
Estimation of the Motion Response of a Large Ocean Buoy in the South China Sea

 , ,
, ,  ,
,
Abstract
1. Introduction
2. Theory Model and Simulation Set-Up
2.1. Numerical Method
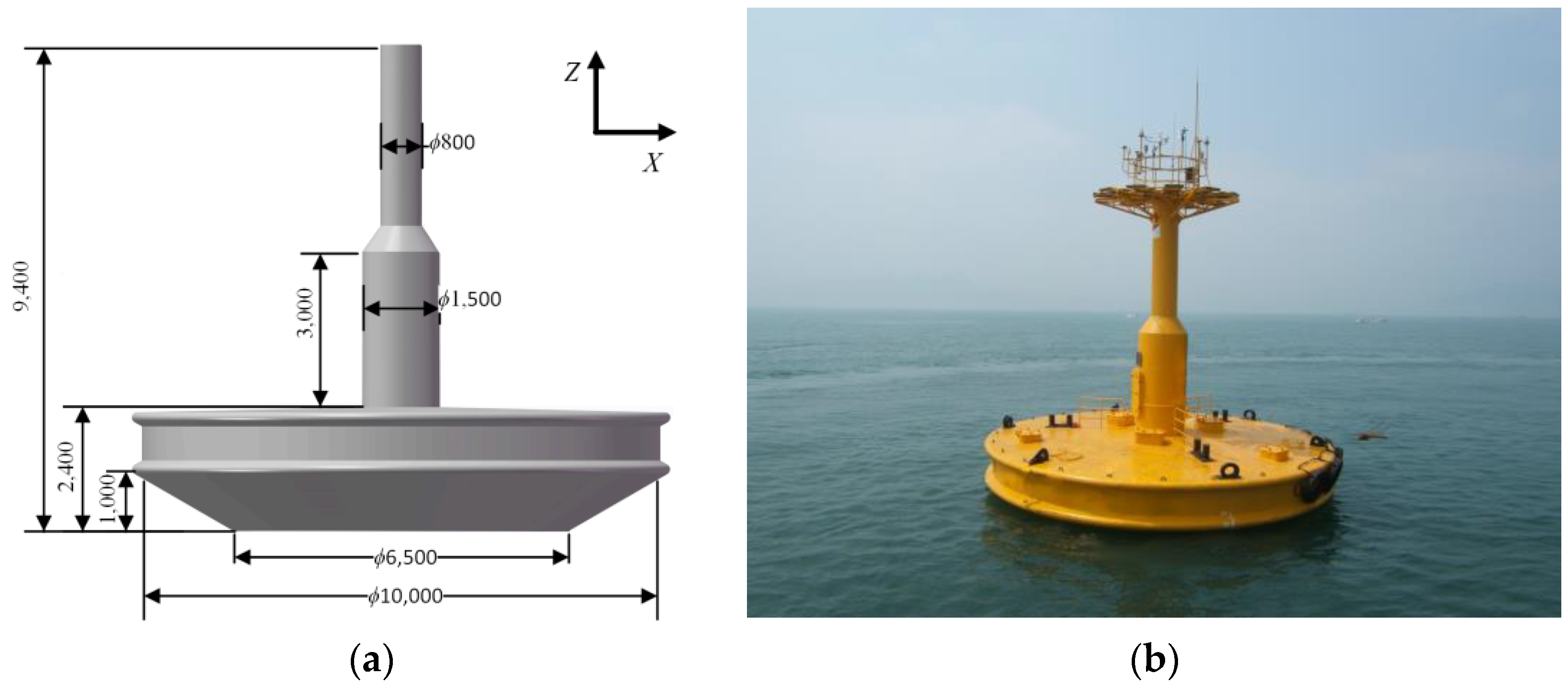
2.2. The Geometric Parameters of the Buoy
2.3. Test Cases in Marine Environment
3. Model Verification
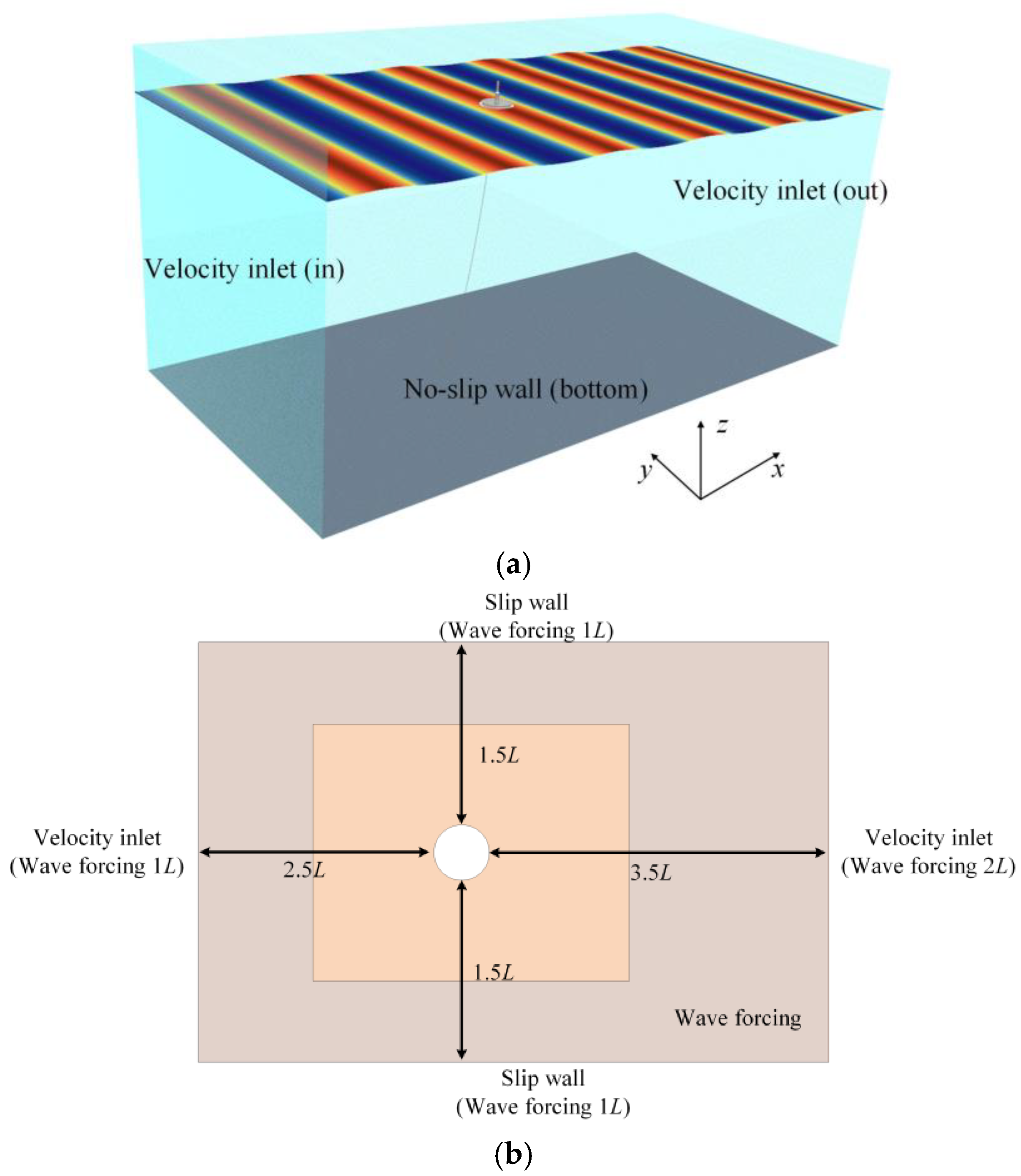
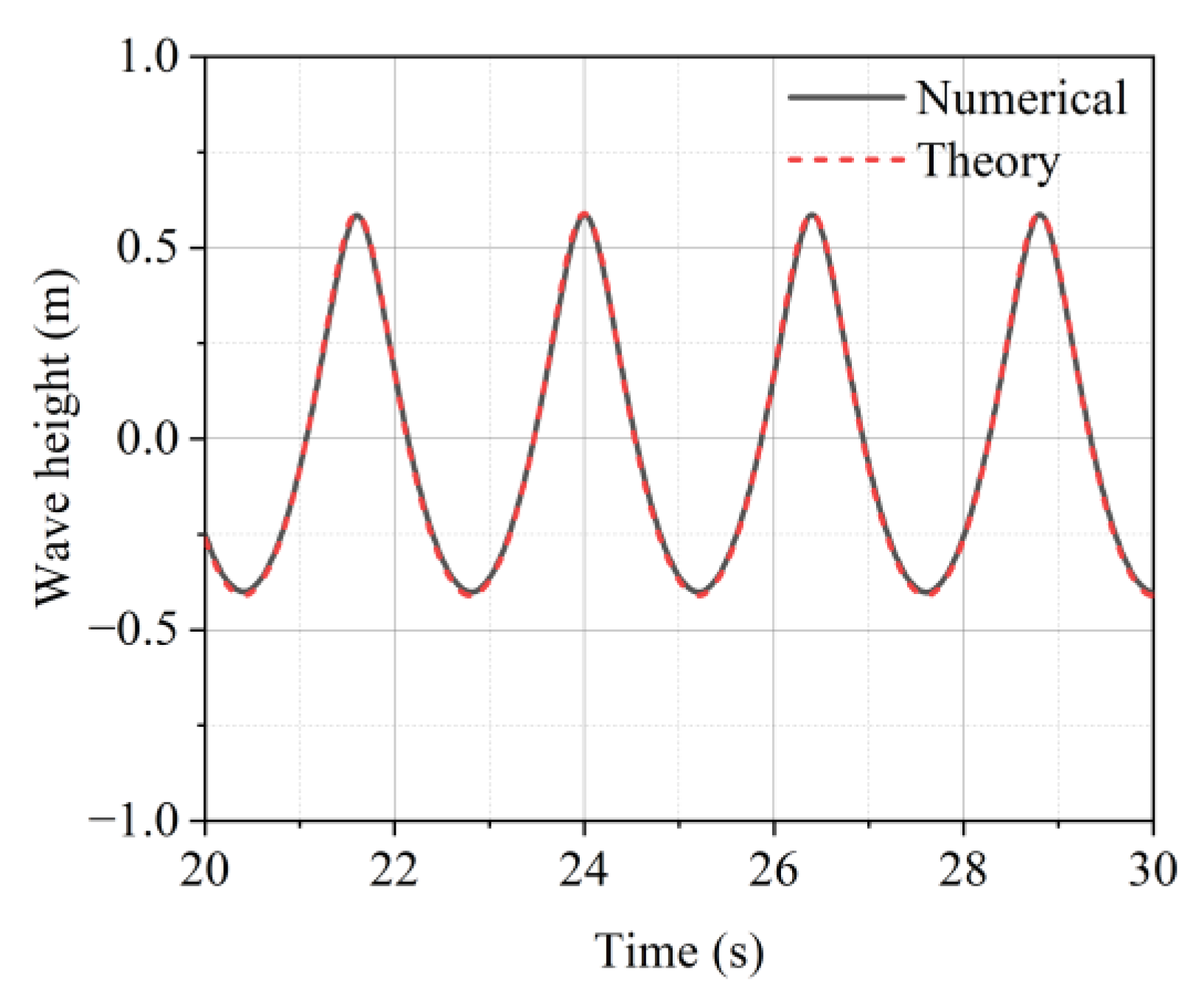
3.1. Numerical Wave Tank
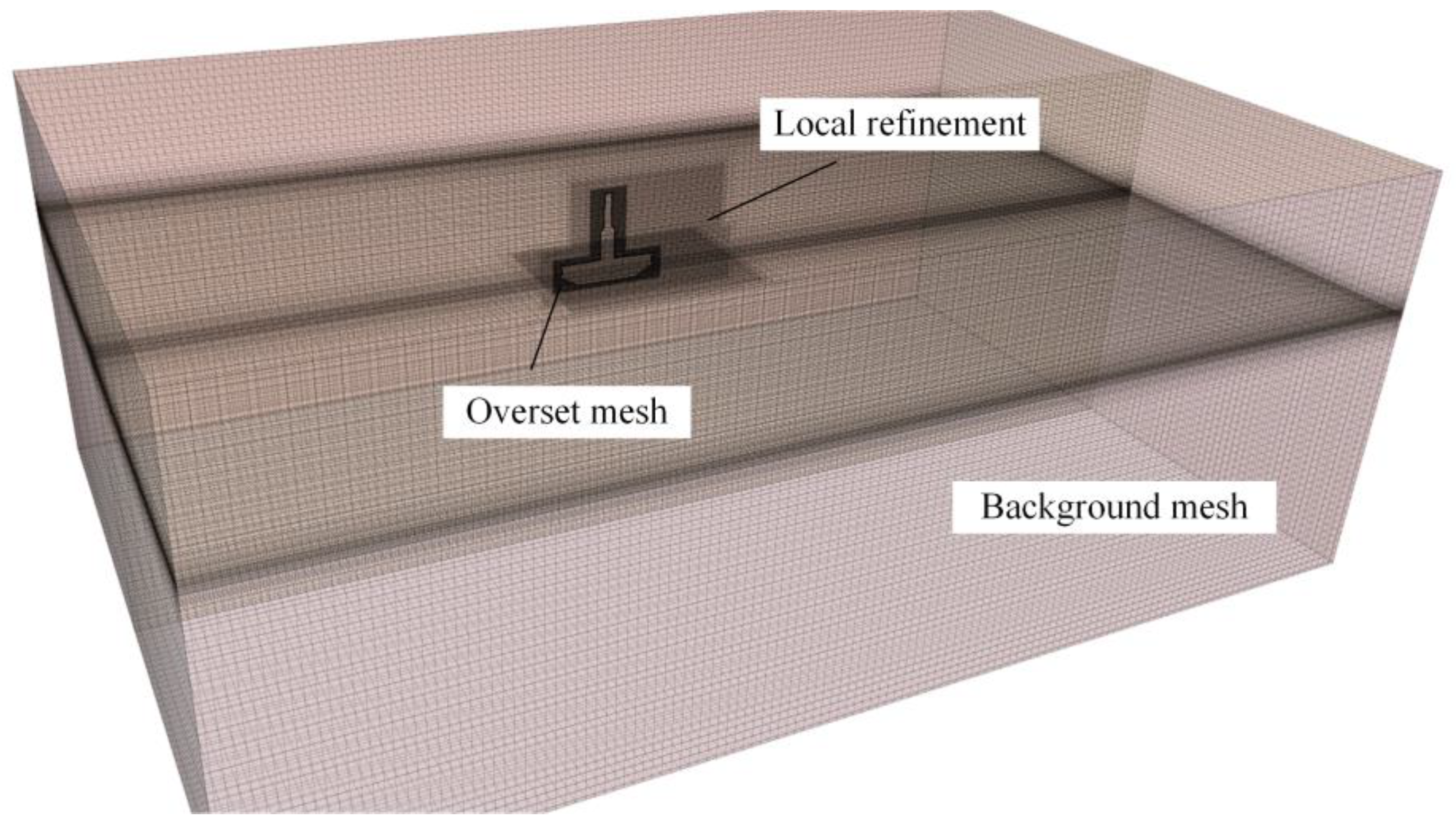
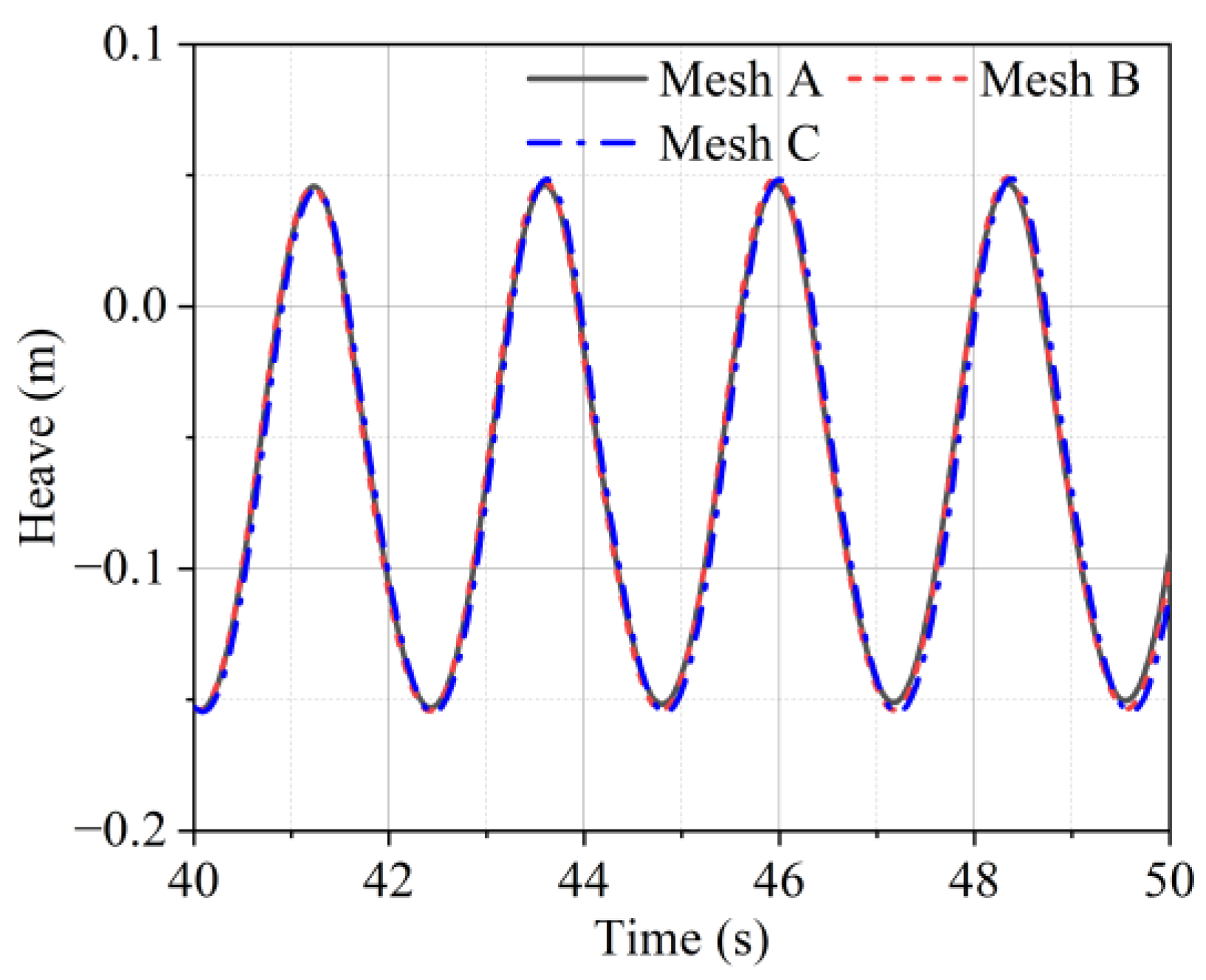
3.2. Mesh Convergence
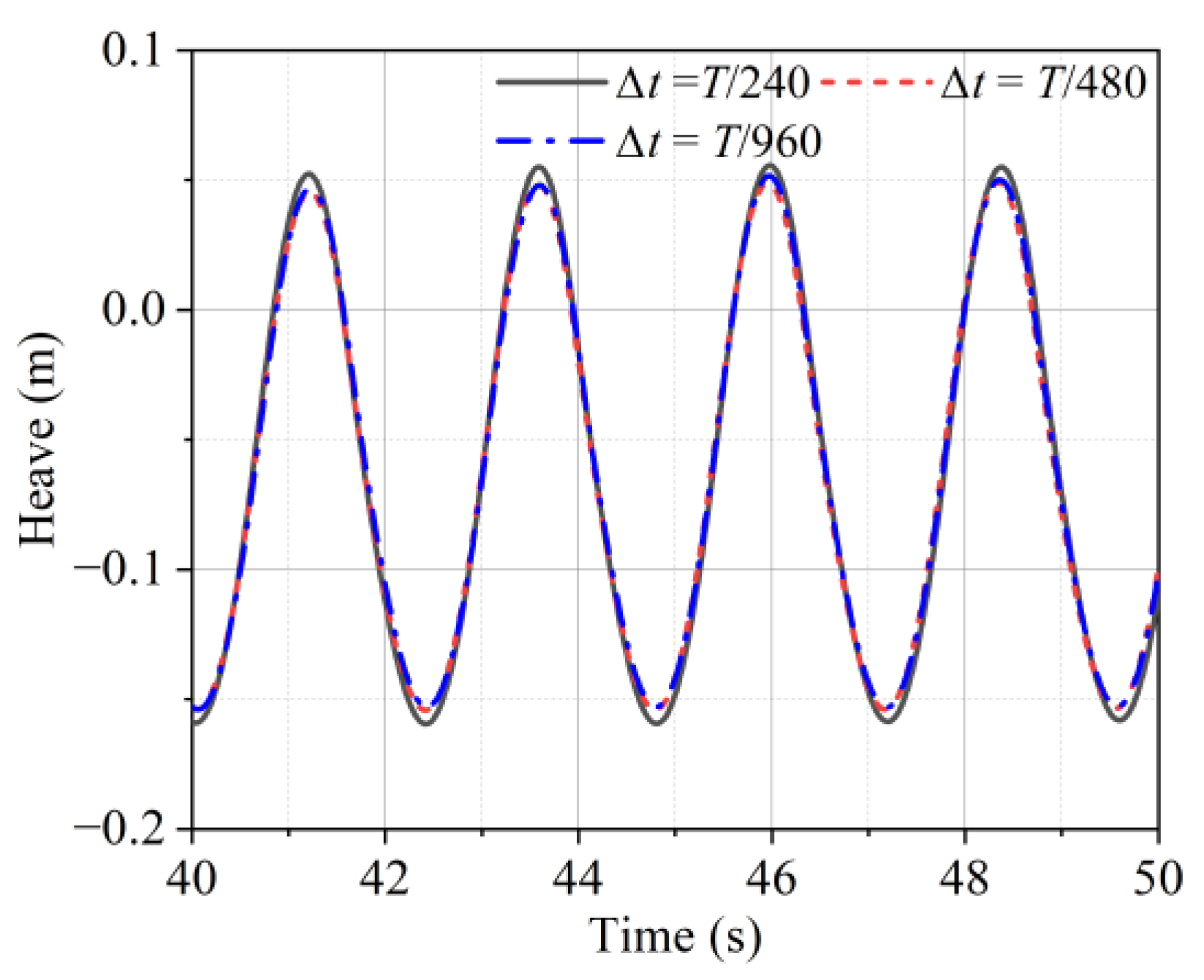
3.3. Time-Step Convergence
4. Results and Discussion
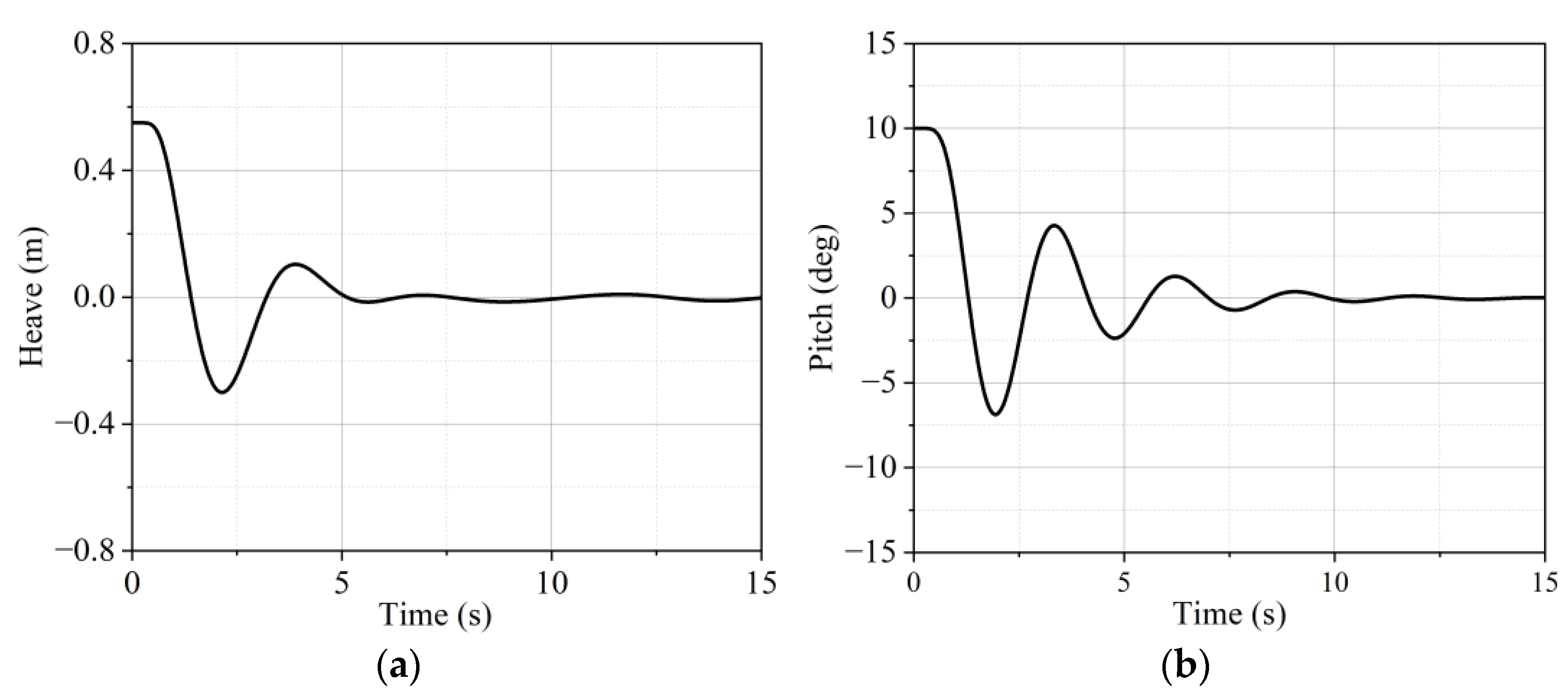
4.1. Free Decay Test
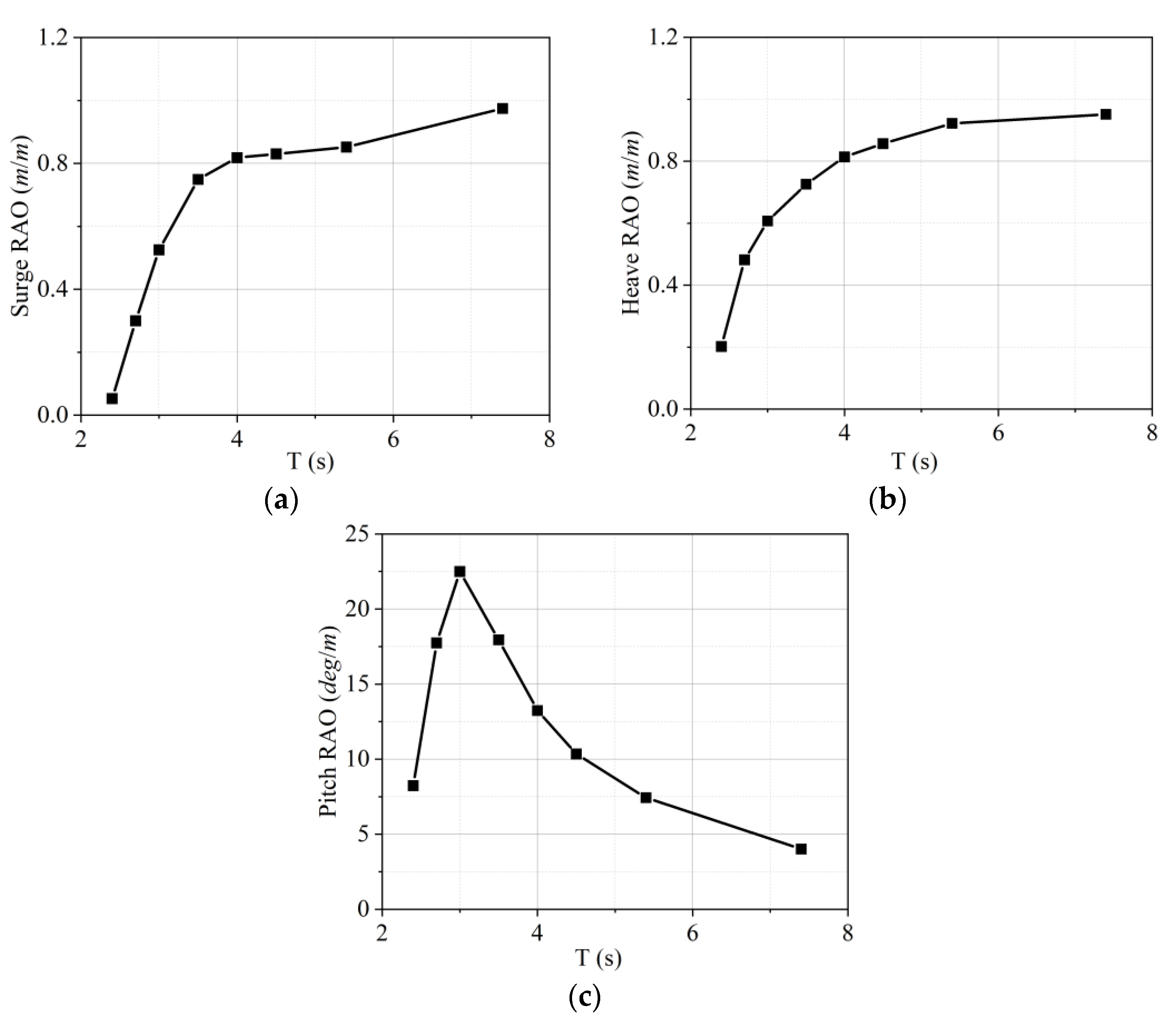
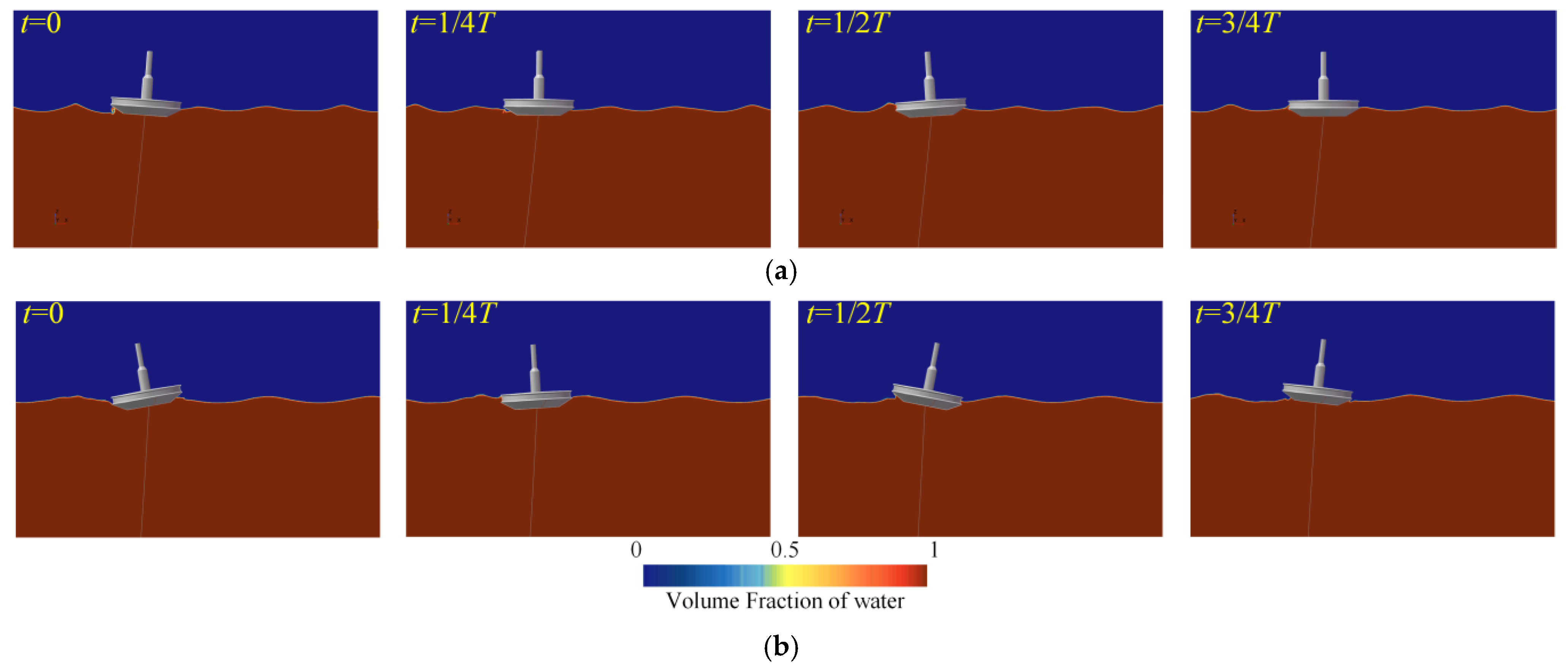
4.2. Effect of Wave Period
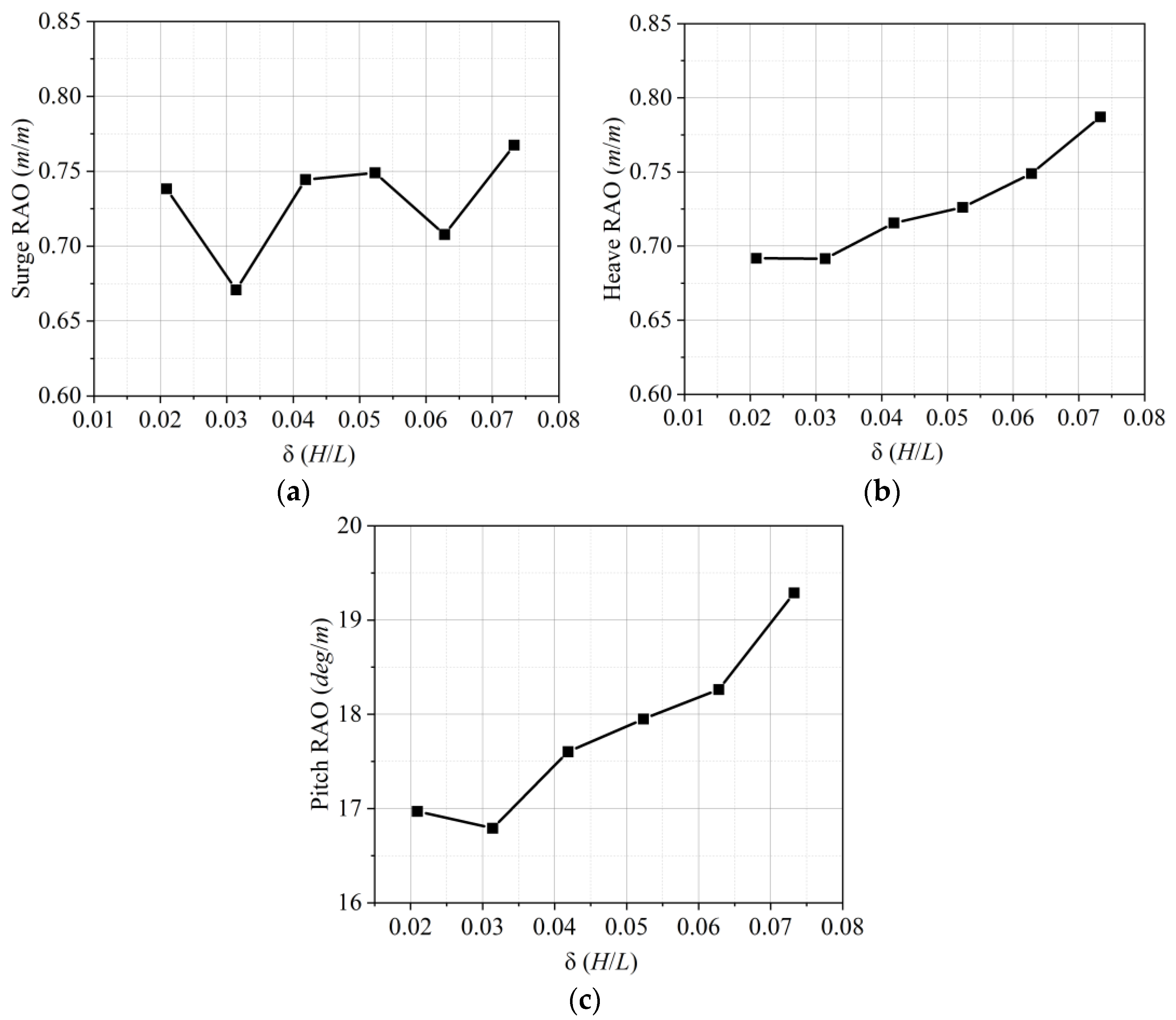
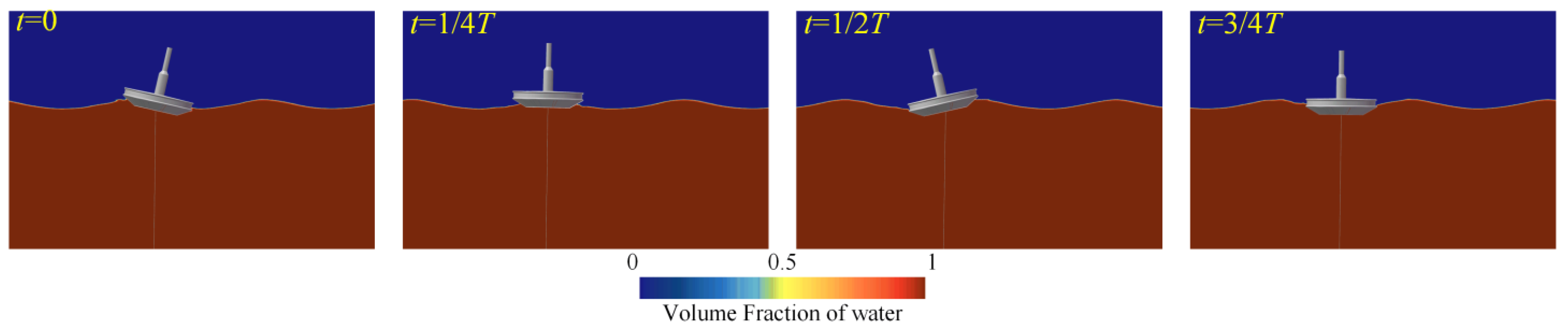
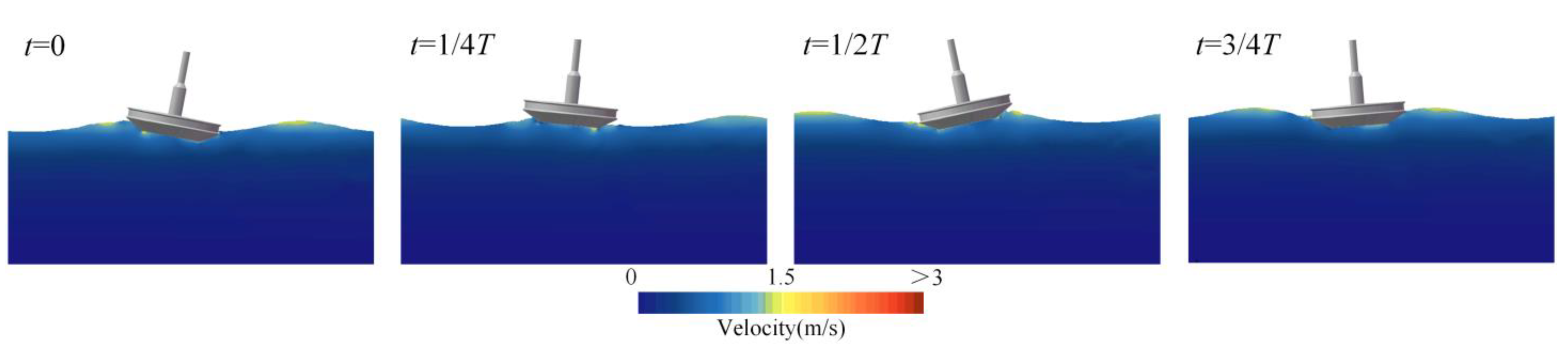
4.3. Effect of Wave Steepness
4.4. Validation with Full-Scale Field Data
5. Conclusions
- 1.
- In the free decay tests, the unique bottom shape of the buoy acted as a damping plate, generating substantial radiation damping, which led to a rapid decay in heave motion. The natural periods for heave and pitch were measured to be 3.46 s and 2.84 s, respectively.
