Accurate Depth Inversion Method for Coastal Bathymetry: Introduction of Water Wave High-Order Dispersion Relation

Abstract
:1. Introduction
2. Wavenumber Coupling Equation and High-Order Dispersion Relation
2.1. Fredholm’s Alternative Theorem (FAT)
2.2. Wavenumber and Velocity Potential Coupling Equation
2.3. New High-Order Dispersion Relation Formulation
3. Verification of High-Order Dispersion Relation Model
3.1. Numerical Solution Procedure
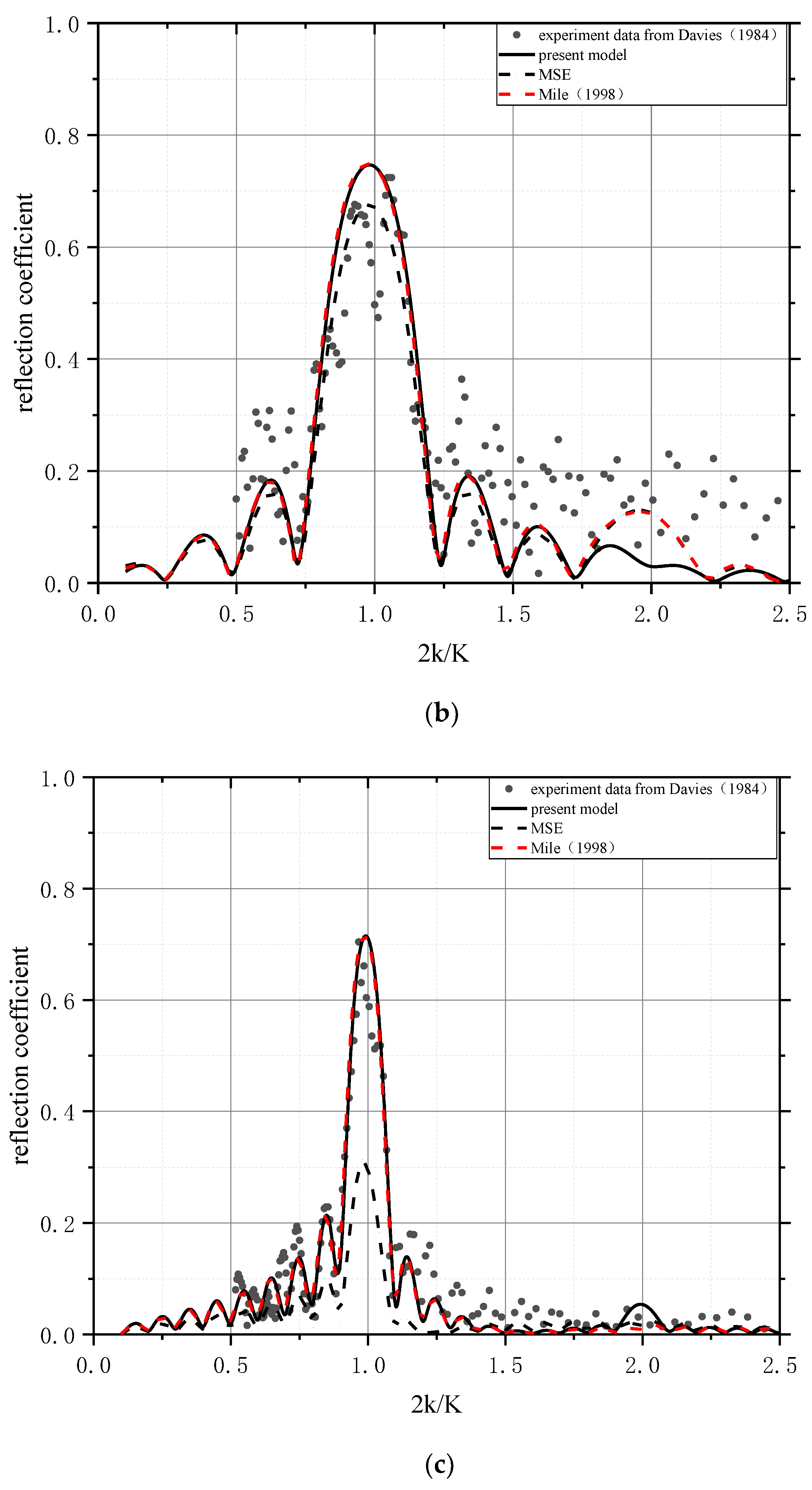
3.2. Numerical Results vs. Experiment Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Liang, B.C.; Wu, G.X.; Liu, F.S.; Fan, H.R.; Li, H.J. Numerical study of wave transmission over double submerged breakwaters using non-hydrostatic wave model. Oceanologia 2015, 57, 308–317. [Google Scholar] [CrossRef] [Green Version]
- Liang, B.C.; Shao, Z.X.; Wu, G.X.; Shao, M.; Sun, J.W. New equations of wave energy assessment accounting for the water depth. Appl. Energy 2017, 188, 130–139. [Google Scholar] [CrossRef]
- Shao, Z.X.; Liang, B.C.; Li, H.J.; Wu, G.X.; Wu, Z.H. Blended wind fields for wave modeling of tropical cyclones in the South China Sea and East China Sea. Appl. Ocean Res. 2018, 71, 20–33. [Google Scholar] [CrossRef]
- Liang, B.C.; Shao, Z.X. An automated threshold selection method based on the characteristic of extrapolated significant wave heights. Coast. Eng. 2019, 144, 22–32. [Google Scholar] [CrossRef]
- Liu, G.J.; Li, H.Y.; Qiu, Z.Z.; Leng, D.X.; Li, Z.X.; Li, W.H. A mini review of recent progress on vortex-induced vibrations of marine risers. Ocean Eng. 2019. [Google Scholar] [CrossRef]
- Yan, Z.D.; Liang, B.C.; Wu, G.X.; Wang, S.Q.; Li, P. Ultra-long return level estimation of extreme wind speed based on the deductive method. Ocean Eng. 2019. [Google Scholar] [CrossRef]
- Wu, G.X.; Shi, F.Y.; Kirby, J.T.; Liang, B.C.; Shi, J. Modeling wave effects on storm surge and coastal inundation. Coast. Eng. 2018, 140, 371–382. [Google Scholar] [CrossRef]
- Cheng, L.; Ma, L.; Cai, W.T.; Tong, L.H.; Li, M.C.; Du, P.L. Integration of Hyperspectral Imagery and Sparse Sonar Data for Shallow Water Bathymetry Mapping. Trans. Geosci. Remote Sens. 2015, 53, 3235–3249. [Google Scholar] [CrossRef]
- Bergsma, E.W.J.; Conley, D.C.; Davidson, M.A.; O’Hare, T.J. Video-based nearshore bathymetry estimation in macro-tidal environments. Mar. Geol. 2016, 374, 31–41. [Google Scholar] [CrossRef] [Green Version]
- Hodúl, M.; Bird, S.; Knudby, A.; Chénier, B. Satellite derived photogrammetric bathymetry. ISPRS J. Photogramm. Remote Sens. 2018, 142, 268–277. [Google Scholar] [CrossRef]
