
Task-Driven Learning Downsampling Network Based Phase-Resolved Wave Fields Reconstruction with Remote Optical Observations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
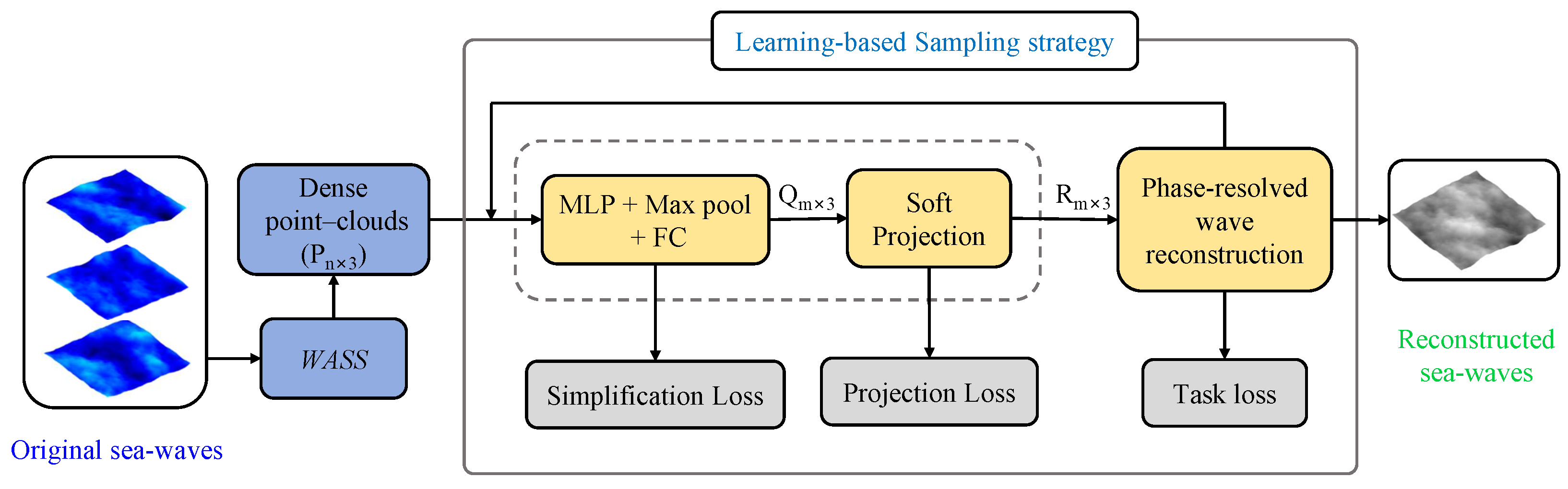
2. Proposed Methodology
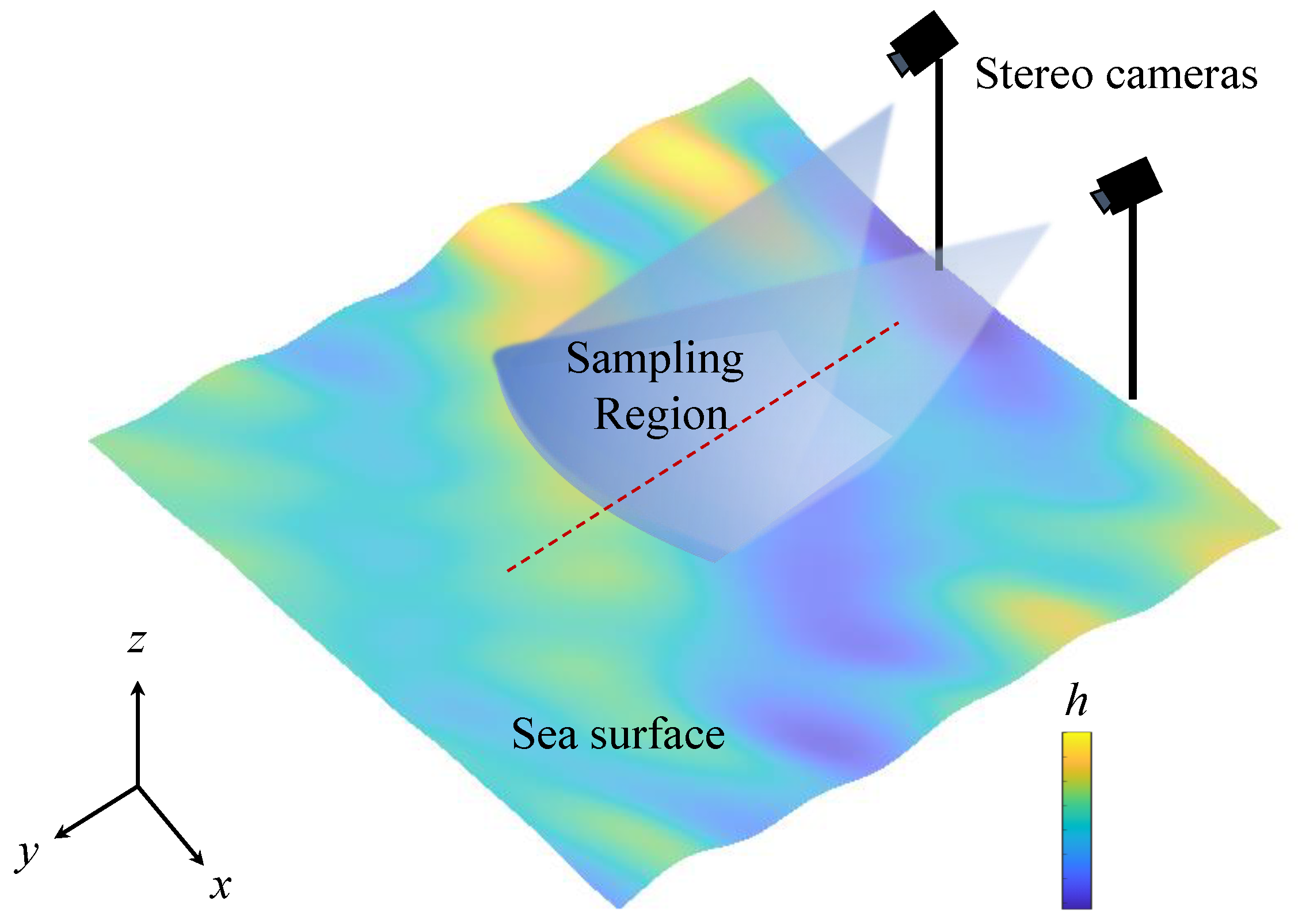
3. Experimental Design and Construction of Data Sets
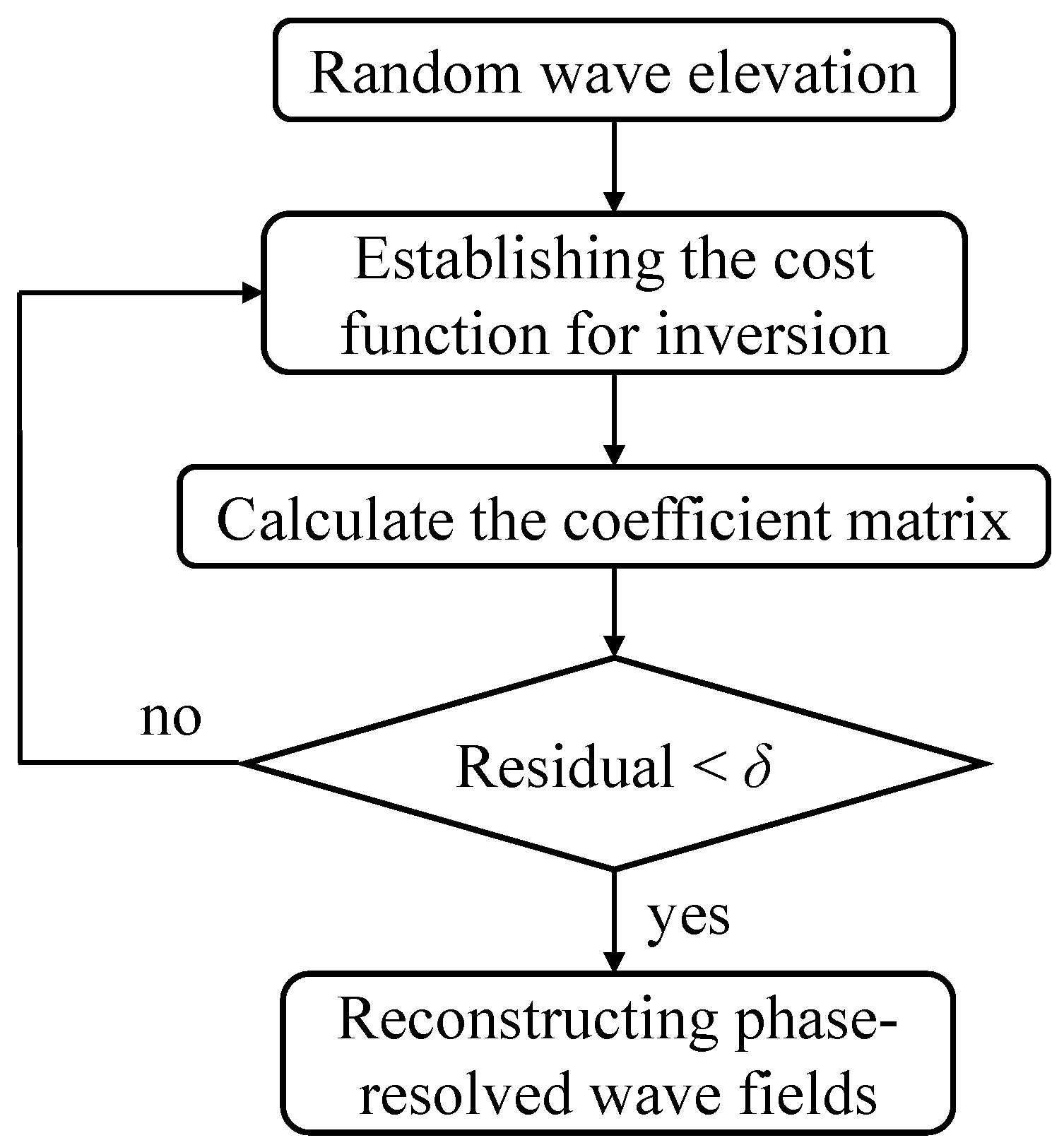
3.1. Phase-Resolved Wave Reconstruction Algorithms
3.2. Constructing Datasets
4. Experimental Results and Discussion
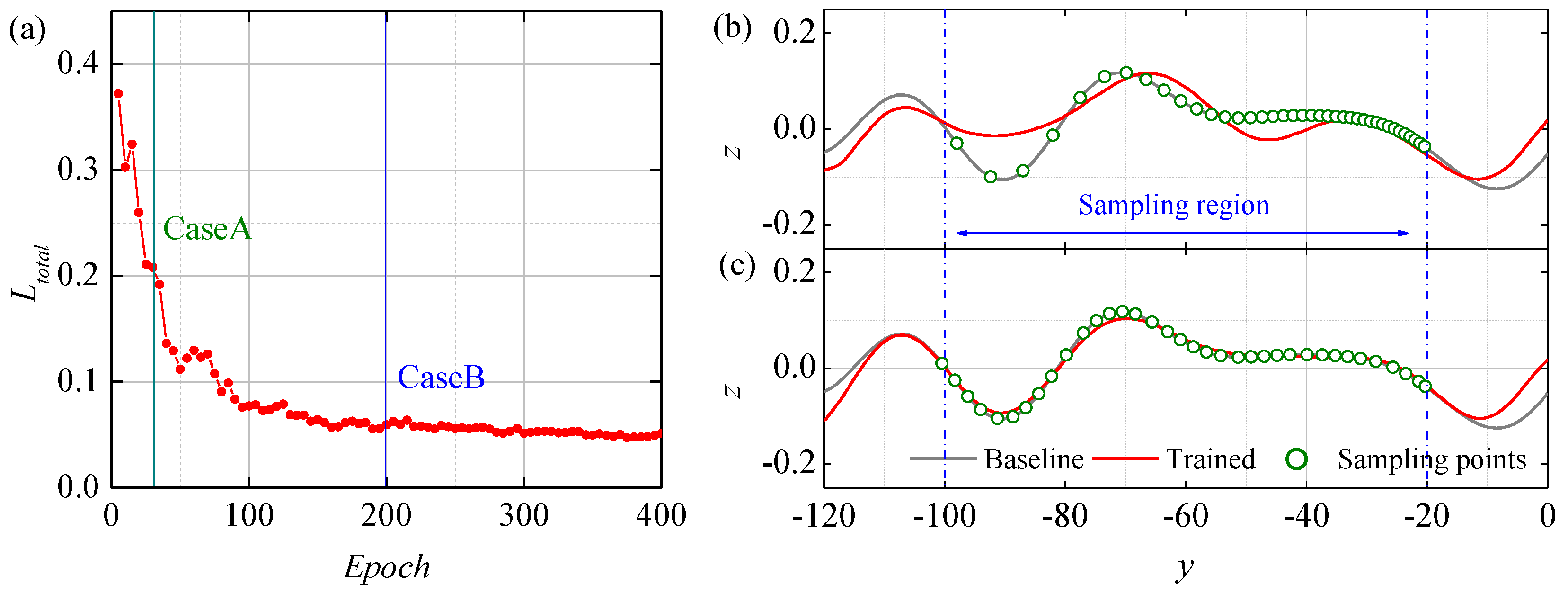
4.1. Training and Evaluation Based on Simulated Wave Datasets
4.2. Training and Evaluation Based on Real Wave Data Set
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, G.; Weiss, G.; Mueller, M.; Townley, S.; Belmont, M.R. Wave energy converter control by wave prediction and dynamic programming. Renew. Energy 2012, 48, 392–403. [Google Scholar] [CrossRef]
- Ma, Y.; Sclavounos, P.D.; Cross-Whiter, J.; Arora, D. Wave forecast and its application to the optimal control of offshore floating wind turbine for load mitigation. Renew. Energy 2018, 128, 163–176. [Google Scholar] [CrossRef]
- Kusters, J.G.; Cockrell, K.L.; Connell, B.S.H.; Rudzinsky, J.P.; Vinciullo, V.J. FutureWaves™: A Real-Time Ship Motion Forecasting System employing Advanced Wave-Sensing Radar. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016. [Google Scholar] [CrossRef]
- Jiang, H.K.; Zhang, Y.; Zhang, Z.Y.; Luo, K.; Yi, H.L. Instability and bifurcations of electro-thermo-convection in a tilted square cavity filled with dielectric liquid. Phys. Fluids 2022, 34, 064116. [Google Scholar] [CrossRef]
- Rajendran, S.; Fonseca, N.; Guedes Soares, C.; Clauss, G.n.F.; Klein, M. Time domain comparison with experiments for ship motions and structural loads on a container ship in abnormal waves. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; Volume 44380, pp. 919–927. [Google Scholar]
