
Fully Coupled Hydrodynamic–Mooring–Motion Response Model for Semi-Submersible Tidal Stream Turbine Based on Actuation Line Method

Abstract
:1. Introduction
2. Methodology
2.1. Numerical Fluid Dynamics Methodology
2.2. Platform Motion Model
2.3. Mooring System
2.4. UALM
2.5. Turbulence Model
2.6. Fully Coupled Model
3. Test Design and Verification
3.1. Experimental Data
3.2. Numerical Simulation Setup
3.3. Model Approximations
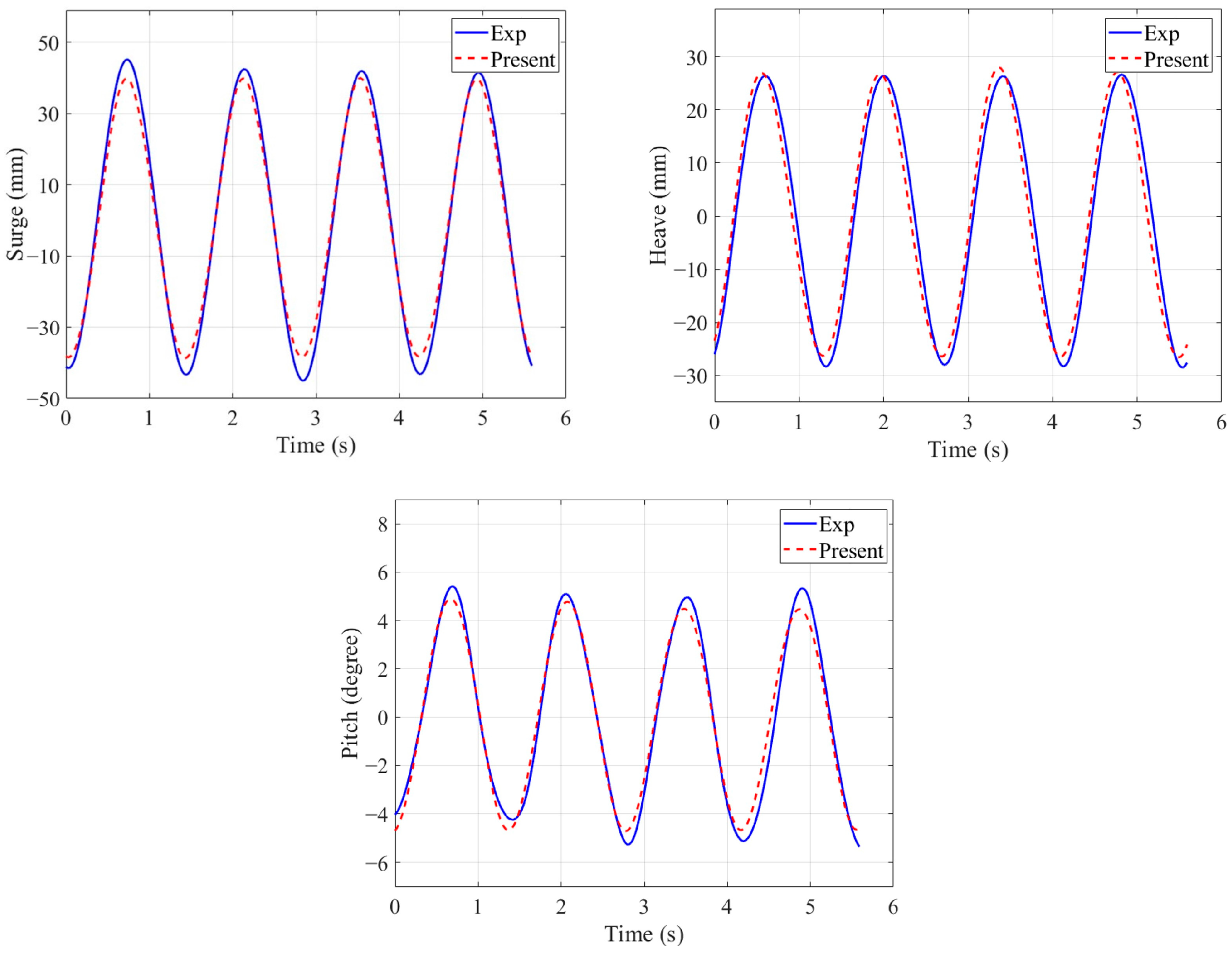
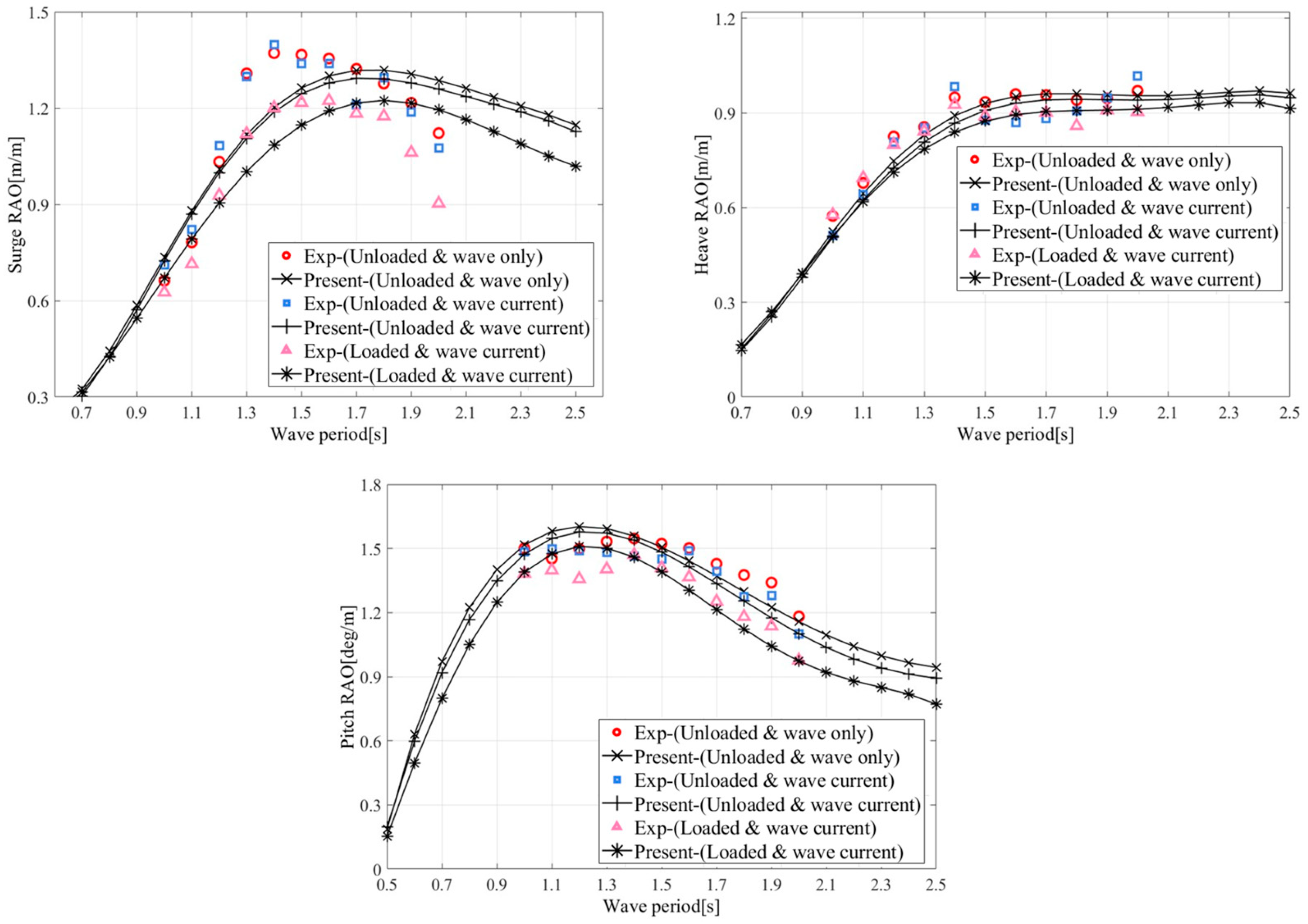
3.4. Verification of Platform Motion Response Results
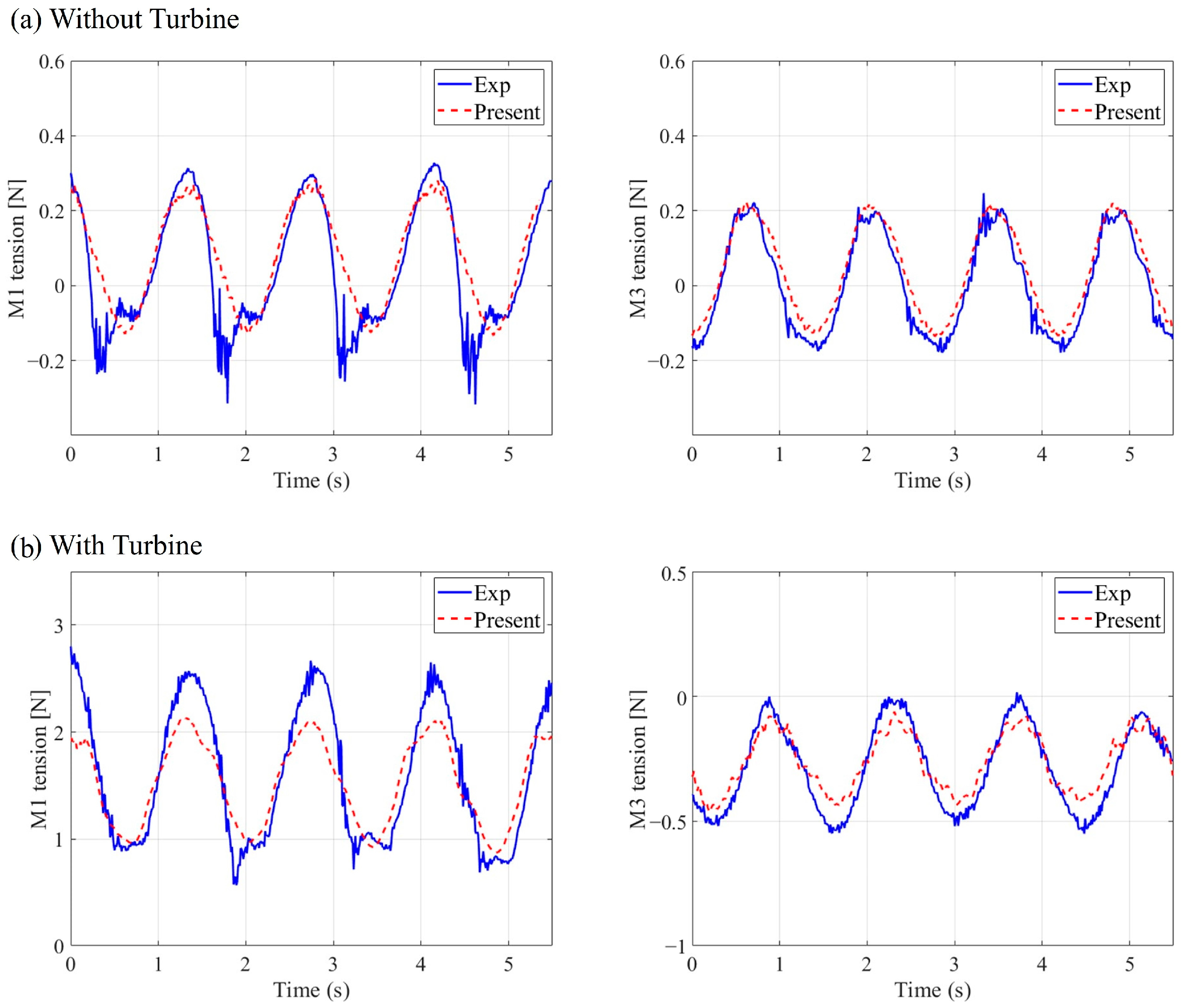
3.5. Verification of Mooring Lines Tension Results
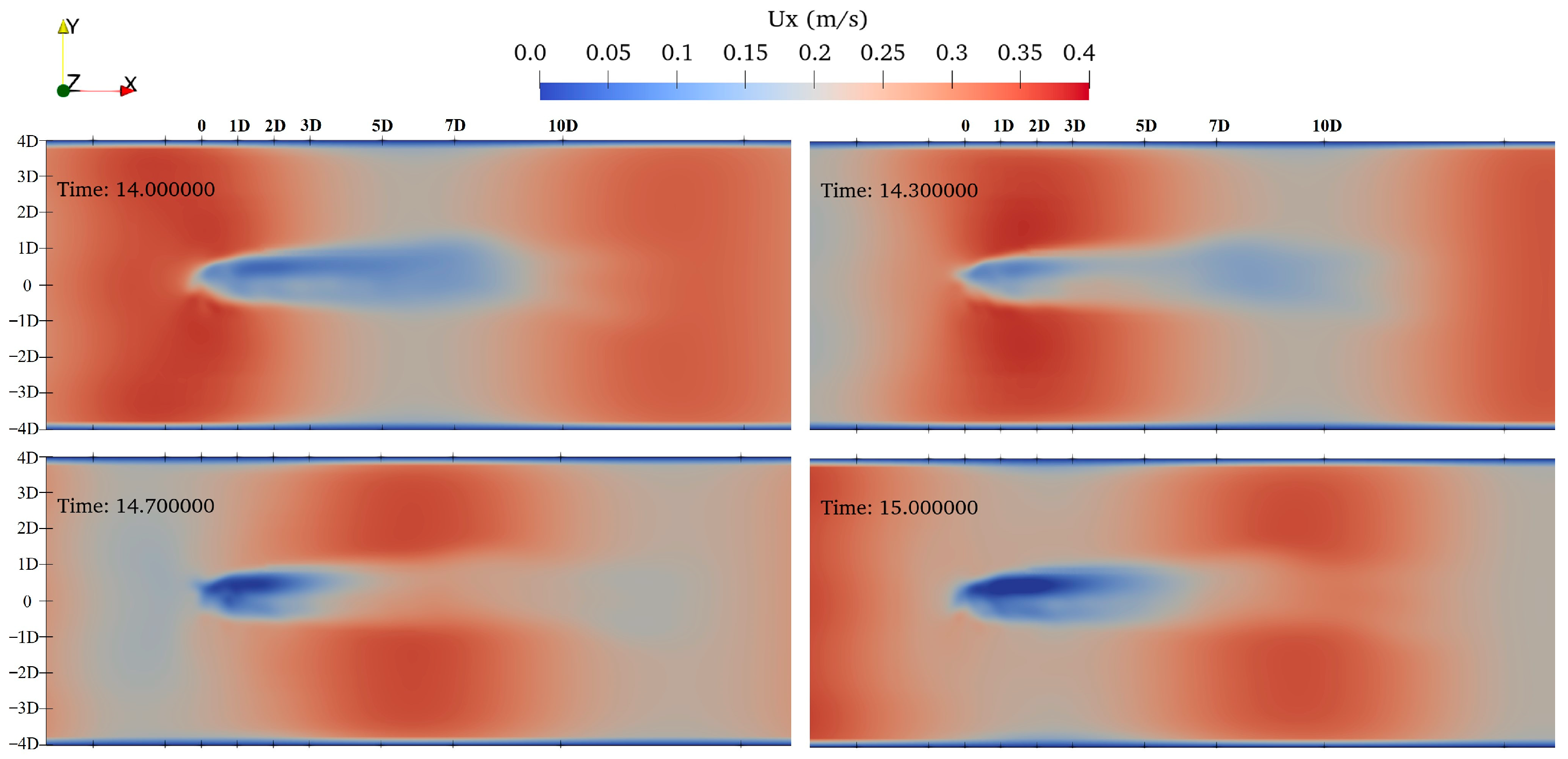
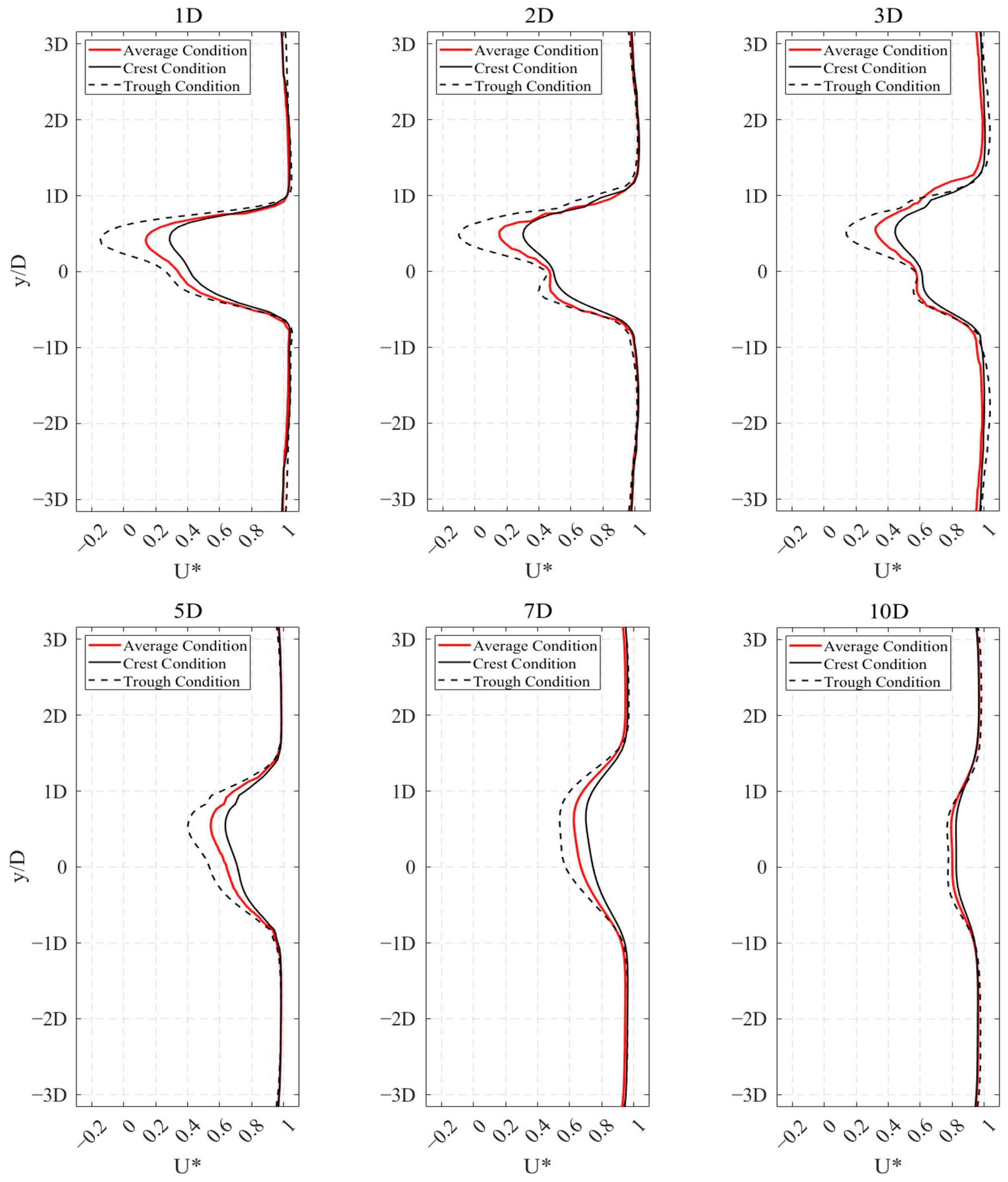
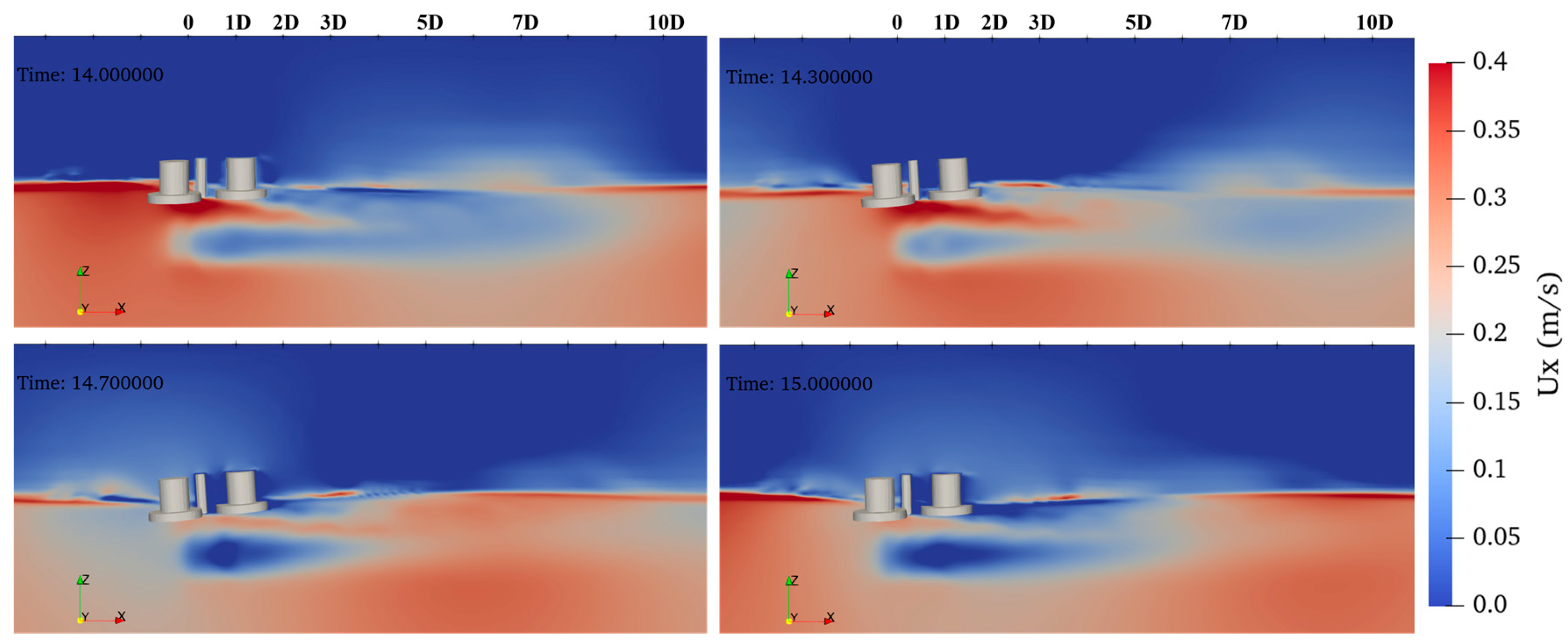
4. Wake Field Characteristics of FTSET
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, X.; Chen, Z.; Si, Y.; Qian, P.; Wu, H.; Cui, L.; Zhang, D. A Review of Tidal Current Energy Resource Assessment in China. Renew. Sustain. Energy Rev. 2021, 145, 111012. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, C.; Jiang, B. Development and the Environmental Impact Analysis of Tidal Current Energy Turbines in China. IOP Conf. Ser. Earth Environ. Sci. 2018, 121, 042003. [Google Scholar] [CrossRef]
- Zhang, J.; Zhou, Y.; Lin, X.; Wang, G.; Guo, Y.; Chen, H. Experimental Investigation on Wake and Thrust Characteristics of a Twin-Rotor Horizontal Axis Tidal Stream Turbine. Renew. Energy 2022, 195, 701–715. [Google Scholar] [CrossRef]
- Farkas, A.; Degiuli, N.; Martić, I.; Barbarić, M.; Guzović, Z. The Impact of Biofilm on Marine Current Turbine Performance. Renew. Energy 2022, 190, 584–595. [Google Scholar] [CrossRef]
