
The Effect of Model Input Uncertainty on the Simulation of Typical Pollutant Transport in the Coastal Waters of China

Abstract
:1. Introduction
2. Model and Methodology
2.1. Model Description
2.2. Experimental Design
3. Results
3.1. Numerical Simulation Results
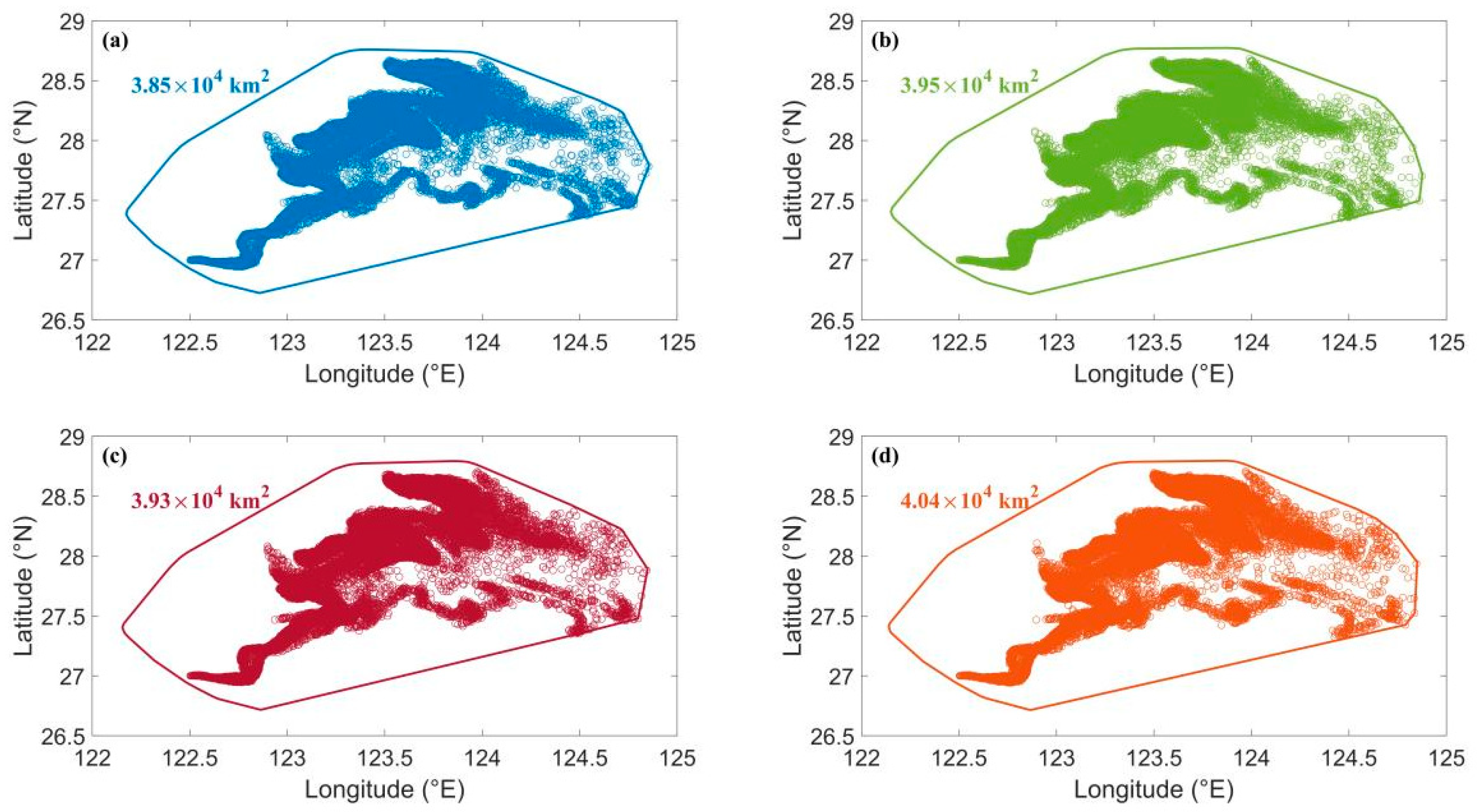
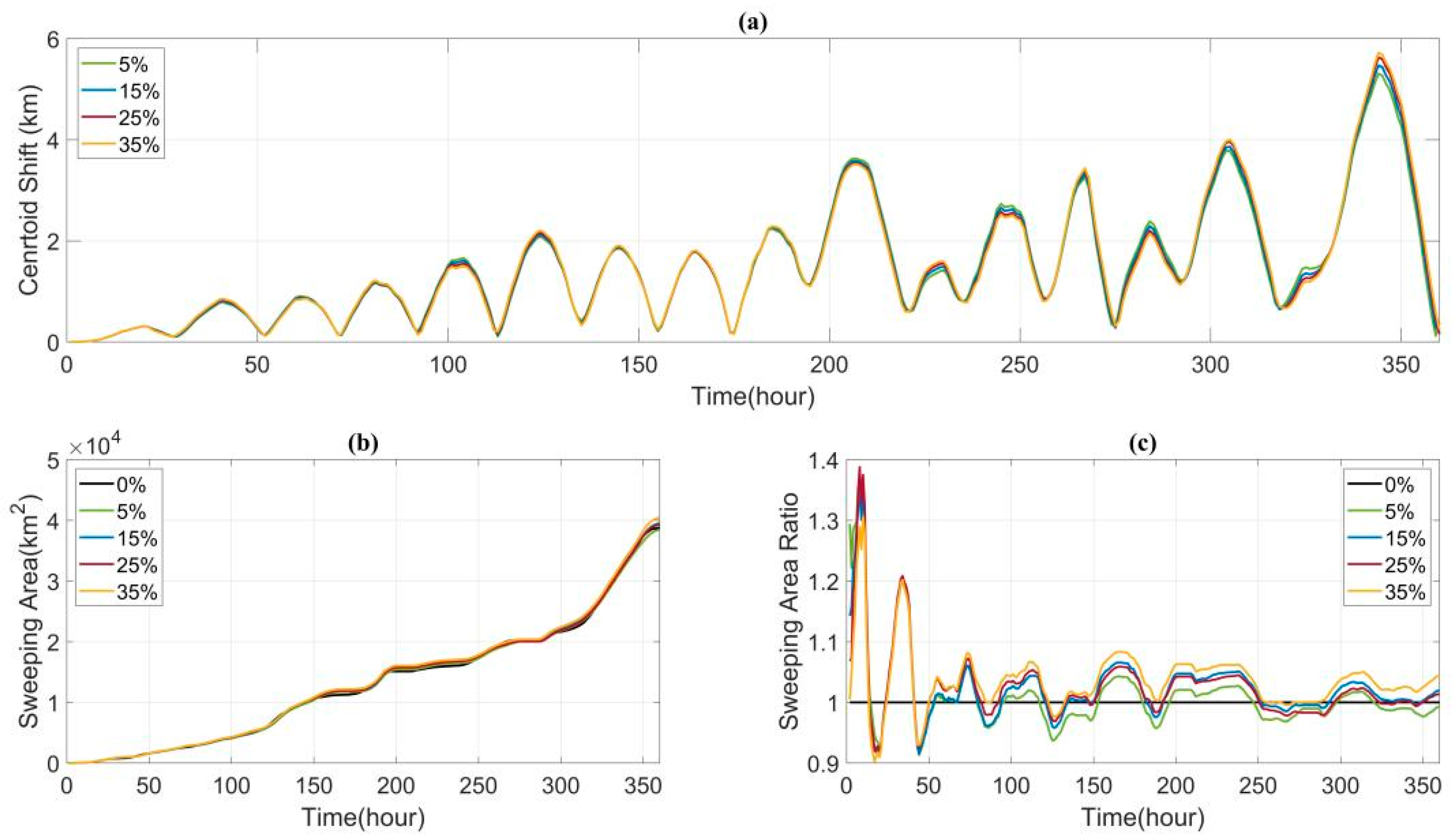
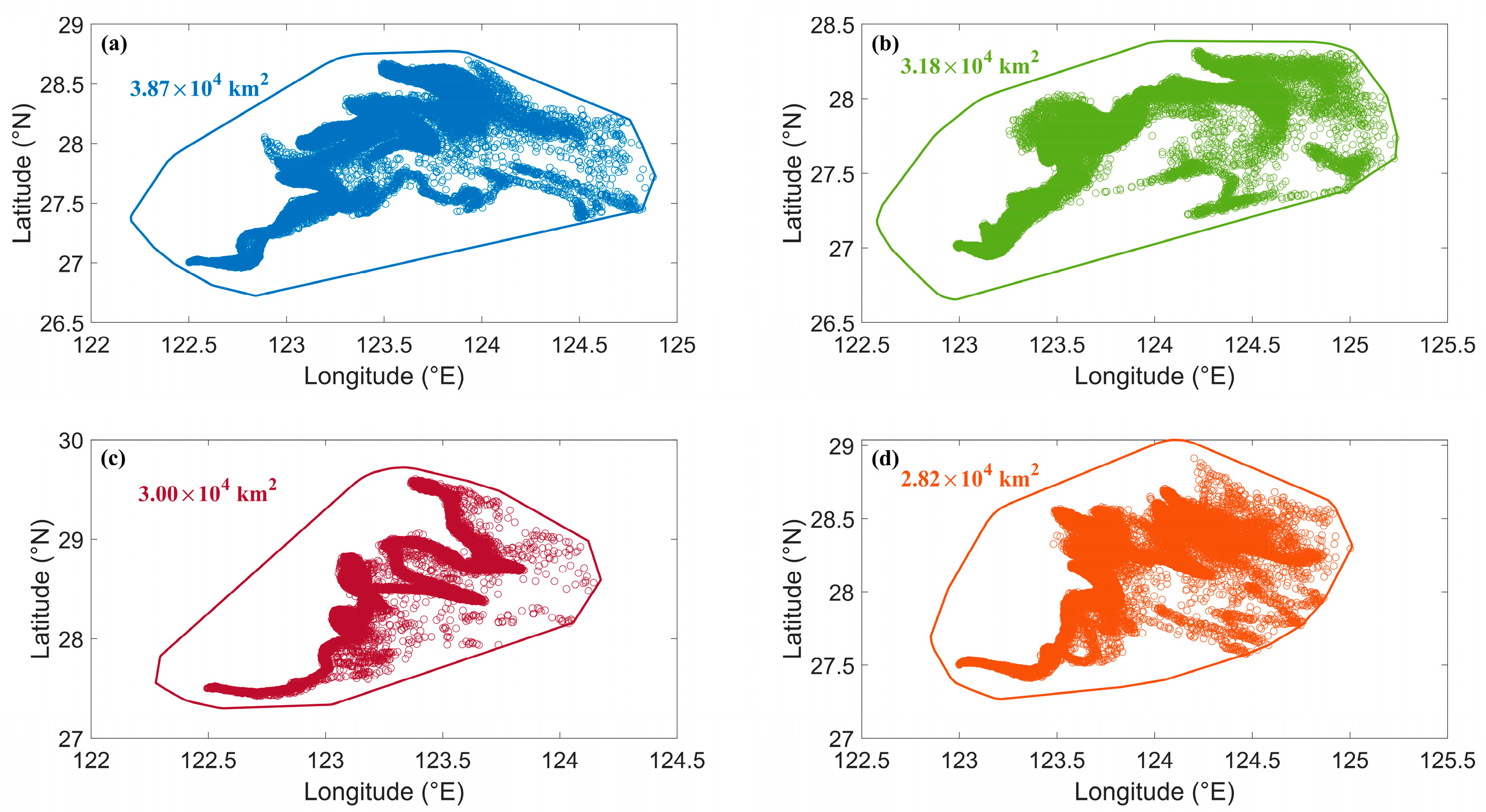
3.2. Impact of Background Flow Field Uncertainty
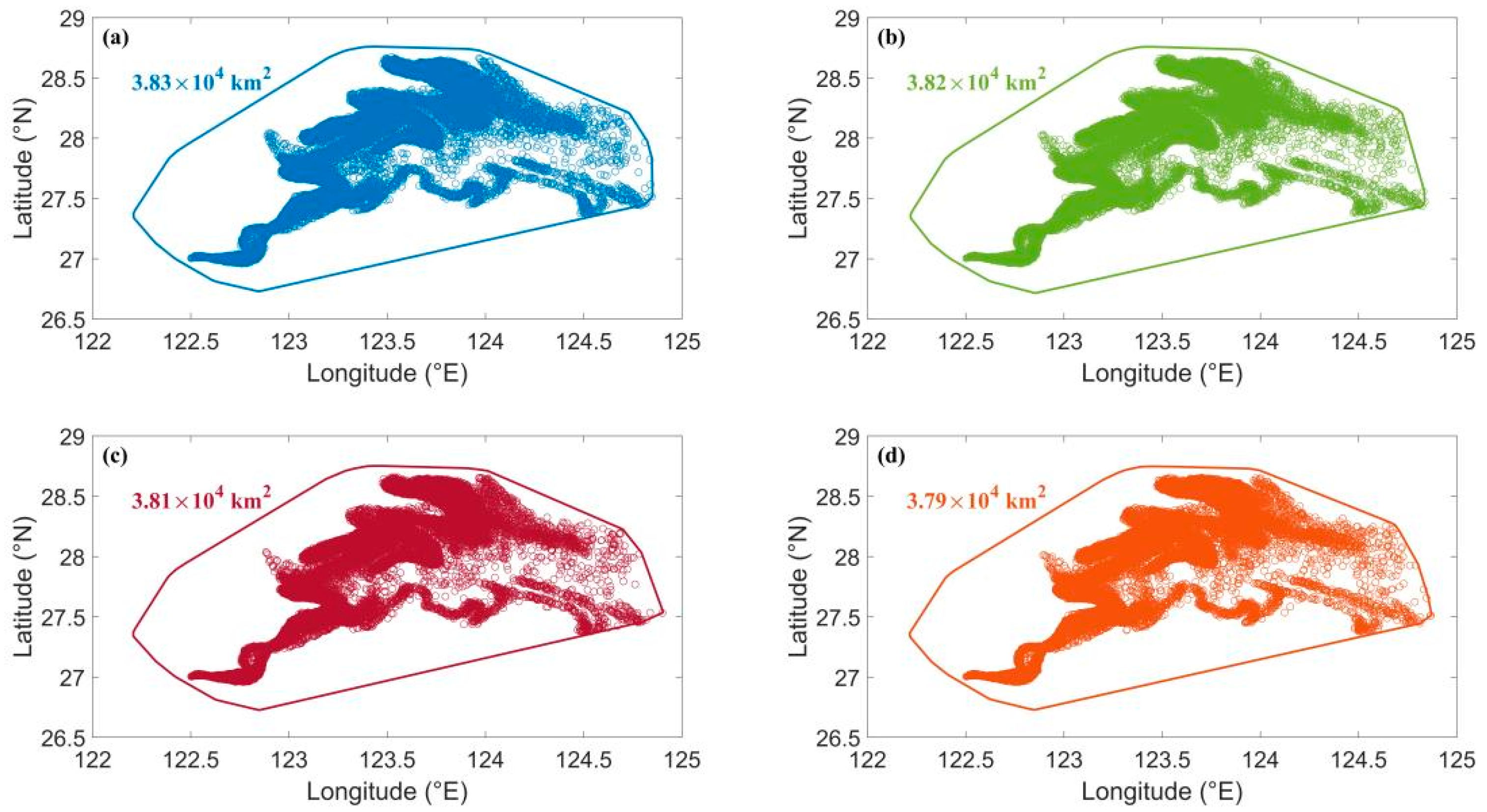
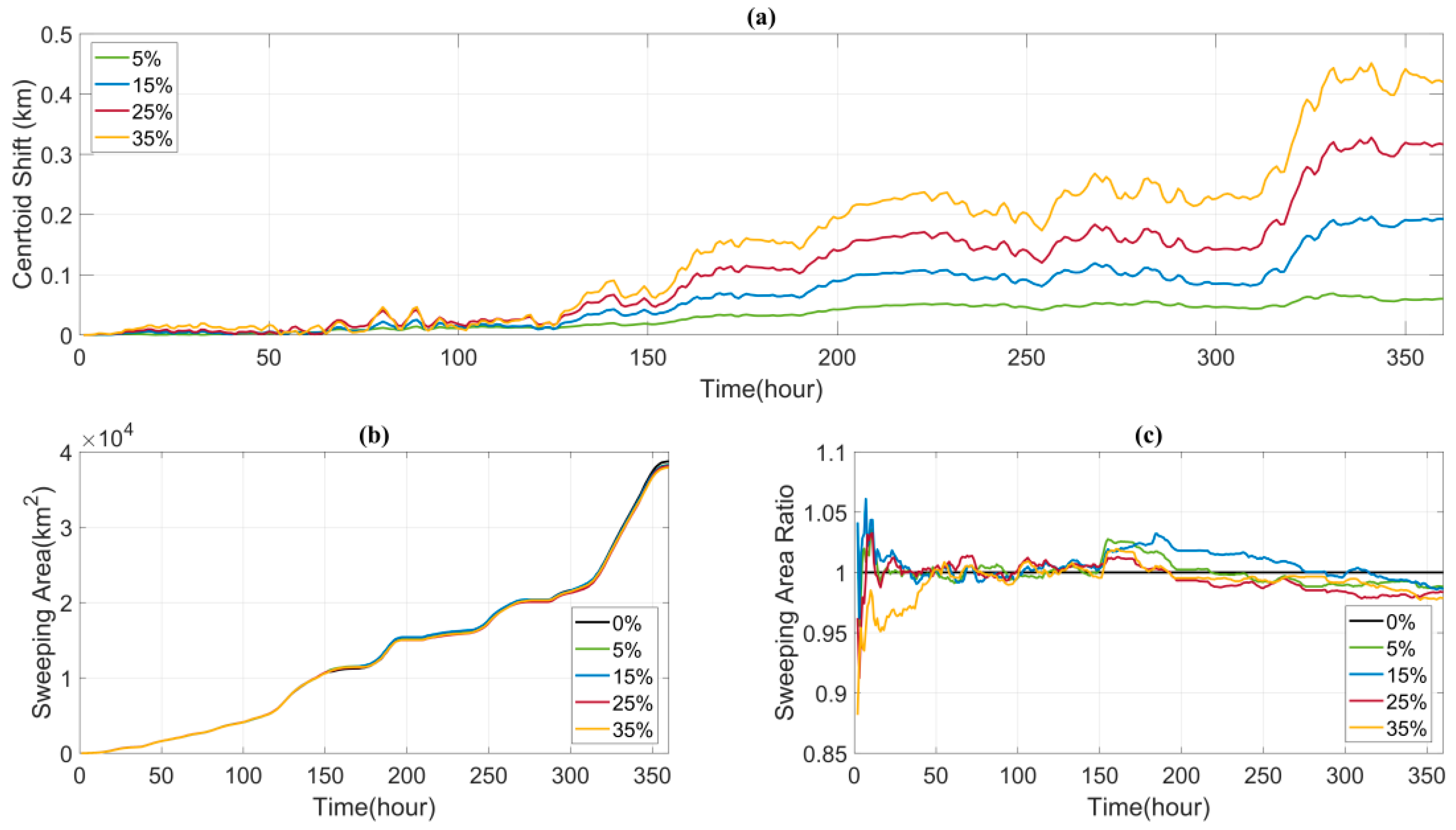
3.3. Impact of Background Wind-Field Uncertainty
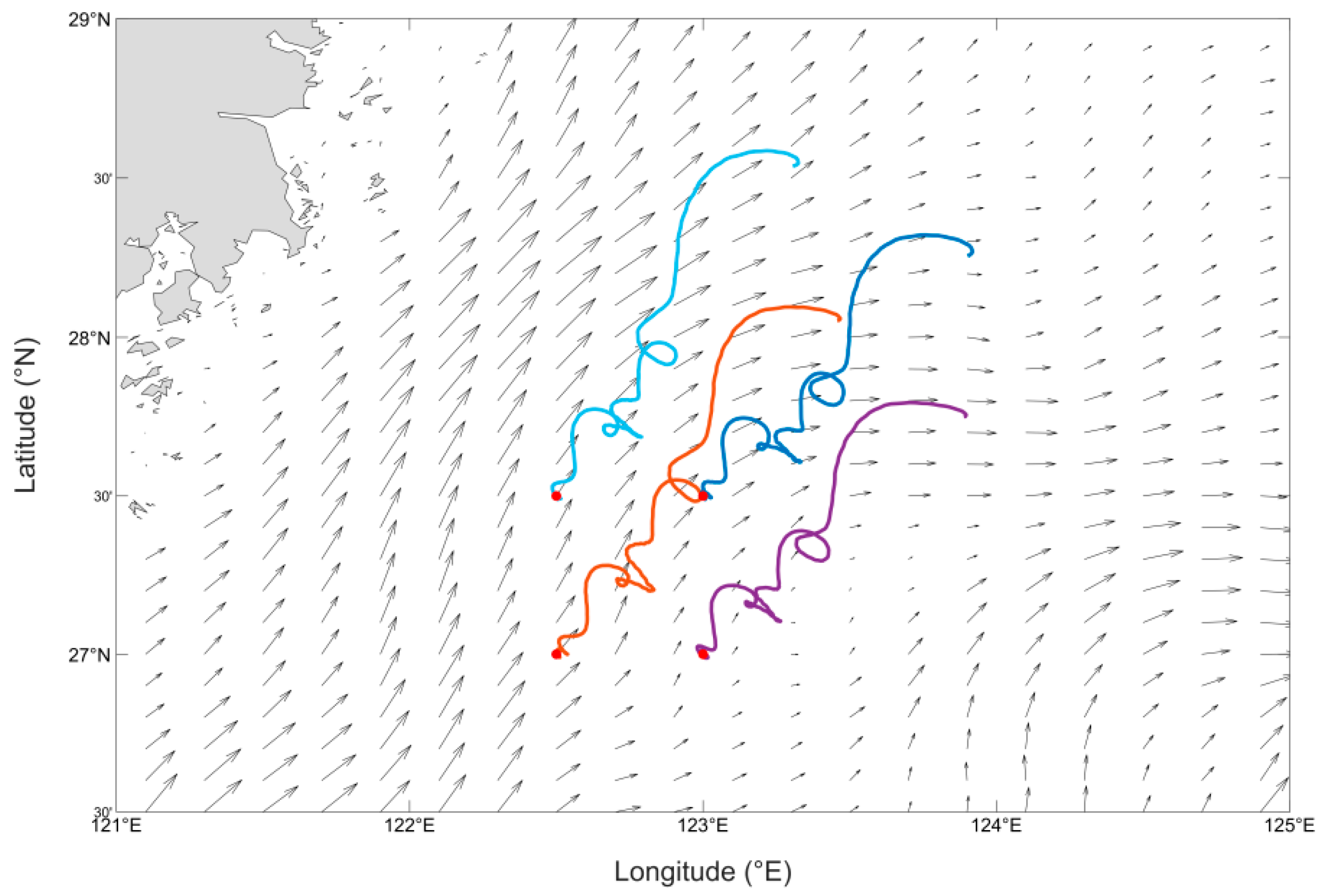
3.4. Impact of Different Initial Release Positions
4. Summary and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Long, L.; Liu, H.; Cui, M.; Zhang, C.; Liu, C. Offshore Aquaculture in China. Rev. Aquac. 2024, 16, 254–270. [Google Scholar] [CrossRef]
- Di Trapani, A.M.; Sgroi, F.; Testa, R.; Tudisca, S. Economic Comparison between Offshore and Inshore Aquaculture Production Systems of European Sea Bass in Italy. Aquaculture 2014, 434, 334–339. [Google Scholar] [CrossRef]
- Davies, I.P.; Carranza, V.; Froehlich, H.E.; Gentry, R.R.; Kareiva, P.; Halpern, B.S. Governance of Marine Aquaculture: Pitfalls, Potential, and Pathways Forward. Mar. Policy 2019, 104, 29–36. [Google Scholar] [CrossRef]
- Li, L.; Jiang, Z.; Ong, M.C.; Hu, W. Design Optimization of Mooring System: An Application to a Vessel-Shaped Offshore Fish Farm. Eng. Struct. 2019, 197, 109363. [Google Scholar] [CrossRef]