- Kim, I.C.; Ducrozet, G.; Perignon, Y. Development of phase-resolved real-time wave forecasting with unidirectional and multidirectional seas. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Boston, MA, USA, 20–23 August 2023; American Society of Mechanical Engineers: Boston, MA, USA, 2023; Volume 86878, p. V005T06A104. [Google Scholar]
- Abusedra, L.; Belmont, M. Prediction diagrams for deterministic sea wave prediction and the introduction of the data extension prediction method. Int. Shipbuild. Prog. 2011, 58, 59–81. [Google Scholar]
- Naaijen, P.; Huijsmans, R. Real time wave forecasting for real time ship motion predictions. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008; Volume 48210, pp. 607–614. [Google Scholar]
- Nguyen, H.N.; Tona, P. Short-term wave force prediction for wave energy converter control. Control Eng. Pract. 2018, 75, 26–37. [Google Scholar] [CrossRef]
- Nguyen, H.N.; Tona, P. Wave excitation force estimation for wave energy converters of the point-absorber type. IEEE Trans. Control Syst. Technol. 2017, 26, 2173–2181. [Google Scholar] [CrossRef]
- Kim, I.C.; Ducrozet, G.; Leroy, V.; Bonnefoy, F.; Perignon, Y.; Delacroix, S. Numerical and experimental investigation on deterministic prediction of ocean surface wave and wave excitation force. Appl. Ocean Res. 2024, 142, 103834. [Google Scholar] [CrossRef]
- Desmars, N.; Hartmann, M.; Behrendt, J.; Hoffmann, N.; Klein, M. Nonlinear deterministic reconstruction and prediction of remotely measured ocean surface waves. J. Fluid Mech. 2023, 975, A8. [Google Scholar] [CrossRef]