- Lamy, J.V.; Azevedo, I.L. Do Tidal Stream Energy Projects Offer More Value than Offshore Wind Farms? A Case Study in the United Kingdom. Energy Policy 2018, 113, 28–40. [Google Scholar] [CrossRef]
- Zhou, Z.; Benbouzid, M.; Charpentier, J.-F.; Scuiller, F.; Tang, T. Developments in Large Marine Current Turbine Technologies—A Review. Renew. Sustain. Energy Rev. 2017, 71, 852–858. [Google Scholar] [CrossRef]
- Peng, B.; Zhang, Y.; Zheng, Y.; Wang, R.; Fernandez-Rodriguez, E.; Tang, Q.; Zhang, Z.; Zang, W. The Effects of Surge Motion on the Dynamics and Wake Characteristics of a Floating Tidal Stream Turbine under Free Surface Condition. Energy Convers. Manag. 2022, 266, 115816. [Google Scholar] [CrossRef]
- Chen, S.; Jiang, B.; Li, X.; Huang, J.; Wu, X.; Xiong, Q.; Parker, R.G.; Zuo, L. Design, Dynamic Modeling and Wave Basin Verification of a Hybrid Wave–Current Energy Converter. Appl. Energy 2022, 321, 119320. [Google Scholar] [CrossRef]
- Hao, H.; Guo, Z.; Ma, Q.; Xu, G. Air Cushion Barge Platform for Offshore Wind Turbine and Its Stability at a Large Range of Angle. Ocean Eng. 2020, 217, 107886. [Google Scholar] [CrossRef]
- Shi, J.; Feng, X.; Toumi, R.; Zhang, C.; Hodges, K.I.; Tao, A.; Zhang, W.; Zheng, J. Global Increase in Tropical Cyclone Ocean Surface Waves. Nat. Commun. 2024, 15, 174. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Wang, S.; Sheng, Q.; Jing, F.; Ma, Y. The Effects of Surge Motion of the Floating Platform on Hydrodynamics Performance of Horizontal-Axis Tidal Current Turbine. Renew. Energy 2015, 74, 796–802. [Google Scholar] [CrossRef]