- Chu, Y.I.; Wang, C.M.; Park, J.C.; Lader, P.F. Review of Cage and Containment Tank Designs for Offshore Fish Farming. Aquaculture 2020, 519, 734928. [Google Scholar] [CrossRef]
- Aarset, B.; Carson, S.G.; Wiig, H.; Måren, I.E.; Marks, J. Lost in Translation? Multiple Discursive Strategies and the Interpretation of Sustainability in the Norwegian Salmon Farming Industry. Food Ethics 2020, 5, 11. [Google Scholar] [CrossRef]
- Kim, D.-H.; Lipton, D.; Choi, J.-Y. Analyzing the Economic Performance of the Red Sea Bream Pagrus Major Offshore Aquaculture Production System in Korea. Fish. Sci. 2012, 78, 1337–1342. [Google Scholar] [CrossRef]
- Schupp, M.F.; Kafas, A.; Buck, B.H.; Krause, G.; Onyango, V.; Stelzenmüller, V.; Davies, I.; Scott, B.E. Fishing within Offshore Wind Farms in the North Sea: Stakeholder Perspectives for Multi-Use from Scotland and Germany. J. Environ. Manag. 2021, 279, 111762. [Google Scholar] [CrossRef] [PubMed]
- Cao, L.; Wang, W.; Yang, Y.; Yang, C.; Yuan, Z.; Xiong, S.; Diana, J. Environmental Impact of Aquaculture and Countermeasures to Aquaculture Pollution in China. Environ. Sci. Pollut. Res.-Int. 2007, 14, 452–462. [Google Scholar]
- Xu, Y.F.; Xu, H.; Liu, H.; Kan, Z.X.; Cui, M.C. Research on the Development Way of Deepsea Mariculture in China. Fish Mod. 2021, 48, 9–15. [Google Scholar]
