
Hybrid Torque Coefficient Control of Average-to-Peak Ratio for Turbine Angular Velocity Reduction in Oscillating-Water-Column-Type Wave Energy Converter



Abstract
1. Introduction
2. Materials and Methods
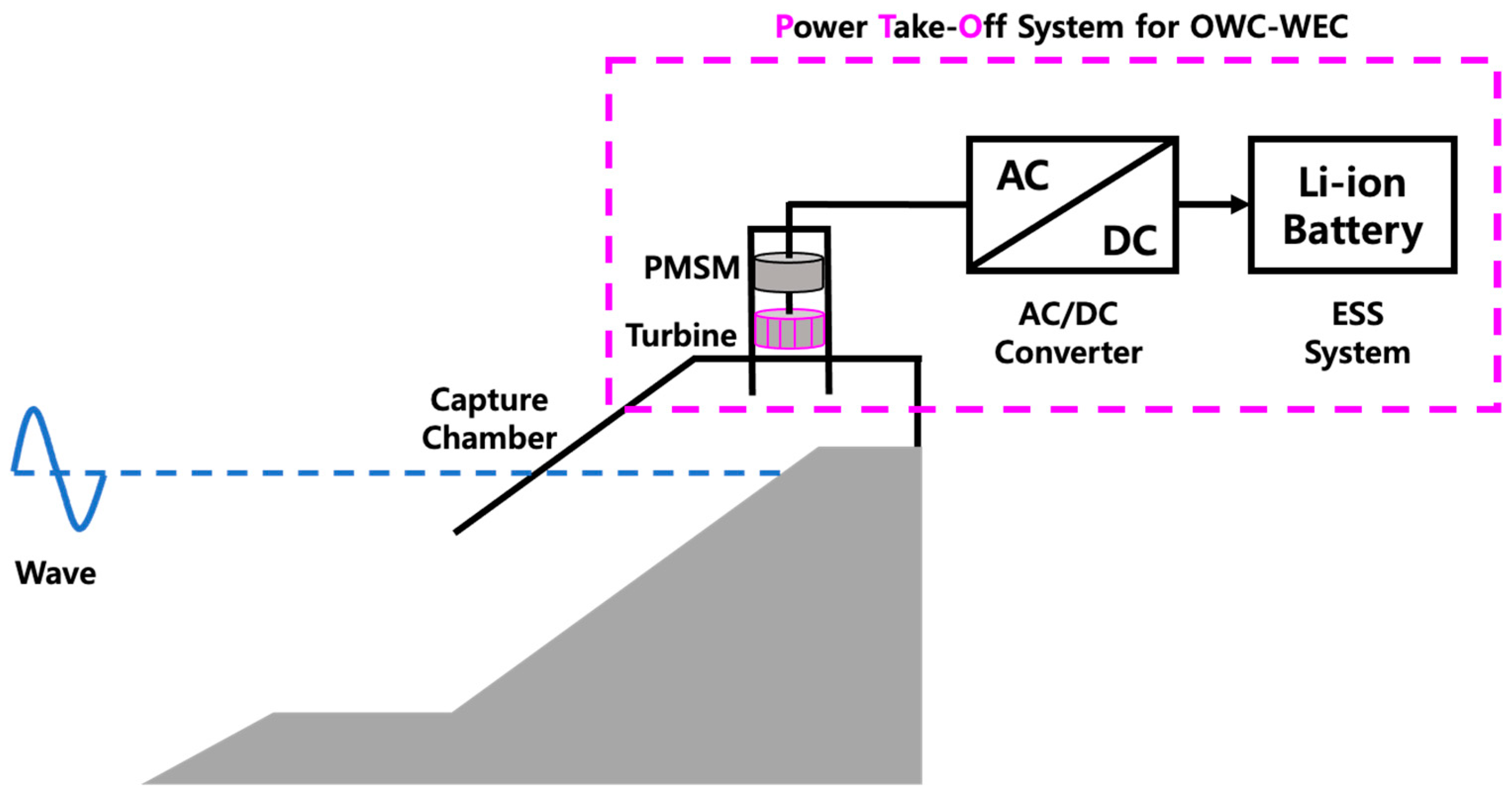
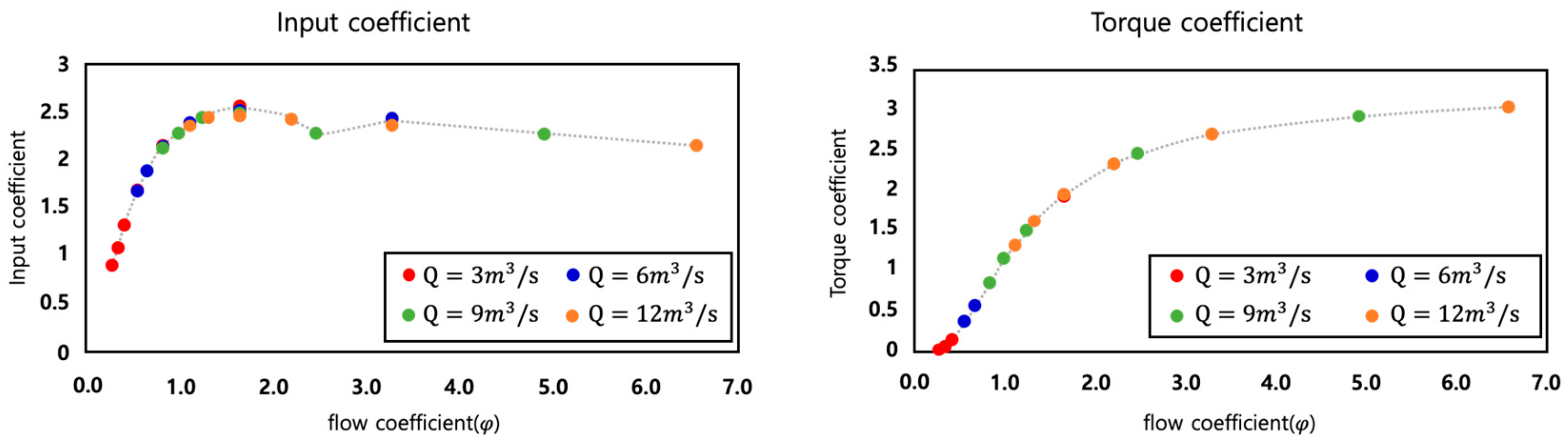
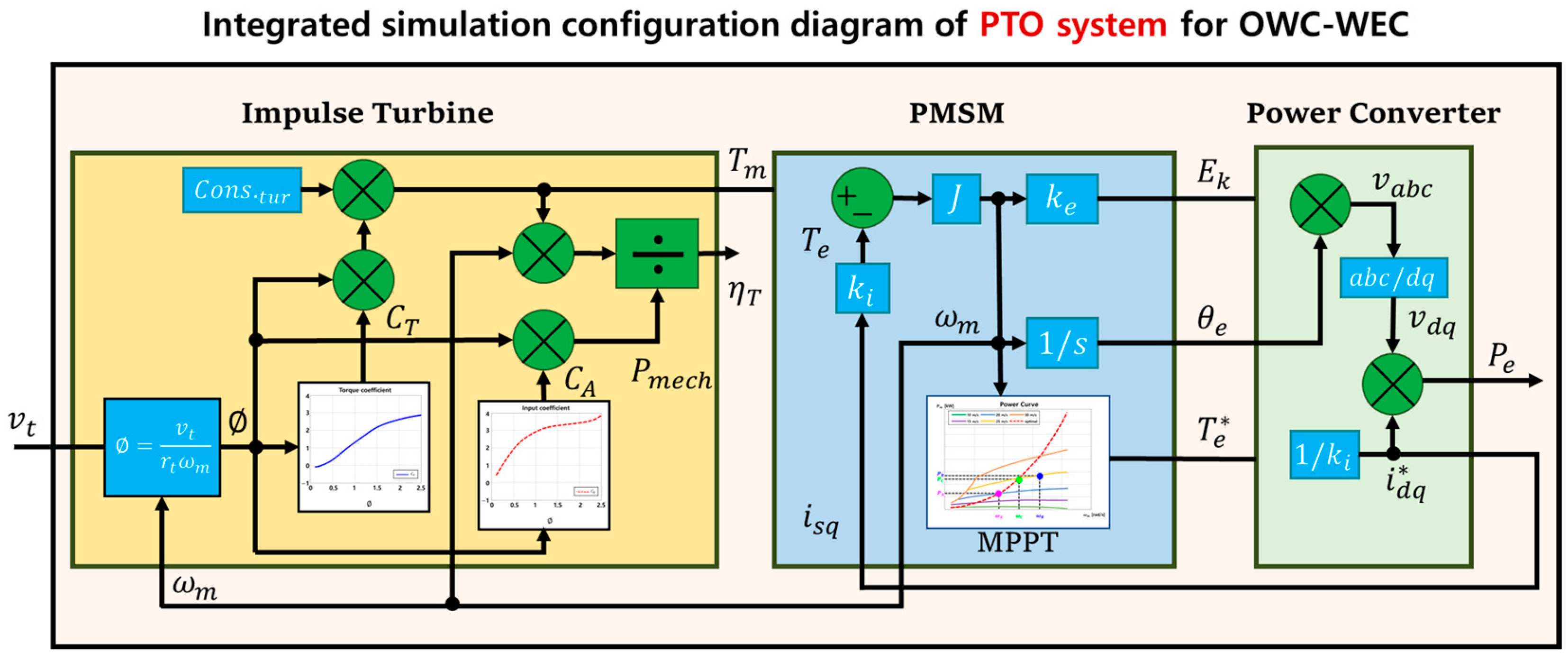
2.1. Turbine and Generator System Modeling
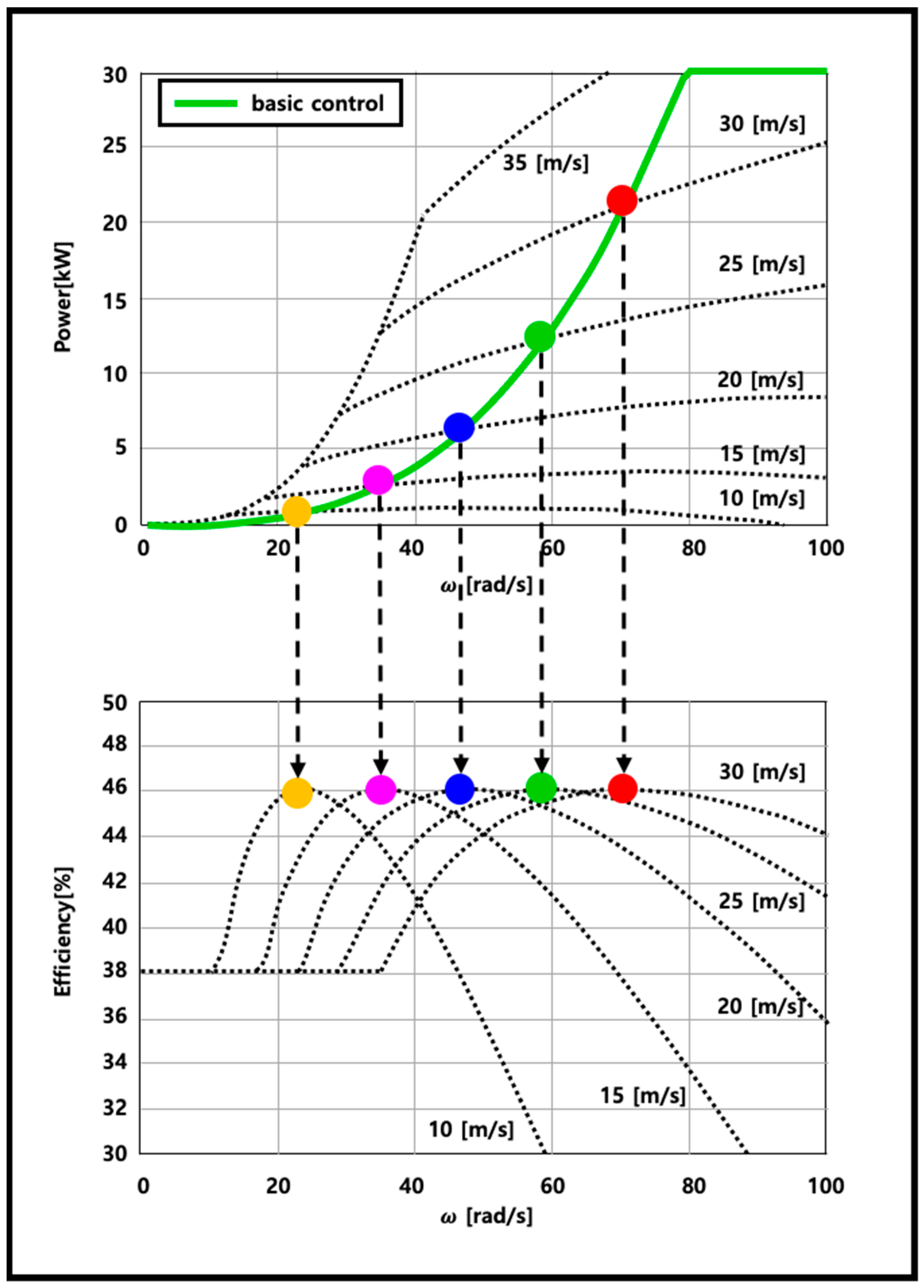
2.2. Conventional Control Method for OWC PTO System
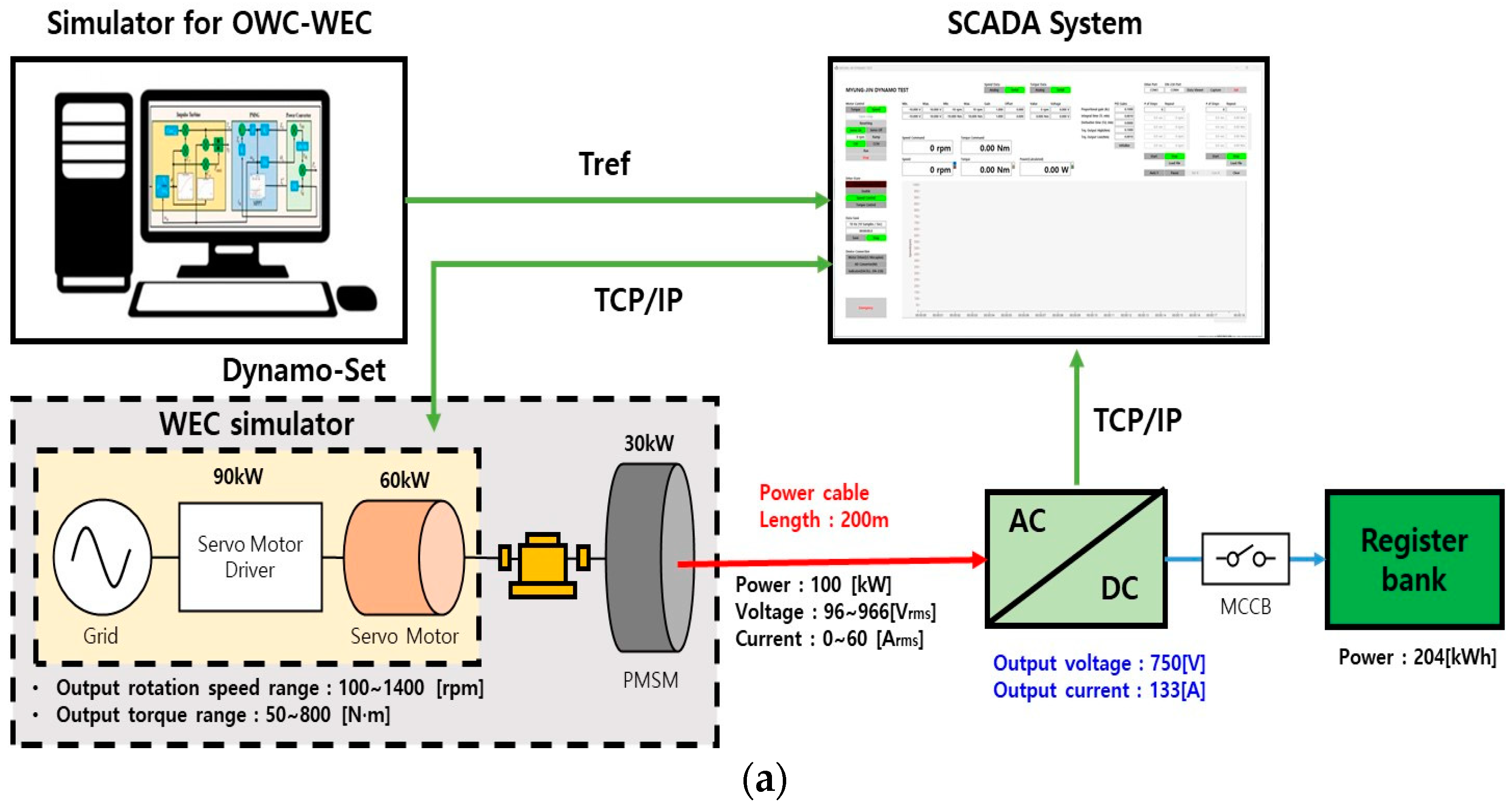
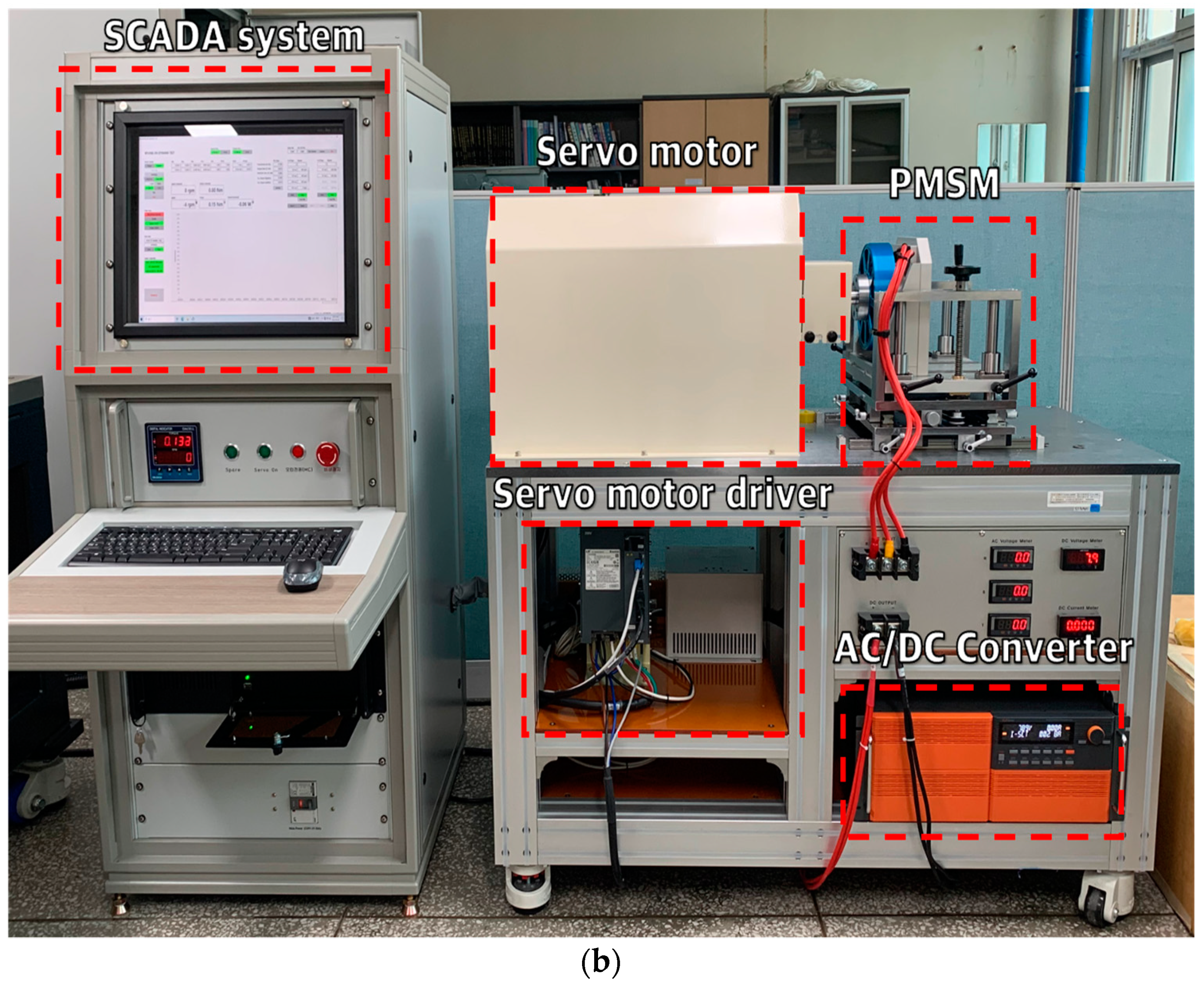
2.3. Configuration for Algorithm Verification
3. Comparison of Algorithm Characteristics with Respect to Change in Torque Coefficient in OWC
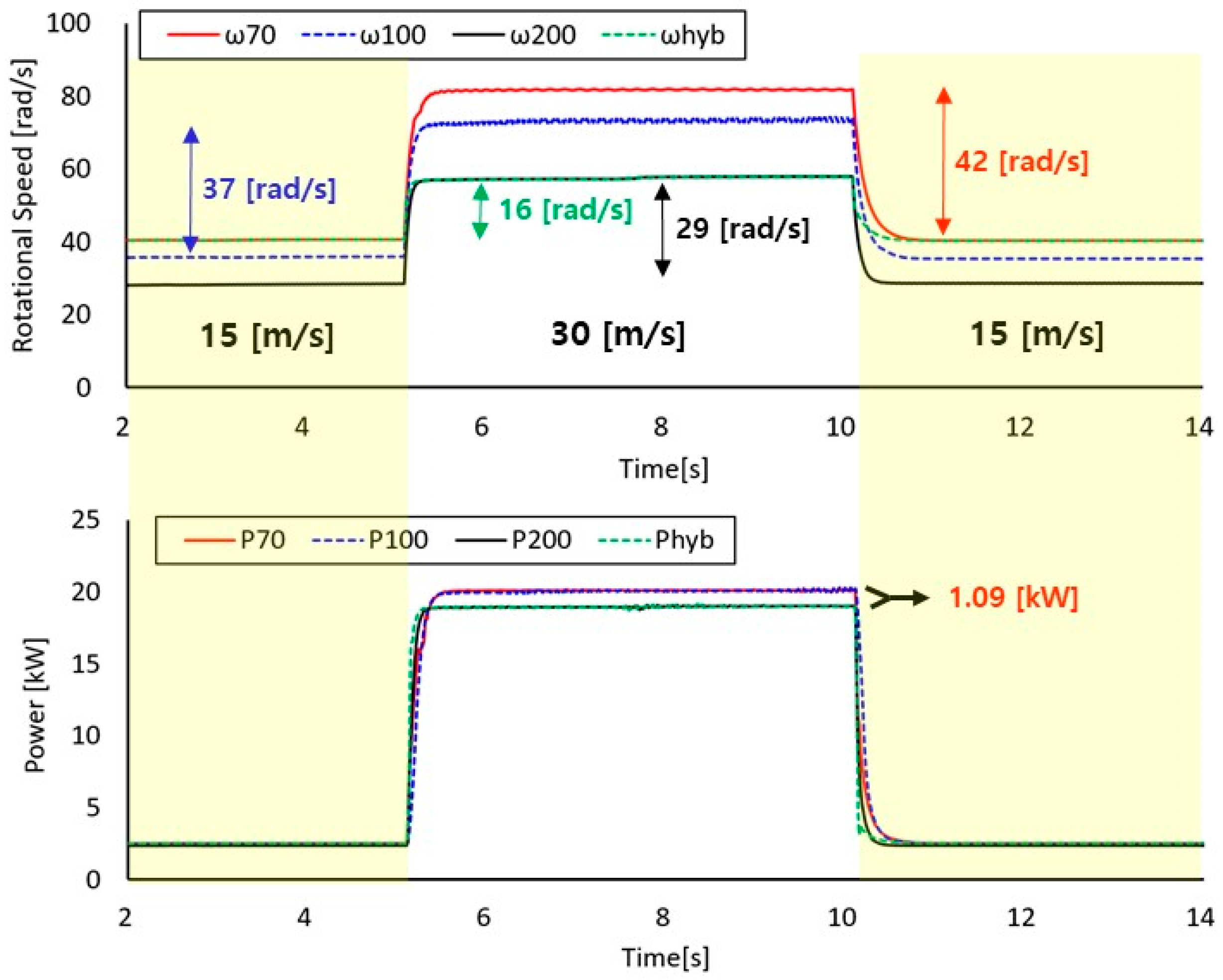
3.1. Algorithm Performance in Increase/Decrease in Torque Coefficient (70/200%)
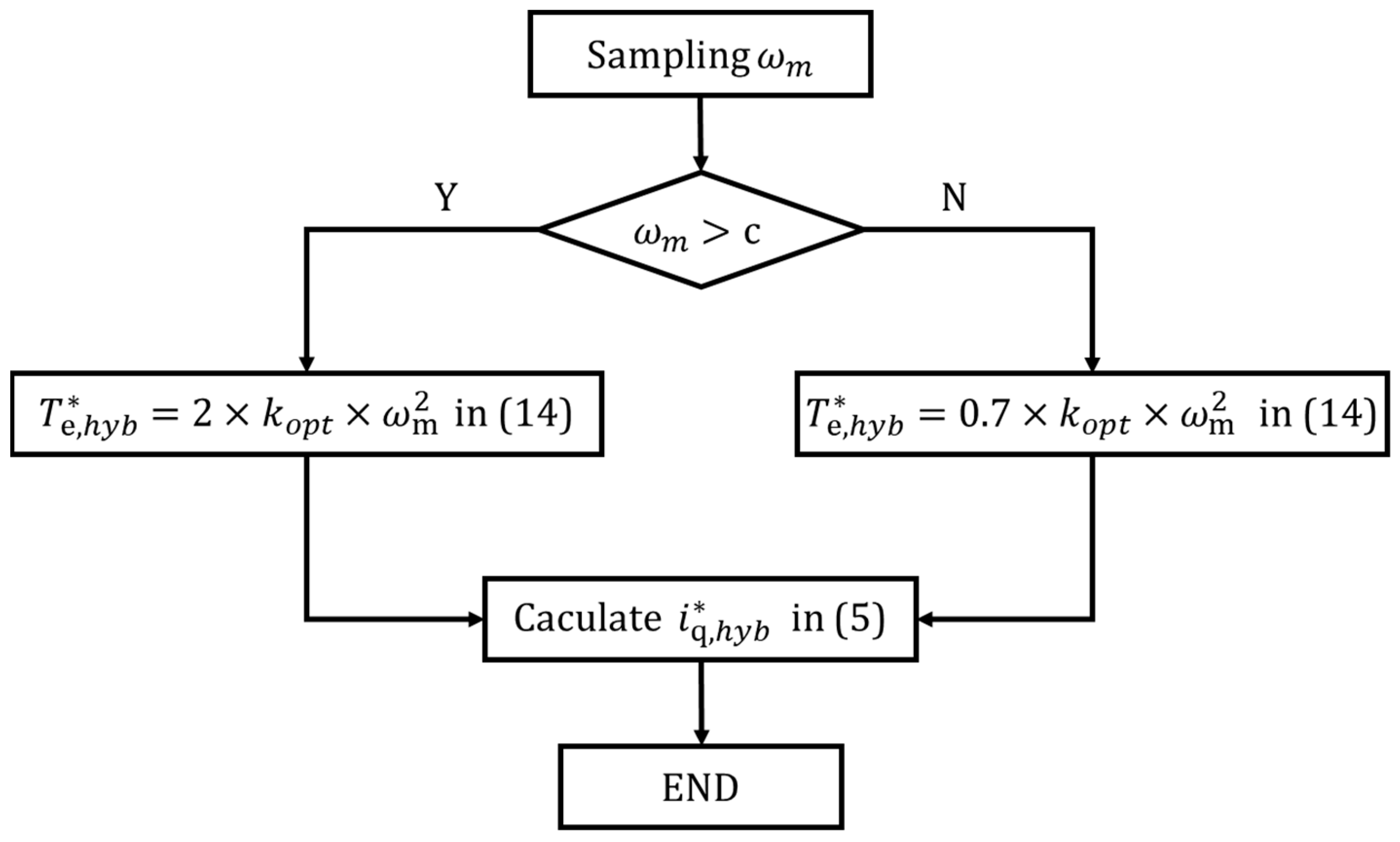
3.2. Hybrid Control Method to Reduce Turbine Angular Velocity Variation
4. Results
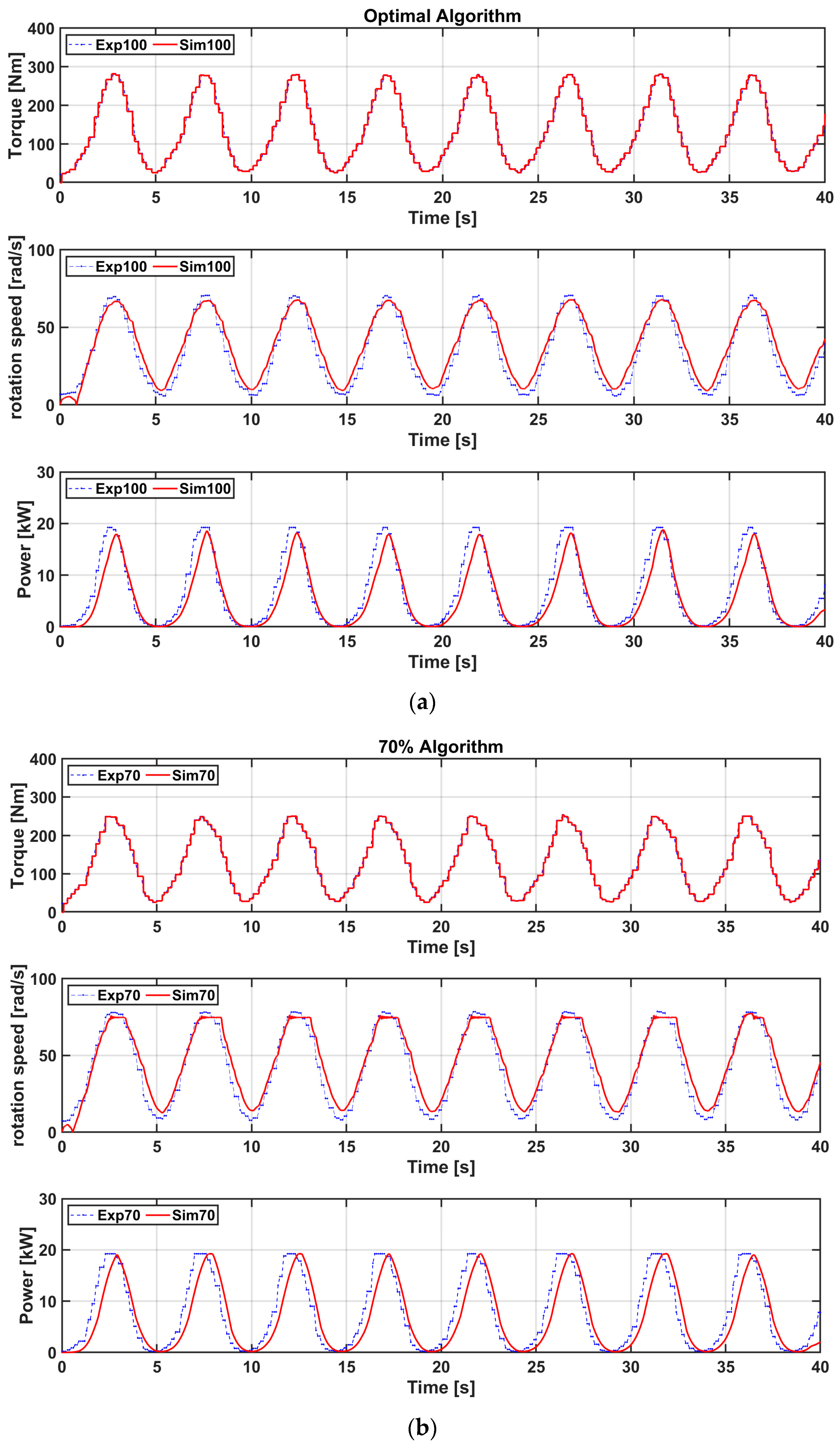
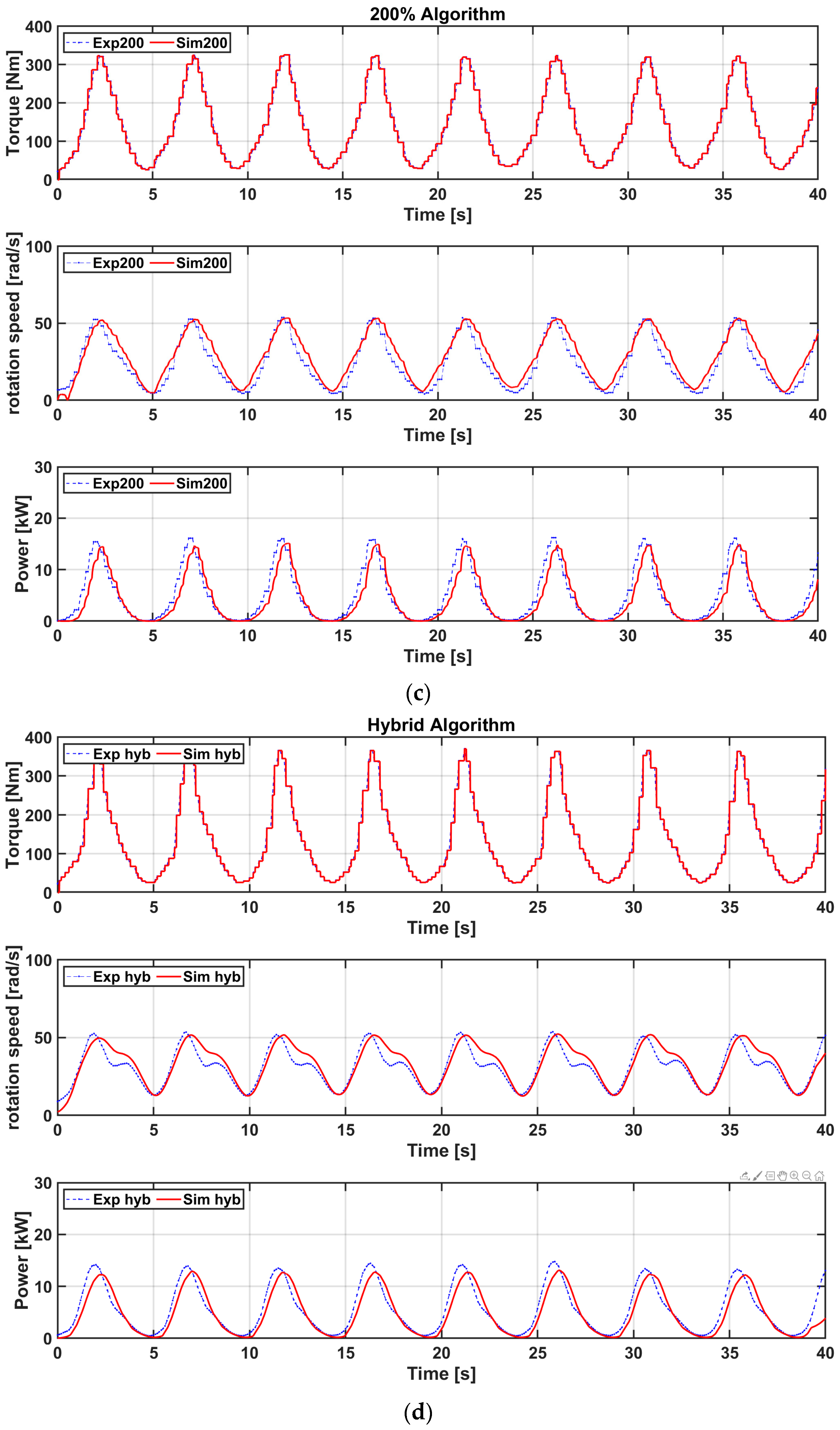
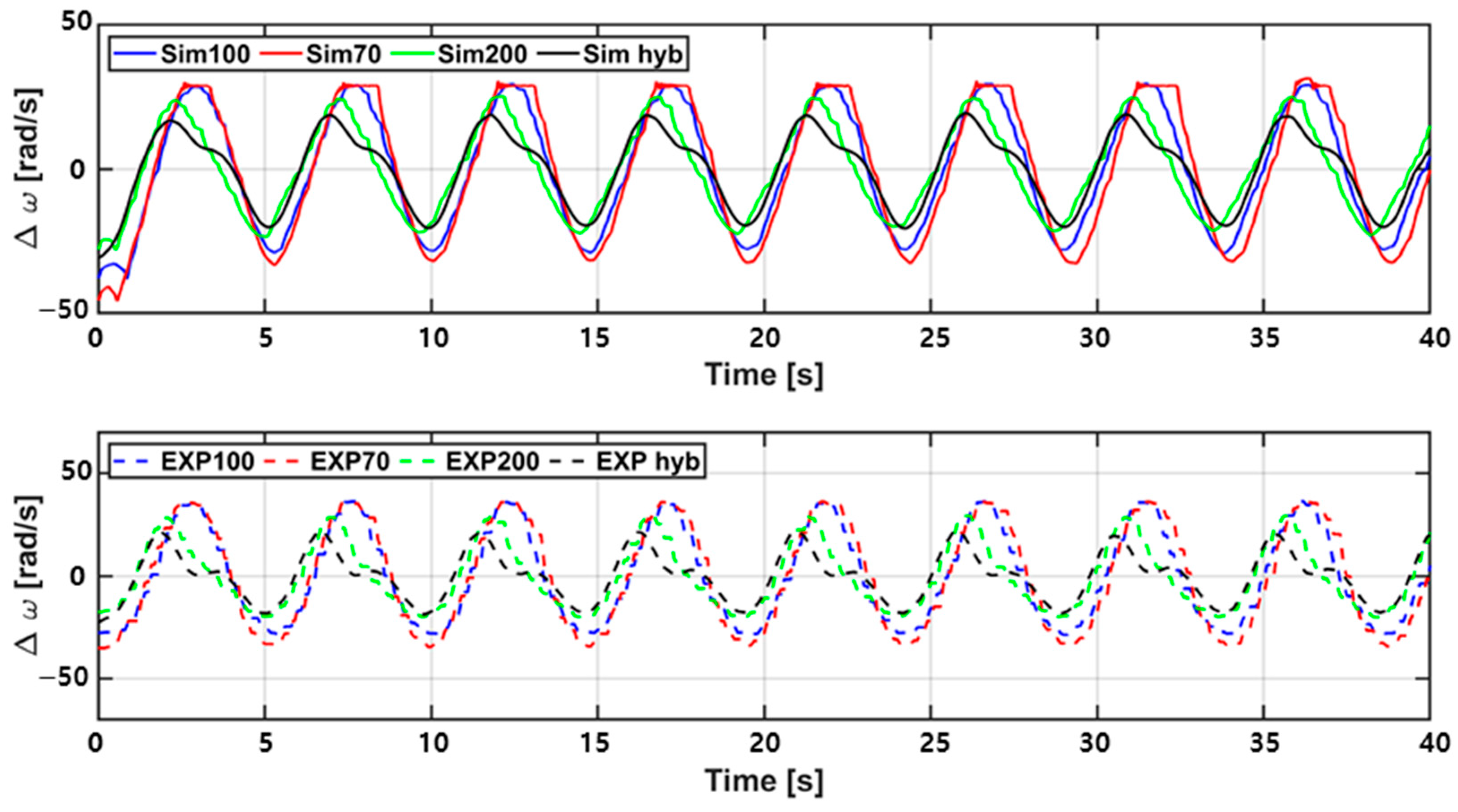
