
Research on the Hydroelasto-Plasticity Method and Its Application in Collapse Analyses of Ship Structures


Abstract
:1. Introduction
2. Fluid–Structure Interaction Equations
3. Hydroelasto-Plasticity Analysis System
3.1. Structural Response Analysis Method
3.2. Hydrodynamic Loads Analysis Method
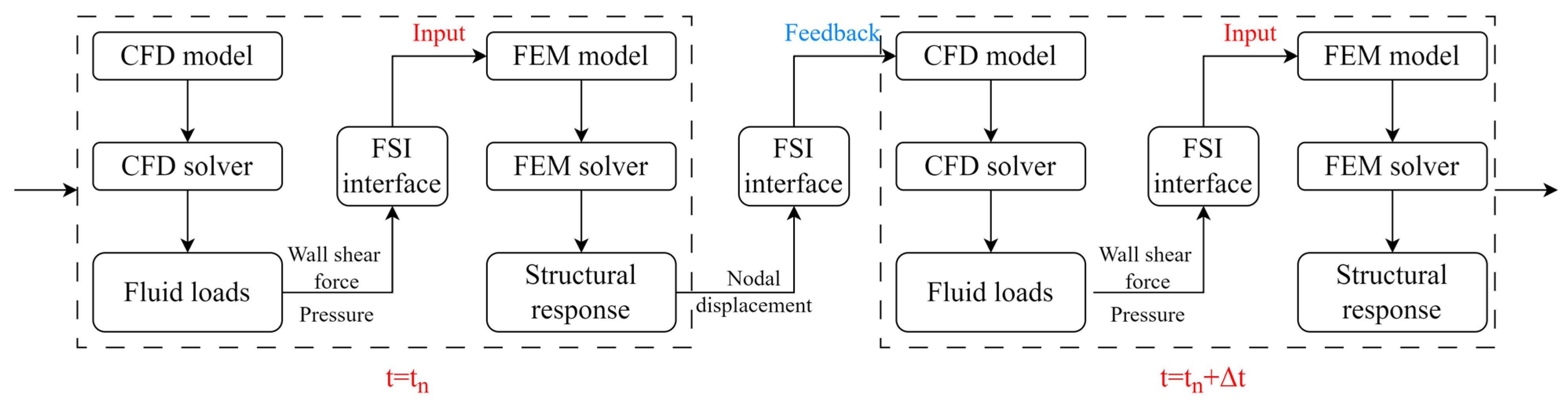
