

LT-Sync: A Lightweight Time Synchronization Scheme for High-Speed Mobile Underwater Acoustic Sensor Networks


Abstract
:1. Introduction
2. Description of Time Synchronization Scheme
2.1. Synchronization Process
2.2. Propagation Delay Estimation
- (1)
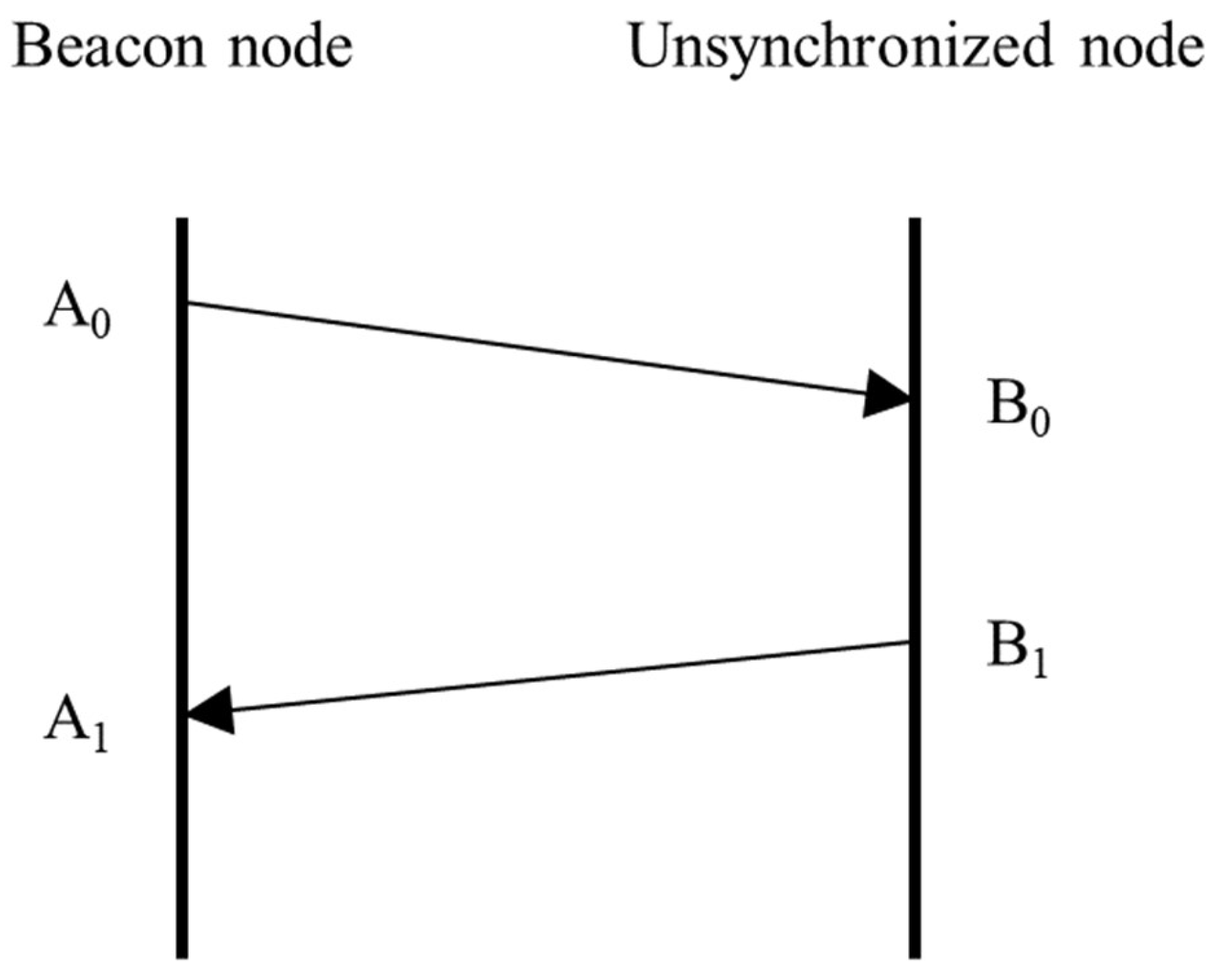
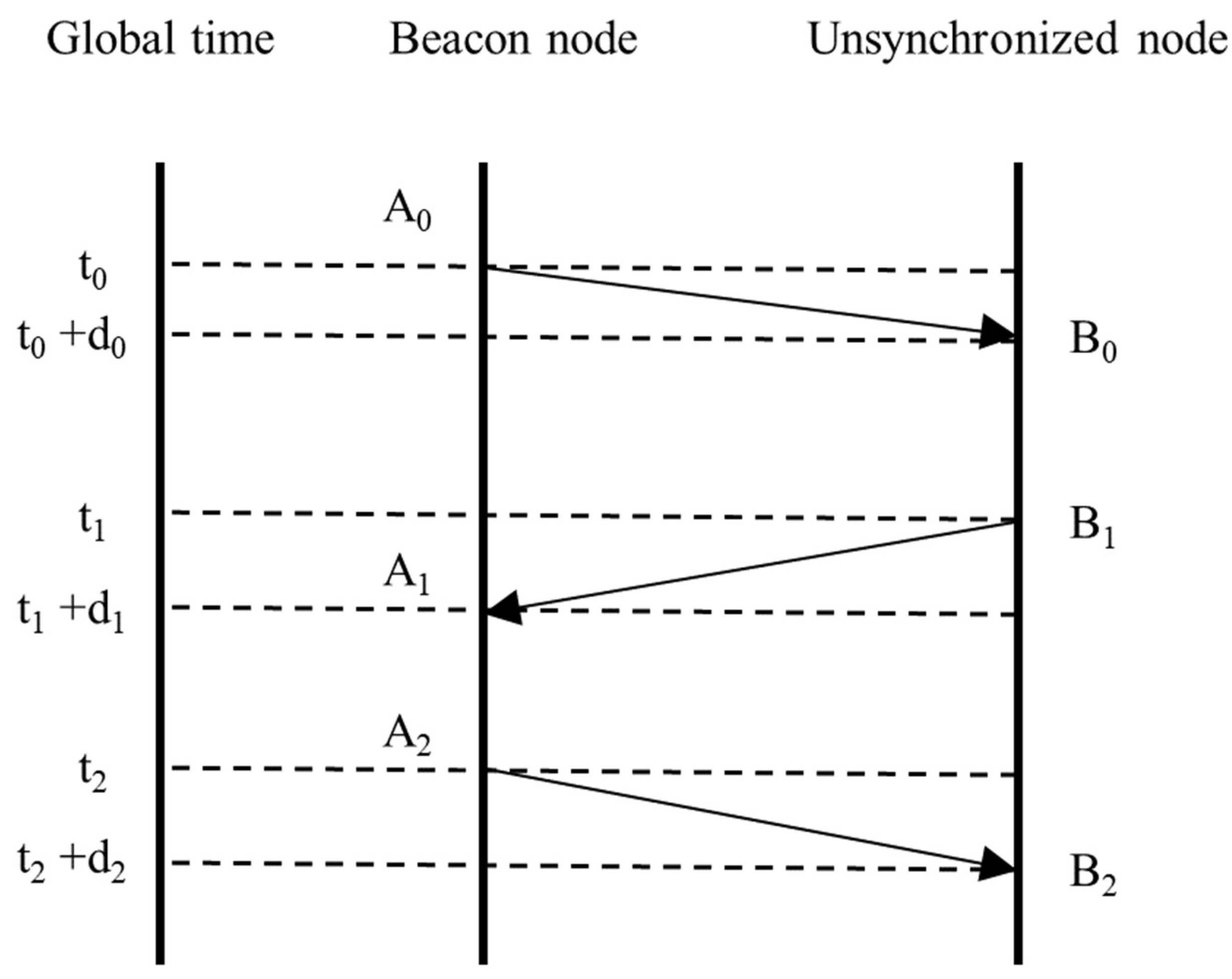
- To start with, the beacon node sends a wake-up signal, including the captured timestamp A0, to the unsynchronized node. At the same time, the unsynchronized node immediately moves in a uniform straight line at its current speed and captures its own receive timestamp B0.
- (2)
- Then, the unsynchronized node saves the transmit timestamp B1 and sends it to the beacon node after a waiting interval, and the beacon node records the receive timestamp A1. At the same time, the beacon node can obtain the Doppler shift by demodulating the signal from the unsynchronized node.
