
Underwater Long Baseline Positioning Based on B-Spline Surface for Fitting Effective Sound Speed Table


Abstract
1. Introduction
2. Basic Principles
2.1. LBL Positioning Model
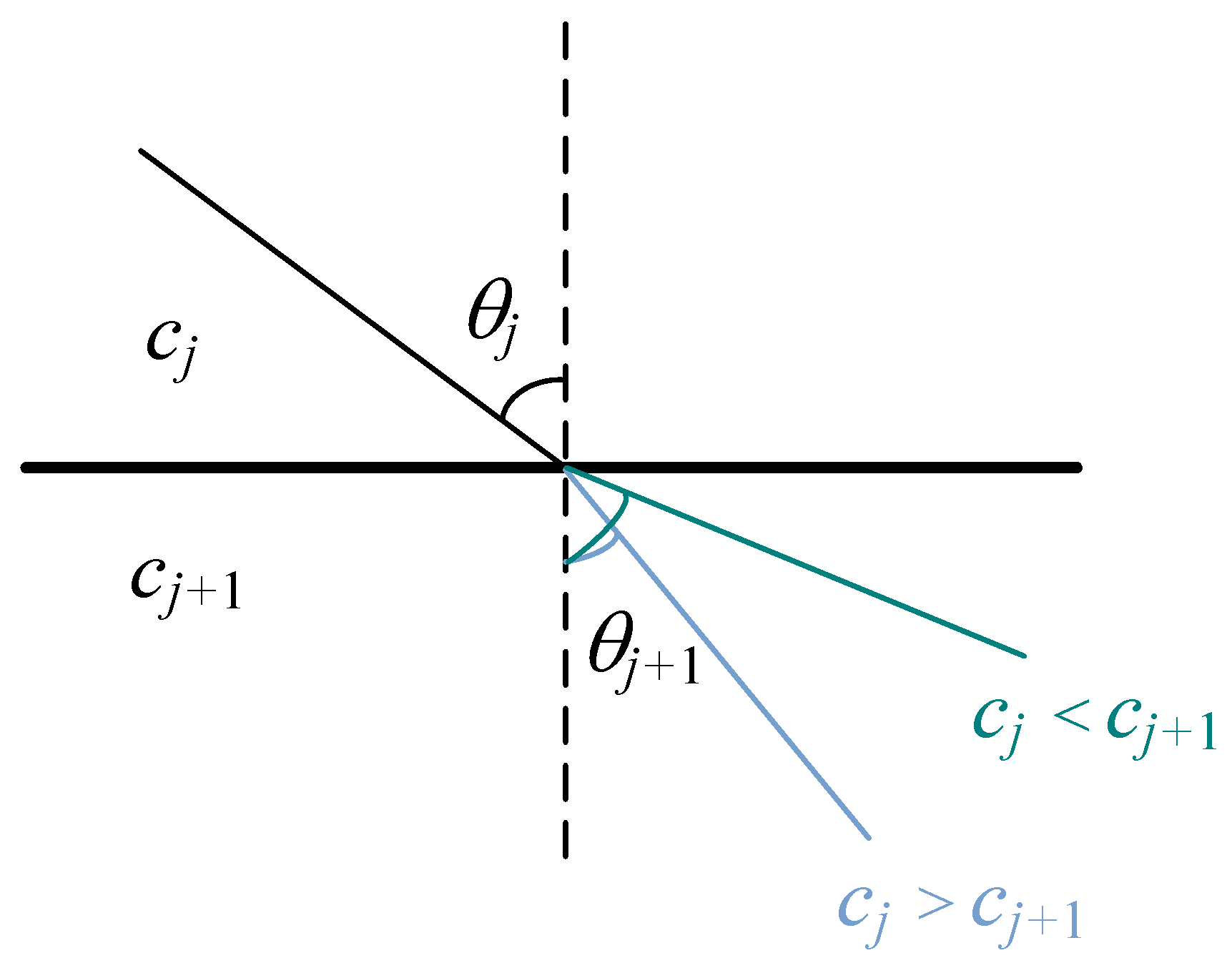
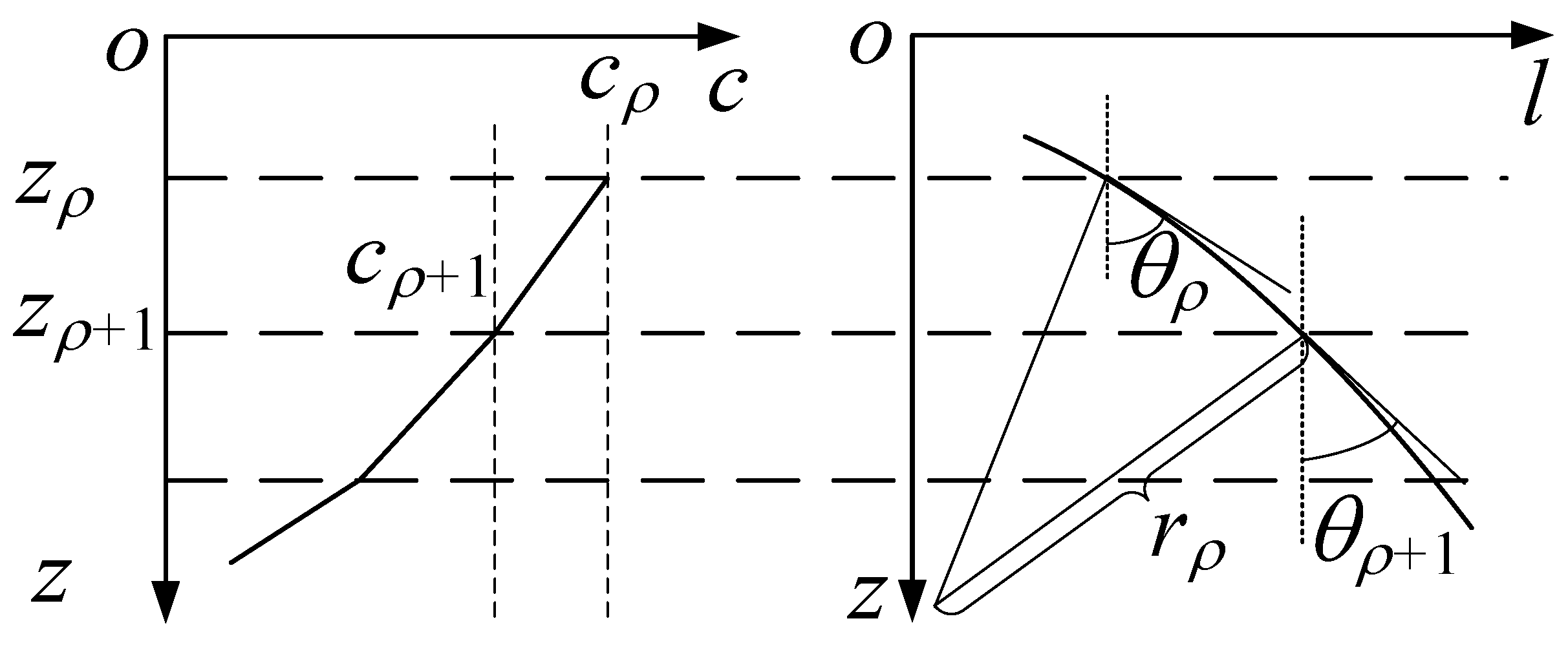
