Design and Experiment of a Plateau Data-Gathering AUV


Abstract
:1. Introduction
- 1)
- Efficient hydrodynamics and long endurance;
- 2)
- A hovering capability which is suitable for most tasks;
- 3)
- Lightweight and easy operation, which can be operated by two persons;
- 4)
- Well extendibility, which can be equipped with various sensors.
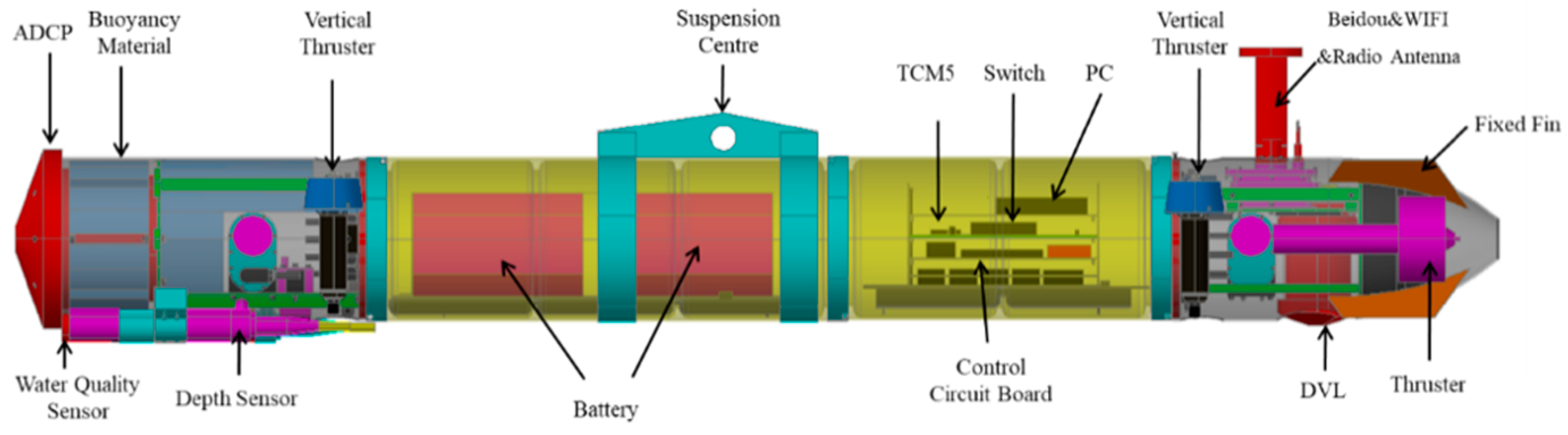
2. Design of the AUV Platform
- 1)
- The structure includes the pressure and non-pressure shells and the connecting frame. The pressure shell is made of non-magnetic, corrosion-resistant, lightweight, and high-strength aluminum alloy. The connecting frame is made of aluminum alloy and polypropylene. The non-pressure shell is made of high-strength carbon fiber.
- 2)
- The propulsion and maneuvering system consists of two horizontal and four vertical thrusters, which control surge velocity, heading, depth, and pitch.
- 3)
- Energy is provided by two rechargeable lithium batteries: a 7 S 80Ah control system battery and a 13 S 40 Ah power system battery.
- 4)
- The navigation and positioning system consists of a transcutaneous monitor (TCM) 5, a DVL, a depth sensor, and BeiDou.
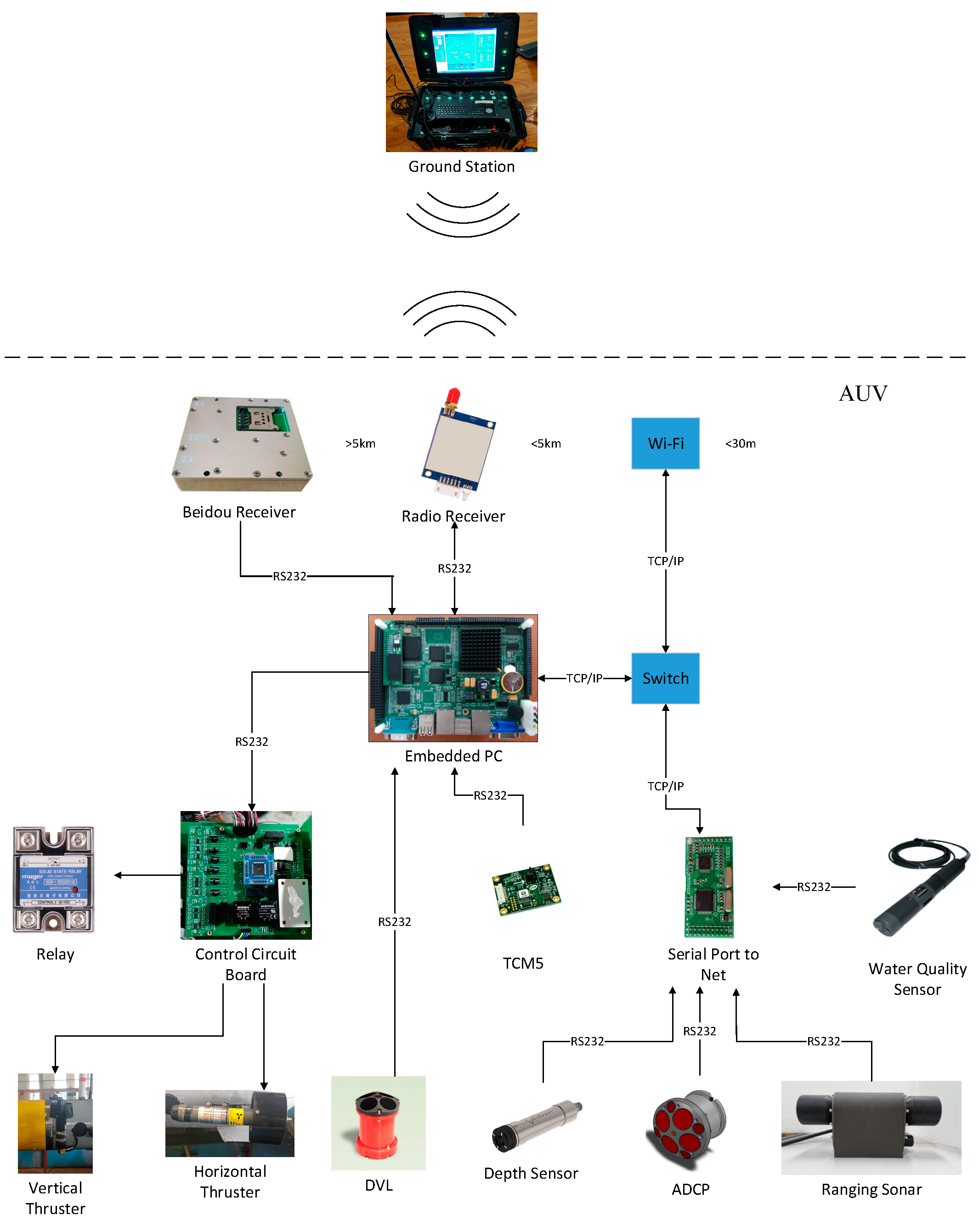
2.1. Design of the Control System
2.2. Software Architecture of the AUV
3. Control Strategies for the Developed AUV
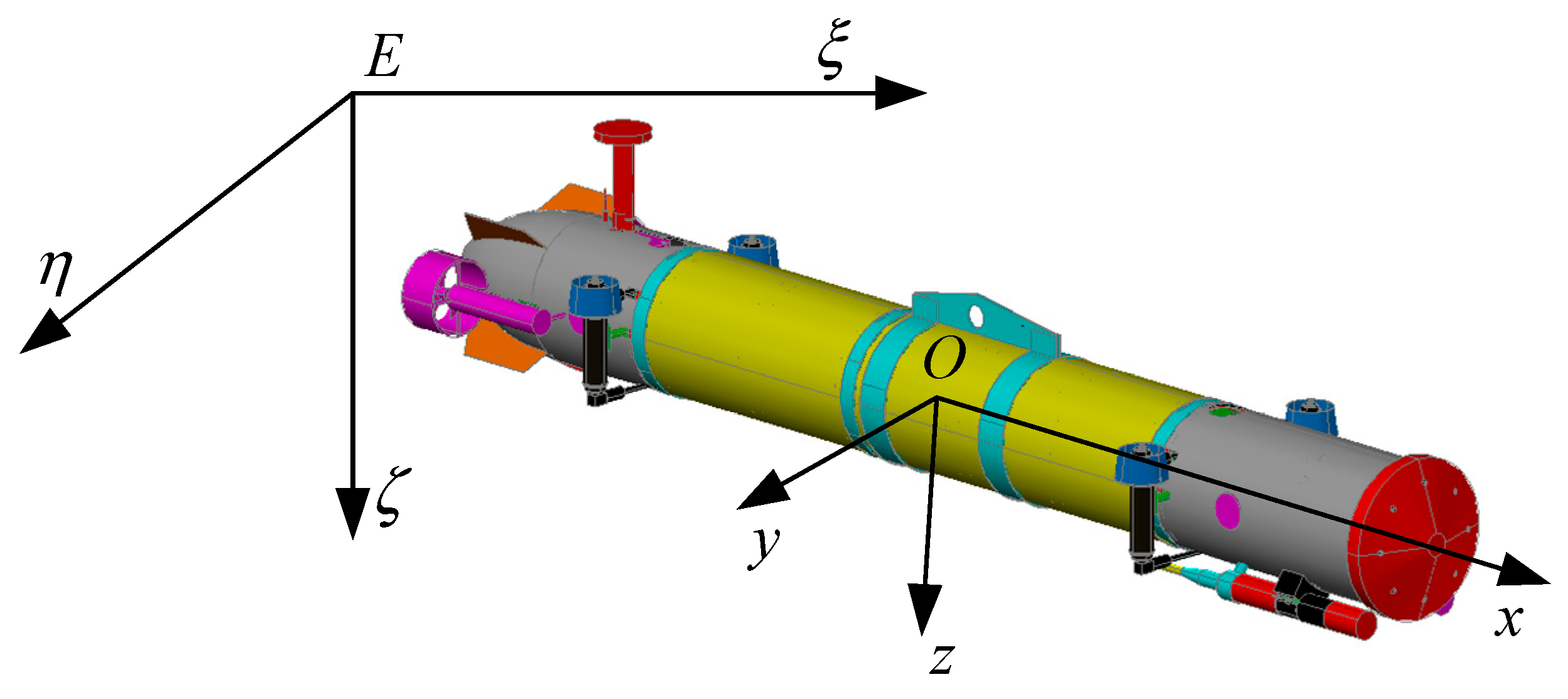