- Wang, G.; Zhang, J.; Lu, B.; Lin, X.; Wang, F.; Liu, S. Experimental Investigation of Motion Response and Mooring Load of Semi-Submersible Tidal Stream Energy Turbine under Wave-Current Interactions. Ocean Eng. 2024, 300, 117445. [Google Scholar] [CrossRef]
- Zhang, Y.; Wei, W.; Zheng, J.; Peng, B.; Qian, Y.; Li, C.; Zheng, Y.; Fernandez-Rodriguez, E.; Yu, A. Quantifying the Surge-Induced Response of a Floating Tidal Stream Turbine under Wave-Current Flows. Energy 2023, 283, 129072. [Google Scholar] [CrossRef]
- Brown, S.A.; Ransley, E.J.; Greaves, D.M. Developing a Coupled Turbine Thrust Methodology for Floating Tidal Stream Concepts: Verification under Prescribed Motion. Renew. Energy 2020, 147, 529–540. [Google Scholar] [CrossRef]
- Ma, Y.; Hu, C.; Li, L. Hydrodynamics and Wake Flow Analysis of a Π-Type Vertical Axis Twin-Rotor Tidal Current Turbine in Surge Motion. Ocean Eng. 2021, 224, 108625. [Google Scholar] [CrossRef]
- Huang, B.; Zhao, B.; Wang, L.; Wang, P.; Zhao, H.; Guo, P.; Yang, S.; Wu, D. The Effects of Heave Motion on the Performance of a Floating Counter-Rotating Type Tidal Turbine under Wave-Current Interaction. Energy Convers. Manag. 2022, 252, 115093. [Google Scholar] [CrossRef]
- Wang, S.; Li, C.; Zhang, Y.; Jing, F.; Chen, L. Influence of Pitching Motion on the Hydrodynamic Performance of a Horizontal Axis Tidal Turbine Considering the Surface Wave. Renew. Energy 2022, 189, 1020–1032. [Google Scholar] [CrossRef]
- Chen, S.; Wang, S.; Huang, R.; Shi, W.; Jing, F. Fast Prediction of Hydrodynamic Load of Floating Horizontal Axis Tidal Turbine with Variable Speed Control under Surging Motion with Free Surface. Appl. Ocean. Res. 2023, 135, 103566. [Google Scholar] [CrossRef]
