Figure 1.
Schematic of overset grid.
Figure 1.
Schematic of overset grid.
Figure 2.
KCS ship and KP505 propeller geometry model.
Figure 2.
KCS ship and KP505 propeller geometry model.
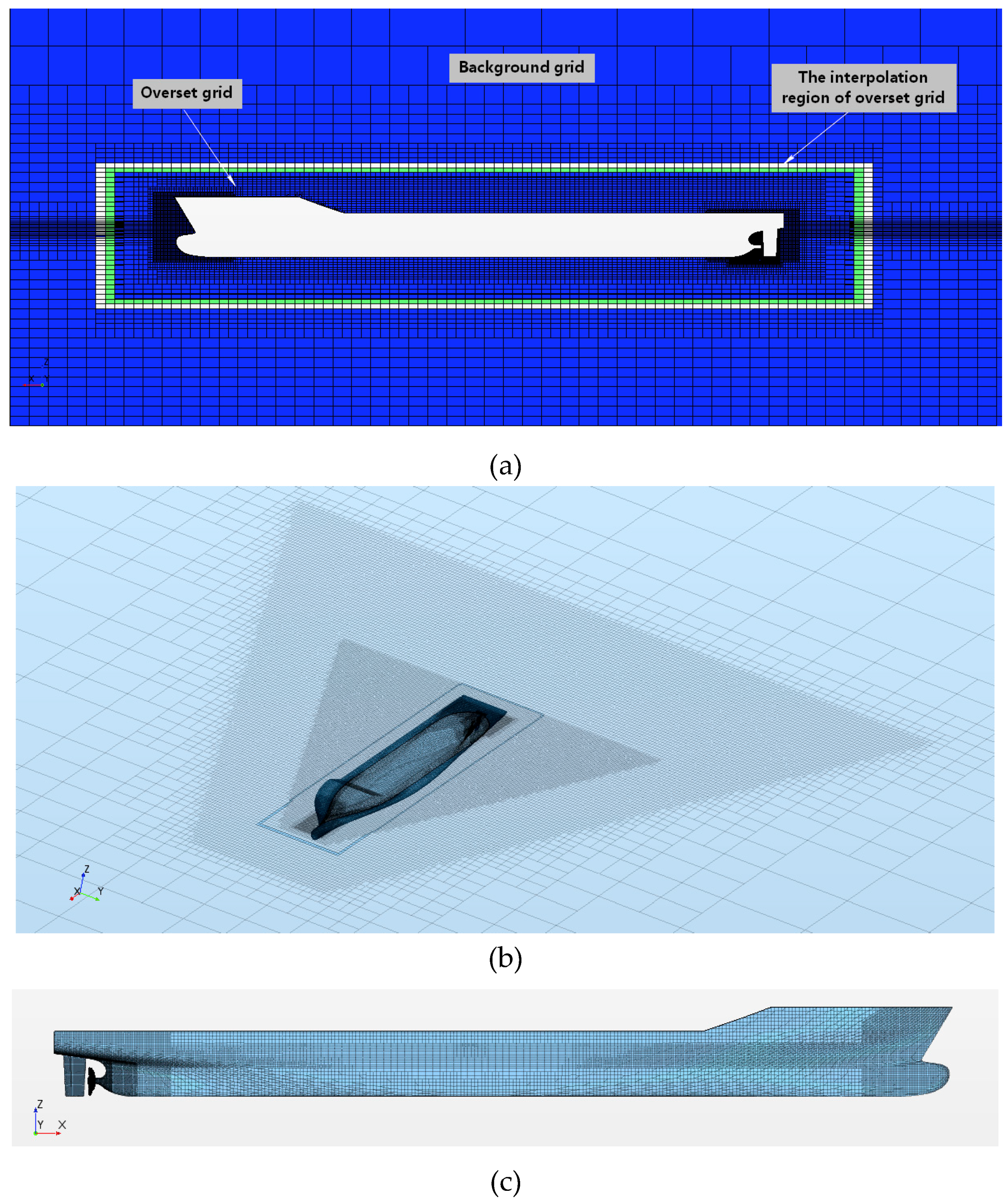
Figure 3.
Computational domain and boundary condition: (a) Background domain and boundary condition; (b) Overset grid domain and hull-propeller-rudder model.
Figure 3.
Computational domain and boundary condition: (a) Background domain and boundary condition; (b) Overset grid domain and hull-propeller-rudder model.
Figure 4.
Computational grid distribution: (a) The distribution of overset grid; (b) The grids near the free surface; (c) Hull surface grids.
Figure 4.
Computational grid distribution: (a) The distribution of overset grid; (b) The grids near the free surface; (c) Hull surface grids.
Figure 5.
Schematic plan of heave motion rule.
Figure 5.
Schematic plan of heave motion rule.
Figure 6.
Schematic plan of pitch motion rule.
Figure 6.
Schematic plan of pitch motion rule.
Figure 7.
Schematic plan of different coordinate systems.
Figure 7.
Schematic plan of different coordinate systems.
Figure 8.
Comparison for wave contour: (a) Model test; (b) CFD calculation.
Figure 8.
Comparison for wave contour: (a) Model test; (b) CFD calculation.
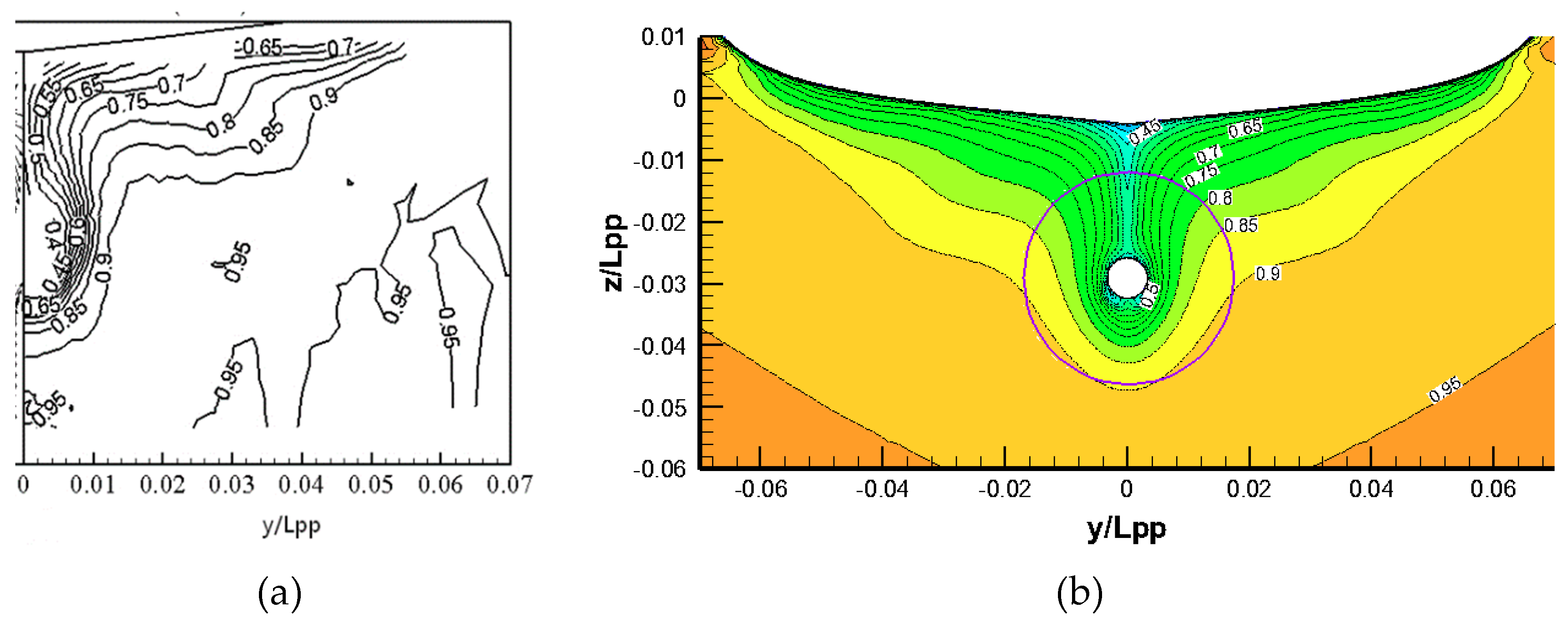
Figure 9.