- (3)
- After that, the beacon node sends the third message and puts the transmit timestamps A2 and A1, together with the Doppler shift, into the message, and the unsynchronized node receives the third message with the transmit timestamp B2.
- (4)
- Finally, the unsynchronized node has received six timestamps and the Doppler shift, having the conditions to figure out α and β, which means the process of LT-Sync is completed.
3. UWA Spread-Spectrum Signal Reception Method
3.1. UWA Signal Reception Model
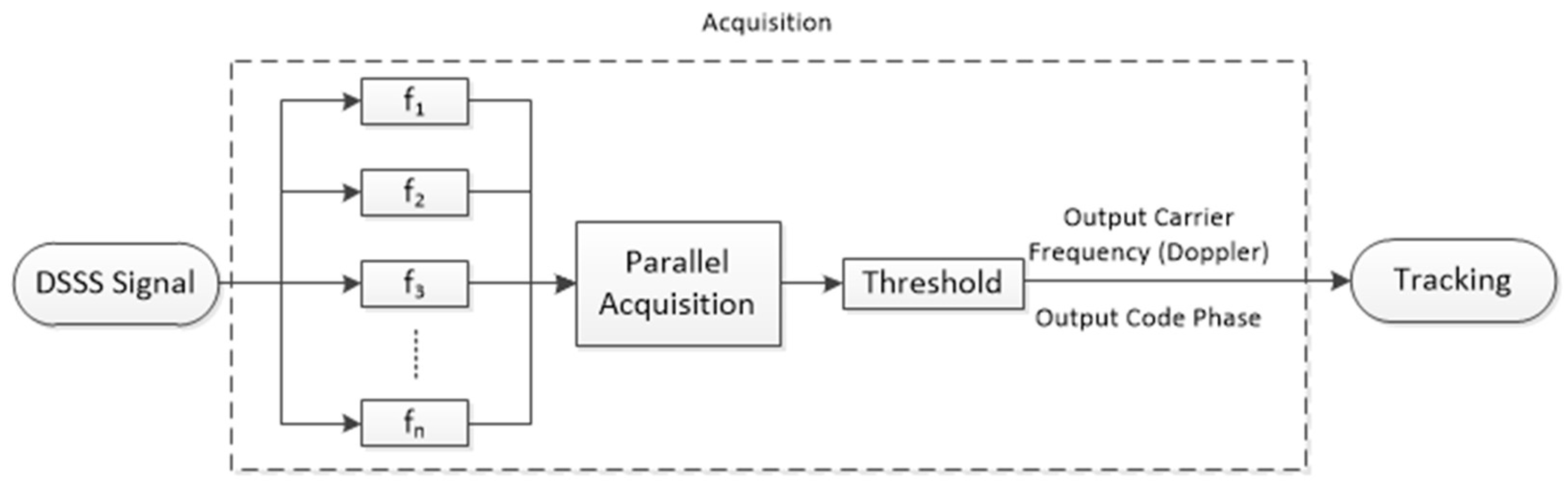
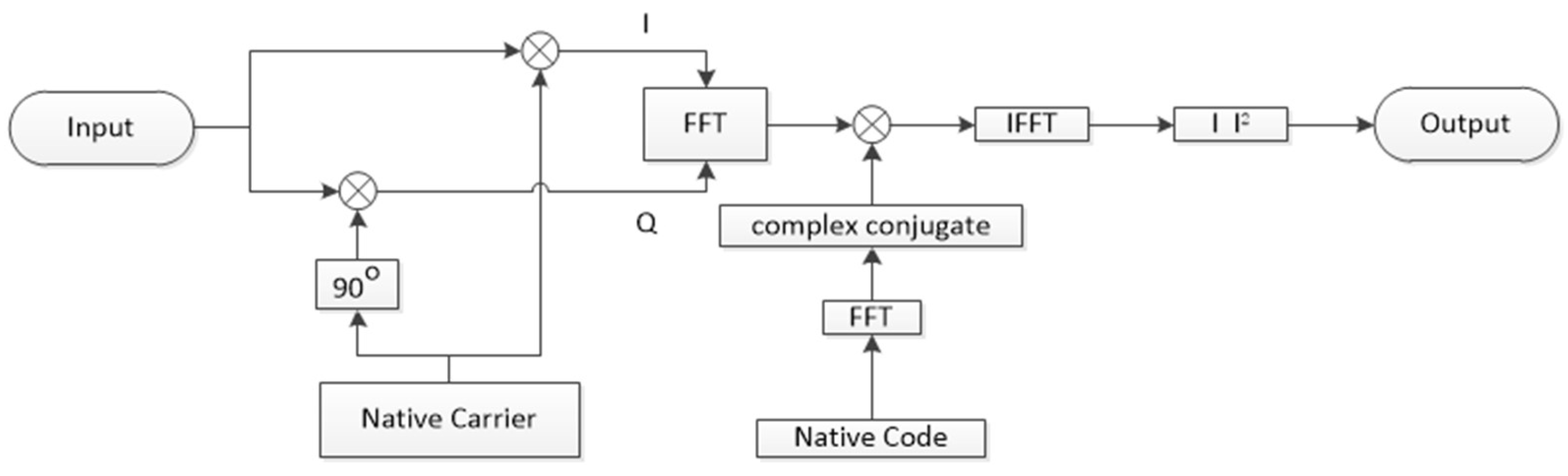
3.2. Acquisition Algorithm
4. Simulation Results
4.1. Description of BELLHOP
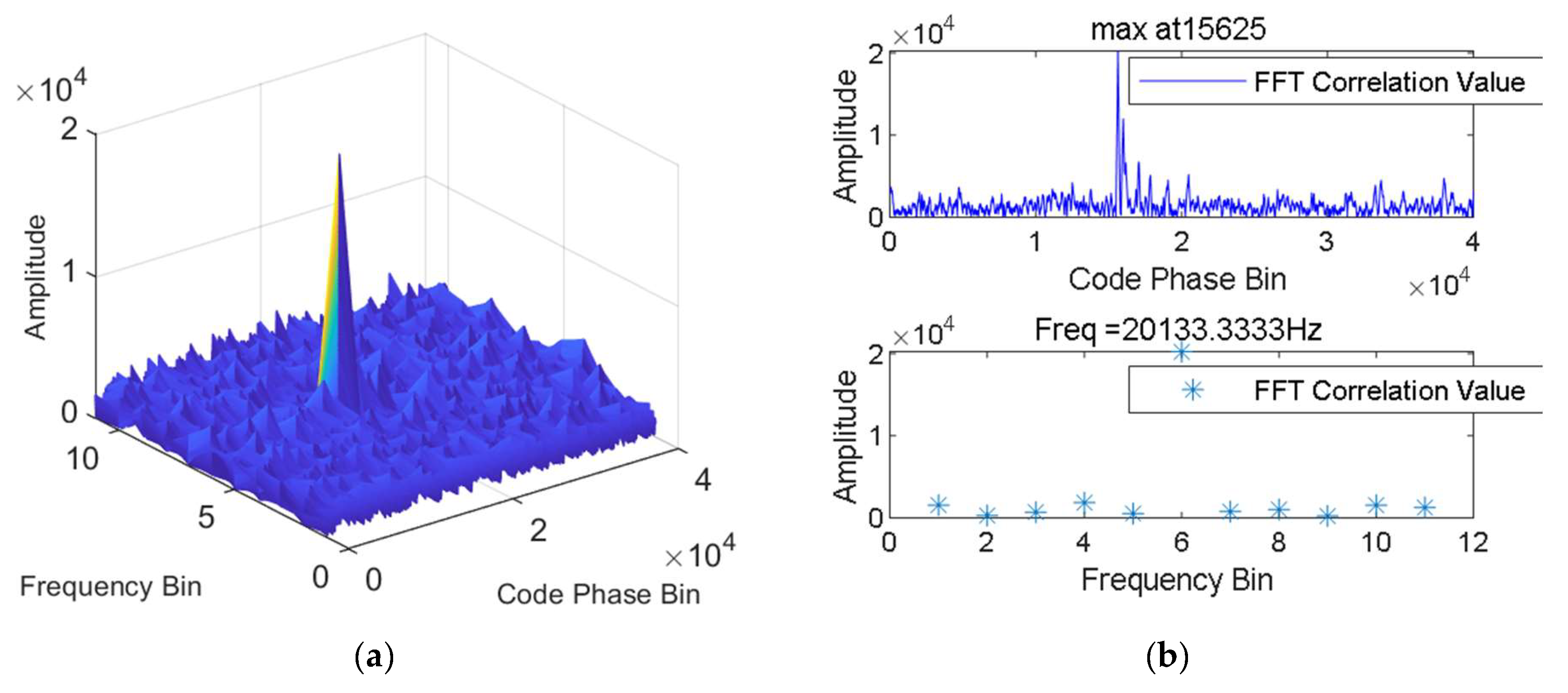
