
Ship Emission Measurements Using Multirotor Unmanned Aerial Vehicles: Review


Abstract
:1. Introduction
2. Results
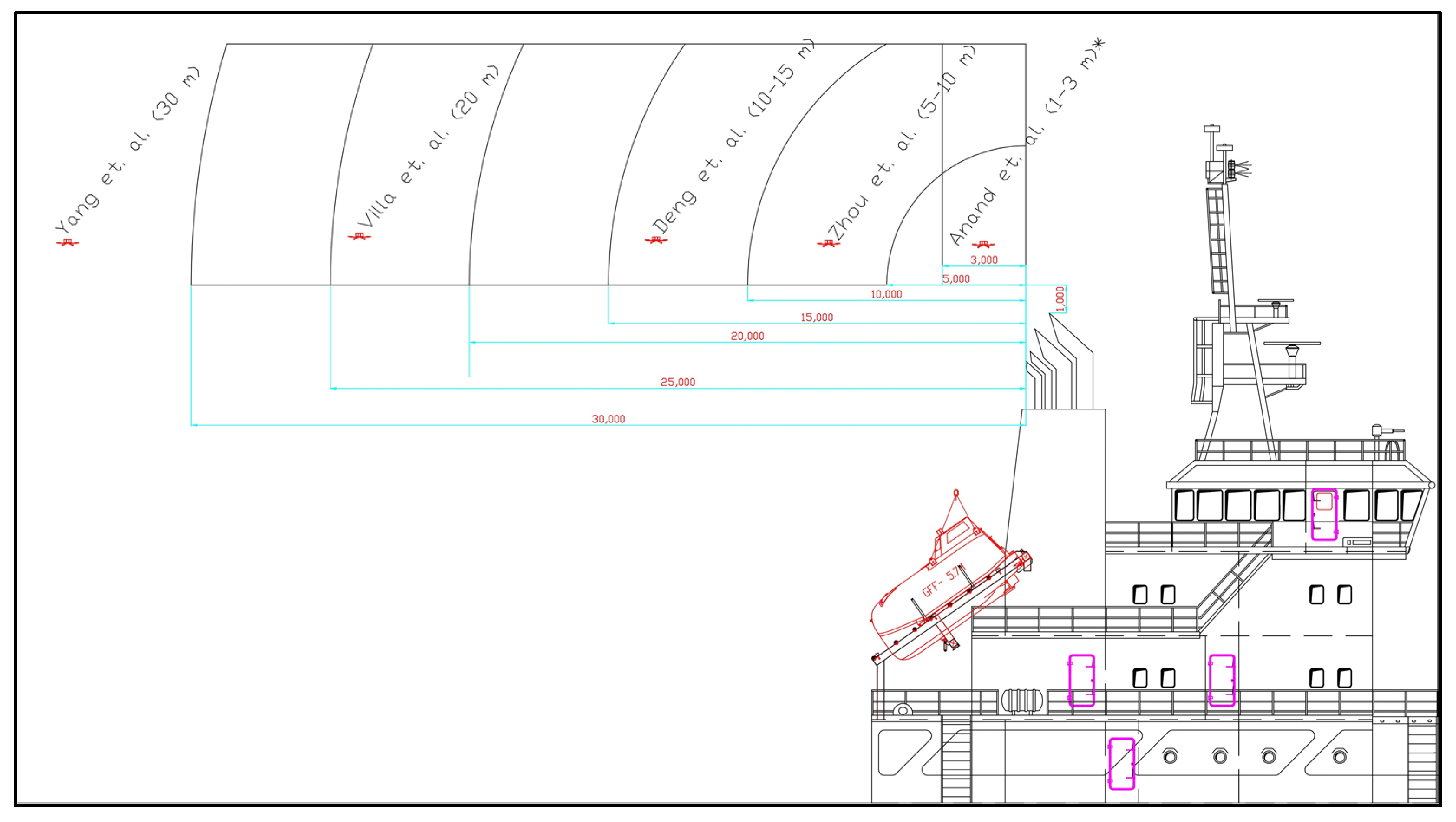
2.1. Measurement Distance from Ship
2.2. Duration of Measurements
2.3. Measurement Accuracy, Reliability and Uncertainties
2.4. Influence of Airflow on UAV-Based Exhaust Gas Measurements

{kind=link}
{kind=link}
| Author, Year | Mount Location | Sensor Model | Sensor Measuring Range | Detection Accuracy |
|---|---|---|---|---|
| Fan Zhou et al., 25 November 2019 [37] | Under UAV, probe outside UAV | CO2 sensor NDIR method | 0–5000 ppm | ±50 ppm. |
| SO2 sensor EC method. | 0–5 ppm | ±0.25 ppm | ||
| Jianbo Hu et al., 2022 [30], Mengtao Deng et al., 2022 [41], Mengtao Deng et al., 2022 [47] | Under UAV, no probe | SO2 SGA-700B-SO2, CO2: SGA-700B-CO2. | 0–1 ppm 0–2000 ppm | ±10 ppb. ±5 ppm |
| Fan Zhou et al., 2019 [28] | Under UAV, probe outside UAV | SO2 sensor EC method | 0–100 ppm | ±5 ppm |
| NO2 sensor EC method | ||||
| Fan Zhou et al., 2020 [39] | Under UAV, probe outside UAV | SO2 sensor EC method. | 0–10 ppm | ±3% |
| CO2 sensor NDIR method. | 0–10,000 ppm | ±3% | ||
| Sudum Esaenwi et al., 2023 [40] | On UAV, no probe | MQ131 Ozone sensor. [76] | 10–1000 ppm [77] | not provided. |
| Xin Peng et al., 2021 [42] | Under UAV, probe outside UAV | CO2 not provided | 0–2000 ppm | not provided. |
| SO2 sensor EC method | 0–200 ppm | not provided. | ||
| Tommaso F. Villa et al., 2019 [29] | Under UAV, probe outside UAV | CO2 sensor NDIR method. | 0–5000 ppm | ±50 ppm |
| Fan Zhou et al., 2019 [45] | Under UAV, probe outside UAV | CO2 sensor NDIR method. | 0–5000 ppm | ±50 ppm |
| SO2 sensor EC. | 0–5 ppm | ±0.25 ppm | ||
| Haiwen Yuan et al., 2020 [46] | Under UAV, no probe | NO, NO2, SO2 | 0–1000 | not provided. |
| CO2 sensor | 0–2000 (unit: mg/m3). | not provided. | ||
| Shiyi Yang et al. [49] | On UAVm with probe under UAV | SO2, sensor EC, CO2 sensor NDIR | - | - |
| Abhishek Anand et al. [50] | On UAVm with probe under UAV | SO2, NO, CO sensor EC, CO2 sensor NDIR | - | - |
2.5. UAV Characteristics
2.6. UAV Autonomy and Scheduling
2.7. Legal Regulation in the EU
- BVLOS: beyond visual line of sight.
