Effects of Principal Stress Rotation on the Fluid-Induced Soil Response in a Porous Seabed




Abstract
:1. Introduction
2. Theoretical Models
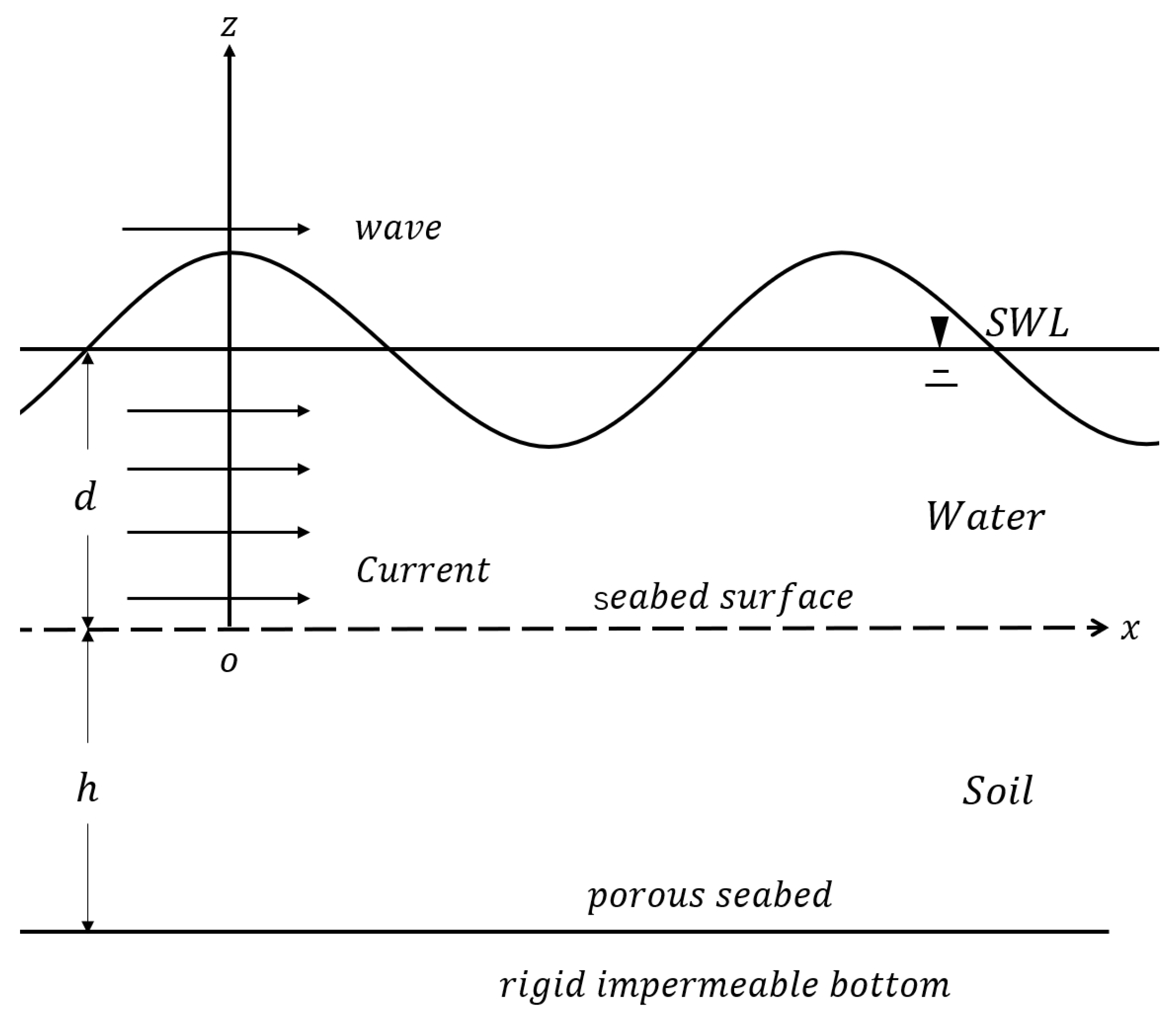
2.1. Flow Model
2.2. Seabed Model
3. Model Verification
3.1. Comparison with Hollow Cylinder Apparatus (HCA) Element Tests
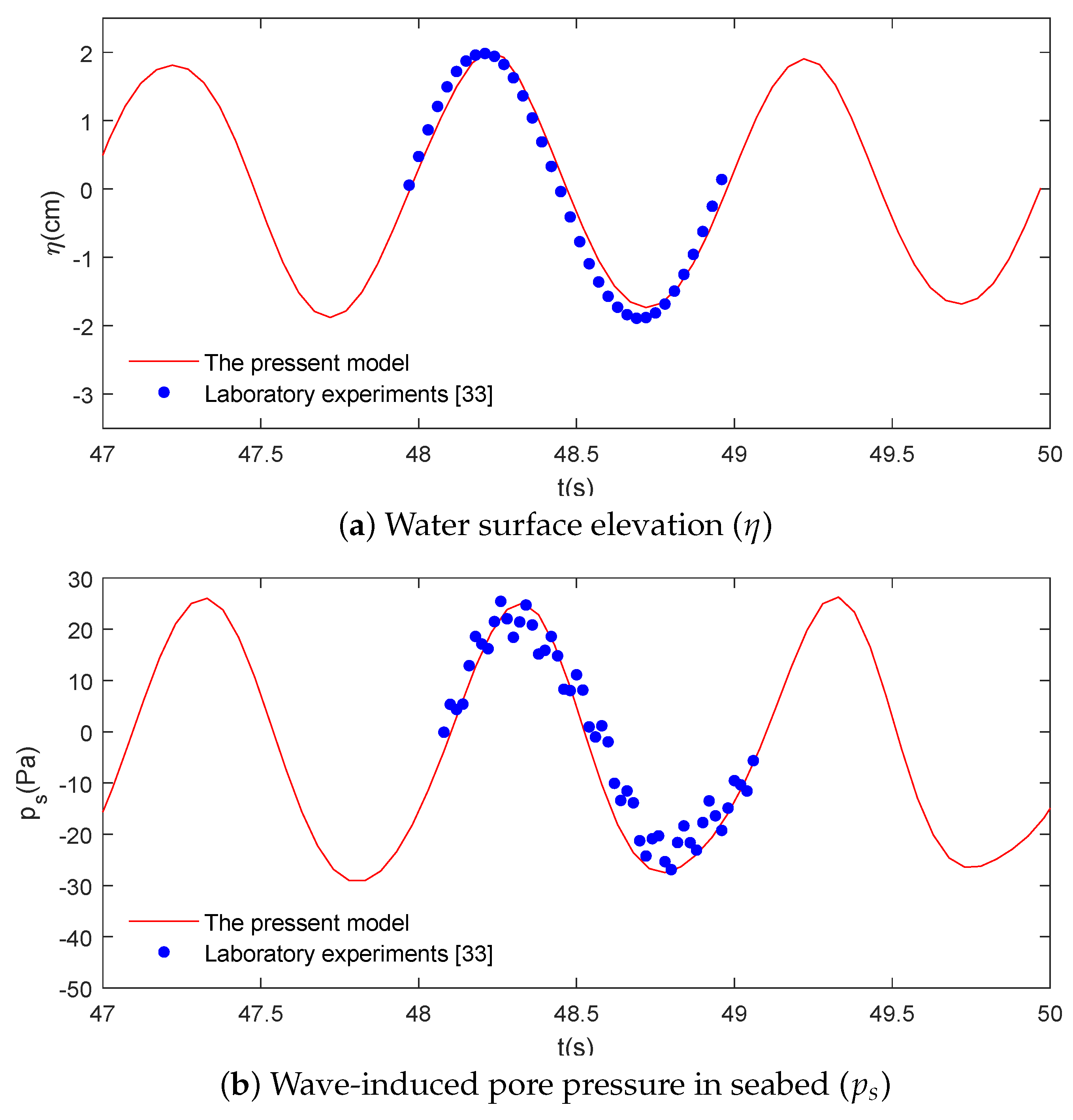