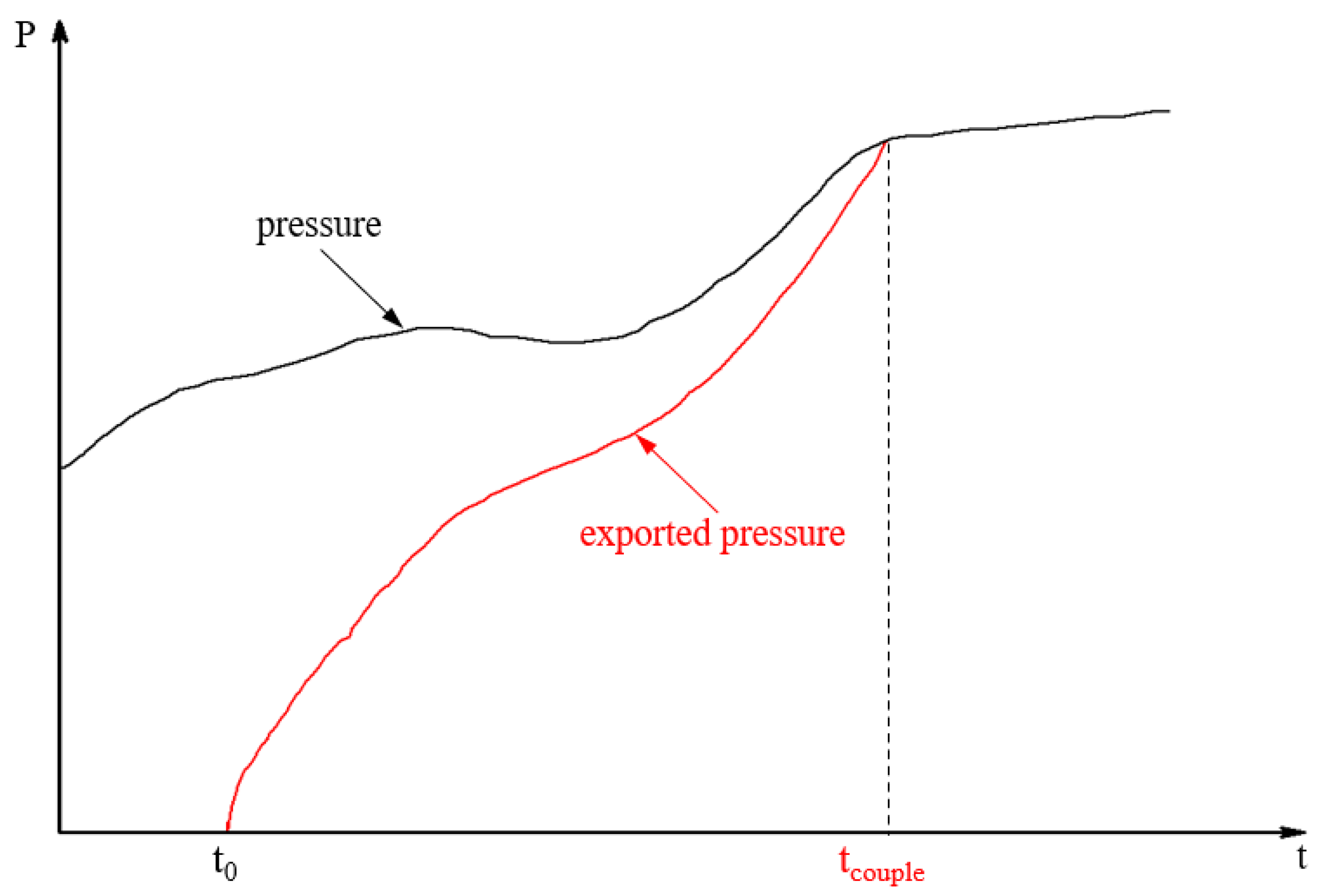
3.3. Co-Simulation Technology
4. Hydroelasto-Plastic Response Analysis for Ship Structures
4.1. Research Object
4.2. Numerical Calculation
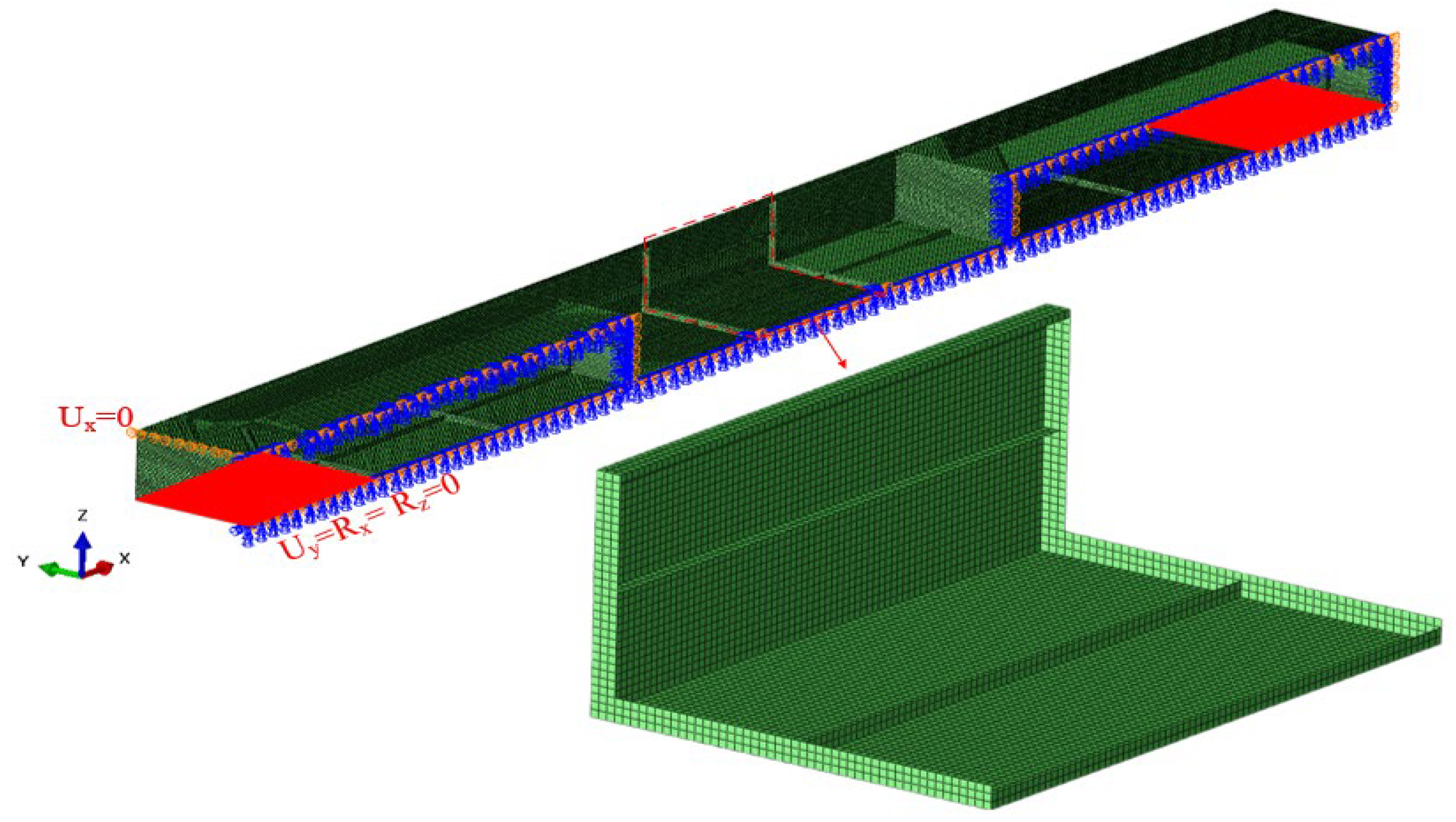
4.2.1. FEM Model
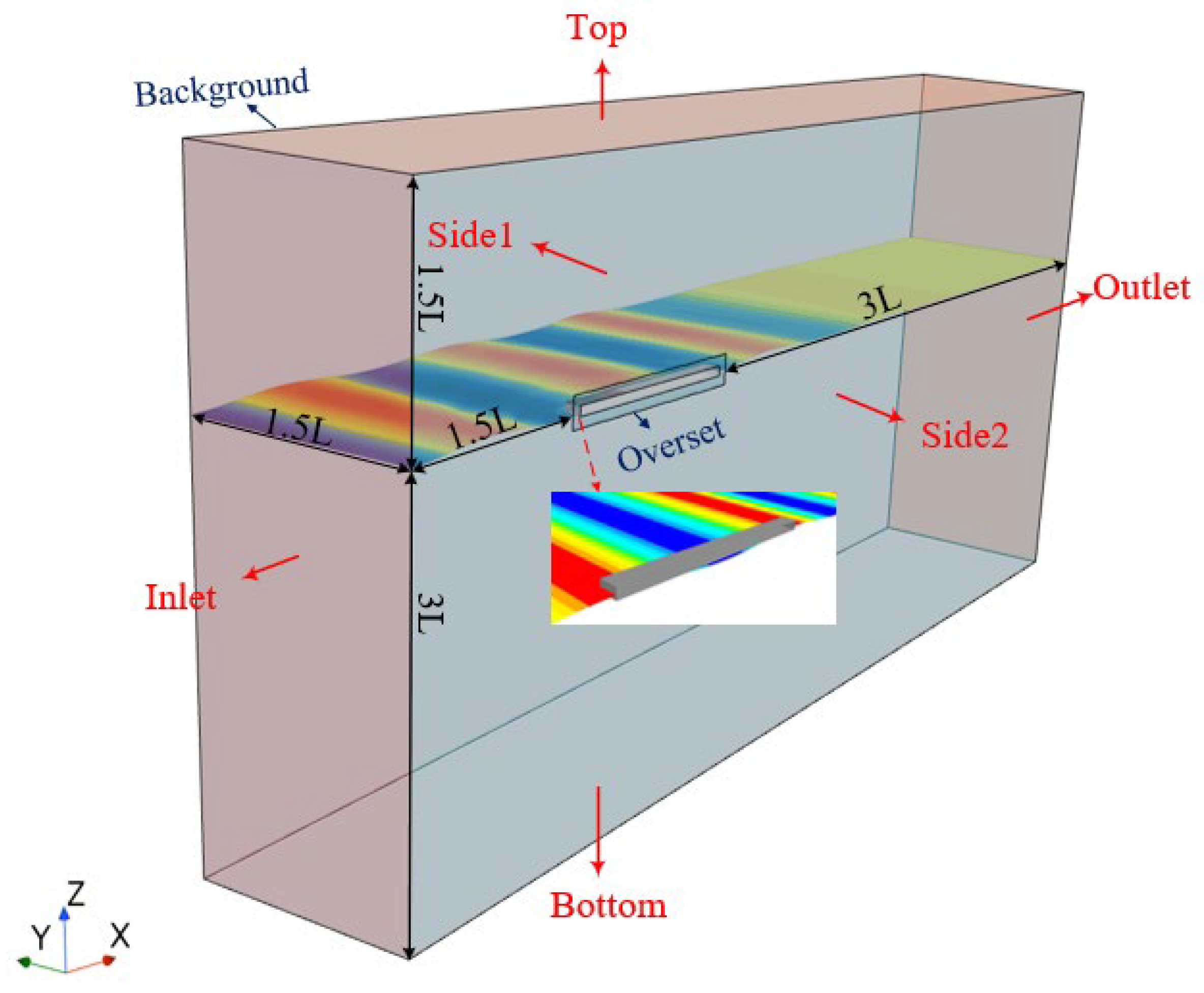
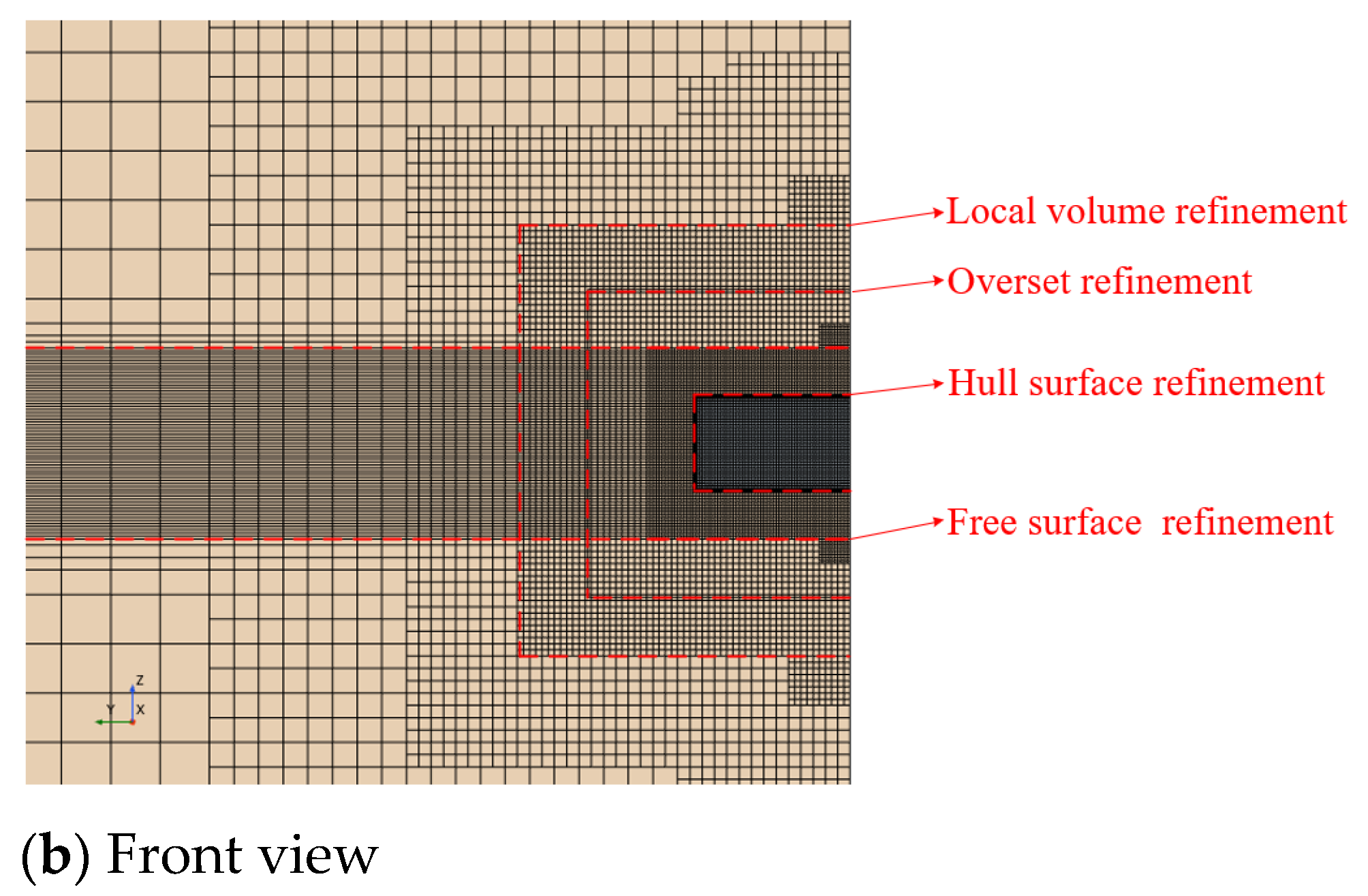
4.2.2. CFD Model
4.3. Result Analysis