- MTOM > 25 kg: when using a drone with a maximum takeoff mass greater than 25 kg.
- Altitude: flying higher than 120 m above ground level.
- Dropping Materials: when dropping any material.
- Urban Operations: operating a drone in an urban environment with an MTOM > 4 kg or without a class identification label.
- holding an EU drone license when flying a drone above 249 g;
2.8. The Future Work and Trends
3. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, S.; Wang, X.; Han, Y.; Wang, X.; Jiang, H.; Duan, J.; Hua, R.; Zhang, Z. Decarbonizing in Maritime Transportation: Challenges and Opportunities. J. Transp. Technol. 2023, 13, 301–325. [Google Scholar] [CrossRef]
- Irvana, R.; Abdullah, K.; Sadirsan, E.S. Transformation of Monohull to Catamaran Hybrid (Diesel-PV) Fishing Vessels to Reduce Exhaust Emissions. Int. J. Mar. Eng. Innov. Res. 2022, 7, 261–269. [Google Scholar] [CrossRef]
- Liu, X. The Supervision and Multi-Sectoral Guarantee Mechanism of the Global Marine Sulphur Limit—Assessment from Chinese Shipping Industry. Front. Mar. Sci. 2022, 9, 1028388. [Google Scholar] [CrossRef]
- Ramacher, M.O.P.; Karl, M.; Bieser, J.; Jalkanen, J.-P.; Johansson, L. Urban Population Exposure to NOx Emissions from Local Shipping in Three Baltic Sea Harbour Cities—A Generic Approach. Atmos. Chem. Phys. Discuss. 2019, 19, 9153–9179. [Google Scholar] [CrossRef]
- Kuittinen, N.; Jalkanen, J.-P.; Alanen, J.; Ntziachristos, L.; Hannuniemi, H.; Johansson, L.; Karjalainen, P.; Saukko, E.; Isotalo, M.; Aakko-Saksa, P.; et al. Shipping Remains a Globally Significant Source of Anthropogenic PN Emissions Even after 2020 Sulfur Regulation. Environ. Sci Technol 2021, 55, 129–138. [Google Scholar] [CrossRef]
- European Parliament Brussels. 17.9.2020 COM(2020) 562 Final Communication from the Commission to the European Parliament, the Council, the European Economic and Social Committee and the Committee of the Regions Stepping up Europe’s 2030 Climate Ambition Investing in a Climat; European Parliament: Brussels, Belgium, 2020. [Google Scholar]
- IMO. Annex 11 Resolution Mepc.304(72) (Adopted on 13 April 2018) Initial IMO Strategy on Reduction of GHG Emissions from Ships. 2018. Available online: https://wwwcdn.imo.org/localresources/en/KnowledgeCentre/IndexofIMOResolutions/MEPCDocuments/MEPC.304(72).pdf (accessed on 11 June 2024).
- Marine Environment Protection Committee IMO. Available online: https://www.imo.org/en/MediaCentre/MeetingSummaries/Pages/MEPC-80.aspx (accessed on 26 April 2024).
- Sustainable Maritime Fuels “Fit for 55” Package: The FuelEU Maritime Proposal. 2023. Available online: https://www.europarl.europa.eu/thinktank/en/document/EPRS_BRI(2021)698808 (accessed on 5 March 2024).
- Mallouppas, G.; Yfantis, E.A. Decarbonization in Shipping Industry: A Review of Research, Technology Development, and Innovation Proposals. J. Mar. Sci. Eng. 2021, 9, 415. [Google Scholar] [CrossRef]
- Mukherjee, A.; Bruijnincx, P.C.; Junginger, M. A Perspective on Biofuels Use and CCS for GHG Mitigation in the Marine Sector. iScience 2020, 23, 101758. [Google Scholar] [CrossRef]
- Speizer, S.; Fuhrman, J.; Aldrete, L.; George, M.; Kyle, P.; Monteith, S.; McJeon, H. A Zero-Emissions Global Transportation Sector: Advanced Technologies and Their Energy and Environmental Implications. Preprint 2023. [Google Scholar] [CrossRef]
- De, A.; Choudhary, A.; Tiwari, M.K. Multiobjective Approach for Sustainable Ship Routing and Scheduling with Draft Restrictions. IEEE Trans. Eng. Manag. 2019, 66, 35–51. [Google Scholar] [CrossRef]
- Chen, X.; Lv, S.; Shang, W.; Wu, H.; Xian, J.; Song, C. Ship Energy Consumption Analysis and Carbon Emission Exploitation via Spatial-Temporal Maritime Data. Appl. Energy 2024, 360, 122886. [Google Scholar] [CrossRef]
- Liu, Z.; Lu, X.; Feng, J.; Fan, Q.; Zhang, Y.; Yang, X. Influence of Ship Emissions on Urban Air Quality: A Comprehensive Study Using Highly Time-Resolved Online Measurements and Numerical Simulation in Shanghai. Environ. Sci. Technol. 2017, 51, 202–211. [Google Scholar] [CrossRef]
- Mocerino, L.; Murena, F.; Quaranta, F.; Toscano, D. A Methodology for the Design of an Effective Air Quality Monitoring Network in Port Areas. Sci. Rep. 2020, 10, 300. [Google Scholar] [CrossRef]
- European Maritime Safety Agency Sulphur Inspection Guidance Directive (EU) 2016/802; European Commission: Brussels, Belgium, 2016.