2.2. Construction of ESST Based on Ray Tracking
3. LBL Positioning Method Based on B-Spline Surface for Fitting ESST
3.1. B-Spline Surface Fitting ESST
3.2. Node Position Optimization Based on PSO
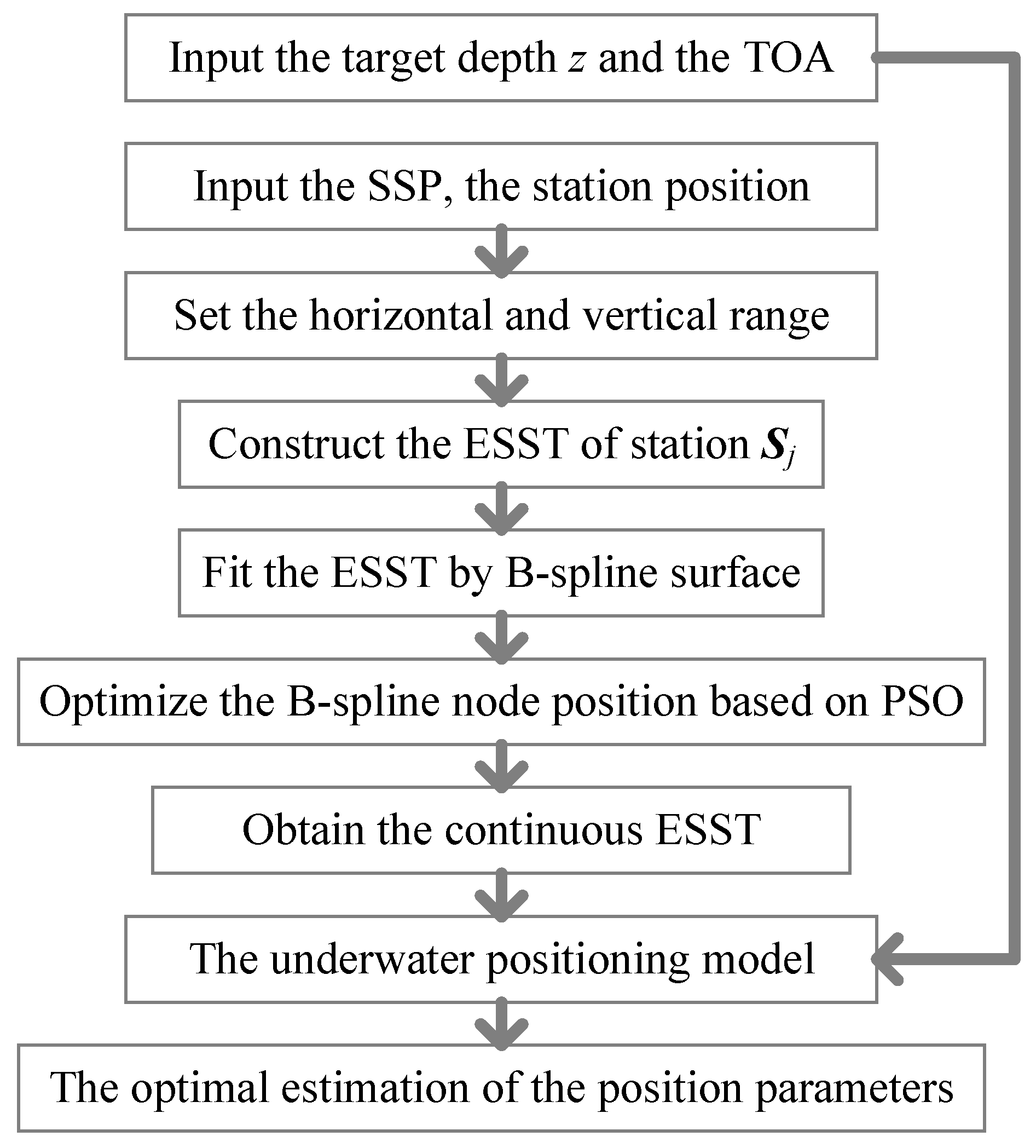