- Wang, S.; Chen, S.; Li, C.; Guo, W.; Jing, F.; Wang, K. Study on Fast Prediction Method of Hydrodynamic Load of Floating Horizontal Axis Tidal Current Turbine with Pitching Motion under Free Surface. Ocean Eng. 2023, 279, 114589. [Google Scholar] [CrossRef]
- Zhang, Y.; Peng, B.; Zheng, J.; Zheng, Y.; Tang, Q.; Liu, Z.; Xu, J.; Wang, Y.; Fernandez-Rodriguez, E. The Impact of Yaw Motion on the Wake Interaction of Adjacent Floating Tidal Stream Turbines under Free Surface Condition. Energy 2023, 283, 129071. [Google Scholar] [CrossRef]
- Brown, S.A.; Ransley, E.J.; Zheng, S.; Xie, N.; Howey, B.; Greaves, D.M. Development of a Fully Nonlinear, Coupled Numerical Model for Assessment of Floating Tidal Stream Concepts. Ocean Eng. 2020, 218, 108253. [Google Scholar] [CrossRef]
- Brown, S.A.; Ransley, E.J.; Xie, N.; Monk, K.; De Angelis, G.M.; Nicholls-Lee, R.; Guerrini, E.; Greaves, D.M. On the Impact of Motion-Thrust Coupling in Floating Tidal Energy Applications. Appl. Energy 2021, 282, 116246. [Google Scholar] [CrossRef]
- Bachant, P.; Goude, A.; Wosnik, M. Actuator Line Modeling of Vertical-Axis Turbines. arXiv 2018, arXiv:1605.01449. [Google Scholar]
- Fleming, P.; Gebraad, P.M.O.; Lee, S.; van Wingerden, J.-W.; Johnson, K.; Churchfield, M.; Michalakes, J.; Spalart, P.; Moriarty, P. Simulation Comparison of Wake Mitigation Control Strategies for a Two-turbine Case. Wind Energ. 2015, 18, 2135–2143. [Google Scholar] [CrossRef]
- Stanly, R.; Martínez-Tossas, L.A.; Frankel, S.H.; Delorme, Y. Large-Eddy Simulation of a Wind Turbine Using a Filtered Actuator Line Model. J. Wind. Eng. Ind. Aerodyn. 2022, 222, 104868. [Google Scholar] [CrossRef]
