
Ship Maneuvering in Shallow and Narrow Waters: Predictive Methods and Model Development Review





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Maneuvering Characteristic
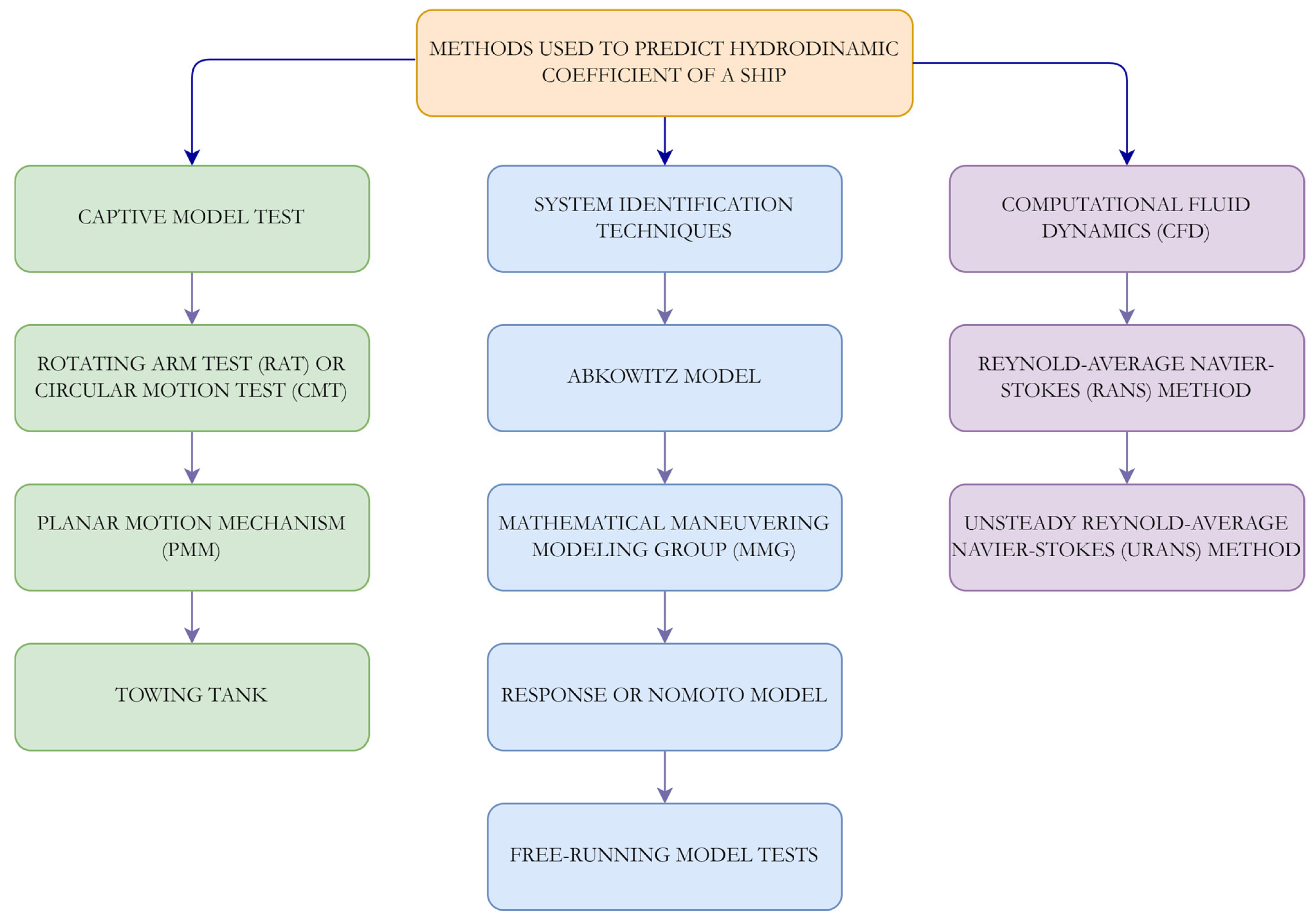
1.2. Methods Used to Predict Hydrodynamic Coefficient of a Ship
1.3. Approach Channels and Waterways
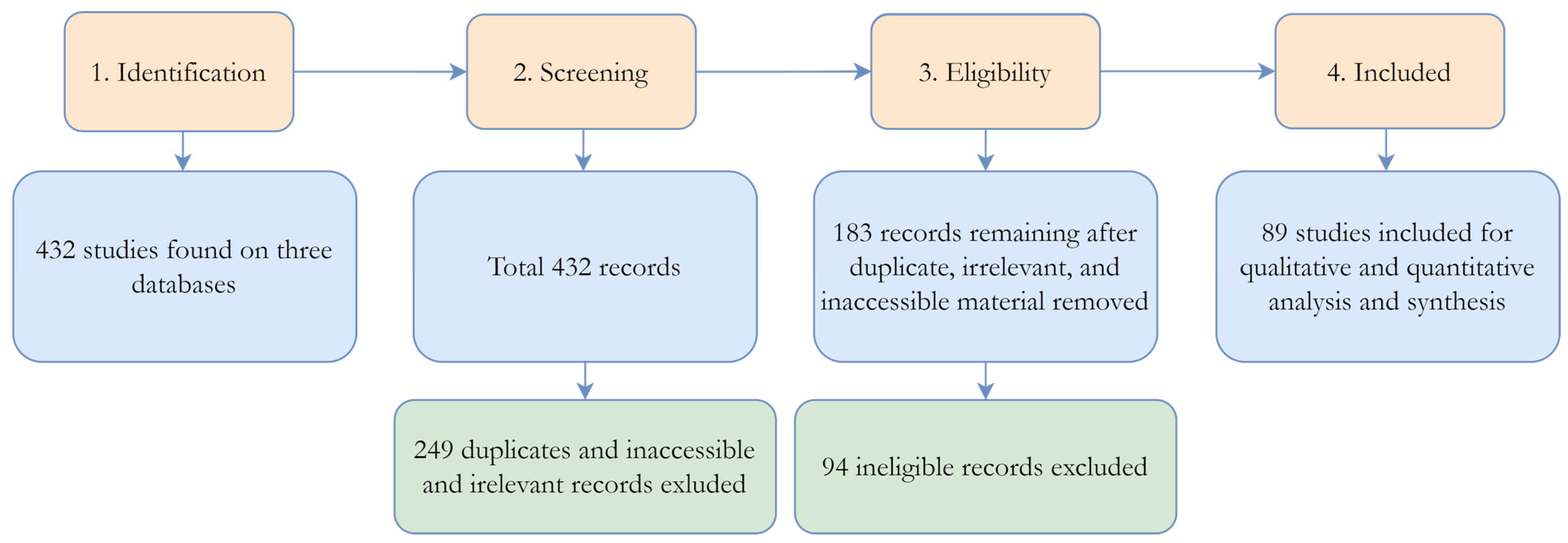
2. Materials and Methods
- ship maneuvering;
- restricted waters;
- shallow water effect;
- squat;
- bank effect;
- ship hydrodynamics.
3. Results and Discussion
3.1. The Captive Model Test
3.2. Computational Fluid Dynamics
3.3. System Identification Techniques
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ANN | artificial neural networks |
| CFD | computational fluid dynamics |
| CMT | Circular Motion Test |
| DOF | degrees of freedom |
| EEDI | Energy Efficiency Design Index |
| FHR | Flanders Hydraulic Research |
| IMO | International Maritime Organization |
| JMMG | Japanese Maneuvering Modeling Group |
| MASS | Maritime Autonomous Surface Ships |
| MMG | Mathematical Maneuvering Modeling Group |
| OTT | Oblique Towing Test |
| PIANC | The World Association of Waterborne Transport Infrastructure |
| PMM | Planar Motion Mechanism |
| PRISMA | Preferred Reporting Items for Systematic Reviews and Meta-Analyzes |
| RANS | Reynolds-Average Navier-Stokes |
| RAT | Rotating Arm Test |
| RPMs | revolutions per minute |
| SB | system-based |
| SHOPERA | Energy Efficient Safe Ship Operation |
| STS | ship-to-ship |
| UKC | Under-Keel Clearance |
| ULCC | Ultra-Large Crude Carrier |
| ULCV | Ultra-Large Container Vessel |
| URANS | Unsteady Reynolds-Average Navier-Stokes |
| VLCC | Very Large Crude Carrier |
References
- Sjöberg, H.; Roos, H.; Edvall, A.; Hallbjörner, F. Safe Handling of Ultra Large Container Ships in Strong Wind; Gothenburg Pilot 2016-12-01; Final Report—Version 2.0; Swedish Maritime Administration: Norrköping, Sweden.