- 2.
- The response characteristics of the buoy’s motion under different sea conditions were analyzed via the response amplitude operator and frequency spectral patterns. The heave response approached the amplitude of the waves as the wave period increased. The maximum RAO for pitch motion was close to the buoy’s natural frequency. As the wave steepness increased, the nonlinearity of the waves intensified, resulting in an increased motion response of the buoy. This made the nonlinear interactions between the waves and the structure more pronounced.
- 3.
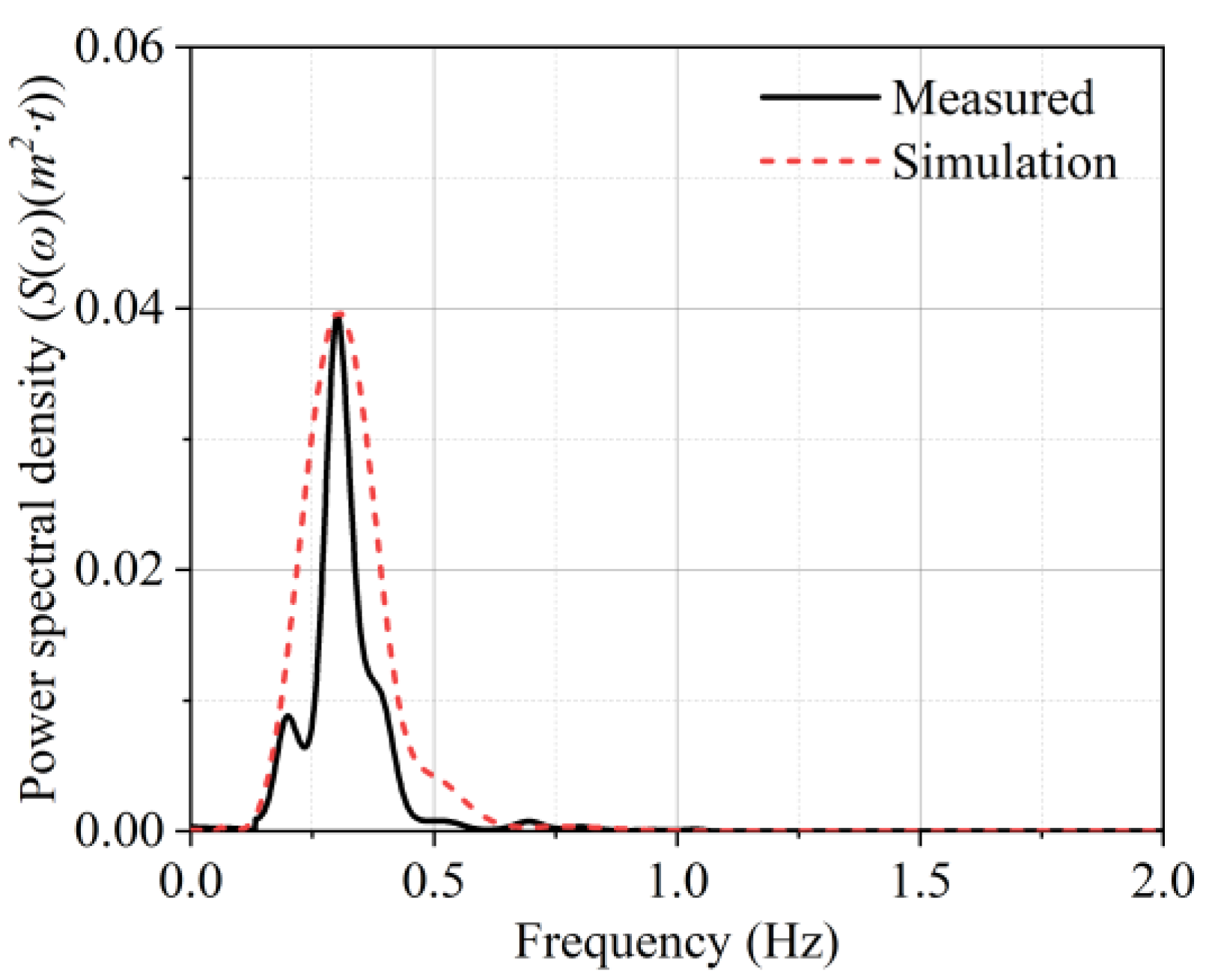
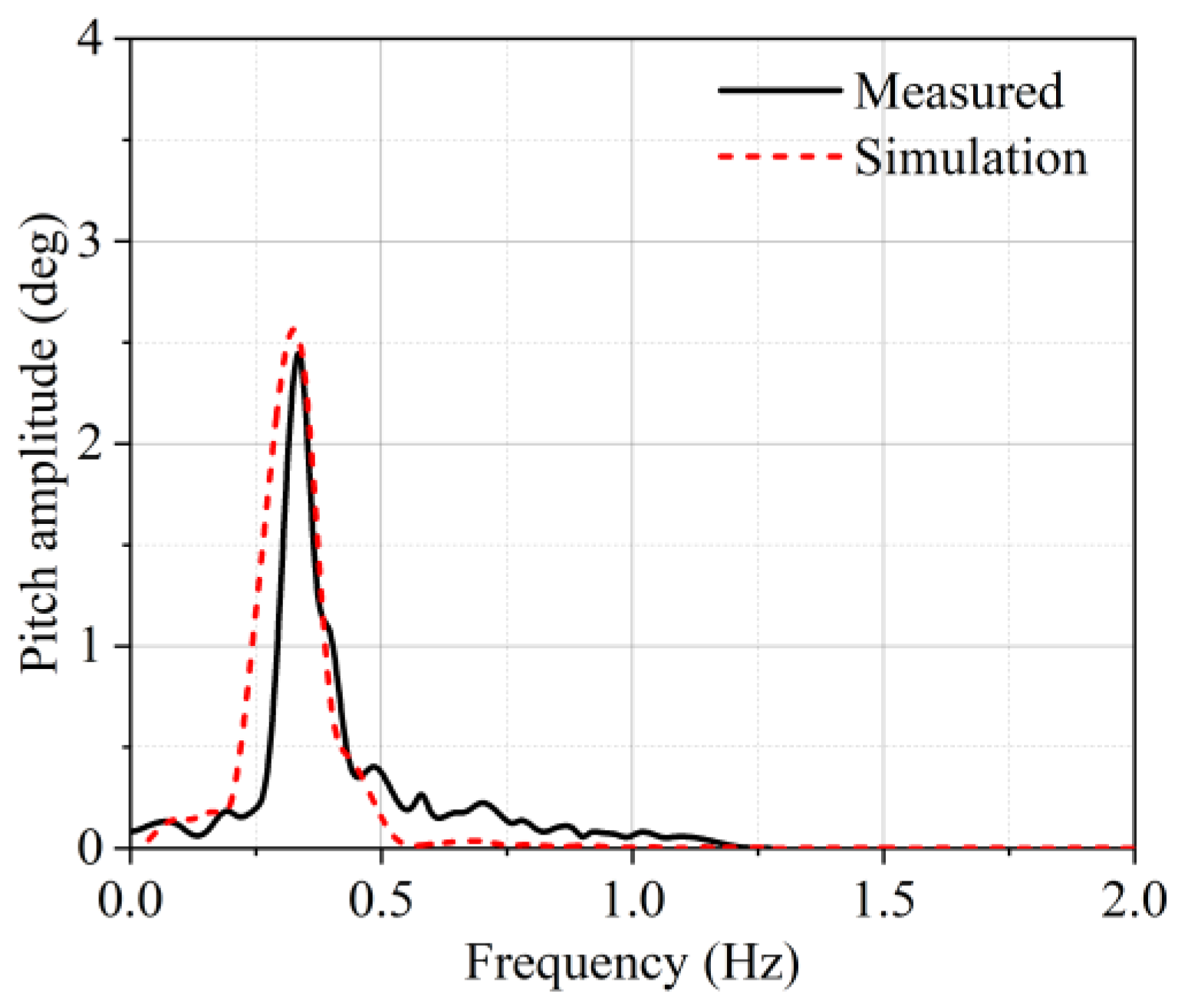
- The numerical simulations of the dynamic responses under irregular waves were conducted via full-scale field time series data and compared with field data. A comparison between the wave surface and the buoy pitch motion revealed a fairly good agreement.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CFD | Computational fluid dynamics |
| DFBI | Dynamic fluid body interaction |
| FFT | Fast fourier transform |
| NWT | Numerical wave tank |
| RAO | Response amplitude operator |