- Jalón-Rojas, I.; Wang, X.H.; Fredj, E. A 3D Numerical Model to Track Marine Plastic Debris (TrackMPD): Sensitivity of Microplastic Trajectories and Fates to Particle Dynamical Properties and Physical Processes. Mar. Pollut. Bull. 2019, 141, 256–272. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Chen, Z.; Lee, K.; Owens, E.; Boufadel, M.C.; An, C.; Taylor, E. Decision Support Tools for Oil Spill Response (OSR-DSTs): Approaches, Challenges, and Future Research Perspectives. Mar. Pollut. Bull. 2021, 167, 112313. [Google Scholar] [CrossRef] [PubMed]
- Wang, N.; Cao, R.; Lv, X.; Shi, H. Research on the Transport of Typical Pollutants in the Yellow Sea with Flow and Wind Fields. J. Mar. Sci. Eng. 2023, 11, 1710. [Google Scholar] [CrossRef]
- Li, Y.; Chen, H.; Lv, X. Impact of Error in Ocean Dynamical Background, on the Transport of Underwater Spilled Oil. Ocean Model. 2018, 132, 30–45. [Google Scholar] [CrossRef]
- Jorda, G.; Comerma, E.; Bolaños, R.; Espino, M. Impact of Forcing Errors in the CAMCAT Oil Spill Forecasting System. A Sensitivity Study. J. Mar. Syst. 2007, 65, 134–157. [Google Scholar] [CrossRef]
- Wang, S.; Iskandarani, M.; Srinivasan, A.; Thacker, W.C.; Winokur, J.; Knio, O.M. Propagation of Uncertainty and Sensitivity Analysis in an Integral Oil-gas Plume Model. J. Geophys. Res. Oceans 2016, 121, 3488–3501. [Google Scholar] [CrossRef]
- Elliott, A.J.; Jones, B. The Need for Operational Forecasting during Oil Spill Response. Mar. Pollut. Bull. 2000, 40, 110–121. [Google Scholar] [CrossRef]