Comparison for velocity contour (): (a) Model test; (b) CFD calculation.
Figure 9.
Comparison for velocity contour (): (a) Model test; (b) CFD calculation.
Figure 10.
Free surface in a heave period (): (a) t = 0.25 Te; (b) t = 0.50 Te; (c) t = 0.75 Te; (d) t = 1.0 Te.
Figure 10.
Free surface in a heave period (): (a) t = 0.25 Te; (b) t = 0.50 Te; (c) t = 0.75 Te; (d) t = 1.0 Te.
Figure 11.
Free surface in a pitch period (): (a) t = 0.25 Te; (b) t = 0.50 Te; (c) t = 0.75 Te; (d) t = 1.0 Te.
Figure 11.
Free surface in a pitch period (): (a) t = 0.25 Te; (b) t = 0.50 Te; (c) t = 0.75 Te; (d) t = 1.0 Te.
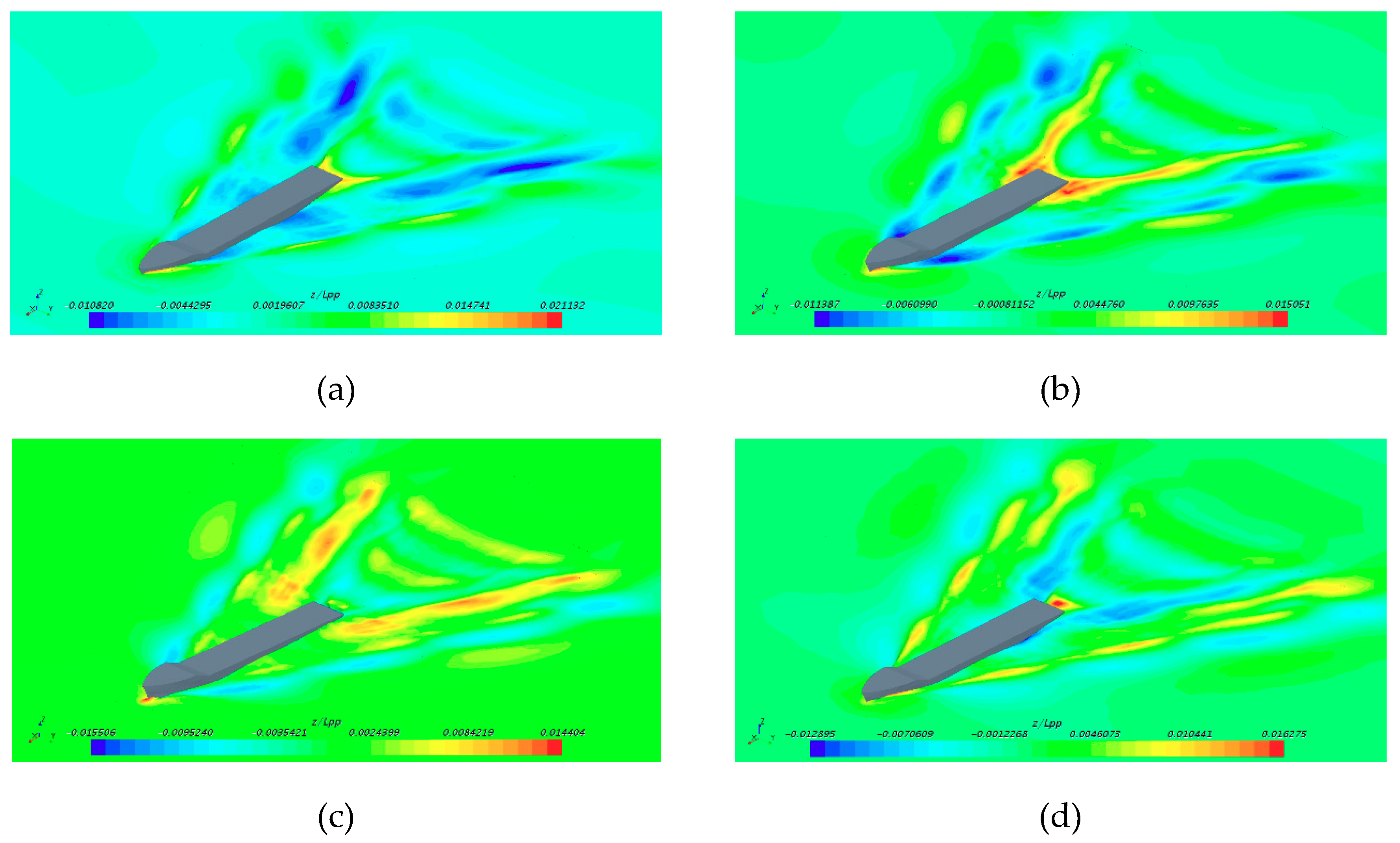
Figure 12.
Distribution of the nominal wake fields in heave motion condition (, ): (a) t = 0.25 Te; (b) t = 0.50 Te; (c) t = 0.75 Te; (d) t = 1.0 Te.
Figure 12.
Distribution of the nominal wake fields in heave motion condition (, ): (a) t = 0.25 Te; (b) t = 0.50 Te; (c) t = 0.75 Te; (d) t = 1.0 Te.
