


Horizontal Refraction Effects of Sound Propagation Within Continental Shelf Slope Environment: Modeling and Theoretical Analysis


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Modeling
2.1. Three-Dimensional Coupled Model
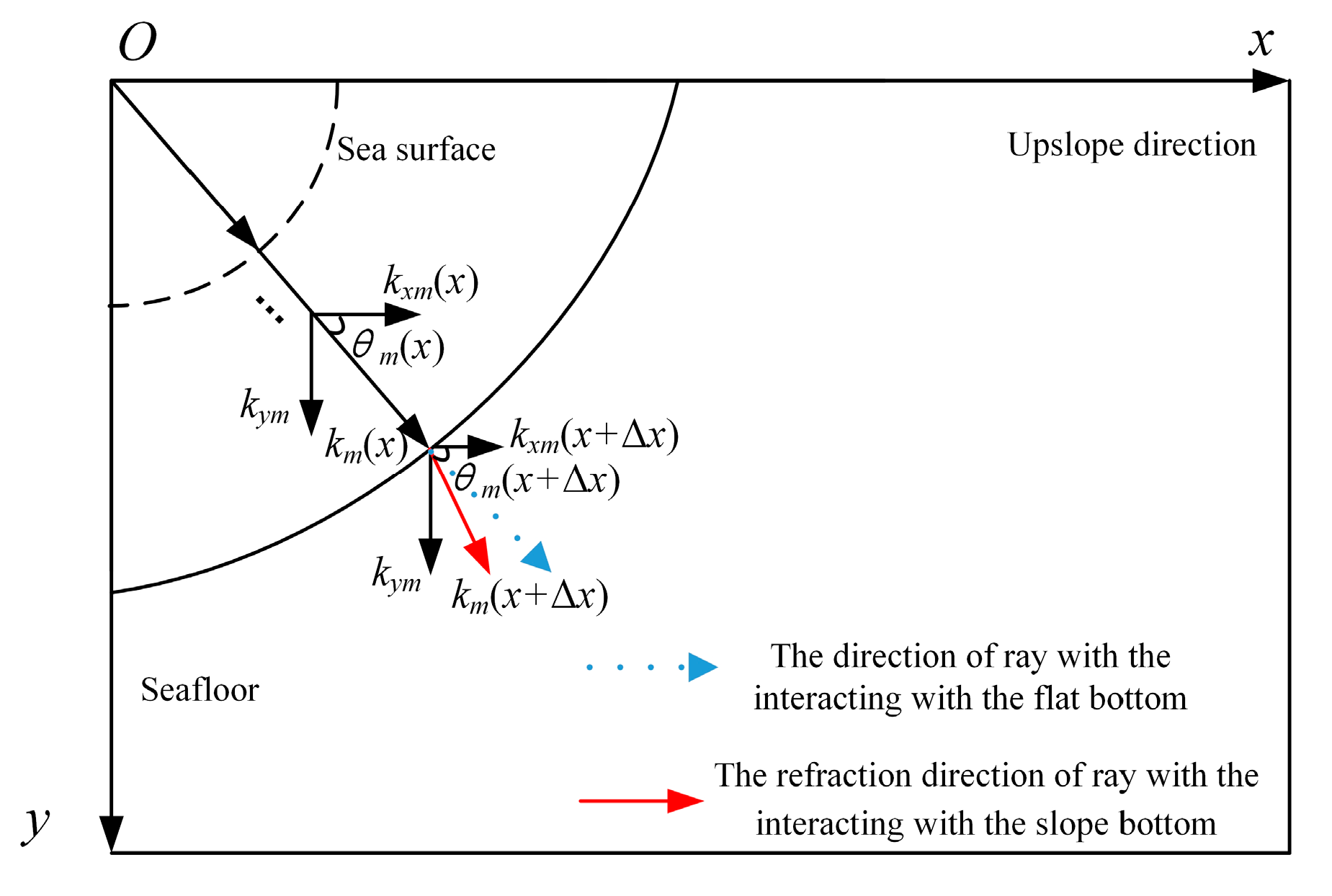
2.2. Horizontal Refraction with the Coupled-Mode Theory
3. Simulation Results
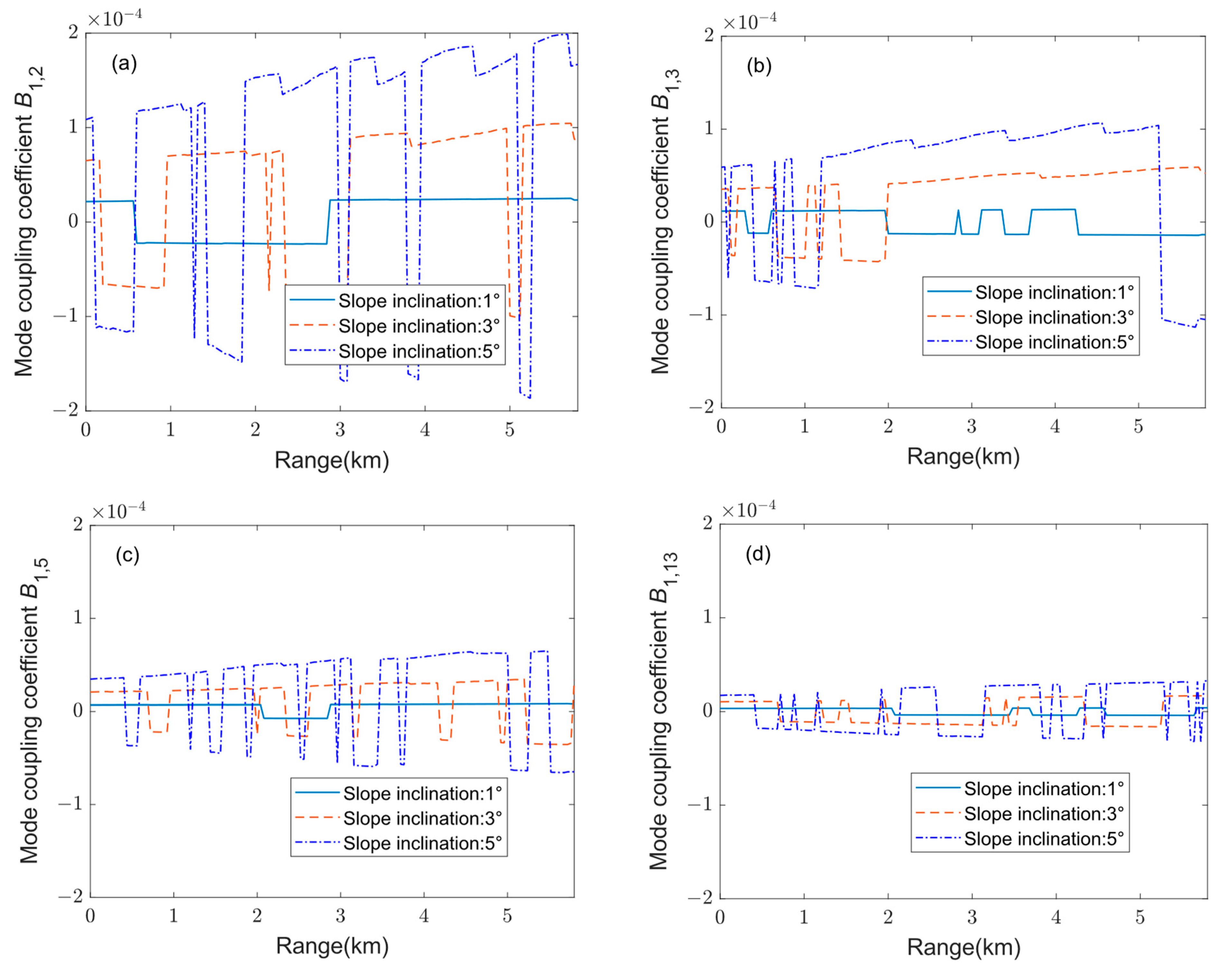
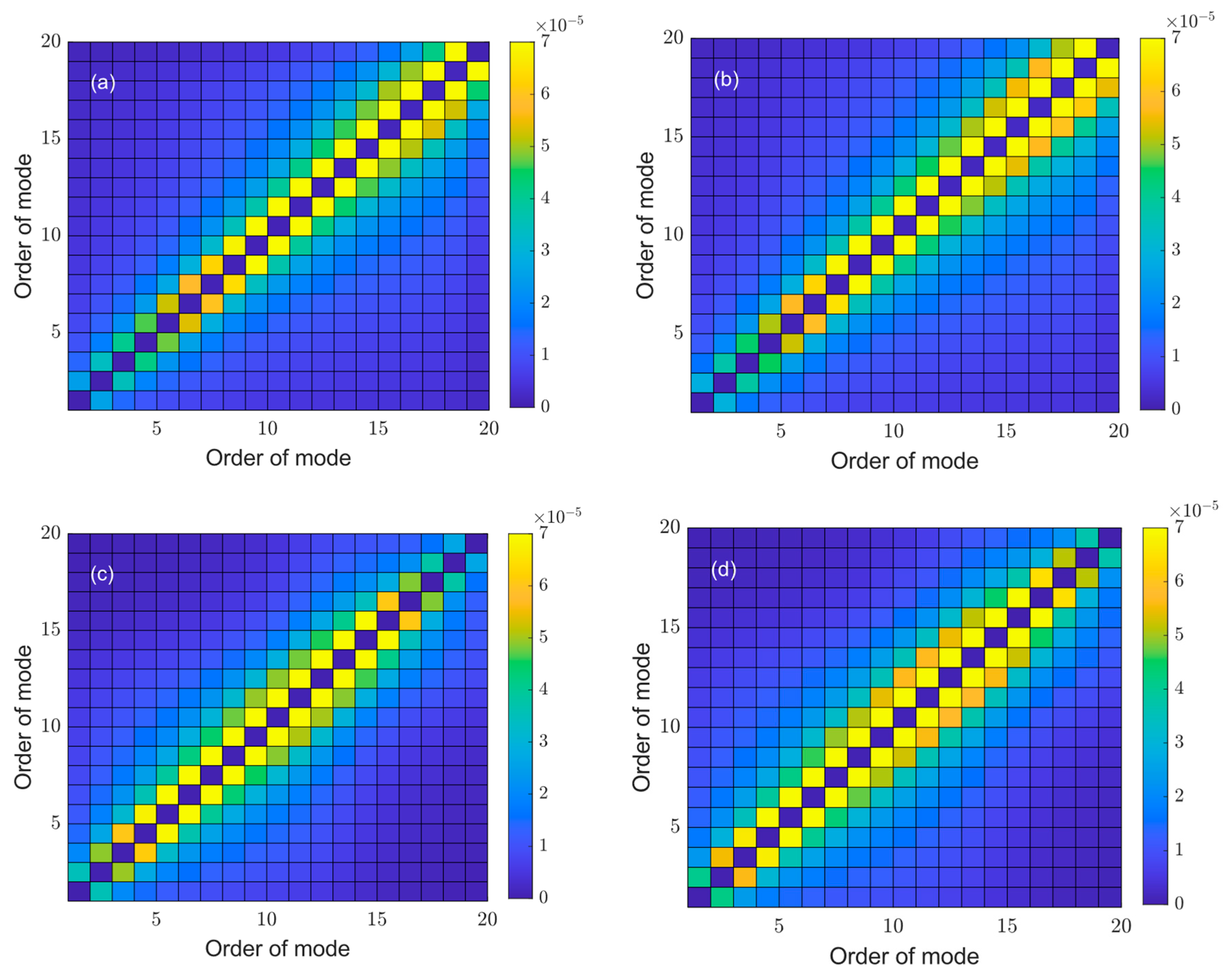
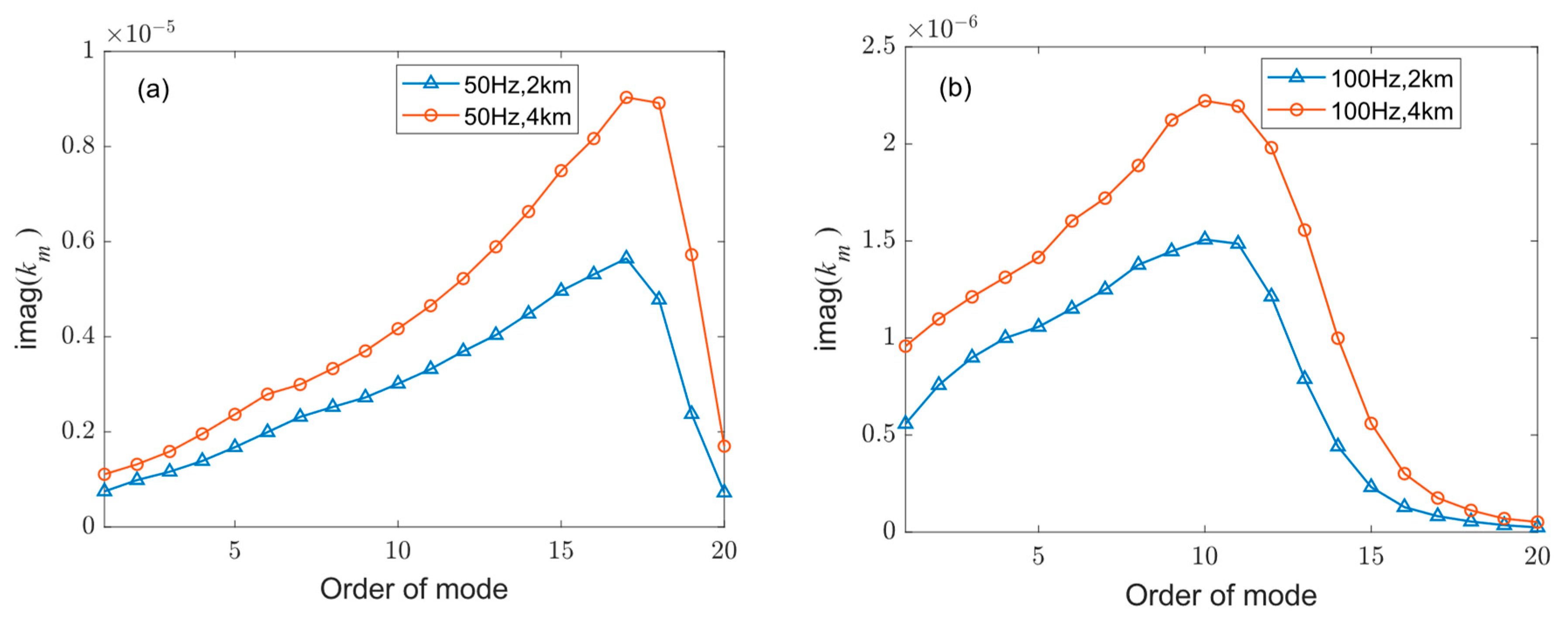
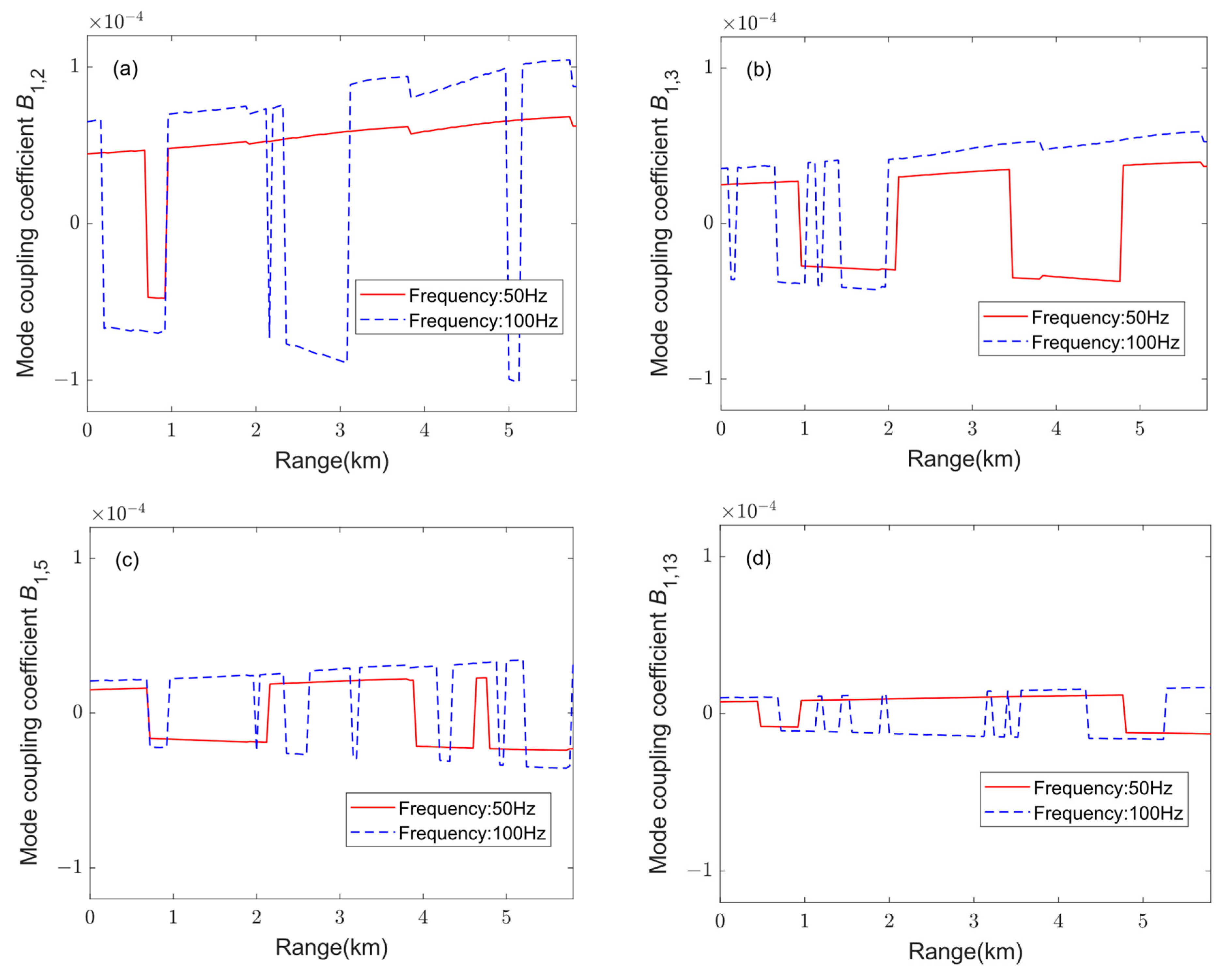
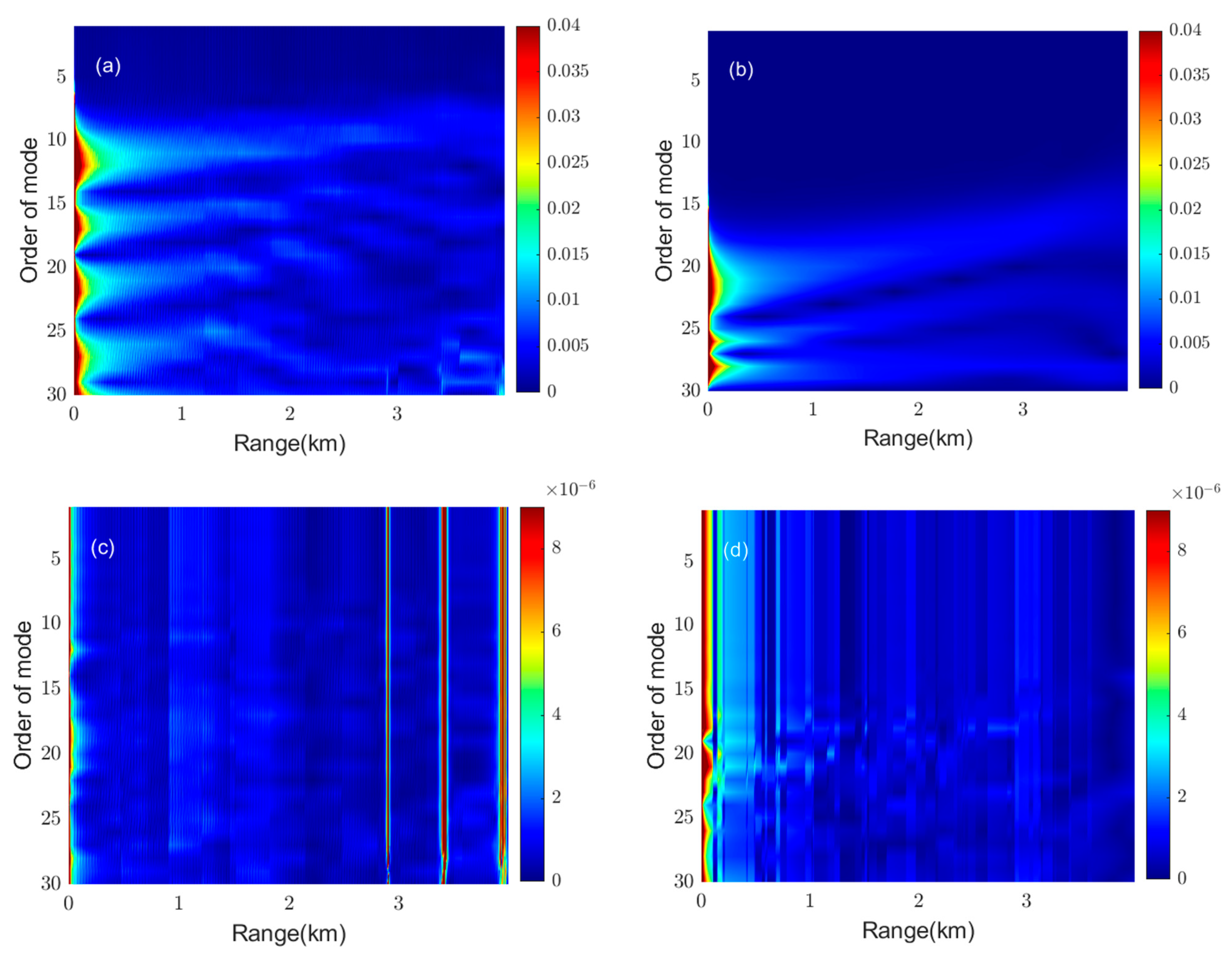
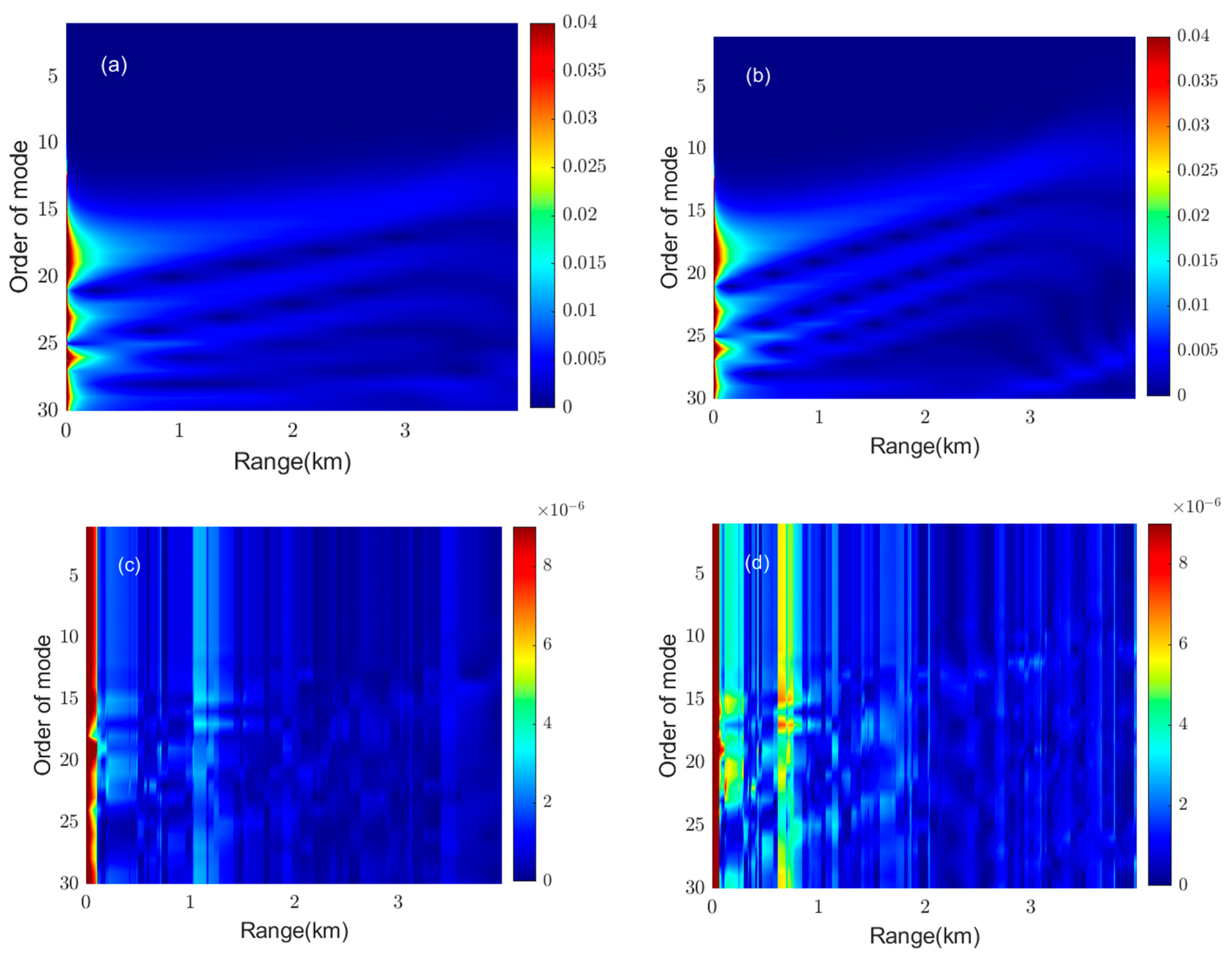
3.1. Mode Coupling Coefficients
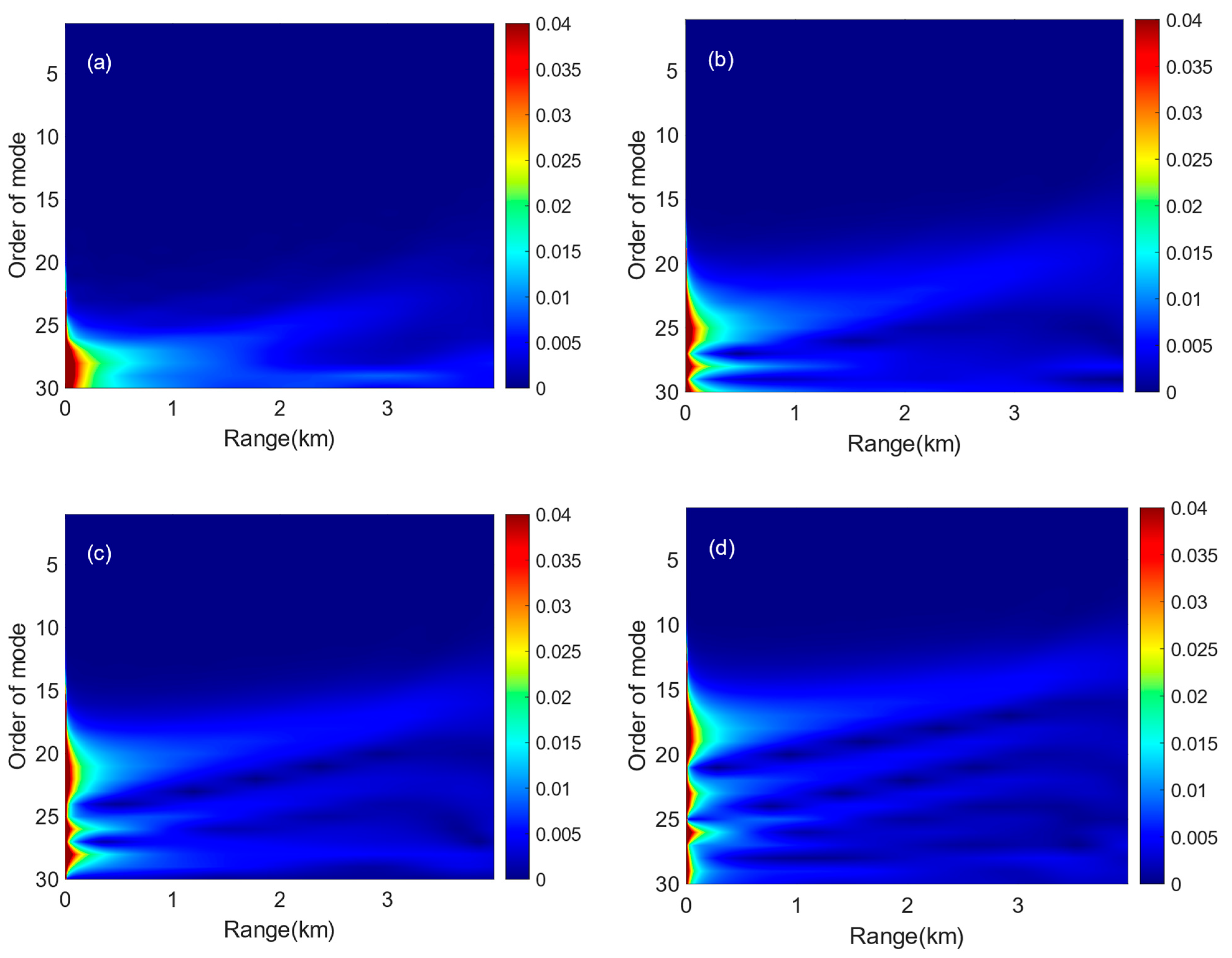
3.2. Effect of Mode Coupling on the Horizontal Refraction
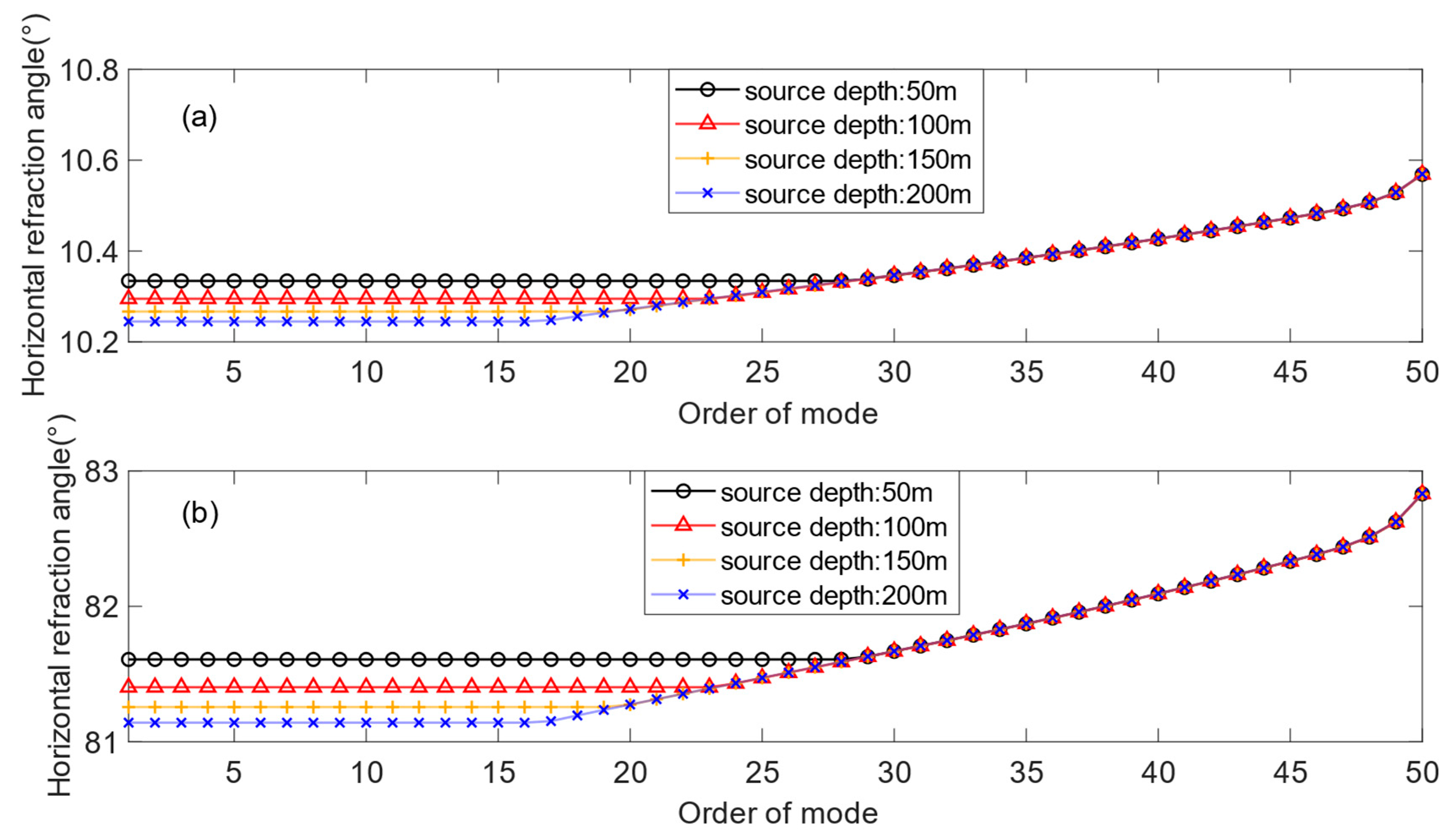
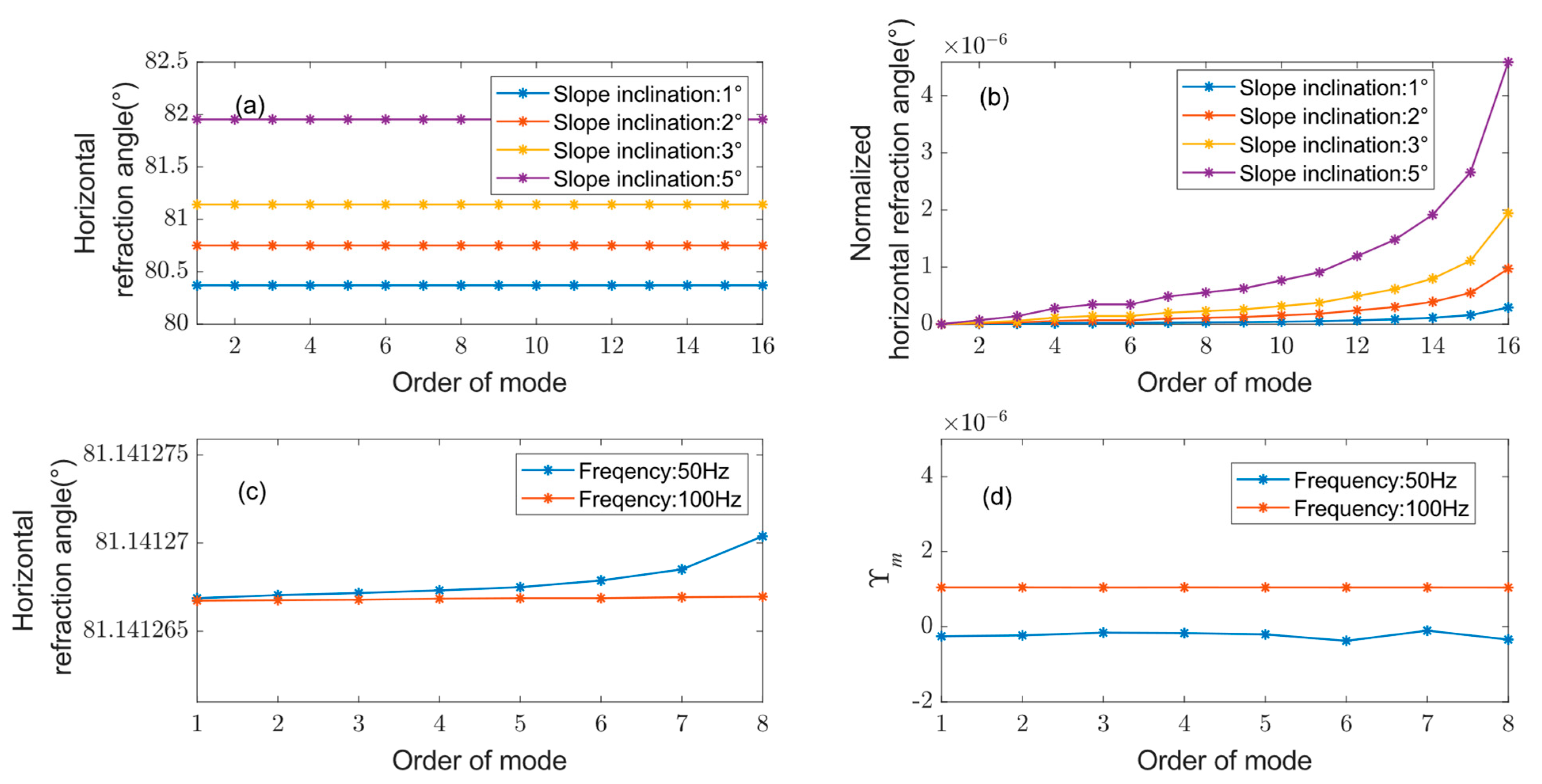
3.3. Horizontal Refraction Angle
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Weston, D.E. Horizontal refraction in a three-dimensional medium of variable stratification. J. Acoust. Soc. Am. 1961, 78, 46. [Google Scholar] [CrossRef]
