
Prescribed-Time Trajectory Tracking Control for Unmanned Surface Vessels with Prescribed Performance Considering Marine Environmental Interferences and Unmodeled Dynamics

Abstract
:1. Introduction
- (1)
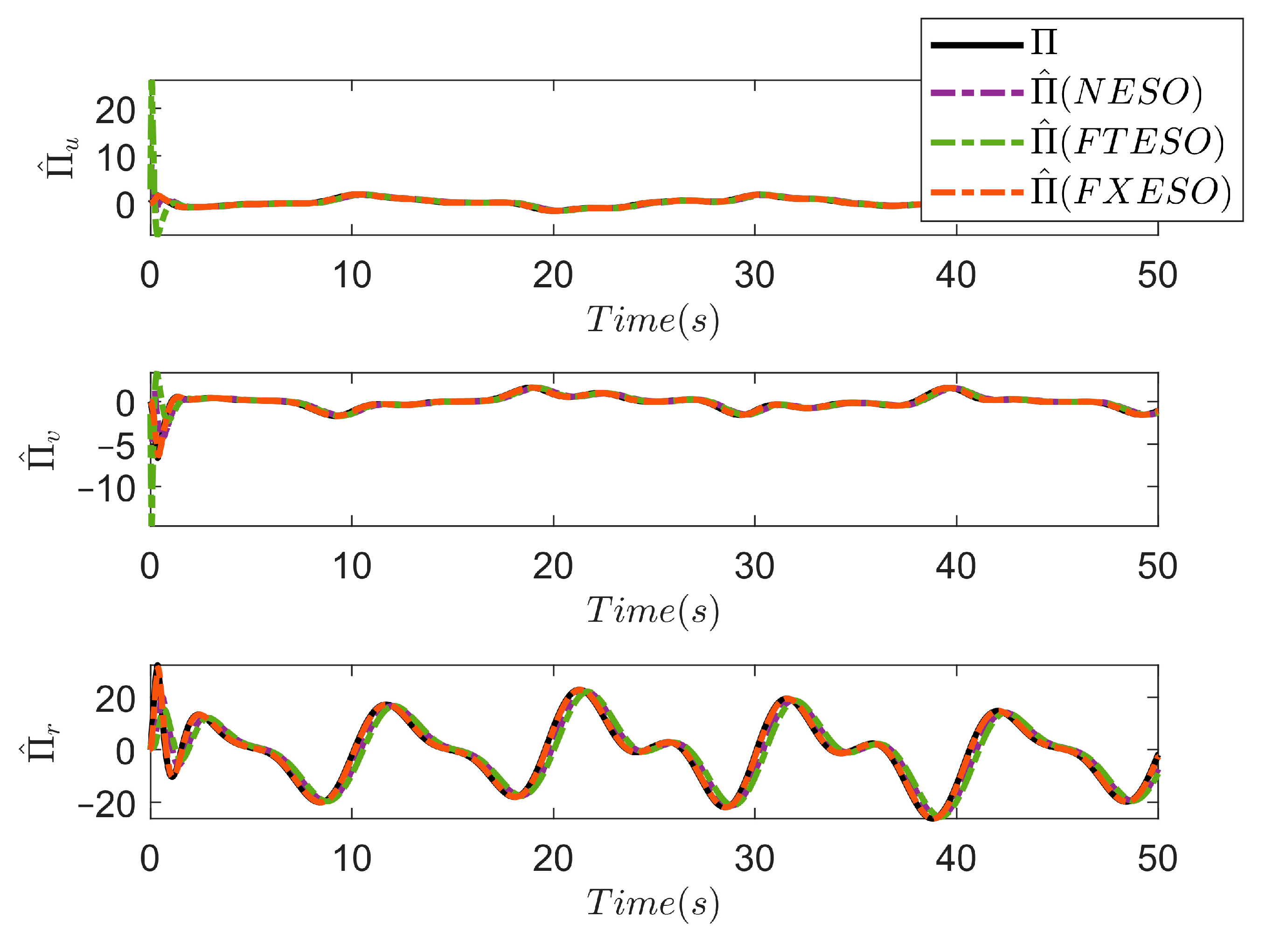
- A fixed-time extended state observer is introduced to obtain the estimations of compound perturbations including marine environmental disturbance and unmodeled dynamics.