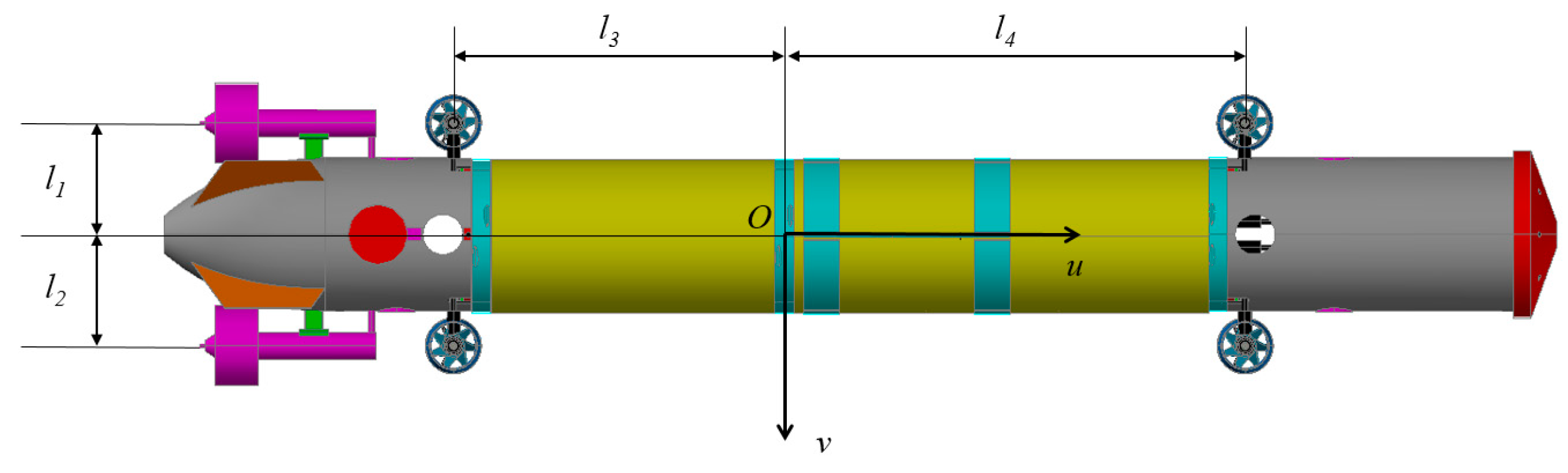
3.1. Dynamic Equations of Motion
3.2. Design of Path Tracking
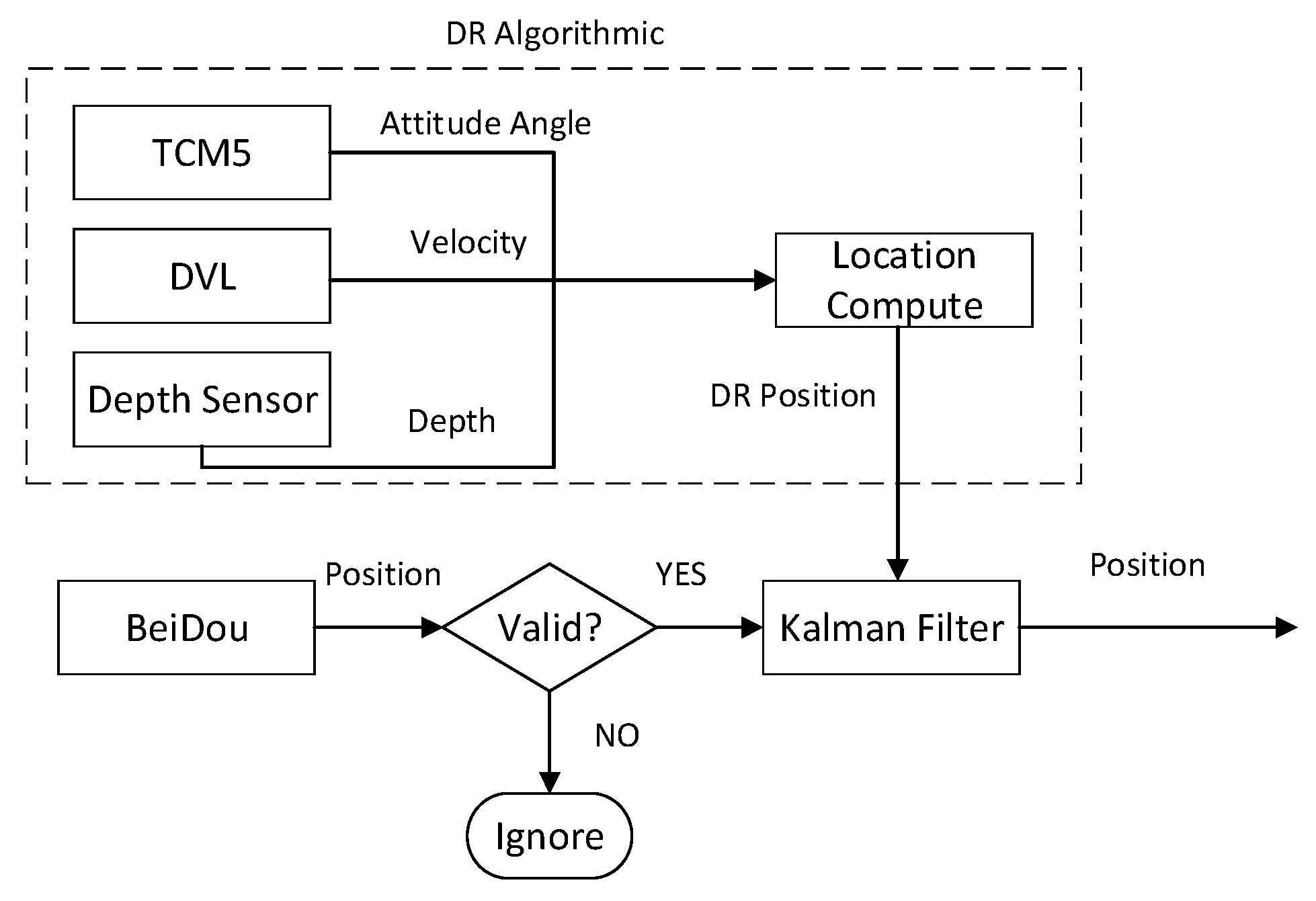
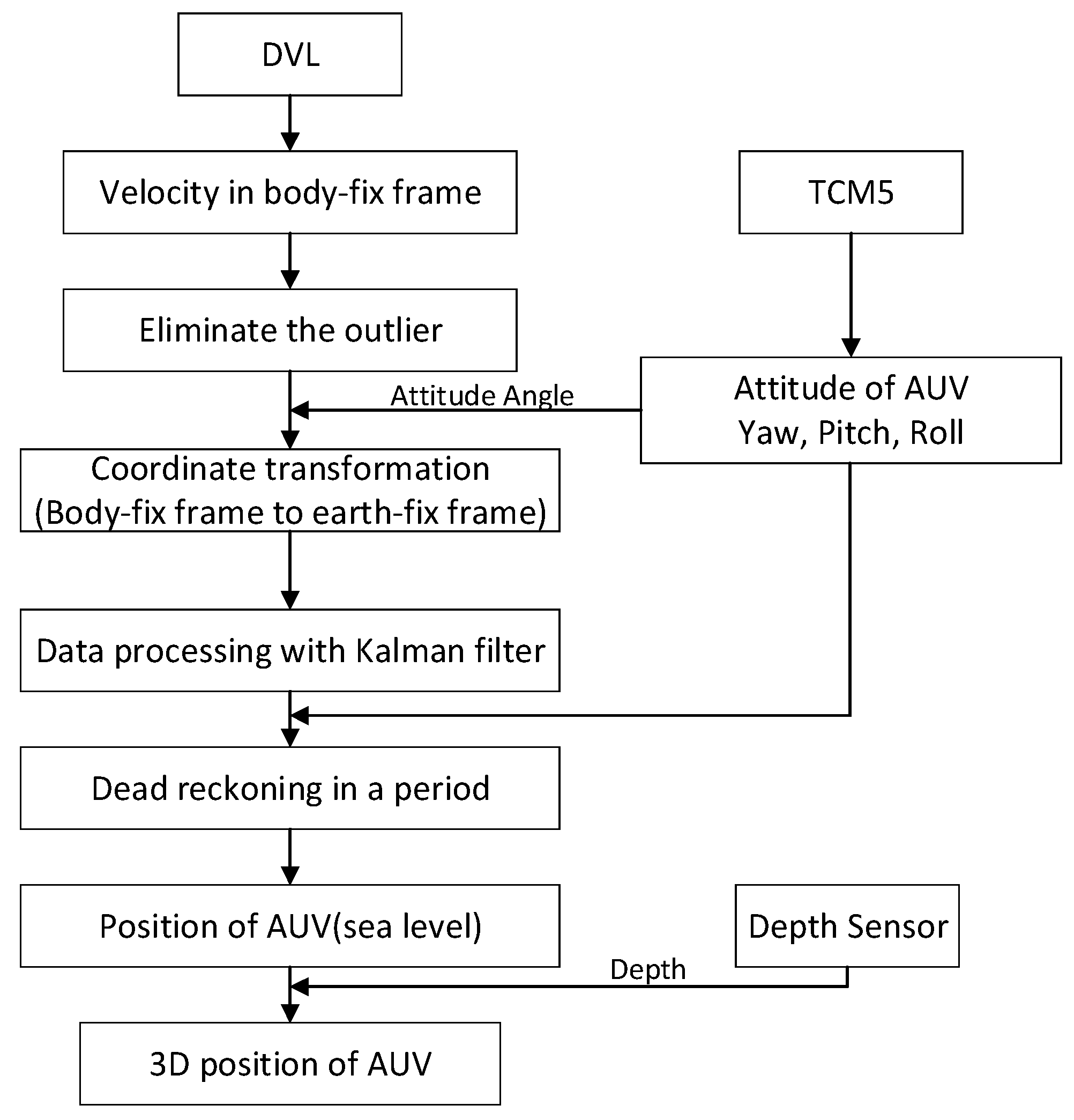
3.3. Design of Navigation Strategy
3.4. Controllers Design
3.4.1. Sliding Mode Controller Design
3.4.2 S-Plane Controller
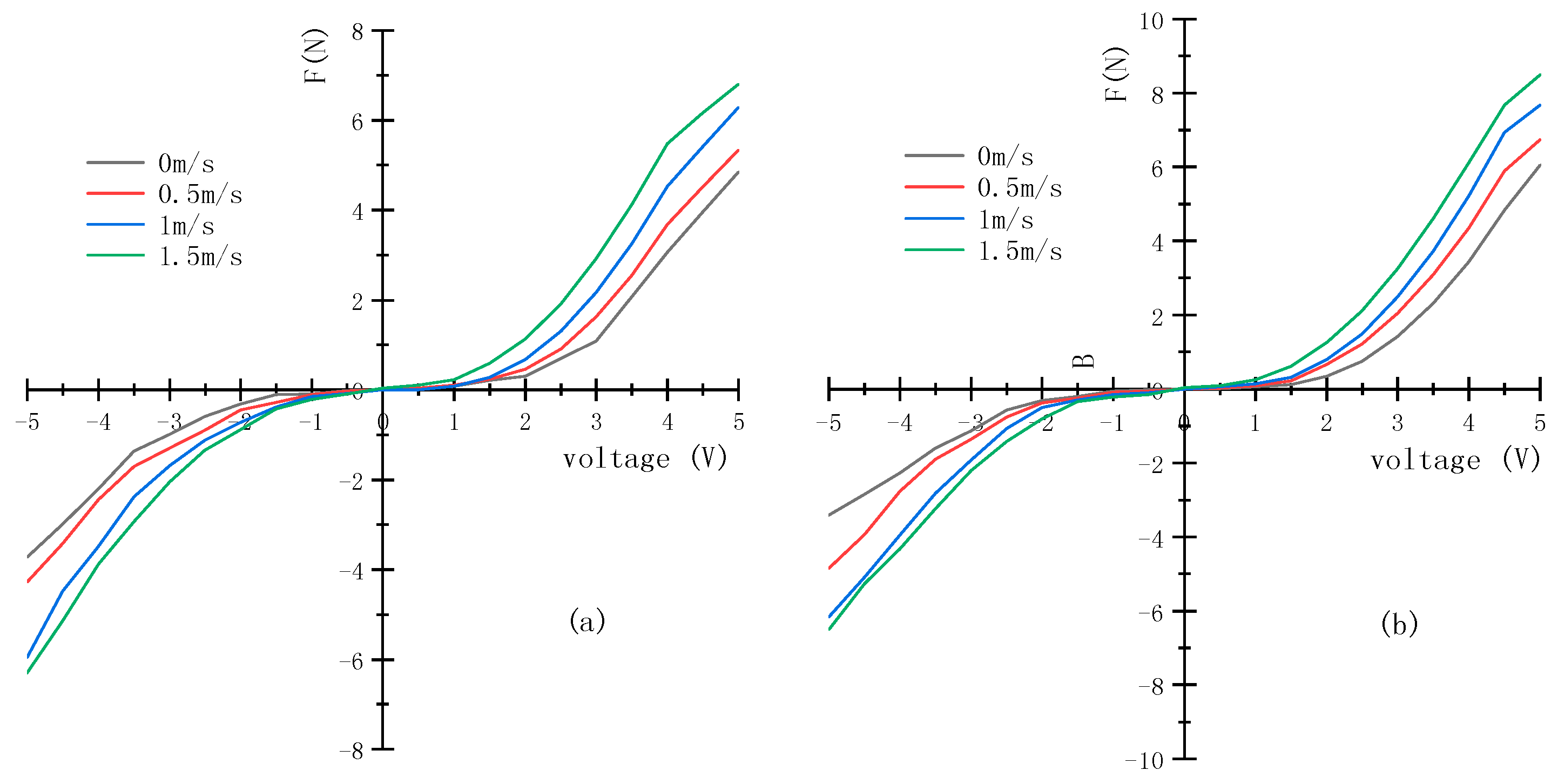
3.5. Control Allocation
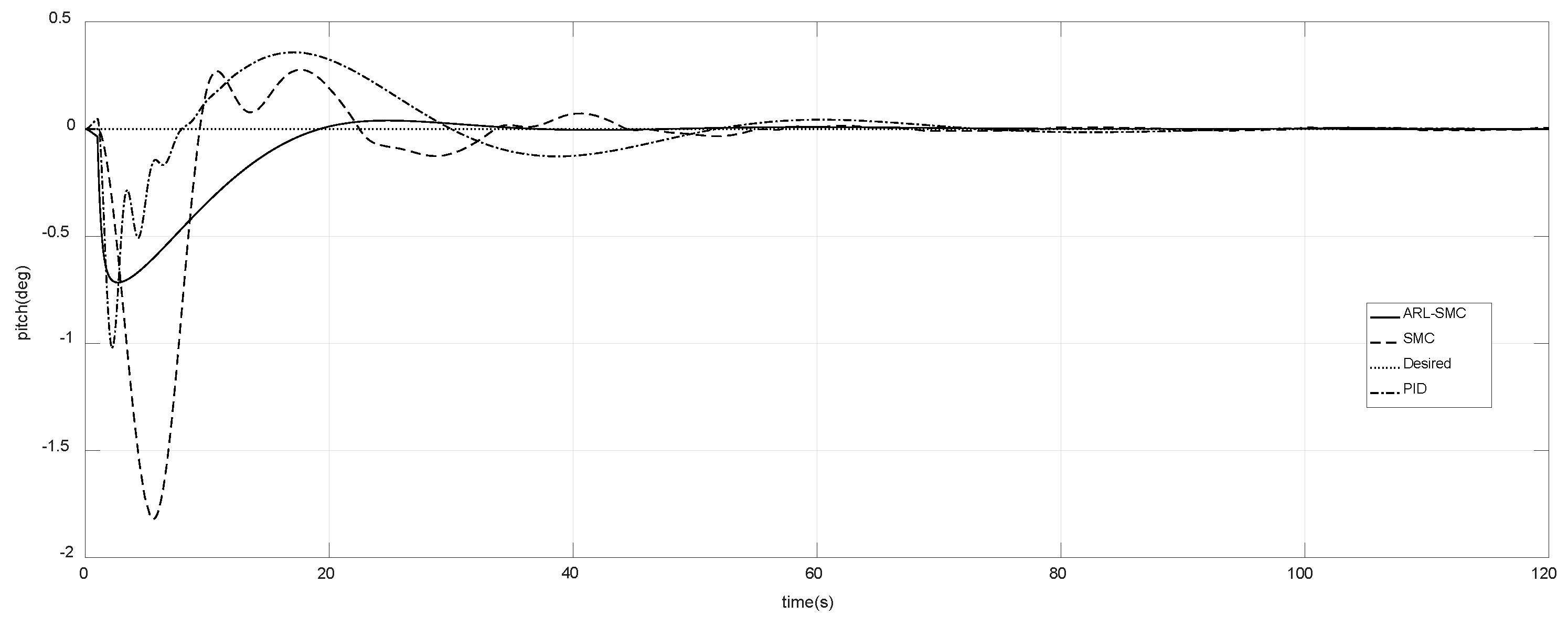
4. Simulations and Experiments
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cheng, G.; Jin, H. Permafrost and groundwater on the Qinghai-Tibet Plateau and in northeast China. Hydrogeol. J. 2013, 21, 5–23. [Google Scholar] [CrossRef]
- Pennington, J.T.; Blum, M.; Chavez, F.P. Seawater sampling by an autonomous underwater vehicle: “Gulper” sample validation for nitrate, chlorophyll, phytoplankton, and primary production. Limnol. Oceanogr. Methods 2016, 14, 14–23. [Google Scholar] [CrossRef]
- Xiang, X.; Lapierre, L.; Jouvencel, B. Smooth transition of AUV motion control: From fully-actuated to under-actuated configuration. Robot. Auton. Syst. 2015, 67, 14–22. [Google Scholar] [CrossRef] [Green Version]
- Yu, C.; Xiang, X.; Lapierre, L.; Qin, Z. Robust Magnetic Tracking of Subsea Cable by AUV in the Presence of Sensor Noise and Ocean Currents. IEEE J. Ocean. Eng. 2017, 43, 311–322. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.W.; Chen, E.; Guo, J. Efficient Seafloor Classification and Submarine Cable Route Design Using an Autonomous Underwater Vehicle. IEEE J. Ocean. Eng. 2017, 43, 7–18. [Google Scholar] [CrossRef]
