
Graph Search-Based Path Planning for Automatic Ship Berthing



Abstract
1. Introduction
2. Theoretical Background
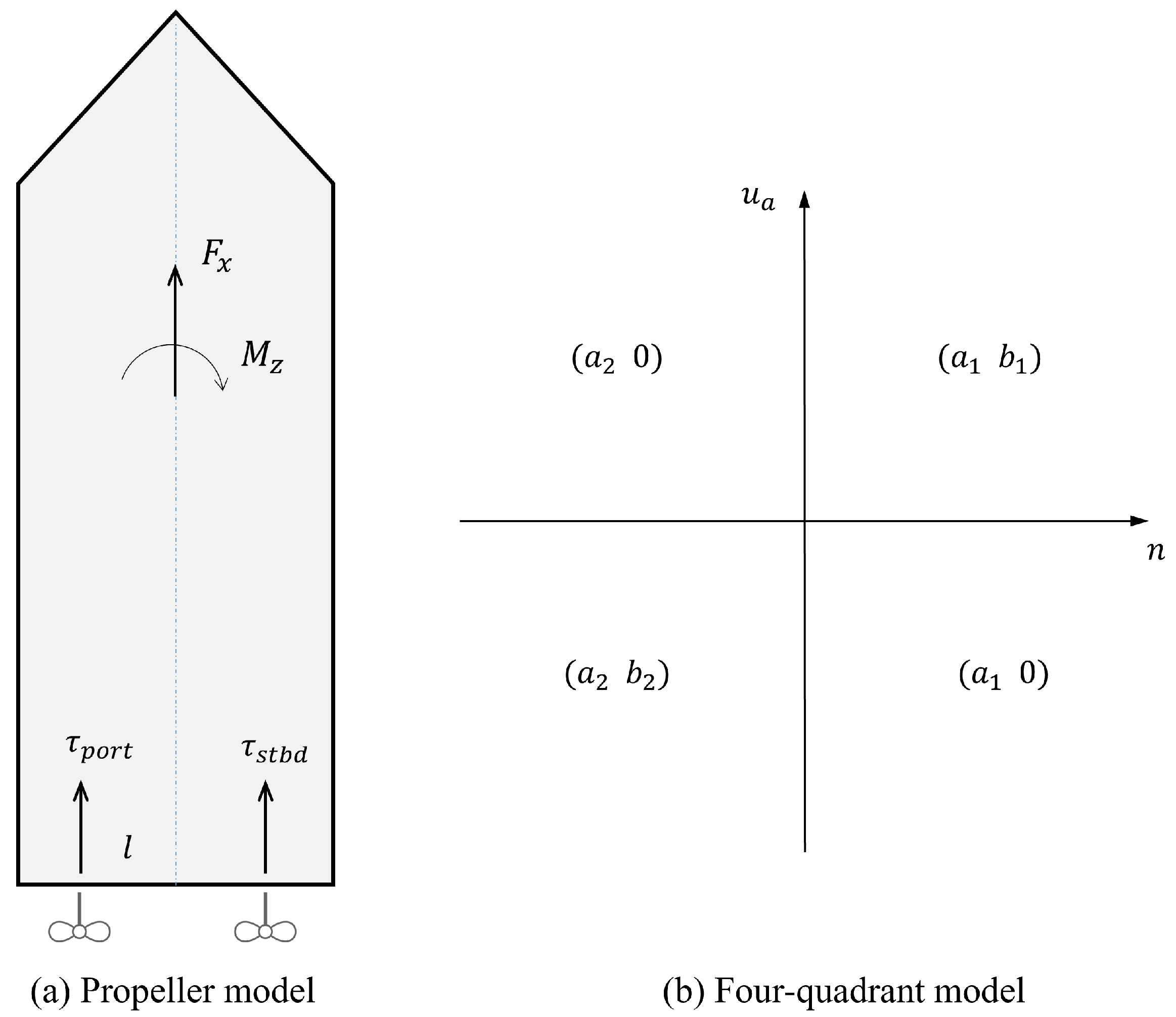
2.1. Modelling and Identification
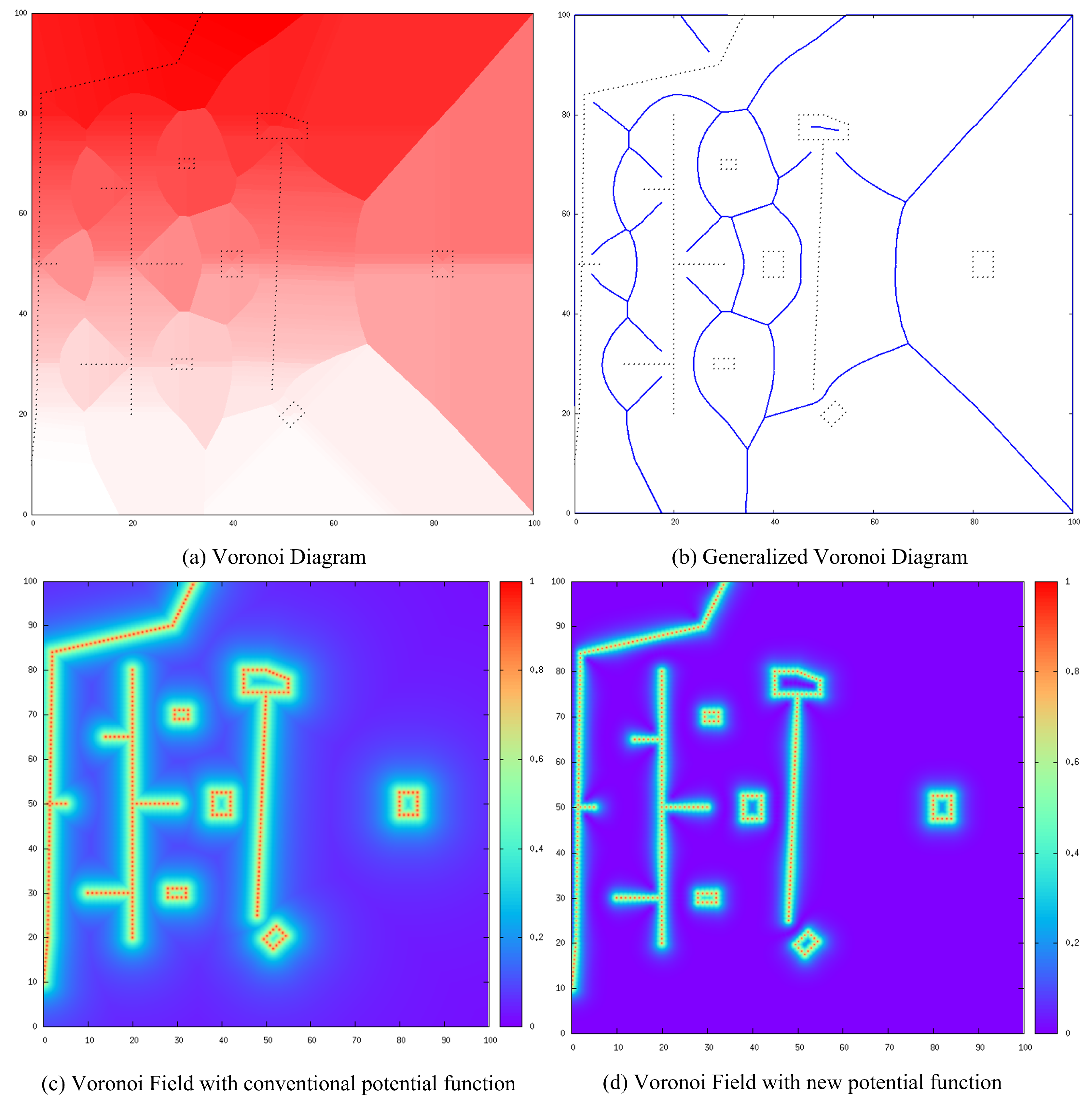
2.2. Generalized Voronoi Diagram (GVD)
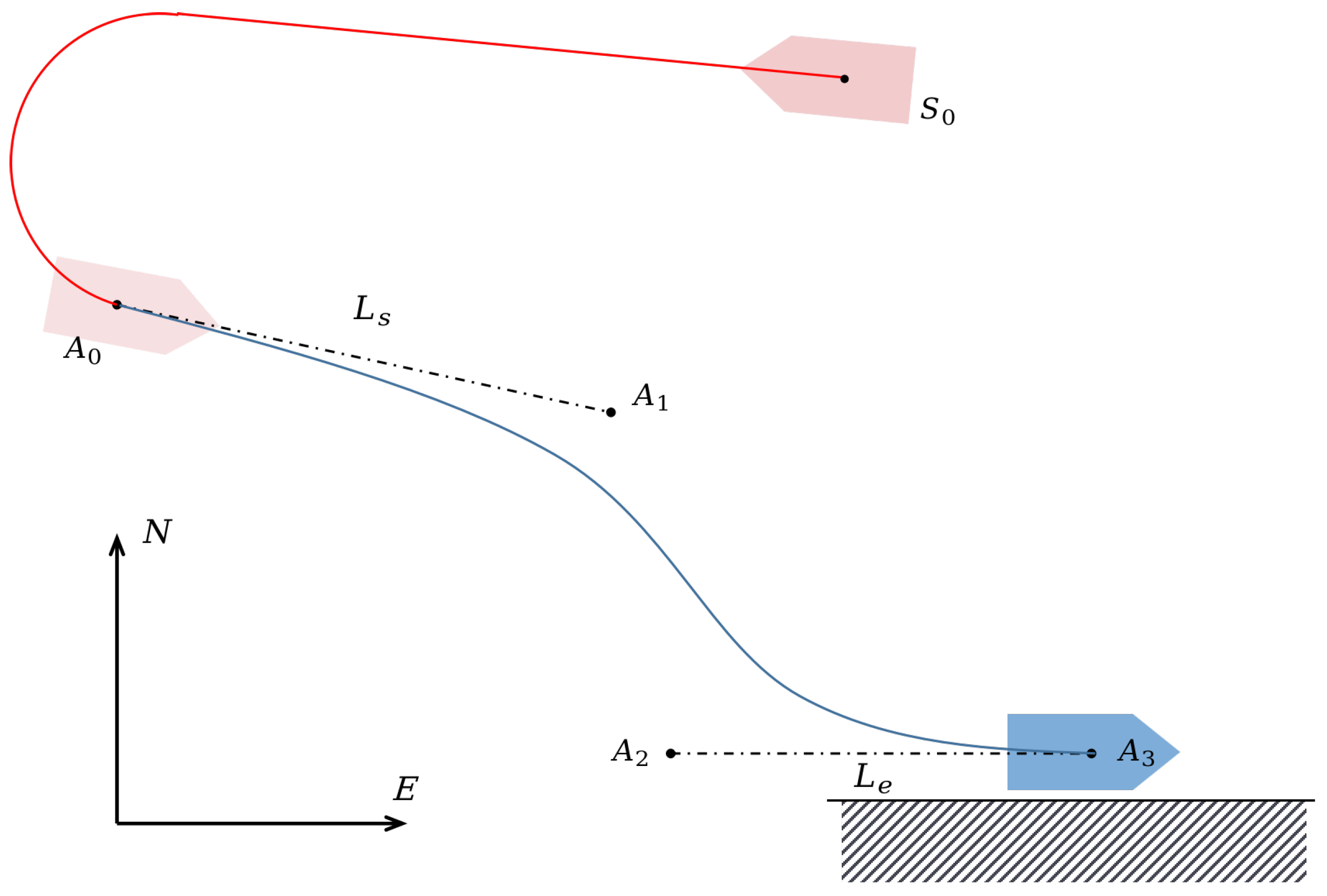
2.3. Path Planning at the Unberthing Phase
2.4. Hybrid A* Search Method
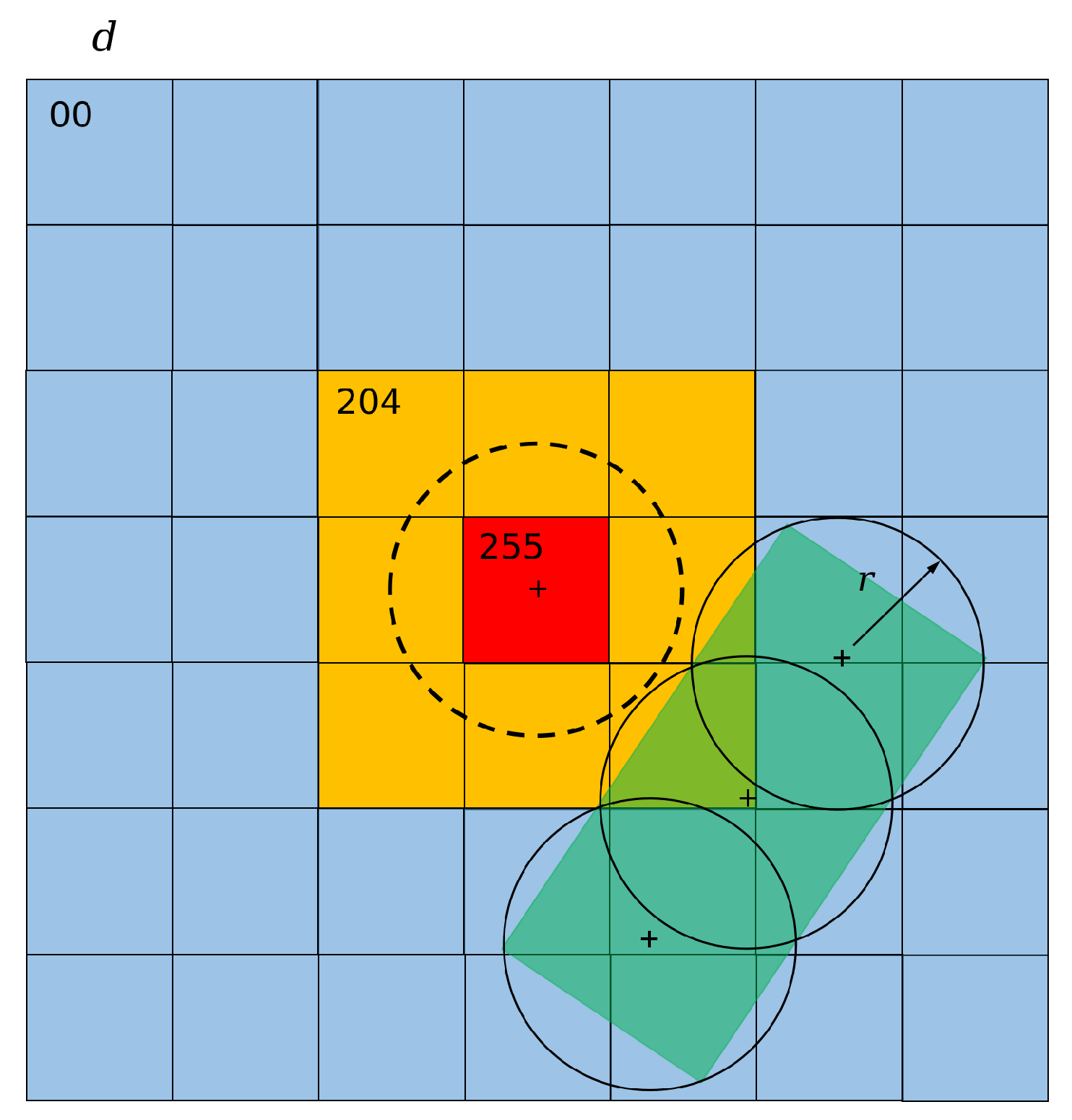
2.4.1. Costmap and Single-Source Shortest Path (SSSP) Map
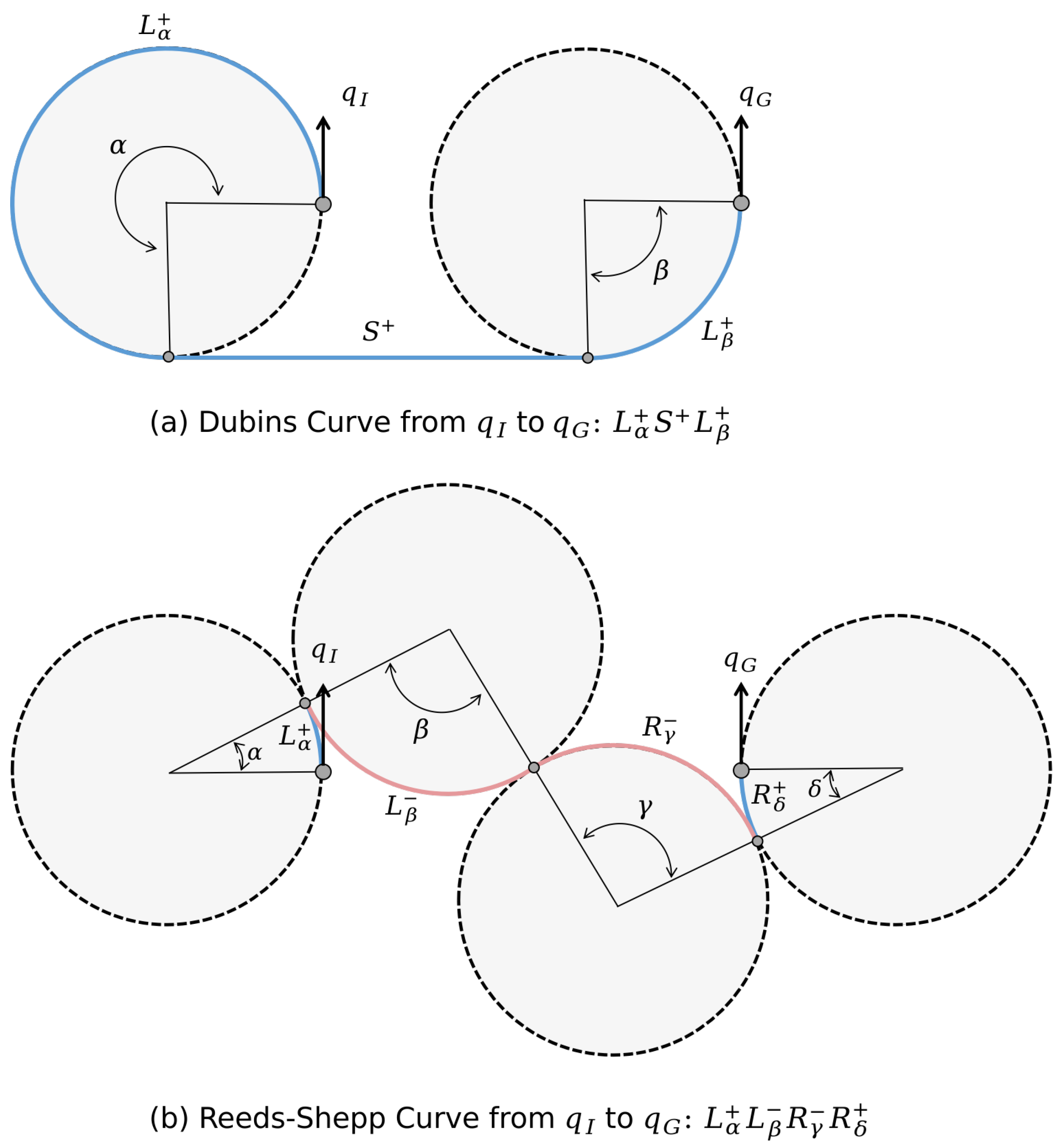
2.4.2. Dubins and Reeds–Shepp Curves
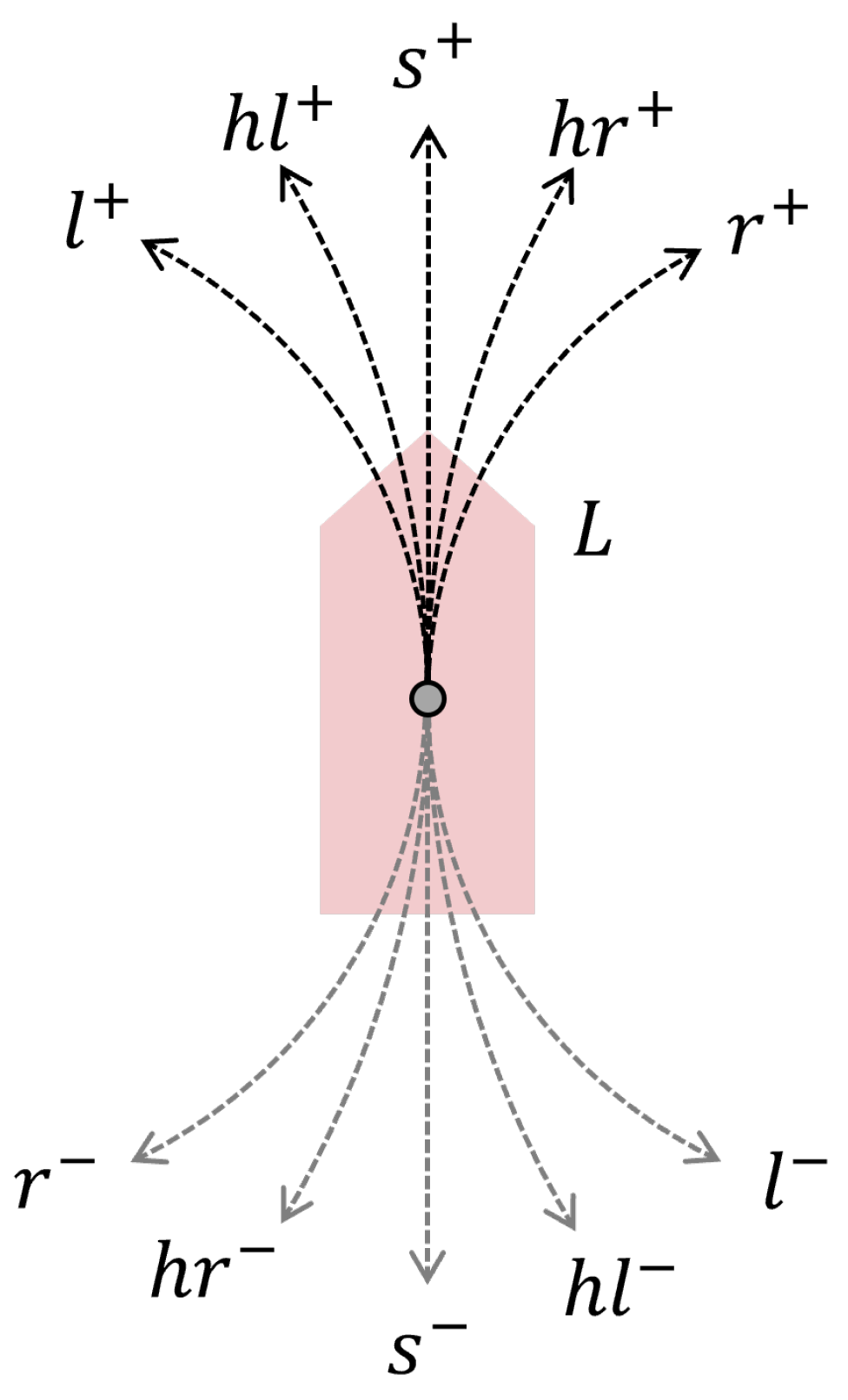
2.4.3. Search Space Representation
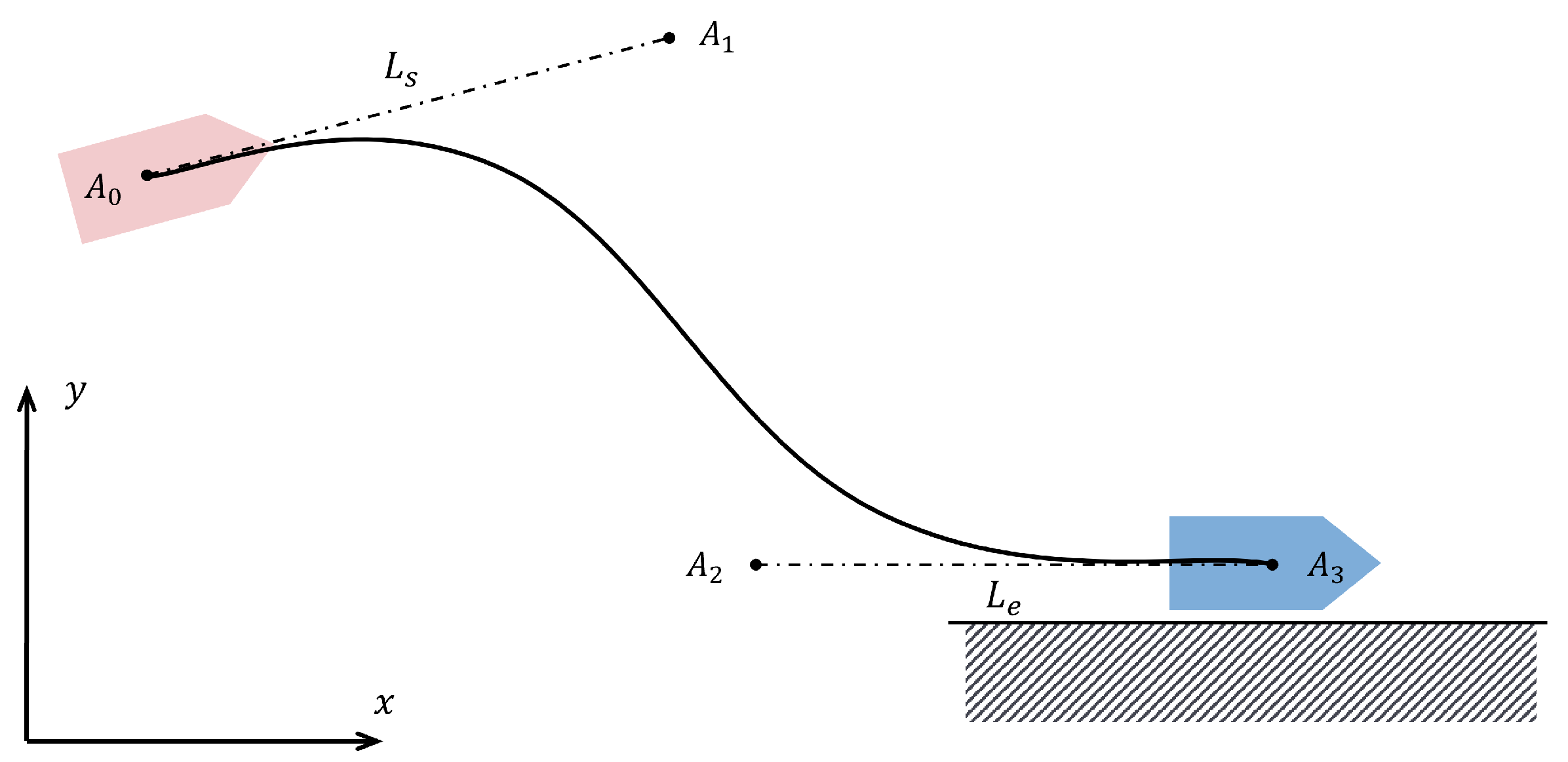
2.5. Bézier Curve
2.6. Path-Following Method
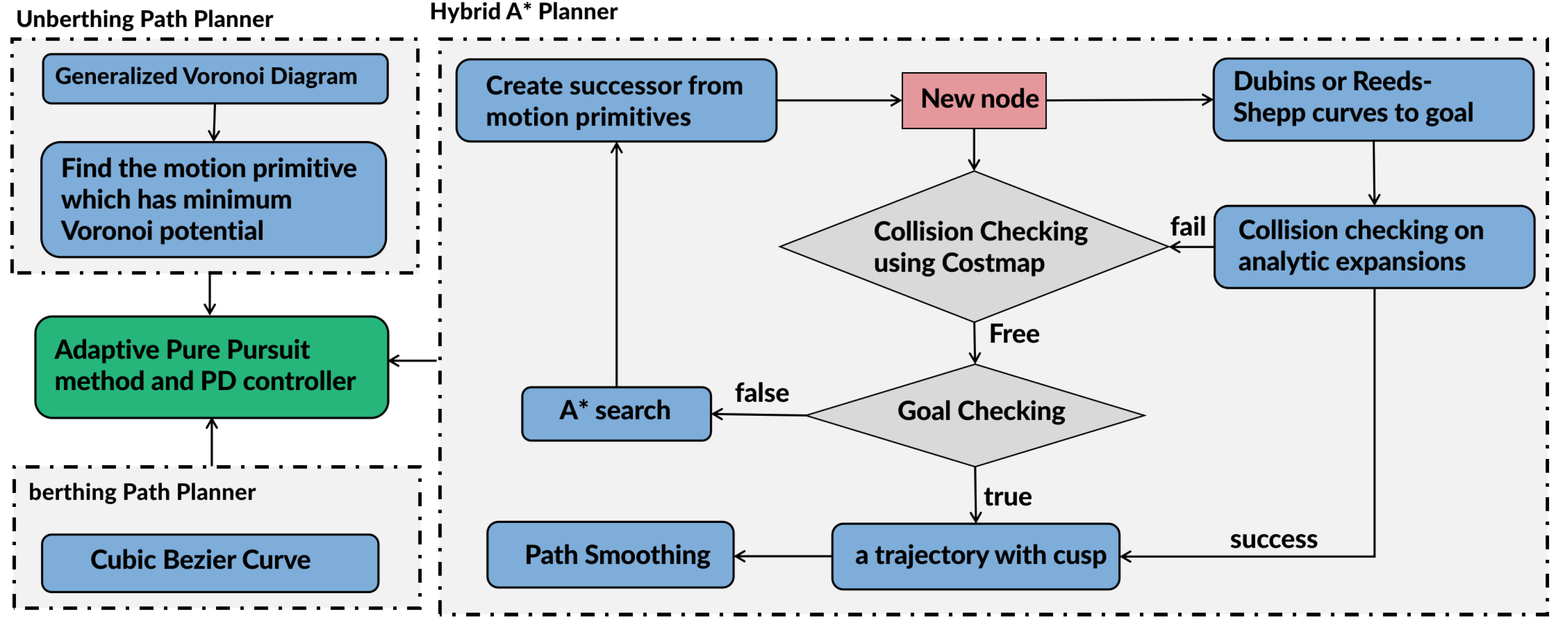
2.7. Architecture of Automatic Berthing Algorithm
3. Case Study: Simulations and Field Trials
3.1. Simulation Results