- IMO. IMO2020 Fuel Oil Sulphur Limit-Cleaner Air, Healthier Planet. Available online: https://www.imo.org/en/MediaCentre/PressBriefings/Pages/02-IMO-2020.aspx (accessed on 8 May 2024).
- IMO. Annex 3 Resolution mepc.326(75) (Adopted on 20 November 2020) 2020 Guidelines for Monitoring the Worldwide Average Sulphur Content of Fuel Oils Supplied for Use on Board Ships. Available online: https://wwwcdn.imo.org/localresources/en/KnowledgeCentre/IndexofIMOResolutions/MEPCDocuments/MEPC.326(75).pdf (accessed on 5 March 2024).
- Li, X.; Li, K.; Ji, Q.; Shen, F.; Wu, Q.; Chen, Q.; Luo, L.; Bian, X.; Chen, W.; Lou, D. Investigation of Sniffer Technique on Remote Measurement of Ship Emissions: A Case Study in Shanghai, China. PLoS ONE 2022, 17, e0274236. [Google Scholar] [CrossRef]
- TELOPS. Remote Quantification of Sulfur Content in Fuel from SO2 Quantification from Ship Exhaust Plume. 2020. Available online: https://www.telops.com/wp-content/uploads/2021/11/remotequantificationofsulfurcontentinfuel_appnote.pdf (accessed on 24 May 2024).
- Peng, X.; Li, T.; Wu, L.; Huang, L.; Wen, Y.; Zhou, C.; Zhang, F.; Han, T.; Li, J. Optimal Site Selection for the Remote-Monitoring Sulfur Content of Ship Fuels in Ports. Ocean Coast. Manag. 2022, 225, 106211. [Google Scholar] [CrossRef]
- Zhao, T.; Chen, M.; Lee, H. A Study on the Framework for Estimating Ship Air Pollutant Emissions—Focusing on Ports of South Korea. Atmosphere 2022, 13, 1141. [Google Scholar] [CrossRef]
- Villa, T.; Salimi, F.; Morton, K.; Morawska, L.; Gonzalez, F. Development and Validation of a UAV Based System for Air Pollution Measurements. Sensors 2016, 16, 2202. [Google Scholar] [CrossRef]
- Valavanis, K.P. (Ed.) Advances in Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2007; ISBN 978-1-4020-6113-4. [Google Scholar]
- Motlagh, N.H.; Kortoci, P.; Su, X.; Loven, L.; Hoel, H.K.; Haugsvaer, S.B.; Srivastava, V.; Gulbrandsen, C.F.; Nurmi, P.; Tarkoma, S. Unmanned Aerial Vehicles for Air Pollution Monitoring: A Survey. IEEE Internet Things J. 2023, 10, 21687–21704. [Google Scholar] [CrossRef]
- Zhou, F.; Zhu, L.; Zou, J.; Bai, X. Tracking and Measuring Plumes from Sailing Ships Using an Unmanned Aerial Vehicle. IET Intell. Transp. Syst. 2023, 17, 285–294. [Google Scholar] [CrossRef]
- Zhou, F.; Gu, J.; Chen, W.; Ni, X. Measurement of SO2 and NO2 in Ship Plumes Using Rotary Unmanned Aerial System. Atmosphere 2019, 10, 657. [Google Scholar] [CrossRef]
- Villa, T.F.; Brown, R.A.; Jayaratne, E.R.; Gonzalez, L.F.; Morawska, L.; Ristovski, Z.D. Characterization of the Particle Emission from a Ship Operating at Sea Using an Unmanned Aerial Vehicle. Atmos. Meas. Tech. 2019, 12, 691–702. [Google Scholar] [CrossRef]
- Hu, J.; Deng, M.; Peng, S.; Qi, Z. UAV Inspection of Compliance of Fuel Sulfur Content of Sailing Ships in the Pearl River Delta, China. Atmosphere 2022, 13, 1894. [Google Scholar] [CrossRef]
- Cooper, D.A. Exhaust Emissions from Ships at Berth. Atmos. Environ. 2003, 37, 3817–3830. [Google Scholar] [CrossRef]
- Marpol Marpol Annex VI Fuel Sulphur Content Limitation. Available online: https://www.imo.org/en/MediaCentre/PressBriefings/Pages/10-MEPC-74-sulphur-2020.aspx (accessed on 19 March 2024).
- IMO Global Sulphur Regulations/ECA/SECA Zones. Available online: https://www.maritimeoptima.com/insights/global-sulphur-regulations-eca-seca-zones (accessed on 2 July 2024).
- ABS Advisory on NOx Tier III Compliance. Available online: https://ww2.eagle.org/content/dam/eagle/advisories-and-debriefs/ABS-Advisory-on-NOx-Tier-III-Compliance-20068.pdf (accessed on 20 March 2024).