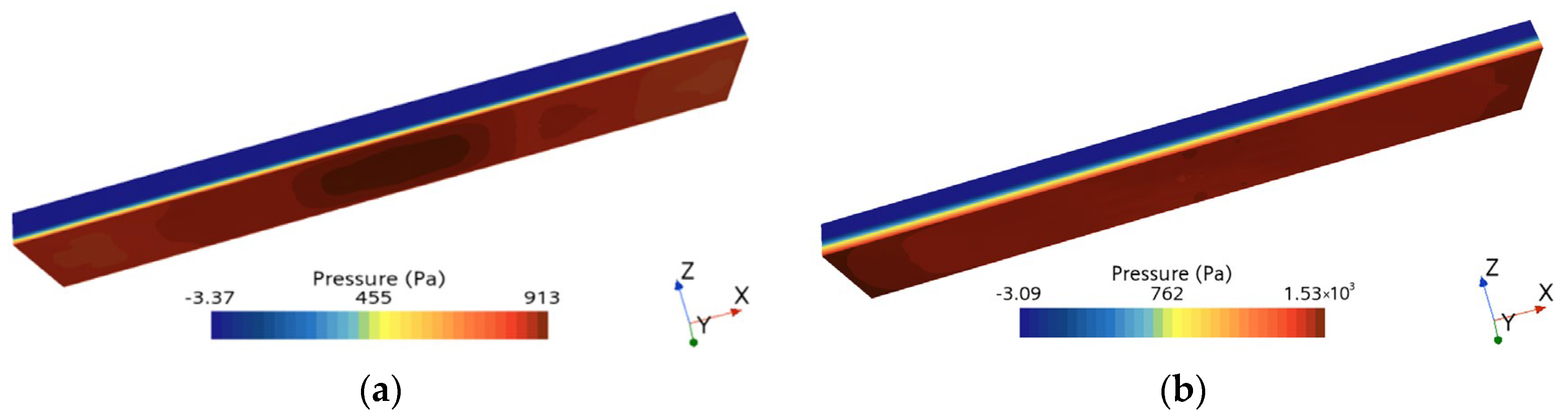
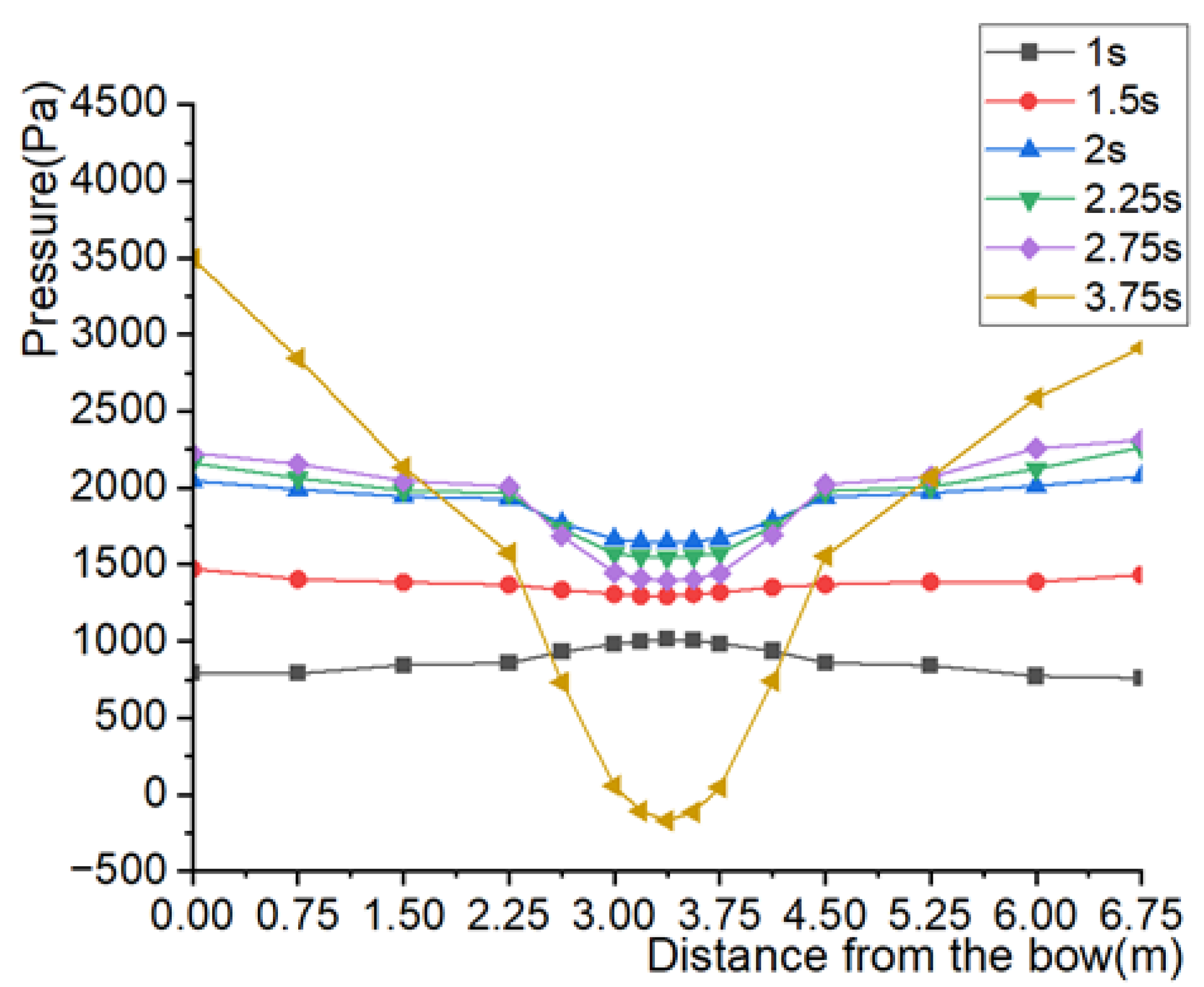
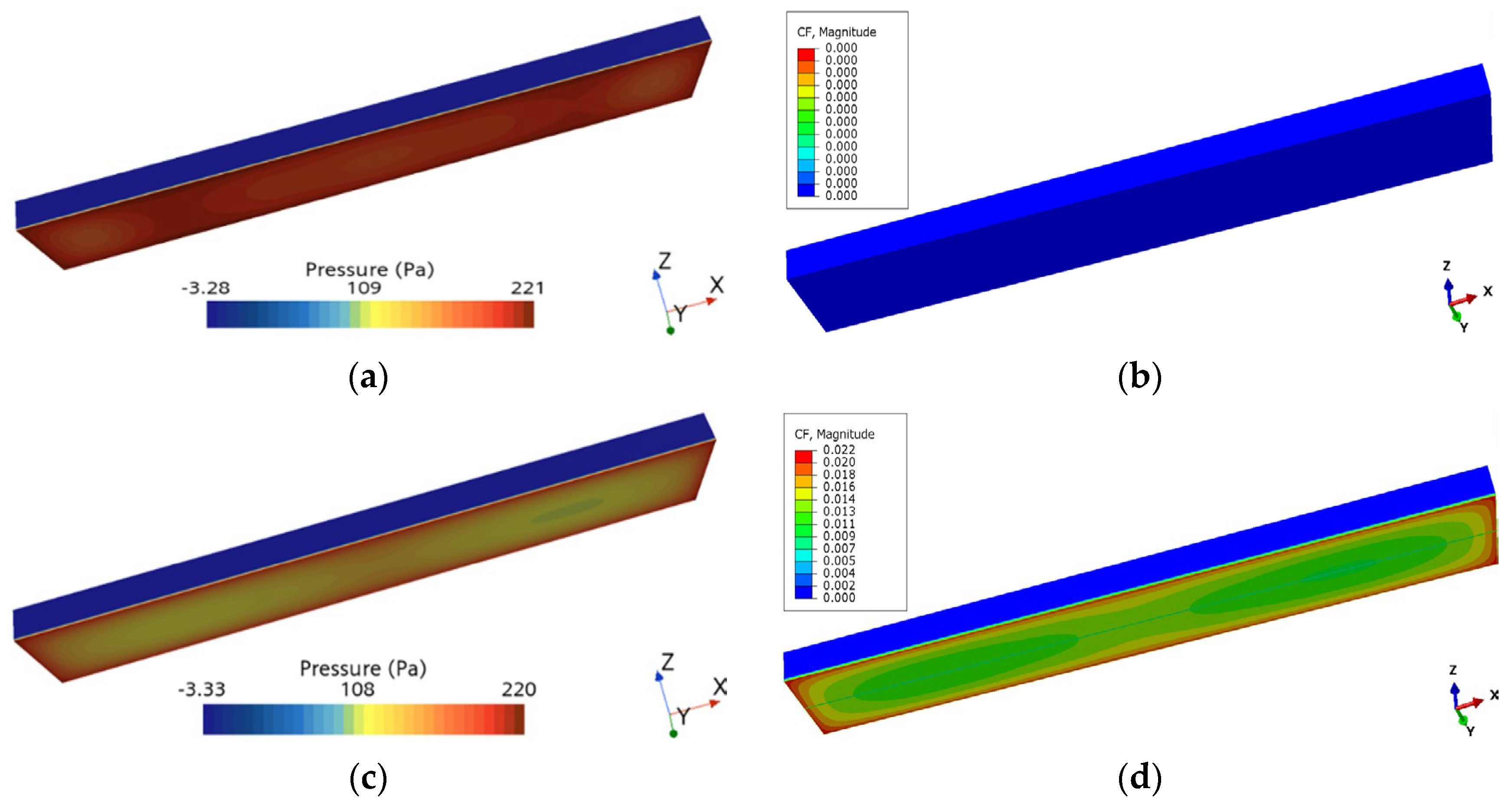
4.3.1. Hydrodynamic Analysis
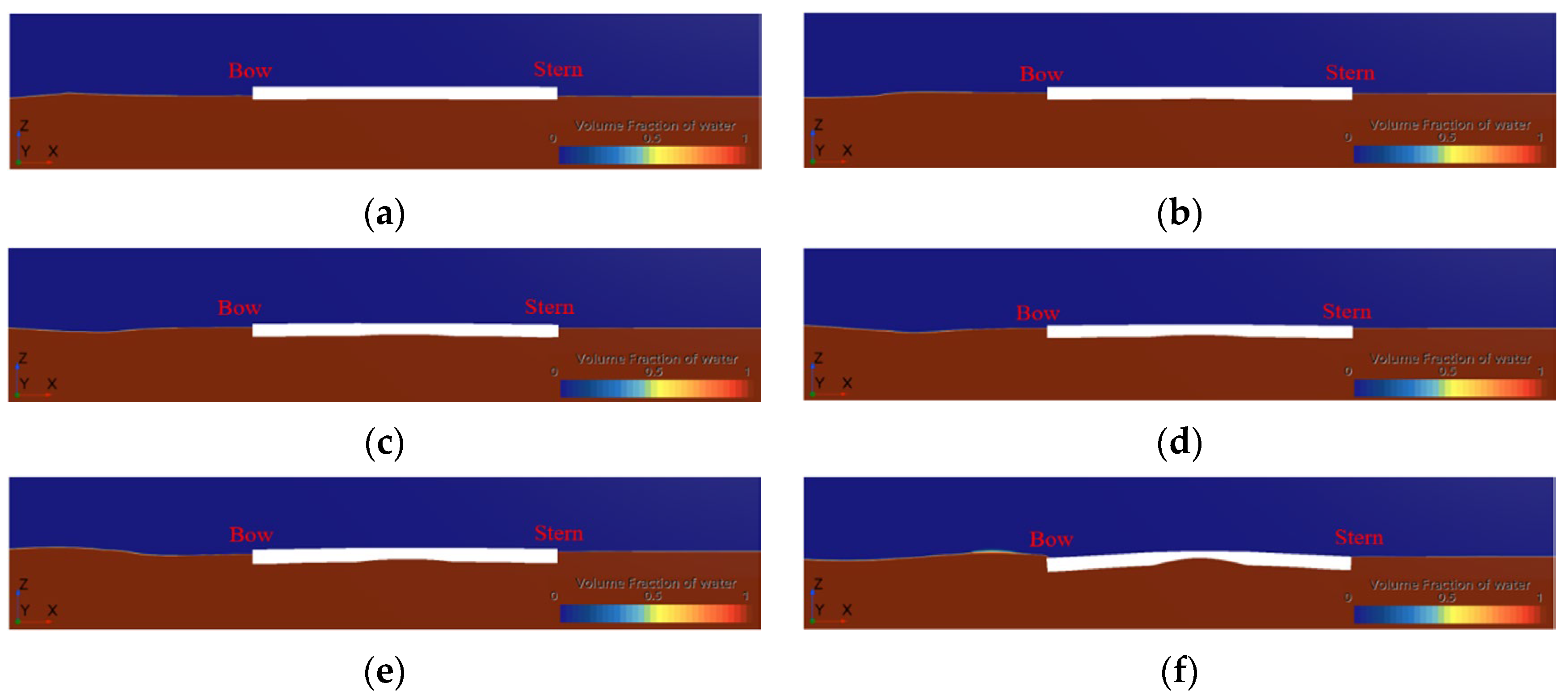
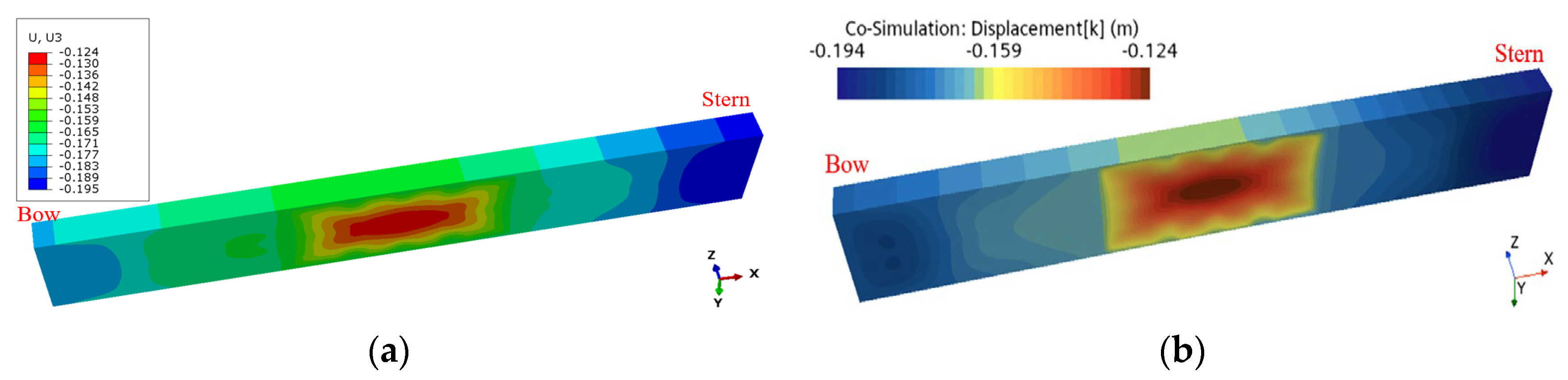
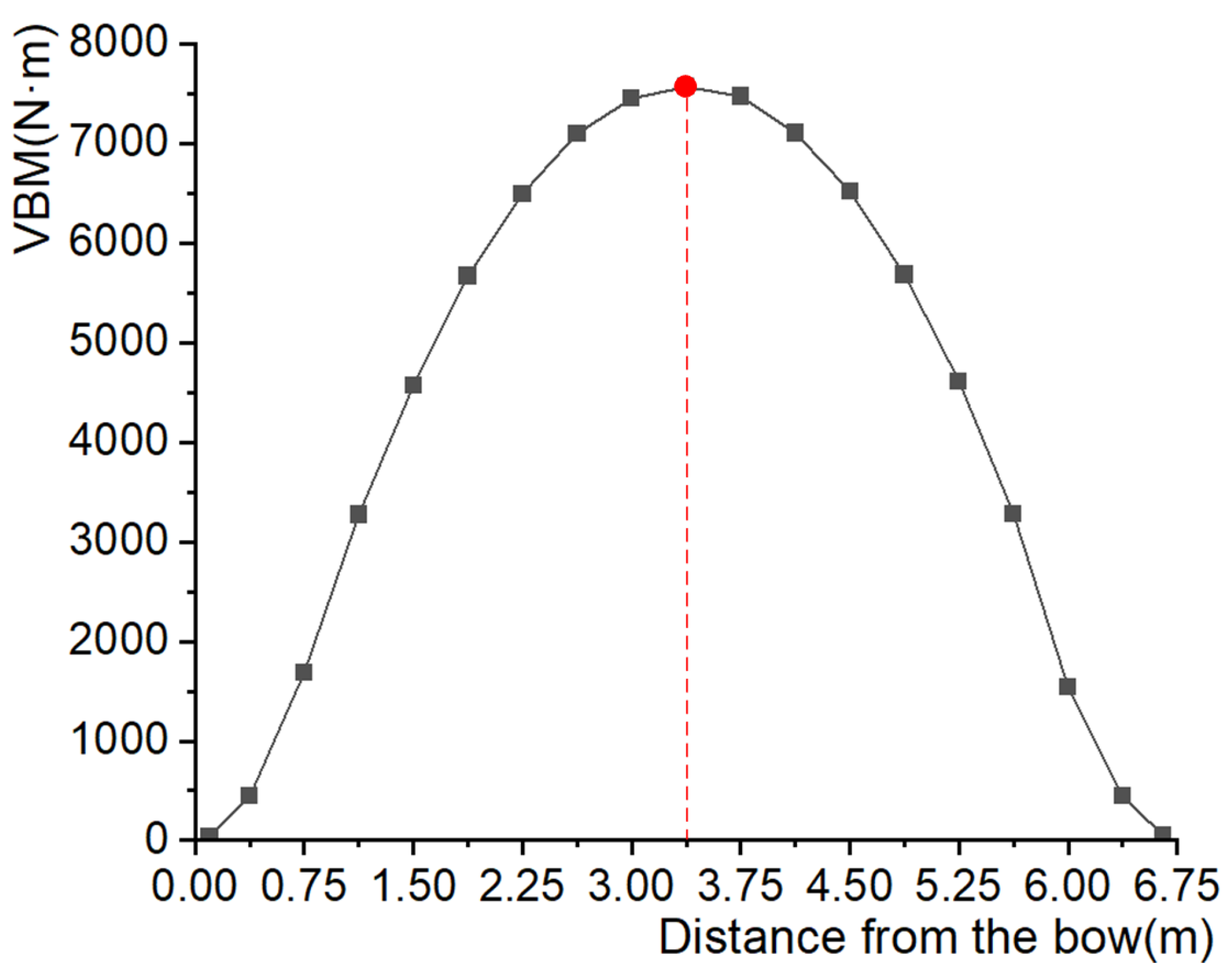
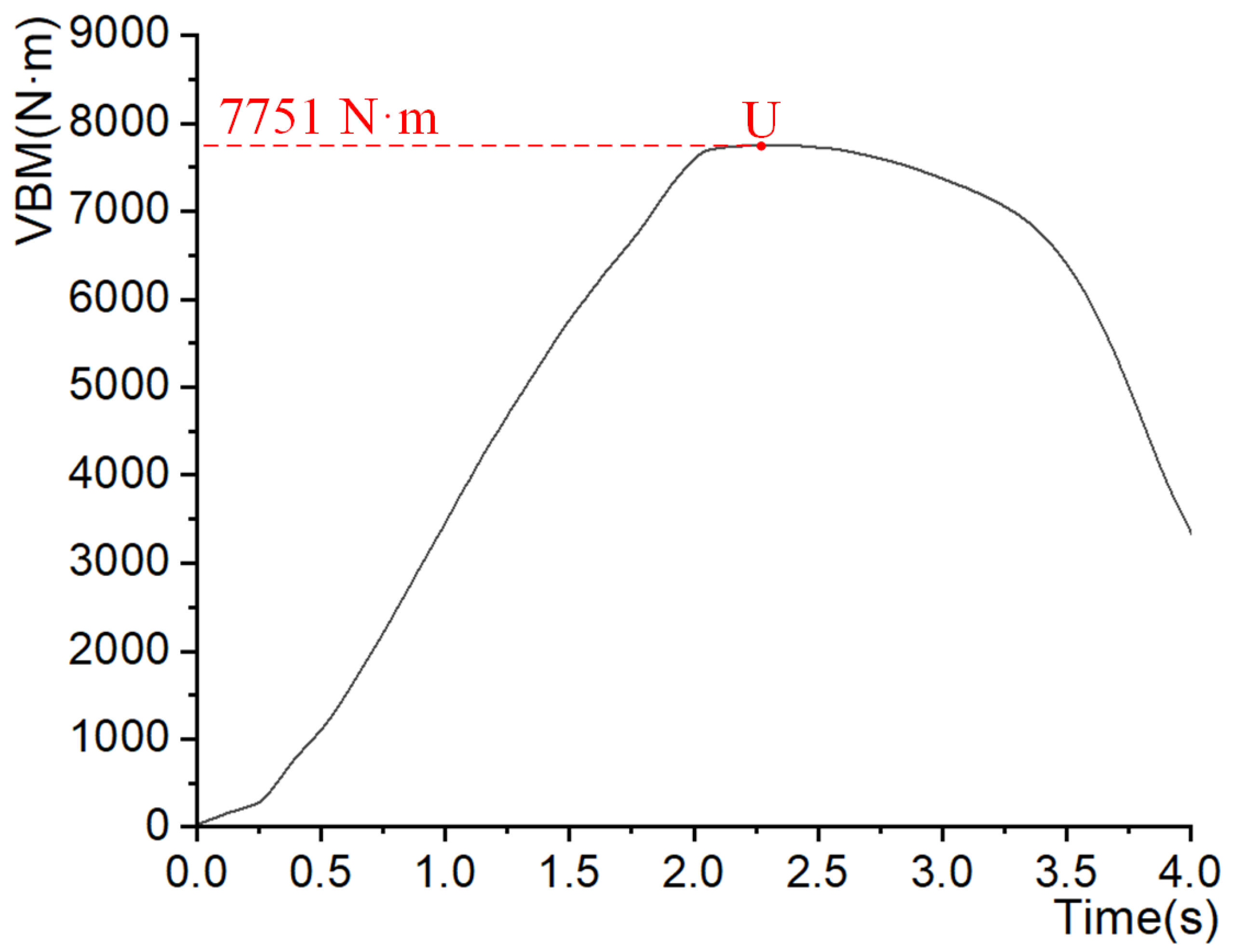
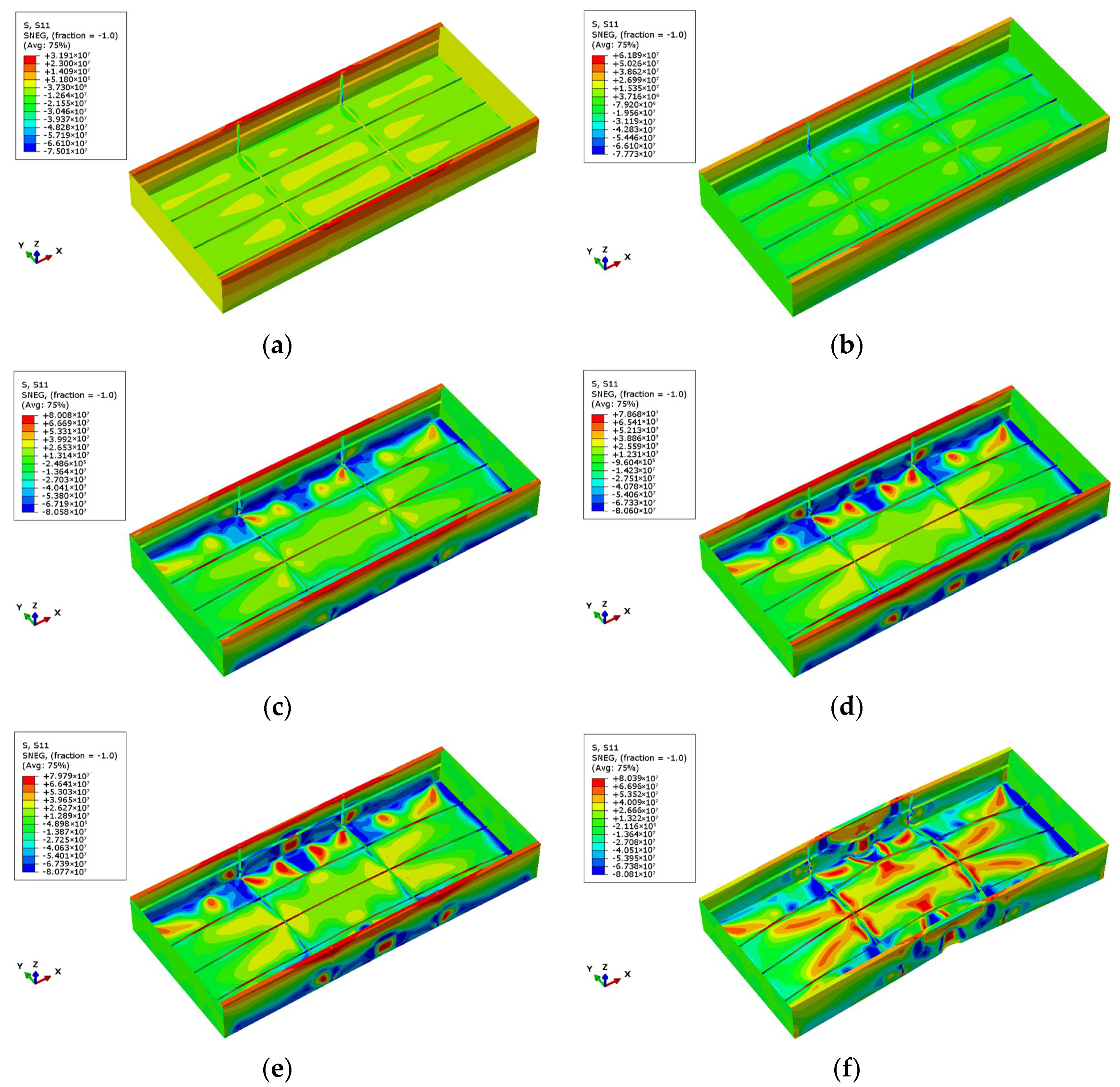
