
Comparative Study on the Performances of a Hinged Flap-Type Wave Energy Converter Considering Both Fixed and Floating Bases

 ,
, 

Abstract
1. Introduction
2. Mathematical Modeling
2.1. Frequency Domain Hydrodynamics
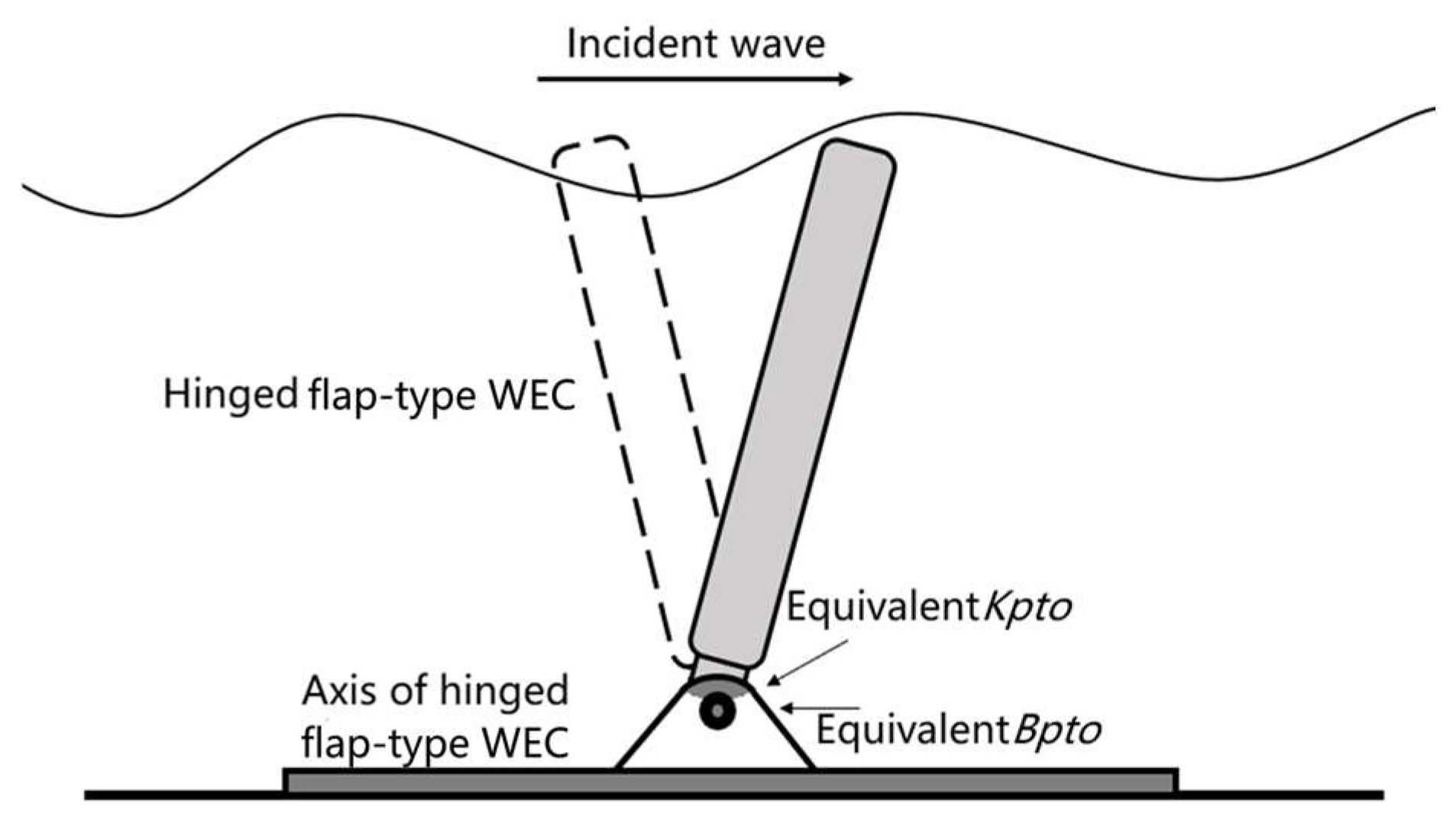
2.2. Hinged Motion of Floating Multi-Body Geometries
2.3. WEC Power Generation Evaluation
3. Hydrodynamic Modeling and Analysis
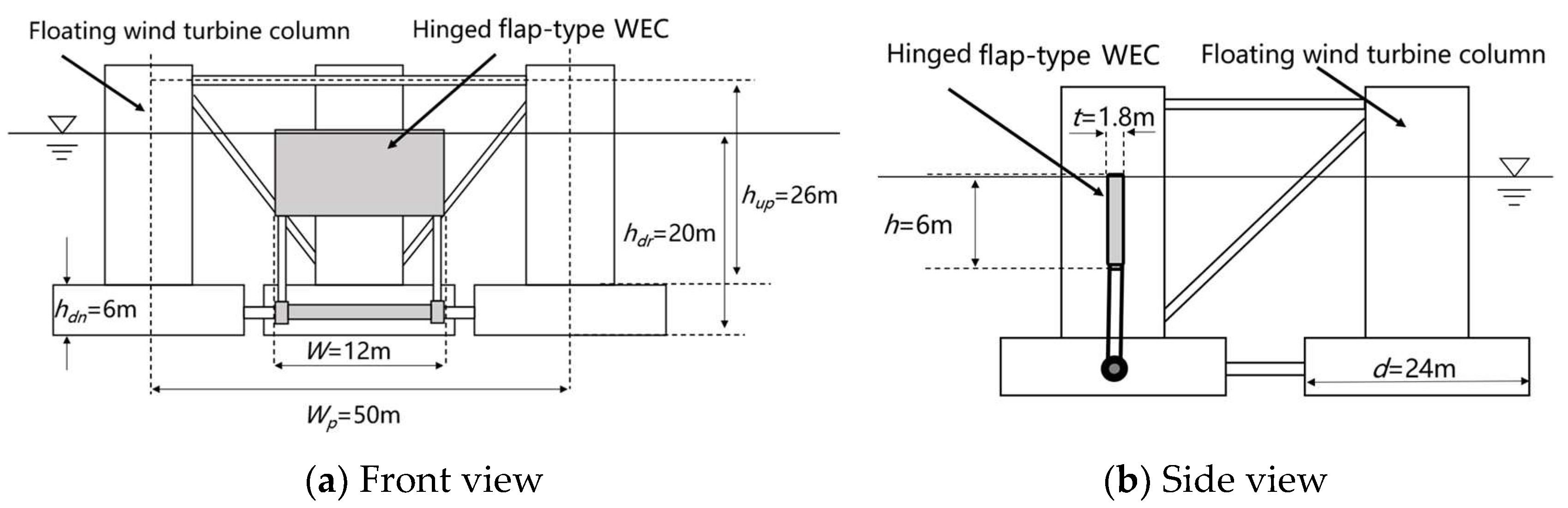
3.1. WEC and Multi-Body Geometries
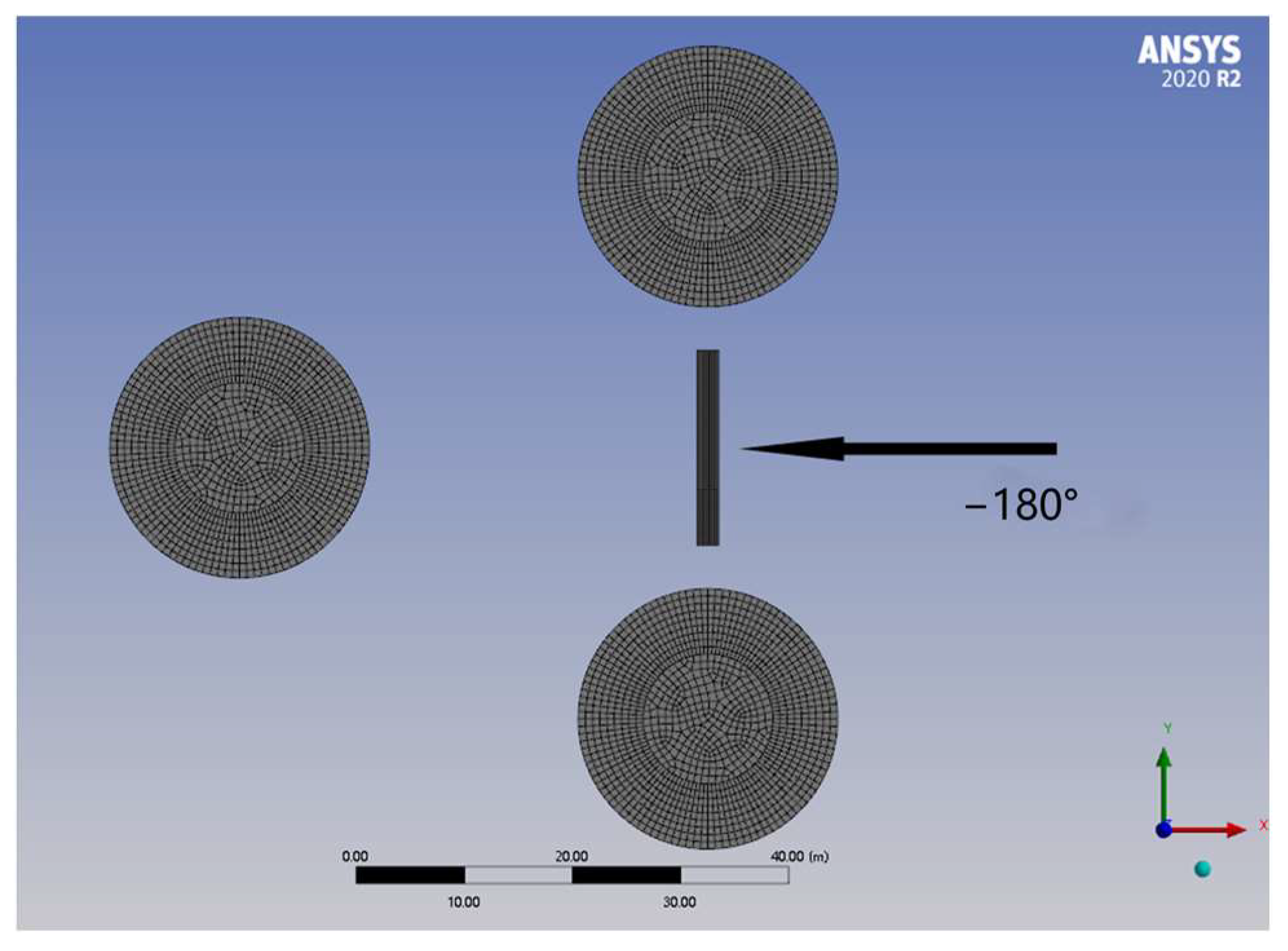