- Rapalis, P.; Šilas, G.; Žaglinskis, J. Ship Air Pollution Estimation by AIS Data: Case Port of Klaipeda. J. Mar. Sci. Eng. 2022, 10, 1950. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, Q.; Zhang, Y.; Lv, Z.; Wang, Y.; Wu, L.; Feng, X.; Mao, H. An AIS-Based Emission Inventory and the Impact on Air Quality in Tianjin Port Based on Localized Emission Factors. Sci. Total Environ. 2021, 783, 146869. [Google Scholar] [CrossRef]
- Zhou, F.; Pan, S.; Chen, W.; Ni, X.; An, B. Monitoring of Compliance with Fuel Sulfur Content Regulations through Unmanned Aerial Vehicle (UAV) Measurements of Ship Emissions. Atmos. Meas. Tech. 2019, 12, 6113–6124. [Google Scholar] [CrossRef]
- Purway Prophet AM Air Monitoring Module 2023, 1–25. Available online: https://purway-innovate.com/ (accessed on 2 June 2024).
- Zhou, F.; Hou, L.; Zhong, R.; Chen, W.; Ni, X.; Pan, S.; Zhao, M.; An, B. Monitoring the Compliance of Sailing Ships with Fuel Sulfur Content Regulations Using Unmanned Aerial Vehicle (UAV) Measurements of Ship Emissions in Open Water. Atmos. Meas. Tech. 2020, 13, 4899–4909. [Google Scholar] [CrossRef]
- Esaenwi, S. Development of Smart UAV (Drone) Ozone (O3) Monitoring System in Port Harcourt, Rivers State, Nigeria. World J. Adv. Res. Rev. 2023, 17, 558–568. [Google Scholar] [CrossRef]
- Deng, M.; Peng, S.; Xie, X.; Jiang, Z.; Hu, J.; Qi, Z.; Sun, J. SO2 Compliance Monitoring and Emission Characteristics Analysis of Navigating Ships: A Case Study of Shanghai Waters in Emission Control Areas, China. Atmos. Pollut. Res. 2022, 13, 101560. [Google Scholar] [CrossRef]
- Peng, X.; Huang, L.; Wu, L.; Zhou, C.; Wen, Y.; Chen, H.; Xiao, C. Remote Detection Sulfur Content in Fuel Oil Used by Ships in Emission Control Areas: A Case Study of the Yantian Model in Shenzhen. Ocean. Eng. 2021, 237, 109652. [Google Scholar] [CrossRef]
- Haugen, M.J.; Gkantonas, S.; Helou, I.E.; Pathania, R.; Mastorakos, E.; Boies, A.M. Measurements and Modelling of the Three-Dimensional near-Field Dispersion of Particulate Matter Emitted from Passenger Ships in a Port Environment. Atmos. Environ. 2022, 290, 119384. [Google Scholar] [CrossRef]
- Hu, Z.H.; Liu, T.C.; Tian, X.D. A Drone Routing Problem for Ship Emission Detection Considering Simultaneous Movements. Atmosphere 2023, 14, 373. [Google Scholar] [CrossRef]
- Zhou, F.; Pan, S.; Chen, W.; Ni, X.; An, B. High-Precision Monitoring of Compliance with Fuel Sulfur Content through UAV Measurements of Ship Emissions. Atmos. Meas. Tech. Discuss. 2019, 12, 6113–6124. [Google Scholar] [CrossRef]
- Yuan, H.; Xiao, C.; Wang, Y.; Peng, X.; Wen, Y.; Li, Q. Maritime Vessel Emission Monitoring by an UAV Gas Sensor System. Ocean Eng. 2020, 218, 108206. [Google Scholar] [CrossRef]
- Deng, M.; Peng, S.; Xie, X.; Jiang, Z.; Hu, J.; Qi, Z. A Diffused Mini-Sniffing Sensor for Monitoring SO2 Emissions Compliance of Navigating Ships. Sensors 2022, 22, 5198. [Google Scholar] [CrossRef]
- Bao, X.; Hu, Z.; Huang, Y. Routing a Fleet of Drones from a Base Station for Emission Detection of Moving Ships by Genetic Algorithm. J. Mar. Sci. Eng. 2024, 12, 891. [Google Scholar] [CrossRef]
- Yang, S.; Ghadikolaei, M.A.; Gali, N.K.; Xu, Z.; Chu, M.; Qin, X.; Ning, Z. Evaluating Methods for Marine Fuel Sulfur Content Using Microsensor Sniffing Systems on Ocean-Going Vessels. Sci. Total Environ. 2024, 942, 173765. [Google Scholar] [CrossRef]
- Anand, A.; Wei, P.; Gali, N.K.; Sun, L.; Yang, F.; Westerdahl, D.; Zhang, Q.; Deng, Z.; Wang, Y.; Liu, D.; et al. Protocol Development for Real-Time Ship Fuel Sulfur Content Determination Using Drone Based Plume Sniffing Microsensor System. Sci. Total Environ. 2020, 744, 140885. [Google Scholar] [CrossRef]
- Shen, L.; Hou, Y.; Yang, Q.; Lv, M.; Dong, J.X.; Yang, Z.; Li, D. Synergistic Path Planning for Ship-Deployed Multiple UAVs to Monitor Vessel Pollution in Ports. Transp. Res. D Transp. Environ. 2022, 110, 103415. [Google Scholar] [CrossRef]
- Hu, Z.H.; Liu, T.C.; Tian, X.D. Scheduling Drones for Ship Emission Detection from Multiple Stations. Drones 2023, 7, 158. [Google Scholar] [CrossRef]
- Karachalios, T.; Moschos, P.; Orphanoudakis, T. Maritime Emission Monitoring: Development and Testing of a UAV-Based Real-Time Wind Sensing Mission Planner Module. Sensors 2024, 24, 950. [Google Scholar] [CrossRef]
- Pikun, W.; Ling, W.; Jiangxin, Q.; Jiashuai, D. Unmanned Aerial Vehicles Object Detection Based on Image Haze Removal under Sea Fog Conditions. IET Image Process 2022, 16, 2709–2721. [Google Scholar] [CrossRef]
- Vasilopoulos, E.; Vosinakis, G.; Krommyda, M.; Karagiannidis, L.; Ouzounoglou, E.; Amditis, A. A Comparative Study of Autonomous Object Detection Algorithms in the Maritime Environment Using a UAV Platform. Computation 2022, 10, 42. [Google Scholar] [CrossRef]