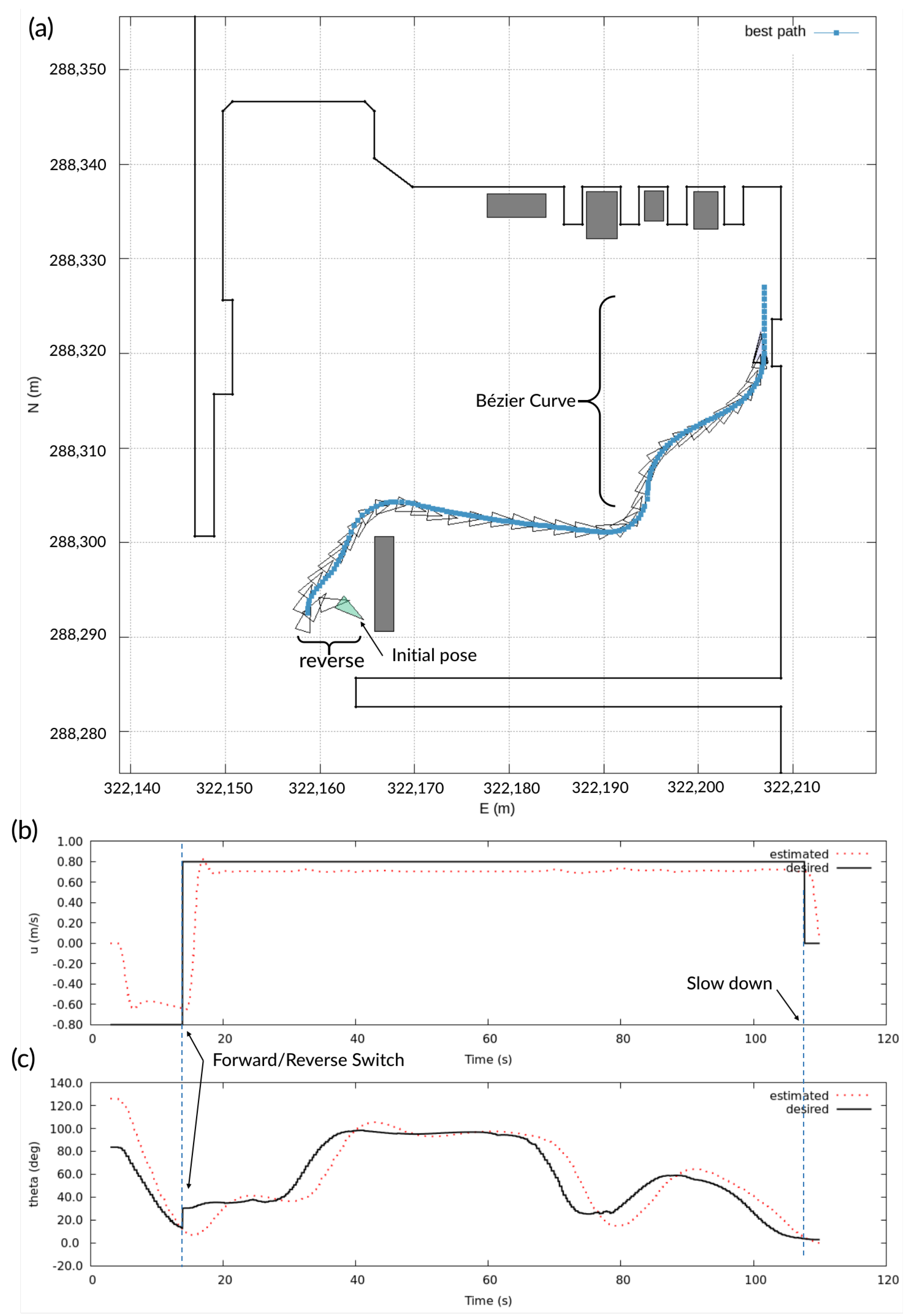
3.1.1. Case 01
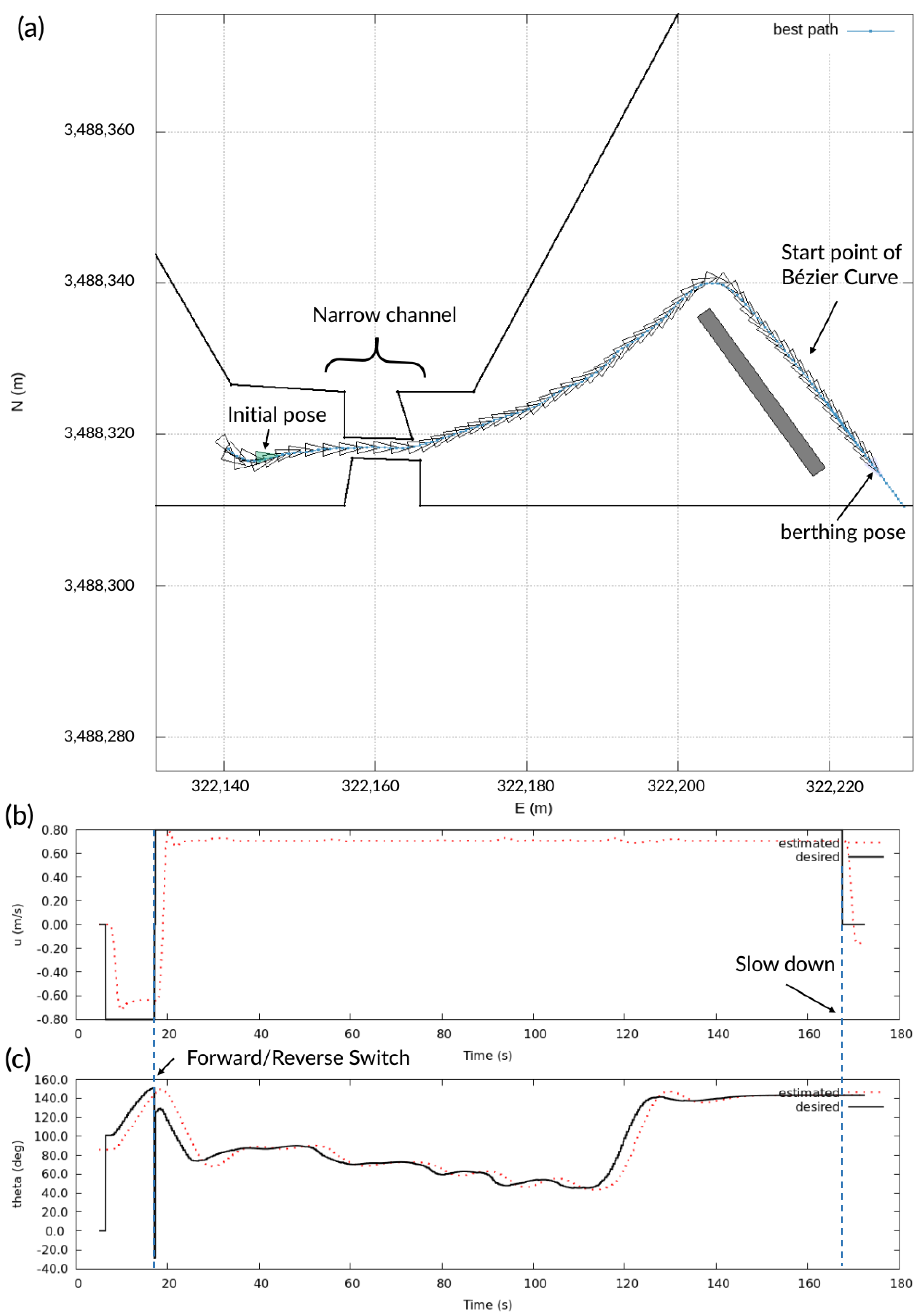
3.1.2. Case 02
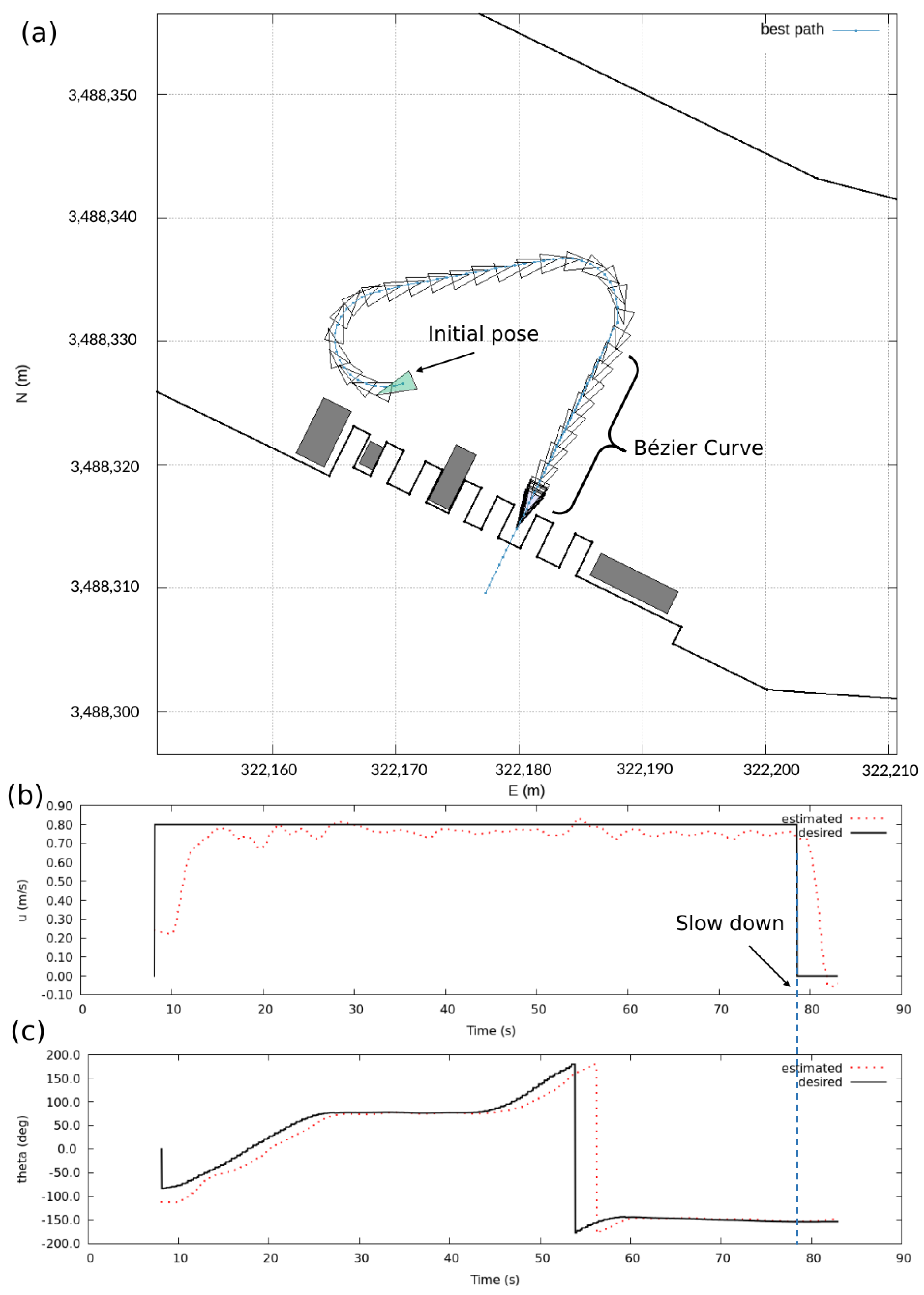
3.1.3. Case 03
3.2. Experimental Results
3.2.1. Case 04
3.2.2. Case 05
3.2.3. Case 06
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ohtsu, K.; Takai, T.; Yoshihisa, H. A Fully Automatic Berthing Test Using the Training Ship Shioji Maru. J. Navig. 1991, 44, 213–223. [Google Scholar] [CrossRef]
- Djouani, K.; Hamam, Y. Minimum time-energy trajectory planning for automatic ship berthing. IEEE J. Ocean. Eng. 1995, 20, 4–12. [Google Scholar] [CrossRef]
- Maki, A.; Sakamoto, N.; Akimoto, Y.; Nishikawa, H.; Umeda, N. Application of optimal control theory based on the evolution strategy (CMA-ES) to automatic berthing. J. Mar. Sci. Technol. 2020, 25, 221–233. [Google Scholar] [CrossRef]