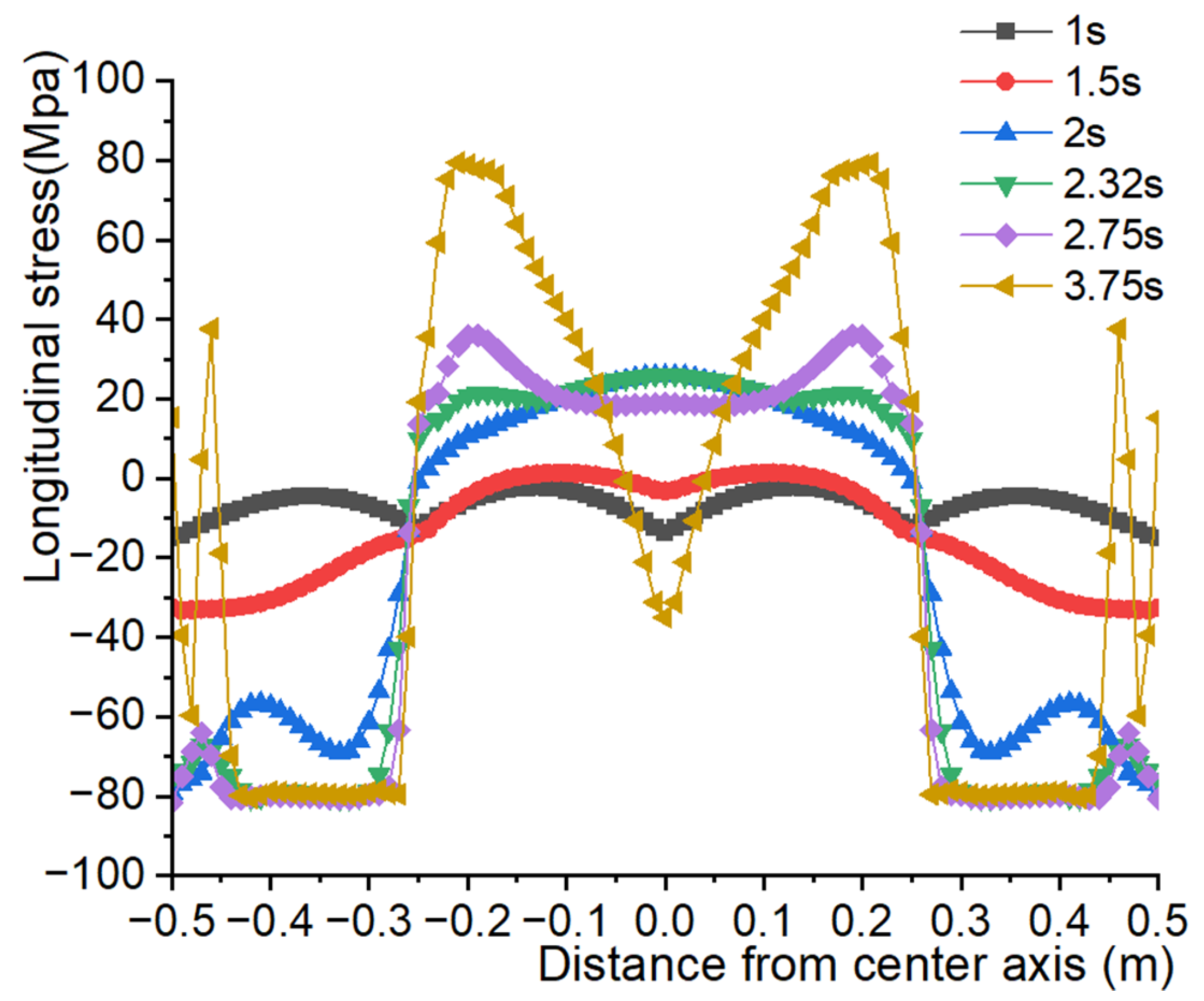
4.3.2. Progressive Collapse Behavior Analysis
5. Conclusions
- 1.
- The CFD-FEM co-simulation methodology enables a two-way coupled analysis of elasto-plastic structural deformation and hydrodynamic load through iterative exchange of the load and structural response data within a small time step, thereby providing a robust solution framework for elasto-plastic structural response analysis under wave actions.
- 2.
- The structural response not only passively reflects the effects of fluid loads but also actively modifies the flow field characteristics and boundary conditions, thereby reconfiguring the spatiotemporal distribution of hydrodynamic loads. When structural responses are significant, their influence on fluid loading becomes pronounced. Therefore, FSI effects must be incorporated into the analysis of ship hull structural responses under wave actions to ensure accurate load predictions and integrity assessments.
- 3.
- Ship structures exhibit a local structural response under the action of out-of-plane water pressure, and this affects the overall structural progressive collapse process. The method presented in this paper not only considers the FSI effect but also considers the local structural response, thus improving the ability to clarify the wave-induced collapse mechanism of marine structures.
