
Enhancing Wave Energy Converters: Dynamic Inertia Strategies for Efficiency Improvement

Abstract
:1. Introduction
2. Background
2.1. Conceptual Approach
2.2. Relevance of the System
3. System Description
3.1. Model Statement
3.2. Model Implementation
3.3. NHS Prototype
4. Results and Discussion
4.1. Testing Conditions
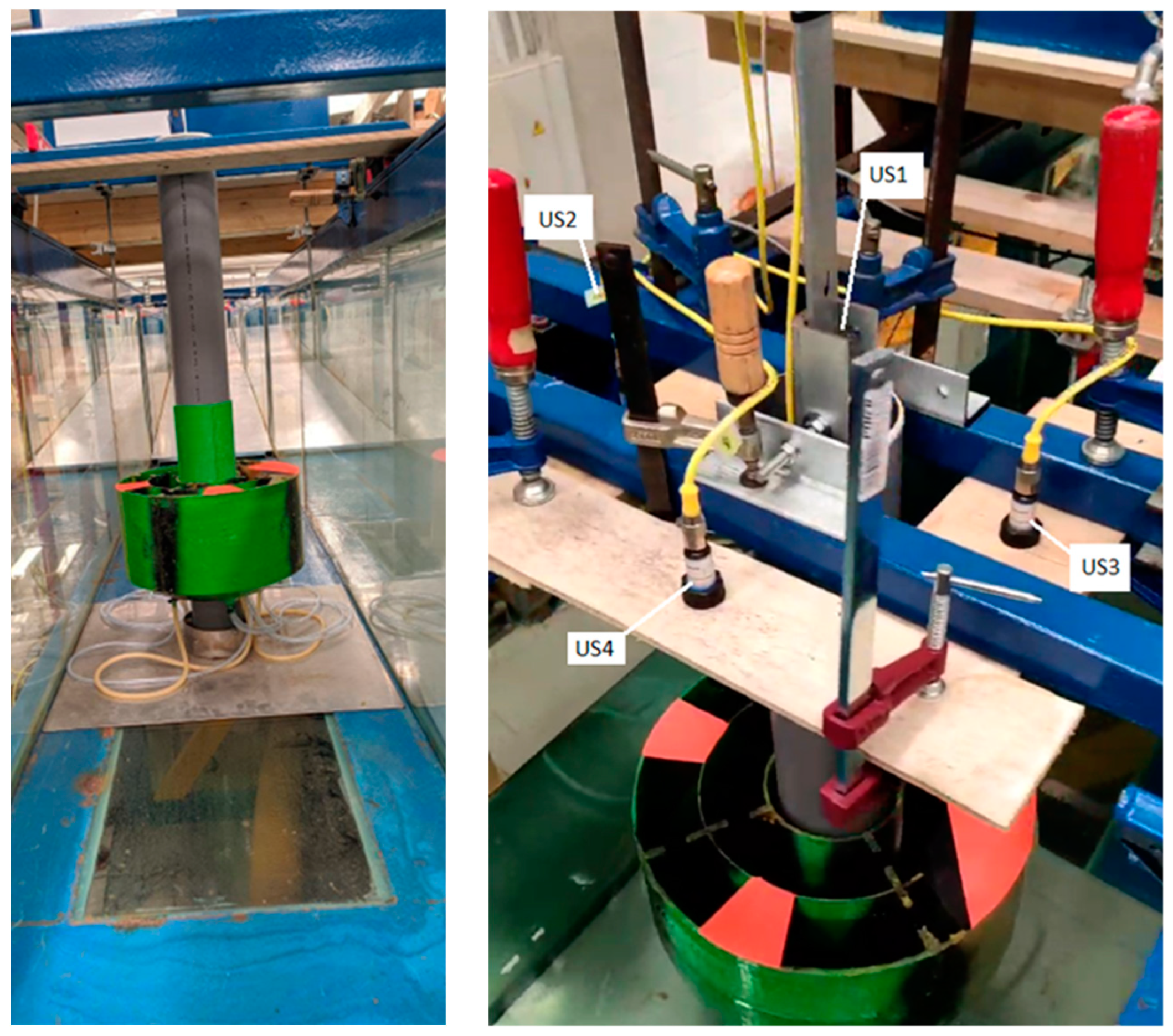
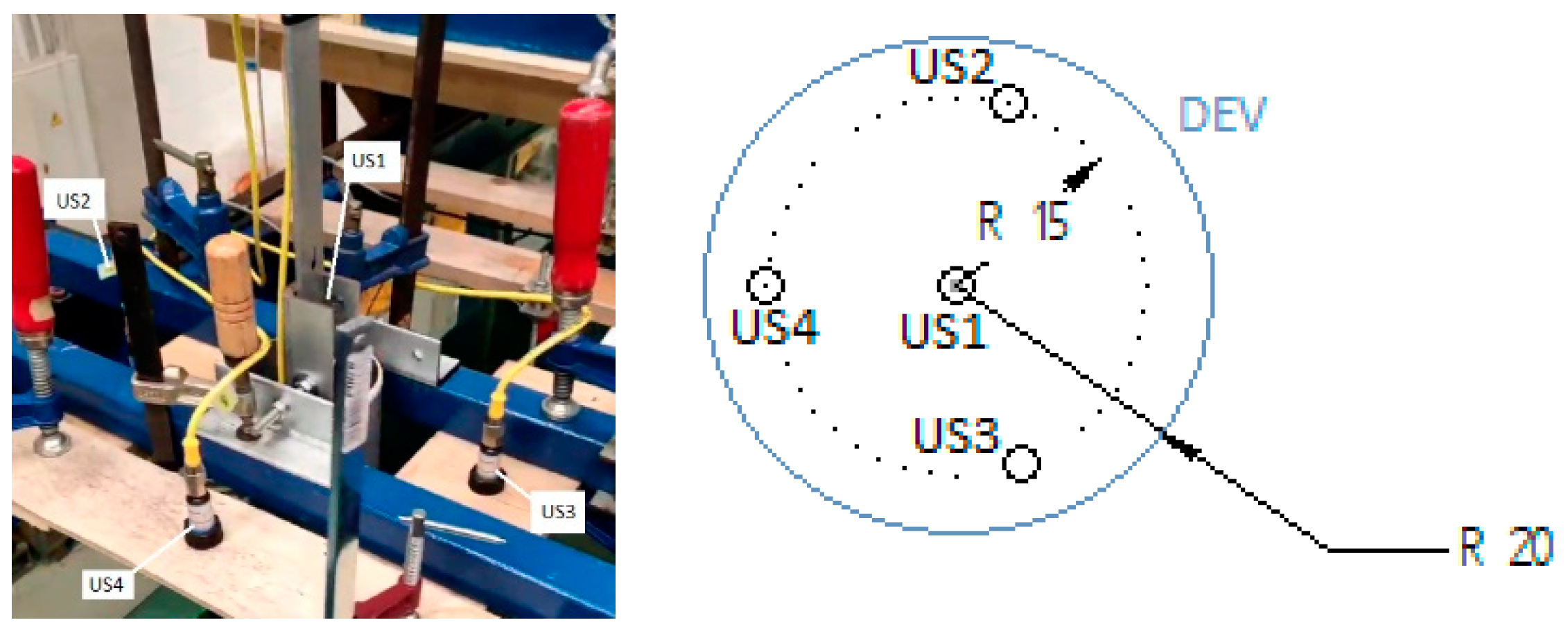
4.2. Wave Flume Facility and Instrumentation
- Conductivity wave gauges (WGs) measuring wave height
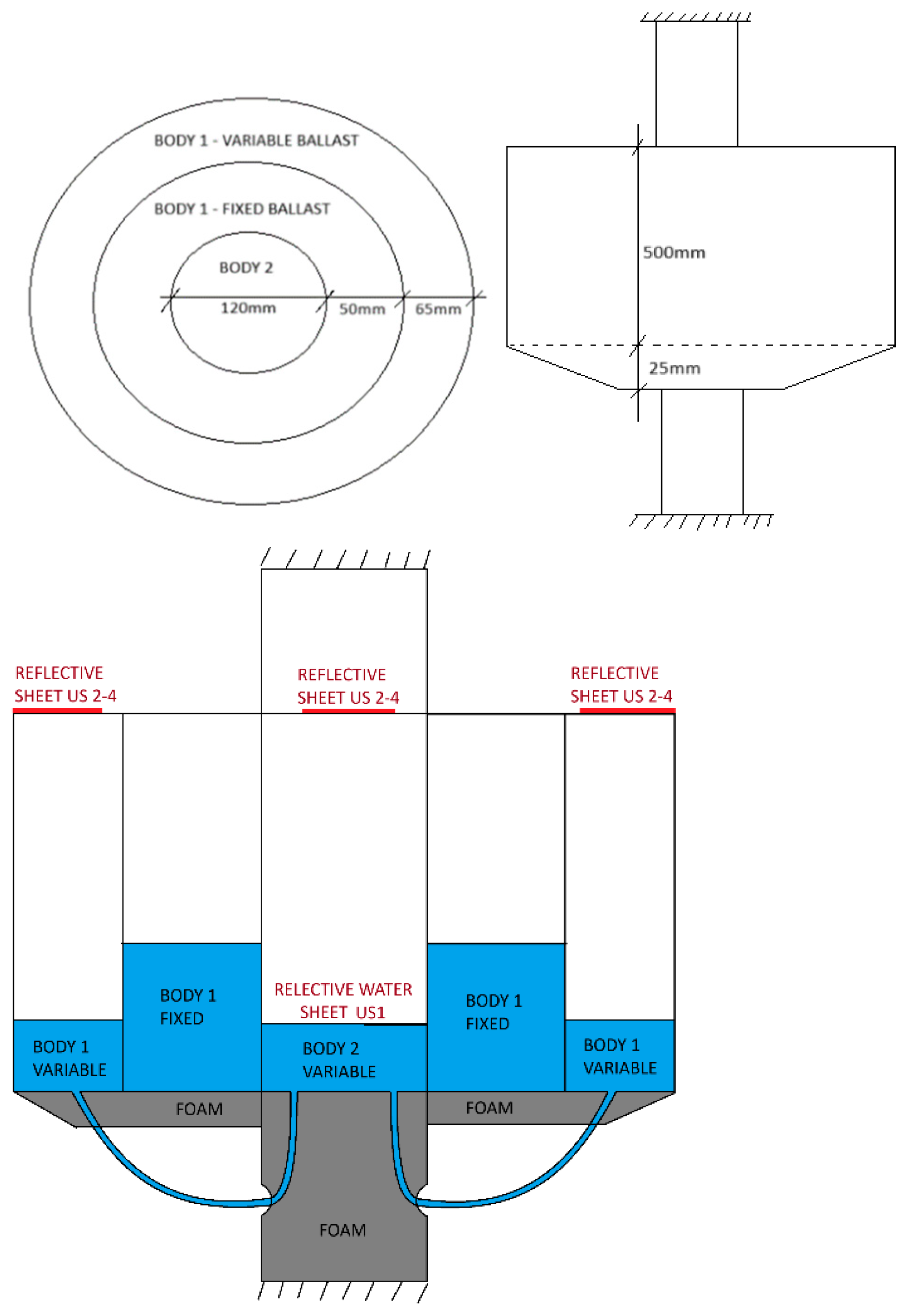
- Ultrasonic level sensors (USs) measuring prime mover (2–4) and spar water sheet (1) position
- Active reflected wave absorption and transverse wave absorption system avoids, to some degree, non-linear effects such as reflections
- Remote monitoring video system
4.3. Decay Test
4.4. NHS Regular Waves
4.5. FHS Regular Waves
4.6. Irregular Wave Analysis
5. Conclusions
6. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Avalos, G.O.G.; Peña, J.C.U.; Rodríguez, C.L.M. Preliminary study of the performance of a new wave energy converter. J. Ocean Eng. Mar. Energy 2024, 10, 125–136. [Google Scholar] [CrossRef]
- Li, H.; Wu, J.; Shi, X.; Kong, L.; Kong, W.; Zhang, Z.; Pan, Y.; Luo, D.; Yan, J. A self-powered smart wave energy converter for sustainable sea. Mech. Syst. Signal Process. 2024, 220, 111641. [Google Scholar] [CrossRef]
- Cotten, A.; Kurniawan, A.; Neary, V.; Coe, R.; Bacelli, G. A compressible degree of freedom as a means for improving the performance of heaving wave energy converters. Renew. Energy 2024, 227, 12. [Google Scholar] [CrossRef]