- Harrison, C.H. Three-dimensional ray paths in basins, troughs, and near seamounts by use of ray invariants. J. Acoust. Soc. Am. 1977, 62, 1382–1388. [Google Scholar] [CrossRef]
- Harrison, C.H. Acoustic shadow zones in the horizontal plane. J. Acoust. Soc. Am. 1979, 65, 56–61. [Google Scholar] [CrossRef]
- Buckingham, M.J. Theory of acoustic propagation around a conical seamount. J. Acoust. Soc. Am. 1986, 80, 265–277. [Google Scholar] [CrossRef]
- Luo, W.; Schmidt, H. Three-dimensional propagation and scattering around a conical seamount. J. Acoust. Soc. Am. 2009, 125, 52–65. [Google Scholar] [CrossRef]
- Arnold, J.M.; Felson, L.B. Rigorous Theory of Horizontal Refraction in a Wedge Shaped Ocean. In Progress in Underwater Acoustics; Merklinger, H.M., Ed.; Springer: Boston, MA, USA, 1987; pp. 549–556. [Google Scholar] [CrossRef]
- Jensen, F.B.; Kuperman, W.A. Sound propagation in a wedge-shaped ocean with a penetrable bottom. J. Acoust. Soc. Am. 1980, 67, 1564–1566. [Google Scholar] [CrossRef]