- Xiang, X.; Jouvencel, B.; Parodi, O. Coordinated Formation Control of Multiple Autonomous Underwater Vehicles for Pipeline Inspection. Int. J. Adv. Robotic Syst. 2010, 7, 3. [Google Scholar] [CrossRef]
- Martins, A.; Almeida, J.; Almeida, C.; Matias, B.; Kapusniak, S.; Silva, E. EVA a Hybrid ROV/AUV for Underwater Mining Operations Support. In Proceedings of the 2018 OCEANS—MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018. [Google Scholar]
- Araya, A.; Kanazawa, T.; Shinohara, M.; Yamada, T.; Fujimoto, H.; Iizasa, K.; Ishihara, T. Gravity gradiometer implemented in AUV for detection of seafloor massive sulfides. In Proceedings of the 2012 Oceans, Hampton Roads, VA, USA, 14–19 October 2012. [Google Scholar]
- Dunbabin, M.; Roberts, J.; Usher, K.; Winstanley, G.; Corke, P. A Hybrid AUV Design for Shallow Water Reef Navigation. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 2105–2110, ISBN 0-7803-8914-X. [Google Scholar]
- Eichhorn, M.; Ament, C.; Jacobi, M.; Pfuetzenreuter, T.; Karimanzira, D.; Bley, K.; Boer, M.; Wehde, H. Modular AUV System with Integrated Real-Time Water Quality Analysis. Sensors 2018, 18, 1837. [Google Scholar] [CrossRef]