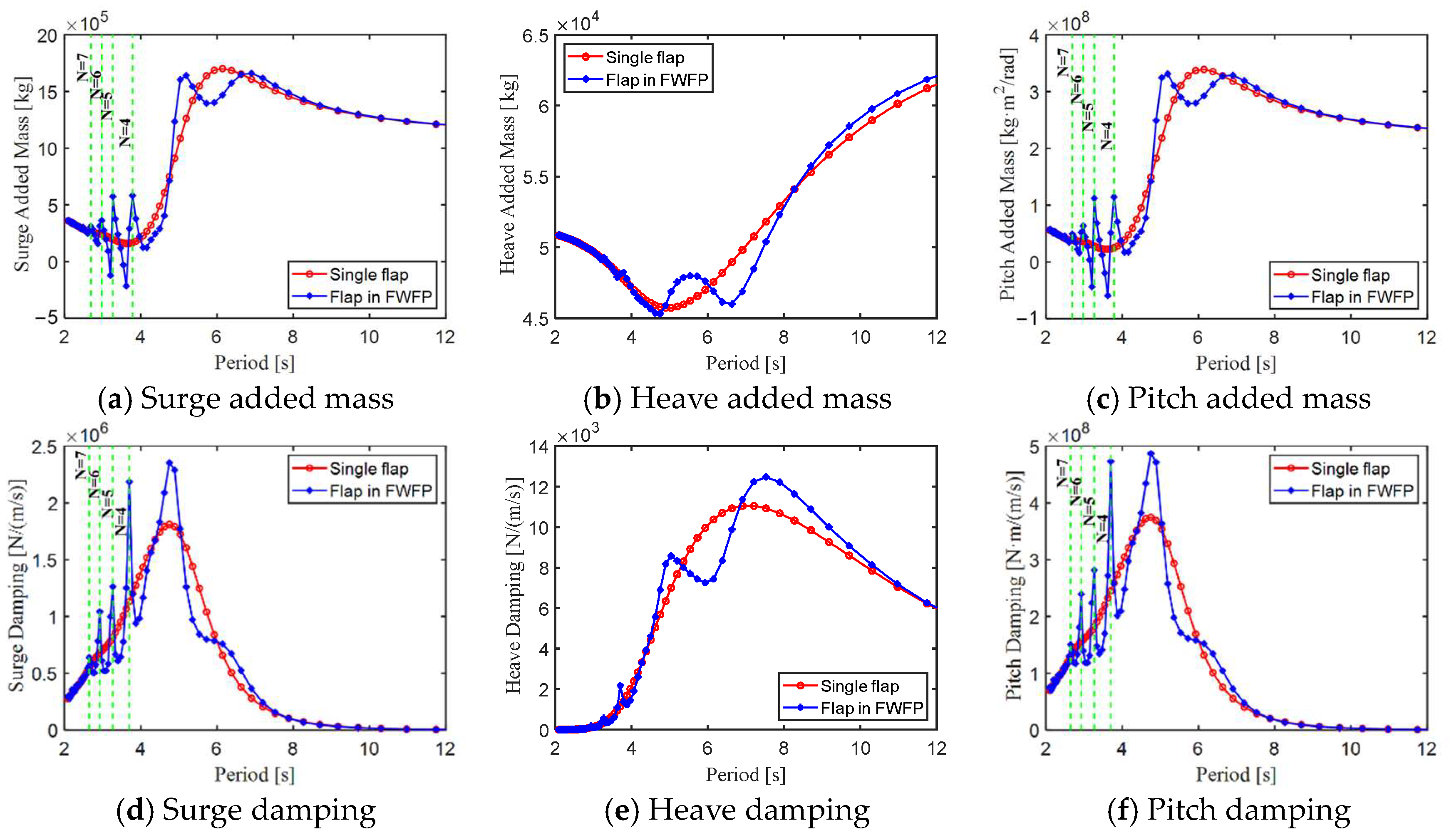
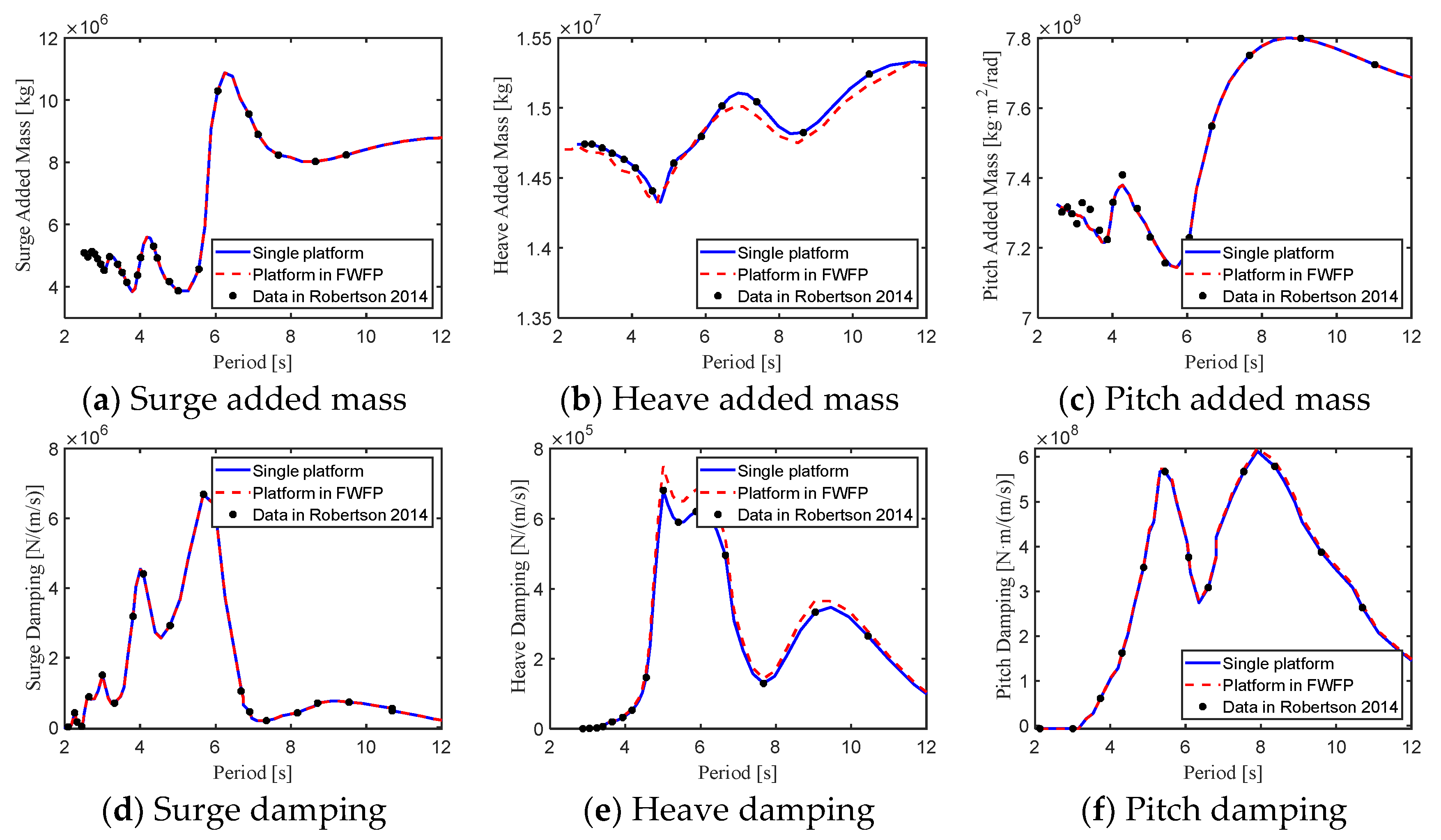
3.2. Multi-Body Hydrodynamic Analysis
4. Power Optimization Based on the Frequency Domain Model
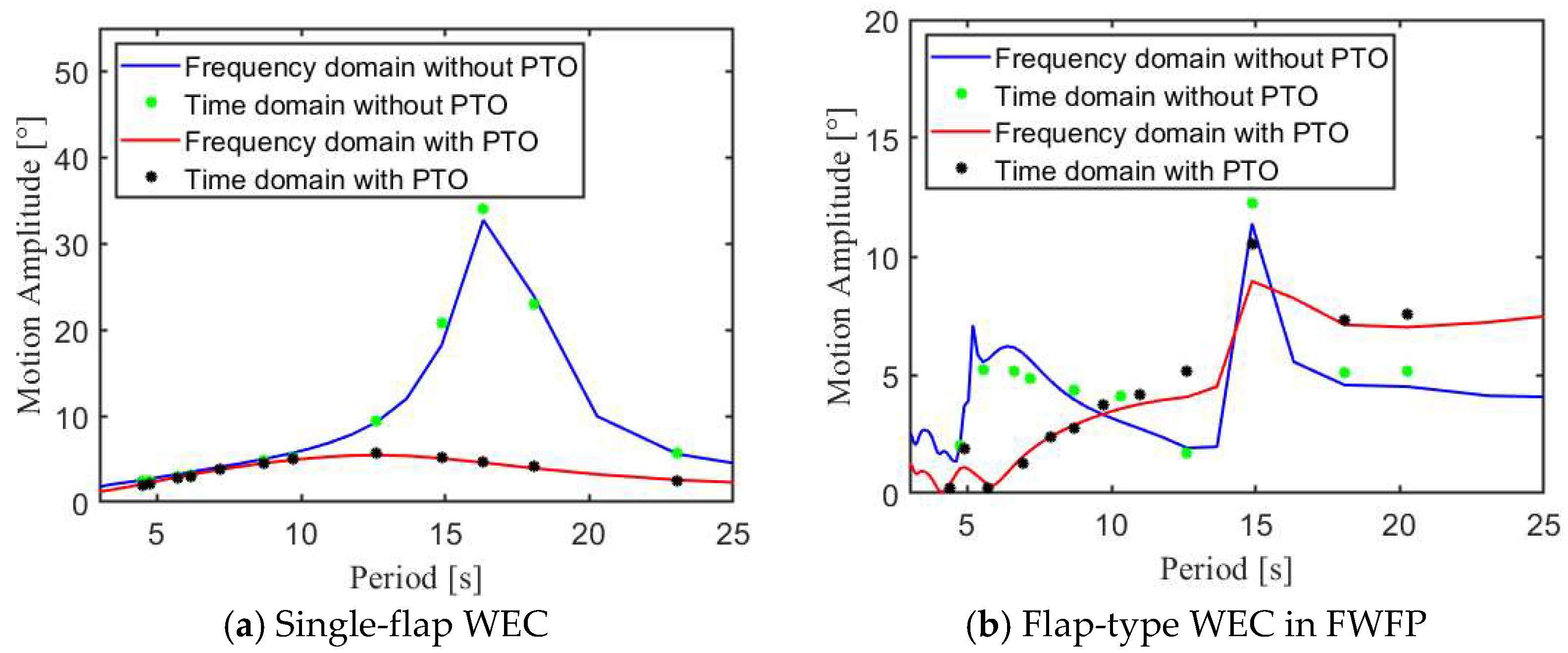
4.1. Verification of the Multi-Body Formulation
4.2. Natural Period Optimization
4.3. Optimal Damping Optimization
4.4. Comparative Optimization of Power Generation
4.5. Wave Absorbed Power Optimization
5. Conclusions
- (1)
- The effects of hydrodynamic interaction in the hybrid configuration can be neglected for the floating platform. It has a great influence on the flap-type WEC; the resonant behavior is small in the mode of heave but much more significant in the modes of surge and pitch, especially at high frequencies. Even if the gap between the two floating bodies considered is not a regular rectangle, the resonant modes in Equation (5) and the observed resonance frequencies are still consistent at the high frequency.