- Li, J.; Rong, S.; Yang, H.; Zheng, X. Experimental and numerical study on the integration of a built-in wave energy converter (BIWEC) and floating platform. Ocean Eng. 2024, 299, 117408. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, K.; Ke, L.; Zhang, X.; Jiang, W.; Gao, Z. Application of a coupled linear-bistable system in point absorber wave energy converter. Ocean Eng. 2024, 299, 117090. [Google Scholar] [CrossRef]
- Vervaet, T.; Quartier, N.; Moreno, E.; Fernandez, G.; Ferri, F.; Stratigaki, V.; Troch, P. System identification and centralised causal impedance matching control of a row of two heaving point absorber wave energy converters. Ocean Eng. 2024, 309, 118399. [Google Scholar] [CrossRef]
- Zou, S.; Robertson, B.; Roach, A.; Mundon, T.; Rosenberg, B.; Penalba, M. Wave energy converter arrays: A methodology to assess performance considering the disturbed wave field. Renew. Energy 2024, 229, 120719. [Google Scholar] [CrossRef]
- Gharechae, A.; Abazari, A.; Soleimani, K. Performance assessment of a combined circular aquaculture cage floater and point absorber wave energy converters. Ocean Eng. 2024, 300, 117239. [Google Scholar] [CrossRef]
- Chen, Z.; Sun, J.; Yang, J.; Sun, Y.; Chen, Q.; Zhao, H.; Qian, P.; Si, Y.; Zhang, D. Experimental and numerical analysis of power take-off control effects on the dynamic performance of a floating wind-wave combined system. Renew. Energy 2024, 226, 120353. [Google Scholar] [CrossRef]
- Jin, S.; Zheng, S.; Greaves, D. On the scalability of wave energy converters. Ocean Eng. 2022, 243, 110212. [Google Scholar] [CrossRef]
- Papini, G.; Faedo, N.; Mattiazzo, G. Fault diagnosis and fault-tolerant control in wave energy: A perspective. Renew. Sustain. Energy Rev. 2024, 199, 114507. [Google Scholar] [CrossRef]