- (2)
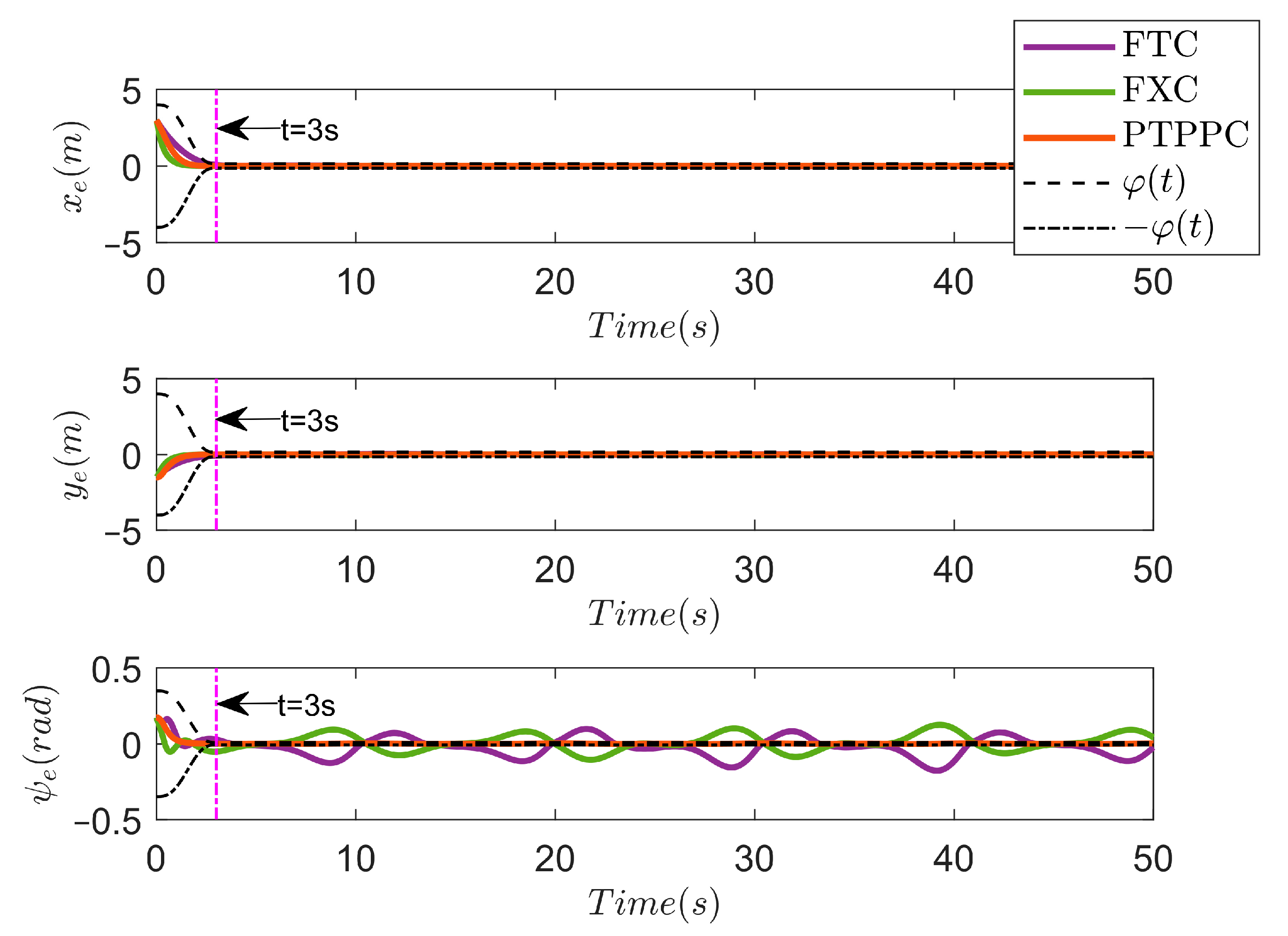
- A prescribed-time prescribed performance function is constructed to obtain guaranteed steady-state performance with a prescribed time.
- (3)
- Combining the extended state observer and prescribed performance constraint, a prescribed-time prescribed performance control strategy is presented to ensure the prescribed-time stability of trajectory tracking errors.
2. Preliminaries
2.1. Lemma and Assumptions
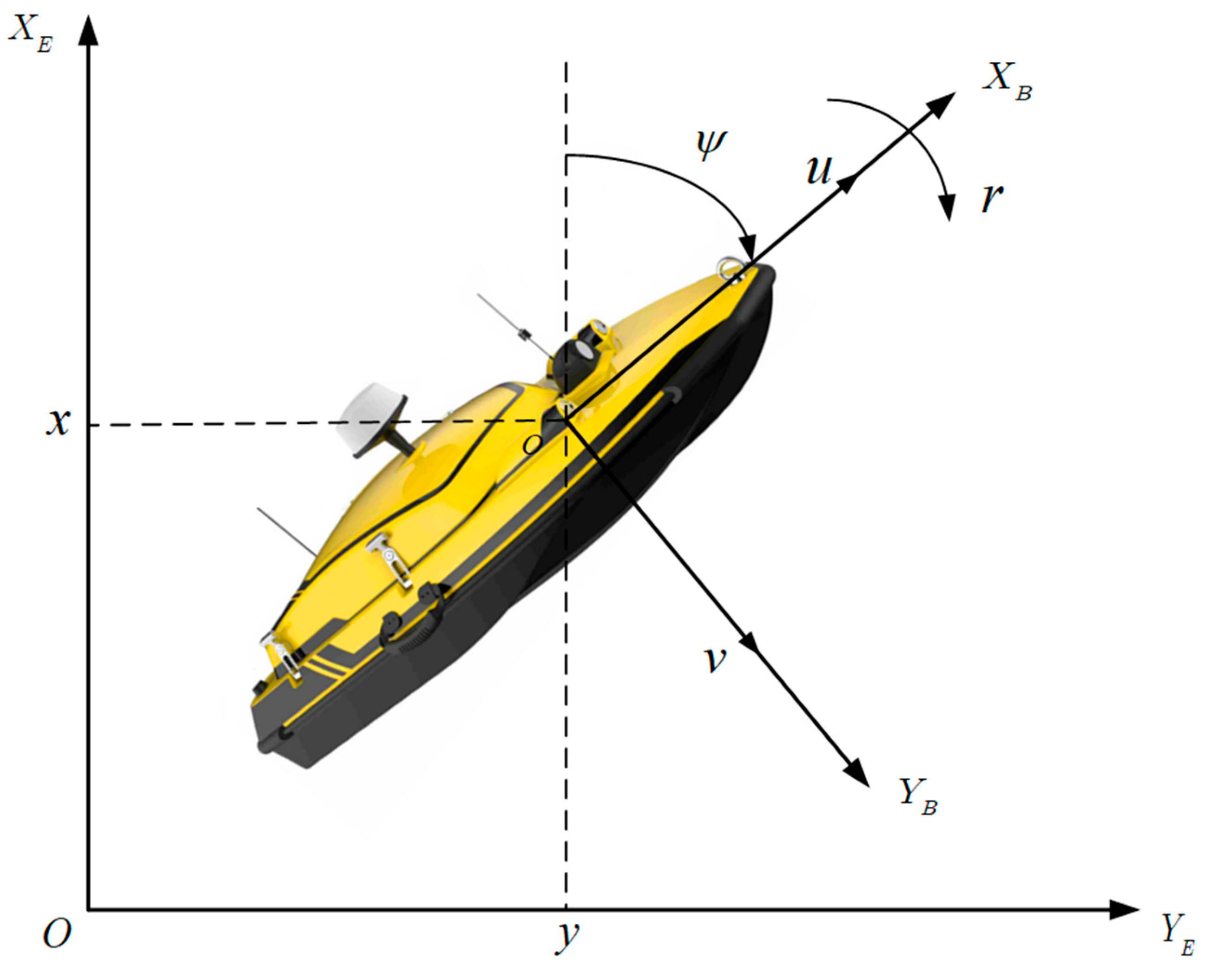
2.2. USV Dynamics
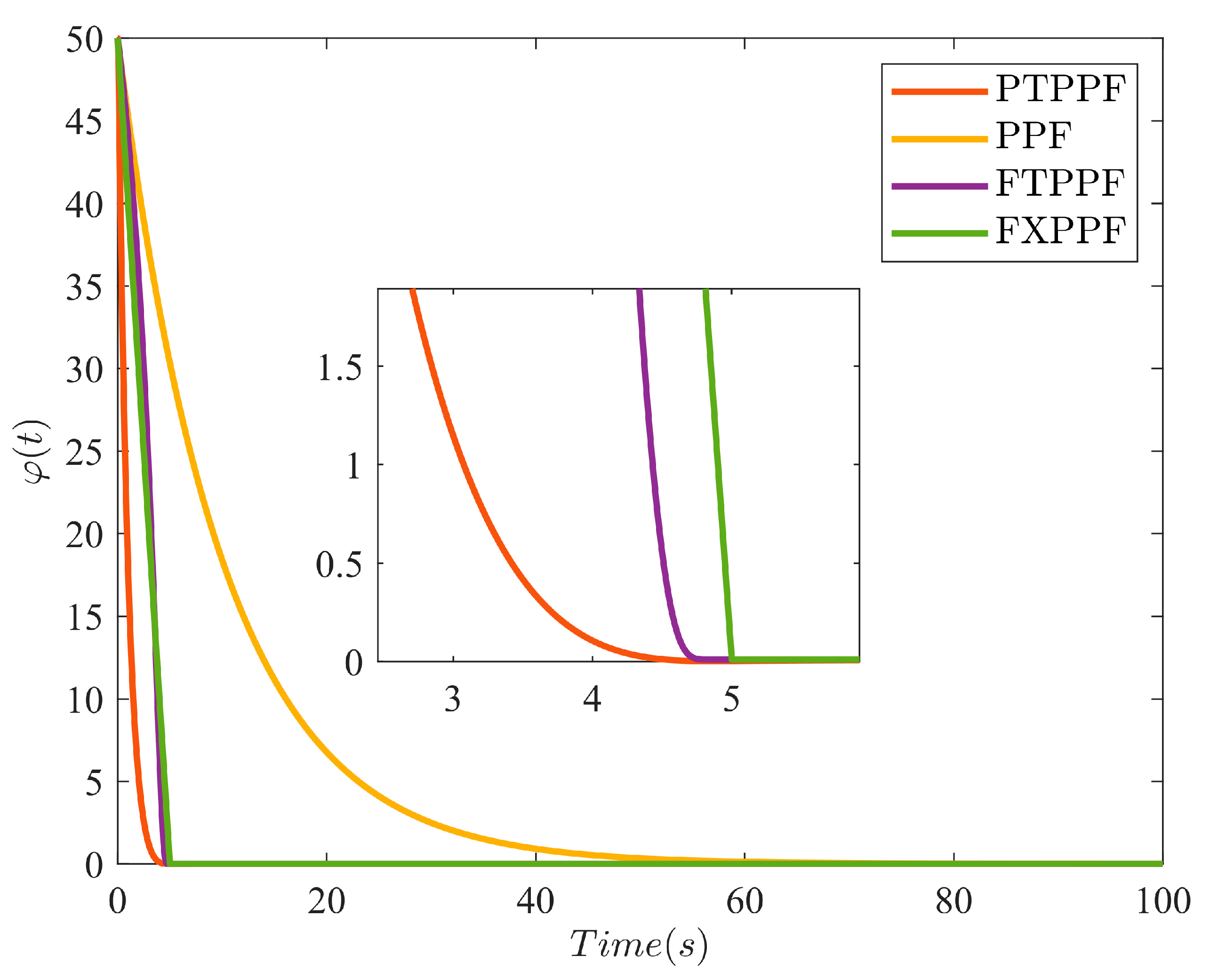
2.3. Prescribed-Time Prescribed Performance Constraint
3. Main Results
3.1. Design of FXESO
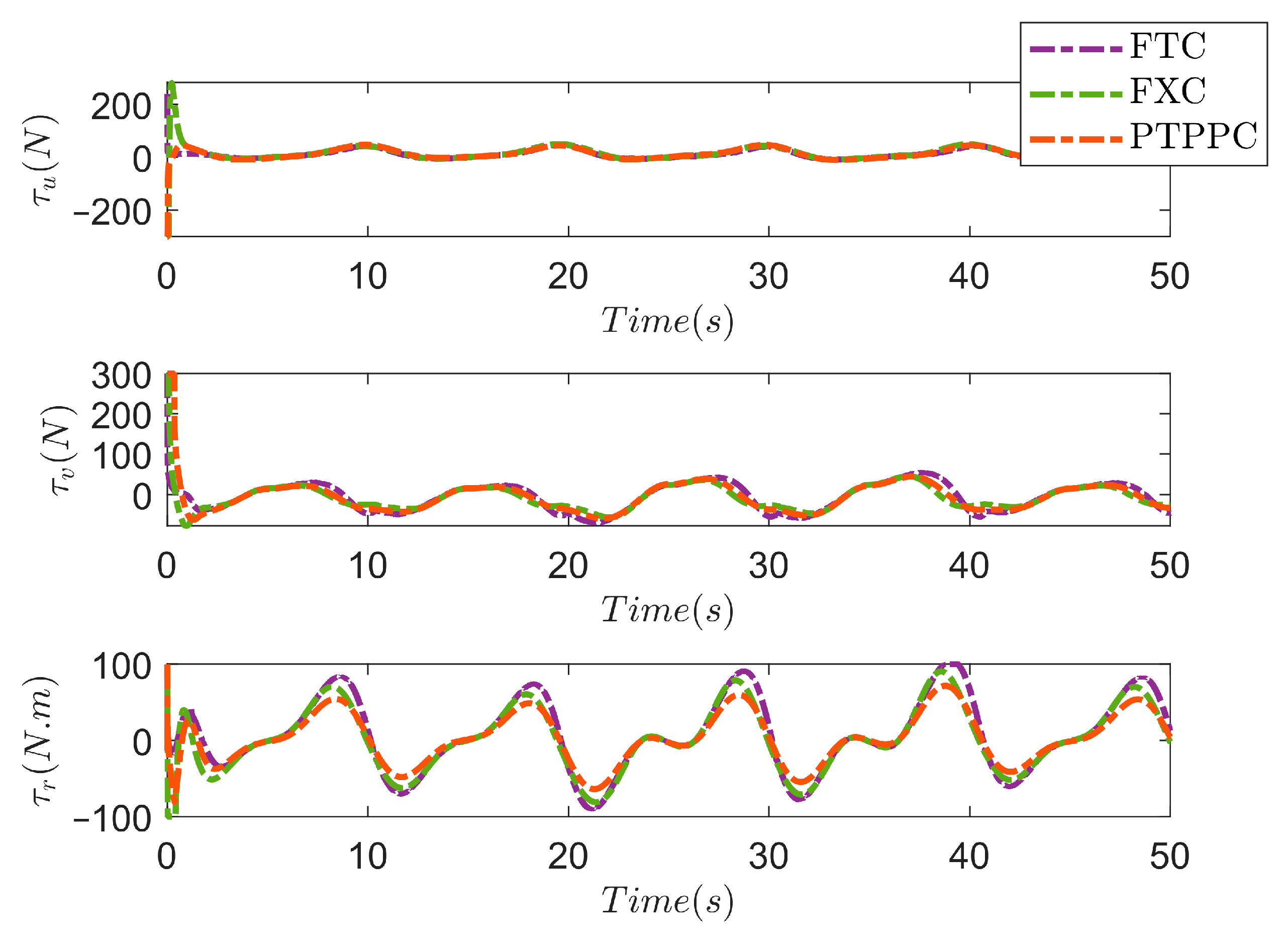
3.2. Controller Design
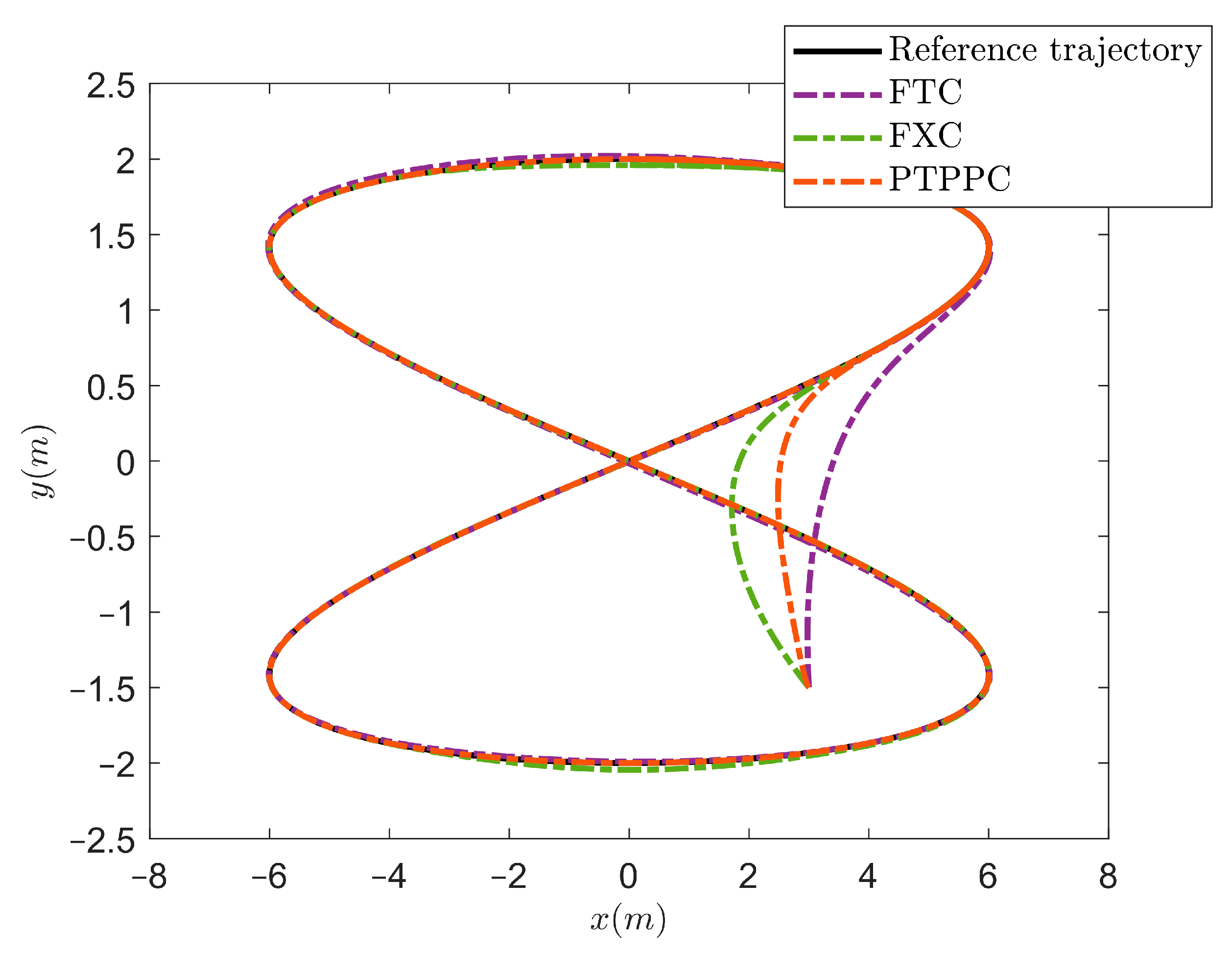
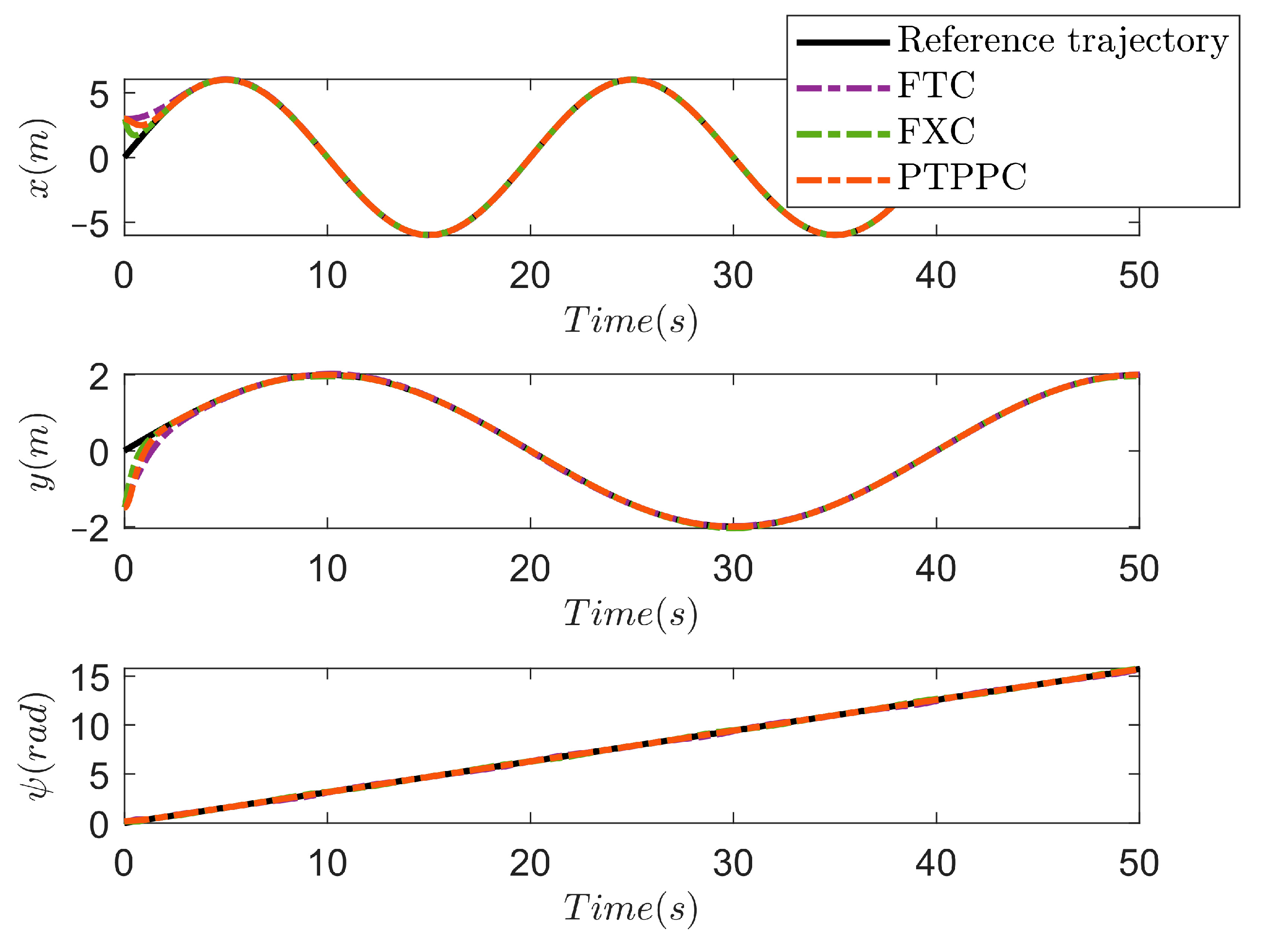
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jin, J.; Liu, D.; Wang, D.; Ma, Y. A practical trajectory tracking scheme for a twin-propeller twin-hull unmanned surface vehicle. J. Mar. Sci. Eng. 2021, 9, 1070. [Google Scholar] [CrossRef]
- Park, B.S.; Kwon, J.W.; Kim, H. Neural network-based output feedback control for reference tracking of underactuated surface vessels. Automatica 2017, 77, 353–359. [Google Scholar] [CrossRef]
- Gao, S.; Peng, Z.; Liu, L.; Wang, D.; Han, Q.-L. Fixed-time resilient edge-triggered estimation and control of surface vehicles for cooperative target tracking under attacks. IEEE Trans. Intell. Veh. 2022, 8, 547–556. [Google Scholar] [CrossRef]