- Sato, Y.; Maki, T.; Kume, A.; Matsuda, T.; Sakamaki, T.; Ura, T. Path replanning method for an AUV in natural hydrothermal vent fields: Toward 3D imaging of a hydrothermal chimney. Mar. Technol. Soc. J. 2014, 48, 104–114. [Google Scholar] [CrossRef]
- Jaulin, L. A nonlinear set membership approach for the localization and map building of underwater robots. IEEE Trans. Robot. 2009, 25, 88–98. [Google Scholar] [CrossRef]
- Maki, T.; Sato, Y.; Matsuda, T.; Shiroku, R.-T.; Sakamaki, T. AUV Tri-TON 2: An intelligent platform for detailed survey of hydrothermal vent fields. In Proceedings of the 2014 IEEE/OES Autonomous Underwater Vehicles (AUV), Oxford, MS, USA, 6–9 October 2014; pp. 1–5, ISBN 978-1-4799-4344-9. [Google Scholar]
- Pyo, J.; Cho, H.; Joe, H.; Ura, T.; Yu, S.C. Development of hovering type AUV “Cyclops” and its performance evaluation using image mosaicing. Ocean Eng. 2015, 109, 517–530. [Google Scholar] [CrossRef]
- Carreras, M.; Hernández, J.D.; Vidal, E.; Palomeras, N.; Ribas, D.; Ridao, P. Sparus II AUV—A Hovering Vehicle for Seabed Inspection. IEEE J. Ocean. Eng. 2018, 43, 344–355. [Google Scholar] [CrossRef]
- Farrell, J.A.; Pang, S.; Li, W.; Arrieta, R.M. Biologically inspired chemical plume tracing demonstrated on an autonomous underwater vehicle. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics, Hague, The Netherlands, 10–13 October 2004. [Google Scholar]
