1. Introduction
Oil spill accidents represent a major threat to marine and coastal environment, impacting both biological species and human health, as well as economic, touristic and commercial activities. For example, according to data collected from 1977 to 2003 about 304,700 tons of oil have been released in the Mediterranean Sea mainly due to extensive marine traffic of oil tankers and ships [
1,
2].
Weather conditions, oil physical and chemical characteristics determine oil fate and persistence at sea. Most kinds of oils spread on the sea surface as a thin film, the slick is then driven by the sea currents and wind stress; furthermore, if the oil temperature drops below the pour-point, oil can solidify and form tar balls. In case of wavy and turbulent seas, small oil drops can detach from the oil slick and then, depending on their density, particles can either sink, float on the surface or be transported along the water column. Moreover, oil interacts with the surrounding environment. Immediately after spills, oil can evaporate and, under the action of wind and waves, it can absorb water droplets producing emulsion. Such phenomena, called weathering processes, change oil physical and chemical properties in time, strongly affecting oil fate and persistence at sea [
3,
4,
5,
6].
Given the significant impact of oil spill on the environment and economy of the area, over the years, efforts have been devoted to the preparation of contingency plans, aimed at ensuring fast response and to facilitate clean-up operations after accidents. In this context, oil spill numerical models have been widely established as helpful tools, both for development of contingency plans and for guiding clean-up operations. Oil slick models are usually integrated with hydrodynamic and meteorological models that provide sea currents and wind data. The modeling approaches can be classified as Lagrangian, Eulerian and Lagrangian/Eulerian hybrid models [
4,
7]. In the Lagrangian models, e.g., [
2], oil slick is treated as a multitude of finite size particles, which are advected by a mean drift velocity plus a fluctuating turbulent component, the latter usually parametrized by means of a random walk technique. In the Eulerian method, e.g., [
8], oil slick dynamics are derived from mass and momentum conservation equations. Finally, in hybrid Lagrangian/Eulerian models (see, for example [
9]), a large number of particles parametrizes the oil slick immediately after the spill, and, as far as the width of the slick reaches a terminal value, the computation switches to a Eulerian model.
In the present paper, we study the case of a hypothetical oil spill accident due to ship collision in Boka Kotorska Bay, a long and tortuous fjord situated in the Adriatic Sea. The study is aimed at preparation of contingency plans for the area under investigation. This area is under the UNESCO protection since 1979, for its own important natural and historical heritage. The prevention from possible hazardous situations is becoming urgent in light of the increased maritime traffic over the recent years. To make the study as realistic as possible, the typical ship path is considered within the bay [
10,
11] in conjunction with oil spill spots identified as dangerous from an environmental point of view.
We use a novel approach to simulate oil slick dispersion in coastal areas characterized by surface currents and low atmosphere circulations governed by complex bathymetry, coastline and orography. We use a two-dimensional Eulerian model derived by Nihoul’s theory [
12,
13,
14] for the oil slick. The oil slick simulation is coupled with LESCOAST [
15,
16], a high resolution hydrodynamic model used to simulate water circulation in coastal areas. Given the complex orography surrounding the bay, a preliminary low-atmosphere wind simulation is required to take into account the horizontal variability of wind stress. This latter is the main forcing item driving both the oil slick and the sea current in the upper layers, and it has to be properly modeled, for example as suggested in [
17].
The paper is organized as follows: in
Section 2, we provide a brief overview of the hydrodynamic models for water and air domains; then, we introduce the oil spill model and finally we briefly describe the features of the area under investigation along with the boundary and initial condition for the simulations. Results of the most significant scenarios are reported and examined in
Section 3. Finally, the discussion is provided in
Section 4.
2. Materials and Methods
In this section, we describe the methodology used for the study: in
Section 2.1, we provide a brief description of the LESCOAST/LESAIR model used for the marine and low-atmosphere simulations; in
Section 2.2, we present the oil spill model for the analysis of pollutant dispersion; in
Section 2.3, we give a description of the Boka Kotorska Bay; in
Section 2.4, we discuss the set-up of the simulations.
2.1. Hydrodynamical Model
LESCOAST/LESAIR model [
18,
19] solves the filtered form of three-dimensional, non-hydrostatic Navier–Stokes equations under the Boussinesq approximation along with the transport equations for scalar quantities, i.e., salinity and temperature/humidity and temperature in marine/atmosphere simulations, respectively.
The LESCOAST/LESAIR model uses a Large Eddy Simulation approach to parametrize turbulence, and the variables are filtered by a low-pass filter function represented by the size of the cells. The subgrid-scale fluxes (SGS), which come out from the filtering operation, are parametrized by a two-eddy viscosity anisotropic Smagorinsky model developed in [
18]. Such method is effective in simulating coastal flows on sheet-like anisotropic computational grids.
The complex geometry, which usually characterizes harbor and coastal areas, is treated using an Immersed Boundary Method (IBM), based on a direct forcing approach, as described in [
20]; the technique is used to reproduce coastline, anthropogenic structures, bathymetry and topography.
The filtered Boussinesq form of the Cartesian Navier–Stokes equations reads as follows:
Scalar transport equation:
where ’−’ represents the filtering operation,
represents the
ith-component of the Cartesian velocity vector
,
represents the
ith-component of the Cartesian coordinates
,
t is time,
is the reference density,
is the hydrodynamic pressure,
is the kinematic viscosity,
is the Levi–Civita tensor,
is the
ith-component of the Earth rotation vector,
is the density anomaly,
is the
ith-component of the gravity vector, and
is the SGS stress tensor which comes from the nonlinearity of the advective term,
is a scalar quantity (e.g., temperature and salinity/humidity),
is scalar diffusivity and
is the SGS scalar flux.
In the present low-atmosphere simulations, density variations are small and therefore buoyancy effects are neglected. In the marine simulations, we solve the transport equation of the scalar quantities, temperature
T and salinity
S, respectively. The fluid density is computed through the state equation:
where
is the reference density at the temperature
and salinity
;
and
are respectively the coefficient of temperature expansion and haline contraction.
At immersed boundaries, we apply the wall-layer model (IBWLM) presented in [
21]; and at the open boundaries the Orlanski boundary condition is enforced [
22], and it reads as:
where
is the phase velocity, calculated as the flux at the cell face.
The effect of the wind imposed over the free surface is taken into account by means of the formula proposed in [
23]. It calculates the stress at the sea surface as:
where
is the density of air and
is the drag coefficient which is a function of wind speed as:
where
is the wind velocity 10 m above the mean sea level, which is provided by the low-atmosphere simulations.