- (2)
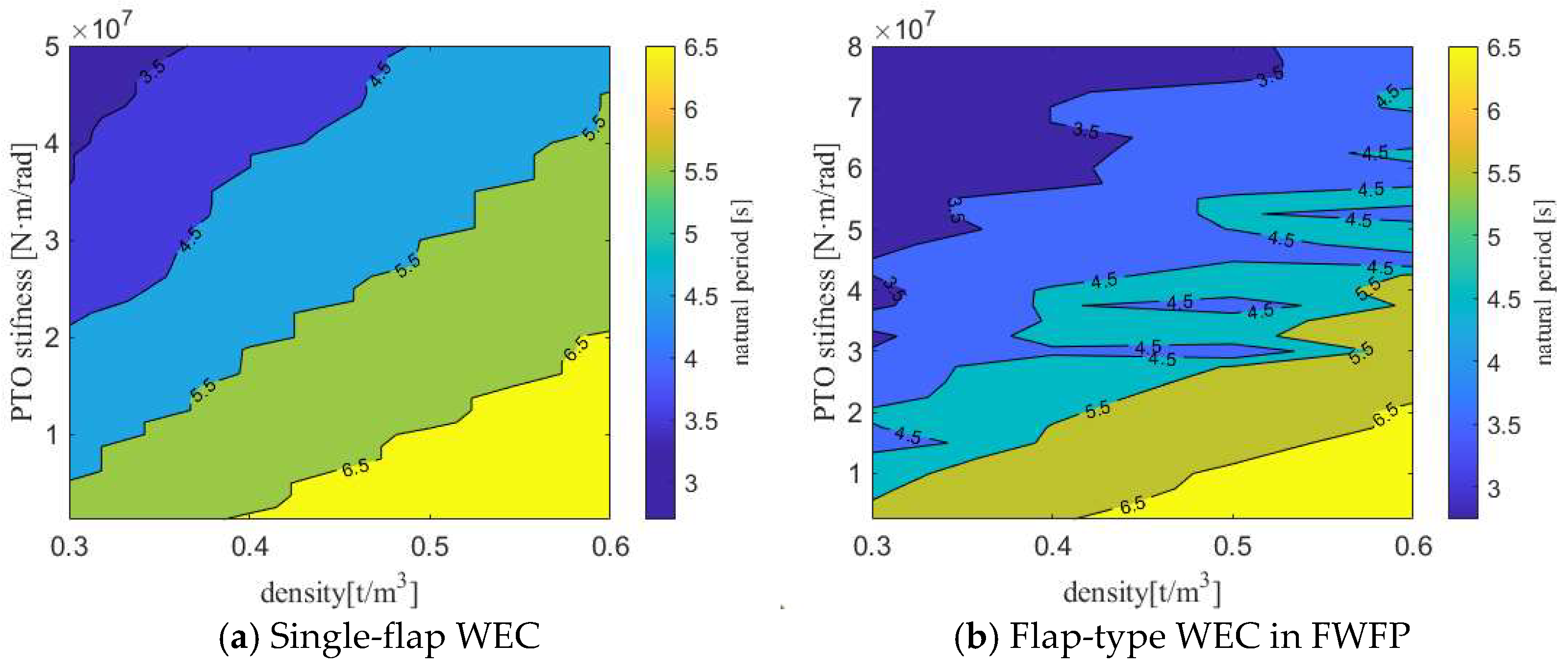
- With an increase in density, the natural period of the flap-type WEC increases for both single-flap and FWFP configurations. The natural frequencies also increase with Kpto. The observed trends are rather smooth for the single-flap WEC, mainly due to the smooth behavior of the hydrodynamic coefficients of the WEC. The natural frequencies of the flap-type WEC in the FWFP configuration present a similar trend; the natural period of the flap-type WEC when in the FWFP configuration normally relates in a nonlinear way with an increase in the Kpto parameter. However, due to the hydrodynamic interaction between the different floating bodies, WECs’ added mass and damping oscillate at the wave periods around 2~4 s and that is reflected in the natural period of the WEC when modifying the PTO parameters around the same wave periods.