- Song, X.; Wu, C.; Stojanovic, V.; Song, S. 1 bit encoding–decoding-based event-triggered fixed-time adaptive control for unmanned surface vehicle with guaranteed tracking performance. Control Eng. Pract. 2023, 135, 105513. [Google Scholar] [CrossRef]
- Liao, Y.; Zhang, M.; Wan, L.; Li, Y. Trajectory tracking control for underactuated unmanned surface vehicles with dynamic uncertainties. J. Cent. South Univ. 2016, 23, 370–378. [Google Scholar] [CrossRef]
- Dong, Z.; Wan, L.; Li, Y.; Liu, T.; Zhang, G. Trajectory tracking control of underactuated USV based on modified backstepping approach. Int. J. Nav. Archit. Ocean Eng. 2015, 7, 817–832. [Google Scholar] [CrossRef]
- Liu, W.; Ye, H.; Yang, X. Super-twisting sliding mode control for the trajectory tracking of underactuated USVs with disturbances. J. Mar. Sci. Eng. 2023, 11, 636. [Google Scholar] [CrossRef]
- Lei, T.; Wen, Y.; Yu, Y.; Tian, K.; Zhu, M. Predictive trajectory tracking control for the USV in networked environments with communication constraints. Ocean Eng. 2024, 298, 117185. [Google Scholar] [CrossRef]
- Qin, J.; Du, J. Robust adaptive asymptotic trajectory tracking control for underactuated surface vessels subject to unknown dynamics and input saturation. J. Mar. Sci. Technol. 2022, 27, 307–319. [Google Scholar] [CrossRef]
- Qin, H.; Li, C.; Sun, Y. Adaptive neural network-based fault-tolerant trajectory-tracking control of unmanned surface vessels with input saturation and error constraints. IET Intell. Transp. Syst. 2020, 14, 356–363. [Google Scholar] [CrossRef]