- Fan, S.; Yang, Z.; Wang, J.; Marsland, J. Shipping accident analysis in restricted waters: Lesson from the Suez Canal blockage in 2021. Ocean Eng. 2022, 266, 113119. [Google Scholar]
- Terziev, M.; Tezdogan, T.; Oguz, E.; Gourlay, T.; Demirel, Y.K.; Incecik, A. Numerical investigation of the behaviour and performance of ships advancing through restricted shallow waters. J. Fluids Struct. 2018, 76, 185–215. [Google Scholar]
- Lee, S.; Hong, C. Study on the course stability of very large vessels in shallow water using CFD. Ocean Eng. 2017, 145, 395–405. [Google Scholar]
- Gucma, L. Risk Management in the Area of Bridges Situated on Waterways in the Aspect of Ship Collisions, 1st ed.; Marine Traffic Engineering—MTE: Szczecin, Poland, 2024. [Google Scholar]
- Özden, M.C.; Kurdoğlu, S.; Demir, E.; Sarıöz, K.; Gören, Ö. A compact motion controller-based planar motion mechanism for captive manoeuvring tests. Ocean Eng. 2021, 220, 108195. [Google Scholar]
- Guo, H.; Zou, Z. System-based investigation on 4-DOF ship maneuvering with hydrodynamic derivatives determined by RANS simulation of captive model tests. Appl. Ocean. Res. 2017, 68, 11–25. [Google Scholar]
- MSC.137(76); I. Resolution MSC.137(76) (Adopted on 4 December 2002), Standards for Ship Manoeuvrability. International Maritime Organization: London, UK, 2002.
- Atchison, J. Guide for Vessel Maneuverability; American Bureau of Shipping ABS: Houston, TX, USA, 2017. [Google Scholar]
- Eloot, K.; Vantorre, M. NATO Unclassified + SWE Ship behaviour in Shallow and Confined Water: An Overview of Hydrodynamic Effects through EFD. Assess. Stab. Control. Predict. Methods NATO Air Sea Veh. 2011, 20. [Google Scholar]
- Chen, C.; Verwilligen, J.; Mansuy, M.; Eloot, K.; Lataire, E.; Delefortrie, G. Tracking controller for ship manoeuvring in a shallow or confined fairway: Design, comparison and application. Appl. Ocean. Res. 2021, 115, 102823. [Google Scholar]
- Liu, J.; Hekkenberg, R.; Rotteveel, E.; Hopman, H. Literature review on evaluation and prediction methods of inland vessel manoeuvrability. Ocean Eng. 2015, 106, 458–471. [Google Scholar]
- Amin, O.M.; Hasegawa, K. Assessment of Ship Manoeuvrability in Shallow Waterways. In Proceedings of the MARTEC 2010, Osaka, Japan, 11 December 2010. [Google Scholar]
- Osman, M.A.; Kazuhiko, H. Assessment of Ship Manoeuvrability in Shallow Waterways. In Proceedings of the International Conference on Marine Technology, Dhaka, Bangladesh, 11–12 December 2010. [Google Scholar]
- Fujino, M. Studies on Manoeuvrability of Ships in Restricted Waters. J. Soc. Nav. Arch. Jpn. 1970, 4, 157–184. [Google Scholar]
- Eloot, K.; Delefortrie, G.; Vantorre, M.; Quadvlieg, F. Validation of Ship Manoeuvring in Shallow Water Through Free-Running Tests. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, American Society of Mechanical Engineers, Hamburg, Germany, 31 May–5 June 2015. [Google Scholar]
- Rev The I.T.T.C. Captive Model Test Procedure 7.5-02-06-02, Manual of the Recommended Procedures and Guidelines Maintenance, Manoeuvering Committee of the 29th ITTC, June 2021.
- Xu, H.; Soares, C.G. Hydrodynamic coefficient estimation for ship manoeuvring in shallow water using an optimal truncated LS-SVM. Ocean Eng. 2019, 191, 106488. [Google Scholar]
- Du, P.; Ouahsine, A.; Toan, K.T.; Sergent, P. Simulation of ship maneuvering in a confined waterway using a nonlinear model based on optimization techniques. Ocean Eng. 2017, 142, 194–203. [Google Scholar]
- Testing and Extrapolation Methods Manoeuvrability Captive Model Test Procedures. In Proceedings of the ITTC International Towing Tank Conference ITTC, Edinburgh, Scotland, 1 September 2005; University of Newcastle upon Tyne: Newcastle upon Tyne, UK, 2005.
- Hajivand, A.; Mousavizadegan, S.H. Virtual simulation of maneuvering captive tests for a surface vessel. Int. J. Nav. Archit. Ocean Eng. 2015, 7, 848–872. [Google Scholar]
- Captive Model Test for Underwater Vehicles. In Proceedings of the ITTC International Towing Tank Conference ITTC, Virtual, 13–18 June 2021; Manoeuvering Committee: Wageningen, The Netherlands, 2021.