- Kang, D.; Suvitha, K.; Narayanamoorthy, S.; Sandra, M.; Pamucar, D. Evaluation of wave energy converters based on integrated ELECTRE approach. Expert Syst. Appl. 2024, 242, 15. [Google Scholar] [CrossRef]
- Majidi, A.G.; Bingölbali, B.; Akpinar, A.; Rusu, E. Wave power performance of wave energy converters at high-energy areas of a semi-enclosed sea. Energy 2021, 220, 119705. [Google Scholar] [CrossRef]
- Aderinto, T.; Li, H. Ocean Wave Energy Converters: Status and Challenges. Energies 2018, 11, 1250. [Google Scholar] [CrossRef]
- Wedge Global SL. Available online: https://wedgeglobal.com/ (accessed on 18 March 2024).
- Ocean Power Technologies. Available online: https://oceanpowertechnologies.com/platform/opt-pb3-powerbuoy/ (accessed on 18 March 2024).
- Columbia Power History. Available online: https://cpower.co/about/#history (accessed on 18 March 2024).
- Maria-Arenas, A.; Garrido, A.J.; Rusu, E.; Garrido, I. Control Strategies Applied to Wave Energy Converters: State of the Art. Energies 2019, 12, 3115. [Google Scholar] [CrossRef]
- OpenEI PRIMRE, Marine Energy Technologies. Available online: https://openei.org/wiki/PRIMRE/Databases/Projects_Database/Technologies (accessed on 21 July 2024).
- IEC Technical Specification 62600-1, Marine Energy—Wave, Tidal and Other Water Current Converters—Part 1: Vocabulary. 2020. Available online: https://cdn.standards.iteh.ai/samples/102989/5a3d1ae0242c45be99b961a6ad876eab/IEC-TS-62600-1-2020.pdf (accessed on 18 March 2024).
- IEC Technical Specification 62600-2, Marine Energy—Wave, Tidal and Other Water Current Converters—Part 2: Marine Energy Systems—Design Requirements. 2019. Available online: https://webstore.iec.ch/en/publication/62399 (accessed on 18 March 2024).