4.2. Acquisition of Underwater Acoustic Spread-Spectrum Signal
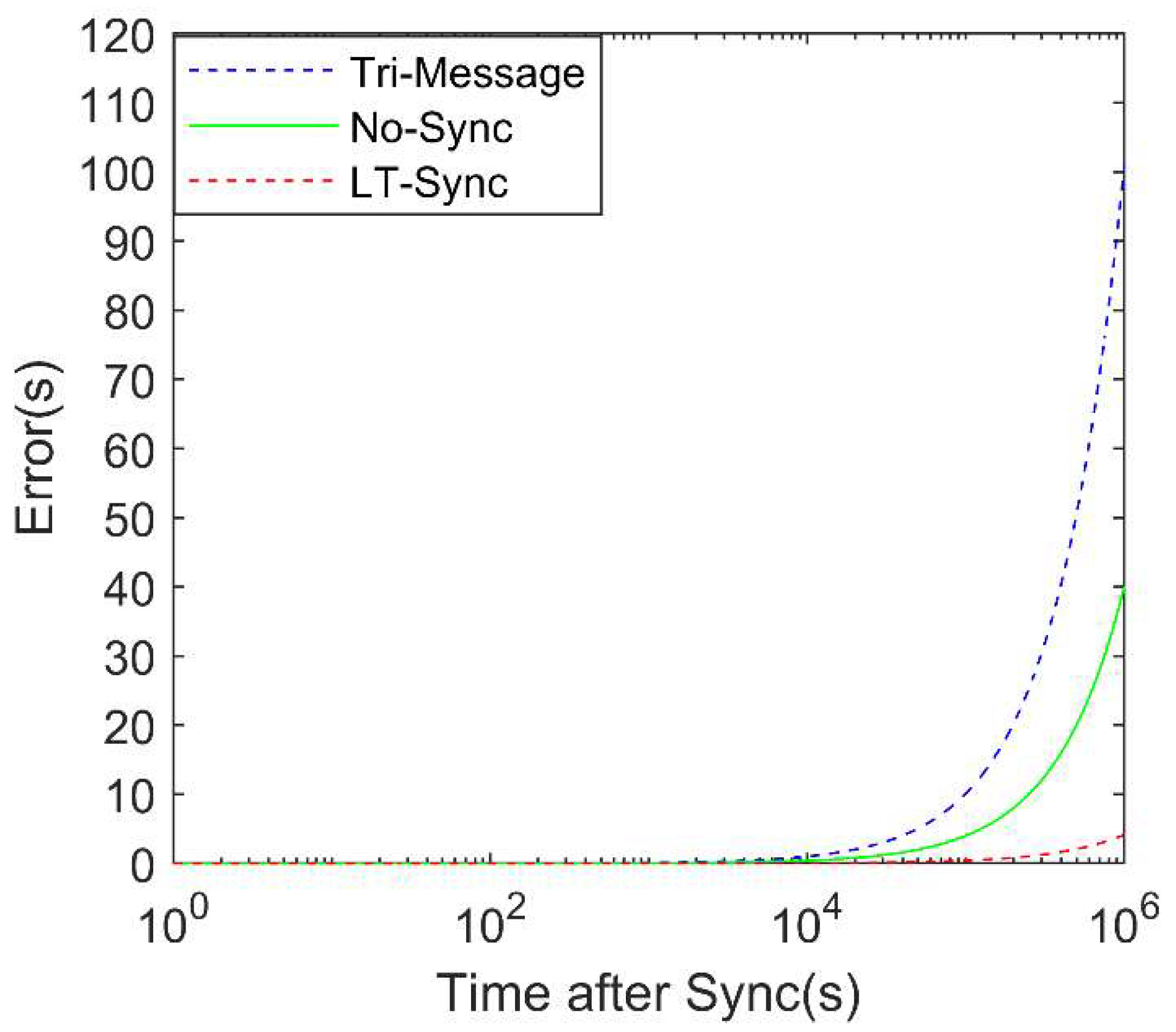
4.3. Performance Evaluation of LT-Sync
5. Conclusions
- (1)
- The approximation from (9) creates a systematic error. Although it does not have a huge impact on synchronization accuracy, as the synchronization interval increases, this error may increase, too.