| SIMPLE | Semi-Implicit Method for Pressure-Linked Equations |
| VOF | Volume of fluid |
References
- Wang, L.; Li, H.; Jiang, J. A High-Efficiency Wave-Powered Marine Observation Buoy: Design, Analysis, and Experimental Tests. Energy Convers. Manag. 2022, 270, 116154. [Google Scholar] [CrossRef]
- Wang, J.; Wang, Z.; Wang, Y.; Liu, S.; Li, Y. Current Situation and Trend of Marine Data Buoy and Monitoring Network Technology of China. Acta Oceanol. Sin. 2016, 35, 1–10. [Google Scholar] [CrossRef]
- Lin, M.; Yang, C. Ocean Observation Technologies: A Review. Chin. J. Mech. Eng. 2020, 33, 32. [Google Scholar] [CrossRef]
- Draycott, S.; Pillai, A.C.; Gabl, R.; Stansby, P.K.; Davey, T. An Experimental Assessment of the Effect of Current on Wave Buoy Measurements. Coast. Eng. 2022, 174, 104114. [Google Scholar] [CrossRef]
- Li, Y.; Yang, F.; Li, S.; Tang, X.; Sun, X.; Qi, S.; Gao, Z. Influence of Six-Degree-of-Freedom Motion of a Large Marine Data Buoy on Wind Speed Monitoring Accuracy. J. Mar. Sci. Eng. 2023, 11, 1985. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Wang, F.; Ye, J. Experimental Study on Motion Characterisation of CALM Buoy Hose System under Water Waves. J. Mar. Sci. Eng. 2022, 10, 204. [Google Scholar] [CrossRef]