- Deng, X.; Zhang, J.; Lin, X. Proposal of Actuator Line-Immersed Boundary Coupling Model for Tidal Stream Turbine Modeling with Hydrodynamics upon Scouring Morphology. Energy 2024, 292, 130451. [Google Scholar] [CrossRef]
- Cheng, P.; Huang, Y.; Wan, D. A Numerical Model for Fully Coupled Aero-Hydrodynamic Analysis of Floating Offshore Wind Turbine. Ocean Eng. 2019, 173, 183–196. [Google Scholar] [CrossRef]
- Yu, Z.; Ma, Q.; Zheng, X.; Liao, K.; Sun, H.; Khayyer, A. A Hybrid Numerical Model for Simulating Aero-Elastic-Hydro-Mooring-Wake Dynamic Responses of Floating Offshore Wind Turbine. Ocean Eng. 2023, 268, 113050. [Google Scholar] [CrossRef]
- Hall, M.; Goupee, A. Validation of a Lumped-Mass Mooring Line Model with DeepCwind Semisubmersible Model Test Data. Ocean Eng. 2015, 104, 590–603. [Google Scholar] [CrossRef]
- Higuera, P.; Losada, I.J.; Lara, J.L. Three-Dimensional Numerical Wave Generation with Moving Boundaries. Coast. Eng. 2015, 101, 35–47. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Volume of Fluid (VOF) Method for the Dynamics of Free Boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Gatin, I.; Vukčević, V.; Jasak, H.; Rusche, H. Enhanced Coupling of Solid Body Motion and Fluid Flow in Finite Volume Framework. Ocean Eng. 2017, 143, 295–304. [Google Scholar] [CrossRef]
- Mentes, A.; Yetkin, M. An Application of Soft Computing Techniques to Predict Dynamic Behaviour of Mooring Systems. Brodogradnja 2022, 73, 121–137. [Google Scholar] [CrossRef]