- Luo, Q.; Wang, H.; Li, N.; Su, B.; Zheng, W. Model-free predictive trajectory tracking control and obstacle avoidance for unmanned surface vehicle with uncertainty and unknown disturbances via model-free extended state observer. Int. J. Control Autom. Syst. 2024, 22, 1985–1997. [Google Scholar] [CrossRef]
- Zheng, H.; Li, J.; Tian, Z.; Liu, C.; Wu, W. Hybrid physics-learning model based predictive control for trajectory tracking of unmanned surface vehicles. IEEE Trans. Intell. Transp. Syst. 2024. [Google Scholar] [CrossRef]
- Qiu, B.; Wang, G.; Fan, Y.; Mu, D.; Sun, X. Adaptive sliding mode trajectory tracking control for unmanned surface vehicle with modeling uncertainties and input saturation. Appl. Sci. 2019, 9, 1240. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, M.; Xu, J. Robust adaptive sliding mode control of underactuated autonomous underwater vehicles with uncertain dynamics. Ocean Eng. 2019, 173, 802–809. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y.; Qiu, B.; Sun, X. Adaptive course control based on trajectory linearization control for unmanned surface vehicle with unmodeled dynamics and input saturation. Neurocomputing 2019, 330, 1–10. [Google Scholar] [CrossRef]
- Esfahani, H.N.; Szlapczynski, R. Model predictive super-twisting sliding mode control for an autonomous surface vehicle. Pol. Marit. Res. 2019, 26, 163–171. [Google Scholar] [CrossRef]
- Wang, N.; Gao, Y.; Yang, C.; Zhang, X. Reinforcement learning-based finite-time tracking control of an unknown unmanned surface vehicle with input constraints. Neurocomputing 2022, 484, 26–37. [Google Scholar] [CrossRef]