- Haugen, M.J.; Gkantonas, S.; Helou, I.E.; Pathania, R.; Mastorakos, E.; Boies, A.M. Particle Measurements from In-Use Maritime Traffic Using an Unmanned Aerial Vehicle in Rafina, Greece. Transp. Res. Procedia 2023, 72, 2094–2100. [Google Scholar] [CrossRef]
- Yan, M.; Yuan, H.; Xu, J.; Yu, Y.; Jin, L. Task Allocation and Route Planning of Multiple UAVs in a Marine Environment Based on an Improved Particle Swarm Optimization Algorithm. EURASIP J. Adv. Signal Process. 2021, 2021, 94. [Google Scholar] [CrossRef]
- Shen, L.; Wang, Y.; Liu, K.; Yang, Z.; Shi, X.; Yang, X.; Jing, K. Synergistic Path Planning of Multi-UAVs for Air Pollution Detection of Ships in Ports. Transp. Res. E Logist. Transp. Rev. 2020, 144, 102128. [Google Scholar] [CrossRef]
- Hamamatsu CO2 Measurement. Principle of CO2 measurement with NDIR method 2023, 1–4. Available online: https://www.hamamatsu.com/content/dam/hamamatsu-photonics/sites/documents/99_SALES_LIBRARY/ssd/an_co2_koth0026e.pdf (accessed on 2 July 2024).
- Han, P.; Mei, H.; Liu, D.; Zeng, N.; Tang, X.; Wang, Y.; Pan, Y. Calibrations of Low-Cost Air Pollution Monitoring Sensors for CO, NO2, O3, and SO2. Sensors 2021, 21, 256. [Google Scholar] [CrossRef] [PubMed]
- Arroyo, P.; Gómez-Suárez, J.; Suárez, J.I.; Lozano, J. Low-Cost Air Quality Measurement System Based on Electrochemical and PM Sensors with Cloud Connection. Sensors 2021, 21, 6228. [Google Scholar] [CrossRef] [PubMed]
- Xia, J.; Wang, K.; Wang, S. Drone Scheduling to Monitor Vessels in Emission Control Areas. Transp. Res. Part B Methodol. 2019, 119, 174–196. [Google Scholar] [CrossRef]
- Chen, J.; Wang, S.; Qu, X.; Yi, W. A Modelling Framework of Drone Deployment for Monitoring Air Pollution from Ships. In Intelligent Interactive Multimedia Systems and Services; Springer: Berlin/Heidelberg, Germany, 2019; pp. 281–288. [Google Scholar]
- Zheng, T.; Li, S.; Xiao, Z.J.; Zhang, L. The Optimization Model of UAV Shooting Flight Routes 2023. Preprint 2023. [Google Scholar] [CrossRef]
- Jones, L.R.; Elmore, J.A.; Krishnan, B.S.; Samiappan, S.; Evans, K.O.; Pfeiffer, M.B.; Blackwell, B.F.; Iglay, R.B. Controllable Factors Affecting Accuracy and Precision of Human Identification of Animals from Drone Imagery. Ecosphere 2023, 14, e4657. [Google Scholar] [CrossRef]
- Yıldız, S.; Kıvrak, S.; Arslan, G. Using Drone Technologies for Construction Project Management: A Narrative Review. J. Constr. Eng. Manag. Innov. 2021, 4, 229–244. [Google Scholar] [CrossRef]
- Alvarado, M.; Gonzalez, F.; Erskine, P.; Cliff, D.; Heuff, D. A Methodology to Monitor Airborne PM10 Dust Particles Using a Small Unmanned Aerial Vehicle. Sensors 2017, 17, 343. [Google Scholar] [CrossRef]
- Samad, A.; Florez, D.A.; Chourdakis, I.; Vogt, U. Concept of Using an Unmanned Aerial Vehicle (UAV) for 3D Investigation of Air Quality in the Atmosphere—Example of Measurements near a Roadside. Atmosphere 2022, 13, 663. [Google Scholar] [CrossRef]
- Szczurek, A.; Gonstał, D.; Maciejewska, M. The Gas Sensing Drone with the Lowered and Lifted Measurement Platform. Sensors 2023, 23, 1253. [Google Scholar] [CrossRef] [PubMed]
- Cocuzza, S.; Doria, A. Modeling and Identification of Vibrations in a UAV for Aerial Manipulation. In Advances in Italian Mechanism Science: Proceedings of the 3rd International Conference of IFToMM, Naples, Italy, 9–11 September 2020; Springer International Publishing: Cham, Switzerland, 2021; pp. 182–190. [Google Scholar]
- Al-Haddad, L.; Jaber, A.; Neranon, P.; Al-Haddad, S. Investigation of Frequency-Domain-Based Vibration Signal Analysis for UAV Unbalance Fault Classification. Eng. Technol. J. 2023, 41, 915–923. [Google Scholar] [CrossRef]
- Park, S.; Heo, J.; Yu, B.S.; Rhee, S.H. Computational Analysis of Ship’s Exhaust-Gas Flow and Its Application for Antenna Location. Appl. Therm. Eng. 2011, 31, 1689–1702. [Google Scholar] [CrossRef]
- Zhu, Y.; Wan, Q.; Hou, Q.; Feng, Y.; Yu, J.; Shi, J.; Xia, C. Analysis of Diffusion Characteristics and Influencing Factors of Particulate Matter in Ship Exhaust Plume in Arctic Environment Based on CFD. Atmosphere 2024, 15, 580. [Google Scholar] [CrossRef]
- Gan, L.; Lu, T.; Shu, Y. Diffusion and Superposition of Ship Exhaust Gas in Port Area Based on Gaussian Puff Model: A Case Study on Shenzhen Port. J. Mar. Sci. Eng. 2023, 11, 330. [Google Scholar] [CrossRef]
- Park, S.; Yang, J.; Rhee, S.H. Parametric Study on Ship’s Exhaust-Gas Behavior Using Computational Fluid Dynamics. Eng. Appl. Comput. Fluid Mech. 2017, 11, 159–171. [Google Scholar] [CrossRef]
- Winsen MQ131 Ozone Gas Sensor. Available online: https://www.winsen-sensor.com/product/mq131-h.html?searchid=5035 (accessed on 13 March 2024).