- Mizuno, N.; Uchida, Y.; Okazaki, T. Quasi Real-Time Optimal Control Scheme for Automatic Berthing. IFAC-PapersOnLine 2015, 48, 305–312. [Google Scholar] [CrossRef]
- Ahmed, Y.A.; Hasegawa, K. Automatic Ship Berthing using Artificial Neural Network Based on Virtual Window Concept in Wind Condition. IFAC Proc. Vol. 2012, 45, 286–291. [Google Scholar] [CrossRef]
- Ahmed, Y.A.; Hasegawa, K. Automatic ship berthing using artificial neural network trained by consistent teaching data using nonlinear programming method. Eng. Appl. Artif. Intell. 2013, 26, 2287–2304. [Google Scholar] [CrossRef]
- Wang, S.; Sun, Z.; Yuan, Q.; Sun, Z.; Wu, Z.; Hsieh, T.H. Autonomous piloting and berthing based on Long Short Time Memory neural networks and nonlinear model predictive control algorithm. Ocean Eng. 2022, 264, 112269. [Google Scholar] [CrossRef]
- Shuai, Y.; Li, G.; Cheng, X.; Skulstad, R.; Xu, J.; Liu, H.; Zhang, H. An efficient neural-network based approach to automatic ship docking. Ocean Eng. 2019, 191, 106514. [Google Scholar] [CrossRef]
- Skulstad, R.; Li, G.; Fossen, T.I.; Vik, B.; Zhang, H. A Hybrid Approach to Motion Prediction for Ship Docking—Integration of a Neural Network Model Into the Ship Dynamic Model. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Martinsen, A.B.; Lekkas, A.M.; Gros, S. Autonomous docking using direct optimal control. IFAC-PapersOnLine 2019, 52, 97–102. [Google Scholar] [CrossRef]
- Miyauchi, Y.; Sawada, R.; Akimoto, Y.; Umeda, N.; Maki, A. Optimization on planning of trajectory and control of autonomous berthing and unberthing for the realistic port geometry. Ocean Eng. 2022, 245, 110390. [Google Scholar] [CrossRef]
- Martinsen, A.B.; Bitar, G.; Lekkas, A.M.; Gros, S. Optimization-Based Automatic Docking and Berthing of ASVs Using Exteroceptive Sensors: Theory and Experiments. IEEE Access 2020, 8, 204974–204986. [Google Scholar] [CrossRef]