- Zhang, Z.; Tang, T.; Li, Y. Spatial estimation of unidirectional wave evolution based on ensemble data assimilation. Eur. J.-Mech.-B/Fluids 2024, 106, 1–12. [Google Scholar] [CrossRef]
- Desmars, N.; Bonnefoy, F.; Grilli, S.T.; Ducrozet, G.; Perignon, Y.; Guérin, C.A.; Ferrant, P. Experimental and numerical assessment of deterministic nonlinear ocean waves prediction algorithms using non-uniformly sampled wave gauges. Ocean Eng. 2020, 212, 107659. [Google Scholar] [CrossRef]
- Jiang, H.K.; Luo, K.; Zhang, Z.Y.; Wu, J.; Yi, H.L. Global linear instability analysis of thermal convective flow using the linearized lattice Boltzmann method. J. Fluid Mech. 2022, 944, A31. [Google Scholar] [CrossRef]
- Simpson, A.; Haller, M.; Walker, D.; Lynett, P.; Honegger, D. Wave-by-wave forecasting via assimilation of marine radar data. J. Atmos. Ocean. Technol. 2020, 37, 1269–1288. [Google Scholar] [CrossRef]
- Bruneton, E.; Neyret, F.; Holzschuch, N. Real-time realistic ocean lighting using seamless transitions from geometry to BRDF. Comput. Graph. Forum 2010, 29, 487–496. [Google Scholar] [CrossRef]
- Babanin, A.V.; Soloviev, Y.P. Variability of directional spectra of wind-generated waves, studied by means of wave staff arrays. Mar. Freshw. Res. 1998, 49, 89–101. [Google Scholar] [CrossRef]
- Nwogu, O. Maximum entropy estimation of directional wave spectra from an array of wave probes. Appl. Ocean Res. 1989, 11, 176–182. [Google Scholar] [CrossRef]
- Luo, K.; Jiang, H.K.; Wu, J.; Zhang, M.; Yi, H.L. Stability and bifurcation of annular electro-thermo-convection. J. Fluid Mech. 2023, 966, A13. [Google Scholar] [CrossRef]
- Vogelzang, J.; Boogaard, K.; Reichert, K.; Hessner, K. Wave height measurements with navigation radar. Int. Arch. Photogramm. Remote Sens. 2000, 33, 1652–1659. [Google Scholar]