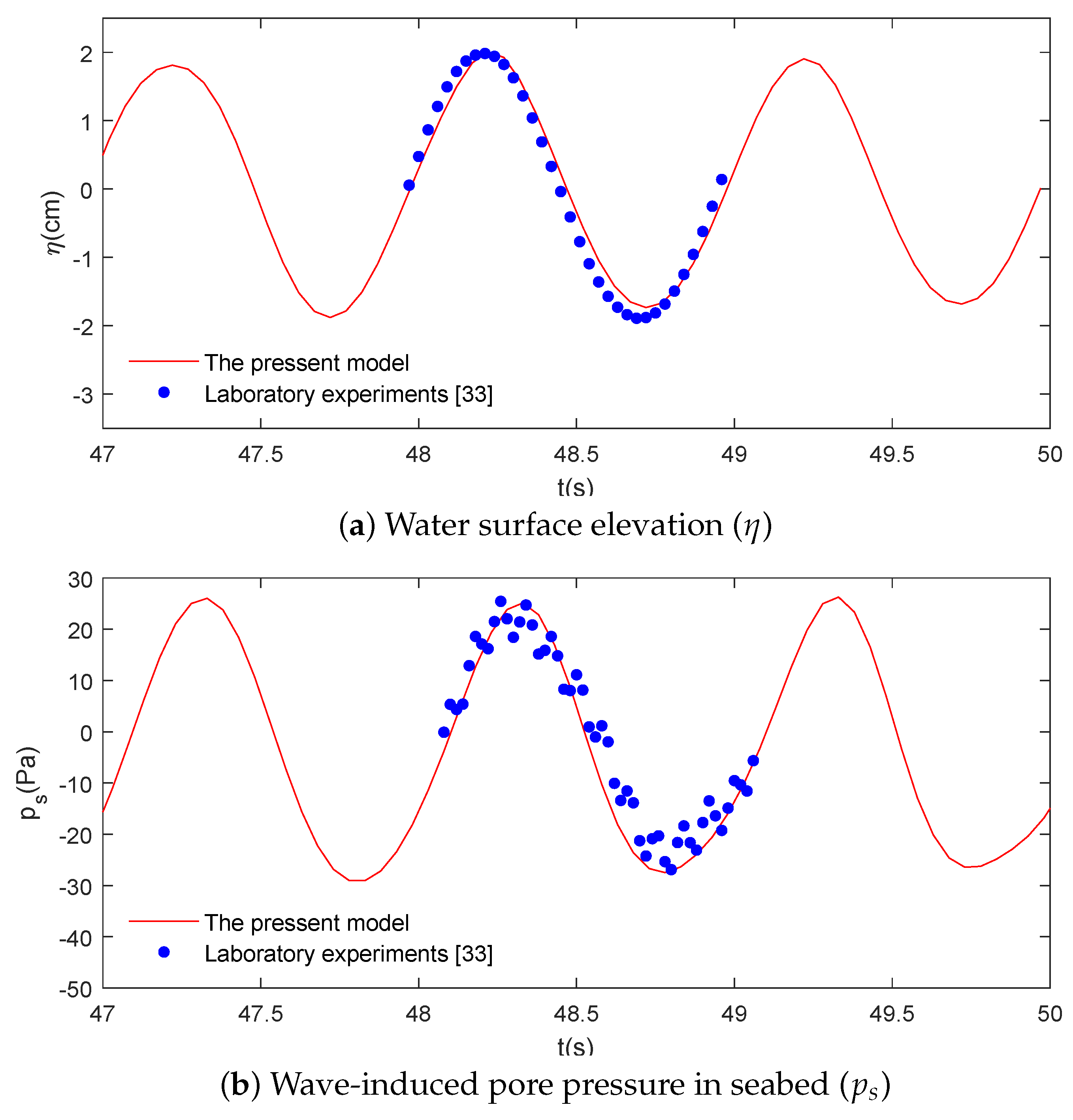
3.2. Comparison with Laboratory Experiments for the Seabed Response to Waves and Currents
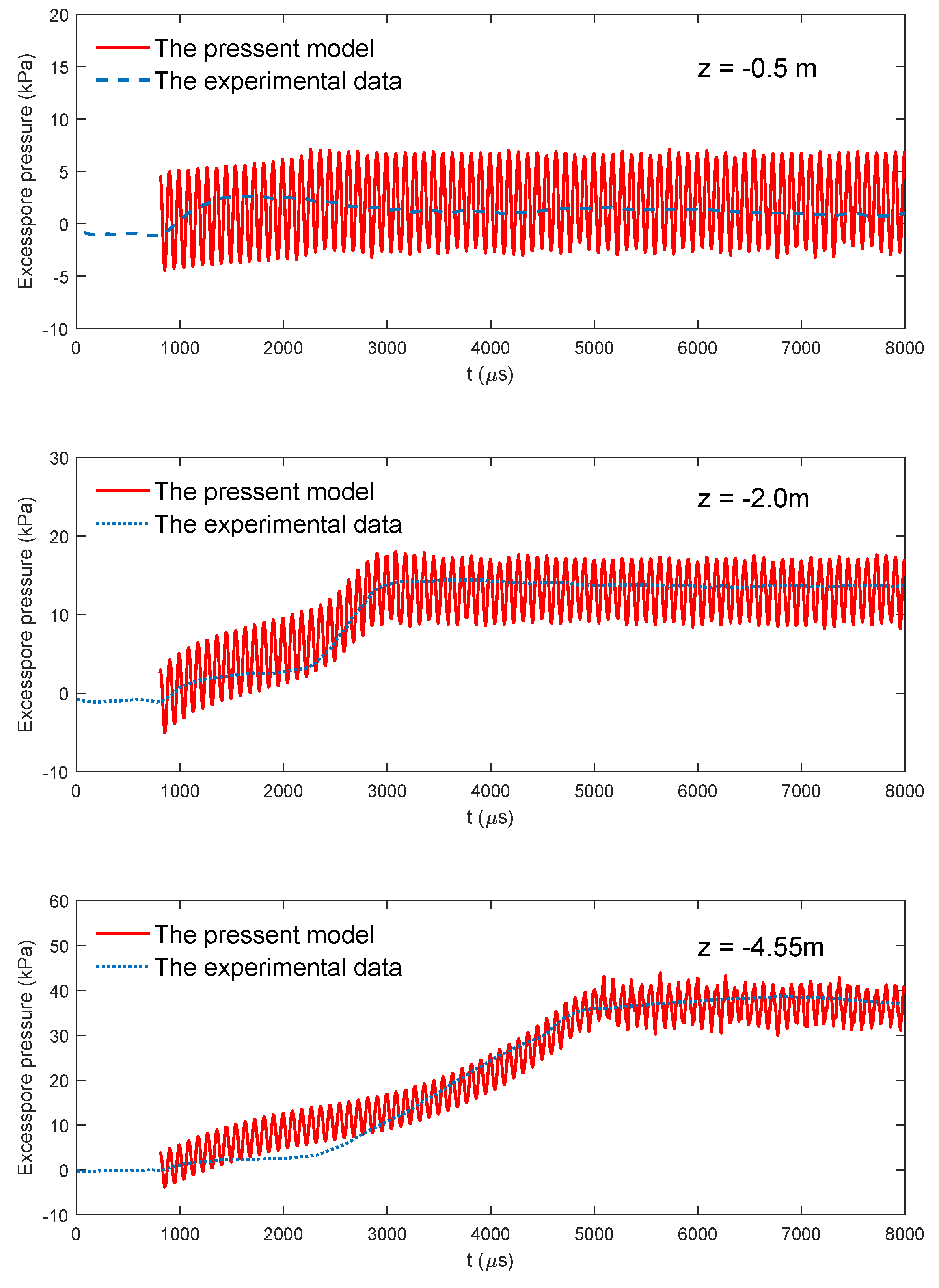
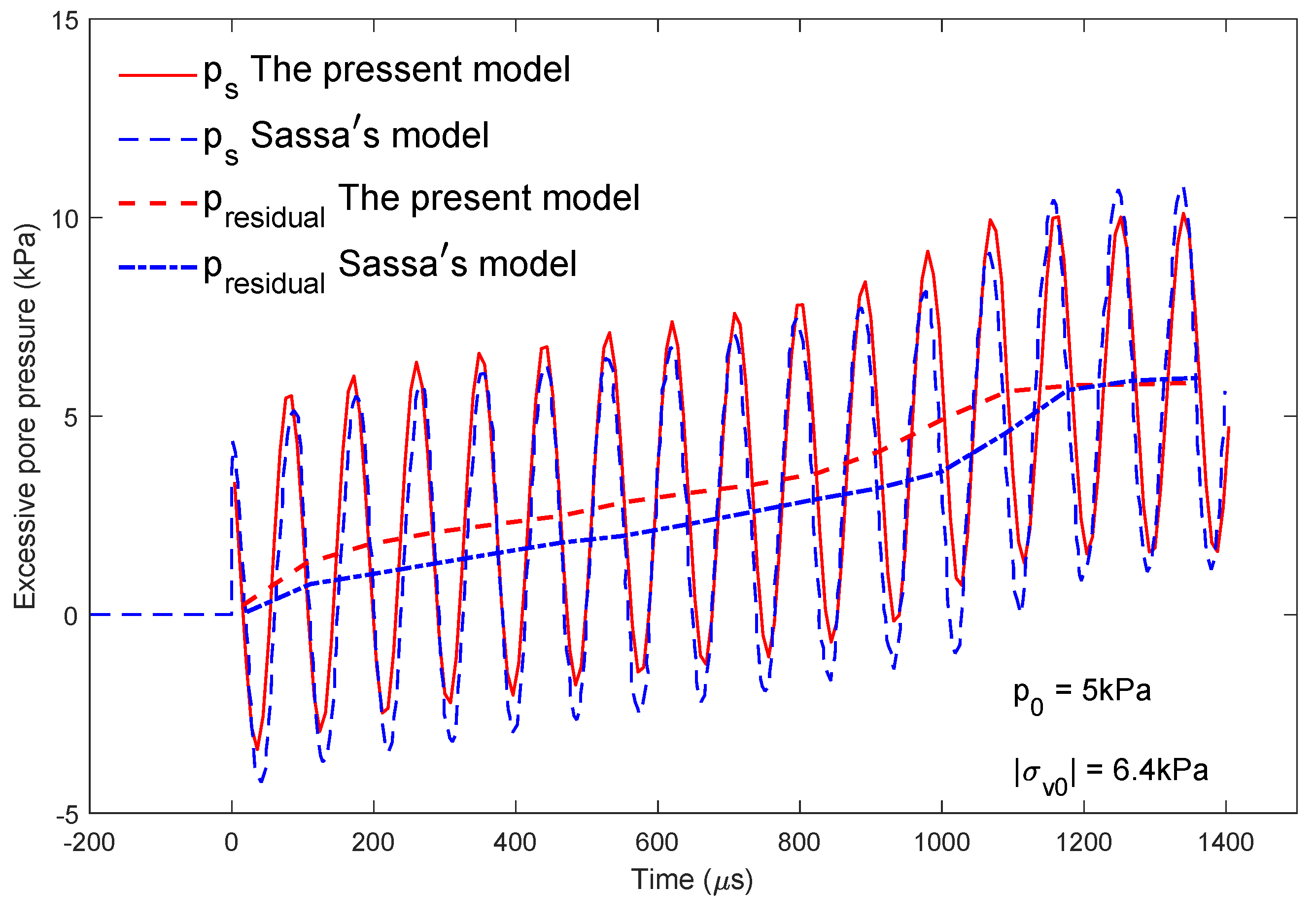
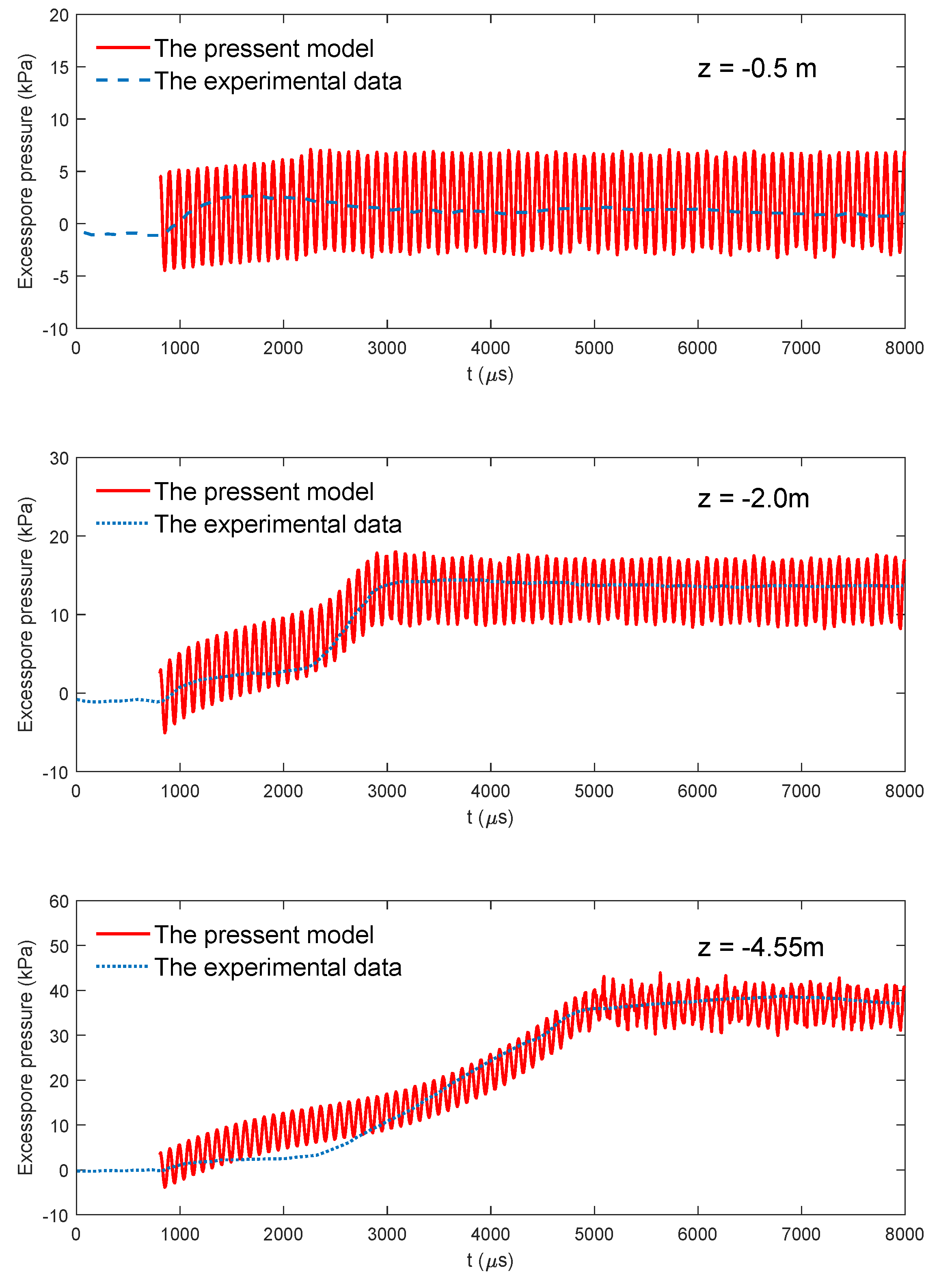
3.3. Comparison with Centrifuge Tests and Previous Numerical Model for the Seabed Response To Waves