For scalar quantities, we apply a no-flux condition at solid walls and, at the surface; at the open boundaries, the Dirichlet condition is enforced with values interpolated from measured data.
Equations (
1)–(
3) are integrated using the finite difference semi-implicit fractional step method of [
24]; it is second-order accurate in both space and time. The model adopts a non-staggered grid, meaning that the primitive variables, like velocity, pressure and scalars are located at the cell centroids, while the fluxes are defined at the cell faces. More details about the numerical model can be found in [
18]. In [
15], the LESCOAST model is validated against measured and numerical results.
2.2. Oil Spill Model
LESOIL [
13,
25] is a two-dimensional Eulerian numerical model which simulates the main physical processes governing oil behavior at sea from the start of the release for a time period of the order of 24 h. The processes are: transport and spreading under gravity, friction and Coriolis forces, and the short-term weathering processes, namely evaporation and emulsification.
The model, derived from Nihoul’s theory [
12], considers oil slick as a thin-film, whose evolution is driven by gravity and friction forces. The equation that is solved for the thickness of the oil slick
h reads as:
where
v is the transport velocity induced by sea currents and wind stress;
Q is the source/sink term that takes into account a continuous release of oil, or oil loss due to dispersion of particles or evaporation. The term
can be interpreted as the oil slick diffusion coefficient and it depends on gravitational acceleration
g, oil and water densities (respectively
and
). Based on literature findings [
8], the contribution of sea current and wind stress on the transport velocity of oil slick is given by:
where
is the velocity induced by current which is provided at each time step by the LESCOAST model;
is the wind drift factor, set equal to
in agreement with relevant literature [
8,
9,
26,
27,
28];
is supplied by the low-atmosphere simulation.
Immediately after the spill, weathering processes can take place, changing oil density and volume, and eventually influencing oil slick fate and persistence. The model can take into account the main processes, namely evaporation and emulsification, by means of established literature models [
29,
30]. Parametrization of these effects, in Eulerian models, requires an average of quantities, such as wind velocity, over the whole surface/volume of the slick. This approach is suitable for simulating oil slick in an open ocean scenario where wind stress is almost constant, but it is not properly suited for a slick undergoing a highly varying wind-sea current flow conditions. For these reasons, in this study, the weathering processes are not considered. Although this assumption may appear less realistic, it is still reasonable over a time scale of the order of 12 h and it allows for underlining the spreading mechanism due to the combined wind and sea currents’ actions.
In order to facilitate coupling with LESCOAST, the oil model Equation (
8) is run on a surface mesh that perfectly matches the horizontal discretization of the first cells layer at the free surface of the marine model. We use a second-order Adams–Bashfort scheme to integrate numerically Equation (
8), the diffusion terms are treated using a centered second-order finite differences method, while the advective terms are discretized using SMART, a third order accurate, monotonic scheme [
31]. Compared to literature results [
8], the method is proved to be accurate without appreciable numerical diffusion [
13,
25]. At the immersed bodies, we apply a no-flux condition, neglecting the phenomenon of oil deposition over coastlines.
2.3. Kotor Bay Area Description
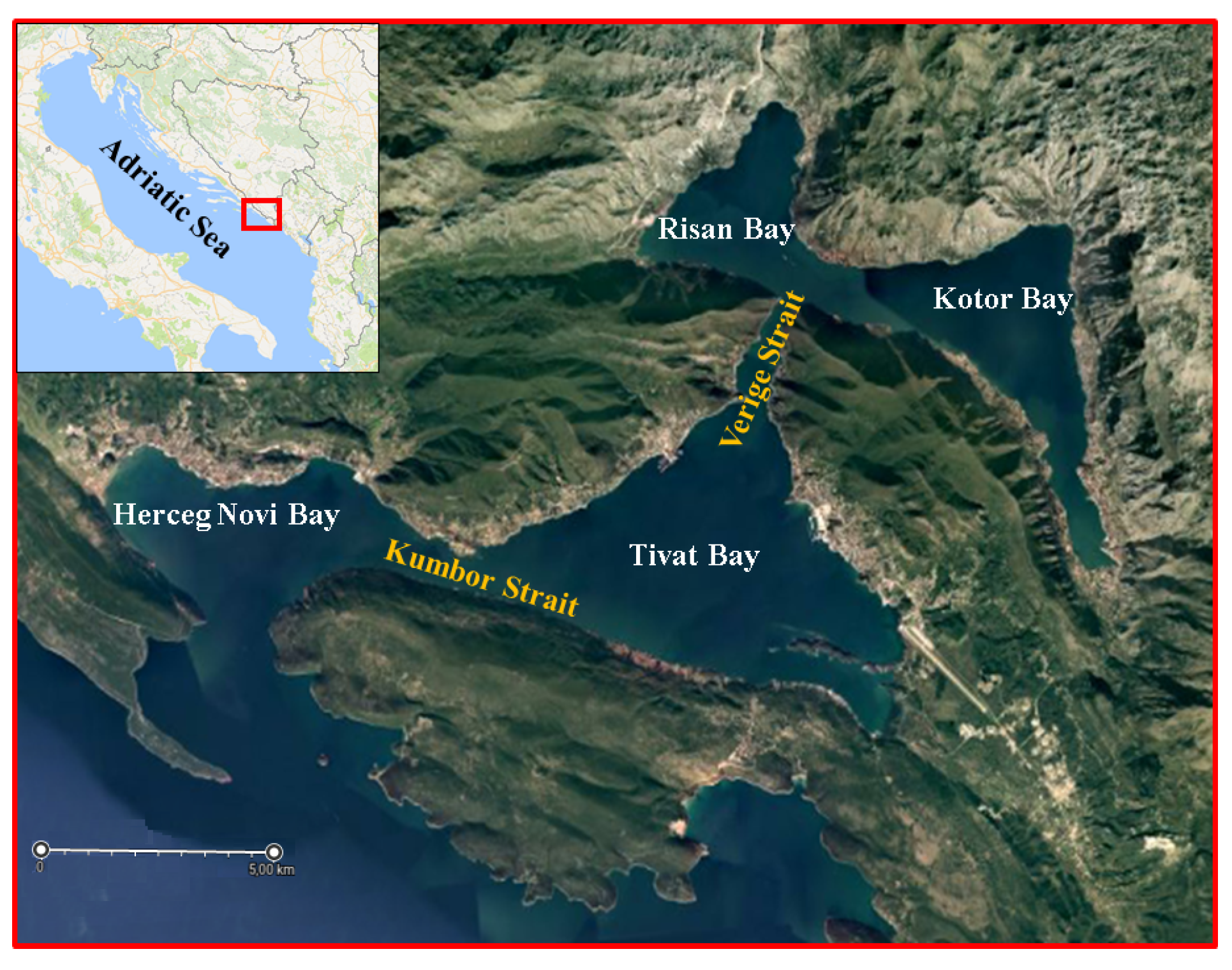
The area under investigation, illustrated in
Figure 1, is Boka Kotorska Bay, or Kotor Bay, a semi-enclosed karstic basin situated in the southeastern side of the Adriatic Sea (Montenegro). The bay covers an area of about 87 km
. The fjord consists of three different sub-bays: Kotor-Risan Bay, Tivat Bay and Hergeg-Novi Bay. The inner one, Kotor-Risan Bay, is further divided into two smaller basins: Kotor Bay (southeast) and Risan Bay (northwest). Two straits connect the three bays: the Kumbor Strait links Tivat Bay with Herceg-Novi Bay, and a narrow canyon, Verige Strait, connects Tivat with Kotor-Risan Bay. The bathymetry decreases rapidly up to a depth of 40 m in the largest part of the basin, the average depth and the maximum depth are 27.3 m and 60 m, respectively. The largest and narrowest widths of the bay are respectively 7 km and 0.3 km [
32,
33,
34].