3.3. Improved LBL Positioning Method
4. Numerical Simulation
4.1. Scenario Design
4.2. Simulation Results
- (1)
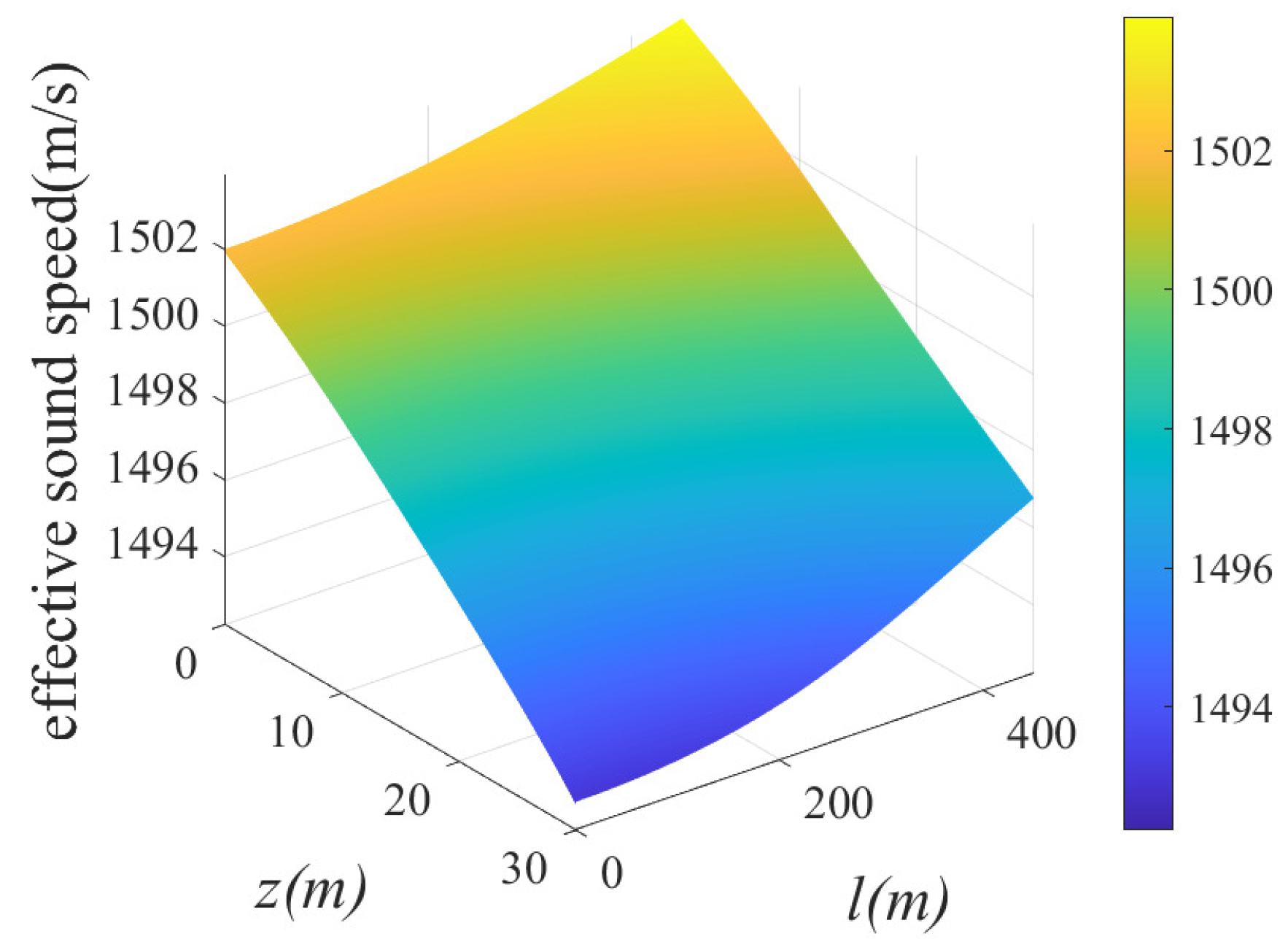
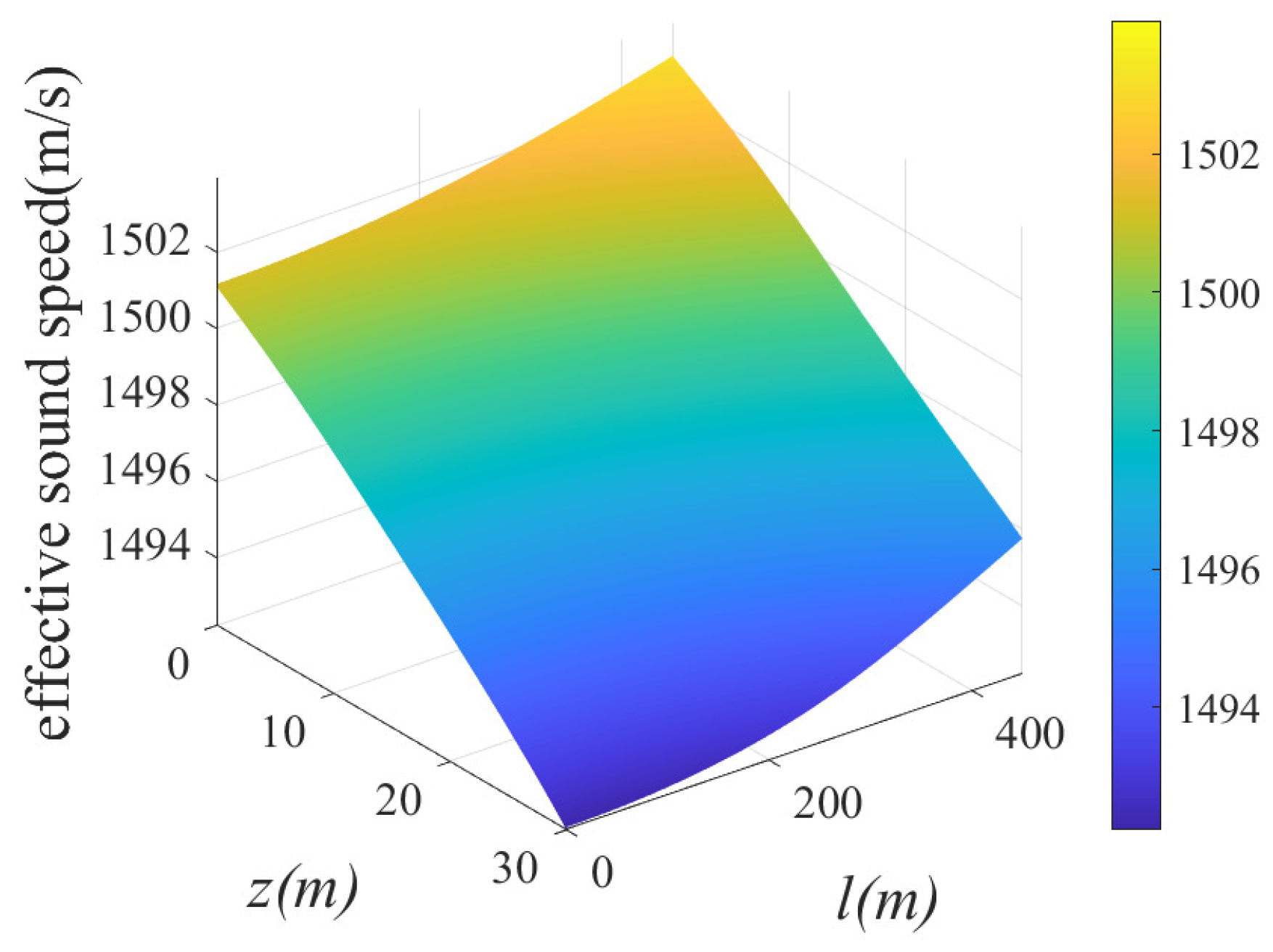
- The fitting accuracy of the initial node position is limited. By optimizing the node position through the PSO, the fitting accuracy of the B-spline surface is greatly improved. Therefore, the B-spline surface fitting method based on PSO can accurately obtain the continuous ESST.