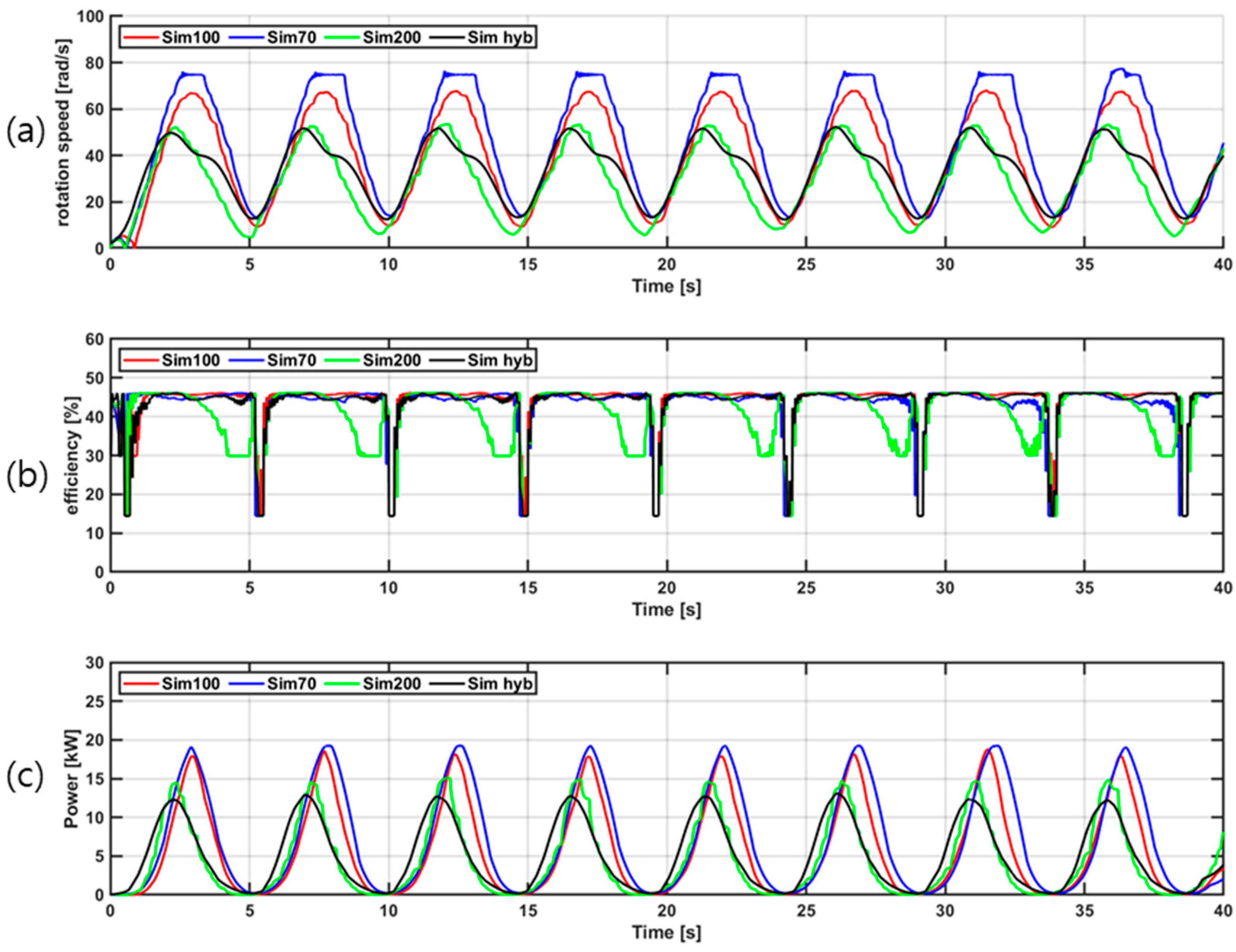
4.1. Analysis of Algorithm Characteristics under Regular Wave Conditions
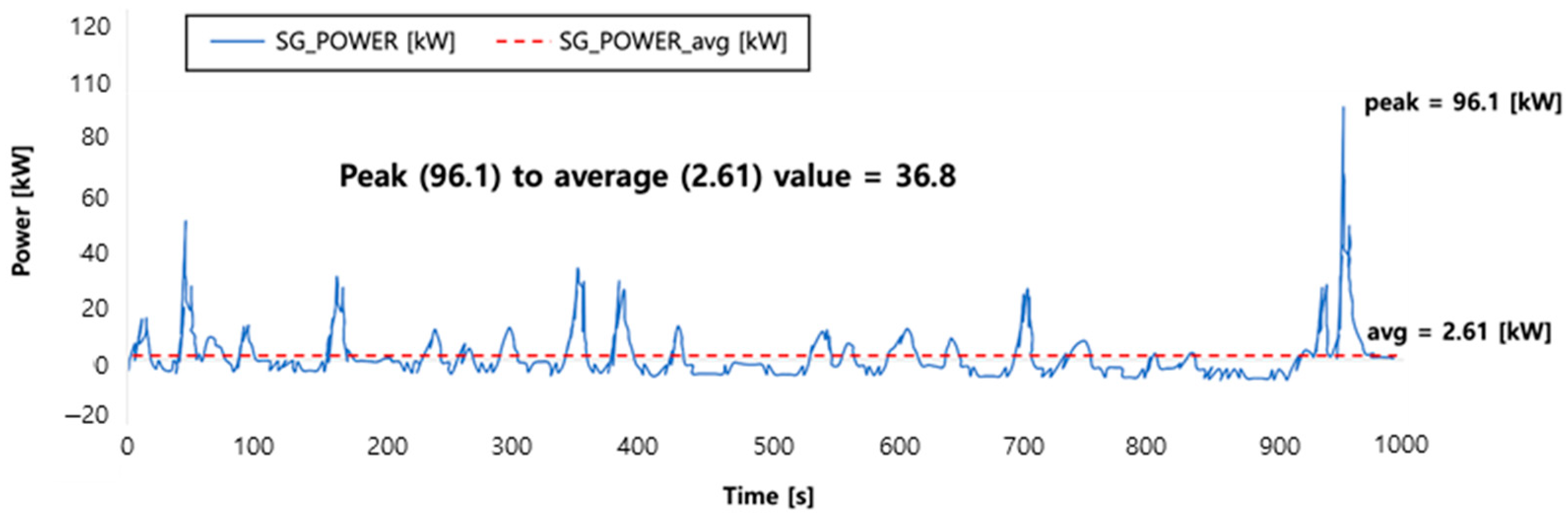
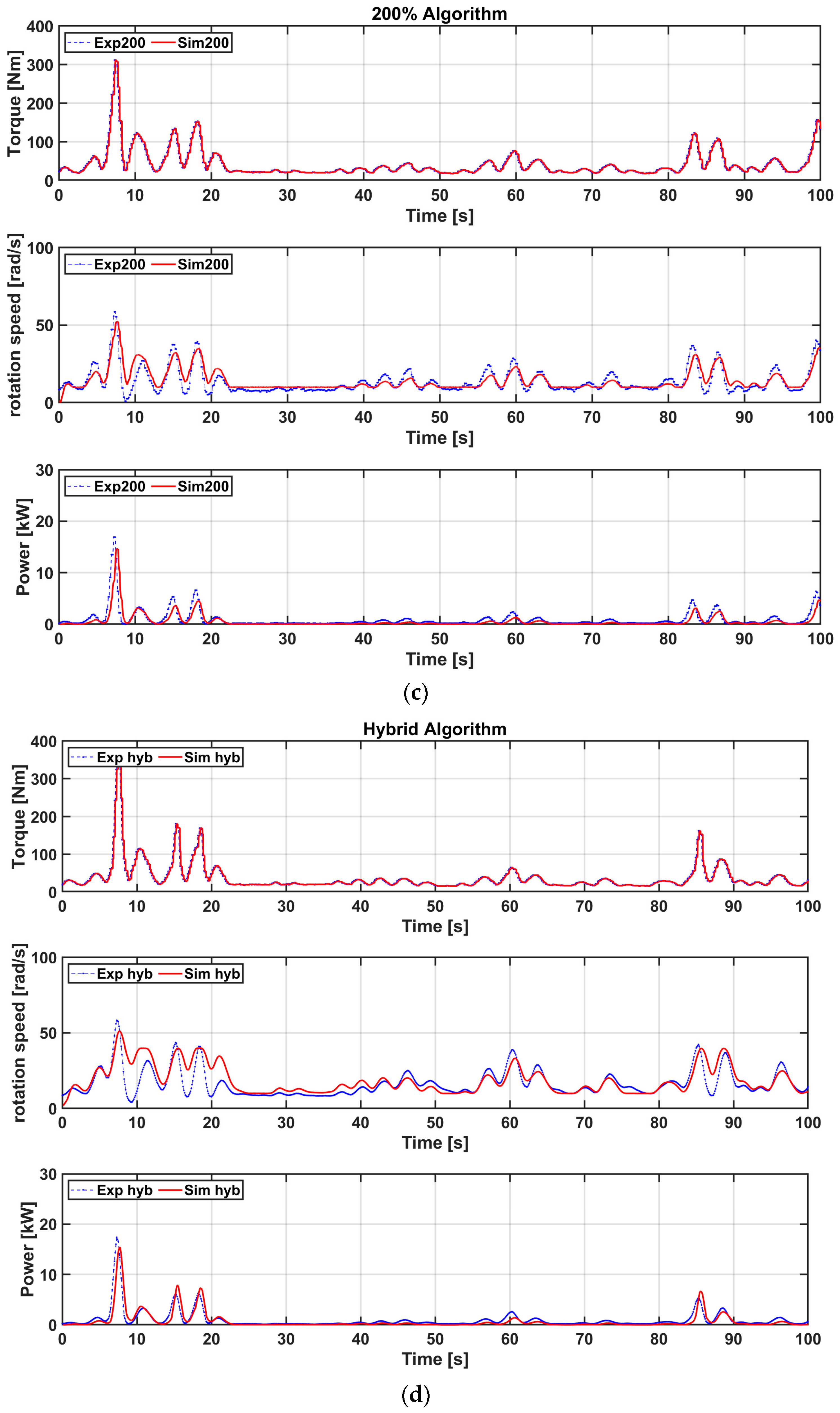
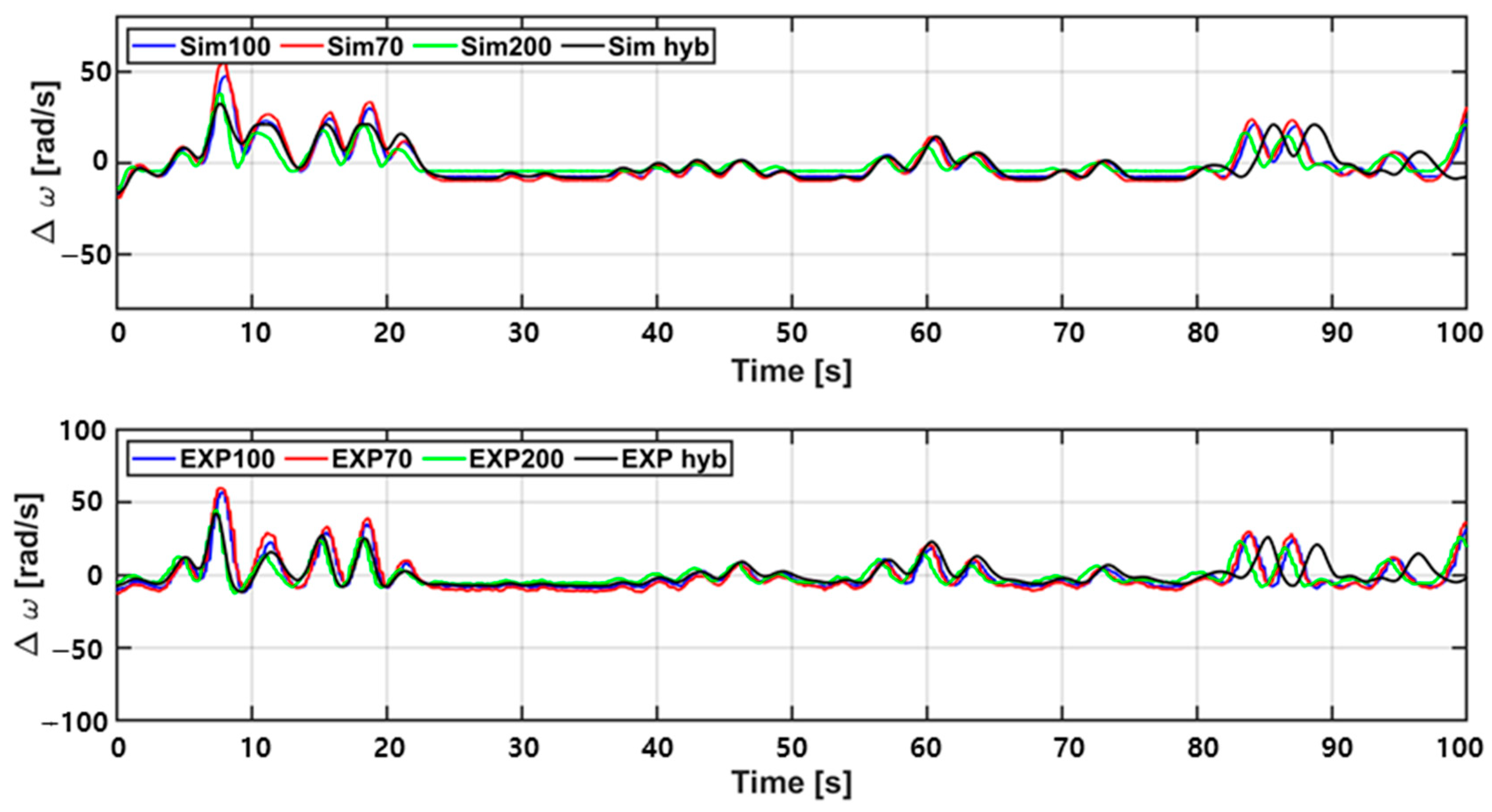
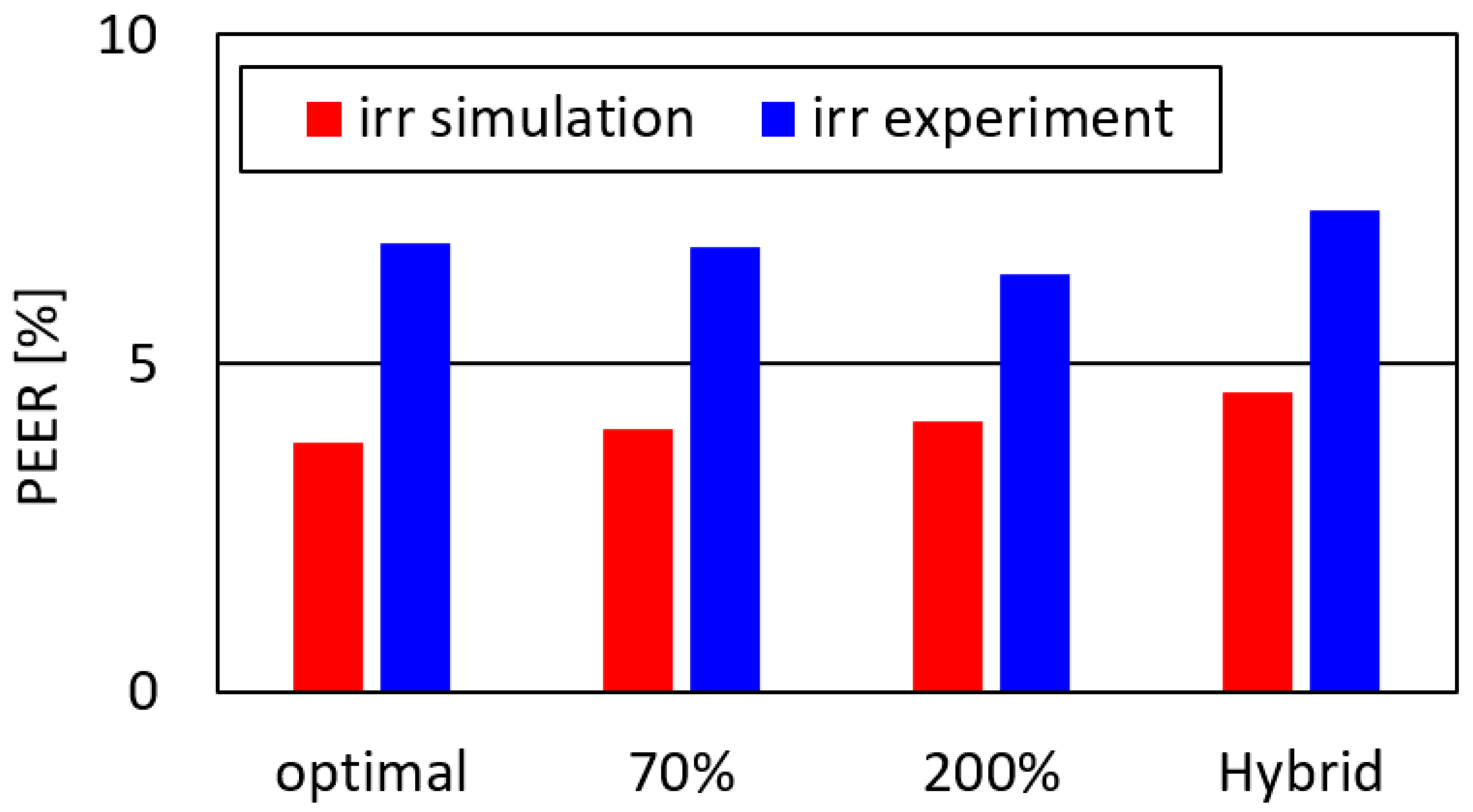
4.2. Analysis of Algorithm Characteristics under Irregular Wave Conditions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Falnes, J. A review of wave-energy extraction. Mar. Struct. 2007, 20, 185–201. [Google Scholar] [CrossRef]
- Falcao, A.O. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar] [CrossRef]
- Ekstrom, R.; Ekergård, B.; Leijon, M. Electrical damping of linear generators for wave energy converters—A review. Renew. Sustain. Energy Rev. 2015, 42, 116–128. [Google Scholar] [CrossRef]
- Lopez, I.; Andreu, J.; Ceballos, S.; Martínez de Alegría, I.; Kortabarria, I. Review of wave energy technologies and the necessary power-equipment. Renew. Sustain. Energy Rev. 2013, 27, 413–434. [Google Scholar] [CrossRef]