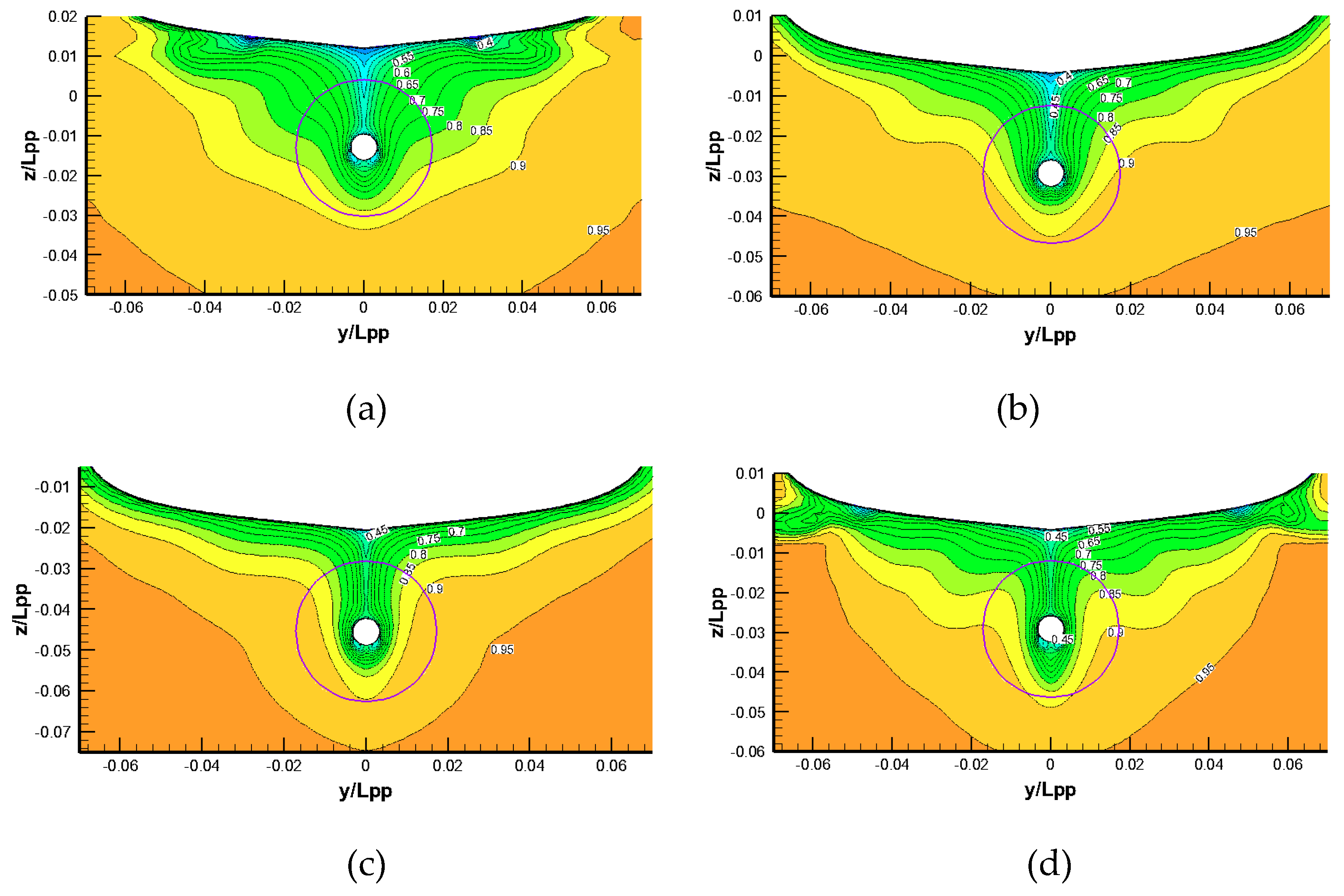
Figure 13.
Distribution of the nominal wake fields in pitch motion condition (, ): (a) t = 0.25 Te; (b) t = 0.50 Te; (c) t = 0.75 Te; (d) t = 1.0 Te.
Figure 13.
Distribution of the nominal wake fields in pitch motion condition (, ): (a) t = 0.25 Te; (b) t = 0.50 Te; (c) t = 0.75 Te; (d) t = 1.0 Te.
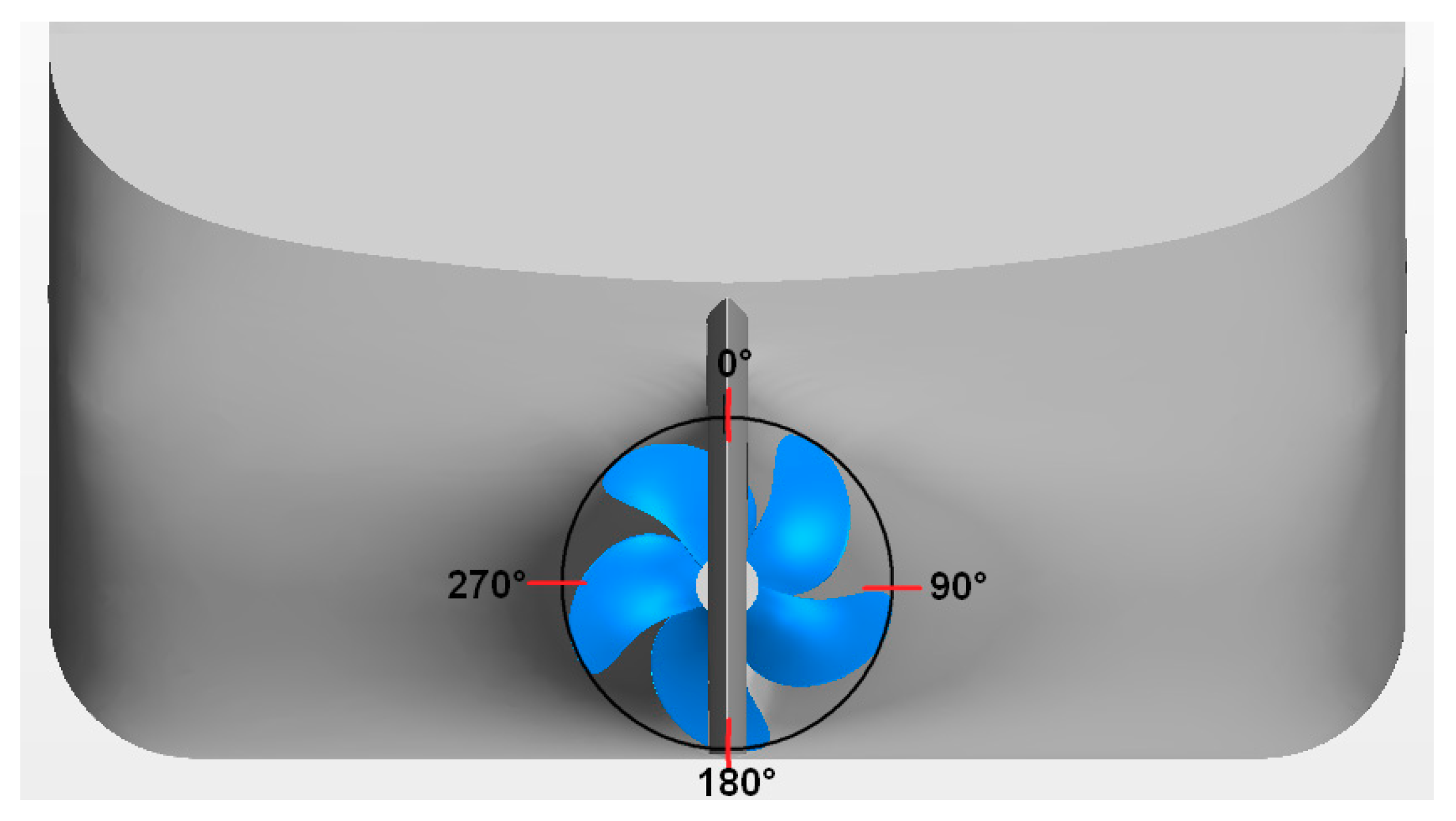
Figure 14.
Definition of circumferential angle.
Figure 14.
Definition of circumferential angle.
Figure 15.
Circumferential distribution of axial velocity at different time for 0.7 R radius: (a) Heave motion ; (b) Pitch motion .
Figure 15.
Circumferential distribution of axial velocity at different time for 0.7 R radius: (a) Heave motion ; (b) Pitch motion .