- (3)
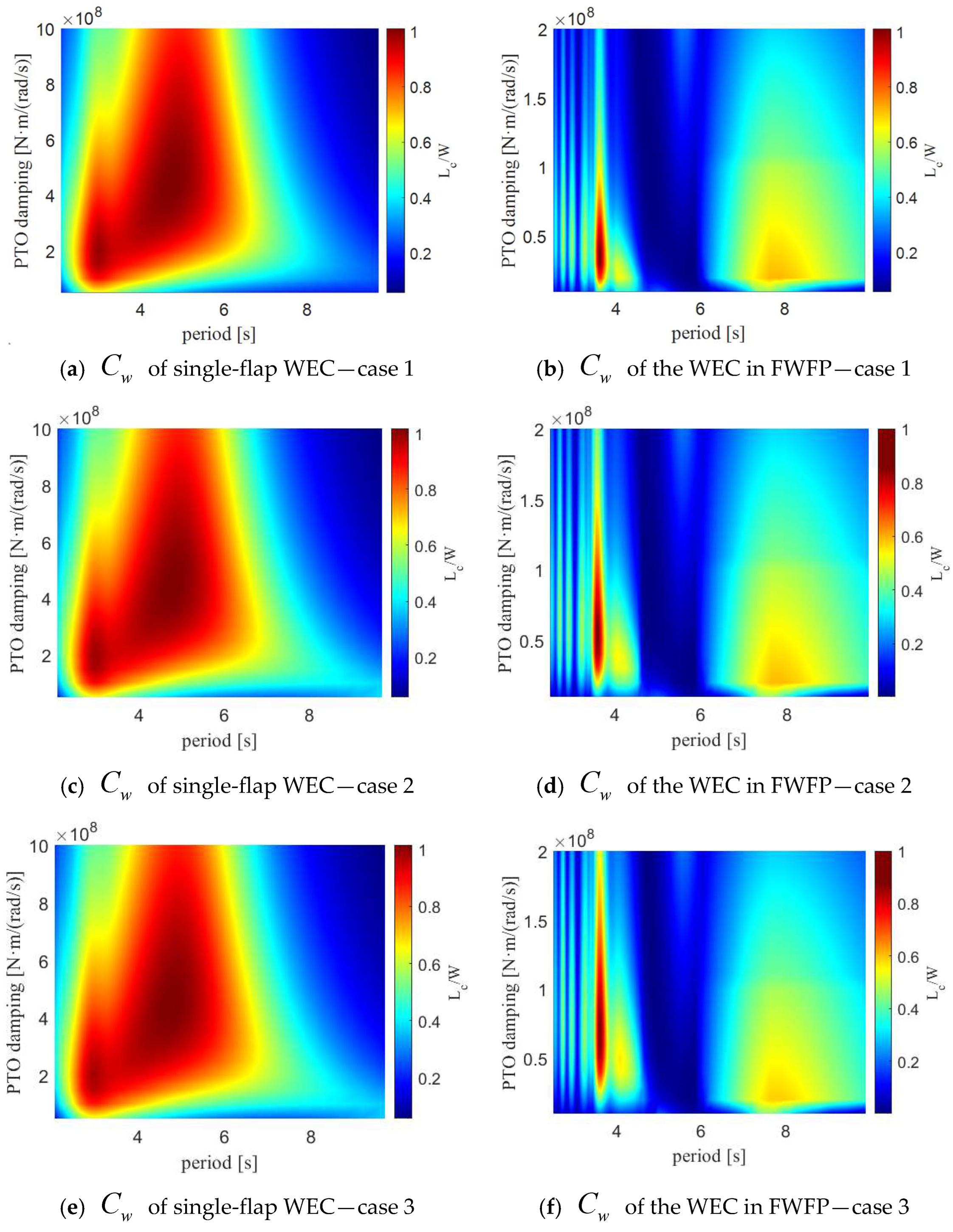
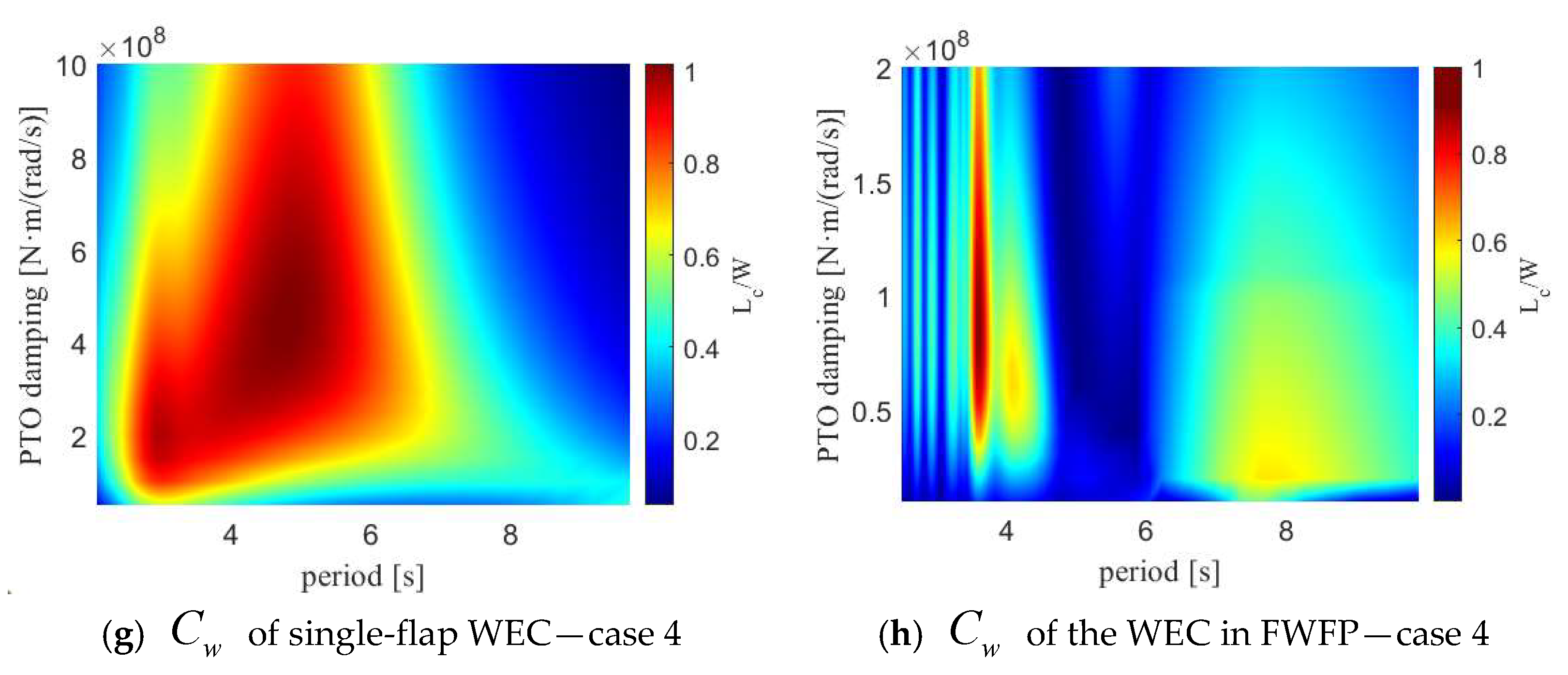
- The flap-type WEC considered in this paper has a high capture width in the range of a 4~6 s wave period. However, after it is combined with the floating platform, there is a main wave frequency where the WEC is capturing a significant amount of wave energy, which is due to the multi-body coupling and shifts the peak of absorbed power to a higher frequency. Due to the influences of the floating platform, the WEC presents a small peak at around a 7~10 s wave period. In addition, under the same Bpto parameters, the higher the WEC density, the higher the capture width at low frequencies.