- Westwood, E.K. Broadband modeling of the three-dimensional penetrable wedge. J. Acoust. Soc. Am. 1992, 92, 2212–2222. [Google Scholar] [CrossRef]
- Deane, G.B.; Buckingham, M.J. An analysis of the three-dimensional sound field in a penetrable wedge with a stratified fluid or elastic basement. J. Acoust. Soc. Am. 1993, 93, 1319–1328. [Google Scholar] [CrossRef]
- Tang, J.; Petrov, P.S.; Piao, S.; Kozitskiy, S.B. On the Method of Source Images for the Wedge Problem Solution in Ocean Acoustics: Some Corrections and Appendices. Acoust. Phys. 2018, 64, 225–236. [Google Scholar] [CrossRef]
- Weinberg, H.; Burridge, R. Horizontal ray theory for ocean acoustics. J. Acoust. Soc. Am. 1974, 55, 63–79. [Google Scholar] [CrossRef]
- Heaney, K.D.; Campbell, R.L.; Murray, J.J. Comparison of hybrid three-dimensional modeling with measurements on the continental shelf. J. Acoust. Soc. Am. 2012, 131, 1680–1688. [Google Scholar] [CrossRef] [PubMed]
- Lin, Y.; Uffelen, L.J.V.; Miller, J.H.; Potty, G.R.; Vigness-Raposa, K.J. Horizontal refraction and diffraction of underwater sound around an island. J. Acoust. Soc. Am. 2022, 151, 1684–1694. [Google Scholar] [CrossRef]