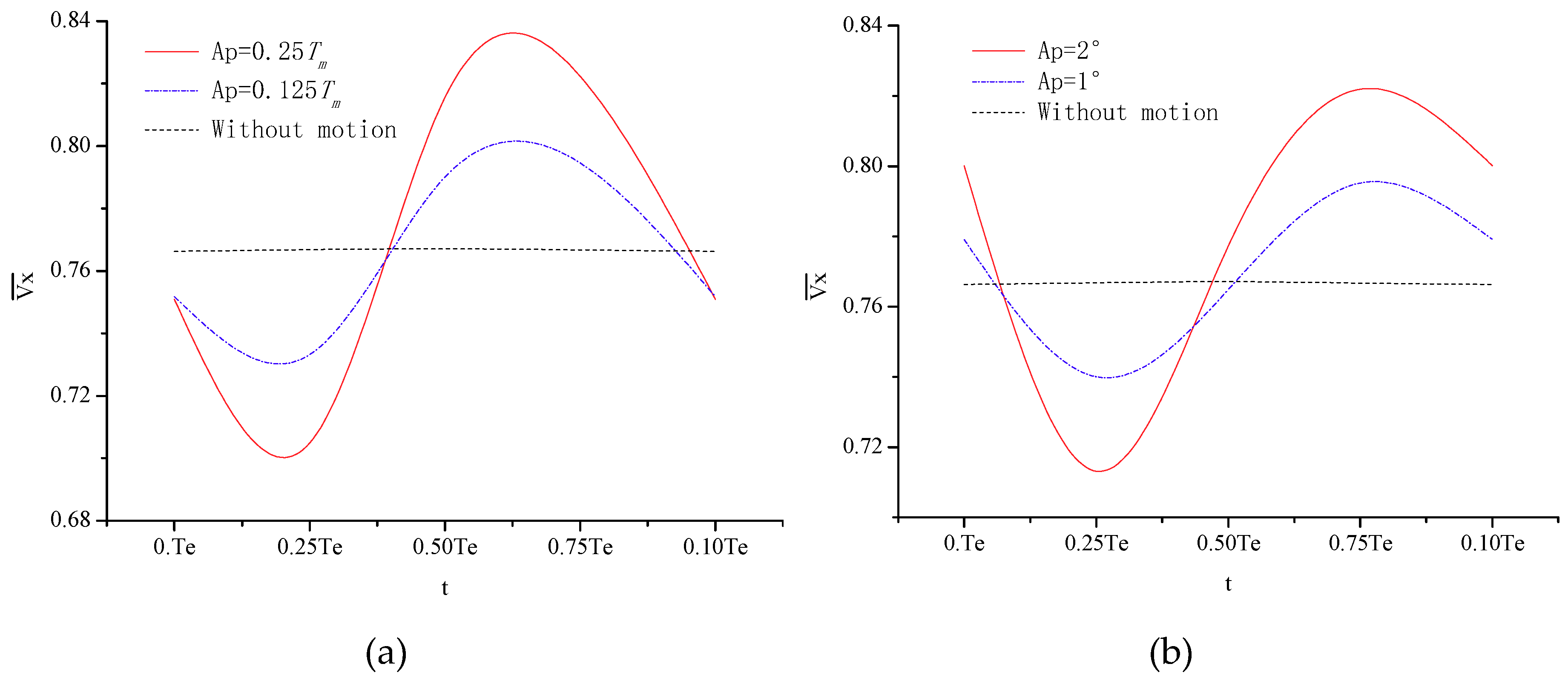
Figure 16.
Average axial velocity curves at disk plane in a motion period: (a) Heave motion; (b) Pitch motion.
Figure 16.
Average axial velocity curves at disk plane in a motion period: (a) Heave motion; (b) Pitch motion.
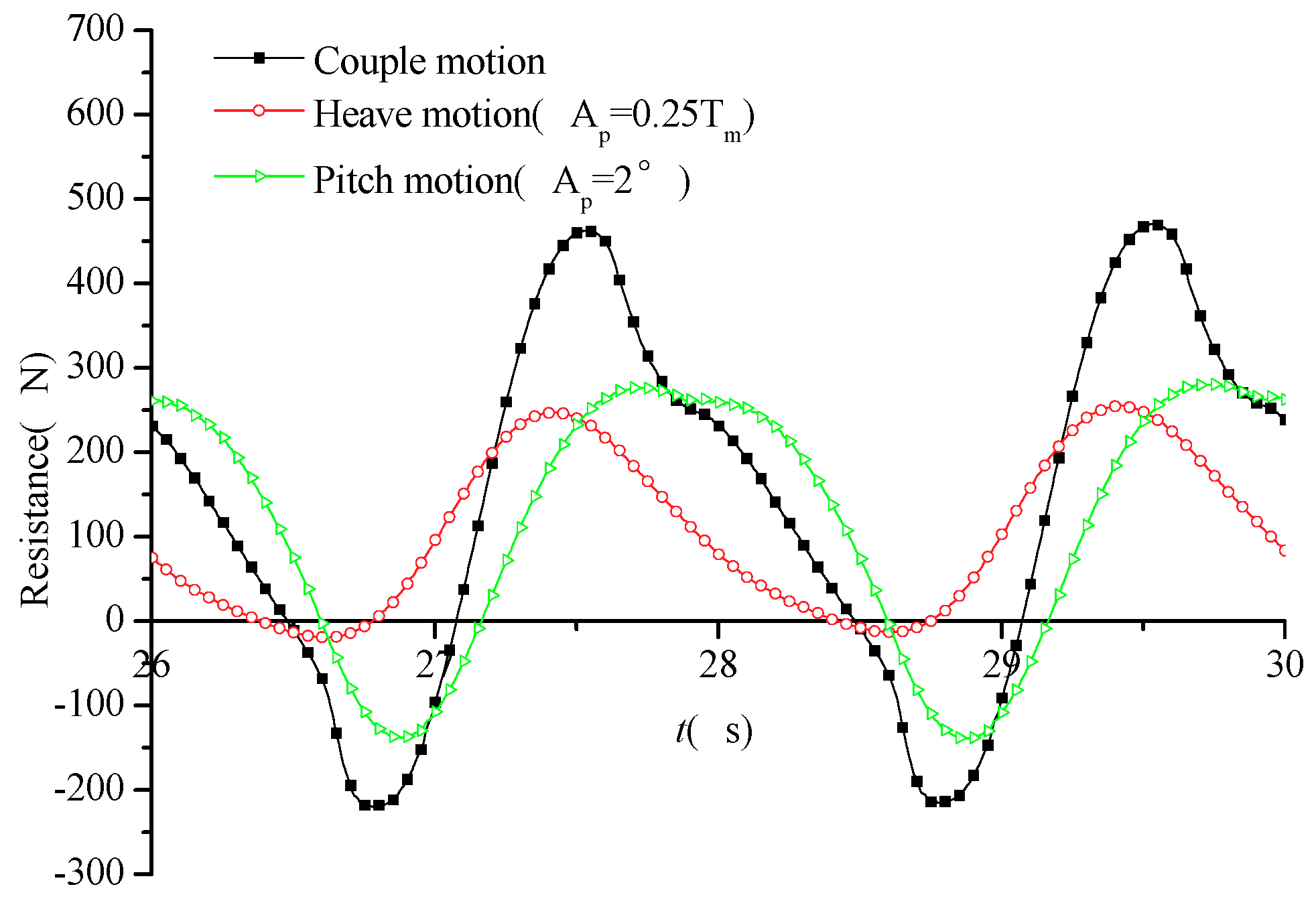
Figure 17.
Time domain curves of resistance for different motion condition.
Figure 17.
Time domain curves of resistance for different motion condition.