- Rutten, J.; Steven, M.J.; Ruessink, G. Accuracy of Nearshore Bathymetry Inverted from X-Band Radar and Optical Video Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1106–1116. [Google Scholar] [CrossRef]
- Lu, T.Q.; Chen, S.B.; Tu, Y.; Yu, Y.; Cao, Y.J.; Jiang, D.Y. Comparative study on coastal depth inversion based on multi-source remote sensing data. Chin. Geogr. Sci. 2019, 29, 192–201. [Google Scholar] [CrossRef] [Green Version]
- Vyas, N.K.; Andharia, H.I. Coastal Bathymetric Studies from Space Imagery. Mar. Geod. 1988, 12, 177–187. [Google Scholar] [CrossRef]
- Catálan, P.A.; Haller, M.C. Remote sensing of breaking wave phase speeds with application to non-linear depth inversions. Coast. Eng. 2008, 55, 93–111. [Google Scholar] [CrossRef]
- Holland, K.T.; Lalejini, D.M.; Spansel, S.D.; Holman, R.A. Littoral environmental reconnaissance using tactical imaging from unmanned aircraft systems. In Proceedings of the SPIE Ocean Sensing and Monitoring II, Bellingham, WA, USA, April 2010; SPIE: Bellingham, WA, USA, 2010; Volume 7678. [Google Scholar]
- Yoo, J.; Fritz, H.M.; Haas, K.A.; Work, P.A.; Barnes, C.F. Depth Inversion in the Surf Zone with Inclusion of Wave Nonlinearity Using Video-Derived Celerity. J. Waterw. Port Coast. Ocean Eng. 2011, 137, 95–106. [Google Scholar] [CrossRef]
- Holman, R.A.; Holland, K.T.; Lalejini, D.M.; Spansel, S.D. Surfzone characterization from unmanned aerial vehicle imagery. Ocean Dyn. 2011, 61, 1927–1935. [Google Scholar] [CrossRef]
- Rob, H.; Nathaniel, P.; Todd, H. cBathy: A robust algorithm for estimating nearshore bathymetry. J. Geophys. Res. 2013, 118, 2595–2609. [Google Scholar]
- Sun, S.H.; Chuang, W.L.; Chang, K.A.; ASCE, M.; Kim, J.Y.; Kaihatu, J.; ASCE, A.M.; Huff, T.; Feagin, R. Imaging-Based Nearshore Bathymetry Measurement Using an Unmanned Aircraft System. J. Waterw. Port Coast. Ocean Eng. 2019, 145, 04019002. [Google Scholar] [CrossRef]
- Tissier, M.; Bonneton, P.; Almar, R.; Castelle, B.; Bonneton, N.; Nahon, A. Field measurements and non-linear prediction of wave celerity in the surf zone. Eur. J. Mech. B/Fluids 2001, 30, 635–641. [Google Scholar] [CrossRef]
- Holman, R.A.; Brodie, K.L.; Spore, N.J. Surf Zone Characterization using a Small Quadcopter: Technical Issues and Procedures. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2017–2027. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, Q.; Zheng, J.; Demirbilek, Z. Parameterization of nearshore wave front slope. Coast. Eng. 2017, 127, 80–87. [Google Scholar] [CrossRef]