- Liu, Y.; Zou, L.; Zou, Z.; Guoa, H. Predictions of ship maneuverability based on virtual captive model tests. Eng. Appl. Comput. Fluid. Mech. 2018, 12, 334–353. [Google Scholar]
- Hajizadeh, S.; Seif, M.S.; Mehdigholi, H. Determination of ship maneuvering hydrodynamic coefficients using system identification technique based on free-running model test. Sci. Iran. 2016, 23, 2154–2165. [Google Scholar]
- Zhang, X.G.; Zou, Z.J. Identification of Abkowitz model for ship manoeuvring motion using ε-support vector regression. J. Hydrodyn. 2011, 23, 353–360. [Google Scholar]
- Ahmed, Y.A. Mathematical model of the manoeuvring motion of a ship. In Advanced Structured Materials; Springer: Berlin/Heidelberg, Germany, 2018; Volume 85, pp. 551–566. [Google Scholar]
- Nomoto, K.; Taguchi, T.; Honda, K.; Hirano, S. On The Steering Qualities of Ships; Department of Naval Architecture; Osaka University: Osaka, Japan, 1957. [Google Scholar]
- Luo, W.; Zou, Z. Identification of Response Models of Ship Maneuvering Motion Using Support Vector Machines. J. Ship Mech. 2007, 11, 6. [Google Scholar]
- Kim, D.; Tezdogan, T.; Incecik, A. Hydrodynamic analysis of ship manoeuvrability in shallow water using high-fidelity URANS computations. Appl. Ocean Res. 2022, 123, 103176. [Google Scholar]
- Mofidi, A.; Carrica, P.M. Simulations of zigzag maneuvers for a container ship with direct moving rudder and propeller. Comput. Fluids 2014, 96, 191–203. [Google Scholar]
- Bertram, V. Ship Maneuvering. In Practical Ship Hydrodynamics; Elsevier: Amsterdam, The Netherlands, 2012; pp. 241–298. [Google Scholar]
- Lataire, E. Captive model tests based 6 DOF shallow water manoeuvring model. In Proceedings of the 4th MASHCON, Karlsruhe, Germany, 23–25 May 2016. [Google Scholar]
- Kazerooni, M.F.; Seif, M.S. Experimental evaluation of ship squat in shallow waters. J. Braz. Soc. Mech. Sci. Eng. 2014, 36, 559–569. [Google Scholar]
- Taimuri, G.; Matusiak, J.; Mikkola, T.; Kujala, P.; Hirdaris, S. A 6-DoF maneuvering model for the rapid estimation of hydrodynamic actions in deep and shallow waters. Ocean Eng. 2020, 218, 108103. [Google Scholar]
- Tuck, E.; Model Basin, D.T.; Washington, D.C. Shallow-water flows past slender bodies. J. Fluid Mech. 1966, 26, 81–95. [Google Scholar]
- Hooft, J.P. Manoeuvring Large Ships in Shallow Water-I. J. Navig. 1973, 26, 189–201. [Google Scholar]
- Carreño, J.E.; Mora, J.D.; Pérez, F.L. A Study of Shallow Water’s Effect on a Ship’s Pivot Point. Ing. Investig. 2012, 32, 27–31. [Google Scholar]
- Xu, H.; Hinostroza, M.A.; Wang, Z.; Guedes Soares, C. Experimental investigation of shallow water effect on vessel steering model using system identification method. Ocean Eng. 2020, 199, 106940. [Google Scholar]
- Hooft, J.P. Manoeuvring Large Ships in Shallow Water-II. J. Navig. 1973, 26, 311–319. [Google Scholar]
- Zeng, Q.; Thill, C.; Hekkenberg, R. Shallow water effects on ship-generate d waves. In Proceedings of the 5th International Conference on Ship Manoeuvring in Shallow and Confined Water (MASHCON), Ostend, Belgium, 19–23 May 2019. [Google Scholar]
- Sami, K.; Mohamed, A.; Emmanuel, L.; Hassan, S. Numerical Modeling of the Muddy Layer Effect on Ship Squat and Resistance. In Proceedings of the 5th International Conference on Ship Manoeuvring in Shallow and Confined Water (MASHCON), Ostend, Belgium, 19–23 May 2019. [Google Scholar]
- The World Association for Waterborne Transport Infrastructure. Pianc Report No 121-2014—Harbour Approach Channels Design Guidelines; Maritime Navigation Commission: Basel, Switzerland, 2014. [Google Scholar]
- ROM 3.1-99; Puertos del Estado (España) Recommendations for the Design of the Maritime Configuration of Ports, Approach Channels and Harbour Basins. Puertos del Estado: Madrid, Spain, 2007.