- (2)
- (3)
- The dimension of the discrete ESST of each measurement station is a matrix of 800 × 60. After fitting with the B-spline surface, the data volume of the fitted ESST of each measurement station is (10 × 2 + 14 × 14), and the fitted ESST is a continuous surface.
- (4)
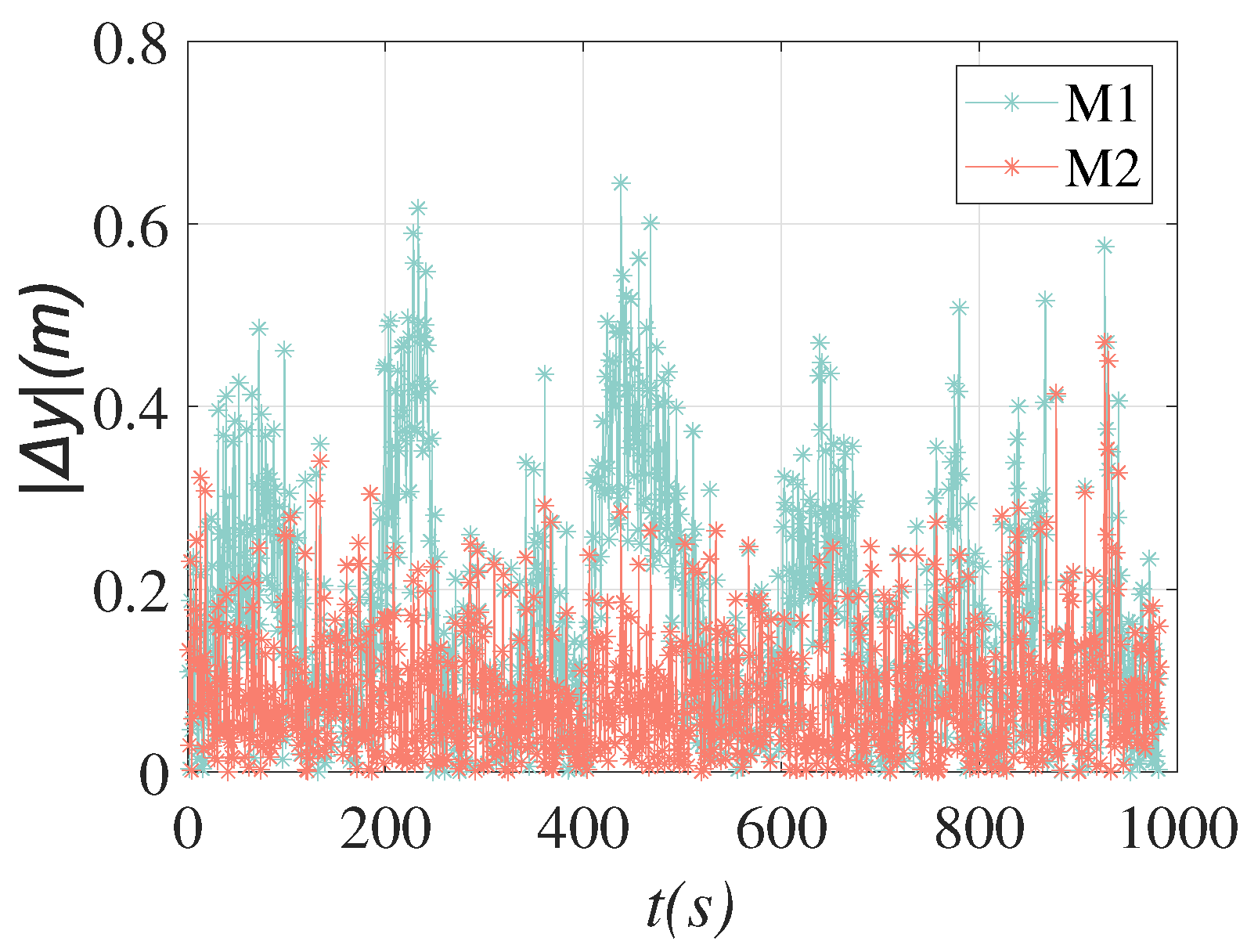
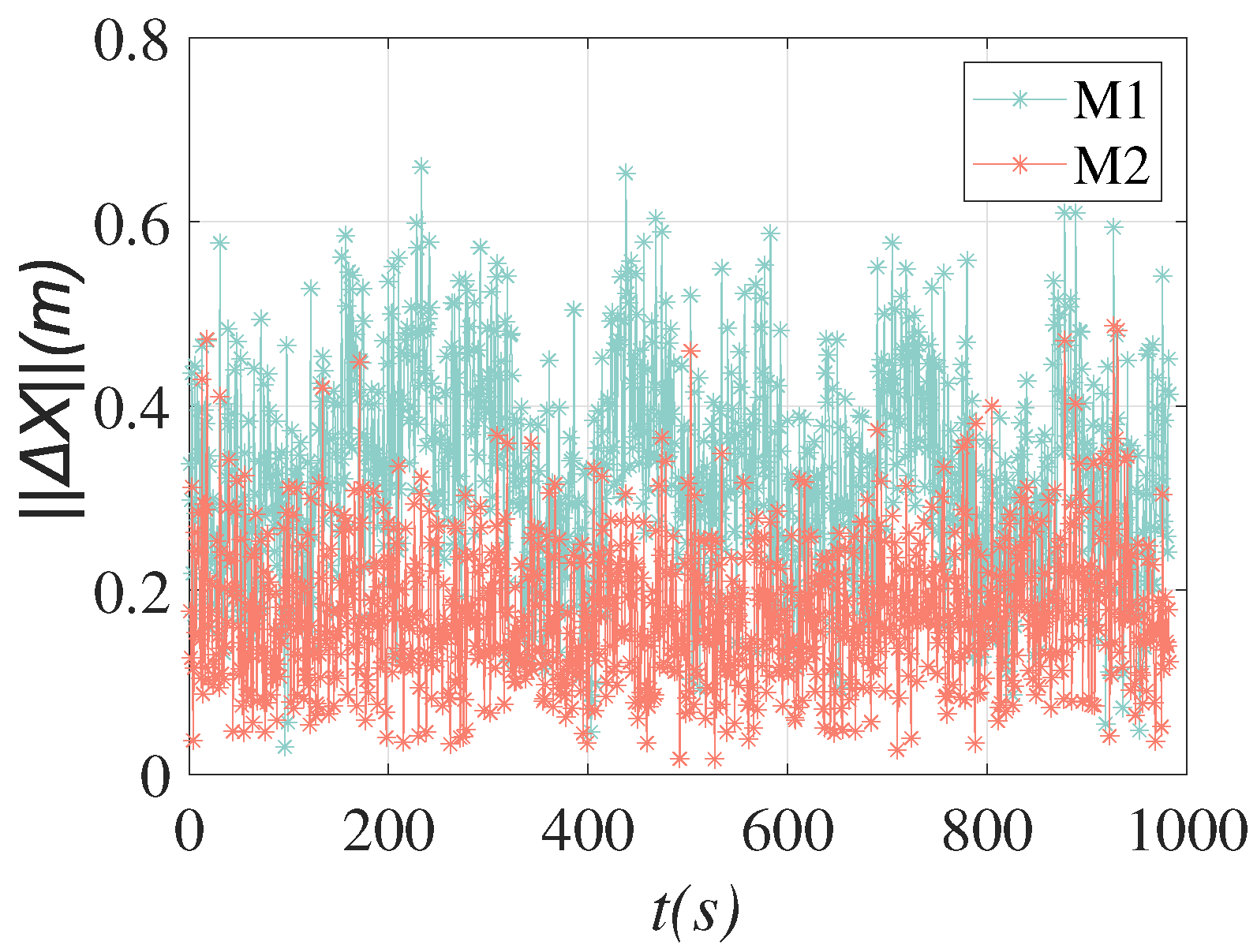
- The average sound speed is taken as the underwater sound speed in the traditional LBL positioning model (6), resulting in a significant estimation error. The improved positioning model constructed in this paper is based on the theory of ray tracing and the B-spline surface fitting method. The effective sound speed is obtained based on the TOA data and the target depth, which can reduce the influence of sound speed change on the positioning accuracy. The simulation results show that the improved positioning model proposed in this paper has a smaller estimation error than the traditional positioning model.