4. Results and Discussion
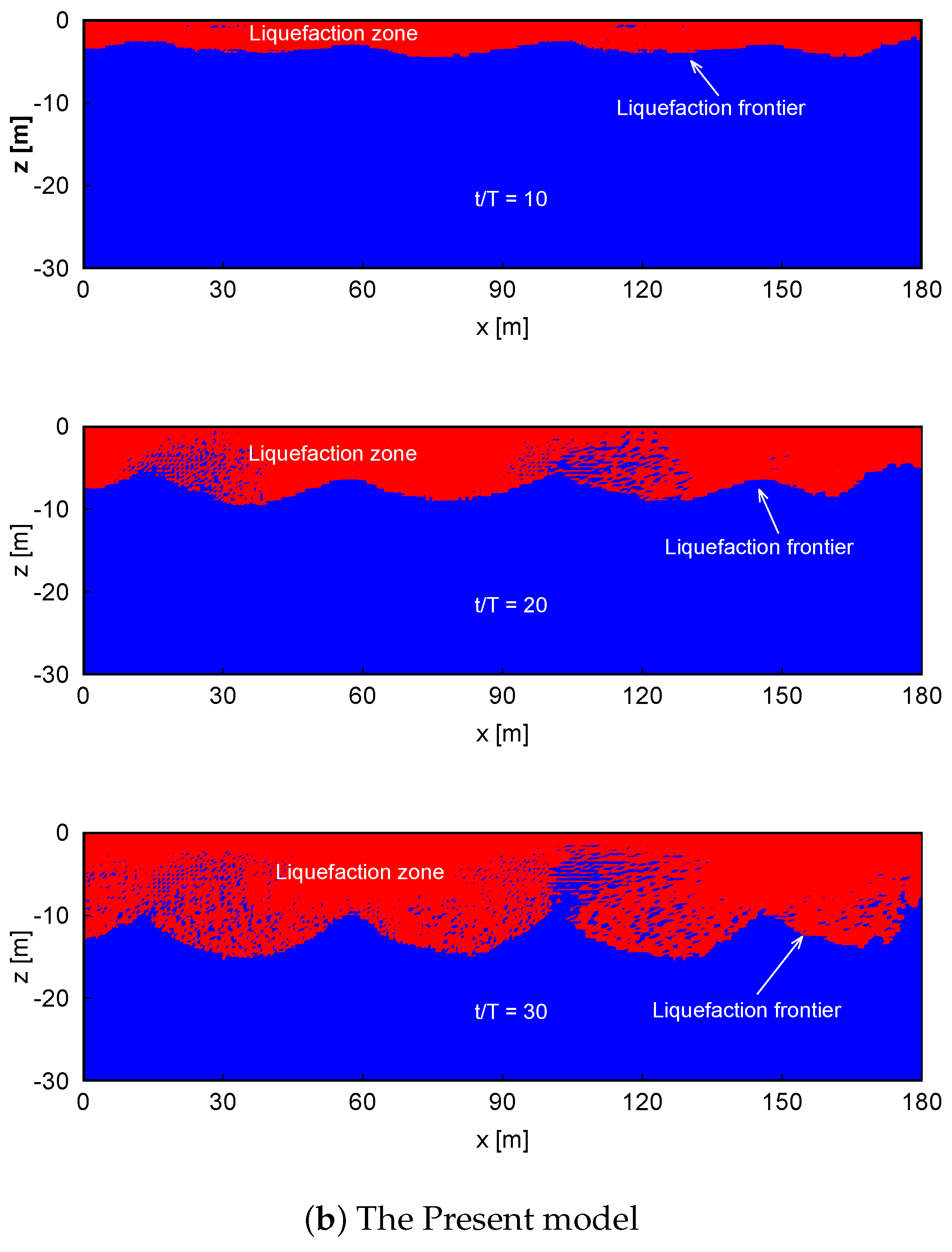
4.1. Seabed Liquefaction
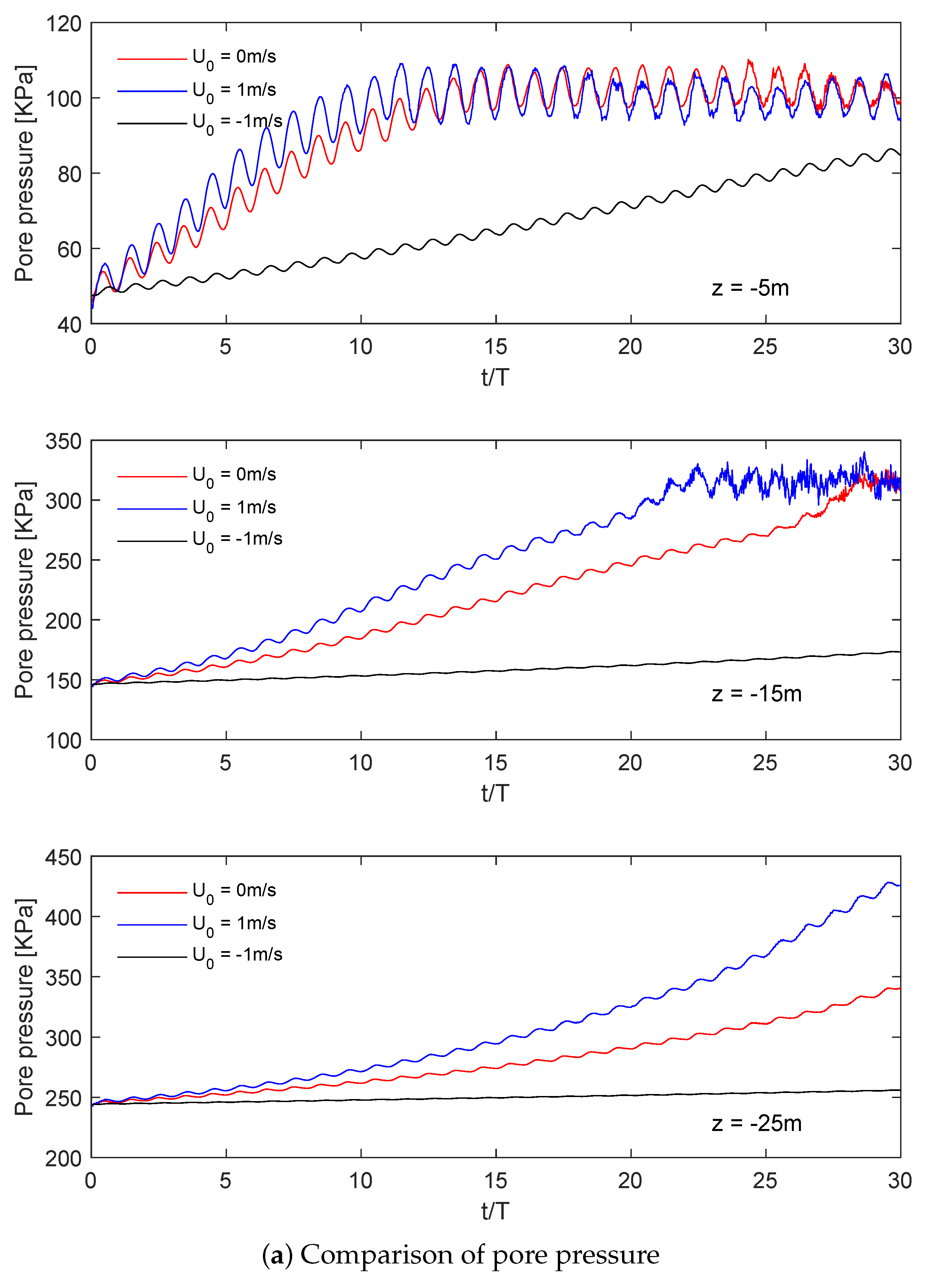
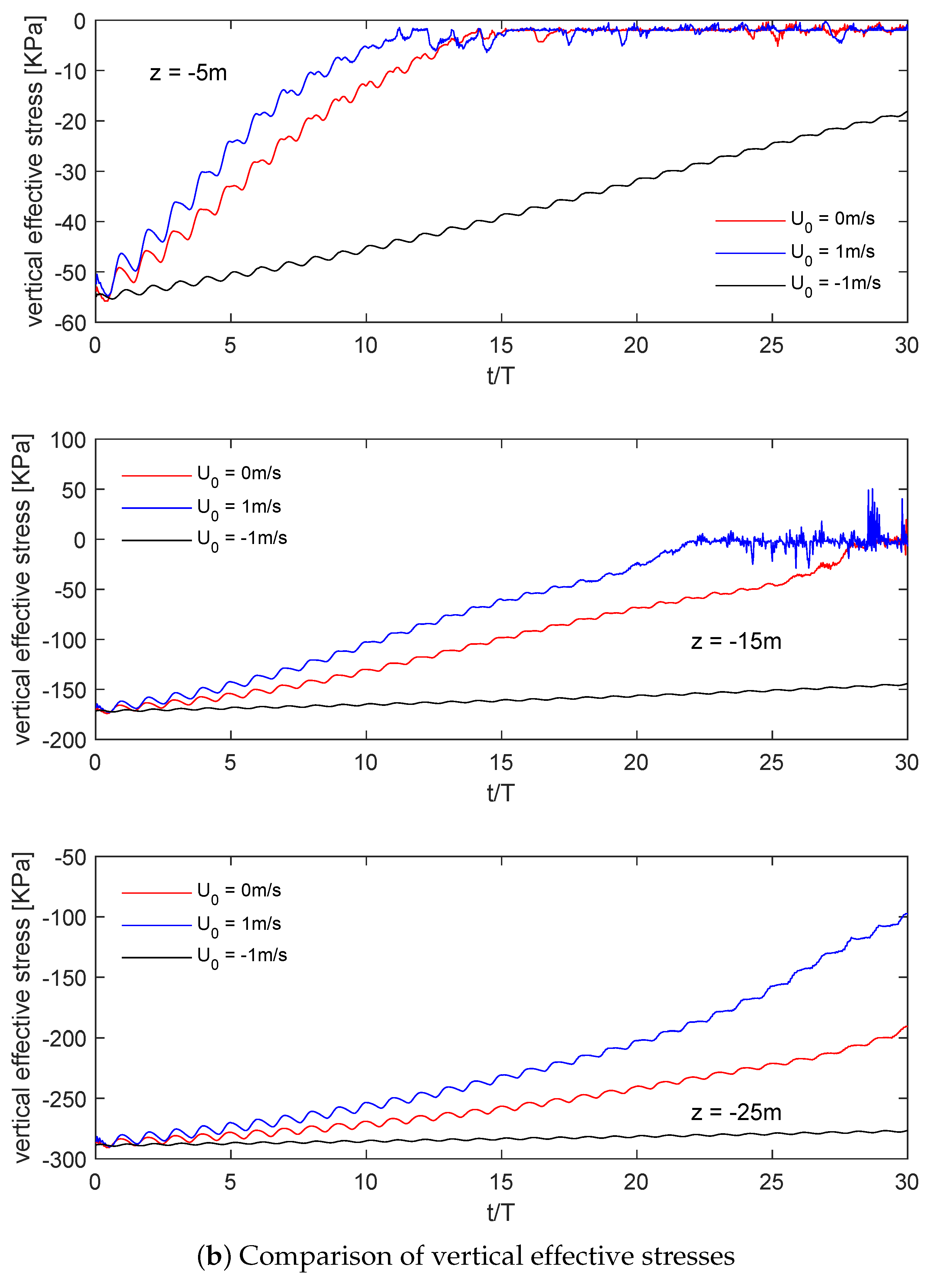
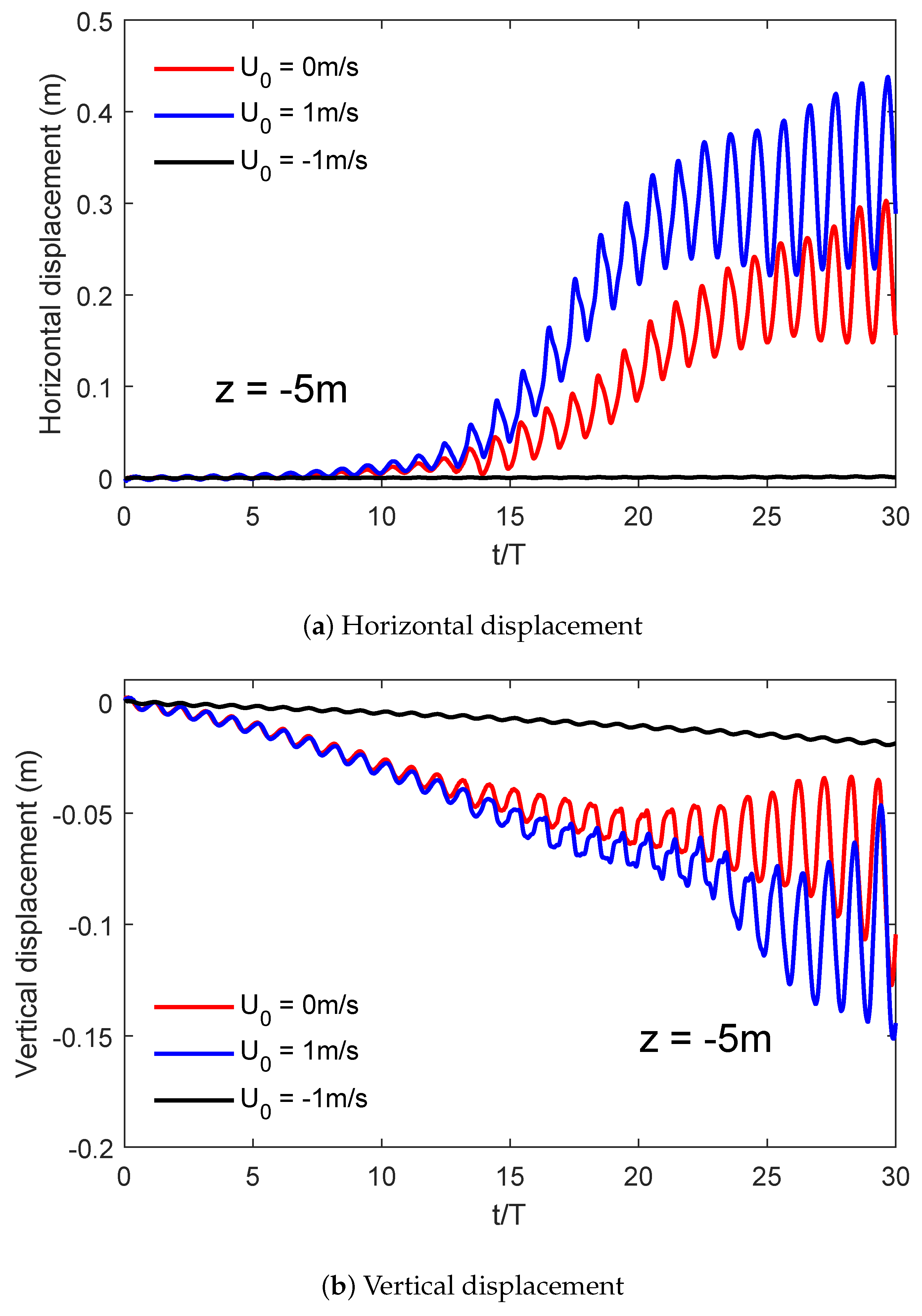
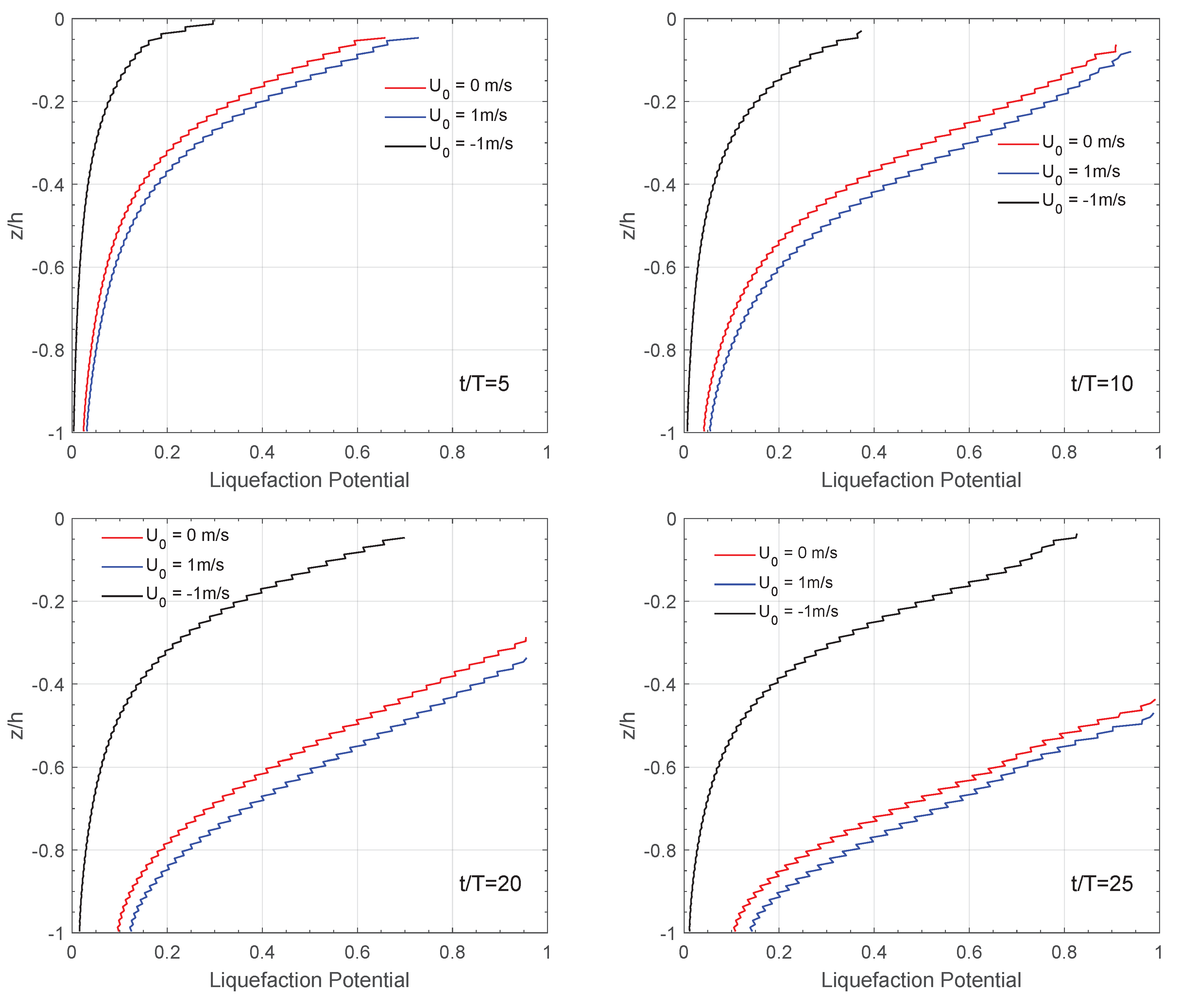
4.2. Effect of Currents
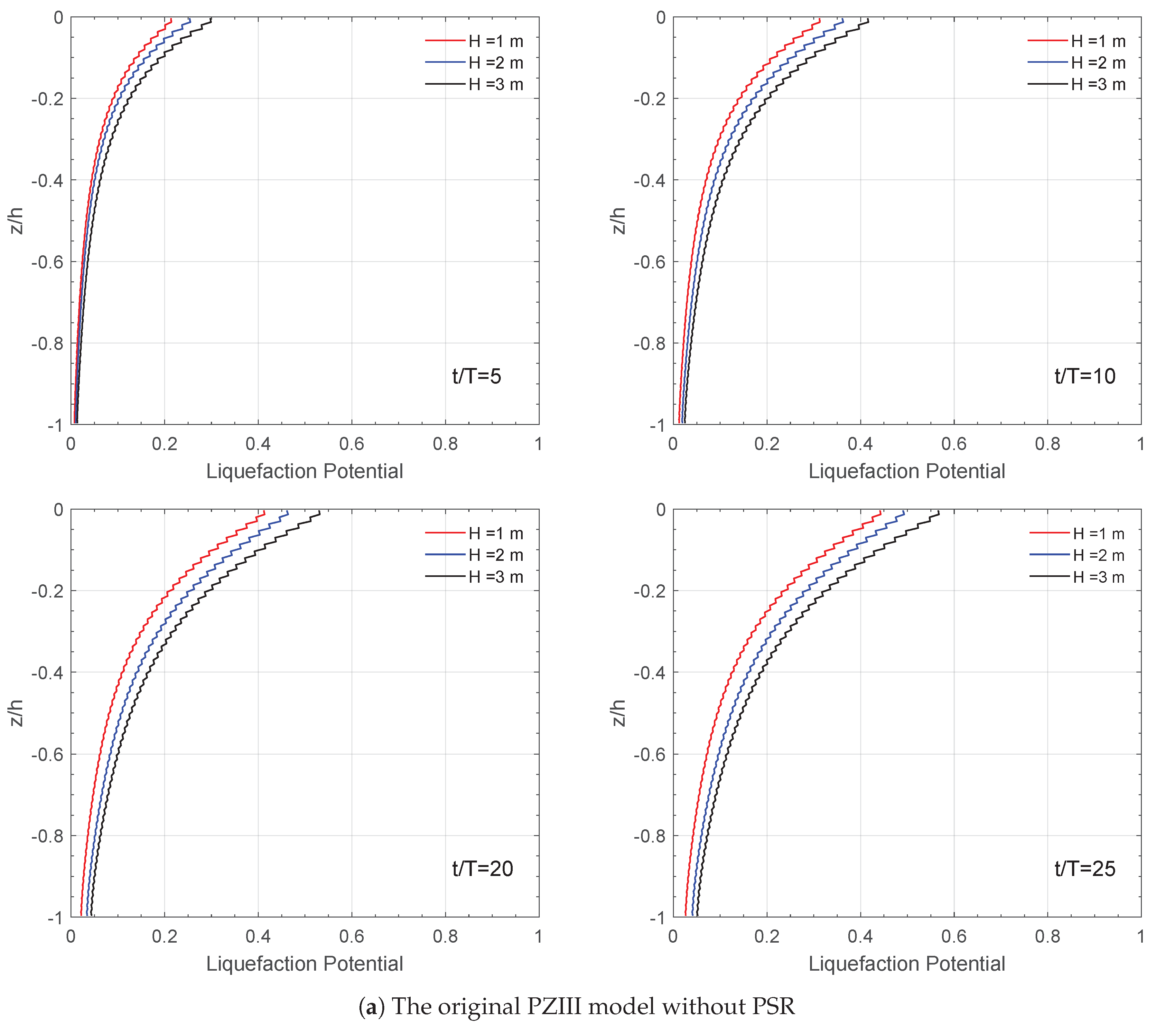
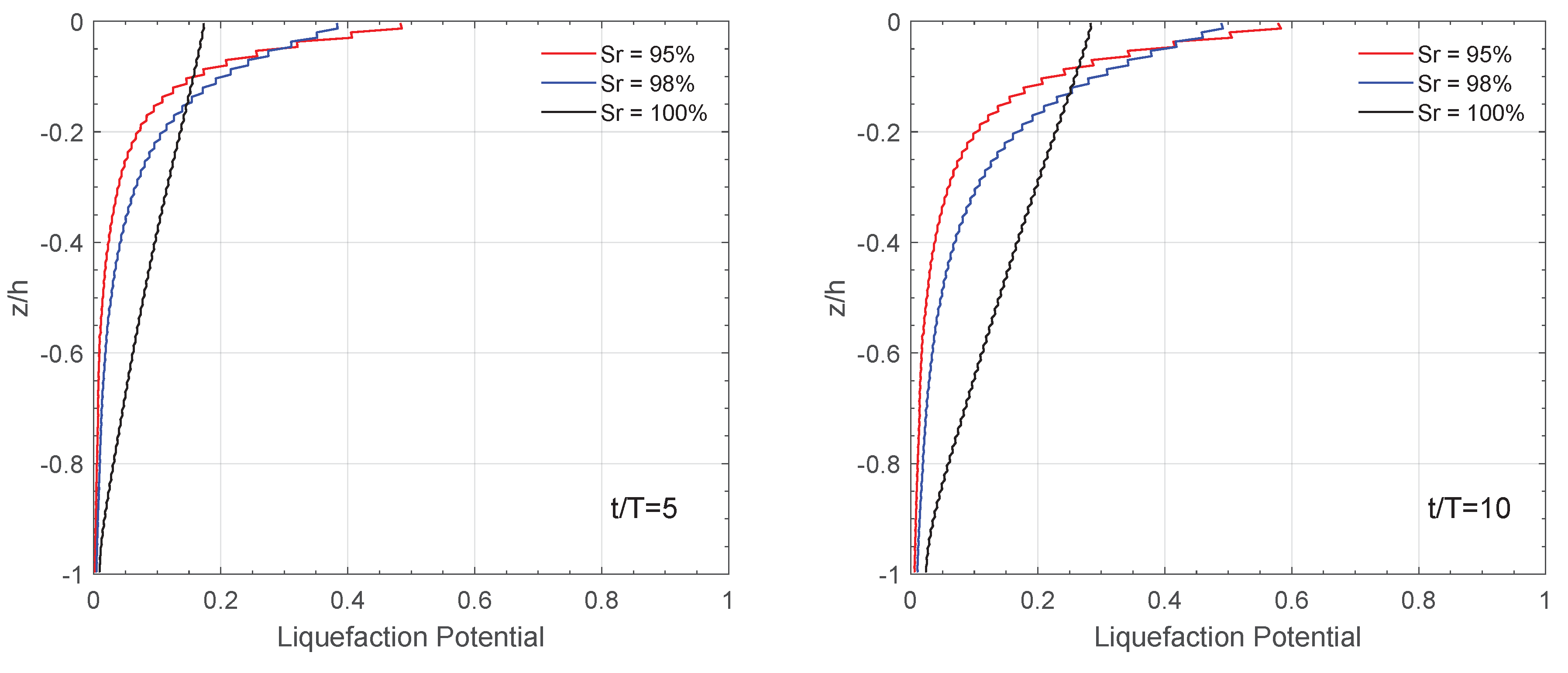