- (2)
- The way the unsynchronized node moves is specifically designed. When synchronization starts, the direction and speed of the unsynchronized node will not change until synchronization ends. It is hard to constrain movement of nodes in large-scale UWASNs.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, J.; Wang, Z.H.; Cui, J.H.; Zhou, S.L.; Yang, B. A Joint Time Synchronization and Localization Design for Mobile Underwater Sensor Networks. IEEE Trans. Mob. Comput. 2016, 15, 530–543. [Google Scholar] [CrossRef]
- Luo, H.J.; Wu, K.S.; Ruby, R.; Hong, F.; Guo, Z.W.; Ni, L.M. Simulation and Experimentation Platforms for Underwater Acoustic Sensor Networks: Advancements and Challenges. ACM Comput. Surv. 2017, 50, 1–44. [Google Scholar] [CrossRef]
- Vermeij, A.; Munafò, A. A Robust, Opportunistic Clock Synchronization Algorithm for Ad Hoc Underwater Acoustic Networks. IEEE J. Ocean. Eng. 2015, 40, 841–852. [Google Scholar] [CrossRef]
- Tuna, G.; Gungor, V.C. A survey on deployment techniques, localization algorithms, and research challenges for underwater acoustic sensor networks. Int. J. Commun. Syst. 2017, 30, e3350. [Google Scholar] [CrossRef]
- Gong, Z.J.; Li, C.; Jiang, F. AUV-Aided Joint Localization and Time Synchronization for Underwater Acoustic Sensor Networks. IEEE Signal Process. Lett. 2018, 25, 477–481. [Google Scholar] [CrossRef]
- Gardner, A.T.; Collins, J.A. A Second Look at Chip Scale Atomic Clocks for Long Term Precision Timing Four Years in the Field. In Proceedings of the MTS/IEEE Oceans Conference, Monterey, CA, USA, 19–23 September 2016. [Google Scholar]
- Elson, J.; Girod, L.; Estrin, D. Fine-grained network time synchronization using reference broadcasts. In Proceedings of the 5th Symposium on Operation Systems Design and Implementation (OSDI 02), Boston, MA, USA, 9–11 December 2002; pp. 147–163. [Google Scholar]
- Ganeriwal, S.; Kumar, R.; Srivastava, M.B. Timing-sync protocol for sensor networks. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003. [Google Scholar]
- Maróti, M.; Kusy, B.; Simon, G.; Lédeczi, Á. The flooding time synchronization protocol. In Proceedings of the 2nd International Conference on Embedded Network Sensor Systems, Baltimore, MD, USA, 3–5 November 2004. [Google Scholar]
- Syed, A.A.; Heidemann, J. Time Synchronization for High Latency acoustic networks. In Proceedings of the IEEE INFOCOM 2006 Conference/25th IEEE International Conference on Computer Communications, Barcelona, Spain, 23–29 April 2006; pp. 892–903. [Google Scholar]
- Chirdchoo, N.; Soh, W.-S.; Chua, K.C. MU-Sync: A time synchronization protocol for underwater mobile networks. In Proceedings of the 3rd International Workshop on Underwater Networks, San Francisco, CA, USA, 15 September 2008; pp. 35–42. [Google Scholar]
- Lu, F.; Mirza, D.; Schurgers, C. D-sync: Doppler-based time synchronization for mobile underwater sensor networks. In Proceedings of the 5th International Workshop on Underwater Networks, Woods Hole, MA, USA, 30 September–1 October 2010. Article 3. [Google Scholar]
- Liu, J.; Wang, Z.H.; Zuba, M.; Peng, Z.; Cui, J.H.; Zhou, S.L. DA-Sync: A Doppler-Assisted Time-Synchronization Scheme for Mobile Underwater Sensor Networks. IEEE Trans. Mob. Comput. 2014, 13, 582–595. [Google Scholar] [CrossRef]