Figure 18.
Wave contour on the hull surface at the specific moment: (a) Without motion; (b) Heave motion; (c) Pitch motion; (d) Couple motion.
Figure 18.
Wave contour on the hull surface at the specific moment: (a) Without motion; (b) Heave motion; (c) Pitch motion; (d) Couple motion.
Figure 19.
Time domain curve of thrust for different motion condition.
Figure 19.
Time domain curve of thrust for different motion condition.
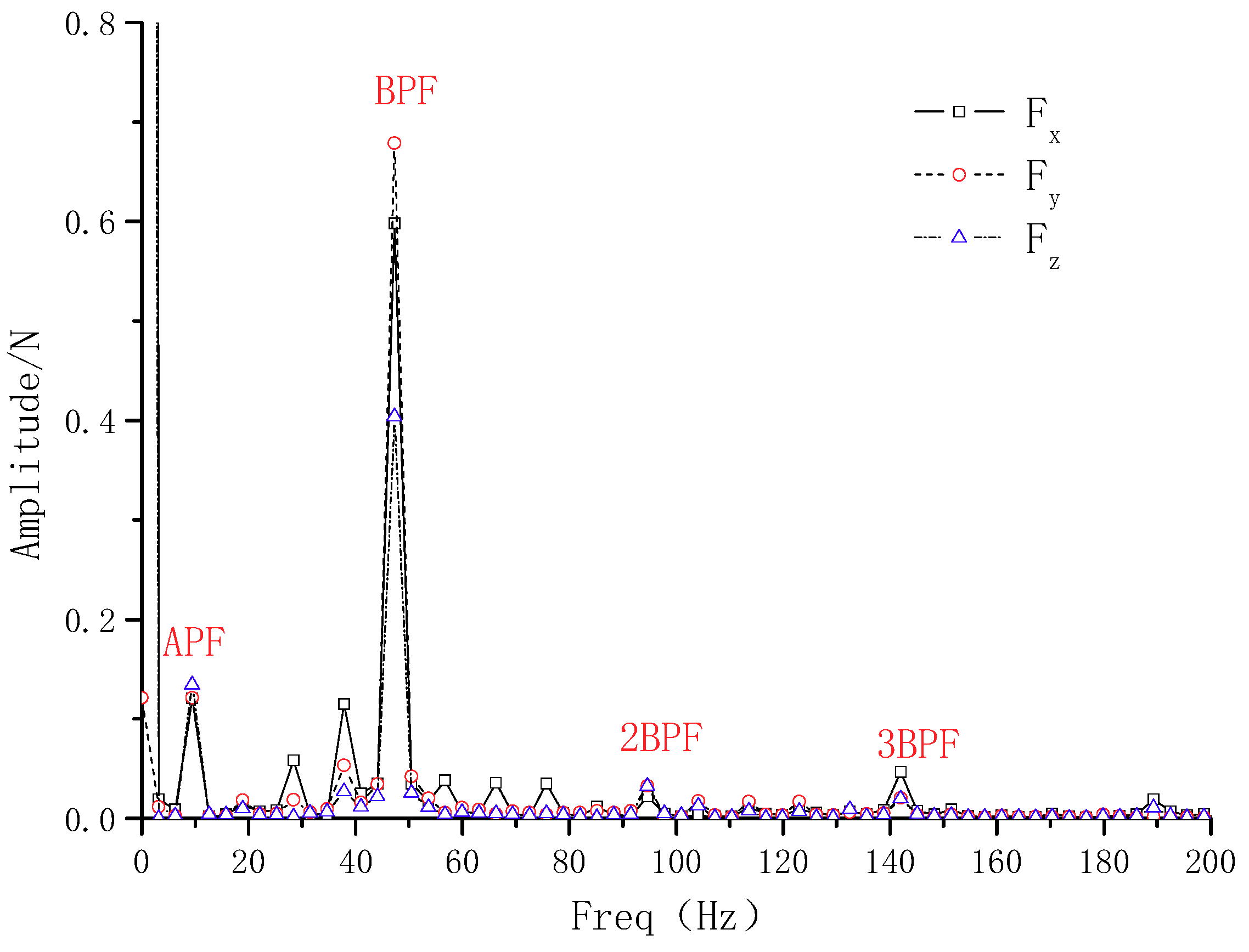
Figure 20.
Frequency domain curves of propeller exciting force without motion.
Figure 20.
Frequency domain curves of propeller exciting force without motion.
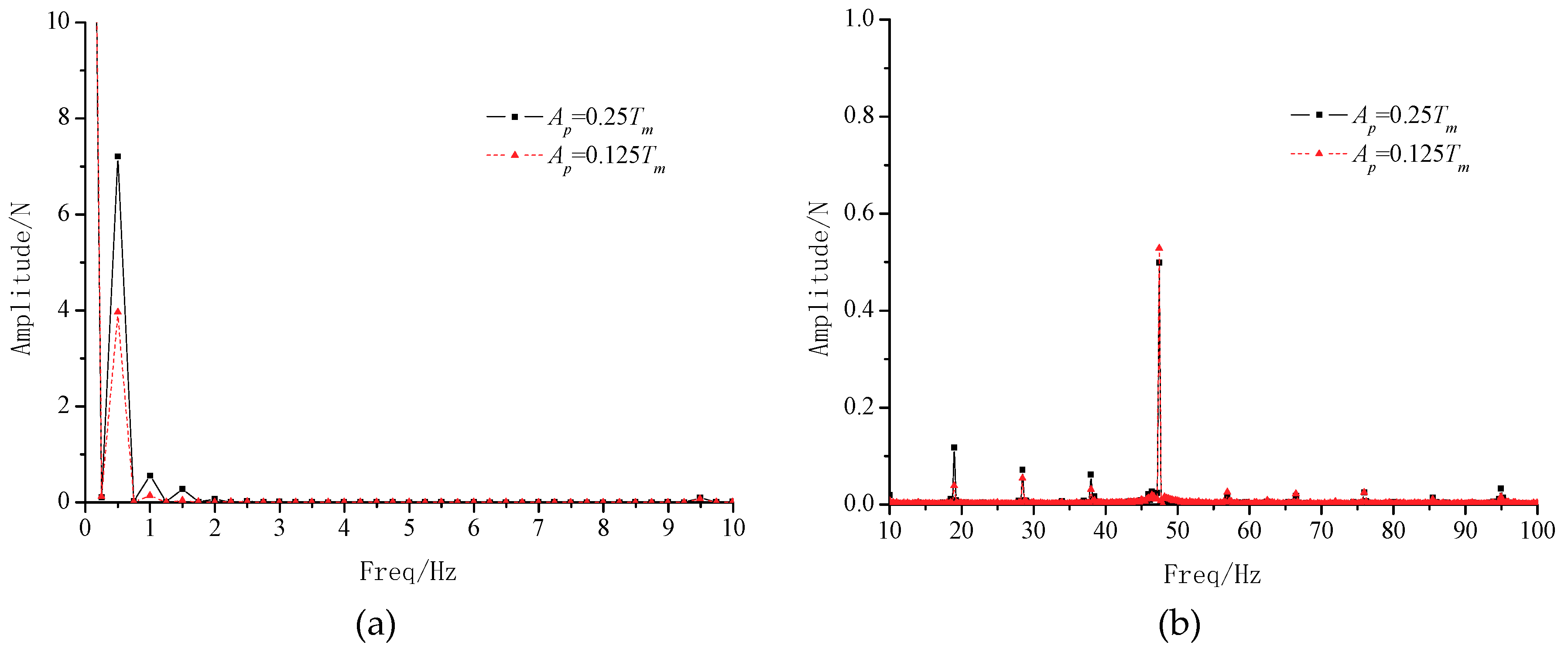
Figure 21.