- Gonçalves, R.C.; Iskandarani, M.; Srinivasan, A.; Thacker, W.C.; Chassignet, E.; Knio, O.M. A Framework to Quantify Uncertainty in Simulations of Oil Transport in the Ocean. J. Geophys. Res. Oceans 2016, 121, 2058–2077. [Google Scholar] [CrossRef]
- Browne, M.A.; Galloway, T.S.; Thompson, R.C. Spatial Patterns of Plastic Debris along Estuarine Shorelines. Environ. Sci. Technol. 2010, 44, 3404–3409. [Google Scholar] [CrossRef]
- Van Sebille, E.; Aliani, S.; Law, K.L.; Maximenko, N.; Alsina, J.M.; Bagaev, A.; Bergmann, M.; Chapron, B.; Chubarenko, I.; Cózar, A.; et al. The Physical Oceanography of the Transport of Floating Marine Debris. Environ. Res. Lett. 2020, 15, 023003. [Google Scholar] [CrossRef]
- Huang, D.; Chen, H.; Shen, M.; Tao, J.; Chen, S.; Yin, L.; Zhou, W.; Wang, X.; Xiao, R.; Li, R. Recent Advances on the Transport of Microplastics/Nanoplastics in Abiotic and Biotic Compartments. J. Hazard. Mater. 2022, 438, 129515. [Google Scholar] [CrossRef] [PubMed]
- Uzun, P.; Farazande, S.; Guven, B. Mathematical Modeling of Microplastic Abundance, Distribution, and Transport in Water Environments: A Review. Chemosphere 2022, 288, 132517. [Google Scholar] [CrossRef] [PubMed]
- Strady, E.; Dang, T.H.; Dao, T.D.; Dinh, H.N.; Do, T.T.D.; Duong, T.N.; Duong, T.T.; Hoang, D.A.; Kieu-Le, T.C.; Le, T.P.Q. Baseline Assessment of Microplastic Concentrations in Marine and Freshwater Environments of a Developing Southeast Asian Country, Viet Nam. Mar. Pollut. Bull. 2021, 162, 111870. [Google Scholar] [CrossRef] [PubMed]
