On the Information Advantage of Sidescan Sonar Three-Frequency Colour over Greyscale Imagery


Abstract
1. Introduction
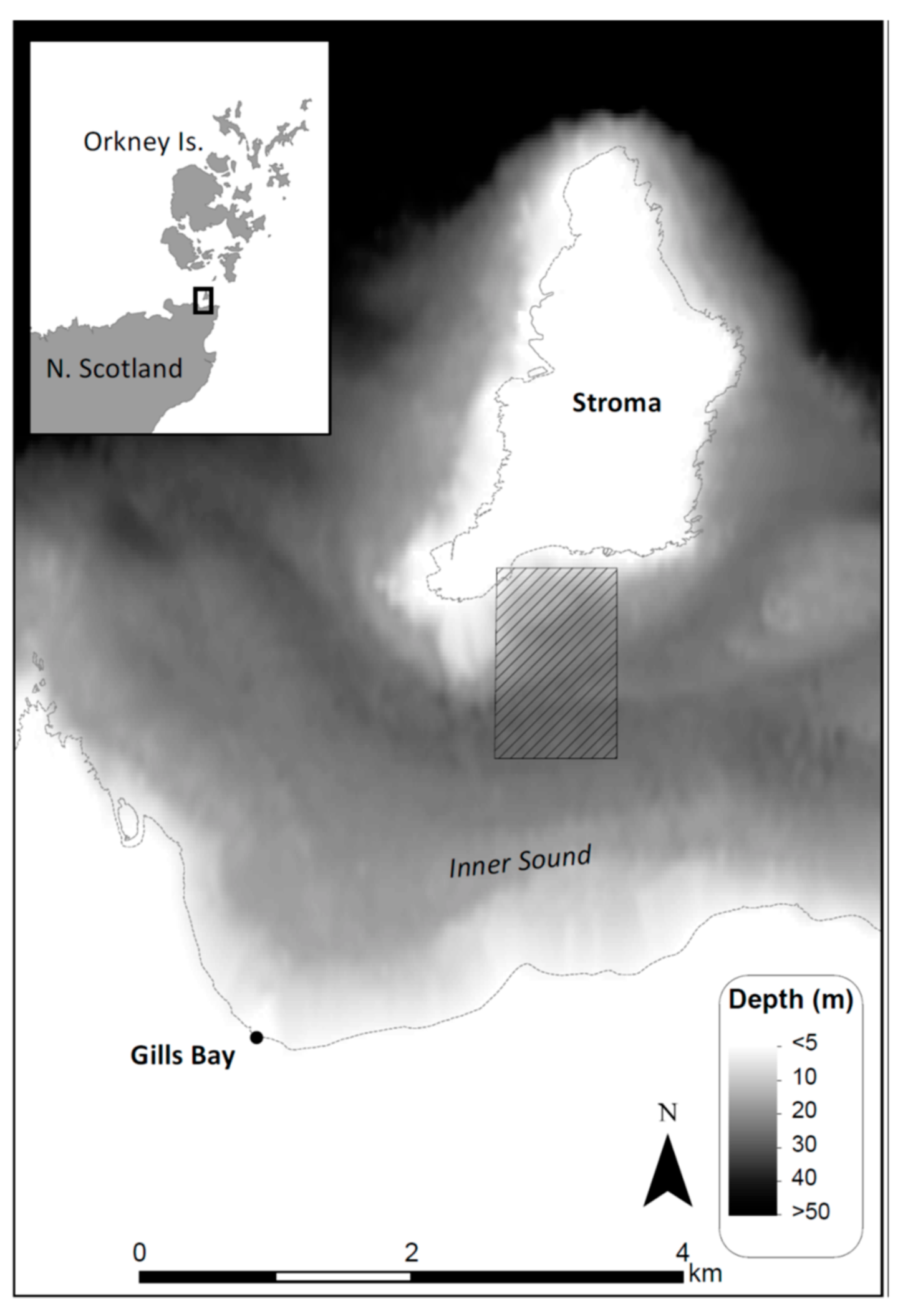
2. Resurvey of the Inner Sound, Pentland Firth
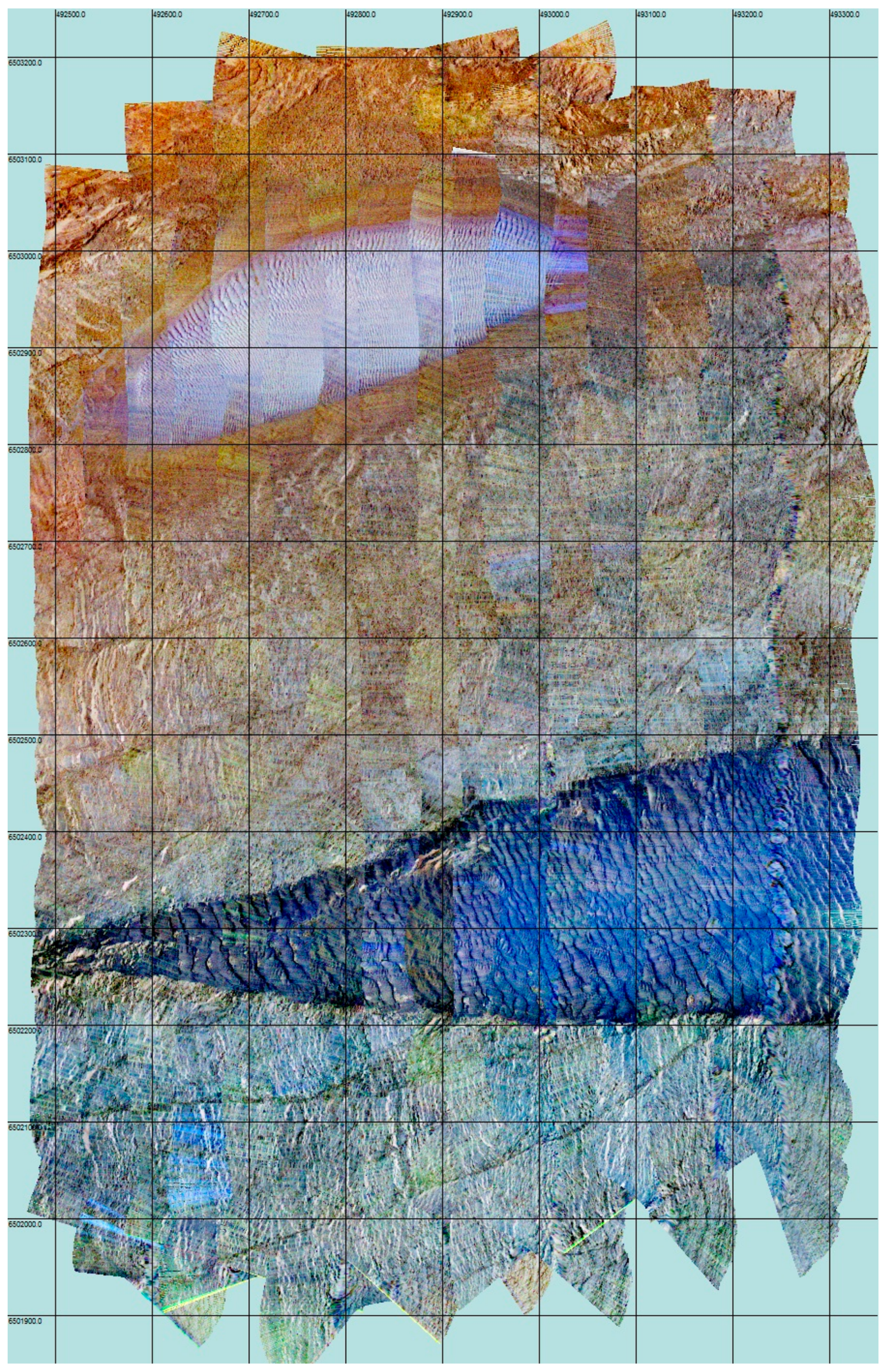
2.1. Three-Frequency Colour
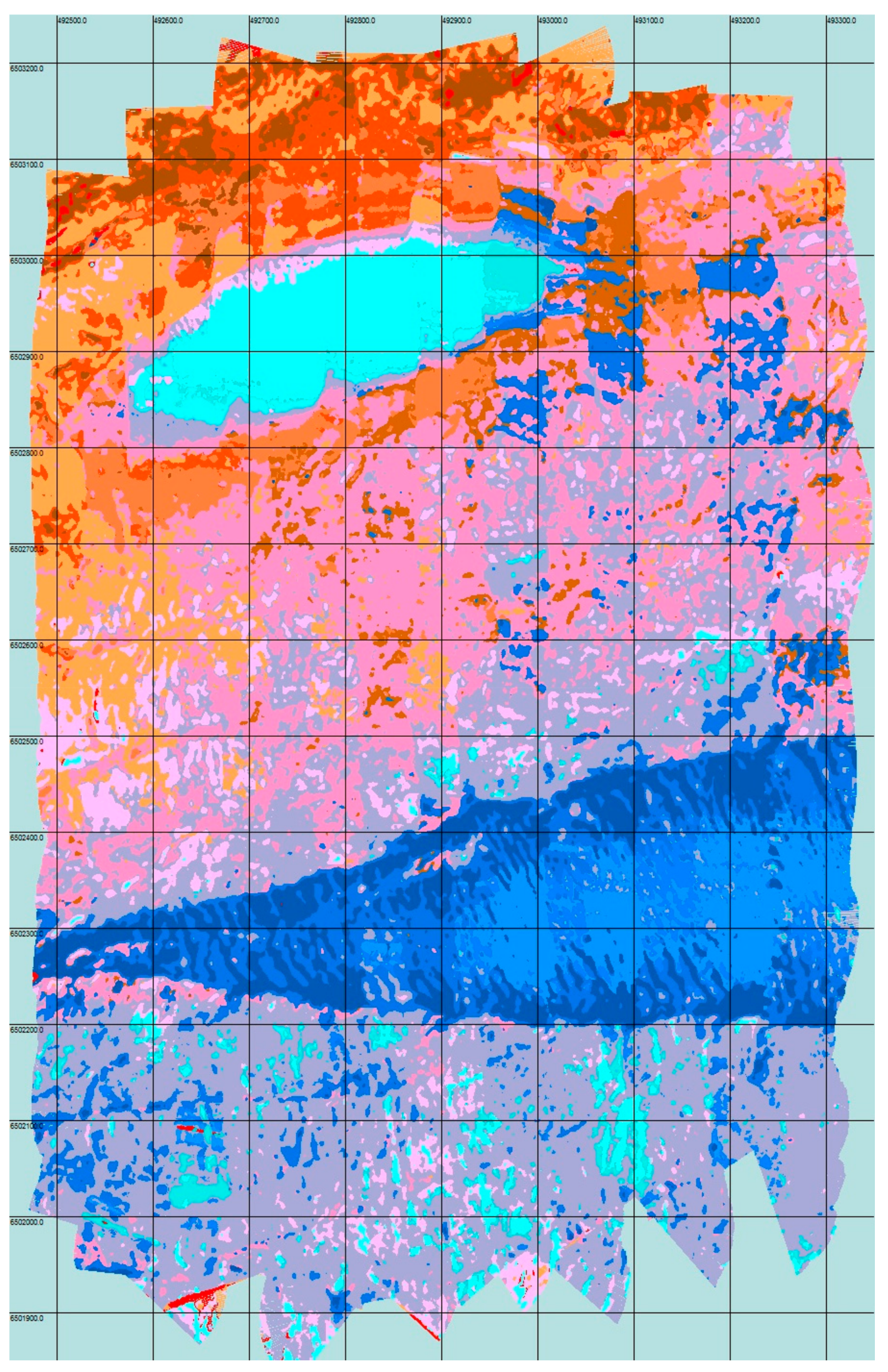
2.2. Three-Frequency Colour Reduced to Greyscale
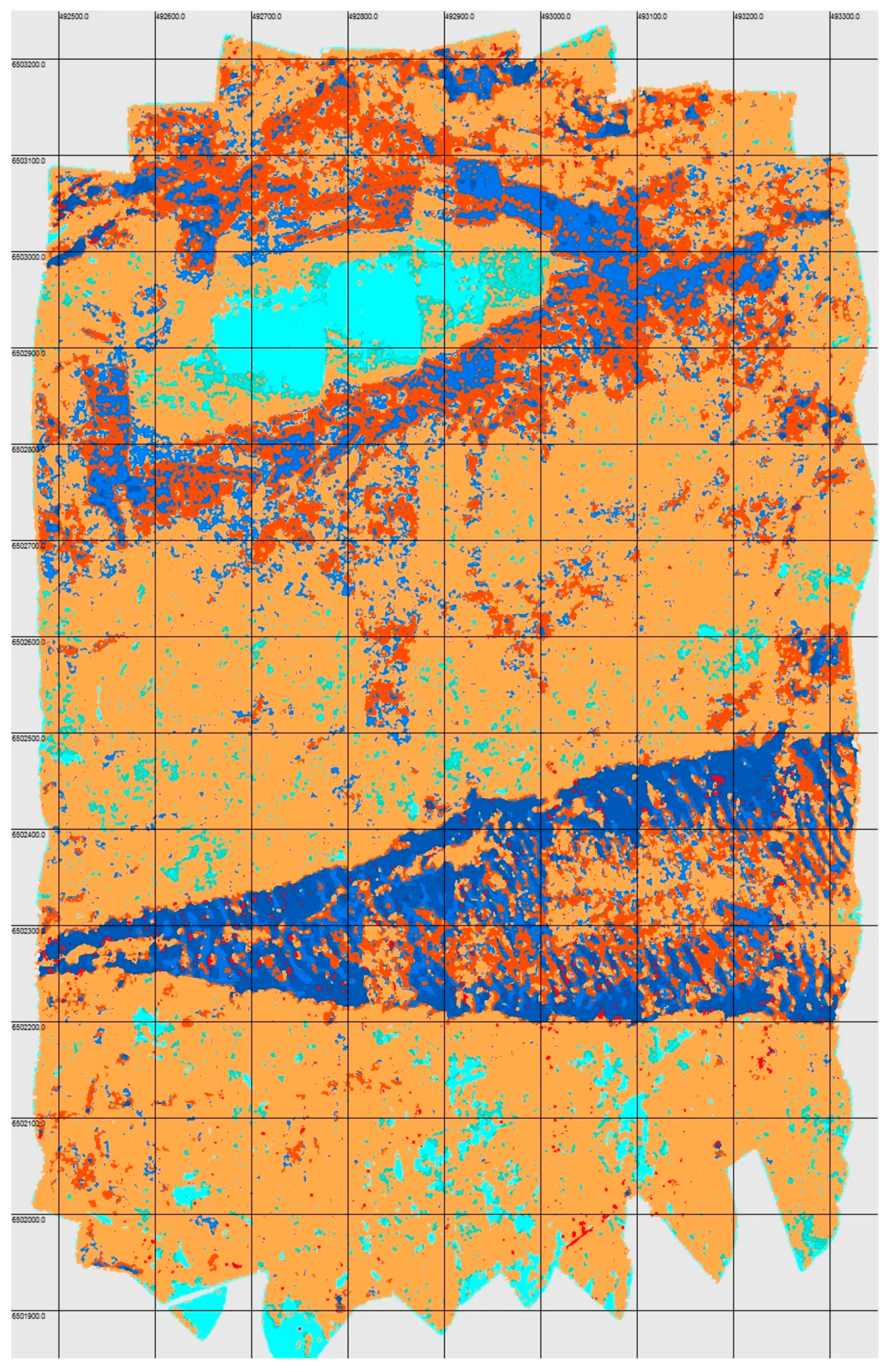
2.3. Mid-Frequency Greyscale
3. Remarks
3.1. The Information Inherent in Colour and Greyscale Images
3.2. ‘Ping’ and ‘Chirp’ Sidescan Sonar
4. Concluding Comment
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Moore, R.K.; Kans, L. Poly-Panchromatic Target Identification. U.S. Patent 3,603,919, 7 September 1971. [Google Scholar]
- Tamsett, D. Dual Frequency Colour Sonar. Unpublished Technical Report. August 2012, p. 8. Available online: https://www.researchgate.net/publications/324694755_Dual_Frequency_Colour_Sonar (accessed on 13 August 2019). [CrossRef]
- Hughes Clarke, J.E.; Muggah, J. Multi-Spectral Experiments—EM710 and EM2040C CSL Heron, 17th–28th February 2014, Unpublished Report. 2014.