- Shimizu, S.; Nishihara, K.; Miyauchi, Y.; Wakita, K.; Suyama, R.; Maki, A.; Shirakawa, S. Automatic berthing using supervised learning and reinforcement learning. Ocean Eng. 2022, 265, 112553. [Google Scholar] [CrossRef]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Dolgov, D.A. Practical Search Techniques in Path Planning for Autonomous Driving; American Association for Artificial Intelligence: Washington, DC, USA, 2008. [Google Scholar]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Path Planning for Autonomous Driving in Unknown Environments. In Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2009; pp. 55–64. [Google Scholar]
- Bitar, G.; Martinsen, A.B.; Lekkas, A.M.; Breivik, M. Two-Stage Optimized Trajectory Planning for ASVs Under Polygonal Obstacle Constraints: Theory and Experiments. IEEE Access 2020, 8, 199953–199969. [Google Scholar] [CrossRef]
- Reeds, J.; Shepp, L. Optimal paths for a car that goes both forwards and backwards. Pac. J. Math. 1990, 145, 367–393. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Wirtensohn, S.; Reuter, J.; Blaich, M.; Schuster, M.; Hamburger, O. Modelling and identification of a twin hull-based autonomous surface craft. In Proceedings of the 2013 18th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 26–29 August 2013; pp. 121–126. [Google Scholar] [CrossRef]
- Hu, Z.; Yang, Z.; Zhang, W. Path planning for auto docking of underactuated ships based on Bezier curve and hybrid A* search algorithm. Chin. J. Ship Res. 2024, 19, 220–229. [Google Scholar] [CrossRef]
- Fortune, S. A sweepline algorithm for Voronoi diagrams. In Proceedings of the Second Annual Symposium on Computational Geometry, Yorktown Heights, NY, USA, 2–4 June 1986; pp. 313–322. [Google Scholar]