- Galeao, A.C.; Almeida, R.C.; Malta, S.M.C.; Loula, A.F.D. Finite Element Analysis of Convection Dominated Reaction–Diffusion Problems. Appl. Numer. Math. 2004, 48, 205–222. [Google Scholar] [CrossRef]
- Saadeh, R. Numerical Solutions of Fractional Convection-Diffusion Equation Using Finite-Difference and Finite-Volume Schemes. J. Math. Comput. Sci. 2021, 11, 7872–7891. [Google Scholar]
- Aiyer, A.K.; Yang, D.; Chamecki, M.; Meneveau, C. A Population Balance Model for Large Eddy Simulation of Polydisperse Droplet Evolution. J. Fluid Mech. 2019, 878, 700–739. [Google Scholar] [CrossRef]
- Cao, R.; Chen, H.; Li, H.; Fu, H.; Wang, Y.; Bao, M.; Tuo, W.; Lv, X. A Mesoscale Assessment of Sinking Oil during Dispersant Treatment. Ocean Eng. 2022, 263, 112341. [Google Scholar] [CrossRef]
- Waldschläger, K.; Schüttrumpf, H. Effects of Particle Properties on the Settling and Rise Velocities of Microplastics in Freshwater under Laboratory Conditions. Environ. Sci. Technol. 2019, 53, 1958–1966. [Google Scholar] [CrossRef] [PubMed]
- Stolzenbach, K.D.; Madsen, O.S.; Adams, E.E.; Pollack, A.M.; Cooper, C. A Review and Evaluation of Basic Techniques for Predicting the Behavior of Surface Oil Slicks; Massachusetts Institute of Technology Sea Grant Program: Cambridge, MA, USA, 1977. [Google Scholar]
- Samuels, W.B.; Huang, N.E.; Amstutz, D.E. An Oilspill Trajectory Analysis Model with a Variable Wind Deflection Angle. Ocean Eng. 1982, 9, 347–360. [Google Scholar] [CrossRef]