- Hughes Clarke, J.E. Multispectral acoustic backscatter from multibeam, improved classification potential. In Proceedings of the US Hydrographic Conference, National Harbor, MI, USA, 16–19 March 2015; p. 18. [Google Scholar]
- Tamsett, D.; McIlvenny, J. Colour sonar. Poster presented at: Shallow Survey Conference, Plymouth University, Plymouth, UK, 14–18 September 2015. [Google Scholar]
- Tamsett, D.; McIlvenny, J.; Watts, A. Colour sonar: Multi-frequency side-scan sonar images of the seabed in the Inner Sound of the Pentland Firth, Scotland. J. Mar. Sci. Eng. 2016, 4, 26. [Google Scholar] [CrossRef]
- McIlvenny, J.; Tamsett, D.; Gillibrand, P.A.; Goddijn-Murphy, L. Sediment dynamics in a tidally energetic channel: The Inner Sound, northern Scotland. J. Mar. Sci. Eng. 2016, 4, 31. [Google Scholar] [CrossRef]
- Feldens, P.; Schulze, I.; Papenmeier, S.; Schönke, M. Improved interpretation of marine sedimentary environments using multi-frequency multibeam backscatter data. Geosciences 2018, 8, 214. [Google Scholar] [CrossRef]
- Brown, C.J.; Beaudoin, J.; Brissette, M.; Gazzola, V. Multispectral multibeam echo sounder backscatter as a tool for improved seafloor characterization. Geosciences 2019, 9, 126. [Google Scholar] [CrossRef]