- Lavidas, G. Selection index for wave energy deployments (SIWED): A near-deterministic index for wave energy converters. Energy 2020, 196, 117131. [Google Scholar] [CrossRef]
- Carrelhas, A.A.D.; Gato, L.M.C.; Henriques, J.C.C. Peak shaving control in OWC wave energy converts: From concept to implementation in the Mutriku wave power plant. Renew. Sustain. Energy Rev. 2023, 180, 113299. [Google Scholar] [CrossRef]
- Zhou, B.; Hu, J.; Jin, P.; Sun, K.; Li, Y.; Ning, D. Power performance and motion response of a floating wind platform and multiple heaving wave energy converters hybrid system. Energy 2023, 265, 126314. [Google Scholar] [CrossRef]
- Faedo, N.; Peña-Sanchez, Y.; Garcia-Violini, D.; Ferri, F.; Mattiazzo, G.; Ringwood, J.V. Experimental assessment and validation of energy-maximising moment-based optimal control for a prototype wave energy converter. Control Eng. Pract. 2023, 133, 105454. [Google Scholar] [CrossRef]
- Wang, L.; Isberg, J.; Tedeschi, E. Review of control strategies for wave energy conversion systems and their validation: The wave-to-wire approach. Renew. Sustain. Energy Rev. 2018, 81, 366–379. [Google Scholar] [CrossRef]