Numerous fresh water inputs characterize the bay, such as submarine springs, precipitations and rivers. In the upper layers, the water circulation is driven mainly by wind, tide, river runoff, and density gradients; denser water from the Adriatic Sea flows into the bay in the bottom layer. The fresh water inflow mainly impacts the inner bay and, as a matter of fact, salinity at the sea surface increases moving from Kotor-Risan Bay towards the outer basin. In the winter season, characterized by higher precipitations and river runoff, the saline vertical stratification can be more pronounced. One of the most frequent wind conditions for this area is Bora, a strong katabatic wind which flows from the first quadrant. Bora is more frequent in winter time, and it can last for 3–7 days [
33,
34]. Because of the mountains surrounding the bay, the fetch is small, preventing the generation of significant waves [
32]; for this reason, we neglect the effect of waves on sea current and oil slick simulations.
2.4. Case Set-Up
The computational domain for sea circulation has overall dimensions of
m,
m, and
m. The computational domain is Cartesian and it is discretized uniformly by
grid cells, respectively, with dimensions of about
m and
m. The coastline, the anthropogenic structures and bathymetry, as well as topography for the low-atmosphere simulation, are reproduced by the IBM [
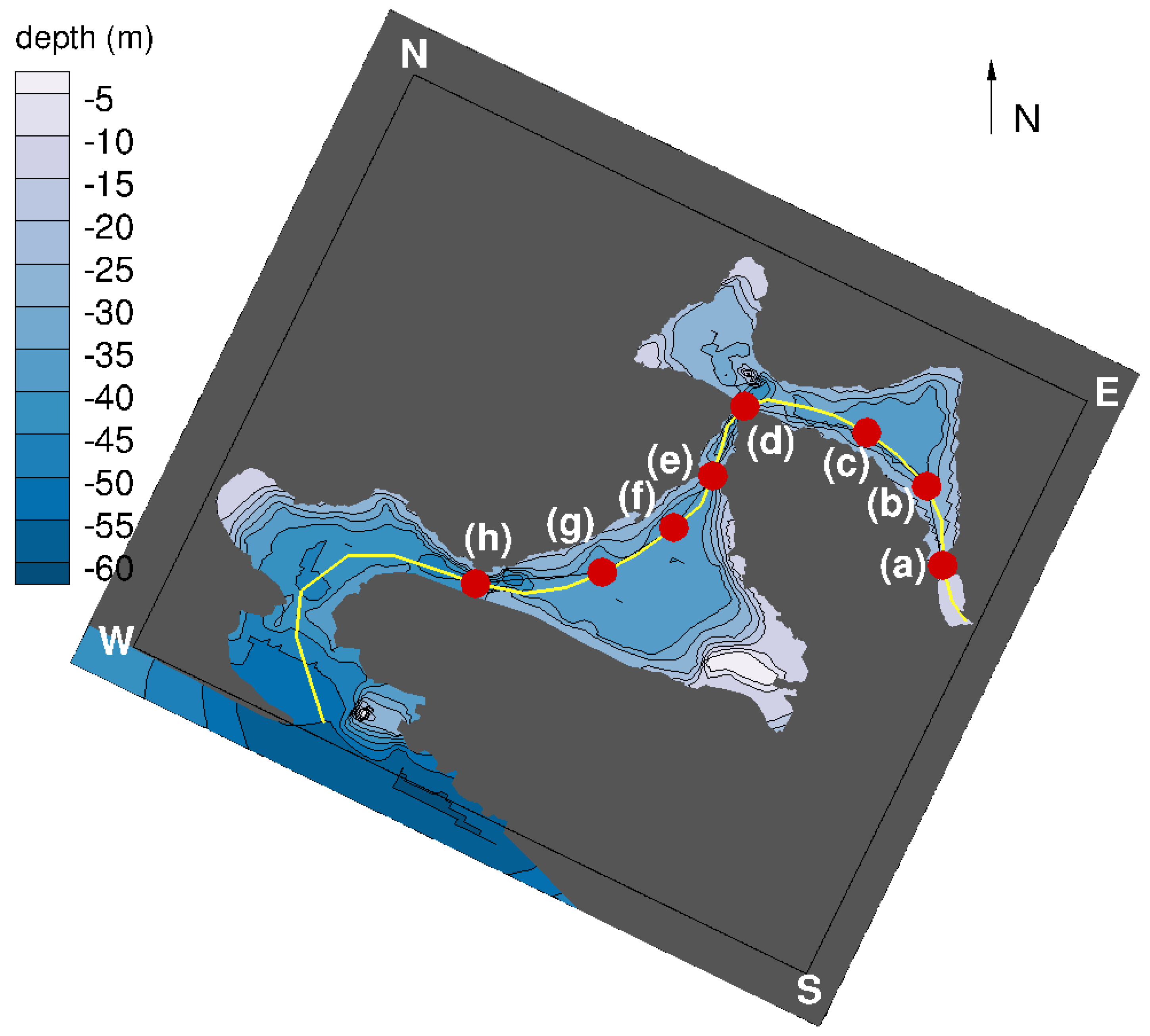
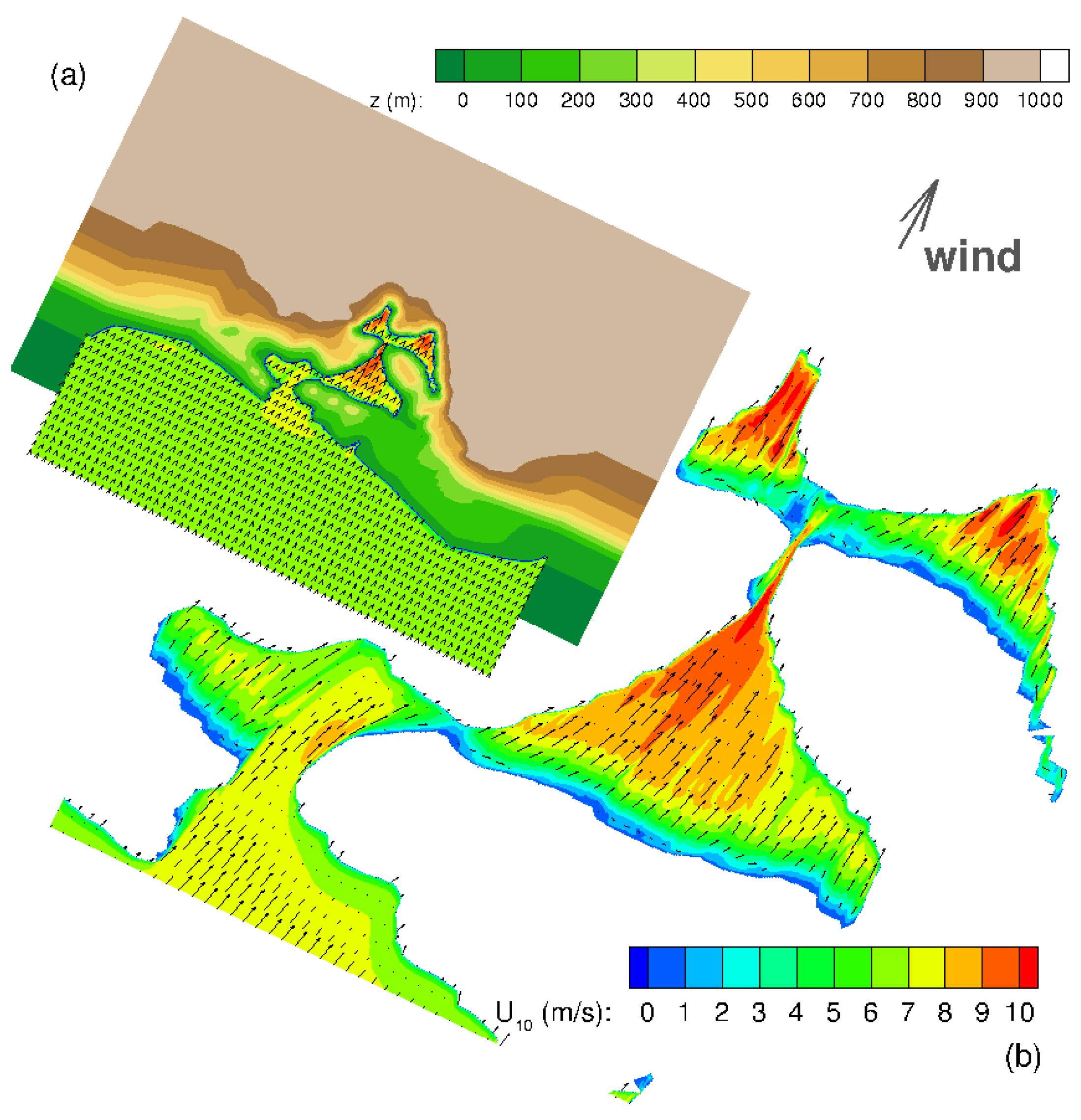
20]. The computational grid is illustrated in
Figure 2; the black rectangle identifies grid borders, and its four corners are labelled with Cardinal points according to grid orientation. The immersed body used to reproduce the coastline is shaded in dark-gray, while the contour colors represent the depth of sea bottom as reproduced in the computational domain. On the southwest side, the basin exchanges water with the Adriatic Sea. Here, we apply the Orlanski boundary condition (Equation (
5), [
22]), which allows for the simulation of the inversion of the currents over the vertical. At the sea surface, currents are forced by wind stress, whose intensity and direction are obtained by LESAIR Simulations (LAS).