- Wang, B.; Jiao, Y.; Qiao, D.; Gao, S.; Li, T.; Ou, J. Motion Characteristics of Vertically Loaded Anchor during Drag Embedment in Layered Clay. Brodogradnja 2023, 74, 109–125. [Google Scholar] [CrossRef]
- Palm, J.; Eskilsson, C.; Paredes, G.M.; Bergdahl, L. Coupled Mooring Analysis for Floating Wave Energy Converters Using CFD: Formulation and Validation. Int. J. Mar. Energy 2016, 16, 83–99. [Google Scholar] [CrossRef]
- Lee, S.C.; Song, S.; Park, S. Platform Motions and Mooring System Coupled Solver for a Moored Floating Platform in a Wave. Processes 2021, 9, 1393. [Google Scholar] [CrossRef]
- Chen, H.; Hall, M. CFD Simulation of Floating Body Motion with Mooring Dynamics: Coupling MoorDyn with OpenFOAM. Appl. Ocean. Res. 2022, 124, 103210. [Google Scholar] [CrossRef]
- Johlas, H.M.; Martínez-Tossas, L.A.; Lackner, M.A.; Schmidt, D.P.; Churchfield, M.J. Large Eddy Simulations of Offshore Wind Turbine Wakes for Two Floating Platform Types. J. Phys. Conf. Ser. 2020, 1452, 012034. [Google Scholar] [CrossRef]
- Devolder, B.; Rauwoens, P.; Troch, P. Application of a Buoyancy-Modified k-ω SST Turbulence Model to Simulate Wave Run-up around a Monopile Subjected to Regular Waves Using OpenFOAM®. Coast. Eng. 2017, 125, 81–94. [Google Scholar] [CrossRef]
- Devolder, B.; Troch, P.; Rauwoens, P. Performance of a Buoyancy-Modified k-ω and k-ω SST Turbulence Model for Simulating Wave Breaking under Regular Waves Using OpenFOAM®. Coast. Eng. 2018, 138, 49–65. [Google Scholar] [CrossRef]
- Dai, P.; Huang, Z.; Zhang, J. A Modelling Study of the Tidal Stream Resource around Zhoushan Archipelago, China. Renew. Energy 2023, 218, 119234. [Google Scholar] [CrossRef]