- (4)
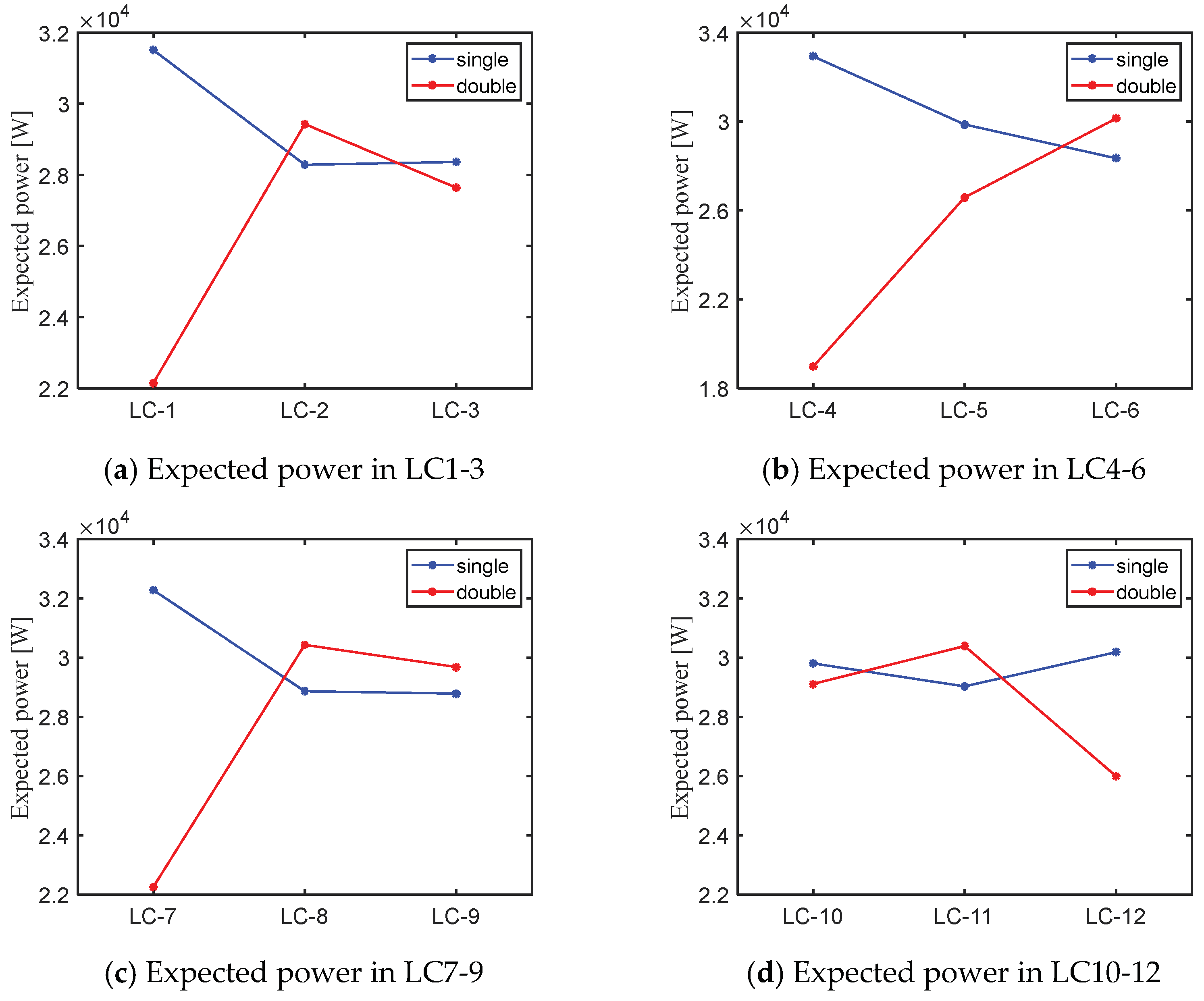
- The parameter optimization results obtained are mostly applicable to the different working conditions considered, for both the natural period optimization and optimal damping method. Although the single-flap WEC and the flap-type WEC in the FWFP present quite different responses in the frequency domain regarding wave power generation, the expected amount of wave absorbed power is actually similar when employed at the same operation site in the South China Sea.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Total velocity potential [-] | Capture width [-] | ||
| Incident potential [-] | The width of the flap-type WEC [m] | ||
| Diffraction potential [-] | Incident wave energy in a unit-width sectional area [W] | ||
| Radiation potential [-] | The acceleration of gravity [m/s2] | ||
| Complex wave excitation force [N] | Wave amplitude [m] | ||
| Added mass coefficient matrix [-] | Wave number [-] | ||
| Radiation damping coefficient matrix [-] | Water depth [m] | ||
| Water density | Incident wave speed [m/s] | ||
| The wet surface of the floating body [m2] | Wave spectral density function [-] | ||
| The gap between two floating bodies [m] | Significant wave height [m] | ||
| The wavelength associated with the resonant mode [-] | Peak enhancement factor [-] | ||
| Frequency domain response amplitude operator matrix [-] | Wave peak period [s] | ||
| Rigid-body mass-inertia matrix [-] | Wave frequency [rad/s] | ||
| Hydrodynamic restoring matrix [-] | Peak shape parameter [-] | ||
| Local coordinate system [-] | Expected power [W] | ||
| Global coordinate system [-] | The occurrence probability of each frequency [-] | ||
| Transpose matrix [-] | The average wave height of each frequency [m] | ||
| ,, | The unit vectors of the local articulation axes with respect to the global axes [-] | Abbreviations | |
| The boundary condition of the constraint matrix [-] | FOWT | Floating offshore wind turbine | |
| Complex wave excitation force matrix [-] | STC | Spar–torus combination | |
| Frequency domain RAO matrix in constrained multi-body configurations [-] | WEC | Wave energy converter | |
| Constraint reaction force/moment matrix acting on the structure at the articulation axes | OWC | Oscillating water column | |
| Total stiffness matrixes [-] | PTO | Power take-off | |
| Equivalent stiffness matrix of the PTO [-] | FWFP | Floating wind-flap platform | |
| Equivalent damping matrix of the PTO [-] | RAO | Response amplitude operator | |
| Frequency domain average power generation [W] | DOF | Degrees of freedom | |
| Natural period [s] | PSD | Power spectrum density | |
| Natural frequency [rad/s] | |||
References
- International Energy Agency. Renewables 2023; International Energy Agency: Paris, France, 2023. [Google Scholar]
- Bashetty, S.; Ozcelik, S. Review on dynamics of offshore floating wind turbine platforms. Energies 2021, 14, 6026. [Google Scholar] [CrossRef]
- GWEC. Global Wind Energy Council (GWEC). Available online: http://www.gwec.net/ (accessed on 4 September 2023).
- Shin, H. Model test of the OC3-Hywind floating offshore wind turbine. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Maui, HI, USA, 19–24 June 2011; ISOPE: Mountain View, CA, USA,, 2011. [Google Scholar]
- Jacobsen, A.; Godvik, M. Influence of wakes and atmospheric stability on the floater responses of the Hywind Scotland wind turbines. Wind Energy 2021, 24, 149–161. [Google Scholar] [CrossRef]
- China Offshore Wind Association. The World’s First Anti-Typhoon Floating Unit Connected to the Grid for Power Generation. Available online: https://www.chinaoffshorewind.cn/html/en/NEWS/DYNAMICS/20211213/265.html (accessed on 8 December 2023).
- People’s Daily Online-China. China’s First Deep-Sea Floating Wind Power Platform “Haiyou Guanlan” Was Successfully Connected to the Grid and Put into Operation. Available online: http://finance.people.com.cn/n1/2023/0520/c1004-32690779.html (accessed on 9 September 2023).
- Xinhua-China. China’s Large Floating Wind Power Platform “Mingyang Tiancheng” Will Be Put into Operation. Available online: http://www.news.cn/tech/20240712/e9035cde01ba46dc9f3994afb99a57e8/c.html (accessed on 12 July 2024).