- Irish, J.L.; Wozencraft, J.M.; Cunningham, A.G.; Giroud, C. Nonintrusive measurement of ocean waves: Lidar wave gauge. J. Atmos. Ocean. Technol. 2006, 23, 1559–1572. [Google Scholar] [CrossRef]
- Brock, J.C.; Purkis, S.J. The emerging role of lidar remote sensing in coastal research and resource management. J. Coast. Res. 2009, 53, 1–5. [Google Scholar] [CrossRef]
- Kabel, T.; Georgakis, C.T.; Zeeberg, A.R. Mapping ocean waves using new lidar equipment. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Honolulu, HI, USA, 16–21 June 2019. [Google Scholar]
- Evans, A. Laser scanning applied to hydraulic modeling. In Proceedings of the International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Commission V Symposium, Hong Kong, China, 26–28 May 2010. [Google Scholar]
- Shemdin, O.H.; Tran, H.M.; Wu, S. Directional measurement of short ocean waves with stereophotography. J. Geophys. Res. Ocean. 1988, 93, 13891–13901. [Google Scholar] [CrossRef]
- Kim, I.C.; Ducrozet, G.; Bonnefoy, F.; Leroy, V.; Perignon, Y. Real-time phase-resolved ocean wave prediction in directional wave fields: Enhanced algorithm and experimental validation. Ocean Eng. 2023, 276, 114212. [Google Scholar] [CrossRef]
- Belmont, M. Wave shadowing effects on phase resolved wave spectra estimated from radar backscatter: Part 1: An investigation of the errors due to wave shadowing in the spectral averaging approach. Ocean Eng. 2023, 267, 113409. [Google Scholar] [CrossRef]
- Xiao, Z.; Huang, W. Kd-tree based nonuniform simplification of 3D point cloud. In Proceedings of the 2009 Third International Conference on Genetic and Evolutionary Computing, Guilin, China, 14–17 October 2009; pp. 339–342. [Google Scholar]
- Eldar, Y.; Lindenbaum, M.; Porat, M.; Zeevi, Y.Y. The farthest point strategy for progressive image sampling. IEEE Trans. Image Process. 1997, 6, 1305–1315. [Google Scholar] [CrossRef] [PubMed]