- Todalshaug, J.H.; Ásgeirsson, G.S.; Hjálmarsson, E.; Maillet, J.; Möller, P.; Pires, P.; Guérinel, M.; Lopes, M. Tank testing of an inherently phase-controlled wave energy converter. Int. J. Mar. Energy 2016, 15, 68–84. [Google Scholar] [CrossRef]
- Grasberger, J.; Bird, J.; Coe, R.; Bacelli, G.; Ströfer, C.; Hagmuller, A. Maximizing Wave Energy Converter Power Extraction by Utilizing a Variable Negative Stiffness Magnetic Spring. In Proceedings of the 15th European Wave and Tidal Energy Conference (EWTEC 2023) 2023, Bilbao, Spain, 3–7 September 2023. [Google Scholar] [CrossRef]
- Portillo, J.; Gato, L.; Henriques, J.; Falcão, A. Implications of spring-like air compressibility effects in floating coaxial-duct OWCs: Experimental and numerical investigation. Renew. Energy 2023, 212, 478–491. [Google Scholar] [CrossRef]
- Li, B.; Li, C.; Zhang, B.; Deng, F.; Yang, H. The effect of the different spacing ratios on wave energy converter of three floating bodies. Energy 2023, 268, 16. [Google Scholar] [CrossRef]
- Falcao, A.; Henriques, J.; Gomes, R.; Portillo, J. Theoretically based correction to model test results of OWC wave energy converters to account for air compressibility effect. Renew. Energy 2022, 198, 41–50. [Google Scholar] [CrossRef]
- Zhang, X.; Tian, X.; Xiao, L.; Li, X.; Lu, W. Mechanism and sensitivity for broadband energy harvesting of an adaptive bistable point absorber wave energy converter. Energy 2019, 188, 37. [Google Scholar] [CrossRef]
- Tetu, A.; Ferri, F.; Kramer, M.; Todalshaug, J. Physical and Mathematical Modeling of a Wave Energy Converter Equipped with a Negative Spring Mechanism for Phase Control. Energies 2018, 11, 2362. [Google Scholar] [CrossRef]
- Todalshaug, J.H. Hydrodynamics of WECs. In Handbook of Ocean Wave Energy; Ocean Engineering & Oceanography Book Series; Pecher, A., Kofoed, J., Eds.; Springer: Cham, Switzerland, 2017; Volume 7. [Google Scholar] [CrossRef]
- Cveticanin, L. Dynamics of Bodies with Time-Variable Mass; Springer: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- WEC-Sim. Available online: https://wec-sim.github.io/WEC-Sim/master/index.html (accessed on 18 March 2024).
- WEC-Sim Formulation. Available online: https://wec-sim.github.io/WEC-Sim/main/theory/theory.html (accessed on 22 June 2024).
- European Comission CORDIS: SEA-TITAN. Available online: https://cordis.europa.eu/project/id/764014 (accessed on 18 March 2024).
- USC Facilities and Equipment. Available online: https://www.usc.gal/en/investigacion/grupos/gicema/instalacions.html (accessed on 20 January 2022).
- Pecher, A. Experimental Testing and Evaluation of WECs. In Handbook of Ocean Wave Energy; Springer Open: Cham, Switzerland, 2017; pp. 221–260. [Google Scholar]
- Folley, M. The Wave Energy Resource. In Handbook of Ocean Wave Energy; Springer Open: Cham, Switzerland, 2017; pp. 43–79. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Significant Wave height range (m) | [0.5–5.5] |
| Significant Wave height step (m) | 0.50 |
| Peak period range (s) | [5–16.5] |
| Peak period step (s) | 0.50 |
| Water depth (m) | 40 |
| Wave height range (m) | [0.03–0.14] |
| Wave height step (m) | 0.01 |
| Period range (s) | [0.80–3.60] |
| Period step (s) | 0.20 |
| Water depth (m) | 0.5 |
| Configuration | Fixed Ballast (cm3) | Variable Ballast (cm3) | Reactive Indicator |
|---|---|---|---|
| Base | 3000.00 | 0.00 | 0.00 |
