The Effect of the Second-Order Wave Loads on Drift Motion of a Semi-Submersible Floating Offshore Wind Turbine


Abstract
:1. Introduction
2. Model Description
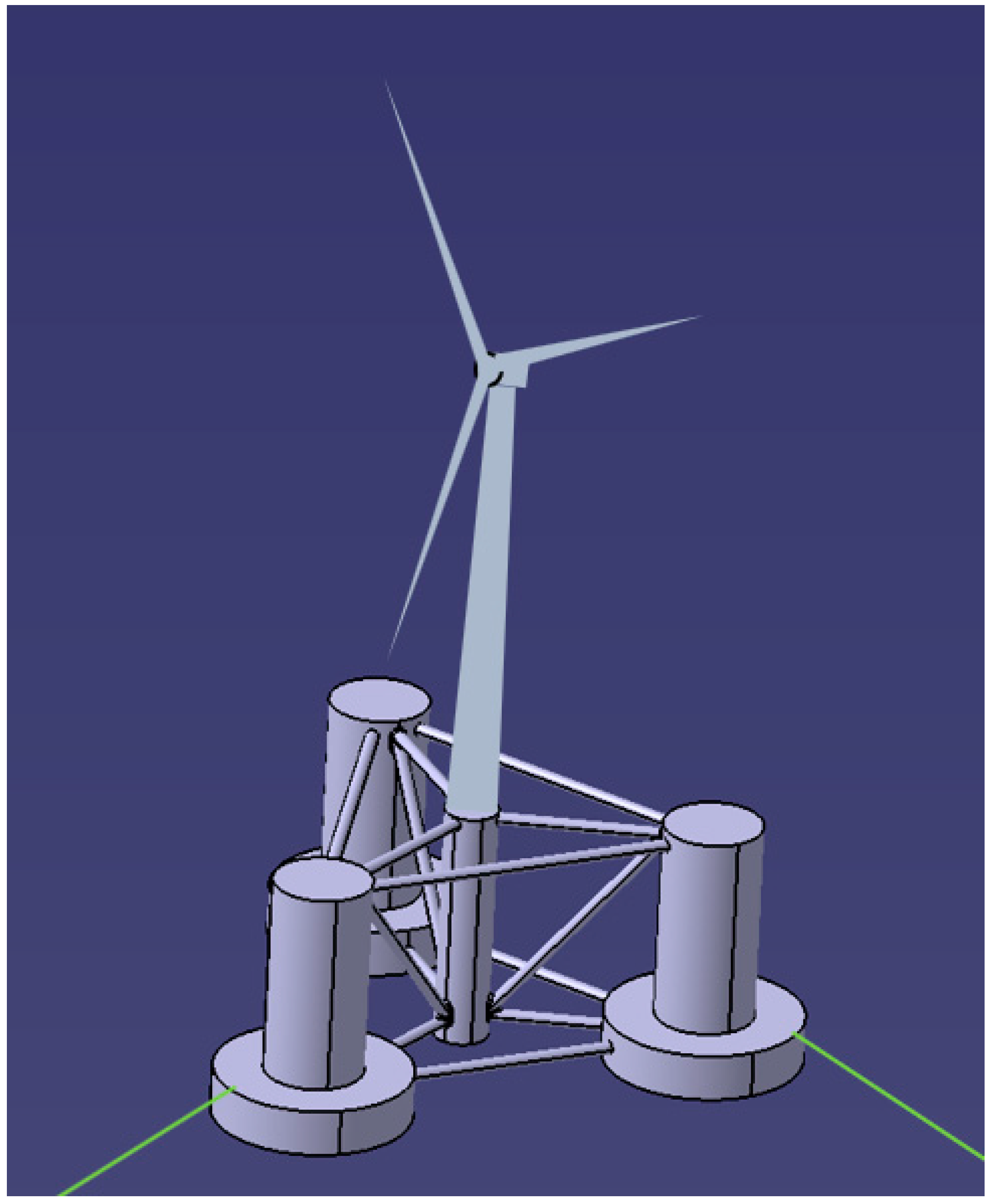
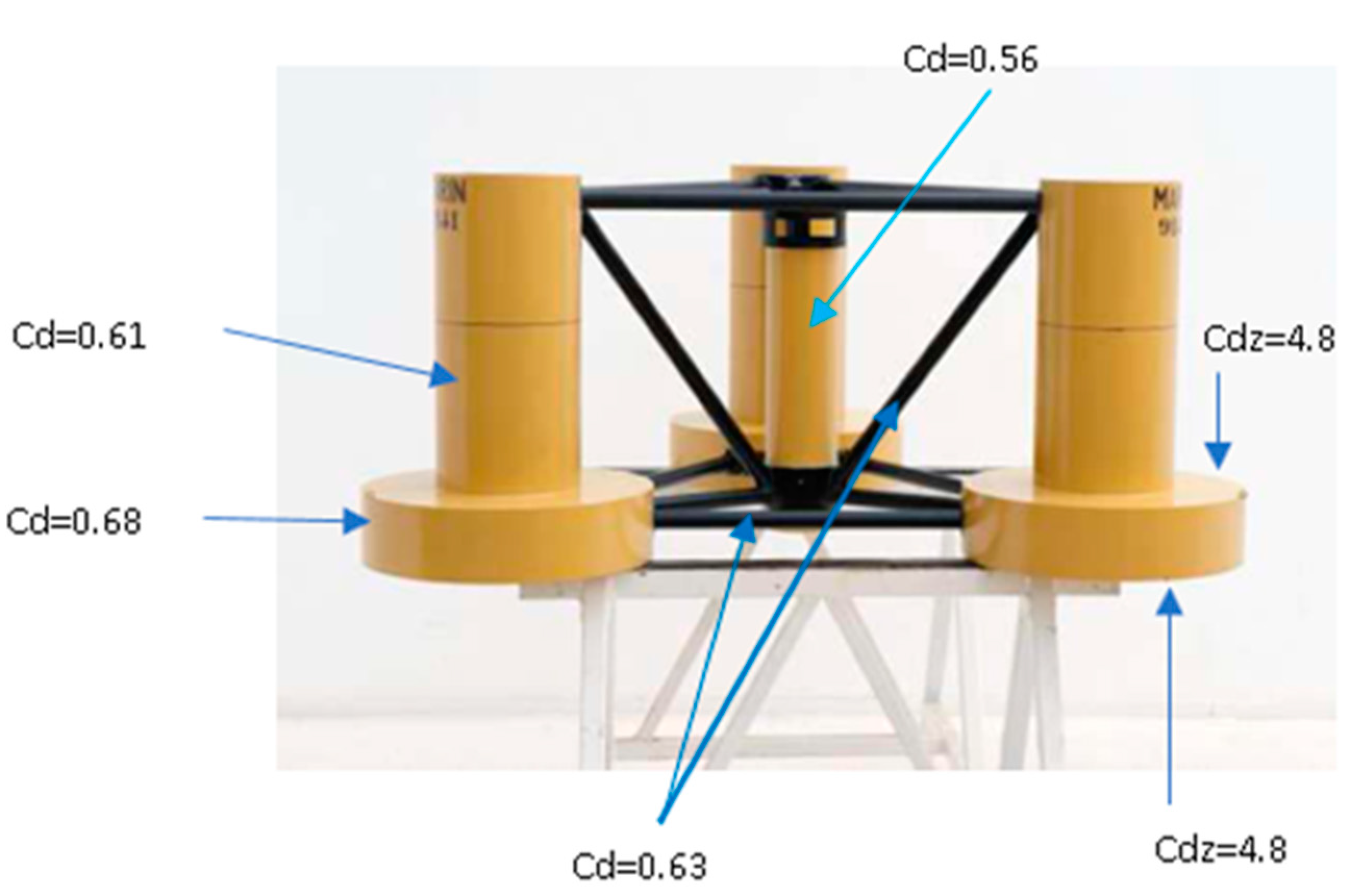
2.1. Model Test Model
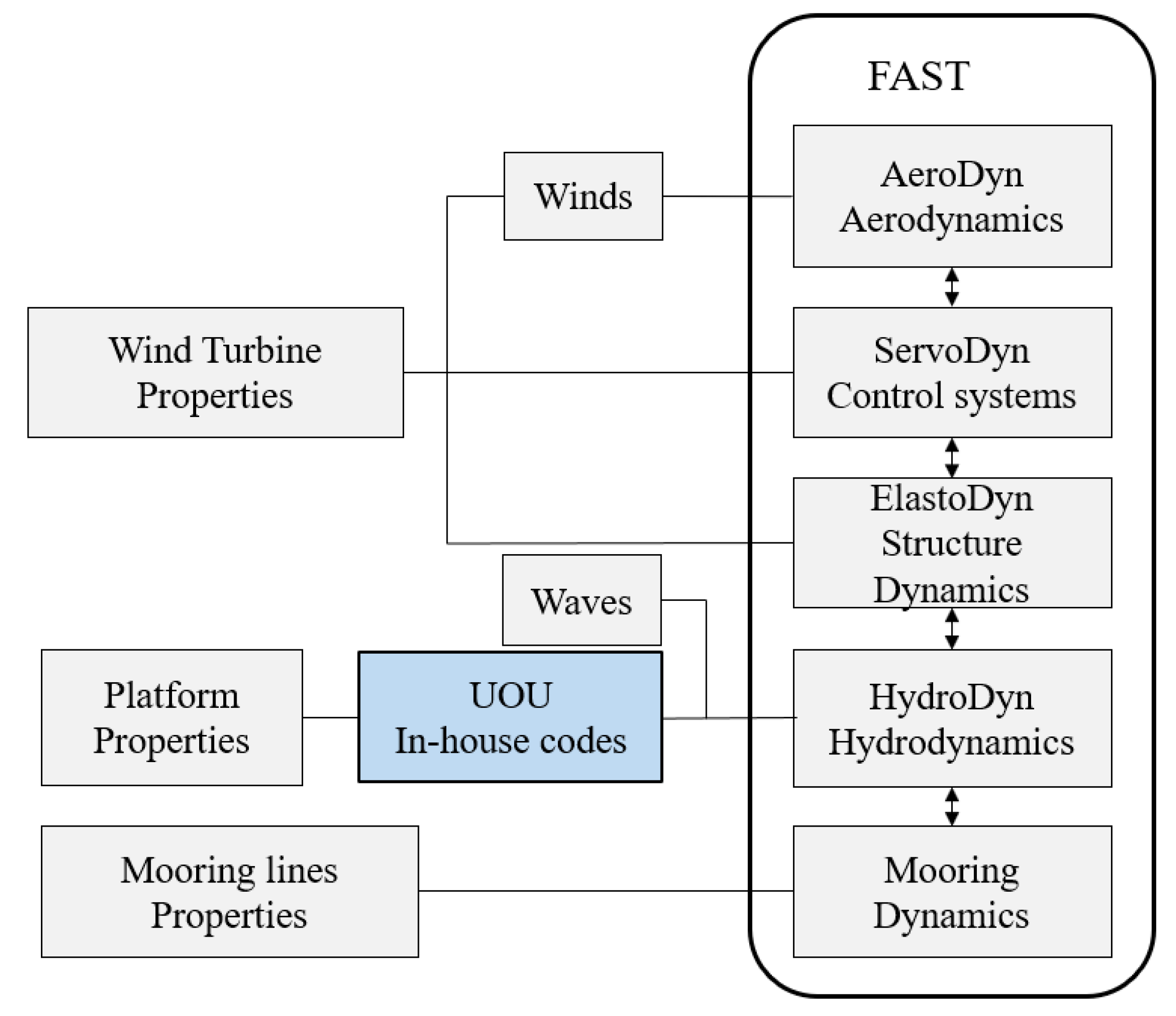
2.2. Numerical Simulation Model
3. Results
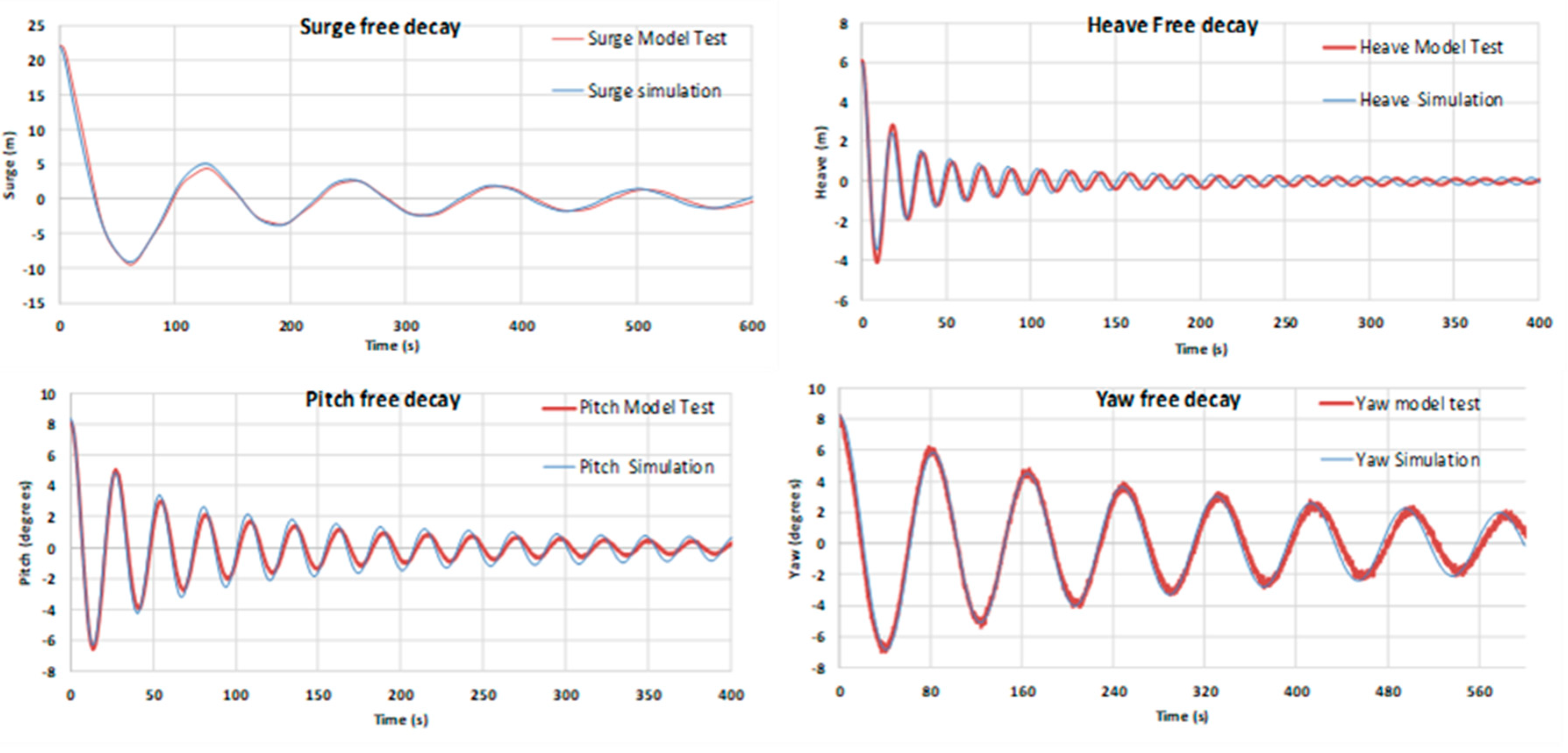
3.1. Free Decay Test
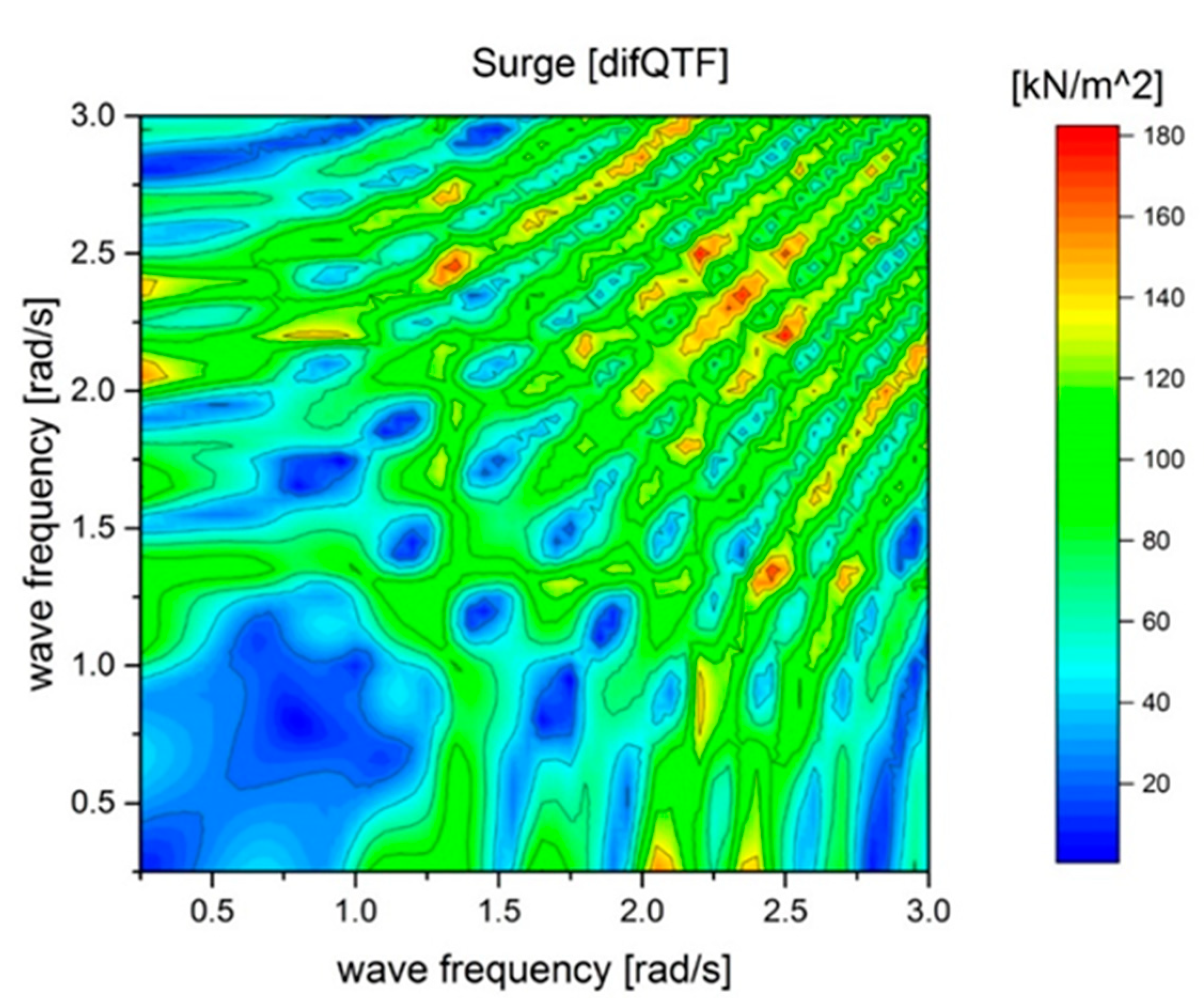
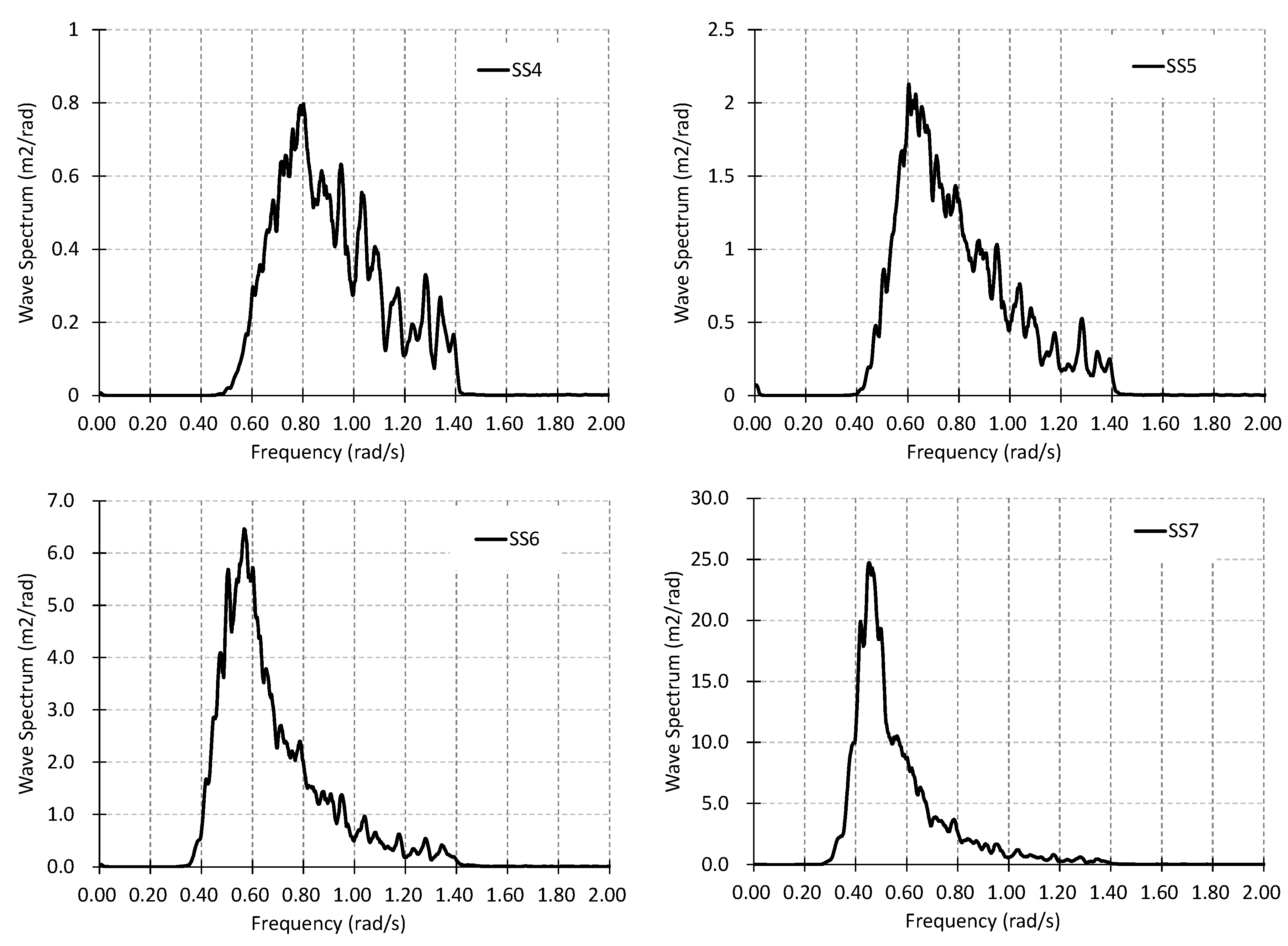
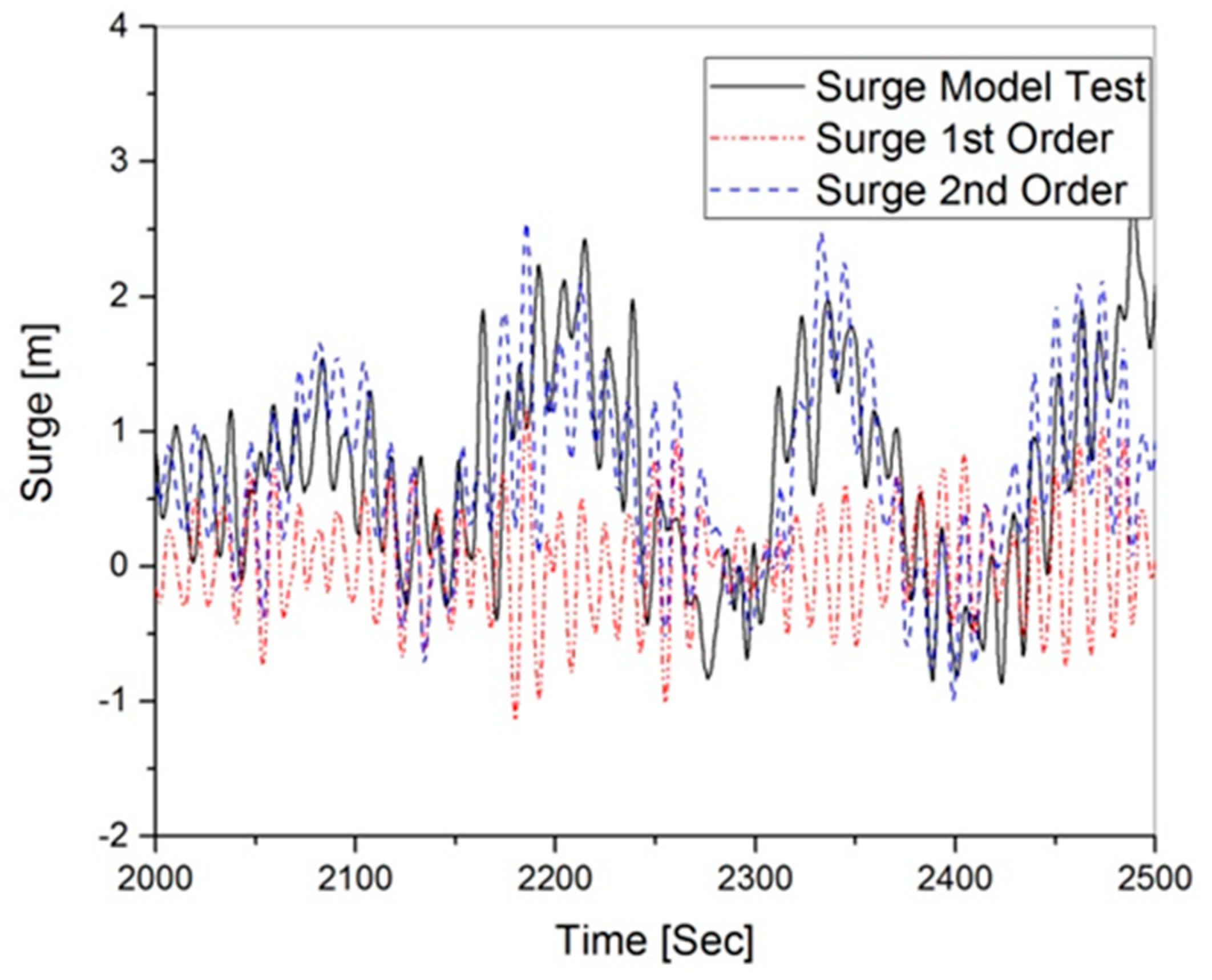
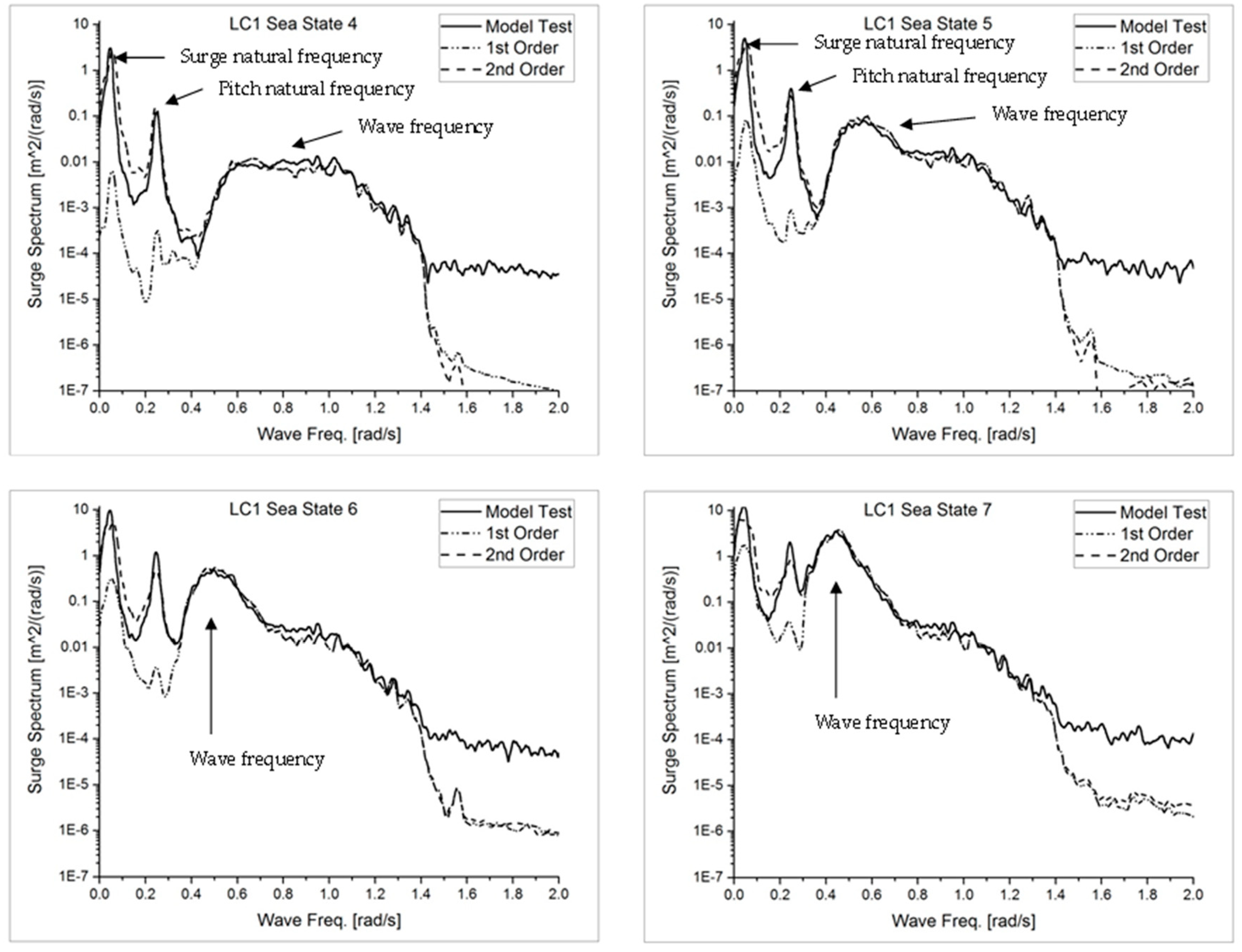
3.2. Drift Motion in Irregular Waves