- Tang, J.; Shen, S.D.; Wang, H. Numerical Model for Coastal Wave Propagation through Mild Slope Zone in the Presence of Rigid Vegetation. Coast. Eng. 2015, 97, 53–59. [Google Scholar] [CrossRef]
- Ma, Y.X.; Chen, H.Z.; Ma, X.Z.; Dong, G.H. A numerical investigation on nonlinear transformation of obliquely incident random waves on plane sloping bottoms. Coast. Eng. 2017, 130, 65–84. [Google Scholar] [CrossRef]
- Dong, G.H.; Chen, H.Z.; Ma, Y.X. Parameterization of nonlinear coastal water waves over slope bottoms. Coast. Eng. 2014, 94, 23–32. [Google Scholar] [CrossRef]
- Román, R.; Mayra, A.; Ellis, J.T. A synthetic review of remote sensing applications to detect nearshore bars. Mar. Geol. 2019, 408, 144–153. [Google Scholar] [CrossRef]
- Ehrenmark, U.T. An alternative dispersion equation for water waves over an inclined bed. J. Fluid Mech. 2005, 543, 249–266. [Google Scholar] [CrossRef]
- Beji, S. Improved explicit approximation of linear dispersion relation foe gravity waves. Coast. Eng. 2013, 73, 149–160. [Google Scholar] [CrossRef]
- Zhang, L.; Edge, B.L. A note on Application of the mild-slope equation for random waves. J. Coast. Res. 1998, 14, 604–609. [Google Scholar]
- Yu, J.; Howard, L.N. On higher order Bragg resonance of water waves by bottom corrugations. J. Fluid Mech. 2010, 659, 249–266. [Google Scholar] [CrossRef]
- Yu, J.; Howard, L.N. Exact Floquet theory for waves over arbitrary periodic topographies. J. Fluid Mech. 2012, 712, 451–470. [Google Scholar] [CrossRef]
- Zhang, L.B.; Kim, M.H.; Zhang, J.; Edge, B.L. Hybrid Model for Bragg Scattering of Water Waves by Steep Multiply-sinusoidal Bars. J. Coast. Res. 1999, 15, 486–495. [Google Scholar]
- Friedman, B. Principles and Techniques of Applied Mathematics; John and Wiley and Sons Inc.: Hoboken, NJ, USA, 1956; p. 150. [Google Scholar]
- Garabedian, P.R. Partial Differential Equation; John and Wiley and Sons Inc.: Hoboken, NJ, USA, 1963; p. 359. [Google Scholar]
- Liu, L.F.; Dingemans, M.W. Derivation of the third-order evolution equations for weakly nonlinear water waves propagating over uneven bottoms. Wave Motion. 1989, 11, 41–64. [Google Scholar] [CrossRef]
- Suh, K.D.; Park, J.K.; Park, W.S. Wave reflection from partially perforated-wall caisson breakwater. Ocean Eng. 2006, 33, 264–280. [Google Scholar] [CrossRef] [Green Version]
- Kirby, J.T. A general wave equation for waves over rippled beds. J. Fluid Mech. 1986, 162, 171–186. [Google Scholar] [CrossRef] [Green Version]