- Xu, D.; Liu, Z.; Song, J.; Zhou, X. Finite time trajectory tracking with full-state feedback of underactuated unmanned surface vessel based on nonsingular fast terminal sliding mode. J. Mar. Sci. Eng. 2022, 10, 1845. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, D.; Zhao, M.; Xie, S. Finite-time tracking control of underactuated surface vehicle with tracking error constraints. Int. J. Veh. Des. 2020, 1, 84. [Google Scholar] [CrossRef]
- Zhang, L.; Zheng, Y.; Huang, B.; Su, Y. Finite-time trajectory tracking control for under-actuated unmanned surface vessels with saturation constraint. Ocean Eng. 2022, 249, 110745. [Google Scholar] [CrossRef]
- Chen, Q.; Zhao, Y.; Wen, G.; Shi, G.; Yu, X. Fixed-time cooperative tracking control for double-integrator multiagent systems: A time-based generator approach. IEEE Trans. Cybern. 2022, 53, 5970–5983. [Google Scholar] [CrossRef] [PubMed]
- Zou, Q.; Chang, S. A new fixed-time terminal sliding mode control for second-order nonlinear systems. J. Frankl. Inst. 2024, 361, 1255–1267. [Google Scholar] [CrossRef]
- Yao, Q. Fixed-time trajectory tracking control for unmanned surface vessels in the presence of model uncertainties and external disturbances. Int. J. Control 2022, 95, 1133–1143. [Google Scholar] [CrossRef]
- Sui, B.; Zhang, J.; Liu, Z.; Wei, J. Fixed-Time Trajectory Tracking Control of Fully Actuated Unmanned Surface Vessels with Error Constraints. J. Mar. Sci. Eng. 2024, 12, 584. [Google Scholar] [CrossRef]
- Song, Y.; Wang, Y.; Holloway, J.; Krstic, M. Time-varying feedback for regulation of normal-form nonlinear systems in prescribed finite time. Automatica 2017, 83, 243–251. [Google Scholar] [CrossRef]