- Bechthold, J.; Kastens, M. Robustness and quality of squat predictions in shallow water conditions based on rans-calculations. In Proceedings of the 5th International Conference on Ship Manoeuvring in Shallow and Confined Water (MASHCON), Ostend, Belgium, 19–23 May 2019; pp. 11–24. [Google Scholar]
- Shevchuk, I.; Bottner, C.U.; Kornev, N. Numerical investigation of scale effects on squat in shallow water. In Proceedings of the 5th International Conference on Ship Manoeuvring in Shallow and Confined Water (MASHCON), Ostend, Belgium, 19–23 May 2019; pp. 410–422. [Google Scholar]
- PIANC, The World Association for Waterborne Transport Infrastructure. Ship Dimensions and Data for Design of Marine Infrastructure; PIANC HQ Boulevard du Roi Albert II 20 B. 3, Ed.; No. 235-2022; General Secretariat of PIANC: Brussels, Belgium, 1990. [Google Scholar]
- Liberati, A.; Altman, D.G.; Tetzlaff, J.; Mulrow, C.; Gøtzsche, P.C.; Ioannidis, J.P.A.; Clarke, M.; Devereaux, P.J.; Kleijnen, J.; Moher, D. The PRISMA statement for reporting systematic reviews and meta-analyses of studies that evaluate health care interventions: Explanation and elaboration. J. Clin. Epidemiol. 2009, 62, e1–e34. [Google Scholar] [PubMed]
- Tello Ruiz, M.; Mansuy, M.; Delefortrie, G.; Vantorre, M. Modelling the manoeuvring behaviour of an ULCS in coastal waves. Ocean Eng. 2019, 172, 213–233. [Google Scholar]
- Lataire, E.; Vantorre, M.; Vandenbroucke, J.; Eloot, K. Ship to Ship Interaction Forces During Lightering Operations. In Proceedings of the International Conference on Ship Manoeuvring in Shallow and Confined Water: Ship to Ship Interaction (Mashcon 2), Trodheim, Norway, 18–20 May 2011. [Google Scholar]
- Sutulo, S.; Rodrigues, J.M.; Guedes Soares, C. Hydrodynamic characteristics of ship sections in shallow water with complex bottom geometry. Ocean Eng. 2010, 37, 947–958. [Google Scholar]
- Xu, H.; Guedes Soares, C. Manoeuvring modelling of a containership in shallow water based on optimal truncated nonlinear kernel-based least square support vector machine and quantum-inspired evolutionary algorithm. Ocean Eng. 2020, 195, 106676. [Google Scholar]
- Yasukawa, H.; Sakuno, R. Application of the MMG method for the prediction of steady sailing condition and course stability of a ship under external disturbances. J. Mar. Sci. Technol. 2020, 25, 196–220. [Google Scholar]
- Michael, S.T.; Franz, S.H. Maneuvering and Control of Surface and Underwater Vehicles; Lecture Notes; OpenCourseWare: Cambridge, MA, USA, 2013. [Google Scholar]
- Liu, H.; Ma, N.; Gu, X. Experimental Study on Ship-Bank Interaction of Very Large Crude Carrier in Shallow Water. J. Shanghai Jiaotong Univ. Sci. 2018, 23, 730–739. [Google Scholar]
- Lataire, E.; Vantorre, M.; Delefortrie, G.; Candries, M. Mathematical modelling of forces acting on ships during lightering operations. Ocean Eng. 2012, 55, 101–115. [Google Scholar]
- Milanov, E.; Zlatev, Z.; Chotukova, V.; Stern, F. Analysis of inherent course stability of a high-speed catamaran in deep and shallow water. Int. Shipbuild. Progress 2011, 58, 83–96. [Google Scholar]
- Zhu, Z.; Kim, B.S.; Wang, S.; Kim, Y. Study on numerical PMM test and its application to KCS hull. Appl. Ocean Res. 2022, 127, 103327. [Google Scholar]
- Hirano, M.; Nakamura’, Y. The Japan Society of Naval Architects and Ocean Engineers NII-Electronic Library Service an Experimental Study on Maneuvering Hydrodynamic Forces in Shallow Water; The Japan Society of Naval Architects and Ocean Engineers: Osaka, Japan, 2010. [Google Scholar]
- Delefortrie, G.; Geerts, S. The towing tank for manoeuvres in shallow water. In Proceedings of the 4th MASHCON, Karlsruhe, Germany, 23–25 May 2016. [Google Scholar]
- The I.T.T.C. Free Running Model Tests Procedures 7.5-02-06-01, Manual of the Recommended Procedures and Guidelines Maintenance, Seakeeping Committee of the 29th ITTC, June 2021. 20 June.