For the low-atmosphere, first, a simulation was run on a large and coarse grid (hereafter referred to as LASc); then, the obtained velocity data were nested as initial and boundary conditions of a second simulation on a smaller and finer grid (hereafter labeled as LASf). The height of the domain ( m) is the same for both low-atmosphere grids, and it is discretized by 24 grid cells, stretched in order to obtain a finer resolution near the surface. For LASf, the horizontal domain dimension and discretization are the same as those adopted for the marine domain, while, for the LASc, the horizontal dimensions of the domain are three times larger than in LASf, retaining the same number of grid points.
For the atmosphere simulations, two summer-wind conditions are chosen: the first is the Bora wind case, which is the most frequent wind in the area; the second is the Libeccio (southwest) wind condition. Although it is not the most frequent wind in the area, it is chosen because it represents the worst scenario in case of oil spills, especially in low river runoff conditions. Libeccio, blowing inland from the Adriatic Sea, prevents oil slicks from flowing out of the bay.
The boundary conditions applied for the LASc are: a logarithm inflow velocity with intensity
m/s, set at the wind side (northeast for Bora wind simulation
° and southwest for Libeccio wind simulation
°), named Log Inflow in
Table 1. On the opposite sides, southwest and northeast for Bora and Libeccio cases, respectively, the Orlanski boundary condition is adopted. On the northwest and southeast sides, periodicity is enforced. On the top boundary, we use a free slip condition. On the bottom boundary, at the interface with the sea, a free slip is used, while, at the immersed boundaries surface, a wall model is applied. The LASf boundaries and initial conditions are provided by a nesting procedure, interpolating data from the coarser simulation. Finally, from the computed wind velocity 10 m above the surface, the stress at the free surface of the hydrodynamic model is calculated using Equation (
6). The summary of boundary conditions applied for air and sea simulations is reported in
Table 1.
For the sea simulation, temperature and salinity fields are initialized according to literature field data of Boka Kotorska Bay [
33,
35], while, at the southwest boundary, Copernicus database values [
36] are adopted. Density stratification is principally driven by temperature gradients in Kotor-Risan Bay. In the inner bay, the temperature varies from 24° (C) at the surface to 17° (C) at the bottom, while the salinity varies from 33 (PSU) close to the surface to 36 (PSU) at the bottom. In the other bays, the vertical distribution of the two quantities is almost constant with values approximately of
° (C) and
(PSU).