- Li, Y.; He, J.; Shen, H.; Zhang, W.; Li, Y. Adaptive practical prescribed-time fault-tolerant control for autonomous underwater vehicles trajectory tracking. Ocean Eng. 2023, 277, 114263. [Google Scholar] [CrossRef]
- Li, J.; Xiang, X.; Dong, D.; Yang, S. Prescribed time observer-based trajectory tracking control of autonomous underwater vehicle with tracking error constraints. Ocean Eng. 2023, 274, 114018. [Google Scholar] [CrossRef]
- Cao, Y.; Song, Y. Practical prescribed time tracking control with user pre-determinable precision for uncertain nonlinear systems. In Proceedings of the 2020 59th IEEE Conference on Decision and Control (CDC), Jeju Island, Republic of Korea, 14–18 December 2020; pp. 3526–3530. [Google Scholar]
- Wang, T.; Liu, Y.; Zhang, X. Extended state observer-based fixed-time trajectory tracking control of autonomous surface vessels with uncertainties and output constraints. ISA Trans. 2022, 128, 174–183. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Dai, D.; Peng, Z.; Tuo, Y. Prescribed-time prescribed performance-based distributed formation control of surface vessels with system uncertainties. Ocean Eng. 2024, 295, 116930. [Google Scholar] [CrossRef]
- Aguilar-Ibanez, C.; Suarez-Castanon, M.S.; García-Canseco, E.; Rubio, J.d.J.; Barron-Fernandez, R.; Martinez, J.C. Trajectory Tracking Control of an Autonomous Vessel in the Presence of Unknown Dynamics and Disturbances. Mathematics 2024, 12, 2239. [Google Scholar] [CrossRef]