- Delefortrie, G.; Vantorre, M. 6DOF manoeuvring model of KCS with full roll coupling. Ocean Eng. 2021, 235, 109327. [Google Scholar]
- Yao, J.; Liu, Z.; Song, X.; Su, Y. Ship manoeuvring prediction with hydrodynamic derivatives from RANS: Development and application. Ocean Eng. 2021, 231, 109036. [Google Scholar]
- Lee, S.H.; Paik, K.J.; Hwang, H.S.; Eom, M.J.; Kim, S.H. A study on ship performance in waves using a RANS solver, part 1: Comparison of power prediction methods in regular waves. Ocean Eng. 2021, 227, 108900. [Google Scholar]
- Guo, H.; Zou, Z.; Liu, Y.; Wang, F. Investigation on hull-propeller-rudder interaction by RANS simulation of captive model tests for a twin-screw ship. Ocean Eng. 2018, 162, 259–273. [Google Scholar]
- Tu, H.; Song, L.; Xie, D.; Liu, Z.; Zhang, Z.; Sun, J. Performing captive model tests with a hexapod. Ocean Eng. 2019, 171, 49–58. [Google Scholar]
- ITTC International Towing Tank Conference 2021 Rev 06 ITTC—Captive Model Test; 2021.
- Ortolani, F.; Mauro, S.; Dubbioso, G. Investigation of the radial bearing force developed during actual ship operations. Part 1: Straight ahead sailing and turning maneuvers. Ocean Eng. 2015, 94, 67–87. [Google Scholar]
- Zou, L.; Larsson, L. Computational fluid dynamics (CFD) prediction of bank effects including verification and validation. J. Mar. Sci. Technol. 2013, 18, 310–323. [Google Scholar]
- Recommended Procedures and Guidelines Practical Guidelines for Ship CFD Applications. In Proceedings of the ITTC International Towing Tank Conference ITTC, Copenhagen, Denmark, 31 August–5 September 2014; Manoeuvering Committee: Wageningen, The Netherlands, 2014.
- Practical Guidelines for RANS Calculation of Nominal Wakes. In Proceedings of the ITTC International Towing Tank Conference ITTC, Copenhagen, Denmark, 31 August–5 September 2014; Quality Systems Group: Copenhagen, Denmark, 2014.
- Van Hoydonck, W.; Toxopeus, S.; Eloot, K.; Bhawsinka, K.; Queutey, P.; Visonneau, M. Bank effects for KVLCC2. J. Mar. Sci. Technol. 2019, 24, 174–199. [Google Scholar]
- Hajivand, A.; Hossein Mousavizadegan, S. Virtual maneuvering test in CFD media in presence of free surface. Int. J. Nav. Archit. Ocean Eng. 2015, 7, 540–558. [Google Scholar]
- Tezdogan, T.; Incecik, A.; Turan, O. Full-scale unsteady RANS simulations of vertical ship motions in shallow water. Ocean Eng. 2016, 123, 131–145. [Google Scholar]
- DeMarco Muscat-Fenech, C.; Sant, T.; Zheku, V.V.; Villa, D.; Martelli, M. A Review of Ship-to-Ship Interactions in Calm Waters. J. Mar. Sci. Eng. 2022, 10, 1856. [Google Scholar] [CrossRef]
- Kazerooni, M.F.; Seif, M.S. Experimental Study of Forces Exerted on Ships Due to the Vertical Walls of Navigation Channels. Trans. Nav. Int. J. Mar. Navig. Saf. Sea Transp. 2015, 9, 199–203. [Google Scholar]
- Serani, A.; Diez, M.; van Walree, F.; Stern, F. URANS analysis of a free-running destroyer sailing in irregular stern-quartering waves at sea state 7. Ocean Eng. 2021, 237, 109600. [Google Scholar]
- Jin, Y.; Duffy, J.; Chai, S.; Magee, A.R. DTMB 5415M dynamic manoeuvres with URANS computation using body-force and discretised propeller models. Ocean Eng. 2019, 182, 305–317. [Google Scholar]
- Kim, D.; Song, S.; Tezdogan, T. Free running CFD simulations to investigate ship manoeuvrability in waves. Ocean Eng. 2021, 236, 109567. [Google Scholar]
- Kim, D.; Tezdogan, T. CFD-based hydrodynamic analyses of ship course keeping control and turning performance in irregular waves. Ocean Eng. 2022, 248, 110808. [Google Scholar]
- Broglia, R.; Dubbioso, G.; Durante, D.; Di Mascio, A. Turning ability analysis of a fully appended twin screw vessel by CFD. Part I: Single rudder configuration. Ocean Eng. 2015, 105, 275–286. [Google Scholar]