- Luebke, D.P. A developer’s survey of polygonal simplification algorithms. IEEE Comput. Graph. Appl. 2001, 21, 24–35. [Google Scholar] [CrossRef]
- Quach, M.; Pang, J.; Tian, D.; Valenzise, G.; Dufaux, F. Survey on deep learning-based point cloud compression. Front. Signal Process. 2022, 2, 846972. [Google Scholar] [CrossRef]
- Shi, B.Q.; Liang, J.; Liu, Q. Adaptive simplification of point cloud using k-means clustering. Comput.-Aided Des. 2011, 43, 910–922. [Google Scholar] [CrossRef]
- Benhabiles, H.; Aubreton, O.; Barki, H.; Tabia, H. Fast simplification with sharp feature preserving for 3D point clouds. In Proceedings of the 2013 11th international symposium on programming and systems (ISPS), Algiers, Algeria, 22–24 April 2013; pp. 47–52. [Google Scholar]
- Alexiou, E.; Tung, K.; Ebrahimi, T. Towards neural network approaches for point cloud compression. In Proceedings of the SPIE Applications of Digital Image Processing XLIII, Online, 24 August–4 September 2020; Volume 11510, pp. 18–37. [Google Scholar]
- Qian, Y.; Hou, J.; Zhang, Q.; Zeng, Y.; Kwong, S.; He, Y. Mops-net: A matrix optimization-driven network fortask-oriented 3d point cloud downsampling. arXiv 2020, arXiv:2005.00383. [Google Scholar]
- Cheng, T.Y.; Hu, Q.; Xie, Q.; Trigoni, N.; Markham, A. Meta-sampler: Almost-universal yet task-oriented sampling for point clouds. In Proceedings of the European Conference on Computer Vision, Tel Aviv, Israel, 23–27 October 2022; pp. 694–710. [Google Scholar]
- Hong, C.Y.; Chou, Y.Y.; Liu, T.L. Attention discriminant sampling for point clouds. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 2–6 October 2023; pp. 14429–14440. [Google Scholar]