4.3. Effect of Principal Stress Rotation with Various Wave and Soil Parameters
5. Conclusions
- (1)
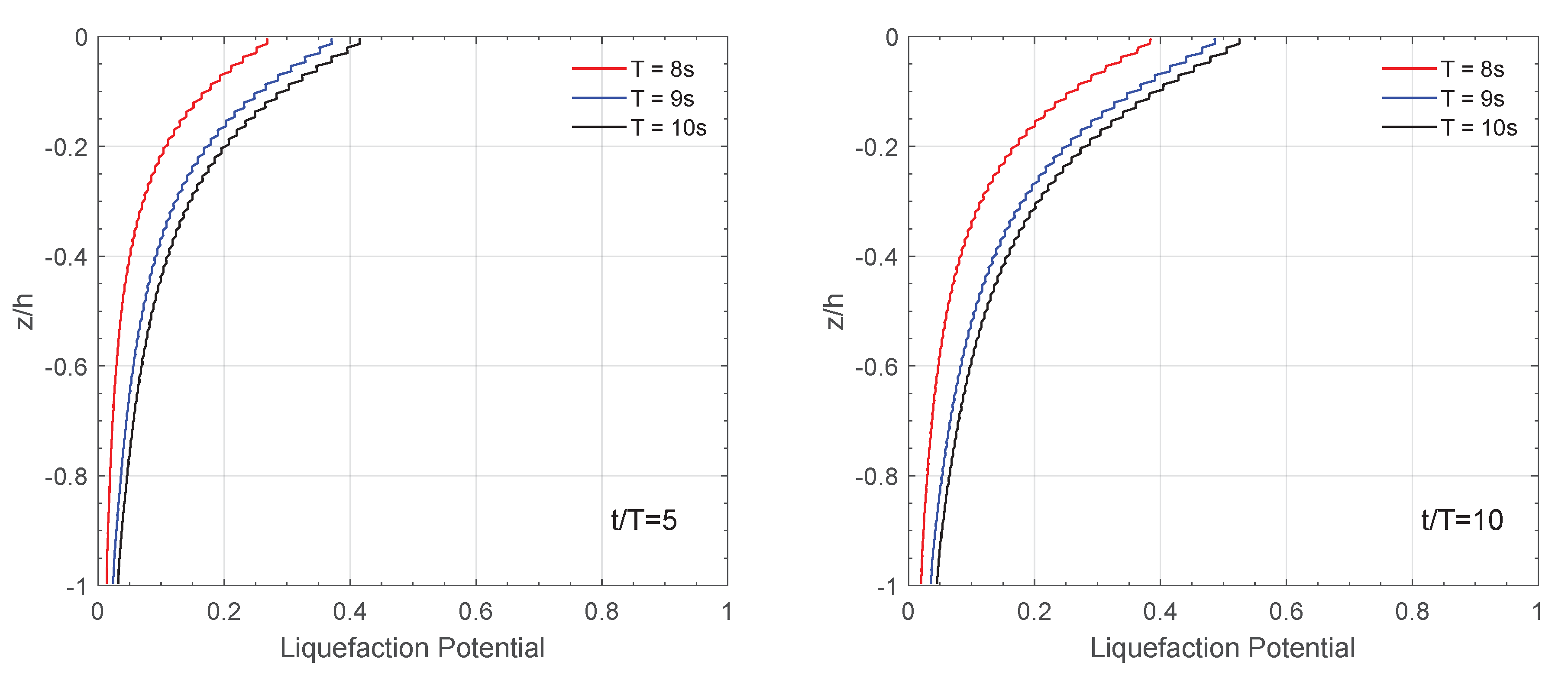
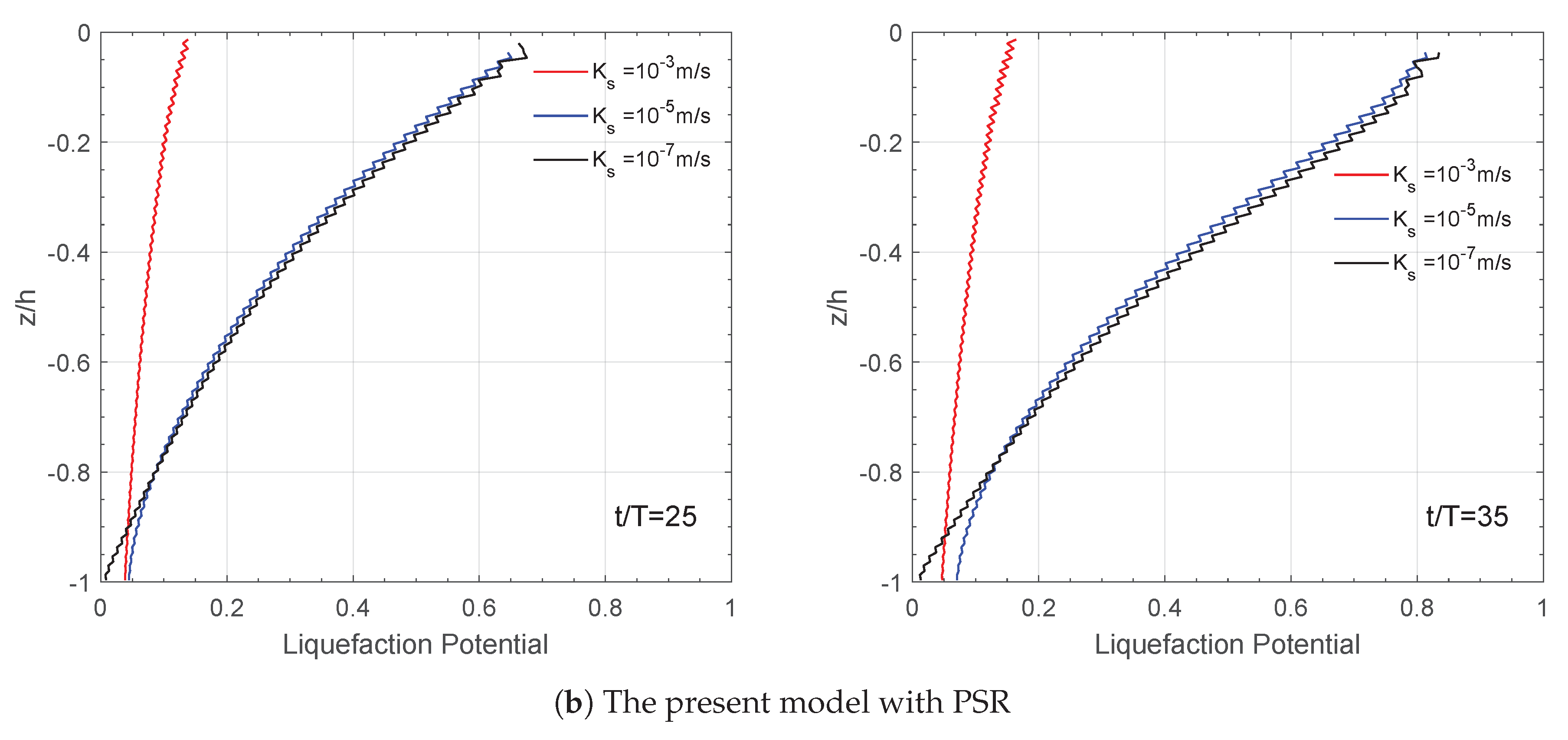
- Principal stress rotation (PSR) has a significant effect on the soil liquefaction depth. It accelerates the growth of pore pressures and reduces the vertical effective stress, so that the soil is easier to liquefy.
- (2)
- The existence of ocean currents has an important impact on the development of the liquefaction potential of a seabed foundation. When considering the interactions between waves and currents, the soil pore pressure and effective force change significantly and have a significant impact on soil liquefaction. The following current aggravates the soil reaction and promotes soil liquefaction. On the contrary, the opposing current reduces soil instability and plays a positive role in soil stability.
- (3)
- With the combined action of waves and current, the seabed with porous media shows pronounced lateral expansion and vertical settlement.