- Yildiz, Ö.; Gökalp, R.B.; Yilmaz, A.E. A review on motion control of the underwater vehicles. In Proceedings of the 2009 International Conference on Electrical and Electronics Engineering-ELECO 2009, Bursa, Turkey, 5–8 November 2009. [Google Scholar]
- Jun, S.W.; Lee, H.J. Design of TS fuzzy-model-based controller for depth control of autonomous underwater vehicles with parametric uncertainties. In Proceedings of the 2011 11th International Conference on Control, Automation and Systems, Gyeonggi-do, Korea, 26–29 October 2011. [Google Scholar]
- Dahmani, H.; Chadli, M.; Rabhi, A.; El Hajjaji, A. Road curvature estimation for vehicle lane departure detection using a robust Takagi–Sugeno fuzzy observer. Veh. Syst. Dyn. 2013, 51, 581–599. [Google Scholar] [CrossRef]
- Medagoda, L.; Williams, S.B. Model predictive control of an autonomous underwater vehicle in an in situ estimated water current profile. In Proceedings of the 2012 Oceans-Yeosu, Yeosu, Korea, 21–24 May 2012. [Google Scholar]
- Steenson, L.V. Experimentally Verified Model Predictive Control of a Hover-Capable AUV. Ph.D. Thesis, University of Southampton, Southampton, UK, 2013. [Google Scholar]
- Zeinali, M.; Notash, L. Adaptive sliding mode control with uncertainty estimator for robot manipulators. Mech. Mach. Theory 2010, 45, 80–90. [Google Scholar] [CrossRef]