- Janowski, L.; Trzcinska, K.; Tegowski, J.; Kruss, A.; Rucinska-Zjadacz, M.; Pocwiardowski, P. Nearshore benthic habitat mapping based on multi-frequency, multibeam echosounder data using a combined object-based approach: A case study from the Rowy site in the southern Baltic sea. Remote Sens. 2018, 10, 1983. [Google Scholar] [CrossRef]
- Fakiris, E.; Blondel, P.; Papatheodorou, G.; Christodoulou, D.; Dimas, X.; Georgiou, N.; Kordella, S.; Dimitriadis, C.; Rzhanov, Y.; Geraga, M.; et al. Multi-frequency, multi-sonar mapping of shallow habitats—Efficacy and management implications in the national marine park of Zakynthos, Greece. Remote Sens. 2019, 11, 461. [Google Scholar] [CrossRef]
- Tamsett, D.; McIlvenny, J.; King, P. The acoustic colour of the seabed and sub-seabed. In Proceedings of the Oceanology International 2016 Conference, Excel, London, UK, 15–17 March 2016. [Google Scholar]
- Tamsett, D. Geometrical spreading correction in sidescan sonar seabed imaging. J. Mar. Sci. Eng. 2017, 5, 54. [Google Scholar] [CrossRef]
- van Moll, C.A.M.; Ainslie, M.A.; van Vossen, R. A simple and accurate formula for the absorption of sound in seawater. IEEE J. Ocean. Eng. 2009, 34, 610–616. [Google Scholar] [CrossRef]