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ESST | Effective Sound Speed Table |
| GNSS | Global Navigation Satellite System |
| LBL | Long Baseline |
| PSO | Particle Swarm Optimizationm |
| SBL | Short Baseline |
| TOA | Time of Arrival |
| USBL | Ultra-Short Baseline |
Appendix A
References
- Wang, Y.; Yang, X.; Hao, L.Y.; Li, T.S.; Chen, C.L. Integral Sliding Mode Output Feedback Control for Unmanned Marine Vehicles Using T–S Fuzzy Model with Unknown Premise Variables and Actuator Faults. J. Mar. Sci. Eng. 2024, 12, 920. [Google Scholar] [CrossRef]
- Cao, Y.C.; Li, T.S.; Hao, L.Y. Nonlinear Model Predictive Control of Shipboard Boom Cranes Based on Moving Horizon State Estimation. J. Mar. Sci. Eng. 2023, 11, 4. [Google Scholar] [CrossRef]
- Li, Y.M.; Ma, Y.H.; Cao, J.; Yin, C.Y.; Ma, X.D. An Obstacle Avoidance Strategy for AUV Based on State-Tracking Collision Detection and Improved Artificial Potential Field. J. Mar. Sci. Eng. 2024, 12, 695. [Google Scholar] [CrossRef]
- Wang, W.; Wang, Y.; Li, T.S. Distributed Formation Maneuvering Quantized Control of Under-Actuated Unmanned Surface Vehicles with Collision and Velocity Constraints. J. Mar. Sci. Eng. 2024, 12, 848. [Google Scholar] [CrossRef]
- Gao, X.Y.; Li, T.S. Dynamic Positioning Control for Marine Crafts: A Survey and Recent Advances. J. Mar. Sci. Eng. 2024, 12, 362. [Google Scholar] [CrossRef]
- Feng, X.D.; Xing, Y.; Wang, J.Q.; He, Z.M.; Zhou, X.Y. Systematic Error Identification Method of Multi-beacon Long Baseline Positioning Based on Optimal Model Selection. J. Ballist. 2024, 36, 85–96. [Google Scholar]
- Li, M.H.; Liu, Y.; Liu, Y.X.; Chen, G.X.; Tang, Q.H.; Feng, Y.K.; Zhang, L.H.; Wen, Y.L. Impact of Sound Travel Time Modeling on Sequential GNSS-Acoustic Seafloor Positioning Under Various Survey Configurations. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5802011. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, A.; Han, X.; Xin, J. Acoustic Localization Scheme and Accuracy Analysis for Underwater Vertical Motion Target Using Multi-stations in the Seabed. Acta Acust. 2019, 44, 155–169. [Google Scholar]
- Liu, H.M.; Wang, Z.J.; Shan, R.; He, K.F.; Zhao, S. Research into the integrated navigation of a deepsea towed vehicle with USBL/DVL and pressure gauge. Appl. Acoust. 2020, 159, 107052. [Google Scholar] [CrossRef]
- Cheng, W.H. Research for enhancing the precision of asymmetrical SBL system for any vessels. Ocean Eng. 2006, 33, 1271–1282. [Google Scholar] [CrossRef]
- Tong, J.W.; Xu, X.S.; Hou, L.H.; Li, Y.; Wang, J.; Zhang, L. An ultra-short baseline positioning model based on rotating array & reusing elements and its error analysis. Sensors 2019, 19, 4373. [Google Scholar] [CrossRef] [PubMed]
- Fan, S.S.; Liu, C.Z.; Li, B.; Xu, Y.X.; Xu, W. AUV docking based on USBL navigation and vision guidance. J. Mar. Sci. Technol. 2019, 24, 673–685. [Google Scholar] [CrossRef]
- Sun, D.J.; Li, Z.Y.; Zheng, C.E. A High-precision Long-baseline Positioning Method for Underwater Volume Target. J. Electron. Inf. Technol. 2023, 45, 592–599. [Google Scholar]
- Xin, M.Z.; Yang, F.L.; Wang, F.X.; Shi, B.; Zhang, K.; Liu, H. A TOAAOA Underwater Acoustic Positioning System Based on the Equivalent Sound Speed. J. Navig. 2018, 71, 1431–1440. [Google Scholar] [CrossRef]
- Geng, X.Y.; Zielinski, A. Precise Multibeam Acoustic Bathymetry. Mar. Geod. 1999, 22, 157–167. [Google Scholar]
- Zhang, T.W.; Han, G.J.; Yan, L.; Peng, Y. Low-Complexity Effective Sound Velocity Algorithm for Acoustic Ranging of Small Underwater Mobile Vehicles in Deep-Sea Internet of Underwater Things. IEEE Internet Things J. 2023, 10, 563–574. [Google Scholar] [CrossRef]
- Li, Q.Q.; Tong, Q.; Yang, F.L.; Li, Q.; Juan, Z.H.; Luo, Y. An improved algorithm based on equivalent sound velocity profile method at large incident angle. Acta Oceanol. Sin. 2024, 43, 161–167. [Google Scholar] [CrossRef]
- Ameer, P.M.; Jacob, L. Localization Using Ray Tracing for Underwater Acoustic Sensor Networks. IEEE Commun. Lett. 2010, 14, 930–932. [Google Scholar] [CrossRef]