Frequency domain curves of thrust with heave motion: (a) 0–10 Hz; (b) 10–100 Hz.
Figure 21.
Frequency domain curves of thrust with heave motion: (a) 0–10 Hz; (b) 10–100 Hz.
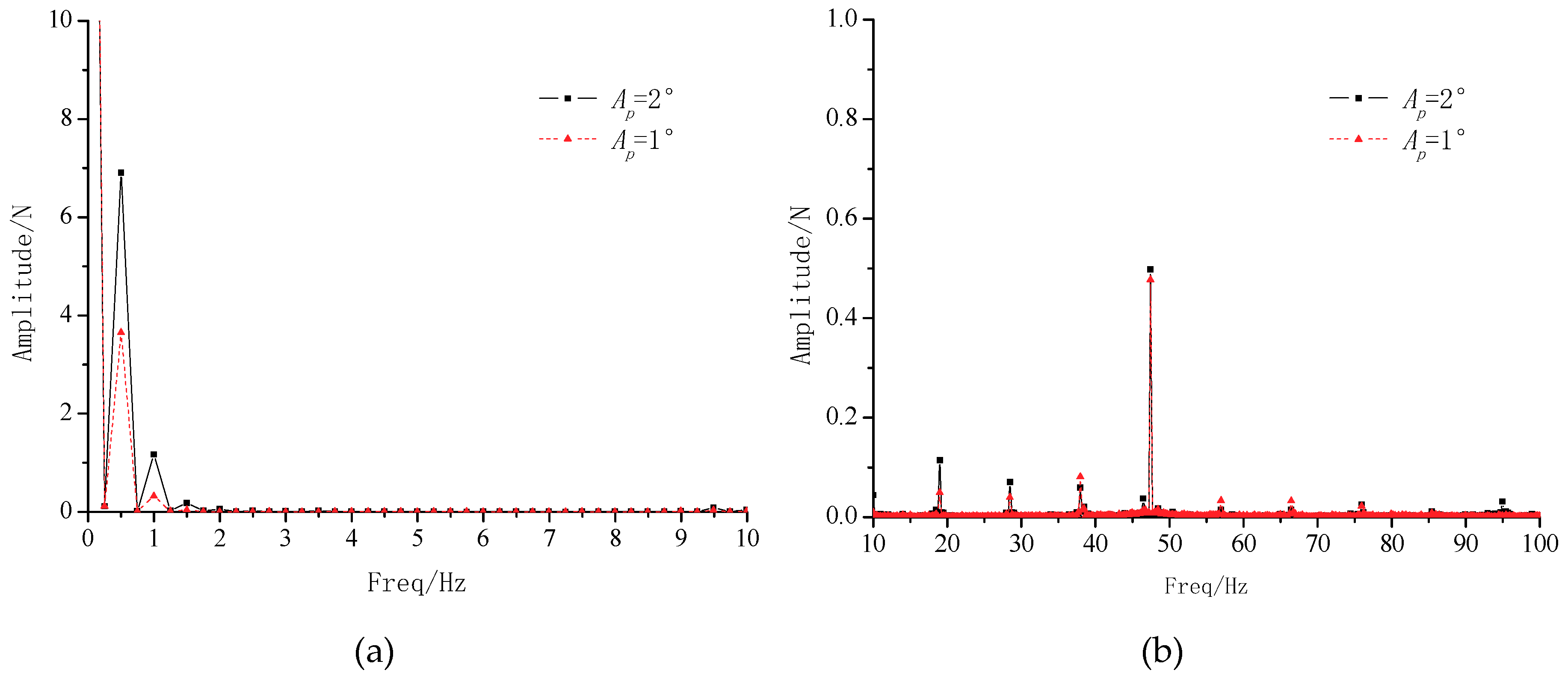
Figure 22.
Frequency domain curves of thrust with pitch motion: (a) 0–10 Hz; (b) 10–100 Hz.
Figure 22.
Frequency domain curves of thrust with pitch motion: (a) 0–10 Hz; (b) 10–100 Hz.
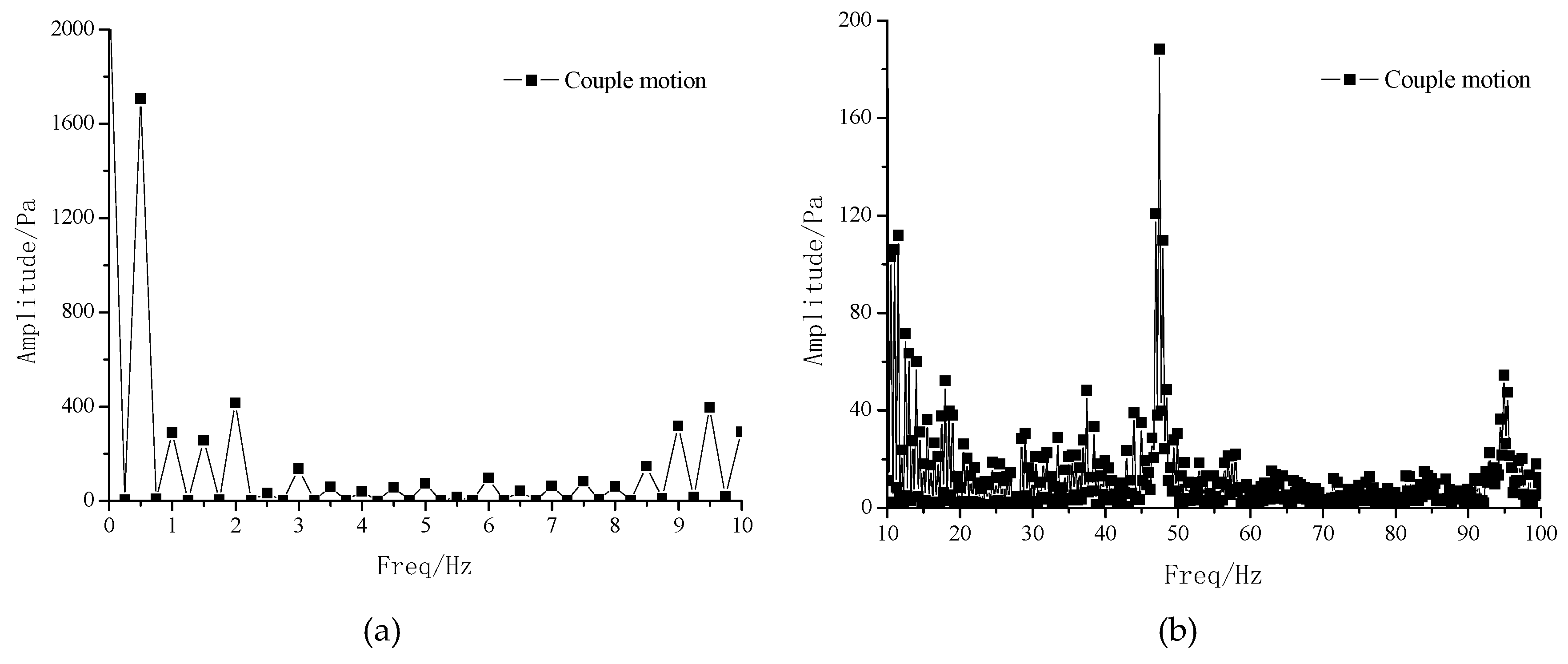
Figure 23.