- Castro-Santos, L.; Martins, E.; Soares, C.G. Cost assessment methodology for combined wind and wave floating offshore renewable energy systems. Renew. Energy 2016, 97, 866–880. [Google Scholar] [CrossRef]
- Laura, C.-S.; Vicente, D.-C. Life-cycle cost analysis of floating offshore wind farms. Renew. Energy 2014, 66, 41–48. [Google Scholar] [CrossRef]
- Slocum, A.; Kluger, J.; Mannai, S. Energy harvesting and storage system stabilized offshore wind turbines. In Proceedings of the 2019 Offshore Energy and Storage Summit (OSES), Brest, France, 10–12 July 2019; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Muliawan, M.J.; Karimirad, M.; Gao, Z.; Moan, T. Extreme responses of a combined spar-type floating wind turbine and floating wave energy converter (STC) system with survival modes. Ocean Eng. 2013, 65, 71–82. [Google Scholar] [CrossRef]
- O’sullivan, K.P. Feasibility of Combined Wind-Wave Energy Platforms. Ph.D. Thesis, University College Cork, Cork, Ireland, 2014. [Google Scholar]
- Zhang, D.; Chen, Z.; Liu, X.; Sun, J.; Yu, H.; Zeng, W.; Ying, Y.; Sun, Y.; Cui, L.; Yang, S.; et al. A coupled numerical framework for hybrid floating offshore wind turbine and oscillating water column wave energy converters. Energy Convers. Manag. 2022, 267, 115933. [Google Scholar] [CrossRef]
- Chen, M.; Xiao, P.; Zhou, H.; Li, C.B.; Zhang, X. Fully coupled analysis of an integrated floating wind-wave power generation platform in operational sea-states. Front. Energy Res. 2022, 10, 931057. [Google Scholar] [CrossRef]
- Chen, M.; Deng, J.; Yang, Y.; Zhou, H.; Tao, T.; Liu, S.; Sun, L.; Hua, L. Performance analysis of a floating wind–wave power generation platform based on the frequency domain model. J. Mar. Sci. Eng. 2024, 12, 206. [Google Scholar] [CrossRef]
- Ren, N.; Ma, Z.; Shan, B.; Ning, D.; Ou, J. Experimental and numerical study of dynamic responses of a new combined TLP type floating wind turbine and a wave energy converter under operational conditions. Renew. Energy 2020, 151, 966–974. [Google Scholar] [CrossRef]
- Tian, W.; Wang, Y.; Shi, W.; Michailides, C.; Wan, L.; Chen, M. Numerical study of hydrodynamic responses for a combined concept of semisubmersible wind turbine and different layouts of a wave energy converter. Ocean Eng. 2023, 272, 113824. [Google Scholar] [CrossRef]
- Zhao, H.-T.; Sun, Z.-L.; Hao, C.-L.; Shen, J.-F. Numerical modeling on hydrodynamic performance of a bottom-hinged flap wave energy converter. China Ocean Eng. 2013, 27, 73–86. [Google Scholar] [CrossRef]
- Calvário, M.; Gaspar, J.; Kamarlouei, M.; Hallak, T.; Soares, C.G. Oil-hydraulic power take-off concept for an oscillating wave surge converter. Renew. Energy 2020, 159, 1297–1309. [Google Scholar] [CrossRef]
- Michele, S.; Renzi, E. A second-order theory for an array of curved wave energy converters in open sea. J. Fluids Struct. 2019, 88, 315–330. [Google Scholar] [CrossRef]
- Michailides, C.; Luan, C.; Gao, Z.; Moan, T. Effect of flap type wave energy converters on the response of a semi-submersible wind turbine in operational conditions. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, San Francisco, CA, USA, 8–16 June 2014; American Society of Mechanical Engineers: New York, NY, USA, 2014. [Google Scholar]
- Si, Y.; Chen, Z.; Zeng, W.; Sun, J.; Zhang, D.; Ma, X.; Qian, P. The influence of power-take-off control on the dynamic response and power output of combined semi-submersible floating wind turbine and point-absorber wave energy converters. Ocean Eng. 2021, 227, 108835. [Google Scholar] [CrossRef]
- Celesti, M.L.; Paduano, B.; Peña-Sanchez, Y.; Pasta, E.; Faedo, N.; Ringwood, J.V. On the behaviour of a combined wind-wave energy conversion platform under energy-maximising control conditions. In Proceedings of the OCEANS 2023-Limerick, Limerick, Ireland, 5–8 June 2023; IEEE: New York, NY, USA, 2023. [Google Scholar]
- Ma, C.; Bi, C.-W.; Xu, Z.; Zhao, Y.-P. Dynamic behaviors of a hinged multi-body floating aquaculture platform under regular waves. Ocean Eng. 2022, 243, 110278. [Google Scholar] [CrossRef]
- Wang, L.; Ringwood, J.V. Control-informed ballast and geometric optimisation of a three-body hinge-barge wave energy converter using two-layer optimisation. Renew. Energy 2021, 171, 1159–1170. [Google Scholar] [CrossRef]
- Ren, N.; Zhang, C.; Magee, A.R.; Hellan, Ø.; Dai, J.; Ang, K.K. Hydrodynamic analysis of a modular multi-purpose floating structure system with different outermost connector types. Ocean Eng. 2019, 176, 158–168. [Google Scholar] [CrossRef]
- Chen, M.; Ouyang, M.; Guo, H.; Zou, M.; Zhang, C. A coupled hydrodynamic–structural model for flexible interconnected multiple floating bodies. J. Mar. Sci. Eng. 2023, 11, 813. [Google Scholar] [CrossRef]
- Chen, M.; Zou, M.; Zhu, L.; Ouyang, M.; Liang, Q.; Zhao, W. A fully coupled time domain model capturing nonlinear dynamics of float-over deck installation. Ocean Eng. 2024, 293, 116721. [Google Scholar] [CrossRef]
- Zhang, X.; Li, B.; Hu, Z.; Deng, J.; Xiao, P.; Chen, M. Research on size optimization of wave energy converters based on a floating wind-wave combined power generation platform. Energies 2022, 15, 8681. [Google Scholar] [CrossRef]
- Folley, M. Numerical Modelling of Wave Energy Converters: State-of-the-Art Techniques for Single Devices and Arrays; Academic Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Lewandowski, E.M. Multi-vessel seakeeping computations with linear potential theory. Ocean Eng. 2008, 35, 1121–1131. [Google Scholar] [CrossRef]
- ANSYS AQWA Users Manual; ANSYS Inc.: Canonsburg, PA, USA, 2019.