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Musial, W.; Butterfield, S.; Ram, B. Energy From Offshore Wind. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2006. [Google Scholar]
- Roddier, D.; Cermelli, C.; Aubault, A.; Weinstein, A. WindFloat: A floating foundation for offshore wind turbines. J. Renew. Sustain. Energy 2010, 2, 33104. [Google Scholar] [CrossRef]
- Kvittem, M.I.; Berthelsen, P.A.; Eliassen, L.; Thys, M. Calibration of Hydrodynamic Coefficients for a Semi-Submersible 10 MW Wind Turbine. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Robertson, A.; Jonkman, J.; Masciola, M. Definition of the Semisubmersible Floating System for Phase II of OC4; National Renewable Energy Laboratory-NREL: Golden, CO, USA, 2014. [Google Scholar]
- Huijs, F.; de Bruijn, R.; Savenije, F. Concept Design Verification of a Semi-submersible Floating Wind Turbine Using Coupled Simulations. Energy Procedia 2014, 53, 2–12. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Li, S.; Yi, Q.; Chen, D. Developments in semi-submersible floating foundations supporting wind turbines: A comprehensive review. Renew. Sustain. Energy Rev. 2016, 60, 433–449. [Google Scholar] [CrossRef]
- Pham, T.D.; Shin, H. Validation of a 750kW semi-submersible floating offshore wind turbine numerical model