- DJI Drone Matrice 600 PRO Specifications. Available online: https://www.dji.com/lt/matrice600-pro/info (accessed on 7 March 2024).
- ALLTECH Drone KWT-X6L Specifications. Available online: https://pdf.directindustry.com/pdf/shenzhen-keweitai-enterprise-development-co-ltd/kwt-x6l-2d-surveying-mapping-details/161742-927625.html (accessed on 7 March 2024).
- DJI Drone Matrice 600 Specifications. Available online: https://www.dji.com/lt/matrice600/info (accessed on 7 March 2024).
- DJI Drone Matrice Rtk 210 Specifications. 2023. Available online: https://www.dji.com/lt/products/compare-m200-series (accessed on 7 March 2024).
- DJI Drone Phantom 4 Pro V2.0 Specifications. Available online: https://www.dji.com/lt/phantom-4-pro-v2/specs (accessed on 7 March 2024).
- AEROMON BH-12 Multi-Gas Detector. Available online: https://aeromon.io/ (accessed on 18 March 2024).
- DroneBase AirMon-10 Gas Detector. Available online: https://www.dronebase.it/en/dji-m300-multigas-air-monitor-system/ (accessed on 18 March 2024).
- Purway Prophet AM Air Monitoring Module. Available online: https://m.xcopter.com/product/dji/payload/purway/manual/Prophet_AM_User_Manual_V1.4.pdf (accessed on 18 March 2024).
- Scentroid DR2000 Multi-Gas Detector. Available online: https://scentroid.com/wp-content/uploads/2020/08/DR2000-Product-Brochure.pdf (accessed on 18 March 2024).
- Scentroid DR1000 Multi-Gas Detector. Available online: https://www.scentroid.com/wp-content/uploads/2019/12/WEB-DR1000-Product-Brochure.pdf (accessed on 18 March 2024).
- TELEDYNE FLIR Muve C360 Multi-Gas Detector. Available online: https://bezpilotne.cz/wp-content/uploads/2021/04/payload-collectionV1.2.pdf (accessed on 18 March 2024).
- Kazantsev, P.A.; Sadakov, V.A.; Chupakov, M.V. Maritime Vessels Real-Time Tracking-by-Detection in UAV Videos. Indian. J. Sci. Technol. 2016, 9, 1–9. [Google Scholar] [CrossRef]
- Garcia-Aunon, P.; Santos Peñas, M.; de la Cruz García, J.M. A New UAV Ship-Tracking Algorithm; Elsevier B.V.: Amsterdam, The Netherlands, 2017; Volume 50, pp. 13090–13095. [Google Scholar]
- DJI Drone Matrice 600 PRO Specifications 2023. Available online: https://www.dji.com/lt/support/product/matrice600-pro (accessed on 2 June 2024).
- DJI DJI Agriculture. Available online: https://ag.dji.com/t50 (accessed on 1 July 2024).
- DJI DJI AVATA 2. Available online: https://www.dji.com/lt/avata-2 (accessed on 1 July 2024).
- EASA. EASA Drone Open Category-Applicable Requirements to Fly from the 1st of January 2024. Available online: https://www.easa.europa.eu/en/document-library/general-publications/drone-open-category-applicable-requirements-fly-1st-january (accessed on 29 June 2024).
- DroneClass EU Drone Laws. Available online: https://www.dronelicense.eu/blogs/popular/drone-laws-europe (accessed on 28 June 2024).
- EASA. EASA Specific Category-Civil Drones. Available online: https://www.easa.europa.eu/en/domains/civil-drones-rpas/specific-category-civil-drones (accessed on 29 June 2024).
- Guarnera, C. Blue Falcon Rerial. Available online: https://www.bluefalconaerial.com/ (accessed on 1 July 2024).
- Trappey, A.J.C.; Lin, G.-B.; Chen, H.-K.; Chen, M.-C. A Comprehensive Analysis of Global Patent Landscape for Recent R&D in Agricultural Drone Technologies. World Pat. Inf. 2023, 74, 102216. [Google Scholar] [CrossRef]
- Kownacki, C. Artificial Potential Field Based Trajectory Tracking for Quadcopter UAV Moving Targets. Sensors 2024, 24, 1343. [Google Scholar] [CrossRef]
- Hussein, M.; Nouacer, R.; Corradi, F.; Ouhammou, Y.; Villar, E.; Tieri, C.; Castiñeira, R. Key Technologies for Safe and Autonomous Drones. Microprocess. Microsyst. 2021, 87, 104348. [Google Scholar] [CrossRef]
- Rovira-Sugranes, A.; Razi, A.; Afghah, F.; Chakareski, J. A Review of AI-Enabled Routing Protocols for UAV Networks: Trends, Challenges, and Future Outlook. Ad Hoc Netw. 2022, 130, 102790. [Google Scholar] [CrossRef]
- Jonnalagadda, A.V.; Hashim, H.A. SegNet: A Segmented Deep Learning Based Convolutional Neural Network Approach for Drones Wildfire Detection. Remote Sens. Appl. 2024, 34, 101181. [Google Scholar] [CrossRef]
- Horizon Hydrogen Fuel Cell-Powered Drone 2015. Available online: https://www.aerospace-technology.com/news/newshorizon-launches-hydrogen-fuel-cell-powered-drone-4570469/ (accessed on 16 July 2024).