- Dubbioso, G.; Durante, D.; Di Mascio, A.; Broglia, R. Turning ability analysis of a fully appended twin screw vessel by CFD. Part II: Single vs. twin rudder configuration. Ocean Eng. 2016, 117, 259–271. [Google Scholar]
- Carrica, P.M.; Mofidi, A.; Eloot, K.; Delefortrie, G. Direct simulation and experimental study of zigzag maneuver of KCS in shallow water. Ocean Eng. 2016, 112, 117–133. [Google Scholar]
- Jiang, F.; Li, Y.; Gong, J. Study on the manoeuvre characteristics of a trimaran under different layouts by water-jet self-propulsion model test. Appl. Ocean Res. 2021, 108, 102550. [Google Scholar]
- Gao, T.; Wang, Y.; Pang, Y.; Chen, Q.; Tang, Y. A time-efficient CFD approach for hydrodynamic coefficient determination and model simplification of submarine. Ocean Eng. 2018, 154, 16–26. [Google Scholar]
- Proposal, R.; Yoshimura, Y.; Pyo Rhee, K. The Manoeuvring Committee Final Report and Recommendations to the 24th ITTC; Manoeuvring Committee: Glasgow, UK, 2005. [Google Scholar]
- Araki, M.; Sadat-Hosseini, H.; Sanada, Y.; Tanimoto, K.; Umeda, N.; Stern, F. Estimating maneuvering coefficients using system identification methods with experimental, system-based, and CFD free-running trial data. Ocean Eng. 2012, 51, 63–84. [Google Scholar]
- Testing and Extrapolation Methods Manoeuvrability Free Running Model test. In Proceedings of the ITTC International Towing Tank Conference ITTC, Fukuoka, Japan, 14–20 September 2008; pp. 1–11.
- Mohammadafzali, S. A Mathematical Model for the Maneuvering Simulation of a Propelled SPAR Vessel. Master’s, Thesis, Memorial University of Newfoundland, Norris Point, NL, Canada, 2016. [Google Scholar]
- A Abkowitz, B.M.T.U. Hydro-Og Aerodynamisk Laboratorium Lectures on Ship Hydrodynamics-Steering and Manoeuvrability; Faculty Mechanical, Maritime and Materials Engineering: Lyngby, Denmark, 1964. [Google Scholar]
- Abkowitz, M.A. Stability-and-Motion-Control-of-Ocean-Vehicles; The MIT Press: Cambridge, MA, USA, 1969. [Google Scholar]
- Vijay, A.; Somayajula, A. Identification of Hydrodynamic Coefficients using Support Vector Regression. In Oceans Conference Record (IEEE); Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2022. [Google Scholar]
- Yoshimura, Y. Mathematical model for the manoeuvring ship motion in shallow water. [Application of MMG mathematical model to shallow water]-41. J. Kansai Soc. Nav. Archit. Jpn. 1976, 200, 42–51. [Google Scholar]
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG standard method for ship maneuvering predictions. J. Mar. Sci. Technol. 2015, 20, 37–52. [Google Scholar]
- Dr-Ing Zou Zaojian, B.; Jiao, S. Lecture Notes on Ship Manoeuvring and Seakeeping; School of Naval Architecture, Ocean and Civil Engineering: Shanghai, China, 2006. [Google Scholar]
- Dubbioso, G.; Viviani, M. Aspects of twin screw ships semi-empirical maneuvering models. Ocean Eng. 2012, 48, 69–80. [Google Scholar]
- Moreira, L.; Guedes Soares, C. Simulating Ship Manoeuvrability with Artificial Neural Networks Trained by a Short Noisy Data Set. J. Mar. Sci. Eng. 2023, 11, 15. [Google Scholar]
- Moreira, L.; Guedes Soares, C. Dynamic model of manoeuvrability using recursive neural networks. Ocean Eng. 2003, 30, 1669–1697. [Google Scholar]
- Im, N.; Hasegawa, K. A Study on Automatic Ship Berthing Using Parallel Neural Controller (2nd Report)—Motion Identification Considering Lateral Speed and Angular Velocity to cope with Disturbances—The Technology for Marine Traffic Hazard Control system using Ship navigation Big Data View project Ship Accident Analysis View project. J. Kansai Soc. Nav. Archit. Jpn. 2002, 2002, 237_127–237_132. [Google Scholar]