with model test data, part I: Model-I. Int. J. Nav. Archit. Ocean Eng. 2019, 11, 980–992. [Google Scholar] [CrossRef]
- Bachynski, E.E.; Moan, T. Design considerations for tension leg platform wind turbines. Mar. Struct. 2012, 29, 89–114. [Google Scholar] [CrossRef]
- Oguz, E.; Clelland, D.; Day, A.H.; Incecik, A.; López, J.A.; Sánchez, G.; Almeria, G.G. Experimental and numerical analysis of a TLP floating offshore wind turbine. Ocean Eng. 2018, 147, 591–605. [Google Scholar] [CrossRef] [Green Version]
- Kausche, M.; Adam, F.; Dahlhaus, F.; Großmann, J. Floating offshore wind—Economic and ecological challenges of a TLP solution. Renew. Energy 2018, 126, 270–280. [Google Scholar] [CrossRef]
- Jonkman, J. Definition of the Floating System for Phase IV of OC3; Contract.1,31 2010; National Renewable Energy Lab.: Golden, CO, USA, 2010. [Google Scholar]
- Bredmose, H.; Lemmer, F.; Borg, M.; Pegalajar-Jurado, A.; Mikkelsen, R.F.; Larsen, T.S.; Fjelstrup, T.; Yu, W.; Lomholt, A.K.; Boehm, L.; et al. The Triple Spar campaign: Model tests of a 10MW floating wind turbine with waves, wind and pitch control. Energy Procedia 2017, 137, 58–76. [Google Scholar] [CrossRef] [Green Version]