- McDonald, B.E.; Collins, M.D.; Kuperman, W.A.; Heaney, K.D. Comparison of data and model predictions for Heard Island acoustic transmissions. J. Acoust. Soc. Am. 1994, 96, 2357–2370. [Google Scholar] [CrossRef]
- Dong, Y.; Piao, S.; Gong, L. Effect of three-dimensional seamount topography on very low frequency sound field in deep water. J. Harbin Eng. Univ. 2020, 41, 1464–1470. [Google Scholar] [CrossRef]
- Heaney, K.D.; Campbell, R.L. Three-dimensional parabolic equation modeling of mesoscale eddy deflection. J. Acoust. Soc. Am. 2016, 139, 918–926. [Google Scholar] [CrossRef]
- Pinson, S.; Quilfen, V.; Courtois, F.L.; Real, G.; Fattaccioli, D. Shallow-water waveguide acoustic analysis in a fluctuating environment. J. Acoust. Soc. Am. 2022, 152, 1252–1262. [Google Scholar] [CrossRef]
- Grigor’ev, V.A.; Petnikov, V.G.; Roslyakov, A.G.; Terekhina, Y.E. Sound Propagation in Shallow Water with an Inhomogeneous GAS-Saturated Bottom. Acoust. Phys. 2018, 64, 331–346. [Google Scholar] [CrossRef]