- Kumar, N.; Panwar, V.; Sukavanam, N.; Sharma, S.P.; Borm, J.-H. Neural network-based nonlinear tracking control of kinematically redundant robot manipulators. Math. Comput. Model. 2011, 53, 1889–1901. [Google Scholar] [CrossRef]
- Fallaha, C.J.; Saad, M.; Kanaan, H.Y.; Al-Haddad, K. Sliding-Mode Robot Control with Exponential Reaching Law. IEEE Trans. Ind. Electron. 2011, 58, 600–610. [Google Scholar] [CrossRef]
- Feng, Y.; Zhou, M.; Han, F.; Yu, X. Speed Control of Induction Motor Servo Drives Using Terminal Sliding-Mode Controller. In Advances in Variable Structure Systems and Sliding Mode Control—Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2018; pp. 341–356. [Google Scholar]
- Yang, L.; Yang, J. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. Int. J. Robust Nonlinear Control 2011, 21, 1865–1879. [Google Scholar] [CrossRef]
- Brahmi, B.; Laraki, M.H.; Brahmi, A.; Saad, M.; Rahman, M.H. Improvement of sliding mode controller by using a new adaptive reaching law: Theory and experiment. ISA Trans. 2019. [Google Scholar] [CrossRef]
- Liu, J.; Yu, H.; Xu, Y. Improved S Plane Control Algorithm for Underwater Vehicles. J. Harbin Eng. Univ. 2002, 23, 33–36. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011; ISBN 1119991498. [Google Scholar]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV Navigation and Localization: A Review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Zhang, G.-C.; Huang, H.; Qin, H.-D.; Wan, L.; Li, Y.-M.; Cao, J.; Su, Y.-M. A novel adaptive second order sliding mode path following control for a portable AUV. Ocean Eng. 2018, 151, 82–92. [Google Scholar] [CrossRef]