Frequency domain curves of thrust with couple motion: (a) 0–10 Hz; (b) 10–100 Hz.
Figure 23.
Frequency domain curves of thrust with couple motion: (a) 0–10 Hz; (b) 10–100 Hz.
Figure 24.
Arrangement of fluctuation pressure measurement points.
Figure 24.
Arrangement of fluctuation pressure measurement points.
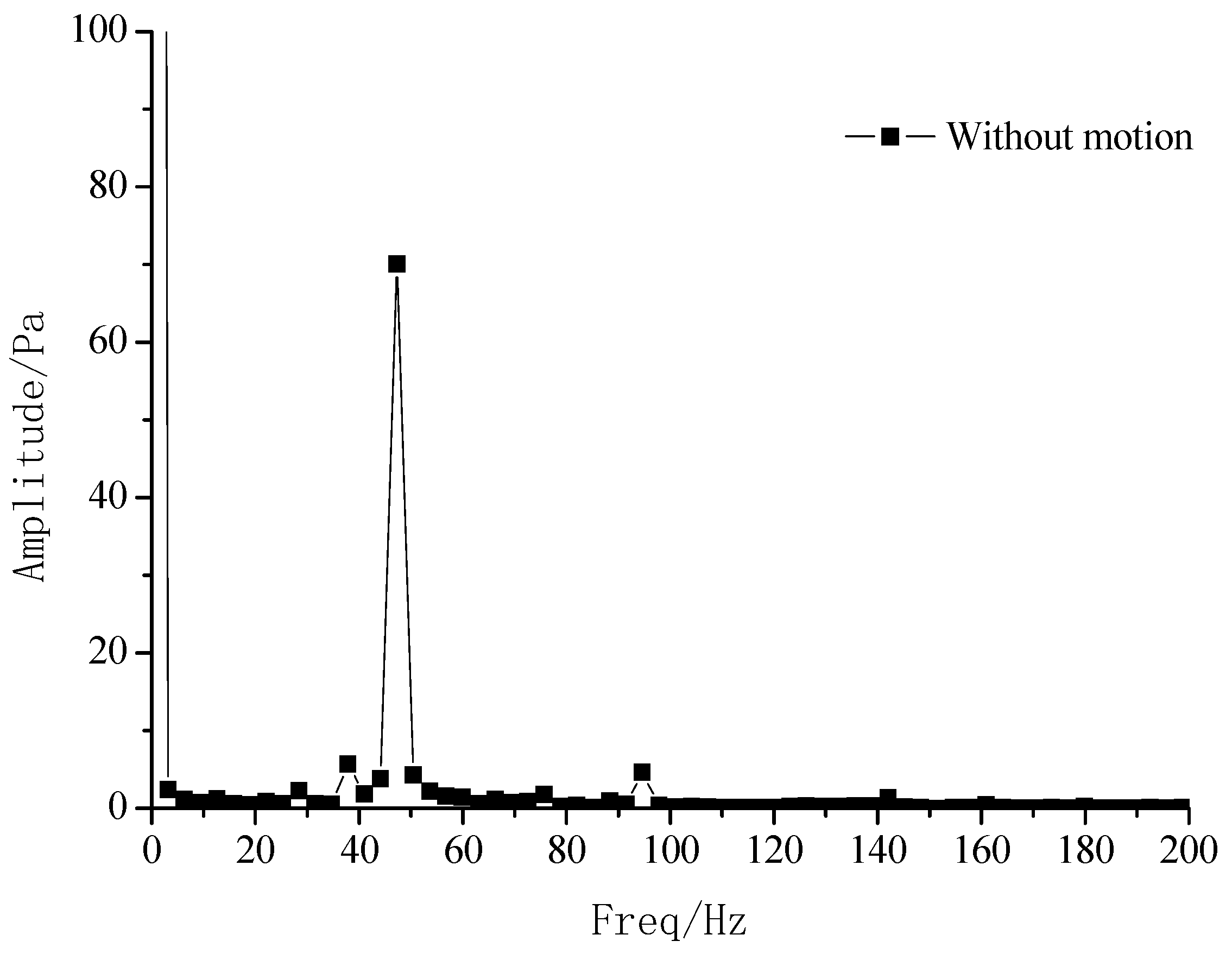
Figure 25.
Frequency domain curves of P0 point without motion.
Figure 25.
Frequency domain curves of P0 point without motion.
Figure 26.
Frequency domain curves of P0 point in heave motion condition: (a) 0–10 Hz; (b) 10–100 Hz.
Figure 26.
Frequency domain curves of P0 point in heave motion condition: (a) 0–10 Hz; (b) 10–100 Hz.
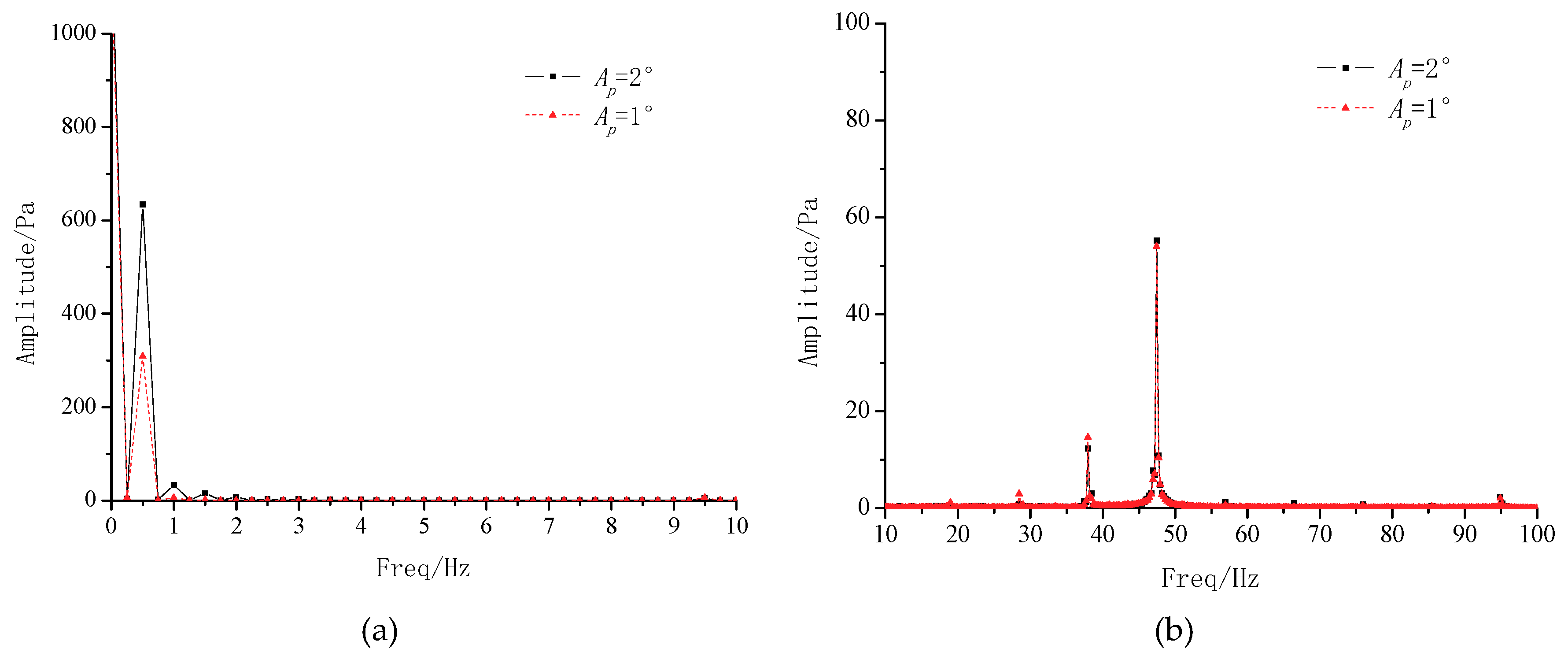
Figure 27.