- Lunkov, A.; Sidorov, D.; Petnikov, V. Horizontal Refraction of Acoustic Waves in Shallow-Water Waveguides Due to an Inhomogeneous Bottom Structure. J. Mar. Sci. Eng. 2021, 9, 1269. [Google Scholar] [CrossRef]
- Petnikov, V.G.; Grigorev, V.A.; Lunkov, A.A.; Sidorov, D.D. Modeling underwater sound propagation in an arctic shelf region with an inhomogeneous bottom. J. Acoust. Soc. Am. 2022, 151, 2297–2309. [Google Scholar] [CrossRef]
- Godin, O.A. Manifestations of the weak shear rigidity of marine sediments in amplitudes and travel times of acoustic normal modes and lateral waves. J. Acoust. Soc. Am. 2023, 154 (Suppl. 4), A165. [Google Scholar] [CrossRef]
- Katsnel’son, B.G.; Malykhin, A.Y. Space-time sound field interference in the horizontal plane in a coastal slope region. Acoust. Phys. 2012, 58, 301–307. [Google Scholar] [CrossRef]
- Ballard, M.S.; Lin, Y.; Lynch, J.F. Horizontal refraction of propagating sound due to seafloor scours over a range-dependent layered bottom on the New Jersey shelf. J. Acoust. Soc. Am. 2012, 131, 2587–2598. [Google Scholar] [CrossRef] [PubMed]