- Wang, J.; Shen, Y. Modeling Oil Spills Transportation in Seas Based on Unstructured Grid, Finite-Volume, Wave-Ocean Model. Ocean Model. 2010, 35, 332–344. [Google Scholar] [CrossRef]
- Pan, Q.; Yu, H.; Daling, P.S.; Zhang, Y.; Reed, M.; Wang, Z.; Li, Y.; Wang, X.; Wu, L.; Zhang, Z. Fate and Behavior of Sanchi Oil Spill Transported by the Kuroshio during January–February 2018. Mar. Pollut. Bull. 2020, 152, 110917. [Google Scholar] [CrossRef] [PubMed]
- Boufadel, M.; Liu, R.; Zhao, L.; Lu, Y.; Özgökmen, T.; Nedwed, T.; Lee, K. Transport of Oil Droplets in the Upper Ocean: Impact of the Eddy Diffusivity. J. Geophys. Res. Oceans 2020, 125, e2019JC015727. [Google Scholar] [CrossRef]
- Bandara, U.C.; Yapa, P.D. Bubble Sizes, Breakup, and Coalescence in Deepwater Gas/Oil Plumes. J. Hydraul. Eng. 2011, 137, 729–738. [Google Scholar] [CrossRef]
- Rong, Z.; Li, M. Tidal Effects on the Bulge Region of Changjiang River Plume. Estuar. Coast. Shelf Sci. 2012, 97, 149–160. [Google Scholar] [CrossRef]
- Egbert, G.D.; Bennett, A.F.; Foreman, M.G.G. TOPEX/POSEIDON Tides Estimated Using a Global Inverse Model. J. Geophys. Res. Oceans 1994, 99, 24821–24852. [Google Scholar] [CrossRef]
- Cao, R.; Chen, H.; Rong, Z.; Lv, X. Impact of Ocean Waves on Transport of Underwater Spilled Oil in the Bohai Sea. Mar. Pollut. Bull. 2021, 171, 112702. [Google Scholar] [CrossRef] [PubMed]
- Haidvogel, D.B.; Blanton, J.; Kindle, J.C.; Lynch, D.R. Coastal Ocean Modeling: Processes and Real-Time Systems. Oceanography 2000, 13, 35–46. [Google Scholar] [CrossRef]