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A Critical Review on Unmanned Aerial Vehicles Power Supply and Energy Management: Solutions, Strategies, and Prospects. Appl. Energy 2019, 255, 113823. [Google Scholar] [CrossRef]
- Bakirci, M. Smart City Air Quality Management through Leveraging Drones for Precision Monitoring. Sustain. Cities Soc. 2024, 106, 105390. [Google Scholar] [CrossRef]
- Ha, I. Improved A-Star Search Algorithm for Probabilistic Air Pollution Detection Using UAVs. Sensors 2024, 24, 1141. [Google Scholar] [CrossRef]

| Thematic Area | Author, Year | Title of the Article | Research Area | Year | Pollutant | UAV Model |
|---|---|---|---|---|---|---|
| Measurements | Fan Zhou et al., 25 November 2019 [37] | Monitoring of compliance with fuel sulfur content regulations through unmanned aerial vehicle (UAV) measurements of ship emissions | Waigaoqiao port in the Yangtze River, China | 2018 | SO2, CO2 | Matrice 600 PRO |
| Measurements | Jianbo Hu et al., 2022 [30] | UAV Inspection of Compliance of Fuel Sulfur Content of Sailing Ships in the Pearl River Delta, China | Pearl River Delta, China | 2022 | CO2, SO2 | The DJI Phantom 4 Pro V2.0 |
| Measurements | Fan Zhou et al., 2019 [28] | Measurement of SO2 and NO2 in Ship Plumes Using Rotary Unmanned Aerial System | Waigaoqiao port in Shanghai and Lianyungang port in Jiangsu Province, China | 2018 | SO2, NO2 | Matrice 600 |
| Measurements | Fan Zhou et al., 2020 [39] | Monitoring the compliance of sailing ships with fuel sulfur content regulations using unmanned aerial vehicle (UAV) measurements of ship emissions in open water | The channel of the Yangtze River estuary, near the Waigaoqiao port area to the north of Shanghai, China | 2019 | SO2, CO2 | Matrice 600 PRO |
| Measurements | Sudum Esaenwi et al., 2023 [40] | Development of Smart UAV (Drone) ozone (O3) monitoring system in Port Harcourt, Rivers State, Nigeria | Port Harcourt, Rivers State, Nigeria | 2023 | O3 | Self-developed |
| Measurements | Mengtao Deng et al., 2022 [41] | SO2 compliance monitoring and emission characteristics analysis of navigating ships: A case study of Shanghai waters in emission control areas, China. | Key waters of Shanghai, China | 2021 | SO2, CO2 | DJI Phantom 4 Pro V2.0 |
| Measurements | Xin Peng et al., 2021 [42] | Remote detection sulfur content in fuel oil used by ships in emission control areas: A case study of the Yantian model in Shenzhen | Yantian port, China | 2018 | SO2, CO2 | KWT-X6L |
| Measurements | Tommaso F. Villa et al., 2019 [29] | Characterization of the particle emissions from a ship operating at sea using an unmanned aerial vehicle | The Great Barrier Reef, Australia | 2016 | PN, CO2 | S800 EVO |
| Measurements | Haugen M. et al., 2022 [43] | Measurements and modelling of the three-dimensional near-field dispersion of particulate matter emitted from passenger ships in a port environment | Port of Rafina, Greece | 2021 | PN, BC | DJI Matrice 600 Pro |
| Path planning | Zhi-Hua Hu et al., 2023 [44] | A Drone Routing Problem for Ship Emission Detection Considering Simultaneous Movements | SECA around Shanghai, China | 2023 | - | - |
| Measurements | Fan Zhou et al., 2019 [45] | High-precision monitoring of compliance with fuel sulfur content through UAV measurements of ship emissions | Waigaoqiao port in the Yangtze River Delta, China | 2019 | SO2, CO2 | MATRICE 600 |
| Measurements | Haiwen Yuan et al., 2020 [46] | Maritime vessel emission monitoring by an UAV gas sensor system | Yantian harbor in Shenzhen City, China | 2020 | NO, NO2, SO2, CO2 | |
| Measurements | Fan Zhou et al., 22 July 2022 [27] | Tracking and measuring plumes from sailing ships using an unmanned aerial vehicle | Waigaoqiaoarea of the Pudong district of Shanghai, China | 2019 | SO2, CO2 | MATRICE 600 PRO |
| Measurements | Mengtao Deng et al., 2022 [47] | A Diffused Mini-Sniffing Sensor for Monitoring SO2 Emissions Compliance of Navigating Ships | - | 2021 | SO2, CO2 | The DJI Phantom 4 Pro V2.0 |
| Path planning | Xiaoqiong Bao, Zhihua Hu, Yanling Huang [48] | Routing a Fleet of Drones from a Base Station for Emission Detection of Moving Ships by Genetic Algorithm | - | 2024 | - | - |
| Measurements | Shiyi Yang et al. [49] | Evaluating methods for marine fuel sulfur content using microsensor sniffing systems on ocean-going vessels | Honk Kong | 2024 | NOx, SO2, CO2 | Matrice 210 V2 |