- 4.
- In future research, model experiments will be conducted to validate the accuracy of the proposed methodology. Furthermore, full-scale actual ship structural collapse mechanisms under marine environmental loads will be systematically investigated based on this approach, aimed at providing critical technical support for hull structural safety design and lightweight optimization strategies.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cinquini, C.; Venini, P.; Nascimbene, R.; Tiano, A. Design of a river-sea ship by optimization. Struct. Multidiscip. Optim. 2001, 3, 240–247. [Google Scholar]
- Shi, G.; Wang, D. Ultimate strength model experiment regarding a container ship’s hull structures. Ships Offshore Struct. 2012, 7, 165–184. [Google Scholar]
- Wang, C.; Wu, J.; Wang, D. Experimental and numerical investigations on the ultimate longitudinal strength of an ultra large container ship. Ocean Eng. 2019, 192, 106546. [Google Scholar]
- Wang, Q.; Wang, C.; Wu, J.; Wang, D. Experimental and numerical investigations of the ultimate torsional strength of an ultra large container ship. Mar. Struct. 2020, 70, 102695. [Google Scholar]
- Wang, Q.; Wang, D. Warping and shear behaviors involved in hull girder’s torsional collapse process. Thin-Walled Struct. 2020, 157, 107123. [Google Scholar]
- Lee, D.H.; Paik, J.K. Ultimate strength characteristics of as-built ultra-large containership hull structures under combined vertical bending and torsion. Ships Offshore Struct. 2020, 15, S143–S160. [Google Scholar] [CrossRef]
- Pei, Z.; Yuan, Q.; Ao, L.; Wu, W. A research on similarity law for combined ultimate bending and torsional strength. Ships Offshore Struct. 2023, 19, 1254–1265. [Google Scholar]
- Lehmann, E. Discussion on “Report of committee III. 1: Ultimate strength”. In Proceedings of the 16th ISSC (3), Southampton, UK, 20–25 August 2006; pp. 121–131. [Google Scholar]
- Xiao, T.; Fan, J.; Mei, G.; Hou, G.; Chen, L.; Zhang, C.; Hu, M. Strength analysis of overall ship FEM model based on design wave approach. Ship Sci. Technol. 2010, 32, 14–19. (In Chinese) [Google Scholar]
- Pei, Z.; Iijima, K.; Fujikubo, M.; Tanaka, S.; Okazawa, S.; Yao, T. Simulation on progressive collapse behaviour of whole ship model under extreme waves using idealized structural unit method. Mar. Struct. 2015, 40, 104–133. [Google Scholar]
- Bishop, R.E.D.; Price, W.G.; Tam, P.K.Y. Unified dynamic analysis of ship response to waves. Nav. Archit. 1977, 6, 363–390. [Google Scholar]
- Bishop, R.E.D.; Price, W.G.; Temarel, P. A unified dynamic analysis of antisymmetric ship response to waves. RINA Trans. 1979, 112, 349–365. [Google Scholar]
- Wu, Y.; Price, W.G. A general form of interface boundry condition of fluid-structure interaction and its application. Sel. Pap. Chin. Soc. Nav. Archit. Mar. Eng. 1985, 1, 66–87. [Google Scholar]
- Iijima, K.; Yao, T.; Moan, T. Structural response of a ship in severe seas considering global hydroelastic vibrations. Mar. Struct. 2008, 21, 420–445. [Google Scholar] [CrossRef]
- Ni, X.; Cheng, X.; Lu, Y.; Wu, B.; Wang, Q.; Zhang, K.; Yu, J. Evaluation of hydroelastic responses of a 180k DWT large bulk carrier. Ocean Eng. 2020, 199, 106948. [Google Scholar] [CrossRef]
- Lakshmynarayanana, P.A.; Temarel, P. Application of a two-way partitioned method for predicting the wave-induced loads of a flexible containership. Appl. Ocean Res. 2020, 96, 102052. [Google Scholar] [CrossRef]
- Jiao, J.; Huang, S.; Soares, C.G. Viscous fluid–flexible structure interaction analysis on ship springing and whipping responses in regular waves. J. Fluids Struct. 2021, 106, 103354. [Google Scholar] [CrossRef]
- Iijima, K.; Kimura, K.; Xu, W.; Fujikubo, M. Hydroelasto-plasticity approach to predicting the post-ultimate strength behaviour of ship’s hull girder in waves. J. Mar. Sci. Technol. 2011, 16, 379–389. [Google Scholar] [CrossRef]
- Iijima, K.; Fujikubom, M. Hydro-elastoplastic behaviour of VLFS under extreme vertical bending moment by segmented beam approach. Mar. Struct. 2018, 57, 1–17. [Google Scholar] [CrossRef]
- Liu, W.; Song, X.; Pei, Z.; Li, Y. Experiment study of hydroelasto-buckling ship model in a single wave. Ocean Eng. 2017, 142, 102–114. [Google Scholar] [CrossRef]
- Liu, W.; Luo, W.; Yang, M.; Xia, T.; Huang, Y.; Wang, S.; Leng, J.; Li, Y. Development of a fully coupled numerical hydroelasto-plastic approach for offshore structure. Ocean Eng. 2022, 258, 111713. [Google Scholar] [CrossRef]
- STAR-CCM+, Version 8.0; Software for Computational Fluid Dynamics; Manual; Siemens: Munich, Germany, 2012.
- ITTC. Recommended Procedures and Guidelines: Practical Guidelines for Ship CFD Applications; ITTC: Zürich, Switzerland, 2011. [Google Scholar]
- Lakshmynarayanana, P.A.; Temarel, P. Application of CFD and FEA coupling to predict dynamic behaviour of a flexible barge in regular head waves. Mar. Struct. 2019, 65, 308–325. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Density | 2700 | Kg/m3 |
| Yield strength | 70 | MPa |
| Elasticity modulus | 69,000 | MPa |
| Poisson ratio | 0.33 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, Q.; Pei, Z.; Zhu, Y. Research on the Hydroelasto-Plasticity Method and Its Application in Collapse Analyses of Ship Structures. J. Mar. Sci. Eng. 2025, 13, 706. https://doi.org/10.3390/jmse13040706
Yuan Q, Pei Z, Zhu Y. Research on the Hydroelasto-Plasticity Method and Its Application in Collapse Analyses of Ship Structures. Journal of Marine Science and Engineering. 2025; 13(4):706. https://doi.org/10.3390/jmse13040706
Chicago/Turabian StyleYuan, Qingning, Zhiyong Pei, and Ye Zhu. 2025. "Research on the Hydroelasto-Plasticity Method and Its Application in Collapse Analyses of Ship Structures" Journal of Marine Science and Engineering 13, no. 4: 706. https://doi.org/10.3390/jmse13040706
APA StyleYuan, Q., Pei, Z., & Zhu, Y. (2025). Research on the Hydroelasto-Plasticity Method and Its Application in Collapse Analyses of Ship Structures. Journal of Marine Science and Engineering, 13(4), 706. https://doi.org/10.3390/jmse13040706