- Zhou, F.; Wang, Q.; Nie, D.; Qiao, G. DE-Sync: A Doppler-Enhanced Time Synchronization for Mobile Underwater Sensor Networks. Sensors 2018, 18, 1710. [Google Scholar] [CrossRef] [PubMed]
- Zhou, F.; Wang, Q.; Han, G.J.; Qiao, G.; Sun, Z.X.; Niaz, A. APE-Sync: An Adaptive Power Efficient Time Synchronization for Mobile Underwater Sensor Networks. IEEE Access 2019, 7, 52379–52389. [Google Scholar] [CrossRef]
- Tian, C.; Jiang, H.B.; Liu, X.; Wang, X.B.; Liu, W.Y.; Wang, Y. Tri-Message: A Lightweight Time Synchronization Protocol for High Latency and Resource-Constrained Networks. In Proceedings of the 2009 IEEE International Conference on Communications (ICC 2009), Dresden, Germany, 14–18 June 2009; pp. 1–5. [Google Scholar]
- Ouyang, Y.J.; Han, Y.F.; Wang, Z.Y.; He, Y.F. Underwater Network Time Synchronization Method Based on Probabilistic Graphical Models. J. Mar. Sci. Eng. 2024, 12, 2079. [Google Scholar] [CrossRef]
- Sun, D.J.; Ouyang, Y.J.; Han, Y.F. DC-Sync: A Doppler-Compensation Time-Synchronization Scheme for Complex Mobile Underwater Sensor Networks. IEEE Access 2024, 12, 94643–94653. [Google Scholar] [CrossRef]
- Wang, X.R.; Su, Y.S.; Fan, R. SFDM: A time-synchronization-free detection mechanism for mobile underwater acoustic sensor networks. Ocean Eng. 2024, 311, 118983. [Google Scholar] [CrossRef]
- Zhou, F.; Zhang, W.B.; Zhang, B.S.; Nie, D.H.; Wang, Y.; Liu, B. Underwater Acoustic Spread Spectrum Communications Based on Space-Time Cluster Processing. J. Electron. Inf. Technol. 2022, 44, 2006–2013. [Google Scholar] [CrossRef]
- Li, Y.; Liu, B.; Jia, N.; Huang, J.C.; Xiao, D.; Guo, S.M. A Study of Mapping Sequences Spread Spectrum Underwater Acoustic Communications Using Gold Codes. In Proceedings of the 15th ACM International Conference on Underwater Networks & Systems, Shenzhen, China, 23–26 November 2021. [Google Scholar]
- Hu, Y.H.; Han, S.P.; Liu, J.B.; Zhang, Q.; Zhang, Y.H. Combination Differential Direct Sequence Spread Spectrum Algorithm for Mobile Underwater Acoustic Communication. J. Electron. Inf. Technol. 2022, 44, 2024–2034. [Google Scholar] [CrossRef]
- Shu, X.J.; Wang, J.; Wang, H.B.; Yang, X.X. Chaotic direct sequence spread spectrum for secure underwater acoustic communication. Appl. Acoust. 2016, 104, 57–66. [Google Scholar] [CrossRef]
- Du, P.Y.; Xiong, S.J.; Wang, C. Research on mobile spread spectrum underwater acoustic communication. In Proceedings of the IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Dalian, China, 20–22 September 2019. [Google Scholar]
- Lasassmeh, S.M.; Conrad, J.M. Time Synchronization in Wireless Sensor Networks: A Survey. In Proceedings of the IEEE SoutheastCon 2010 Conference on Energizing Our Future, Concord, NC, USA, 18–21 March 2010; pp. 242–245. [Google Scholar]
- Yang, L.; Yang, L.; Ho, K.C. Moving Target Localization in Multistatic Sonar by Differential Delays and Doppler Shifts. IEEE Signal Process. Lett. 2016, 23, 1160–1164. [Google Scholar] [CrossRef]
- Xiao, L.L.; Xuan, G.X.; Wu, Y.B. Research on an Improved Chaotic Spread Spectrum Sequence. In Proceedings of the 3rd IEEE International Conference on Cloud Computing and Big Data Analysis (ICCCBDA), Chengdu, China, 20–22 April 2018; pp. 420–423. [Google Scholar]