- Liang, X.; Wan, L.; Blake, J.I.; Shenoi, R.A.; Townsend, N. Path following of an Underactuated AUV Based on Fuzzy Backstepping Sliding Mode Control. Int. J. Adv. Robot. Syst. 2016, 13, 122. [Google Scholar] [CrossRef] [Green Version]
- Wang, N.; Sun, Z.; Zheng, Z.; Zhao, H. Finite-Time Sideslip Observer-Based Adaptive Fuzzy Path-Following Control of Underactuated Marine Vehicles with Time-Varying Large Sideslip. Int. J. Fuzzy Syst. 2018, 20, 1767–1778. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length | 96 kg |
| Width | 0.5 m |
| Maximum Diameter | 0.28 m |
| Height | 0.47 m |
| Maximum Depth | 100 m |
| Cruising Speed | 4 km |
| Actuators | two horizontal thrusters, four vertical thrusters |
| Communication Equipment | BeiDou+GPS, radio, Wi-Fi |
| Sensors | TCM5, depth sensor, DVL, water quality sensor, ADCP |
| Sensors | Items | Accuracy |
|---|---|---|
| TCM5 | Heading accuracy | 0.3° |
| Pitch-and-roll accuracy | 0.2° | |
| DVL | Maximum velocity | ±20 knots |
| Velocity accuracy | 0.2% ± 1 mm/s | |
| Depth sensor | Accuracy | ±0.01% FS |
| Water quality sensor | Temperature accuracy | ±0.05 °C |
| Conductivity accuracy | ±0.05 ms/cm | |
| Salinity accuracy | ±0.05 ppt | |