- Porter, M.B.; Bucker, H.P. Gaussian beam tracing for computing ocean acoustic fields. J. Acoust. Soc. Am. 1987, 82, 1349–1359. [Google Scholar] [CrossRef]
- Xing, Y.; Wang, J.Q.; He, Z.M.; Zhou, X.Y.; Chen, Y.Y.; Pan, X.G. TOA positioning algorithm of LBL system for underwater target based on PSO. J. Syst. Eng. Electron. 2023, 34, 1319–1332. [Google Scholar]
- Isik, M.T.; Akan, O.B. A three dimensional localization algorithm for underwater acoustic sensor networks. IEEE Trans. Wireless Commun. 2009, 8, 4457–4463. [Google Scholar] [CrossRef]
- Sun, D.J.; Li, H.P.; Zheng, C.E.; Li, X. Sound velocity correction based on effective sound velocity for underwater acoustic positioning systems. Appl. Acoust. 2019, 151, 55–62. [Google Scholar] [CrossRef]
- Zhang, T.W.; Yan, L.; Han, G.J.; Peng, Y. Fast and Accurate Underwater Acoustic Horizontal Ranging Algorithm for an Arbitrary Sound-Speed Profile in the Deep Sea. IEEE Internet Things J. 2022, 9, 755–769. [Google Scholar] [CrossRef]
- Huang, J.; Yan, S.G. An Improvement of Long Baseline System Using Particle Swarm Optimization to Optimize Effective Sound Speed. Mar. Geod. 2018, 41, 439–456. [Google Scholar] [CrossRef]
- Yi, D.Y.; Zhu, J.B.; Wang, Z.M. Spline Method of Separating Signal with Three Frequency Bands. Acta Electron. Sin. 1999, 27, 54–57. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (m) | (m) | (m) | (m) | (m) | (m) | (m) | (m) | (m) | (m) | |
|---|---|---|---|---|---|---|---|---|---|---|
| 36.3636 | 72.7273 | 109.0909 | 145.4545 | 181.8182 | 218.1818 | 254.5455 | 290.9091 | 327.2727 | 363.6364 | |
| 0.0092 | 1.3678 | 101.8749 | 104.5886 | 228.5547 | 283.0521 | 285.5396 | 289.9352 | 313.4571 | 384.8025 | |
| 0.0054 | 0.0073 | 5.0202 | 126.5374 | 139.6849 | 156.8044 | 180.6934 | 181.2321 | 342.4901 | 344.1411 | |
| 0.0274 | 5.4753 | 81.9488 | 128.0599 | 144.4255 | 150.0506 | 194.1382 | 309.2122 | 333.4297 | 345.8373 | |
| 0.0078 | 0.0100 | 1.1143 | 7.7296 | 139.3083 | 142.6808 | 172.3512 | 225.2021 | 245.1397 | 297.3150 | |
| 0.0112 | 1.3489 | 70.6676 | 114.7475 | 146.9981 | 168.9183 | 232.8474 | 309.2341 | 399.9858 | 399.9883 |
| (m) | (m) | (m) | (m) | (m) | (m) | (m) | (m) | (m) | (m) | |
|---|---|---|---|---|---|---|---|---|---|---|
| 2.7273 | 5.4545 | 8.1818 | 10.9091 | 13.6364 | 16.3636 | 19.0909 | 21.8182 | 24.5455 | 27.2727 | |
| 0.0249 | 6.7565 | 13.6880 | 13.7749 | 13.8123 | 16.0755 | 18.2588 | 20.4489 | 20.4490 | 22.5796 | |
| 6.6353 | 13.3419 | 13.3446 | 14.5304 | 16.6499 | 16.6528 | 19.4688 | 20.0315 | 20.3710 | 22.6115 | |
| 0.0654 | 6.7118 | 13.3861 | 13.3939 | 14.4381 | 16.0236 | 18.2102 | 20.4504 | 20.4626 | 22.5622 | |
| 6.6384 | 13.3718 | 13.3718 | 14.4618 | 16.0170 | 18.2245 | 20.4799 | 20.4801 | 23.5473 | 23.5474 | |
| 2.0896 | 6.8612 | 13.3935 | 13.3935 | 14.4438 | 16.0177 | 18.2402 | 20.4521 | 20.4522 | 22.5751 |
| The initial fitting accuracy (m/s) | 0.5278 | 0.5276 | 0.5279 | 0.5276 | 0.5276 |
| The optimal fitting accuracy (m/s) | 0.1196 | 0.1080 | 0.1070 | 0.1111 | 0.1147 |
| (m) | (m) | (m) | |
|---|---|---|---|
| 0.2127 | 0.1733 | 0.3306 | |
| 0.0938 | 0.0880 | 0.1758 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, Y.; Wang, J.; Hou, B.; He, Z.; Zhou, X. Underwater Long Baseline Positioning Based on B-Spline Surface for Fitting Effective Sound Speed Table. J. Mar. Sci. Eng. 2024, 12, 1429. https://doi.org/10.3390/jmse12081429
Xing Y, Wang J, Hou B, He Z, Zhou X. Underwater Long Baseline Positioning Based on B-Spline Surface for Fitting Effective Sound Speed Table. Journal of Marine Science and Engineering. 2024; 12(8):1429. https://doi.org/10.3390/jmse12081429
Chicago/Turabian StyleXing, Yao, Jiongqi Wang, Bowen Hou, Zhangming He, and Xuanying Zhou. 2024. "Underwater Long Baseline Positioning Based on B-Spline Surface for Fitting Effective Sound Speed Table" Journal of Marine Science and Engineering 12, no. 8: 1429. https://doi.org/10.3390/jmse12081429
APA StyleXing, Y., Wang, J., Hou, B., He, Z., & Zhou, X. (2024). Underwater Long Baseline Positioning Based on B-Spline Surface for Fitting Effective Sound Speed Table. Journal of Marine Science and Engineering, 12(8), 1429. https://doi.org/10.3390/jmse12081429