Oil spill simulations are set considering a ship collision that releases a light oil (CPC-BLEND), with density
= 809 kg/m
and a pour point of −36° (C), low enough to prevent formation of tars. In
Figure 2, the yellow line indicates the ship navigation route as reported in [
10], obtained from [
11]. The accidents are assumed to happen along the path in Verige Strait, the narrowest region of the bay. The red dots in
Figure 2, labeled with letters (a)–(h), indicate the oil release points. The spill rate reproduces a tub emptying process, considering a total amount of spilled oil of
V = 1400 m
, in 4 h.
4. Discussion
In this study, we analyze the dynamics of a hypothetical oil spill accident in the Boka Kotorska Bay, a fjord characterized by a rapidly varying orography, a complex bathymetry and sinuous coastline. A high resolution model is used to reproduce this complex dynamics and to obtain reliable oil slick predictions. In this study, the oil model does not take into account the weathering processes, in order to underline the role played by wind and sea current on the oil fate. Its inclusion will be considered in future works.
As suggested in [
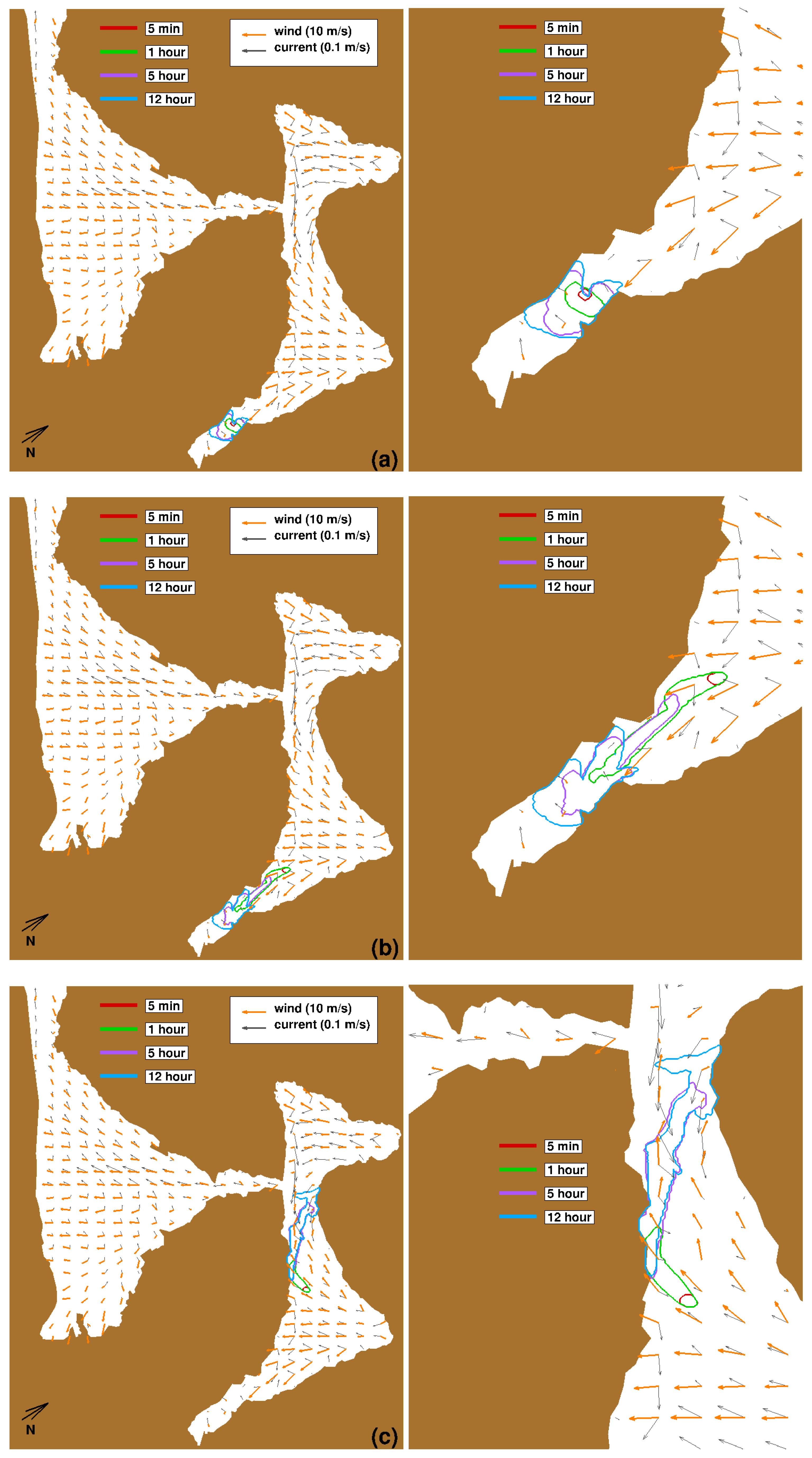
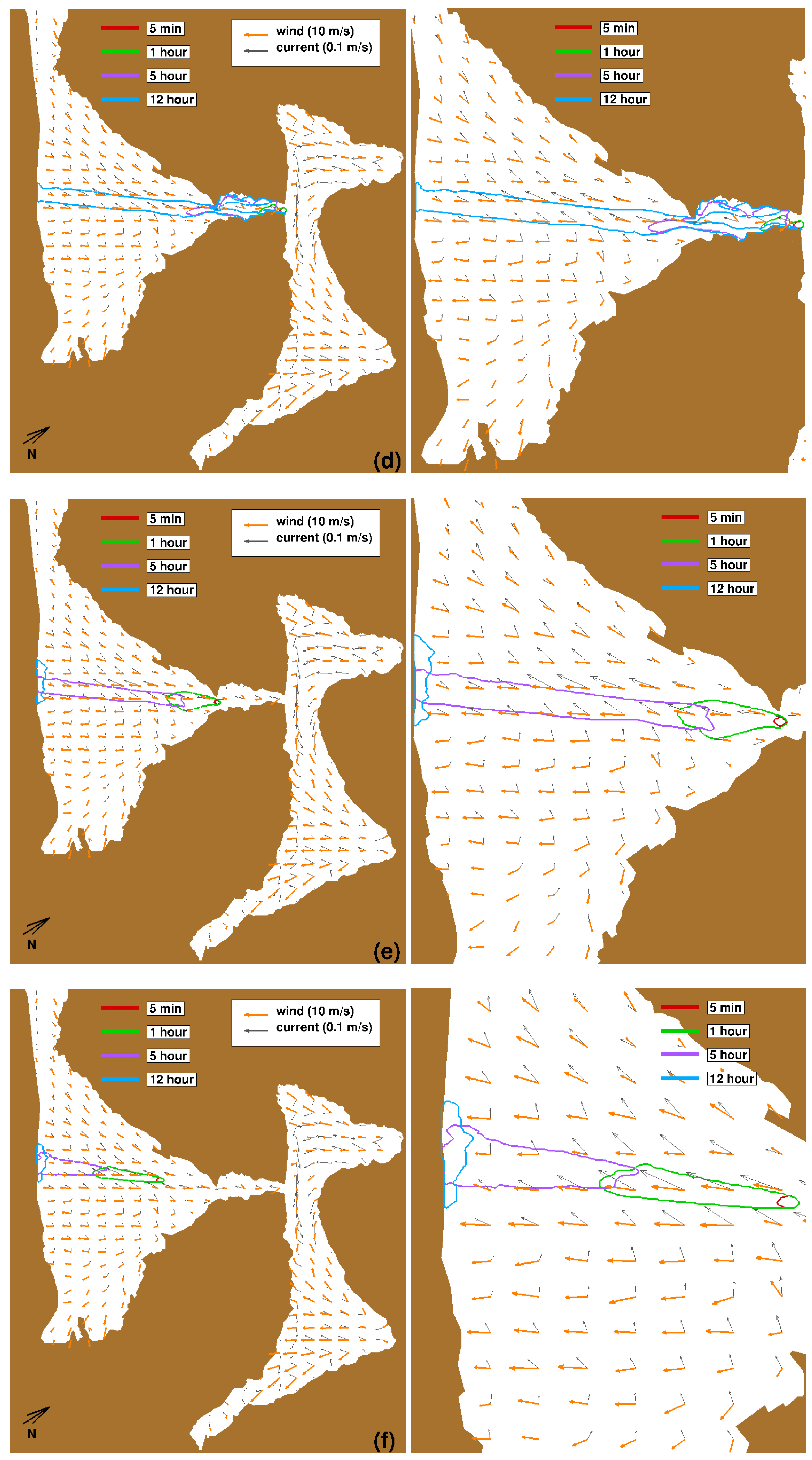
17], the complex orography can affect the horizontal distribution of wind stress in the bay, making it highly inhomogeneous. For this reason, two low-atmosphere simulations are run: LASc uses a large domain with a coarse grid, LASf uses a small domain with a fine grid. The