no. 4: 588. https://doi.org/10.3390/jmse12040588