| Measurements | Abhishek Anand et al. [50] | Protocol development for real-time ship fuel sulfur content determination using drone-based plume sniffing microsensor system | Hong Kong | 2020 | CO2, SO2, NOx and CO | Matrice 210 RTK |
| Path planning | Shen et al. [51] | Synergistic path planning for ship-deployed multiple UAVs to monitor vessel pollution in ports | - | 2022 | - | - |
| Path planning | Hu et al. [52] | Scheduling Drones for Ship Emission Detection from Multiple Stations | - | 2023 | - | - |
| Path planning | Karachalios et al. [53] | Maritime Emission Monitoring: Development and Testing of a UAV-Based Real-Time Wind Sensing Mission Planner Module | - | 2024 | - | - |
| Ship Object recognition | Pikun et al. [54] | Unmanned aerial vehicles object detection based on image haze removal under sea fog conditions | China | 2022 | - | - |
| Ship Object recognition | Vasilopoulos et al. [55] | A Comparative Study of Autonomous Object Detection Algorithms in the Maritime Environment Using a UAV Platform | Athens, Greece | 2022 | - | Specially built octocopter |
| Measurements | Haugen et al. [56] | Particle Measurements from In-use Maritime Traffic Using an Unmanned Aerial Vehicle in Rafina, Greece | Rafina, Greece | 2023 | PN, BC | DJI Matrice 600 Pro |
| Path planning | Yan et al. [57] | Task allocation and route planning of multiple UAVs in marine environment based on an improved particle swarm optimization algorithm | - | 2021 | - | - |
| Model | Max Wind Resist, m/s. | Max Speed (no Wind), m/s. | UAV Weight (with Batteries), kg. | Max Payload, kg. | Max Flight Time, with Max Payload min. | Max Flight Time, with no Payload min. | Max Flight Distance, m. | Classification C0–C5. | Water Resist (IP) | Prop. Count |
|---|---|---|---|---|---|---|---|---|---|---|
| Matrice 600 PRO [77] | 8 | 18 | 10 | 6 | 16 | 32 | 5000 | C3–C4 | No | 6 |
| Matrice 600 [79] | 8 | 18 | 9.6 | 6 | 16 | 35 | 5000 | C3–C4 | No | 6 |
| Matrice 210 RTK [80] | 10 | 23 | 4.57 | 1.87 | 13 | 23 | 7000 | C3–C4 | Yes, IP 43 | 4 |
| DJI Phantom 4 Pro V2.0 [81] | 10 | 12.5 | 1.38 | 0.5 | - | 30 | 10,000 | C2 | No | 4 |
| KWT-X6L [78] | 13.7–17.1 | 15 | 16 | 5 | 40 | 65 | 5000 | C3–C4 | Yes | 6 |
| Manufacturer | Compatible UAV | Mount Location | Sensor | Type of Sensor | Range | Resolution | Accuracy |
|---|---|---|---|---|---|---|---|
| AEROMON (BH-12) * [82] | Explorer 1000 | Under UAV, no probe | NO | - | - | - | - |
| CO2 | - | - | - | - | |||
| CO | - | - | - | - | |||
| NO2 | - | - | - | - | |||
| SO2 | - | - | - | - | |||
| AIRMON (AirMon-10) * [83] | DJI MATRICE 210 V2, 300 | On top of UAV, no probe | PM2.5 | LS | 100~500 µg/m3 | - | ±50 µg/m3 |
| PM10 | LS | 0~100 µg/m3 | - | ±10 µg/m3 | |||
| CO | EC | - | 4 ppb | - | |||
| NO2 | EC | - | 15 ppb | - | |||
| SO2 | EC | - | 15 ppb | - | |||
| Purway, (PROPHET AM) * [84] | DJI MATRICE 210, 300 | On top of UAV, no probe | PM2.5 | LS | 100~500 µg/m3 | - | ±50 µg/m3 |
| PM10 | LS | 0~100 µg/m3 | - | ±10 µg/m3 | |||
| CO | EC | 0–1000 ppm | 4 ppb | - | |||
| NO2 | EC | 0–20 ppm | 15 ppb | - | |||
| SO2 | EC | 0–200 ppm | 15 ppb | - | |||
| Scentroid (DR1000 *, DR2000) * [85,86] | DJI MATRICE 600, DJI S1000 | Under UAV, probe outside UAV | CO2 CO | NDIR EC | 1–2000 ppm | 0.6 ppm | - |
| 0.03–100 ppm | 0.01 ppm | - | |||||
| 1–1000 ppm 30–10,000 ppm | 1 ppm 3 ppm | - | |||||
| - | |||||||
| SO2 | EC | 2–2000 ppm | 1 ppm | - | |||
| 0.01–1 ppm | 0.001 ppm | - | |||||
| 0.4–100 ppm | 0.2 ppm | - | |||||
| PM2.5,PM10 | LS | 1–1000 µg/m3 | 1 µg/m3 | - | |||
| Teledyne FLIR. (Muve C360) * [87] | DJI MATRICE 200 V1, V2, 300 | On top UAV, probe outside UAV | CO | - | - | - | - |
| NO2 | - | - | - | - | |||
| SO2 | - | - | - | - | |||
| H2S Cl2 | - | - | - | - | |||
| - | - | - | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Šaparnis, L.; Rapalis, P.; Daukšys, V. Ship Emission Measurements Using Multirotor Unmanned Aerial Vehicles: Review. J. Mar. Sci. Eng. 2024, 12, 1197. https://doi.org/10.3390/jmse12071197
Šaparnis L, Rapalis P, Daukšys V. Ship Emission Measurements Using Multirotor Unmanned Aerial Vehicles: Review. Journal of Marine Science and Engineering. 2024; 12(7):1197. https://doi.org/10.3390/jmse12071197
Chicago/Turabian StyleŠaparnis, Lukas, Paulius Rapalis, and Vygintas Daukšys. 2024. "Ship Emission Measurements Using Multirotor Unmanned Aerial Vehicles: Review" Journal of Marine Science and Engineering 12, no. 7: 1197. https://doi.org/10.3390/jmse12071197