- Hughes Clarke, J.E.; Danforth, B.W.; Valentine, P. Areal seabed classification using backscatter angular response at 95 kHz. In Proceedings of the Nato Saclantcen Conference Series CP-45, High Frequency Acoust, Shallow Water, Lerici, Italy, 30 June–4 July 1997; pp. 243–250. [Google Scholar]
- Tamsett, D.; Hogarth, P. Sidescan sonar beam function and seabed backscatter functions from trace amplitude and vehicle roll data. IEEE J. Ocean. Eng. 2016, 41, 155–163. [Google Scholar]
- Tamsett, D. Mapping image texture on side-scan sonar records. Dredg. Port Constr. 2001, May, 10–12. [Google Scholar]
- Usher, M.J. Information Theory for Information Technologists; Macmillan Publishers Ltd.: London UK; Basingstoke, UK, 1984. [Google Scholar]
- Au, W.W.L.; Simmons, J.A. Echolocation in dolphins and bats. Phys. Today 2007, 60, 40–45. [Google Scholar] [CrossRef]
- Dawkins, R. Chapter 2—Good design. In The Blind Watchmaker; Penguin Books: London, UK, 1986. [Google Scholar]
- Au, W.W.L. The Sonar of Dolphins; Springer: New York, NY, USA, 1993. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



| Data Type (Image) | , in Bits per Pixel |
|---|---|
| Three frequency colour (Figure 2) | 8.54 (max. 12) |