| Extreme | 3000.00 | 800.00 | 0.21 |
| Mild | 9000.00 | 400.00 | 0.04 |
| Test ID | H (m) | T (s) |
|---|---|---|
| 1 | 0.03 | 1.45 |
| 2 | 0.03 | 1.57 |
| 3 | 0.03 | 1.68 |
| 4 | 0.03 | 1.79 |
| 5 | 0.05 | 1.45 |
| 6 | 0.05 | 1.57 |
| 7 | 0.05 | 1.68 |
| 8 | 0.05 | 1.79 |
| 9 | 0.06 | 3 |
| 10 | 0.06 | 3.2 |
| 11 | 0.06 | 3.6 |
| 12 | 0.08 | 1.45 |
| 13 | 0.08 | 1.57 |
| 14 | 0.08 | 1.68 |
| 15 | 0.08 | 1.79 |
| 16 | 0.08 | 3 |
| 17 | 0.08 | 3.5 |
| 18 | 0.09 | 3.4 |
| 19 | 0.1 | 1.79 |
| 20 | 0.1 | 1.9 |
| 21 | 0.1 | 3 |
| 22 | 0.12 | 3.1 |
| 23 | 0.12 | 3.3 |
| 24 | 0.13 | 1.9 |
| 25 | 0.13 | 2.01 |
| 26 | 0.14 | 3.1 |
| 27 | 0.14 | 3.2 |
| Test ID | H (m) | T (s) |
|---|---|---|
| 1 | 0.05 | 1.57 |
| 2 | 0.05 | 1.79 |
| 3 | 0.05 | 5.00 |
| 4 | 0.06 | 3.00 |
| 5 | 0.06 | 3.10 |
| 6 | 0.06 | 3.20 |
| 7 | 0.06 | 3.60 |
| 8 | 0.08 | 3.00 |
| 9 | 0.08 | 3.50 |
| 10 | 0.10 | 1.90 |
| 11 | 0.10 | 2.50 |
| 12 | 0.10 | 3.00 |
| 13 | 0.10 | 3.40 |
| 14 | 0.10 | 4.50 |
| 15 | 0.10 | 6.00 |
| 16 | 0.12 | 3.10 |
| 17 | 0.12 | 3.30 |
| 18 | 0.13 | 2.12 |
| 19 | 0.13 | 5.00 |
| 20 | 0.14 | 3.10 |
| 21 | 0.14 | 3.20 |
| 22 | 0.14 | 3.40 |
| 23 | 0.14 | 3.60 |
| Test ID | H (m) | T (s) |
|---|---|---|
| 1 | 0.03 | 0.84 |
| 2 | 0.0.3 | 1.45 |
| 3 | 0.03 | 1.57 |
| 4 | 0.03 | 1.68 |
| 5 | 0.03 | 1.79 |
| 6 | 0.05 | 0.84 |
| 7 | 0.05 | 1.45 |
| 8 | 0.05 | 1.57 |
| 9 | 0.05 | 1.68 |
| 10 | 0.05 | 1.79 |
| 11 | 0.08 | 1.45 |
| 12 | 0.08 | 1.57 |
| 13 | 0.08 | 1.68 |
| 14 | 0.08 | 1.79 |
| 15 | 0.1 | 1.79 |
| 16 | 0.1 | 1.9 |
| 17 | 0.13 | 1.9 |
| 18 | 0.13 | 2.01 |
| Natural Period (s) | Logarithmic Decrement | Damping Ratio | |||
|---|---|---|---|---|---|
| Mean | Variance | n = 2 | - | ||
| Physical test | Base | 0.6673 | 0.0008 | 0.1560 | 0.0248 |
| Extreme | 0.7021 | 0.0051 | 0.2524 | 0.0401 | |
| Mild | 0.8364 | 0.0015 | 0.3311 | 0.0526 | |
| Numerical model Before calibration | Base | 0.6871 | 0.1460 | 0.0232 | |
| Extreme | 0.7548 | 0.2310 | 0.0336 | ||
| Mild | 0.8541 | 0.3001 | 0.0477 | ||
| Numerical model After calibration | Base | 0.6664 | 0.1543 | 0.0246 | |
| Extreme | 0.7017 | 0.2528 | 0.0402 | ||
| Mild | 0.8360 | 0.3307 | 0.0526 | ||
| Mean | Std. Variation | |
|---|---|---|
| Base | 86.22% | 2.66% |
| Extreme | 90.69% | 7.53% |
| Mild | 90.91% | 9.44% |
| Amplification Average | Amplification Std. Variation | FHS Optimum Activation Trigger | FHS Optimum Deactivation Trigger | |
|---|---|---|---|---|
| Base | N/A | N/A | N/A | N/A |
| Extreme | 32.74% | 6.87% | 21.43% | 78.12% |
| Mild | 7.48% | 4.14% | 27.51% | 77.48% |
| SD_UK | Hs (m) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.5 | 1 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 | 4.5 | 5 | 5.5 | ||
| Tp (s) | 5 | 0.01% | 0.23% | 0.54% | 0.04% | 0.00% | 0.01% | 0.02% | 0.01% | 0.01% | 0.00% | 0.00% |
| 5.5 | 0.03% | 0.29% | 1.06% | 0.46% | 0.02% | 0.00% | 0.01% | 0.01% | 0.00% | 0.00% | 0.00% | |
| 6 | 0.03% | 0.37% | 0.59% | 1.26% | 0.21% | 0.01% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% | |
| 6.5 | 0.04% | 0.37% | 0.46% | 0.98% | 0.96% | 0.13% | 0.01% | 0.00% | 0.00% | 0.00% | 0.00% | |
| 7 | 0.04% | 0.50% | 0.44% | 0.50% | 1.01% | 0.66% | 0.10% | 0.01% | 0.00% | 0.00% | 0.00% | |
| 7.5 | 0.06% | 0.80% | 0.61% | 0.40% | 0.46% | 0.65% | 0.31% | 0.05% | 0.00% | 0.00% | 0.00% | |
| 8 | 0.06% | 0.93% | 0.85% | 0.49% | 0.34% | 0.33% | 0.30% | 0.11% | 0.02% | 0.00% | 0.00% | |