- Radhakrishnan, S.; Datla, R.; Hires, R.I. Theoretical and Experimental Analysis of Tethered Buoy Instability in Gravity Waves. Ocean Eng. 2007, 34, 261–274. [Google Scholar] [CrossRef]
- Liu, W.; Wang, B.-F.; Zhang, J.; Dong, Y. A Numerical Analysis of Wave Type and Steepness Effects on Cylindrical Buoy Dynamic Characteristics. Ocean Eng. 2024, 311, 118923. [Google Scholar] [CrossRef]
- Li, H.; Xu, C.; Tian, Y.; Qu, F.; Chen, J.; Sun, K.; Leng, J.; Wei, Y. The Design of a Novel Small Waterplane Area Pillar Buoy Based on Rolling Analysis. Ocean Eng. 2019, 184, 289–298. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, L.; Liu, S. Analysis and Optimization on the Flow Ability of Wave Buoy Based on AQWA. IOP Conf. Ser. Earth Environ. Sci. 2018, 171, 012004. [Google Scholar] [CrossRef]
- Zheng, H.; Chen, Y.; Liu, Q.; Zhang, Z.; Li, Y.; Li, M. Theoretical and Numerical Analysis of Ocean Buoy Stability Using Simplified Stability Parameters. J. Mar. Sci. Eng. 2024, 12, 966. [Google Scholar] [CrossRef]
- Jeong, S.-M.; Son, B.-H.; Lee, C.-Y. Estimation of the Motion Performance of a Light Buoy Adopting Ecofriendly and Lightweight Materials in Waves. J. Mar. Sci. Eng. 2020, 8, 139. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Wang, F.; Ye, J. Numerical Studies on CALM Buoy Motion Responses and the Effect of Buoy Geometry Cum Skirt Dimensions with Its Hydrodynamic Waves-Current Interactions. Ocean Eng. 2022, 244, 110378. [Google Scholar] [CrossRef]
- Li, X.; Bian, Y. Modeling and Prediction for the Buoy Motion Characteristics. Ocean Eng. 2021, 239, 109880. [Google Scholar] [CrossRef]
- Deng, H.; Li, X.; Zhu, J.; Liu, Y. Transfer Learning for Modeling and Prediction of Marine Buoy Motion Characteristics. Ocean Eng. 2022, 266, 113158. [Google Scholar] [CrossRef]
- Jin, Y.; Xie, K.; Liu, G.; Peng, Y.; Wan, B. Nonlinear Dynamics Modeling and Analysis of a Marine Buoy Single-Point Mooring System. Ocean Eng. 2022, 262, 112031. [Google Scholar] [CrossRef]
- Ma, C.; Iijima, K.; Nihei, Y.; Fujikubo, M. Theoretical, Experimental and Numerical Investigations into Nonlinear Motion of a Tethered-Buoy System. J. Mar. Sci. Technol. 2016, 21, 396–415. [Google Scholar] [CrossRef]
- Li, X.; Chen, Y.; Mao, L.; Xia, H. Numerical Investigation of Hydrodynamic Performance of a Light Buoy With Different Mooring Configurations in Regular Waves. J. Offshore Mech. Arct. Eng. 2022, 144, 021904. [Google Scholar] [CrossRef]