- Dovrat, O.; Lang, I.; Avidan, S. Learning to sample. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 2760–2769. [Google Scholar]
- Ye, Y.; Yang, X.; Ji, S. APSNet: Attention based point cloud sampling. arXiv 2022, arXiv:2210.05638. [Google Scholar]
- Wang, X.; Jin, Y.; Cen, Y.; Wang, T.; Tang, B.; Li, Y. Lightn: Light-weight transformer network for performance-overhead tradeoff in point cloud downsampling. arXiv 2023, arXiv:2202.06263. [Google Scholar] [CrossRef]
- Lin, C.; Li, C.; Liu, Y.; Chen, N.; Choi, Y.K.; Wang, W. Point2skeleton: Learning skeletal representations from point clouds. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 19–25 June 2021; pp. 4277–4286. [Google Scholar]
- Wen, C.; Yu, B.; Tao, D. Learnable skeleton-aware 3d point cloud sampling. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 17671–17681. [Google Scholar]
- Zhang, G.; Zhao, W.; Liu, J.; Liu, X. REPS: Reconstruction-based Point Cloud Sampling. arXiv 2024, arXiv:2403.05047. [Google Scholar]
- Makarynskyy, O. Neural pattern recognition and prediction for wind wave data assimilation. Pac Ocean. 2005, 3, 76–85. [Google Scholar]
- Fringer, O.B.; Dawson, C.N.; He, R.; Ralston, D.K.; Zhang, Y.J. The future of coastal and estuarine modeling: Findings from a workshop. Ocean Model. 2019, 143, 101458. [Google Scholar] [CrossRef]
- Parker, K.; Hill, D. Evaluation of bias correction methods for wave modeling output. Ocean Model. 2017, 110, 52–65. [Google Scholar] [CrossRef]
- Ellenson, A.; Pei, Y.; Wilson, G.; Özkan-Haller, H.T.; Fern, X. An application of a machine learning algorithm to determine and describe error patterns within wave model output. Coast. Eng. 2020, 157, 103595. [Google Scholar] [CrossRef]