- Shchepetkin, A.F.; McWilliams, J.C. The Regional Oceanic Modeling System (ROMS): A Split-Explicit, Free-Surface, Topography-Following-Coordinate Oceanic Model. Ocean. Model. 2005, 9, 347–404. [Google Scholar] [CrossRef]
- Egbert, G.D.; Erofeeva, S.Y. Efficient Inverse Modeling of Barotropic Ocean Tides. J. Atmos. Ocean Technol. 2002, 19, 183–204. [Google Scholar] [CrossRef]
- Chapman, D.C. Numerical Treatment of Cross-Shelf Open Boundaries in a Barotropic Coastal Ocean Model. J. Phys. Oceanogr. 1985, 15, 1060–1075. [Google Scholar] [CrossRef]
- Flather, R.A. A Tidal Model of the Northwest European Continental Shelf. Mem. Soc. Roy. Sci. Liege 1976, 10, 141–164. [Google Scholar]
- Orlanski, I. A Simple Boundary Condition for Unbounded Hyperbolic Flows. J. Comput. Phys. 1976, 21, 251–269. [Google Scholar] [CrossRef]
- Khater, E.-S.G.; Bahnasawy, A.H.; Ali, S.A. Physical and Mechanical Properties of Fish Feed Pellets. J. Food Process Technol. 2014, 5, 1. [Google Scholar]
- Wang, J.Z.; Wang, Y.; Jiang, P. The Study and Application of a Novel Hybrid Forecasting Model—A Case Study of Wind Speed Forecasting in China. Appl. Energy 2015, 143, 472–488. [Google Scholar] [CrossRef]
- Wang, D.; Luo, Z.; Mu, L. Numerical Study on the Influence of Model Uncertainties on the Transport of Underwater Spilled Oil. Int. J. Environ. Res. Public Health 2022, 19, 9274. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, W.; Shan, X.; Chen, J.; Weng, H.; Yang, T.; Wang, H. Growth Characteristics of Cage-Cultured Large Yellow Croaker Larimichthys Crocea. Aquac. Rep. 2020, 16, 100242. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Parameters | Value |