- Wen, Y.; Wang, W.; Liu, H.; Mao, L.; Mi, H.; Wang, W.; Zhang, G. A shape optimization method of a specified point absorber wave energy converter for the south china sea. Energies 2018, 11, 2645. [Google Scholar] [CrossRef]
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2014. [Google Scholar]
- Zou, M.; Chen, M.; Zhu, L.; Yun, Q.; Zhao, W.; Liang, Q.; Zhao, Y. Experimental and numerical investigation of gap resonances between side-by-side fixed barges under beam sea excitation. Ocean Eng. 2024, 297, 117150. [Google Scholar] [CrossRef]
- Ruezga, A. Buoy analysis in a point-absorber wave energy converter. IEEE J. Ocean. Eng. 2019, 45, 472–479. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, X.; Xiao, L.; Wei, H.; Chen, W. Evaluation of long-term power capture performance of a bistable point absorber wave energy converter in South China Sea. Ocean Eng. 2021, 237, 109338. [Google Scholar] [CrossRef]
- Chen, M.; Jiang, J.; Zhang, W.; Li, C.B.; Zhou, H.; Jiang, Y.; Sun, X. Study on mooring design of 15 MW floating wind turbines in South China Sea. J. Mar. Sci. Eng. 2023, 12, 33. [Google Scholar] [CrossRef]
- Zheng, C.; Zhuang, H.; Li, X.; Li, X. Wind energy and wave energy resources assessment in the East China Sea and South China Sea. Sci. China Technol. Sci. 2012, 55, 163–173. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Designation, Parameter (Unit) | Value |
|---|---|
| Width, W (m) | 12 |
| Height, h (m) | 6 |
| Thickness, t (m) | 1.8 |
| Density, ρ (t/m3) | 0.3/0.4/0.5/0.6 |
| Designation (Unit) | Value |
|---|---|
| Total draft (m) | 20 |
| Elevation of main column above SWL (m) | 10 |
| Elevation of offset column above SWL (m) | 12 |
| Spacing between offset columns (m) | 50 |
| Height of upper columns (m) | 26 |
| Height of base columns (m) | 6 |
| Depth to top of base columns below SWL (m) | 14 |
| Diameter of main column (m) | 6.5 |
| Diameter of offset columns (m) | 12 |
| Diameter of base columns (m) | 24 |
| Displacement of platform (t) | 1.34 × 104 |
| CoG location below SWL (m) | 13.46 |
| Case | Density (t/m3) | Kpto (N·m/rad) | Natural Period of Single-Flap WEC (s) | Natural Period of WEC in FWFP (s) |
|---|---|---|---|---|
| 1 | 0.3 | 2 × 107 | 4.62 | 4.64 |
| 2 | 0.4 | 4 × 107 | 4.56 | 4.64 |
| 3 | 0.5 | 5 × 107 | 4.62 | 4.54 |
| 4 | 0.6 | 6 × 107 | 4.74 | 4.35 |
| Case | Density (t/m3) | Kpto (Nm/rad) | Bpto of Single-Flap WEC (Nm/(rad/s)) | Bpto of WEC in FWFP (Nm/(rad/s)) |
|---|---|---|---|---|
| LC1 | 0.3 | 3 × 107 | 2.5 × 108 | 3.9 × 107 |
| LC2 | 0.3 | 2 × 107 | 3.7 × 108 | 3.4 × 107 |
| LC3 | 0.3 | 1 × 107 | 3.6 × 108 | 3.8 × 107 |
| LC4 | 0.4 | 5 × 107 | 2.4 × 108 | 5.1 × 107 |
| LC5 | 0.4 | 4 × 107 | 3.5 × 108 | 4.9 × 107 |
| LC6 | 0.4 | 3 × 107 | 4.0 × 108 | 4.7 × 107 |
| LC7 | 0.5 | 6 × 107 | 2.8 × 108 | 7.1 × 107 |
| LC8 | 0.5 | 5 × 107 | 4.0 × 108 | 6.8 × 107 |
| LC9 | 0.5 | 4 × 107 | 3.9 × 108 | 6.1 × 107 |
| LC10 | 0.6 | 7 × 107 | 3.8 × 108 | 9.2 × 107 |
| LC11 | 0.6 | 6 × 107 | 4.0 × 108 | 8.5 × 107 |
| LC12 | 0.6 | 5 × 107 | 3.4 × 108 | 4.4 × 107 |
| Wave Average Period (Tav, s) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Significant Wave Height (Hs, m) | 1.5 | 3.5 | 4.5 | 5.5 | 6.5 | 7.5 | 8.5 | 9.5 | 10.5 | 11.5 | 12.5 | |
| 7.5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 6.5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 0.002% | 9 0.014% | 2 0.003% | 0 | |
| 5.5 | 0 | 0 | 0 | 0 | 0 | 0 | 28 0.044% | 54 0.084% | 24 0.037% | 1 0.002% | 0 | |
| 4.5 | 0 | 0 | 0 | 0 | 0 | 50 0.078% | 373 0.581% | 240 0.374% | 37 0.058% | 7 0.011% | 0 | |
| 3.5 | 0 | 0 | 0 | 0 | 163 0.254% | 1317 2.051% | 950 1.480% | 436 0.679% | 84 0.134% | 0 | 0 | |
| 2.5 | 0 | 0 | 0 | 874 1.361% | 4743 7.387% | 2891 4.502% | 1459 2.272% | 546 0.850% | 56 0.084% | 0 | 0 | |
| 1.5 | 0 | 19 0.030% | 3720 5.793% | 9300 14.484% | 5011 7.804% | 2925 4.555% | 1131 1.761% | 149 0.232% | 7 0.011% | 1 0.002% | 0 | |
| 0.5 | 531 0.827% | 4859 17.597% | 11,299 17.597% | 6525 10.162% | 3159 4.920% | 997 1.553% | 189 0.294% | 38 0.059% | 3 0.005% | 2 0.003% | 0 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, M.; Yun, Q.; Hallak, T.S.; Zhou, H.; Zhang, K.; Yang, Y.; Tao, T.; Liu, S.; Jiang, W.; Li, C. Comparative Study on the Performances of a Hinged Flap-Type Wave Energy Converter Considering Both Fixed and Floating Bases. J. Mar. Sci. Eng. 2024, 12, 1416. https://doi.org/10.3390/jmse12081416
Chen M, Yun Q, Hallak TS, Zhou H, Zhang K, Yang Y, Tao T, Liu S, Jiang W, Li C. Comparative Study on the Performances of a Hinged Flap-Type Wave Energy Converter Considering Both Fixed and Floating Bases. Journal of Marine Science and Engineering. 2024; 12(8):1416. https://doi.org/10.3390/jmse12081416
Chicago/Turabian StyleChen, Mingsheng, Qihao Yun, Thiago S. Hallak, Hao Zhou, Kai Zhang, Yi Yang, Tao Tao, Shi Liu, Wei Jiang, and Changjie Li. 2024. "Comparative Study on the Performances of a Hinged Flap-Type Wave Energy Converter Considering Both Fixed and Floating Bases" Journal of Marine Science and Engineering 12, no. 8: 1416. https://doi.org/10.3390/jmse12081416
APA StyleChen, M., Yun, Q., Hallak, T. S., Zhou, H., Zhang, K., Yang, Y., Tao, T., Liu, S., Jiang, W., & Li, C. (2024). Comparative Study on the Performances of a Hinged Flap-Type Wave Energy Converter Considering Both Fixed and Floating Bases. Journal of Marine Science and Engineering, 12(8), 1416. https://doi.org/10.3390/jmse12081416