- Wang, N.; Chen, Q.; Zhu, L.; Sun, H. Integration of data-driven and physics-based modeling of wind waves in a shallow estuary. Ocean Model. 2022, 172, 101978. [Google Scholar] [CrossRef]
- Wang, N.; Chen, Q.; Chen, Z. Reconstruction of nearshore wave fields based on physics-informed neural networks. Coast. Eng. 2022, 176, 104167. [Google Scholar] [CrossRef]
- Bergamasco, F.; Torsello, A.; Sclavo, M.; Barbariol, F.; Benetazzo, A. WASS: An open-source pipeline for 3D stereo reconstruction of ocean waves. Comput. Geosci. 2017, 107, 28–36. [Google Scholar] [CrossRef]
- Guimarães, P.V.; Ardhuin, F.; Bergamasco, F.; Leckler, F.; Filipot, J.F.; Shim, J.S.; Dulov, V.; Benetazzo, A. A data set of sea surface stereo images to resolve space-time wave fields. Sci. Data 2020, 7, 145. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mou, T.; Shen, Z.; Xue, G. Task-Driven Learning Downsampling Network Based Phase-Resolved Wave Fields Reconstruction with Remote Optical Observations. J. Mar. Sci. Eng. 2024, 12, 1082. https://doi.org/10.3390/jmse12071082
Mou T, Shen Z, Xue G. Task-Driven Learning Downsampling Network Based Phase-Resolved Wave Fields Reconstruction with Remote Optical Observations. Journal of Marine Science and Engineering. 2024; 12(7):1082. https://doi.org/10.3390/jmse12071082
Chicago/Turabian StyleMou, Tianyu, Zhipeng Shen, and Guangshi Xue. 2024. "Task-Driven Learning Downsampling Network Based Phase-Resolved Wave Fields Reconstruction with Remote Optical Observations" Journal of Marine Science and Engineering 12, no. 7: 1082. https://doi.org/10.3390/jmse12071082
APA StyleMou, T., Shen, Z., & Xue, G. (2024). Task-Driven Learning Downsampling Network Based Phase-Resolved Wave Fields Reconstruction with Remote Optical Observations. Journal of Marine Science and Engineering, 12(7), 1082. https://doi.org/10.3390/jmse12071082