|---|---|
| Release depth | 0 m |
| Release duration | 15 days |
| Simulation duration | 15 days |
| Particle quantity | 100,000 |
| Particle density | 500 kg/m3 |
| No. | Maximum Random Error in Current | Maximum Random Error in Wind | Position |
|---|---|---|---|
| 1 | 0 | 0 | K0 |
| 2 | 5% | 0 | K0 |
| 3 | 15% | 0 | K0 |
| 4 | 25% | 0 | K0 |
| 5 | 35% | 0 | K0 |
| 6 | 0 | 5% | K0 |
| 7 | 0 | 15% | K0 |
| 8 | 0 | 25% | K0 |
| 9 | 0 | 35% | K0 |
| 10 | 0 | 0 | K1 |
| 11 | 0 | 0 | K2 |
| 12 | 0 | 0 | K3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, N.; Zhao, Z.; Cao, R.; Lv, X.; Shi, H. The Effect of Model Input Uncertainty on the Simulation of Typical Pollutant Transport in the Coastal Waters of China. J. Mar. Sci. Eng. 2024, 12, 1196. https://doi.org/10.3390/jmse12071196
Wang N, Zhao Z, Cao R, Lv X, Shi H. The Effect of Model Input Uncertainty on the Simulation of Typical Pollutant Transport in the Coastal Waters of China. Journal of Marine Science and Engineering. 2024; 12(7):1196. https://doi.org/10.3390/jmse12071196
Chicago/Turabian StyleWang, Nan, Zihan Zhao, Ruichen Cao, Xianqing Lv, and Honghua Shi. 2024. "The Effect of Model Input Uncertainty on the Simulation of Typical Pollutant Transport in the Coastal Waters of China" Journal of Marine Science and Engineering 12, no. 7: 1196. https://doi.org/10.3390/jmse12071196