- Hong, Y.; Waters, R.; Bostrom, C.; Eriksson, M.; Engström, J.; Leijon, M. Review on electrical control strategies for wave energy converting systems. Renew. Sustain. Energy Rev. 2014, 31, 329–342. [Google Scholar] [CrossRef]
- Kurniawan, A.; Moan, T. Optimal geometries for wave absorbers oscillating about a fixed axis. IEEE J. Ocean Eng. 2013, 38, 117–130. [Google Scholar] [CrossRef]
- Shadman, M.; Estefen, S.F.; Rodriguez, C.A.; Nogueira, I.C.M. A geometrical optimization method applied to a heaving point absorber wave energy converter. Renew. Energy 2018, 115, 533–546. [Google Scholar] [CrossRef]
- Garcia-Rosa, P.B.; Bacelli, G.; Ringwood, J.V. Control-informed geometric optimization of wave energy converters: The impact of device motion and force constraints. Energies 2015, 8, 13672–13687. [Google Scholar] [CrossRef]
- Wen, Y.; Wang, W.; Liu, H.; Mao, L.; Mi, H.; Wang, W.; Zhang, G. A shape optimization method of a specified point Absorber wave energy converter for the south China sea. Energies 2018, 11, 2645. [Google Scholar] [CrossRef]