- Im, N.K.; Nguyen, V.S. Artificial neural network controller for automatic ship berthing using head-up coordinate system. Int. J. Nav. Archit. Ocean Eng. 2018, 10, 235–249. [Google Scholar]
- Sutulo, S.; Guedes Soares, C. An algorithm for offline identification of ship manoeuvring mathematical models from free-running tests. Ocean Eng. 2014, 79, 10–25. [Google Scholar]
- Rajesh, G.; Bhattacharyya, S.K. System identification for nonlinear maneuvering of large tankers using artificial neural network. Appl. Ocean Res. 2008, 30, 256–263. [Google Scholar]
- Lacki, M. Intelligent Prediction of Ship Maneuvering. Trans. Nav. Int. J. Mar. Navig. Saf. Sea Transp. 2017, 10, 511–516. [Google Scholar]
- Gug, S.G.; Harshapriya, D.; Jeong, H.; Yun, J.H.; Kim, D.J.; Kim, Y.G. Analysis of manoeuvring characteristics through sea trials and simulations. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Chennai, India, 16–17 September 2020; IOP Publishing Ltd.: Bristol, UK, 2020; Volume 929. [Google Scholar]
- Xue, Y.; Liu, Y.; Xue, G.; Chen, G. Identification and prediction of ship maneuvering motion based on a gaussian process with uncertainty propagation. J. Mar. Sci. Eng. 2021, 9, 804. [Google Scholar] [CrossRef]
- Sutulo, S.; Guedes Soares, C. Review on ship manoeuvrability criteria and standards. J. Mar. Sci. Eng. 2021, 9, 904. [Google Scholar] [CrossRef]
- Papanikolaou, A.; Zaraphonitis, G.; Shigunov, V.; Papanikolaou, A.; Zaraphonitis, G.; Bitner-Gregersen, E.; Shigunov, V.; El Moctar, O.; Guedes Soares, C.; Reddy, D.N.; et al. Energy Efficient Safe Ship Operation (SHOPERA). In Proceedings of the SNAME Maritime Convention, Bellevue, WA, USA, 2–4 November 2016. [Google Scholar]
- Van Zwijnsvoorde, T.; Tello Ruiz, M.; Delefortrie, G.; Lataire, E. Sailing in shallow water waves with the DTC container carrier: Open model test data for validation purposes. In Knowledge Centre Manoeuvring in Shallow and Confined Water, Proceedings of the 5th International Conference on Ship Manoeuvring in Shallow and Confined Water (MASHCON), Ostend, Belgium, 19–23 May 2019; Gent University: Gent, Belgium, 2019; pp. 411–422. [Google Scholar]
- International Maritime Organization; Marine Environment Protection Committee (MEPC); Resolution MEPC.203(62) Amendments to the Annex of the Protocol of 1997 to Amend the International Convention for the Prevention of Pollution from Ships, 1973, as Modified by the Protocol of 1978 Relating thereto (Inclusion of Regulations on Energy Efficiency for Ships in MARPOL Annex VI); 2011.



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maljković, M.; Pavić, I.; Meštrović, T.; Perkovič, M. Ship Maneuvering in Shallow and Narrow Waters: Predictive Methods and Model Development Review. J. Mar. Sci. Eng. 2024, 12, 1450. https://doi.org/10.3390/jmse12081450
Maljković M, Pavić I, Meštrović T, Perkovič M. Ship Maneuvering in Shallow and Narrow Waters: Predictive Methods and Model Development Review. Journal of Marine Science and Engineering. 2024; 12(8):1450. https://doi.org/10.3390/jmse12081450
Chicago/Turabian StyleMaljković, Mislav, Ivica Pavić, Toni Meštrović, and Marko Perkovič. 2024. "Ship Maneuvering in Shallow and Narrow Waters: Predictive Methods and Model Development Review" Journal of Marine Science and Engineering 12, no. 8: 1450. https://doi.org/10.3390/jmse12081450
APA StyleMaljković, M., Pavić, I., Meštrović, T., & Perkovič, M. (2024). Ship Maneuvering in Shallow and Narrow Waters: Predictive Methods and Model Development Review. Journal of Marine Science and Engineering, 12(8), 1450. https://doi.org/10.3390/jmse12081450