- Ra, H.; Youn, C.; Kim, K. High-Reliability Underwater Acoustic Communication Using an M-ary Cyclic Spread Spectrum. Electronics 2022, 11, 1698. [Google Scholar] [CrossRef]
- Sun, K.; Zhou, J.; Mou, J. Design and Performance Analysis of Multi-user Chaotic Sequence Spread-Spectrum Communication System. J. Electron. Inf. Technol. 2007, 29, 2436–2440. [Google Scholar]
- Kim, B.; Kong, S.H. Design of FFT-Based TDCC for GNSS Acquisition. IEEE Trans. Wirel. Commun. 2014, 13, 2798–2808. [Google Scholar] [CrossRef]
- Narykov, A.; Wright, M.; García-Fernández, A.F.; Maskell, S.; Ralph, J.F. Poisson multi-Bernoulli mixture filtering with an active sonar using BELLHOP simulation. In Proceedings of the 25th International Conference of Information Fusion (FUSION), Linkoping, Sweden, 4–7 July 2022. [Google Scholar]
- Ghafoor, H.; Noh, Y.; Koo, I. OFDM-based spectrum-aware routing in underwater cognitive acoustic networks. IET Commun. 2017, 11, 2613–2620. [Google Scholar] [CrossRef]
- Lin, J.Y.; Feng, G.S.; Wen, X.X.; Wang, H.Q.; Lv, H.W.; Zhao, Q.; Han, J.Z. MM-sync: A Mobility Built-in Model Based Time Synchronization Approach for Underwater Sensor Networks. In Proceedings of the 2016 IEEE International Conferences on Big Data and Cloud Computing (BDCloud), Social Computing and Networking (SocialCom), Sustainable Computing and Communications (SustainCom) (BDCloud-SocialCom-SustainCom), Atlanta, GA, USA, 8–10 October 2016; pp. 338–345. [Google Scholar]
- Liu, J.; Wang, Z.H.; Peng, Z.; Zuba, M.; Cui, J.H.; Zhou, S.L. TSMU: A Time Synchronization Scheme for Mobile Underwater Sensor Networks. In Proceedings of the 54th Annual IEEE Global Telecommunications Conference (GLOBECOM), Houston, TX, USA, 5–9 December 2011. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Original distance | 1485 m |
| Speed of unsynchronized node | 15 m/s |
| Speed of sound | 1500 m/s |
| Frequency of synchronization signal | 100 Hz |
| Clock skew | 40 ppm |
| Clock offset | 80 µs |
| Interval between two messages | 5 s |
| Clock granularity | 1 µs |
| Reception jitter | 15 µs |
| Number of messages (TSHL) | 25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Wu, H. LT-Sync: A Lightweight Time Synchronization Scheme for High-Speed Mobile Underwater Acoustic Sensor Networks. J. Mar. Sci. Eng. 2025, 13, 528. https://doi.org/10.3390/jmse13030528
Zhang C, Wu H. LT-Sync: A Lightweight Time Synchronization Scheme for High-Speed Mobile Underwater Acoustic Sensor Networks. Journal of Marine Science and Engineering. 2025; 13(3):528. https://doi.org/10.3390/jmse13030528
Chicago/Turabian StyleZhang, Chenyu, and Huabing Wu. 2025. "LT-Sync: A Lightweight Time Synchronization Scheme for High-Speed Mobile Underwater Acoustic Sensor Networks" Journal of Marine Science and Engineering 13, no. 3: 528. https://doi.org/10.3390/jmse13030528
APA StyleZhang, C., & Wu, H. (2025). LT-Sync: A Lightweight Time Synchronization Scheme for High-Speed Mobile Underwater Acoustic Sensor Networks. Journal of Marine Science and Engineering, 13(3), 528. https://doi.org/10.3390/jmse13030528