- Zhu, X.; Yoo, W.S. Dynamic Analysis of a Floating Spherical Buoy Fastened by Mooring Cables. Ocean Eng. 2016, 121, 462–471. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, J.; Liu, S.; Tao, B.; Wu, Y.; Wan, X.; Xu, Y.; Song, M.; Yan, X.; Yang, X.; et al. Structure Design and Implementation of a High Stability Semi-Submersible Optical Buoy for Marine Environment Observation. Ocean Eng. 2023, 290, 116217. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Wang, F.; Ye, J. Understanding the Fluid–Structure Interaction from Wave Diffraction Forces on CALM Buoys: Numerical and Analytical Solutions. Ships Offshore Struct. 2022, 17, 2545–2573. [Google Scholar] [CrossRef]
- Luan, Z.; Chen, B.; He, G.; Cui, T.; Ghassemi, H.; Zhang, Z.; Liu, C. Research on Wavestar-Like Wave Energy Converter Arrays with a Truss-Type Octagonal Floating Platform in the South China Sea. Energy 2024, 313, 134070. [Google Scholar] [CrossRef]
- Fenton, J.D. A Fifth-Order Stokes Theory for Steady Waves. J. Waterw. Port Coast. Ocean Eng. 1985, 111, 216–234. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | Parameter | Value |
|---|---|---|
| Buoy | Mass (kg) | 50,600 |
| Center of gravity (m) | (0, 0, 0.108) | |