- (4)
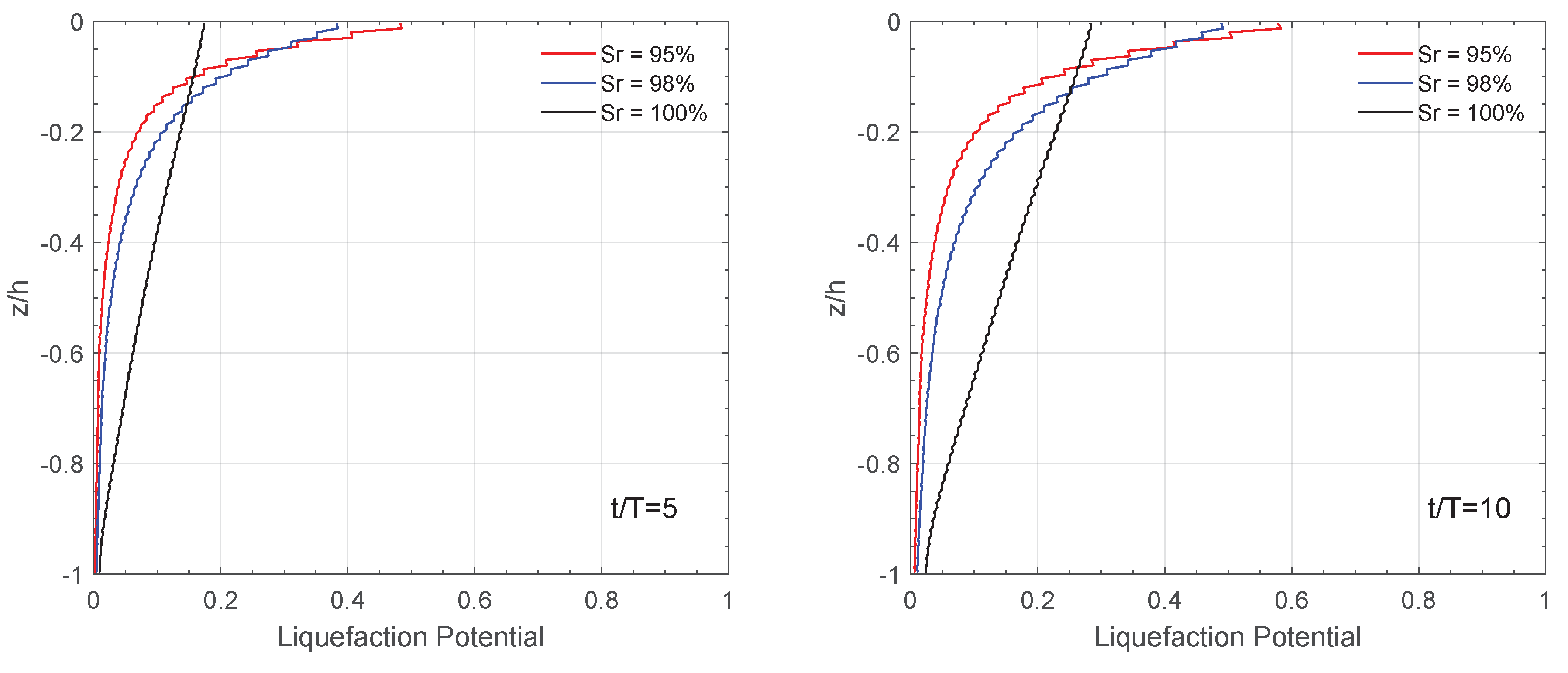
- The liquefaction potential of the elastoplastic seabed foundation increases with time and decreases with depth. This indicates that liquefaction is more likely to occur in the upper layer of the seabed foundation.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sumer, B.M. Liquefaction around Mainre Structures; World Scientific: Hackensack, NJ, USA, 2014. [Google Scholar]
- Jeng, D.S. Mechanics of Wave-Seabed-Structure Interactions: Modelling, Processes and Applications; Cambridge University Press: Cambridge, UK, 2018. [Google Scholar]
- Zen, K.; Yamazaki, H. Mechanism of wave-induced liquefaction and densification in seabed. Soils Found. 1990, 30, 90–104. [Google Scholar] [CrossRef]
- Sumer, B.M.; Fredsøe, J. The Mechanics of Scour in the Marine Environment; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2002. [Google Scholar]
- Jeng, D.S. Porous Models for Wave-Seabed Interactions; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Yamamoto, T.; Koning, H.; Sellmeijer, H.; Hijum, E.V. On the response of a poro-elastic bed to water waves. J. Fluid Mech. 1978, 87, 193–206. [Google Scholar] [CrossRef]
- Seed, H.B.; Rahman, M.S. Wave-induced pore pressure in relation to ocean floor stability of cohesionless soils. Mar. Geotechnol. 1978, 3, 123–150. [Google Scholar] [CrossRef]
- Jeng, D.S.; Seymour, B.R. A simplified analytical approximation for pore-water pressure build-up in a porous seabed. J. Waterw. Port Coast. Ocean Eng. ASCE 2007, 133, 309–312. [Google Scholar] [CrossRef]
- Biot, M.A. General theory of three-dimensional consolidation. J. Appl. Phys. 1941, 26, 155–164. [Google Scholar] [CrossRef]
- Jeng, D.S.; Rahman, M.S. Effective stresses in a porous seabed of finite thickness: Inertia effects. Can. Geotech. J. 2000, 37, 1383–1392. [Google Scholar] [CrossRef]
- Jeng, D.S.; Cha, D.H. Effects of dynamic soil behavior and wave non-linearity on the wave-induced pore pressure and effective stresses in porous seabed. Ocean Eng. 2003, 30, 2065–2089. [Google Scholar] [CrossRef]
- Ulker, M.; Rahman, M.S. Response of saturated and nearly saturated porous media: Different formulations and their applicability. Int. J. Numer. Anal. Methods Geomech. 2009, 33, 633–664. [Google Scholar] [CrossRef]
- Jeng, D.S.; Lin, Y.S. Finite element modelling for water waves–soil interaction. Soil Dyn. Earthq. Eng. 1996, 15, 283–300. [Google Scholar] [CrossRef]
- Jeng, D.S.; Ye, J.H.; Zhang, J.S.; Liu, P.L.F. An integrated model for the wave-induced seabed response around marine structures: Model verifications and applications. Coast. Eng. 2013, 72, 1–19. [Google Scholar] [CrossRef]
- Lin, Z.; Guo, Y.K.; Jeng, D.S.; Liao, C.C.; Rey, N. An integrated numerical model for wave–soil–pipeline interaction. Coast. Eng. 2016, 108, 25–35. [Google Scholar] [CrossRef]
- Zhao, H.Y.; Jeng, D.S.; Liao, C.C. Three-dimensional modeling of wave-induced residual seabed response around mono-pile foundation. Coast. Eng. 2017, 128, 1–21s. [Google Scholar] [CrossRef]
- Seed, H.B.; Martin, P.O.; Lysmer, J. The Generation and Dissipation of Pore Water Pressure During Soil Liquefaction; Technical Report; College of Engineering, University of California: Berkeley, CA, USA, 1975. [Google Scholar]
- Jeng, D.S.; Zhao, H.Y. Two-dimensional model for pore pressure accumulations in marine sediments. J. Waterw. Port Coast. Ocean Eng. ASCE 2015, 141, 04014042. [Google Scholar] [CrossRef]
- Zhao, H.; Jeng, D.S.; Guo, Z.; Zhang, J.S. Two-dimensional model for pore pressure accumulations in the vicinity of a buried pipeline. J. Offshore Mech. Arct. Eng. ASME 2014, 136, 042001. [Google Scholar] [CrossRef]
- Sassa, S.; Sekiguchi, H.; Miyamamot, J. Analysis of progressive liquefaction as moving-boundary problem. Géotechnique 2001, 51, 847–857. [Google Scholar] [CrossRef]
- Liao, C.C.; Zhao, H.Y.; Jeng, D.S. Poro-elastoplastic model for wave-induced liquefaction. J. Offshore Mech. Arct. Eng. ASME 2015, 137, 042001. [Google Scholar] [CrossRef]
- Chan, A.H.C. User Mannual for DIANA-SWANDYNE II-Dynamic Interaction and Nonlinear Analysis Swansea Dynamic Program Version II; Technical Report; School of Civil Engineering, University of Birmingham: Birmingham, UK, 1995. [Google Scholar]
- Pastor, M.; Zienkiewicz, O.C.; Chan, A.H.C. Generalized plasticity and the modeling of soil behaviour. Int. J. Numer. Anal. Methods Geomech. 1990, 14, 151–190. [Google Scholar] [CrossRef]
- Dunn, S.L.; Vun, P.L.; Chan, A.H.C.; Damgaard, J.S. Numerical Modeling of Wave-induced Liquefaction around Pipelines. J. Waterw. Port Coast. Ocean Eng. ASCE 2006, 132, 276–288. [Google Scholar] [CrossRef]
- Jeng, D.S.; Ou, J. 3-D models for wave-induced pore pressure near breakwater heads. Acta Mech. 2010, 215, 85–104. [Google Scholar] [CrossRef]
- Hsu, H.C.; Chen, Y.Y.; Hsu, J.R.C.; Tseng, W.J. Nonlinear water waves on uniform current in Lagrangian coordinates. J. Nonlinear Math. Phys. 2009, 16, 47–61. [Google Scholar] [CrossRef]
- Ye, J.; Jeng, D.S. Response of seabed to natural loading-waves and currents. J. Eng. Mech. ASCE 2012, 138, 601–613. [Google Scholar] [CrossRef]
- Wen, F.; Jeng, D.S.; Wang, J.H. Numerical modeling of response of a saturated porous seabed around an offshore pipeline considering non-linear wave and current interactions. Appl. Ocean Res. 2012, 35, 25–37. [Google Scholar] [CrossRef]
- Zhang, Y.; Jeng, D.S.; Gao, F.P.; Zhang, J.S. An analytical solution for response of a porous seabed to combined wave and current loading. Ocean Eng. 2013, 57, 240–247. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.S.; Zhang, Y.; Jeng, D.S.; Liu, P.L.F.; Zhang, C. Numerical simulation of wave-current interaction. Ocean Eng. 2014, 75, 157–164. [Google Scholar] [CrossRef]
- Zhang, J.S.; Zhang, Y.; Zhang, C.; Jeng, D.S. Numerical modeling of seabed response to the combined wave-current loading. J. Offshore Mech. Arct. Eng. ASME 2013, 135, 031102. [Google Scholar] [CrossRef]
- Liao, C.C.; Jeng, D.-S.; Lin, Z.; Guo, Y.; Zhang, Q. Wave (Current)-Induced Pore Pressure in Offshore Deposits: A Coupled Finite Element Model. J. Mar. Sci. Eng. 2019, 6, 83. [Google Scholar] [CrossRef]
- Qi, W.G.; Gao, F.P. Physical modelling of local scour development around a large-diameter monopile in combined waves and current. Coast. Eng. 2014, 83, 72–81. [Google Scholar] [CrossRef]
- Qi, W.G.; Li, C.F.; Jeng, D.S.; Gao, F.P.; Liang, Z.D. Combined wave-current induced excess pore-pressure in a sandy seabed: Flume observations and comparisons with analytical solution. Coast. Eng. 2019, 147, 89–98. [Google Scholar] [CrossRef]
- Sassa, S.; Sekiguchi, H. Analysis of wave-induced liquefaction of sand beds. Géotechnique 2001, 51, 115–126. [Google Scholar] [CrossRef]
- Jafarian, Y.; Towhata, I.; Baziar, M.H.; Noorzaid, A. Strain energy based evaluation of liquefaction and residual pore water pressure in sands using cyclic torsional shear experiment. Soil Dyn. Earthq. Eng. 2012, 35, 13–28. [Google Scholar] [CrossRef]