- Hu, Q.; Shao, X.; Chen, W.H. Robust fault-tolerant tracking control for spacecraft proximity operations using time-varying sliding mode. IEEE Trans. Aerosp. Electron. Syst. 2017, 54, 2–17. [Google Scholar] [CrossRef]
- Wang, Y.; Qu, Y.; Zhao, S.; Fu, H. Adaptive neural containment maneuvering of underactuated surface vehicles with prescribed performance and collision avoidance. Ocean Eng. 2024, 297, 116779. [Google Scholar] [CrossRef]
- Wang, S.; Dai, D.; Wang, D.; Tuo, Y. Nonlinear Extended State Observer-Based Distributed Formation Control of Multiple Vessels with Finite-Time Prescribed Performance. J. Mar. Sci. Eng. 2023, 11, 321. [Google Scholar] [CrossRef]
- Gao, Z.; Zhang, Y.; Guo, G. Fixed-time prescribed performance adaptive fixed-time sliding mode control for vehicular platoons with actuator saturation. IEEE Trans. Intell. Transp. Syst. 2022, 23, 24176–24189. [Google Scholar] [CrossRef]
- Dong, S.; Shen, Z.; Zhou, L.; Yu, H. Event-triggered trajectory tracking control of marine surface vessels with time-varying output constraints using barrier functions. Int. J. Control Autom. Syst. 2023, 21, 2708–2717. [Google Scholar] [CrossRef]
- Skjetne, R.; Fossen, T.I.; Kokotović, P.V. Adaptive maneuvering, with experiments, for a model ship in a marine control laboratory. Automatica 2005, 41, 289–298. [Google Scholar] [CrossRef]
- Dai, Y.; Yang, C.; Yu, S.; Mao, Y.; Zhao, Y. Finite-time trajectory tracking for marine vessel by nonsingular backstepping controller with unknown external disturbance. IEEE Access 2019, 7, 165897–165907. [Google Scholar] [CrossRef]