| Draft (m) | 0.950 | |
| Moment of inertia, Ixx (kg∙m2) | 361,000 | |
| Moment of inertia, Iyy (kg∙m2) | 361,000 | |
| Moment of inertia, Izz (kg∙m2) | 460,000 | |
| Mooring line | Diameter (m) | 0.046 |
| Mass/unit length (kg/m) | 48.400 | |
| Location of the fairlead (m) | (0, 0, −1.150) | |
| The stiffness (kN/m) | 3.000 × 107 | |
| The length (m) | 101.700 |
| Test Cases | Wave Height H (m) | Wave Period T (s) | Wave Length L (m) |
|---|---|---|---|
| LC1 | 1.00 | 2.40 | 8.98 |
| LC2 | 1.00 | 2.70 | 11.37 |
| LC3 | 1.00 | 3.00 | 14.04 |
| LC4 | 1.00 | 3.50 | 19.11 |
| LC5 | 1.00 | 4.00 | 24.96 |
| LC6 | 1.00 | 4.50 | 31.58 |
| LC7 | 1.00 | 5.40 | 45.48 |
| LC8 | 1.00 | 7.40 | 85.41 |
| Wave Parameter | LC9 | LC10 | LC11 | LC12 | LC13 |
|---|---|---|---|---|---|
| H/L (−) | 0.07 | 0.06 | 0.04 | 0.03 | 0.02 |
| H (m) | 1.40 | 1.20 | 0.80 | 0.60 | 0.40 |
| T (s) | 3.50 | 3.50 | 3.50 | 3.50 | 3.50 |
| L (m) | 19.11 | 19.11 | 19.11 | 19.11 | 19.11 |
| Type | Dynamic Viscosity (Pa–s) | Density (kg/m3) |
|---|---|---|
| Water | 1.003 × 10−2 | 1.025 × 103 |
| Air | 1.855 × 10−5 | 1.205 |
| Mesh | Base Size (m) | L/∆x | H/∆z | Total Number |
|---|---|---|---|---|
| A | 0.160 | 63 | 12 | 2,158,186 |