latter provides an accurate distribution of the wind stress, used for both marine and oil simulations. The analysis of low-atmosphere results highlights the presence of zones where wind stress is strong, spots where wind is almost absent or even recirculating in the opposite direction. The wind stress is adopted as surface boundary conditions for marine simulations. We investigate different oil spill scenarios, characterized by different locations of oil release within the bay, along the ship route. We consider two meteorological conditions: Bora wind (NE), which is the most frequent wind in the area; Libeccio wind (SW). We consider a summer situation, in which river runoff is almost absent and river discharge in the bay can be neglected. The absence of river runoff and hence lower outflowing currents turn out to be pejorative since the pollutant remains longer in the bay.
In both cases, we find that oil slick approaches the coastline in few hours and then it spreads along it, constrained by wind forcing and by the alongshore surface sea current. This small time scale underlines the need of contingency plan for this type of situation, allowing for an effective pollutant mitigation action.
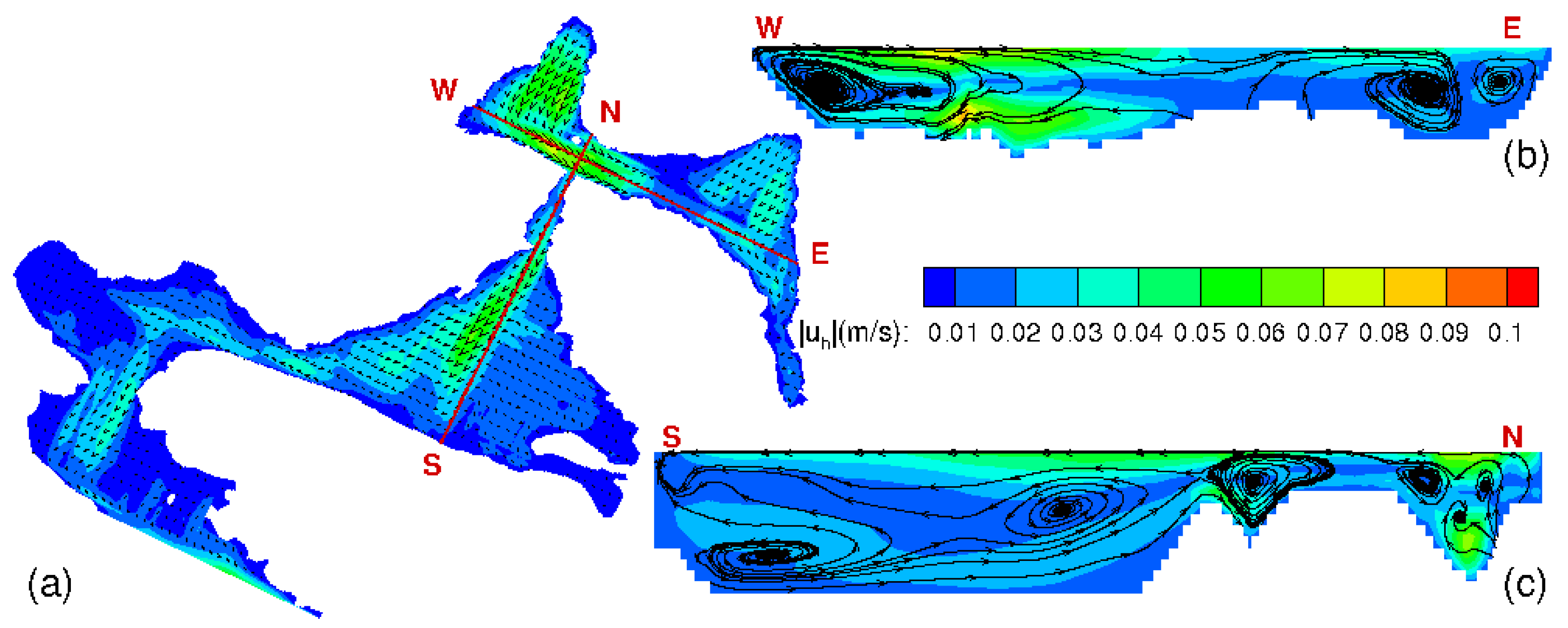
The complex orography has a strong impact on the oil slick because wind flow is influenced by the presence of the mountains. This aspect and its interaction with the coastline generate complex flow patterns at the sea surface, eventually influencing pollutant dispersion.