Frequency domain curves of P0 point in pitch motion condition: (a) 0–10 Hz; (b) 10–100 Hz.
Figure 27.
Frequency domain curves of P0 point in pitch motion condition: (a) 0–10 Hz; (b) 10–100 Hz.
Figure 28.
Frequency domain curves of P0 point in couple motion condition: (a) 0–10 Hz; (b) 10–100 Hz.
Figure 28.
Frequency domain curves of P0 point in couple motion condition: (a) 0–10 Hz; (b) 10–100 Hz.
Figure 29.
Fluctuation peaks at motion frequency (0.5 Hz) and blade frequency (47.5 Hz): (a) 0.5 Hz; (b) 47.5 Hz.
Figure 29.
Fluctuation peaks at motion frequency (0.5 Hz) and blade frequency (47.5 Hz): (a) 0.5 Hz; (b) 47.5 Hz.
Table 1.
Principle parameters of KCS model.
Table 1.
Principle parameters of KCS model.
| Lpp (m) | 7.2786 |
|---|
| Draught (m) | 0.3418 |
| Wetted surface (m2) | 9.438 |
| Reynolds No. | 1.4 × 107 |
| Froude No. | 0.26 |
Table 2.
Principle parameters of KP505 propeller model.
Table 2.
Principle parameters of KP505 propeller model.
| Diameter (m) | 0.250 | Area Ratio | 0.70 |
|---|
| No. of blades | 5 | P/D (0.7R) | 1.00 |
| Hub ratio | 0.167 | Skew angle(°) | 12.66 |
Table 3.
Hydrodynamic calculation results of hull-propeller-rudder system.
Table 3.
Hydrodynamic calculation results of hull-propeller-rudder system.
| Description | Resistance/N | Thrust/N | Moment/N.m |
|---|
| CFD (with rudder) | 90.5 | 57.22 | 2.62 |
| EFD (without rudder) | 90.0 | 59.9 | 2.53 |
| Error | +0.56% | −4.47% | +1.58% |
Table 4.
Spatial non-uniformity of axial velocity at different time for 0.7 R radius.
Table 4.
Spatial non-uniformity of axial velocity at different time for 0.7 R radius.
| Condition | Without Heave | 0.25Te | 0.50Te | 0.75Te | 1.0Te |
|---|
| Heave | Pitch | Heave | Pitch | Heave | Pitch | Heave | Pitch |
|---|
| Average value | 0.796 | 0.731 | 0.740 | 0.846 | 0.807 | 0.855 | 0.855 | 0.777 | 0.830 |
| Peak value | 0.868 | 0.808 | 0.830 | 0.915 | 0.891 | 0.913 | 0.916 | 0.847 | 0.897 |
| Valley value | 0.459 | 0.439 | 0.403 | 0.467 | 0.433 | 0.530 | 0.531 | 0.486 | 0.529 |
| Spatial non-uniformity (%) | 51.37 | 50.45 | 57.76 | 52.85 | 56.77 | 44.76 | 45.07 | 46.44 | 44.34 |
Table 5.
Temporal non-uniformity of axial velocity in a motion period.
Table 5.
Temporal non-uniformity of axial velocity in a motion period.
| Condition | Without Motion | Heave | Pitch |
|---|
| | | |
|---|
Average value
Peak value | 0.7666 | 0.7661 | 0.7677 | 0.7704 | 0.7689 |
| 0.7671 | 0.8361 | 0.8014 | 0.8221 | 0.7954 |
| Valley value | 0.7663 | 0.6999 | 0.7301 | 0.7129 | 0.7394 |
| Temporal non-uniformity (%) | 0.11 | 17.78 | 9.28 | 14.17 | 7.28 |
Table 6.
Time average resistance for hull-propeller-rudder system.
Table 6.
Time average resistance for hull-propeller-rudder system.
| Condition | Without Motion | Heave | Pitch | Couple |
|---|
| | | |
|---|
| Time average resistance (N) | 90.50 | 139.58 | 107.52 | 153.54 | 109.22 | 136.39 |
| Resistance increase percent (%) | - | 54.23 | 18.80 | 69.66 | 20.68 | 50.70 |
Table 7.
Time average thrust for propeller.
Table 7.
Time average thrust for propeller.
| Condition | Without Motion | Heave | Pitch | Couple |
|---|
| | | |
|---|
| Time average thrust (N) | 57.22 | 33.31 | 34.50 | 32.94 | 34.35 | 33.76 |
| Thrust decrease percent (%) | - | −41.79 | −39.71 | −42.43 | −39.97 | −41.00 |
Table 8.
Peaks of horizontal force for different motion condition (unit: N).
Table 8.
Peaks of horizontal force for different motion condition (unit: N).
| Condition | 0.5 Hz | 1.0 Hz | 1.5 Hz | 9.5 Hz | 19.0 Hz | 28.5 Hz | 47.5 Hz |
|---|
| Without motion | - | - | - | 0.12 | 0.02 | 0.05 | 0.68 |
| Heave | Ap = 0.25Tm | 0.62 | 0.2 | 0.06 | 0.34 | 0.02 | 0.04 | 0.75 |
| Ap = 0.125Tm | 0.33 | 0.06 | 0.01 | 0.36 | 0.04 | 0.04 | 0.73 |
| Pitch | Ap = 2° | 1.04 | 0.16 | 0.05 | 0.35 | 0.02 | 0.04 | 0.76 |
| Ap = 1° | 0.51 | 0.08 | 0.02 | 0.37 | 0.03 | 0.05 | 0.71 |
| Couple | 1.43 | 0.53 | 0.23 | 0.35 | 0.02 | 0.04 | 0.78 |
Table 9.
Peaks of vertical force for different motion condition (unit: N).
Table 9.
Peaks of vertical force for different motion condition (unit: N).
| Condition | 0.5 Hz | 1.0 Hz | 1.5 Hz | 9.5 Hz | 19.0 Hz | 28.5 Hz | 47.5 Hz |
|---|
| Without motion | - | - | - | 0.13 | - | - | 0.40 |
| Heave | Ap = 0.25Tm | 2.44 | 0.11 | 0.08 | 0.36 | 0.03 | 0.02 | 0.46 |
| Ap = 0.125Tm | 1.265 | 0.03 | 0.01 | 0.38 | 0.01 | 0.01 | 0.58 |
| Pitch | Ap = 2° | 3.00 | 0.18 | 0.07 | 0.35 | 0.03 | 0.02 | 0.50 |
| Ap = 1° | 1.43 | 0.06 | 0.02 | 0.40 | 0.01 | 0.01 | 0.47 |
| Couple | 5.73 | 0.65 | 0.46 | 0.37 | 0.02 | 0.02 | 0.50 |

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}