- Konstadinou, M.; Georgiannou, V.N. Cyclic behaviour of loose anisotropically consolidated Ottawa sand under undrained torsional loading. Géotechnique 2013, 63, 1144–1158. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Morz, Z. Generalized plasticity formulation and applications to geomechanics. Mech. Eng. Mater. 1984, 44, 655–680. [Google Scholar]
- Zhu, J.F.; Zhao, H.Y.; Jeng, D.S. Effects of principal stress rotation on wave-induced soil response in a poro-elastoplastic sandy seabed. Acta Geotech. 2019. [Google Scholar] [CrossRef]
- Sassa, S.; Sekiguchi, H. Wave-induced liquefaction of beds of sand in a centrifuge. Géotechnique 1999, 49, 621–638. [Google Scholar] [CrossRef]
- Hsu, J.R.C.; Jeng, D.S. Wave-induced soil response in an unsaturated anisotropic seabed of finite thickness. Int. J. Numer. Anal. Methods Geomech. 1994, 18, 785–807. [Google Scholar] [CrossRef]
- Ye, J.H.; Jeng, D.S.; Wang, R.; Zhu, C. Validation of a 2-D semi-coupled numerical model for fluid-structure- seabed interaction. J. Fluids Struct. 2013, 42, 333–357. [Google Scholar] [CrossRef]
- Ran, Q.; Tong, J.; Song, S.; Fu, X.; Xu, Y. Incompressible SPH scour model for movable bed dam break flows. Adv. Water Resour. 2015, 82, 39–50. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Li, S.; Arikawa, T.; Gen, H. ISPH simulation of scour behind seawall due to continuous tsunami overflwo. Coast. Eng. J. 2016, 58, 1650014. [Google Scholar] [CrossRef]
- Manenti, S.; Pierobon, E.; Gallati, M.; Sibilla, S.; D’Alpaos, L.; Macchi, E.; Todeschini, S. Vajont disaster: Smoothed particle hydrodynamics modelling of the postevent 2D experiments. J. Hydraul. Eng. ASCE 2016, 142, 05015007. [Google Scholar] [CrossRef]
- Wang, D.; Shao, S.; Li, S.; Shi, Y.; Arikawa, T.; Zhang, H. 3D ISPH erosion model for flow passing a vertical cylinder. J. Fluids Struct. 2018, 78, 374–399. [Google Scholar] [CrossRef]
- Jacobsen, N.G.; Fuhrman, D.R.; Fredsøe, J. A wave generation toolbox for the open-source CFD library: OpenFOAM. Int. J. Numer. Methods Fluids 2012, 70, 1073–1088. [Google Scholar] [CrossRef]
- Higuera, P.; Lara, J.L.; Losada, I.J. Realistic wave generation and active wave absorption for Navier-Stokes models: Application to OpenFOAM. Coast. Eng. 2013, 71, 102–118. [Google Scholar] [CrossRef]
- Higuera, P.; Lara, J.L.; Losada, I.J. Three-dimensional interaction of waves and porous coastal structures using OpenFOAM. Part II: Application. Coast. Eng. 2014, 83, 259–270. [Google Scholar] [CrossRef]
- Engelund, F. On the Laminar and Turbulent Flows of Ground Water Through Homogeneous Sand; Danish Academy of Technical Sciences; Akademie for de Tekniske Videnskaber: Koebenhavn, Denmark, 1953. [Google Scholar]
- De Jesus, M.; lara, J.L.; Losada, I.J. Three-dimensional interaction of waves and porous coastal structures: Part I: Numerical model formulation. Coast. Eng. 2012, 64, 57–72. [Google Scholar] [CrossRef]
- Higuera, P. Application of Computational Fluid Dynamics to Wave Action On Structures. Ph.D. Thesis, Universidade de Cantabria, Cantabria, Spain, 2015. [Google Scholar]
- Biot, M.A. Theory of propagation of elastic waves in a fluidsaturated porous solid, Part I: Low frequency range. J. Acoust. Soc. Am. 1956, 28, 168–177. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Chang, C.T.; Bettess, P. Drained, undrained, consolidating and dynamic behaviour assumptions in soils. Géotechnique 1980, 30, 385–395. [Google Scholar] [CrossRef]
- Verruijt, A. Flow Through Porous Media; Academic Press: London, UK, 1969; Chapter Elastic Storage of Aquifers; pp. 331–376. [Google Scholar]
- Towhata, I.; Ishihara, K. Undrained strength of sand undergoing cyclic rotation of principal stress axes. Soils Found. 1985, 25, 135–147. [Google Scholar] [CrossRef]
- Rodriguea, N.M.; Lade, P.V. Non-coaxiality of strain increment and stress directions in cross-anisotropic sand. Int. J. Soild Struct. 2014, 51, 1103–1114. [Google Scholar] [CrossRef] [Green Version]
- Ong, D.E.L.; Choo, C.S. Assessment of non-linear rock strength parameters for the estimation of pipe-jacking forces. Part 1. Direct shear testing and backanalysis. Eng. Geol. 2018, 244, 159–172. [Google Scholar] [CrossRef]
- Ong, D.E.L.; Sim, Y.S.; Leung, C.F. Performance of Field and Numerical Back-Analysis of Floating Stone Columns in Soft Clay Considering the Influence of Dilatancy. Int. J. Geomech. ASCE 2018, 18, 04018135. [Google Scholar] [CrossRef]
- Okusa, S. Wave-induced stress in unsaturated submarine sediments. Géotechnique 1985, 35, 517–532. [Google Scholar] [CrossRef]
- Wu, J.; Kammerer, A.; Riemer, M.; Seed, R.; Pestana, J. Laboratory study of liquefication triggering criteria. In Proceedings of the 13th World Conference on Earthquake Engineeirng, Vancouver, BC, Canada, 1–6 August 2004; p. 2580. [Google Scholar]
- Liu, Z.; Jeng, D.S.; Chan, A.H.; Luan, M.T. Wave-induced progressive liquefaction in a poro-elastoplastic seabed: A two-layered model. Int. J. Numer. Anal. Methods Geomech. 2009, 33, 591–610. [Google Scholar] [CrossRef]
- Liu, P.; Wang, Z.; Li, X.; Chan, A.H.C. Calibration and validation of a sand model considering the effects of wave-induced principal stress axes rotation. Acta Oceanol. Sin. 2015, 34, 105–115. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (kPa) | 24,727.3 | (kPa) | 34,000 |
| 0.3 | 5.5 | ||
| (kPa) | 600 | (kPa) | 1000 |
| 6.0 | 0.7 | ||
| 0.42 | 0.005 | ||
| a | 0.25 | b | 0.65 |
| (kPa) | 4 |
| Wave and Seabed Characteristics | Parameters for PZIII Model | ||
|---|---|---|---|
| T (s) | 4.55 | (kPa) | 700 |
| h (m) | 1.7 | (kPa) | 1000 |
| d (m) | 4.5 | (kPa) | 660.8 |
| (m) | 25 | (kPa) | 770.0 |
| H (m) | 5.0 | 6.0 | |
| (%) | 100 | 4.0 | |
| (m/s) | 0.00015 | 1.2124 | |
| 0.2 | |||
| 2.5 | |||
| 0.75 | |||
| 0.01 | |||
| (kPa) | 4 | ||
| a | 0.3 | ||
| c | 0.5 | ||
| Parameters | Original PZIII | The Present Model | Unit |
|---|---|---|---|
| 2000 | 2000 | kPa | |
| 2600 | 2600 | kPa | |
| 4.0 | 4.0 | kPa | |
| 1.32 | - | - | |
| 1.3 | - | - | |
| 0.45 | - | - | |
| 0.45 | - | - | |
| 4.2 | 4.2 | - | |
| 0.2 | 0.2 | - | |
| 750 | 750 | kPa | |
| 40,000 | 40,000 | kPa | |
| 4 | 4 | - | |
| 0.98 | 0.98 | - | |
| n | 0.397 | 0.397 | - |
| - | 1.32 | - | |
| - | 1.3 | - | |
| - | 0.45 | - | |
| a | - | 0.1 | - |
| c | - | 0.1 | - |
| - | 0.4286 | - |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Jeng, D.-S.; Zhu, J.-F.; Zhao, H. Effects of Principal Stress Rotation on the Fluid-Induced Soil Response in a Porous Seabed. J. Mar. Sci. Eng. 2019, 7, 123. https://doi.org/10.3390/jmse7050123
Li Z, Jeng D-S, Zhu J-F, Zhao H. Effects of Principal Stress Rotation on the Fluid-Induced Soil Response in a Porous Seabed. Journal of Marine Science and Engineering. 2019; 7(5):123. https://doi.org/10.3390/jmse7050123
Chicago/Turabian StyleLi, Zhengxu, Dong-Sheng Jeng, Jian-Feng Zhu, and Hongyi Zhao. 2019. "Effects of Principal Stress Rotation on the Fluid-Induced Soil Response in a Porous Seabed" Journal of Marine Science and Engineering 7, no. 5: 123. https://doi.org/10.3390/jmse7050123
APA StyleLi, Z., Jeng, D.-S., Zhu, J.-F., & Zhao, H. (2019). Effects of Principal Stress Rotation on the Fluid-Induced Soil Response in a Porous Seabed. Journal of Marine Science and Engineering, 7(5), 123. https://doi.org/10.3390/jmse7050123