- Pericàs, P.F. CFD Simulation of a Floating Wind Turbine with OpenFOAM: An FSI Approach Based on the Actuator Line and Relaxation Zone Methods. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2022. [Google Scholar]
- Domínguez, J.M.; Crespo, A.J.C.; Hall, M.; Altomare, C.; Wu, M.; Stratigaki, V.; Troch, P.; Cappietti, L.; Gómez-Gesteira, M. SPH Simulation of Floating Structures with Moorings. Coast. Eng. 2019, 153, 103560. [Google Scholar] [CrossRef]
- Jeon, W.; Park, S.; Cho, S. Moored Motion Prediction of a Semi-Submersible Offshore Platform in Waves Using an OpenFOAM and MoorDyn Coupled Solver. Int. J. Nav. Archit. Ocean. Eng. 2023, 15, 100544. [Google Scholar] [CrossRef]
- Wan, D.; Zhao, W. Numerical Study of Interactions Between Phase II of OC4 Wind Turbine and Its Semi-Submersible Floating Support System. J. Ocean. Wind. Energy 2015, 2, 45–53. [Google Scholar]
- Dunbar, A.J. Development and Validation of a Tightly Coupled CFD/6-DOF Solver for Simulating Floating Offshore Wind Turbine Platforms. Ocean Eng. 2015, 110, 98–105. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Value |
|---|---|
| Diameter of Pontoon | 15 cm |
| Height of Pontoon | 17 cm |
| Center Distance of Pontoon | 40 cm |
| Diameter of Heave Plate | 30 cm |
| Draft Depth | 7 cm |
| Blade Airfoil | NACA-0018 |
| Number of Blades | 3 |
| Chord Length of Blades | 6 cm |
| Blade Length | 25 cm |
| Turbine Diameter (D) | 25 cm |
| Optimal Tip Speed Ratio (TSR) | 2 |
| Mass of Turbine | 1.62 kg |
| Total Mass | 5.13 kg |
| Center of Gravity (x, y, z) | (0, 0, −3.5) cm |
| Moment of Inertia (Ixx, Iyy, Izz) | (0.1937, 0.1937, 0.3177) kg·m2 |
| TypeName | Diam (m) | Mass (kg/m) | BA/-zeta | Cd | Ca | CdAx | CaAx |