- Reddy, J.N. An Introduction to the Finite Element Method, 2nd ed.; McGraw-Hill Inc.: New York, NY, USA, 1993; pp. 35–51. [Google Scholar]
- Davies, A.G.; Heathershaw, A.D. Surface wave propagation over sinusoidally varying topography. J. Fluid Mech. 1984, 144, 419–443. [Google Scholar] [CrossRef]
- Miles, J.W.; Chamberlain, P.G. Topographical scattering of gravity waves. J. Fluid Mech. 1998, 361, 175–188. [Google Scholar] [CrossRef]
- Athanassoulis, G.A.; Belibassakis, K.A. A consistent coupled-mode theory for the propagation of small-amplitude water waves over variable bathymetry regions. J. Fluid Mech. 1999, 389, 275–301. [Google Scholar] [CrossRef] [Green Version]
- Hsu, T.W.; Tsai, L.H.; Huang, Y.T. Bragg scattering of water waves by multiply composite artificial bars. Coast. Eng. J. 2003, 45, 235–253. [Google Scholar] [CrossRef]
- Baka, A.S.; Brodiea, K.L.; Hesserb, T.J.; Smith, M.J. Applying dynamically updated nearshore bathymetry estimates to operational nearshore wave modelling. Ocean Eng. 2019, 145, 53–64. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | (a) | (b) | (c) |
|---|---|---|---|
| number of ripples n | 2 | 4 | 10 |
| mean water depth (cm) | 15.6 | 15.6 | 31.3 |
| amplitude of ripples B (cm) | 5 | 5 | 5 |
| wavelength of ripples L (cm) | 100 | 100 | 100 |
| Items | (a) | (b) | (c) |
|---|---|---|---|
| Correlation Coefficient | 0.857 | 0.924 | 0.965 |
| Water Depth (cm) | 10.0 | 15.6 | 20.0 | 30.0 | |
|---|---|---|---|---|---|
| Linear dispersion relation | wavenumber (k) | 6.802 | 5.675 | 5.183 | 4.576 |
| wavelength (L) | 0.923 | 1.107 | 1.212 | 1.372 | |
| High-order dispersion relation | wavenumber (k) | 6.697 | 5.679 | 5.424 | 4.639 |
| wavelength (L) | 0.932 | 1.106 | 1.198 | 1.375 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, H.; Liu, H.; Zhang, L. Accurate Depth Inversion Method for Coastal Bathymetry: Introduction of Water Wave High-Order Dispersion Relation. J. Mar. Sci. Eng. 2020, 8, 153. https://doi.org/10.3390/jmse8030153
Ge H, Liu H, Zhang L. Accurate Depth Inversion Method for Coastal Bathymetry: Introduction of Water Wave High-Order Dispersion Relation. Journal of Marine Science and Engineering. 2020; 8(3):153. https://doi.org/10.3390/jmse8030153
Chicago/Turabian StyleGe, Hongli, Hao Liu, and Libang Zhang. 2020. "Accurate Depth Inversion Method for Coastal Bathymetry: Introduction of Water Wave High-Order Dispersion Relation" Journal of Marine Science and Engineering 8, no. 3: 153. https://doi.org/10.3390/jmse8030153