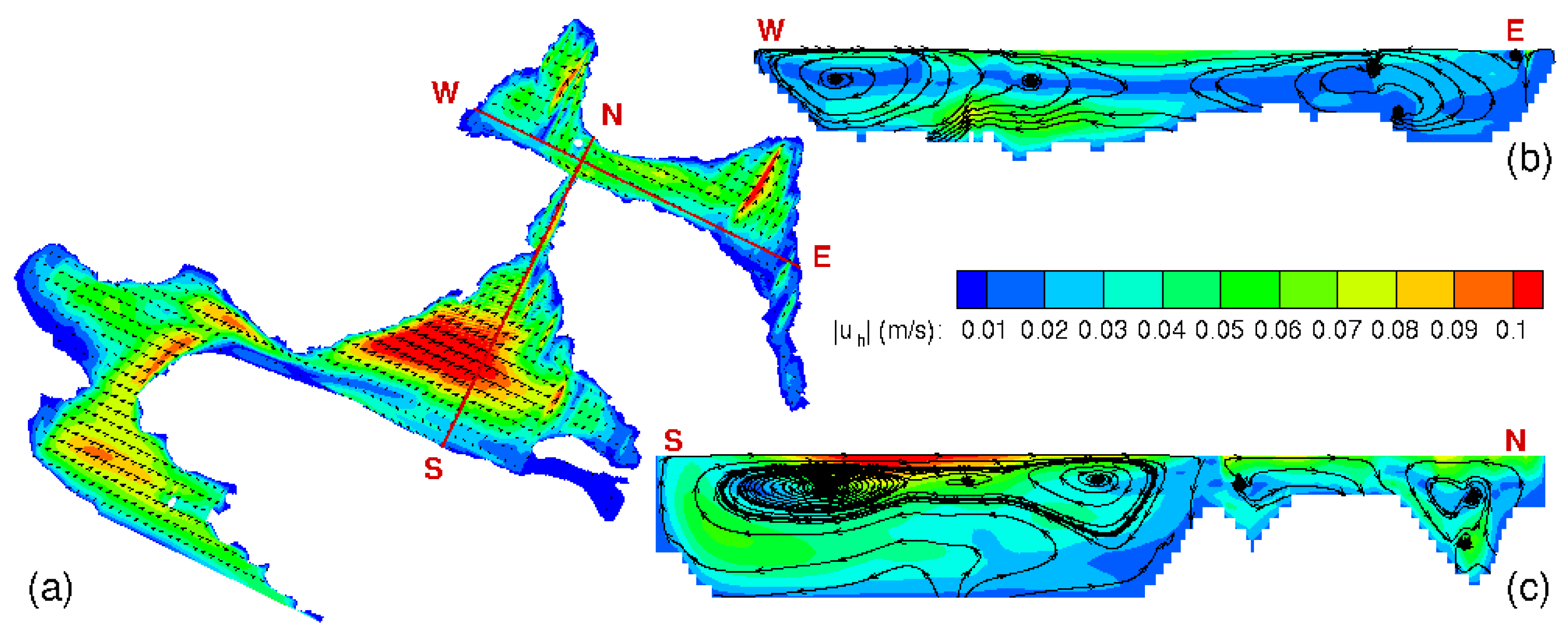
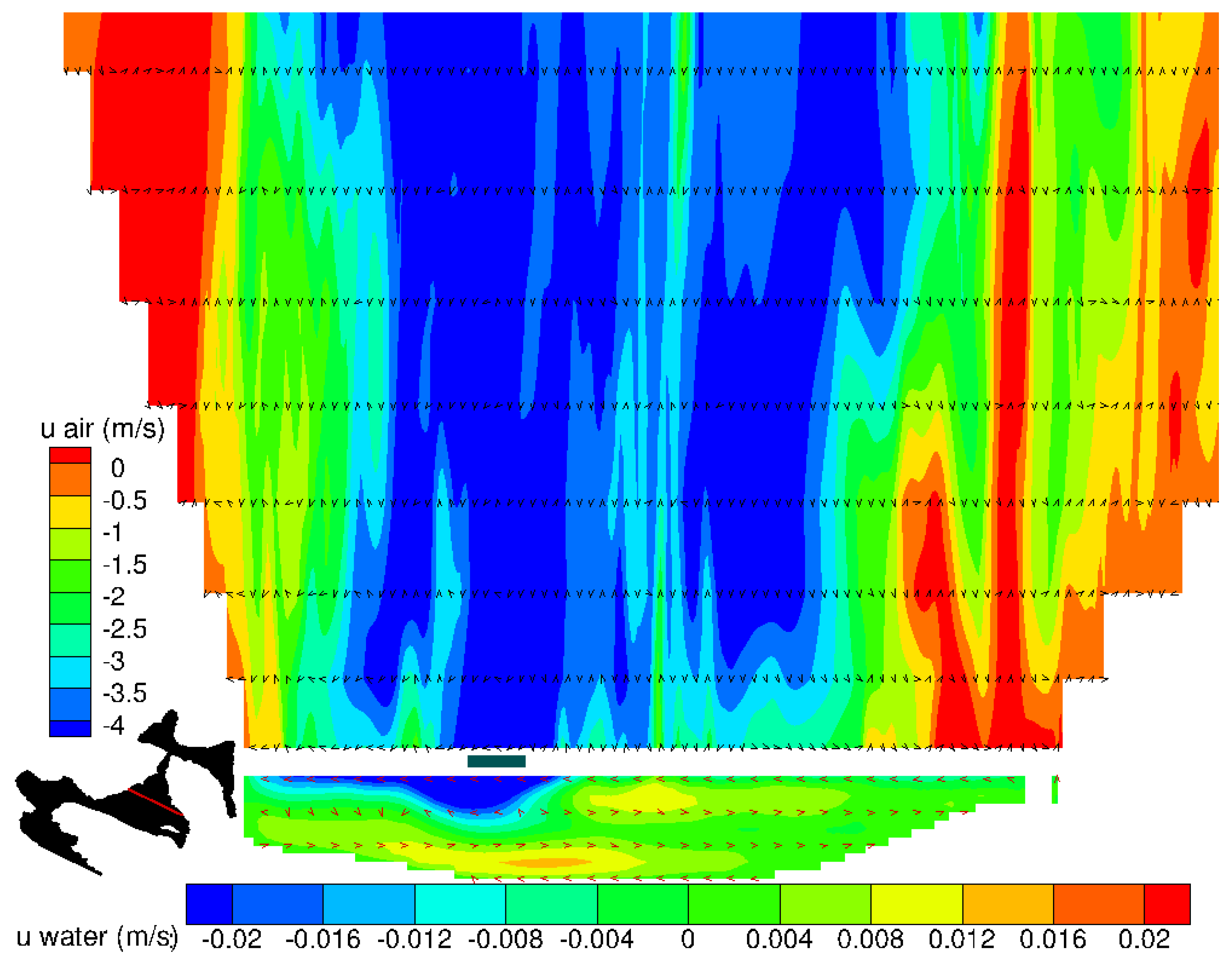
On leeward coastline, because of the mountains, the wind exhibits separation, with low stress regions and recirculations with respect to the wind direction. On the windward coastline, down-welling takes place, but, due to the mountains on the same side, the wind is then forced to blow parallel to the coastline, and the sea current adjusts accordingly. This behaviour is accentuated under strongly stratified water column, since the energy transfer from the wind to the sea, is confined in the upper water layer; this results in an intensification of the horizontal component of the surface current, rather than in an increase of down-welling.