| B | 0.113 | 89 | 17 | 5,674,459 |
| C | 0.080 | 125 | 25 | 14,324,774 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zhao, C.; Jing, P.; Chen, B.; He, G.; Zhang, Z.; Zhang, J.; Li, M.; Wang, J. Estimation of the Motion Response of a Large Ocean Buoy in the South China Sea. J. Mar. Sci. Eng. 2025, 13, 822. https://doi.org/10.3390/jmse13040822
Li Y, Zhao C, Jing P, Chen B, He G, Zhang Z, Zhang J, Li M, Wang J. Estimation of the Motion Response of a Large Ocean Buoy in the South China Sea. Journal of Marine Science and Engineering. 2025; 13(4):822. https://doi.org/10.3390/jmse13040822
Chicago/Turabian StyleLi, Yunzhou, Chuankai Zhao, Penglin Jing, Bangqi Chen, Guanghua He, Zhigang Zhang, Jiming Zhang, Min Li, and Juncheng Wang. 2025. "Estimation of the Motion Response of a Large Ocean Buoy in the South China Sea" Journal of Marine Science and Engineering 13, no. 4: 822. https://doi.org/10.3390/jmse13040822
APA StyleLi, Y., Zhao, C., Jing, P., Chen, B., He, G., Zhang, Z., Zhang, J., Li, M., & Wang, J. (2025). Estimation of the Motion Response of a Large Ocean Buoy in the South China Sea. Journal of Marine Science and Engineering, 13(4), 822. https://doi.org/10.3390/jmse13040822