- Utsunomiya, T.; Matsukuma, H.; Minoura, S.; Ko, K.; Hamamura, H.; Kobayashi, O.; Sato, I.; Nomoto, Y.; Yasui, K. On Sea Experiment of a Hybrid SPAR for Floating Offshore Wind Turbine Using 1/10 Scale Model. In Proceedings of the ASME 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, 6–11 June 2010; pp. 529–536. [Google Scholar]
- Shin, H.; Dam, P.T.; Jung, K.J.; Song, J.; Rim, C.; Chung, T. Model test of new floating offshore wind turbine platforms. Int. J. Nav. Archit. Ocean Eng. 2013, 5, 199–209. [Google Scholar] [CrossRef] [Green Version]
- Shin, H.; Lee, W.; Jung, K.; Kim, J. Model test and simulation of modified spar type floating offshore wind turbine with three catenary mooring lines. J. Renew. Sustain. Energy 2014, 6, 042009. [Google Scholar] [CrossRef]
- Jonkman, B.; Jonkman, J. FAST v8. Available online: https://nwtc.nrel.gov/FAST8 (accessed on 27 July 2016).
- Sintef Ocean Website. Available online: https://www.sintef.no/projectweb/nowitech/innovation/simo-riflex-trl7/ (accessed on 29 October 2020).
- HAWC2 Website. Available online: http://www.hawc2.dk/hawc2-info (accessed on 29 October 2020).
- DNV.GL. Available online: https://www.dnvgl.com/services/wind-turbine-design-software-bladed-3775 (accessed on 29 October 2020).
- Orcaflex Website. Available online: https://www.orcina.com/orcaflex/ (accessed on 29 October 2020).