Depending on the wind direction, the gulch between Tivat Bay and Risan-Kotor Bay behaves as a bottleneck (see Libeccio case), where the wind, constrained by converging mountains, accelerates increasing the stress at the sea surface. Moreover, the wind, constrained by lateral and bottom boundaries in the fjord, forms secondary flows characterized by vortexes elongated in the streamwise direction. The resulting stress at the sea surface reduces lateral oil spreading.
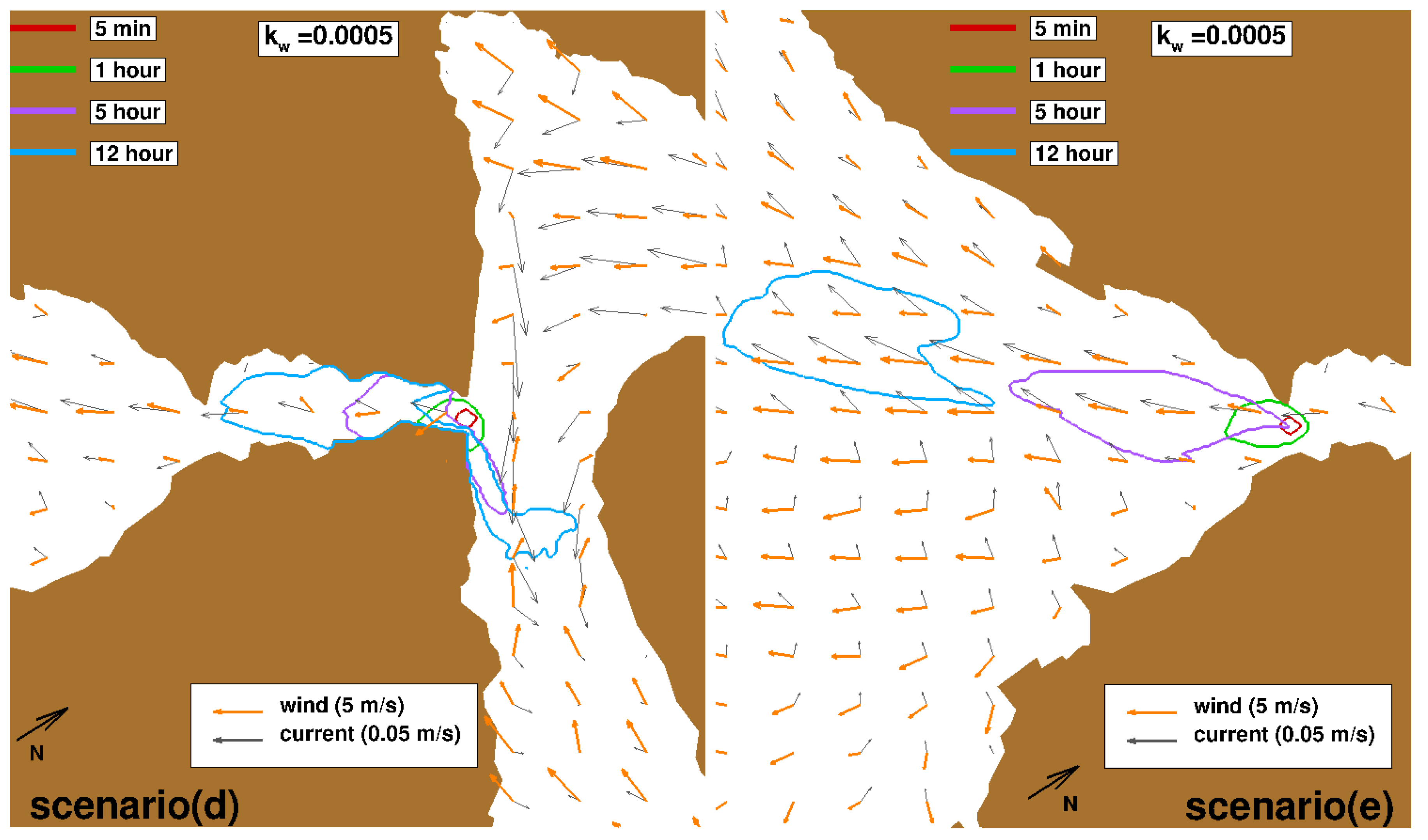
The complex orography and coastline also determine areas where the sea current is opposite to the wind direction. Considering Bora case, scenario (c), such effect is evident and could trigger counterintuitive oil spreading: sea current flows in one direction while the oil spreads on the opposite one. In this kind of analysis, the wind parametrization adopted in the oil model becomes crucial for cases where air and surface water move in opposite directions. As underlined by the numerical simulations, variations in the wind parametrization can bring to completely different spreading scenarios. In this study, we adopted the literature’s widely accepted value and successively, for two spill scenarios, we re-run some cases with a smaller value recently proposed in literature. The differences are significant.
These aspects show the difficulties in the prediction of oil fate in such a complex situation, and that a proper wind pattern representation, together with a robust wind stress parametrization for the oil model, are of crucial importance.
References

 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}