- Gao, Z.; Guo, G. Command-filtered fixed-time trajectory tracking control of surface vehicles based on a disturbance observer. Int. J. Robust Nonlinear Control 2019, 29, 4348–4365. [Google Scholar] [CrossRef]
- Li, S.; Sun, Z.; Ye, D. FTCESO-Based Prescribed Time Control for Satellite Formation Flying. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 5086–5090. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 5 | 0.6 | ||
| 15 | 0.4 | ||
| 35 | 1.25 | ||
| 15 | 1.05 | ||
| 40 | 0.85 | ||
| 55 | |||
| 0.8 |
| Indices | Errors | PTPPC | FXC | FTC |
|---|---|---|---|---|
| 2.058 | 1.849 | 3.724 | ||
| 1.094 | 1.147 | 1.936 | ||
| 0.146 | 2.094 | 2.640 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sui, B.; Liu, Y.; Zhang, J.; Liu, Z.; Zhang, Y. Prescribed-Time Trajectory Tracking Control for Unmanned Surface Vessels with Prescribed Performance Considering Marine Environmental Interferences and Unmodeled Dynamics. J. Mar. Sci. Eng. 2024, 12, 1380. https://doi.org/10.3390/jmse12081380
Sui B, Liu Y, Zhang J, Liu Z, Zhang Y. Prescribed-Time Trajectory Tracking Control for Unmanned Surface Vessels with Prescribed Performance Considering Marine Environmental Interferences and Unmodeled Dynamics. Journal of Marine Science and Engineering. 2024; 12(8):1380. https://doi.org/10.3390/jmse12081380
Chicago/Turabian StyleSui, Bowen, Yiping Liu, Jianqiang Zhang, Zhong Liu, and Yuanyuan Zhang. 2024. "Prescribed-Time Trajectory Tracking Control for Unmanned Surface Vessels with Prescribed Performance Considering Marine Environmental Interferences and Unmodeled Dynamics" Journal of Marine Science and Engineering 12, no. 8: 1380. https://doi.org/10.3390/jmse12081380