- Masehian, E.; Amin-Naseri, M. A voronoi diagram-visibility graph-potential field compound algorithm for robot path planning. J. Robot. Syst. 2004, 21, 275–300. [Google Scholar] [CrossRef]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Sucan, I.A.; Moll, M.; Kavraki, L.E. The open motion planning library. IEEE Robot. Autom. Mag. 2012, 19, 72–82. [Google Scholar] [CrossRef]
- Marcucci, T.; Nobel, P.; Tedrake, R.; Boyd, S. Fast Path Planning Through Large Collections of Safe Boxes. arXiv 2024, arXiv:2305.01072. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Unit | Value |
|---|---|---|
| Length | 3.1 | |
| Width | 1.8 | |
| Weight | 244.0 | |
| CoG | 0.68 |
| Items | Unit | Value |
|---|---|---|
| 192.0 | ||
| −72.1 | ||
| −179.2 | ||
| −132.8 | ||
| −828.8 | ||
| −8.6 | ||
| −232.3 | ||
| −171.2 | ||
| −48.5 | ||
| −81.2 | ||
| −163.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Hu, Z.; Yang, Z.; Zhang, W. Graph Search-Based Path Planning for Automatic Ship Berthing. J. Mar. Sci. Eng. 2024, 12, 933. https://doi.org/10.3390/jmse12060933
Liu X, Hu Z, Yang Z, Zhang W. Graph Search-Based Path Planning for Automatic Ship Berthing. Journal of Marine Science and Engineering. 2024; 12(6):933. https://doi.org/10.3390/jmse12060933
Chicago/Turabian StyleLiu, Xiaocheng, Zhihuan Hu, Ziheng Yang, and Weidong Zhang. 2024. "Graph Search-Based Path Planning for Automatic Ship Berthing" Journal of Marine Science and Engineering 12, no. 6: 933. https://doi.org/10.3390/jmse12060933
APA StyleLiu, X., Hu, Z., Yang, Z., & Zhang, W. (2024). Graph Search-Based Path Planning for Automatic Ship Berthing. Journal of Marine Science and Engineering, 12(6), 933. https://doi.org/10.3390/jmse12060933