- Suchithra, R.; Ezhilsabareesh, K.; Samad, A. Development of a reduced order wave to wire model of an OWC wave energy converter for control system analysis. Ocean Eng. 2019, 172, 614–628. [Google Scholar] [CrossRef]
- Song, S.K.; Park, J.B. Control strategy of an impulse turbine for an oscillating water column-wave energy converter in time-domain using Lyapunov stability method. Appl. Sci. 2016, 6, 281. [Google Scholar] [CrossRef]
- Heller, V. Development of wave devices from initial conception to commercial demonstration. In Comprehensive Renewable Energy; Sayigh, A., Ed.; Elsevier: Oxford, UK, 2012; pp. 79–110. [Google Scholar] [CrossRef]
- Falcao, A.F.O.; Henriques, J.C.C. Model-prototype similarity of oscillating water-column wave energy converters. Int. J. Mar. Energy 2014, 6, 18–34. [Google Scholar] [CrossRef]
- Henriques, J.C.C.; Gomes, R.P.F.; Gato, L.M.C.; Falcao, A.F.O.; Robles, E.; Ceballos, S. Testing and control of a power take-off system for an oscillating-water-column wave energy converter. Renew. Energy 2016, 85, 714–724. [Google Scholar] [CrossRef]
- Falcao, A.F.O. Control of an oscillating-water-column wave power plant for maximum energy production. Appl. Ocean Res. 2002, 24, 73–82. [Google Scholar] [CrossRef]
- Falcao, A.F.O.; Henriques, J.C.C.; Gato, L.M.C.; Gomes, R.P.F. Air turbine choice and optimization for floating oscillating-water-column wave energy converter. Ocean Eng. 2014, 75, 148–156. [Google Scholar] [CrossRef]
- Chan, R.; Kim, K.W.; Park, J.Y.; Park, S.W.; Kim, K.H.; Kwak, S.S. Power performance analysis according to the configuration and load control algorithm of power take-off system for oscillating water column type wave energy converters. Energies 2020, 13, 6415. [Google Scholar] [CrossRef]
- Carrelhas, A.A.D.; Gato, L.M.C.; Henriques, J.C.C.; Falcão, A.F.O.; Varandasb, J. Test results of a 30 kW self-rectifying biradial air turbine-generator prototype. Renew. Sustain. Energy Rev. 2019, 109, 187–198. [Google Scholar] [CrossRef]