| 8.5 | 0.02% | 1.11% | 1.21% | 0.71% | 0.43% | 0.34% | 0.28% | 0.30% | 0.10% | 0.03% | 0.01% | |
| 9 | 0.02% | 1.27% | 1.92% | 0.81% | 0.40% | 0.26% | 0.21% | 0.15% | 0.11% | 0.04% | 0.01% | |
| 9.5 | 0.00% | 0.81% | 1.77% | 1.05% | 0.52% | 0.29% | 0.20% | 0.16% | 0.11% | 0.07% | 0.04% | |
| 10 | 0.01% | 0.71% | 2.41% | 1.72% | 0.82% | 0.45% | 0.23% | 0.19% | 0.11% | 0.05% | 0.04% | |
| 10.5 | 0.00% | 0.28% | 1.34% | 1.42% | 0.73% | 0.44% | 0.22% | 0.16% | 0.10% | 0.06% | 0.04% | |
| 11 | 0.01% | 0.24% | 1.50% | 2.05% | 1.30% | 0.74% | 0.44% | 0.26% | 0.16% | 0.10% | 0.05% | |
| 11.5 | 0.00% | 0.10% | 0.68% | 1.46% | 1.18% | 0.65% | 0.42% | 0.24% | 0.17% | 0.09% | 0.06% | |
| 12 | 0.00% | 0.11% | 0.70% | 1.62% | 1.72% | 1.13% | 0.71% | 0.39% | 0.24% | 0.14% | 0.07% | |
| 12.5 | 0.00% | 0.06% | 0.30% | 0.92% | 1.19% | 1.12% | 0.68% | 0.42% | 0.24% | 0.15% | 0.08% | |
| 13 | 0.00% | 0.06% | 0.28% | 0.74% | 1.18% | 1.10% | 0.81% | 0.47% | 0.32% | 0.18% | 0.09% | |
| 13.5 | 0.00% | 0.04% | 0.19% | 0.45% | 0.90% | 1.06% | 0.80% | 0.60% | 0.40% | 0.24% | 0.14% | |
| 14 | 0.00% | 0.02% | 0.10% | 0.21% | 0.40% | 0.56% | 0.52% | 0.41% | 0.29% | 0.19% | 0.13% | |
| 14.5 | 0.00% | 0.02% | 0.12% | 0.24% | 0.35% | 0.49% | 0.55% | 0.50% | 0.35% | 0.27% | 0.18% | |
| 15 | 0.00% | 0.01% | 0.05% | 0.10% | 0.14% | 0.23% | 0.33% | 0.34% | 0.30% | 0.20% | 0.14% | |
| 15.5 | 0.00% | 0.01% | 0.03% | 0.06% | 0.10% | 0.14% | 0.17% | 0.19% | 0.20% | 0.14% | 0.09% | |
| 16 | 0.00% | 0.00% | 0.04% | 0.07% | 0.09% | 0.11% | 0.13% | 0.16% | 0.16% | 0.17% | 0.11% | |
| 16.5 | 0.00% | 0.00% | 0.01% | 0.03% | 0.04% | 0.04% | 0.04% | 0.06% | 0.07% | 0.08% | 0.09% | |
| PM Base | Hs (m) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.5 | 1 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 | 4.5 | 5 | 5.5 | ||
| Tp (s) | 5 | 1.68 | 6.74 | 15.16 | 26.95 | 42.11 | 60.64 | 82.54 | 107.80 | 136.44 | 168.44 | 203.81 |
| 5.5 | 1.89 | 7.57 | 17.04 | 30.29 | 47.33 | 68.16 | 92.77 | 121.16 | 153.35 | 189.32 | 229.08 | |
| 6 | 1.87 | 7.46 | 16.79 | 29.85 | 46.64 | 67.16 | 91.42 | 119.40 | 151.12 | 186.57 | 225.75 | |
| 6.5 | 1.82 | 7.28 | 16.38 | 29.12 | 45.50 | 65.52 | 89.18 | 116.48 | 147.42 | 181.99 | 220.21 | |
| 7 | 1.77 | 7.06 | 15.89 | 28.25 | 44.13 | 63.55 | 86.50 | 112.98 | 142.99 | 176.53 | 213.60 | |
| 7.5 | 1.67 | 6.70 | 15.07 | 26.79 | 41.86 | 60.28 | 82.05 | 107.17 | 135.64 | 167.46 | 202.62 | |
| 8 | 1.49 | 5.96 | 13.42 | 23.86 | 37.28 | 53.68 | 73.06 | 95.43 | 120.78 | 149.11 | 180.42 | |
| 8.5 | 1.42 | 5.69 | 12.80 | 22.76 | 35.57 | 51.22 | 69.71 | 91.05 | 115.24 | 142.27 | 172.15 | |
| 9 | 1.36 | 5.43 | 12.22 | 21.73 | 33.95 | 48.88 | 66.53 | 86.90 | 109.98 | 135.78 | 164.30 | |
| 9.5 | 1.26 | 5.05 | 11.35 | 20.18 | 31.54 | 45.41 | 61.81 | 80.73 | 102.17 | 126.14 | 152.63 | |
| 10 | 1.20 | 4.80 | 10.80 | 19.20 | 29.99 | 43.19 | 58.79 | 76.79 | 97.18 | 119.98 | 145.18 | |
| 10.5 | 1.13 | 4.51 | 10.14 | 18.03 | 28.17 | 40.57 | 55.22 | 72.12 | 91.28 | 112.69 | 136.35 | |
| 11 | 1.06 | 4.25 | 9.57 | 17.02 | 26.59 | 38.28 | 52.11 | 68.06 | 86.14 | 106.35 | 128.68 | |
| 11.5 | 1.00 | 4.01 | 9.02 | 16.04 | 25.06 | 36.08 | 49.11 | 64.14 | 81.18 | 100.22 | 121.27 | |
| 12 | 0.95 | 3.81 | 8.58 | 15.25 | 23.82 | 34.30 | 46.69 | 60.98 | 77.18 | 95.29 | 115.30 | |
| 12.5 | 0.91 | 3.62 | 8.15 | 14.49 | 22.64 | 32.60 | 44.37 | 57.95 | 73.34 | 90.55 | 109.56 | |