| Colour reduced to greyscale (Figure 4) | 3.41 (max. 4) |
| Mid-frequency greyscale (Figure 6) | 3.53 (max. 4). |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tamsett, D.; McIlvenny, J.; Baxter, J.; Gois, P.; Williamson, B. On the Information Advantage of Sidescan Sonar Three-Frequency Colour over Greyscale Imagery. J. Mar. Sci. Eng. 2019, 7, 276. https://doi.org/10.3390/jmse7080276
Tamsett D, McIlvenny J, Baxter J, Gois P, Williamson B. On the Information Advantage of Sidescan Sonar Three-Frequency Colour over Greyscale Imagery. Journal of Marine Science and Engineering. 2019; 7(8):276. https://doi.org/10.3390/jmse7080276
Chicago/Turabian StyleTamsett, Duncan, Jason McIlvenny, James Baxter, Paulo Gois, and Benjamin Williamson. 2019. "On the Information Advantage of Sidescan Sonar Three-Frequency Colour over Greyscale Imagery" Journal of Marine Science and Engineering 7, no. 8: 276. https://doi.org/10.3390/jmse7080276
APA StyleTamsett, D., McIlvenny, J., Baxter, J., Gois, P., & Williamson, B. (2019). On the Information Advantage of Sidescan Sonar Three-Frequency Colour over Greyscale Imagery. Journal of Marine Science and Engineering, 7(8), 276. https://doi.org/10.3390/jmse7080276