- Chaple, R.P.B. Refraction and diffraction of water waves using finite elements with a DNL boundary condition. Ocean. Eng. 2013, 63, 77–89. [Google Scholar] [CrossRef]
- Mignerey, P.C. Environmentally adaptive wedge modes. J. Acoust. Soc. Am. 2000, 107, 1943–1952. [Google Scholar] [CrossRef]
- Joe, K.H. Forward Sound Propagation Around Seamounts: Application of Acoustic Models to the Kermit-Roosevelt and Elvis Seamounts. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2009. Available online: http://hdl.handle.net/1721.1/49764 (accessed on 10 November 2024).
- Luo, W.; Henrik, S. A Spectral Coupled-Mode Formulation for Sound Propagation around Axisymmetric Seamounts. Chin. Phys. Lett. 2010, 27, 094304. [Google Scholar] [CrossRef]
- Tang, J. Modelling of Sound Propagation in Wedge-Like Oceans with Elastic Bottom and Analyzing of Horizontal Refraction Effects on Vector Fields. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2019. [Google Scholar]
- Luo, W.; Zhang, R.; Schmidt, H. Three-dimensional mode coupling around a seamount. Sci. China Phys. Mech. Astron. 2011, 54, 1561. [Google Scholar] [CrossRef]
- Mo, Y.; Piao, S.; Zhang, H.; Li, L. Mode coupling and energy transfer in a range-dependent waveguide. Acta Phys. Sin. 2014, 63, 214302. [Google Scholar] [CrossRef]
- Heaney, K.D.; Murray, J.J. Measurements of three-dimensional propagation in a continental shelf environment. J. Acoust. Soc. Am. 2009, 125, 1394–1402. [Google Scholar] [CrossRef]
- Wang, D.; Shang, E. Hydroacoustics, 2nd ed.; Science Press: Beijing, China, 2006; pp. 92–98. [Google Scholar]
- Tindle, C.T.; Guthrie, K.M. Rays as interfering modes in underwater acoustics. J. Sound Vib. 1974, 34, 291–295. [Google Scholar] [CrossRef]
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H. Computational Ocean Acoustics, 2nd ed.; Springer: New York, NY, USA, 2011; Chapter 5; p. 342. [Google Scholar]
- World Ocean Sound Speed Database. Available online: https://climatedataguide.ucar.edu/climate-data/world-ocean-atlas-woa09 (accessed on 21 September 2023).



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Lei, B.; Yang, Y.; Zhou, J. Horizontal Refraction Effects of Sound Propagation Within Continental Shelf Slope Environment: Modeling and Theoretical Analysis. J. Mar. Sci. Eng. 2025, 13, 217. https://doi.org/10.3390/jmse13020217
Wang J, Lei B, Yang Y, Zhou J. Horizontal Refraction Effects of Sound Propagation Within Continental Shelf Slope Environment: Modeling and Theoretical Analysis. Journal of Marine Science and Engineering. 2025; 13(2):217. https://doi.org/10.3390/jmse13020217
Chicago/Turabian StyleWang, Jinci, Bo Lei, Yixin Yang, and Jianbo Zhou. 2025. "Horizontal Refraction Effects of Sound Propagation Within Continental Shelf Slope Environment: Modeling and Theoretical Analysis" Journal of Marine Science and Engineering 13, no. 2: 217. https://doi.org/10.3390/jmse13020217
APA StyleWang, J., Lei, B., Yang, Y., & Zhou, J. (2025). Horizontal Refraction Effects of Sound Propagation Within Continental Shelf Slope Environment: Modeling and Theoretical Analysis. Journal of Marine Science and Engineering, 13(2), 217. https://doi.org/10.3390/jmse13020217