|---|---|---|---|---|---|---|---|
| Chainup | 0.00252 | 0.122 | −0.8 | 1.6 | 1.0 | 0.05 | 0.0 |
| alpha.water | prgh | U | k | |
| Inlet | waveAlphaOla | fixedFluxPressure | waveVelocityOla (0.29 m/s) | fixedValue |
| Outlet | zeroGradient | fixedFluxPressure | waveAbsorptionVelocity | fixedValue |
| Walls | zeroGradient | fixedFluxPressure | fixedValue | fixedValue |
| Floater | zeroGradient | fixedFluxPressure | movingWallVelocity | inletOutlet |
| Atmosphere | zeroGradient | totalPressure | pressureInletOutletVelocity | kqRWallFunction |
| Mesh Scheme | Total Number | Cp | Cp/Cp-ref |
|---|---|---|---|
| 1 | 1.01 m | / | / |
| 2 | 1.82 m | 0.2031 | 0.83 |
| 3 | 2.64 m | 0.2385 | 0.98 |
| 4 | 3.46 m | 0.2437 | 1 |
| 5 | 4.28 m | 0.2446 | 1.003 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Zhang, J.; Lin, X.; Chen, H.; Wang, F.; Liu, S. Fully Coupled Hydrodynamic–Mooring–Motion Response Model for Semi-Submersible Tidal Stream Turbine Based on Actuation Line Method. J. Mar. Sci. Eng. 2024, 12, 1046. https://doi.org/10.3390/jmse12071046
Wang G, Zhang J, Lin X, Chen H, Wang F, Liu S. Fully Coupled Hydrodynamic–Mooring–Motion Response Model for Semi-Submersible Tidal Stream Turbine Based on Actuation Line Method. Journal of Marine Science and Engineering. 2024; 12(7):1046. https://doi.org/10.3390/jmse12071046
Chicago/Turabian StyleWang, Guohui, Jisheng Zhang, Xiangfeng Lin, Hao Chen, Fangyu Wang, and Siyuan Liu. 2024. "Fully Coupled Hydrodynamic–Mooring–Motion Response Model for Semi-Submersible Tidal Stream Turbine Based on Actuation Line Method" Journal of Marine Science and Engineering 12, no. 7: 1046. https://doi.org/10.3390/jmse12071046