| 13 | 0.84 | 3.38 | 7.60 | 13.51 | 21.11 | 30.39 | 41.37 | 54.03 | 68.38 | 84.42 | 102.15 | |
| 13.5 | 0.79 | 3.16 | 7.12 | 12.66 | 19.77 | 28.47 | 38.76 | 50.62 | 64.07 | 79.10 | 95.71 | |
| 14 | 0.74 | 2.95 | 6.63 | 11.78 | 18.41 | 26.51 | 36.08 | 47.12 | 59.64 | 73.63 | 89.10 | |
| 14.5 | 0.70 | 2.80 | 6.31 | 11.22 | 17.52 | 25.24 | 34.35 | 44.86 | 56.78 | 70.10 | 84.82 | |
| 15 | 0.66 | 2.64 | 5.94 | 10.56 | 16.50 | 23.76 | 32.35 | 42.25 | 53.47 | 66.01 | 79.88 | |
| 15.5 | 0.62 | 2.49 | 5.60 | 9.96 | 15.56 | 22.41 | 30.51 | 39.84 | 50.43 | 62.26 | 75.33 | |
| 16 | 0.59 | 2.36 | 5.31 | 9.45 | 14.76 | 21.25 | 28.93 | 37.78 | 47.82 | 59.04 | 71.44 | |
| 16.5 | 0.56 | 2.24 | 5.03 | 8.94 | 13.97 | 20.12 | 27.38 | 35.77 | 45.27 | 55.89 | 67.62 | |
| PM Extreme | Hs (m) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.5 | 1 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 | 4.5 | 5 | 5.5 | ||
| Tp (s) | 5 | 1.94 | 7.48 | 18.36 | 30.76 | 46.11 | 67.06 | 100.35 | 126.77 | 141.22 | 205.94 | 223.23 |
| 5.5 | 2.21 | 8.65 | 17.17 | 32.95 | 52.22 | 85.84 | 111.98 | 142.87 | 184.88 | 213.24 | 236.90 | |
| 6 | 1.99 | 9.02 | 17.15 | 35.22 | 52.91 | 71.38 | 102.73 | 135.62 | 166.65 | 213.87 | 255.88 | |
| 6.5 | 2.04 | 8.80 | 18.77 | 33.85 | 55.38 | 74.54 | 96.83 | 129.84 | 151.12 | 206.38 | 251.36 | |
| 7 | 2.02 | 7.86 | 17.27 | 31.61 | 48.82 | 71.53 | 90.96 | 111.63 | 152.20 | 198.93 | 230.98 | |
| 7.5 | 1.80 | 8.15 | 16.63 | 29.64 | 46.58 | 63.52 | 97.28 | 112.39 | 145.74 | 190.43 | 218.55 | |
| 8 | 1.71 | 5.89 | 15.29 | 27.28 | 38.32 | 56.89 | 83.08 | 100.67 | 132.55 | 165.95 | 217.63 | |
| 8.5 | 1.78 | 6.66 | 14.90 | 25.80 | 43.35 | 57.30 | 79.70 | 94.82 | 139.83 | 170.59 | 192.95 | |
| 9 | 1.59 | 6.26 | 13.37 | 26.88 | 41.32 | 52.29 | 77.89 | 100.43 | 117.78 | 159.26 | 200.17 | |
| 9.5 | 1.52 | 6.22 | 11.26 | 24.89 | 35.38 | 54.11 | 71.02 | 90.49 | 119.45 | 132.80 | 176.67 | |
| 10 | 1.54 | 5.72 | 12.79 | 22.16 | 33.79 | 45.27 | 68.38 | 80.41 | 107.28 | 148.09 | 174.74 | |
| 10.5 | 1.42 | 5.20 | 12.14 | 21.05 | 30.48 | 45.93 | 61.13 | 84.58 | 99.75 | 141.85 | 159.04 | |
| 11 | 1.15 | 4.98 | 10.53 | 18.58 | 28.18 | 41.77 | 58.53 | 74.22 | 95.64 | 129.29 | 152.79 | |
| 11.5 | 1.20 | 4.67 | 11.56 | 16.46 | 26.13 | 42.15 | 54.25 | 73.64 | 91.43 | 113.67 | 138.93 | |
| 12 | 1.08 | 4.70 | 9.08 | 17.14 | 30.06 | 38.22 | 52.45 | 72.49 | 88.63 | 102.99 | 144.37 | |
| 12.5 | 1.04 | 4.10 | 9.35 | 16.73 | 25.23 | 35.02 | 48.64 | 66.80 | 78.85 | 109.41 | 126.28 | |
| 13 | 1.05 | 3.85 | 9.38 | 17.31 | 23.05 | 32.88 | 43.36 | 62.08 | 79.02 | 102.43 | 109.82 | |
| 13.5 | 0.92 | 3.70 | 8.06 | 13.39 | 20.29 | 30.17 | 43.89 | 58.88 | 71.82 | 84.71 | 114.76 | |
| 14 | 0.89 | 3.40 | 7.72 | 13.52 | 20.70 | 27.64 | 39.37 | 52.16 | 62.45 | 86.08 | 104.51 | |
| 14.5 | 0.90 | 3.45 | 6.90 | 12.72 | 20.22 | 31.85 | 40.13 | 50.39 | 66.59 | 77.38 | 89.30 | |
| 15 | 0.83 | 3.14 | 5.89 | 13.06 | 20.11 | 26.48 | 36.05 | 46.67 | 58.31 | 72.13 | 98.60 | |
| 15.5 | 0.67 | 2.87 | 6.63 | 12.28 | 18.94 | 25.07 | 32.77 | 44.76 | 57.90 | 69.13 | 94.82 | |
| 16 | 0.71 | 2.77 | 6.36 | 10.91 | 16.56 | 22.73 | 33.08 | 41.41 | 56.85 | 66.50 | 86.85 | |
| 16.5 | 0.64 | 2.61 | 5.54 | 10.44 | 15.74 | 23.98 | 32.05 | 37.25 | 52.18 | 64.18 | 76.69 | |
| PM Mild | Hs (m) | |||||||||||
| 0.5 | 1 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 | 4.5 | 5 | 5.5 | ||