- Henriques, J.C.C.; Gato, L.M.C.; Lemos, J.M.; Gomes, R.P.F.; Falcao, A.F.O. Peak-power control of a grid-integrated oscillating water column wave energy converter. Energy 2016, 109, 378–390. [Google Scholar] [CrossRef]
- Roh, C. Enhancing power generation stability in oscillating-water-column wave energy converters through deep-learning-based time delay compensation. Processes 2023, 11, 1787. [Google Scholar] [CrossRef]
- Krause, P.C.; Wasynczuk, O.; Sudhoff, S.D. (Eds.) Reference-Frame Theory. In Analysis of Electric Machinery and Drive Systems, 3rd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2013; Volume 75, pp. 86–120. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optimal | 70% | 200% | Hybrid | |
|---|---|---|---|---|
| Simulation [kWh] | 5.66 | 6.75 | 4.35 | 5.05 |
| Experiment [kWh] | 6.86 | 7.34 | 5.07 | 5.88 |
| Optimal | 70% | 200% | Hybrid | |
|---|---|---|---|---|
| Simulation [kWh] | 0.68 | 0.70 | 0.60 | 0.68 |
| Experiment [kWh] | 1.31 | 1.45 | 1.05 | 1.21 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chae, H.; Roh, C. Hybrid Torque Coefficient Control of Average-to-Peak Ratio for Turbine Angular Velocity Reduction in Oscillating-Water-Column-Type Wave Energy Converter. J. Mar. Sci. Eng. 2024, 12, 1080. https://doi.org/10.3390/jmse12071080
Chae H, Roh C. Hybrid Torque Coefficient Control of Average-to-Peak Ratio for Turbine Angular Velocity Reduction in Oscillating-Water-Column-Type Wave Energy Converter. Journal of Marine Science and Engineering. 2024; 12(7):1080. https://doi.org/10.3390/jmse12071080
Chicago/Turabian StyleChae, Hyeongyo, and Chan Roh. 2024. "Hybrid Torque Coefficient Control of Average-to-Peak Ratio for Turbine Angular Velocity Reduction in Oscillating-Water-Column-Type Wave Energy Converter" Journal of Marine Science and Engineering 12, no. 7: 1080. https://doi.org/10.3390/jmse12071080
APA StyleChae, H., & Roh, C. (2024). Hybrid Torque Coefficient Control of Average-to-Peak Ratio for Turbine Angular Velocity Reduction in Oscillating-Water-Column-Type Wave Energy Converter. Journal of Marine Science and Engineering, 12(7), 1080. https://doi.org/10.3390/jmse12071080