| Dissolved oxygen accuracy | ±0.5% | |
| Turbidity accuracy | ±0.5 ntu(0–300ntu) ±5 ntu(300–600ntu) | |
| pH accuracy | ±0.03 |
| DOF | Forces and Moments | Linear and Angular Velocities | Positions and Euler Angles |
|---|---|---|---|
| Surge | X | u | x |
| Sway | Y | v | y |
| Heave | Z | w | z |
| Roll | K | p | |
| Pitch | M | q | |
| yaw | N | r |
| k1 | k2 | ||
|---|---|---|---|
| Surge velocity control | 0.6 | 0.2 | |
| Heading control | 0.05 | 0.1 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, H.; Zhang, G.-C.; Sun, Y.-S.; Pang, S.; Ran, X.-R.; Wang, X.-B. Design and Experiment of a Plateau Data-Gathering AUV. J. Mar. Sci. Eng. 2019, 7, 376. https://doi.org/10.3390/jmse7100376
Xu H, Zhang G-C, Sun Y-S, Pang S, Ran X-R, Wang X-B. Design and Experiment of a Plateau Data-Gathering AUV. Journal of Marine Science and Engineering. 2019; 7(10):376. https://doi.org/10.3390/jmse7100376
Chicago/Turabian StyleXu, Hao, Guo-Cheng Zhang, Yu-Shan Sun, Shuo Pang, Xiang-Rui Ran, and Xiang-Bin Wang. 2019. "Design and Experiment of a Plateau Data-Gathering AUV" Journal of Marine Science and Engineering 7, no. 10: 376. https://doi.org/10.3390/jmse7100376
APA StyleXu, H., Zhang, G.-C., Sun, Y.-S., Pang, S., Ran, X.-R., & Wang, X.-B. (2019). Design and Experiment of a Plateau Data-Gathering AUV. Journal of Marine Science and Engineering, 7(10), 376. https://doi.org/10.3390/jmse7100376