| Tp (s) | 5 | 1.76 | 7.06 | 15.83 | 27.88 | 42.66 | 65.06 | 84.65 | 109.23 | 139.93 | 169.68 | 213.20 |
| 5.5 | 1.94 | 7.75 | 17.41 | 31.68 | 48.75 | 69.48 | 96.46 | 123.43 | 157.81 | 193.29 | 234.70 | |
| 6 | 1.91 | 7.65 | 17.13 | 31.78 | 47.32 | 69.04 | 93.43 | 121.84 | 157.37 | 192.36 | 233.68 | |
| 6.5 | 1.87 | 7.35 | 16.89 | 29.72 | 46.64 | 67.74 | 90.97 | 117.02 | 150.96 | 188.25 | 221.46 | |
| 7 | 1.77 | 7.36 | 16.46 | 29.18 | 45.90 | 65.22 | 88.21 | 117.44 | 148.36 | 182.10 | 225.12 | |
| 7.5 | 1.70 | 6.86 | 15.28 | 27.46 | 43.60 | 62.12 | 84.63 | 108.92 | 136.71 | 175.45 | 207.52 | |
| 8 | 1.56 | 6.14 | 14.08 | 24.37 | 37.48 | 55.01 | 75.80 | 96.79 | 123.63 | 153.20 | 193.90 | |
| 8.5 | 1.53 | 6.13 | 13.29 | 24.02 | 38.06 | 50.65 | 75.66 | 97.48 | 117.80 | 151.46 | 175.43 | |
| 9 | 1.43 | 5.54 | 12.81 | 22.65 | 35.17 | 51.47 | 67.26 | 92.93 | 110.02 | 144.48 | 166.21 | |
| 9.5 | 1.34 | 5.35 | 11.84 | 21.17 | 33.00 | 48.01 | 64.34 | 84.21 | 105.55 | 130.21 | 153.53 | |
| 10 | 1.30 | 4.98 | 11.55 | 20.10 | 30.68 | 44.28 | 60.92 | 80.44 | 101.37 | 124.05 | 156.65 | |
| 10.5 | 1.22 | 4.60 | 10.57 | 18.87 | 27.86 | 41.01 | 57.60 | 75.23 | 93.02 | 116.21 | 139.36 | |
| 11 | 1.11 | 4.50 | 10.23 | 18.21 | 28.00 | 39.85 | 54.59 | 72.46 | 87.14 | 107.94 | 134.82 | |
| 11.5 | 1.06 | 4.16 | 9.52 | 16.62 | 26.50 | 37.39 | 50.20 | 68.25 | 81.66 | 105.79 | 124.88 | |
| 12 | 1.03 | 3.95 | 8.94 | 15.96 | 24.42 | 36.72 | 46.71 | 62.95 | 83.28 | 96.03 | 117.19 | |
| 12.5 | 0.98 | 3.79 | 8.55 | 14.82 | 24.57 | 34.86 | 45.84 | 59.92 | 75.53 | 93.79 | 113.88 | |
| 13 | 0.90 | 3.51 | 8.13 | 14.66 | 21.58 | 30.97 | 41.69 | 56.26 | 71.36 | 89.72 | 103.86 | |
| 13.5 | 0.83 | 3.31 | 7.38 | 12.80 | 19.78 | 28.80 | 40.15 | 52.95 | 66.12 | 80.31 | 101.26 | |
| 14 | 0.78 | 3.08 | 6.94 | 12.26 | 19.02 | 26.67 | 36.88 | 48.41 | 60.08 | 77.17 | 93.49 | |
| 14.5 | 0.76 | 2.99 | 6.45 | 11.63 | 18.28 | 27.23 | 35.99 | 46.33 | 59.58 | 71.94 | 85.61 | |
| 15 | 0.71 | 2.79 | 5.87 | 11.31 | 17.57 | 24.47 | 33.31 | 43.37 | 54.64 | 67.50 | 85.45 | |
| 15.5 | 0.63 | 2.60 | 5.90 | 10.65 | 16.56 | 23.11 | 31.01 | 41.15 | 52.50 | 64.03 | 81.20 | |
| 16 | 0.62 | 2.48 | 5.61 | 9.86 | 15.24 | 21.57 | 30.07 | 38.68 | 50.43 | 61.03 | 75.98 | |
| 16.5 | 0.58 | 2.34 | 5.16 | 9.37 | 14.44 | 21.24 | 28.71 | 35.97 | 47.20 | 58.19 | 70.08 | |
| Energy (MWh/yr.) | Δ Base Energy | Mean Power Matrix Bin Variation | Std. Deviation Power Matrix Bin Variation | Capture Width Ratio (CWR) | |
|---|---|---|---|---|---|
| Base | 234.11 | N/A | N/A | N/A | 10.03% |
| Extreme | 263.85 | 12.70% | 13.90% | 6.20% | 11.31% |
| Mild | 242.88 | 3.74% | 3.80% | 2.10% | 10.41% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maria-Arenas, A.; Garrido, A.J.; Garrido, I. Enhancing Wave Energy Converters: Dynamic Inertia Strategies for Efficiency Improvement. J. Mar. Sci. Eng. 2024, 12, 1285. https://doi.org/10.3390/jmse12081285
Maria-Arenas A, Garrido AJ, Garrido I. Enhancing Wave Energy Converters: Dynamic Inertia Strategies for Efficiency Improvement. Journal of Marine Science and Engineering. 2024; 12(8):1285. https://doi.org/10.3390/jmse12081285
Chicago/Turabian StyleMaria-Arenas, Aleix, Aitor J. Garrido, and Izaskun Garrido. 2024. "Enhancing Wave Energy Converters: Dynamic Inertia Strategies for Efficiency Improvement" Journal of Marine Science and Engineering 12, no. 8: 1285. https://doi.org/10.3390/jmse12081285