- Kim, H.C.; Kim, M.H. Global performances of a semi-submersible 5MW wind-turbine including second-order wave-diffraction effects. Ocean Syst. Eng. 2015, 5, 139–160. [Google Scholar] [CrossRef]
- Couling, A.J.; Goupee, A.J.; Robertson, A.N.; Jonkman, J.M. Importance of Second-Order Difference-Frequency Wave-Diffraction Forces in the Validation of a Fast Semi-Submersible Floating Wind Turbine Model. In International Conference on Offshore Mechanics and Arctic Engineering; American Society of Mechanical Engineers: Nantes, France, 2013. [Google Scholar]
- Zhang, L.; Shi, W.; Karimirad, M.; Michailides, C.; Jiang, Z. Second-order hydrodynamic effects on the response of three semisubmersible floating offshore wind turbines. Ocean Eng. 2020, 207, 107371. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Laboratory-NREL: Golden, CO, USA, 2009. [Google Scholar]
- Jonkman, J.M. Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine; NREL/TP-500-41958; National Renewable Energy Lab.: Golden, CO, USA, 2007. [Google Scholar]
- Pinkster, J.A. Low Frequency Second Order Wave Exciting Forces on Floating Structures. Ph.D. Thesis, Delft University of Technology, Wageningen, The Netherlands, 1980. [Google Scholar]
- Catalano, P.; Wang, M.; Iaccarino, G.; Moin, P. Numerical simulation of the flow around a circular cylinder at high Reynolds numbers. Int. J. Heat Fluid Flow 2003, 24, 463–469. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Unit | Model Scale (1:80) | Full Scale |
|---|---|---|---|
| Water Depth | m | 2.5 | 200 |
| Turbine Capacity | MW | − | 5 |
| Rotor Mass | kg | 0.215 | 110,000 |
| Hub Mass | kg | 0.111 | 56,780 |
| Blade Mass | kg | 0.035 | 17,740 |
| Nacelle Mass | kg | 0.469 | 240,000 |
| Tower Height | m | 0.97 | 77.6 |
| Tower Mass | kg | 0.488 | 249,718 |
| Tower Top Diameter | m | 0.048 | 3.87 |
| Tower Base Diameter | m | 0.081 | 6.5 |
| Platform Length | m | 0.4 | 32 |
| Base Column Diameter | m | 0.3 | 24 |
| Upper Column Diameter | m | 0.15 | 12 |
| Main Column Diameter | m | 0.081 | 6.5 |
| Platform Mass | kg | 26.314 | 13,473,000 |
| Description | Unit | Full Scale | Target (1:80) | Measured | Difference |
|---|---|---|---|---|---|
| Platform Mass | kg | 13,473 × 103 | 26.31 | 25.78 | −2.031% |
| Roll Inertia | kg∙m2 | 6.827 × 109 | 2.083 | 2.01 | −3.505% |
| Pitch Inertia | kg∙m2 | 6.827 × 109 | 2.083 | 2.01 | −3.505% |
| Distance between Platform Bottom to Center of Gravity | m | 6.54 | 0.082 | 0.083 | 1.529% |
| Description | Unit | Full Scale | Model Scale 1:80 |
|---|---|---|---|
| Number of Mooring Lines | − | 3 | 3 |
| Depth to Fairleads below SWL | m | 14 | 0.175 |
| Un-stretched Mooring Line Length | m | 835.50 | 10.444 |
| Mooring Line Diameter | m | 0.077 | 0.001 |
| Equivalent Mass Density | kg/m | 113.35 | 0.0177 |
| Equivalent Weight in Water | N/m | 108.63 | 0.017 |
| Equivalent Extensional Stiffness | N | 753.6 × 106 | 1472 |
| Angle Between Adjacent Mooring Lines | Degree | 120 | 120 |
| Depth to Fairlead below SWL | m | 14 | 0.175 |
| Depth to Anchors below SWL | m | 200 | 2.5 |
| Radius from Platform Center-line to Fairleads | m | 40.87 | 0.511 |
| Radius from Platform Center-line to Anchors | m | 837.60 | 10.470 |
| Load Cases | Sea State (SS) | Full Scale | Model Scale (1:80) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Irregular Wave (JONSWAP) | Wind Speed | Rotor Speed | Irregular Wave (JONSWAP) | Wind Speed | Rotor Speed | ||||
| Hs(m) | Tp(s) | (m/s) | (rpm) | Hs(m) | Tp(s) | (m/s) | (rpm) | ||
| LC1 | SS4 | 2.44 | 8.1 | 0 | 0 | 0.031 | 0.906 | 0 | Fixed |
| SS5 | 3.66 | 9.7 | 0 | 0 | 0.046 | 1.084 | 0 | Fixed | |
| SS6 | 5.49 | 11.3 | 0 | 0 | 0.069 | 1.263 | 0 | Fixed | |
| SS7 | 9.14 | 13.6 | 0 | 0 | 0.114 | 1.521 | 0 | Fixed | |
| LC2 | SS4 | 2.44 | 8.1 | 11.4 | 12.1 | 0.031 | 0.906 | 2.4 | 108.2 |
| SS5 | 3.66 | 9.7 | 11.4 | 12.1 | 0.046 | 1.084 | 2.4 | 108.2 | |
| SS6 | 5.49 | 11.3 | 11.4 | 12.1 | 0.069 | 1.263 | 2.4 | 108.2 | |
| SS7 | 9.14 | 13.6 | 11.4 | 12.1 | 0.114 | 1.521 | 2.4 | 108.2 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pham, T.-D.; Shin, H. The Effect of the Second-Order Wave Loads on Drift Motion of a Semi-Submersible Floating Offshore Wind Turbine. J. Mar. Sci. Eng. 2020, 8, 859. https://doi.org/10.3390/jmse8110859
Pham T-D, Shin H. The Effect of the Second-Order Wave Loads on Drift Motion of a Semi-Submersible Floating Offshore Wind Turbine. Journal of Marine Science and Engineering. 2020; 8(11):859. https://doi.org/10.3390/jmse8110859
Chicago/Turabian StylePham, Thanh-Dam, and Hyunkyoung Shin. 2020. "The Effect of the Second-Order Wave Loads on Drift Motion of a Semi-Submersible Floating Offshore Wind Turbine" Journal of Marine Science and Engineering 8, no. 11: 859. https://doi.org/10.3390/jmse8110859