Electronic Navigational Charts: International Standards and Map Projections


Abstract
:1. Introduction
- The detection and presentation of the consequences of the lack of international standards on the employment of map projections in ECDIS.
- The identification of a reasonable set of suitable map projections for the display of ENCs in ECDIS.
- The proposal of simple selection/implementation rules, that can be easily used by both ECDIS manufacturers and users.
2. International Standards for ENCs and Manufacturer’s Practice on the Employment of Map Projections in ECDIS
2.1. ENC and ECDIS Definitions, Standards and Procedures
2.1.1. ENC and ECDIS Official Definitions
- “Electronic Chart Display and Information System (ECDIS) is a navigation information system which with adequate back-up arrangements can be accepted as complying with the up-to-date chart required by regulations V/19 and V/27 of the 1974 SOLAS Convention, as amended, by displaying selected information from a system electronic navigational chart (SENC) with positional information from navigation sensors to assist the mariner in route planning and route monitoring, and if required display additional navigation-related information.
- “Electronic Navigational Chart (ENC) means the database, standardized as to content, structure and format, issued for use with ECDIS by or on the authority of a Government, authorized Hydrographic Office or other relevant government institution, and conforms to IHO standards. The ENC contains all the chart information necessary for safe navigation and may contain supplementary information in addition to that contained in the paper chart which may be considered necessary for safe navigation”.
- System electronic navigational chart (SENC) means a database, in the manufacturers internal ECDIS format, resulting from the lossless transformation of the entire ENC contents and its updates. It is this database that is accessed by ECDIS for the display generation and other navigational functions, and is equivalent to an up-to-date paper chart. The SENC may also contain information added by the mariner and information from other sources. Each ECDIS software manufacturer has its own SENC format.
2.1.2. International Standards for ENC and ECDIS
- International Hydrographic Organization (IHO): numbers S-101 to S-199.
- International Association of Light Authorities (IALA): numbers S-201 to S-299.
- Intergovernmental Oceanographic Commission (IOC): numbers S-301 to S-399.
- Joint Technical Commission for Oceanography and Marine Meteorology (WMO/IOC JCOMM): numbers S-411 to S412.
- International Electrotechnical Commission–Technical Committee 80 (IEC-TC80): numbers S-421 to S-430.
- NATO Geospatial Maritime Working Group (GMWG) for Additional Military Layers (AML) for operational use in WECDIS (Warship Electronic Chart and Display Systems): numbers S-501 to 525.
2.1.3. Dissemination of ENCs, Worldwide Electronic Navigational Chart Data Base and IHO Data Protection Scheme
- Primar, based in Norway
- IC-ENC, based in the United Kingdom, and
- IC-ENC, based in Australia.
2.2. Manufacturer’s Practice on the Employment of Map Projections in ECDIS
3. Methodology of the Present Study
- -
- Derivation of an initial list of candidate projections.
- -
- Evaluation and ranking of candidate projections.
3.1. Identification of Candidate Map Projections for the Display of ENCs in ECDIS
- The principle that the selection method should consider user preferences and aesthetics (principle #8 of Table 1). In the case of ENCs, the user (navigator) is accustomed to the use of the Mercator projection used in traditional paper nautical charts.
- The proposed election/implementation rules have to be simple and straightforward ECDIS because ECDIS users (navigators) are not GIS experts or professional cartographers capable of making selection decisions that in some cases are difficult, even for experienced cartographers and GIS experts [30,31].
3.2. Principles and Methodology for the Evaluation of Candidate Map Projections for ECDIS
- The calculation and analysis of the distribution of angular and area distortions.
- The assessment of the shape of long navigational paths.
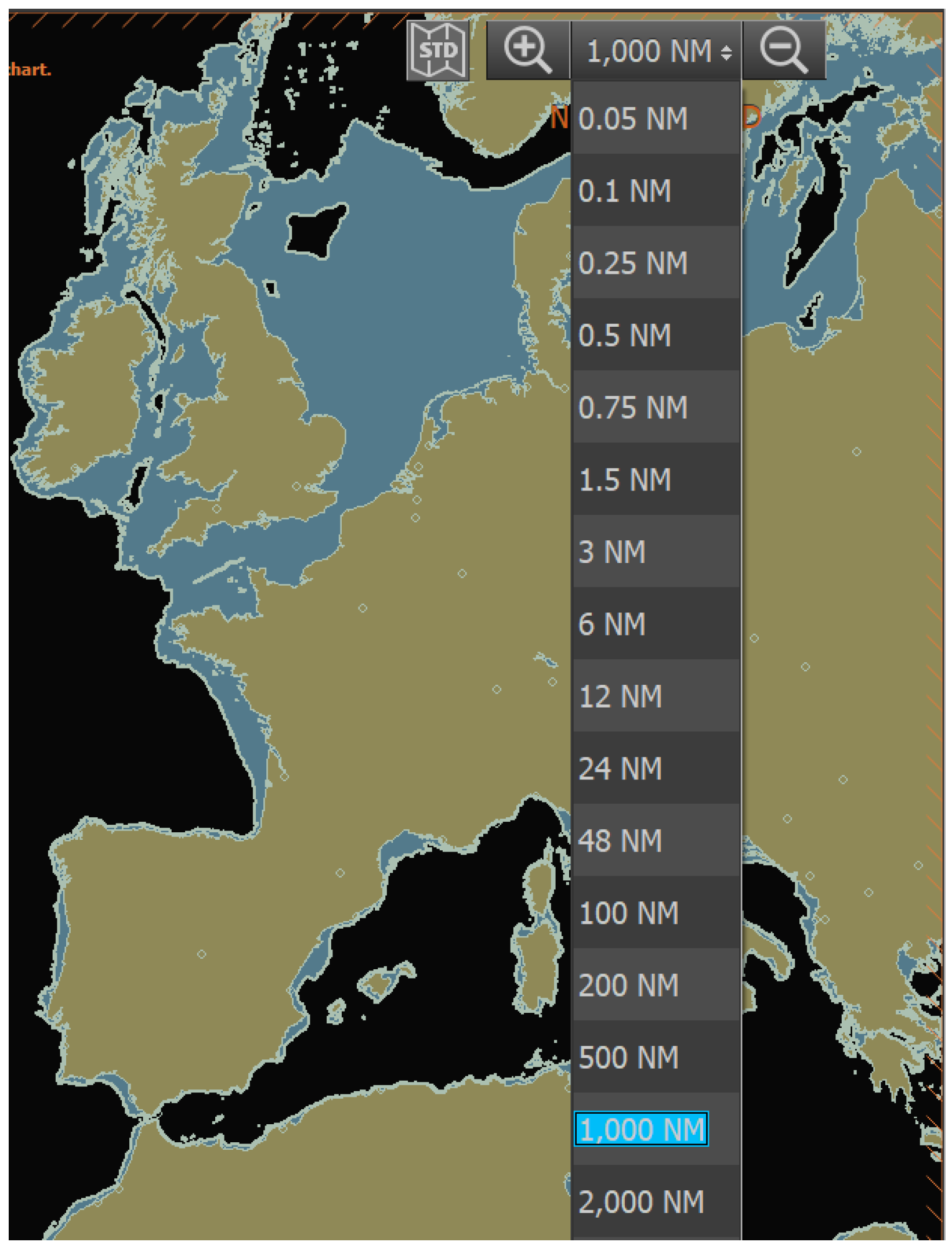
3.3. Exploitation of “Range Scale” for the Selection of Map Projections in ECDIS
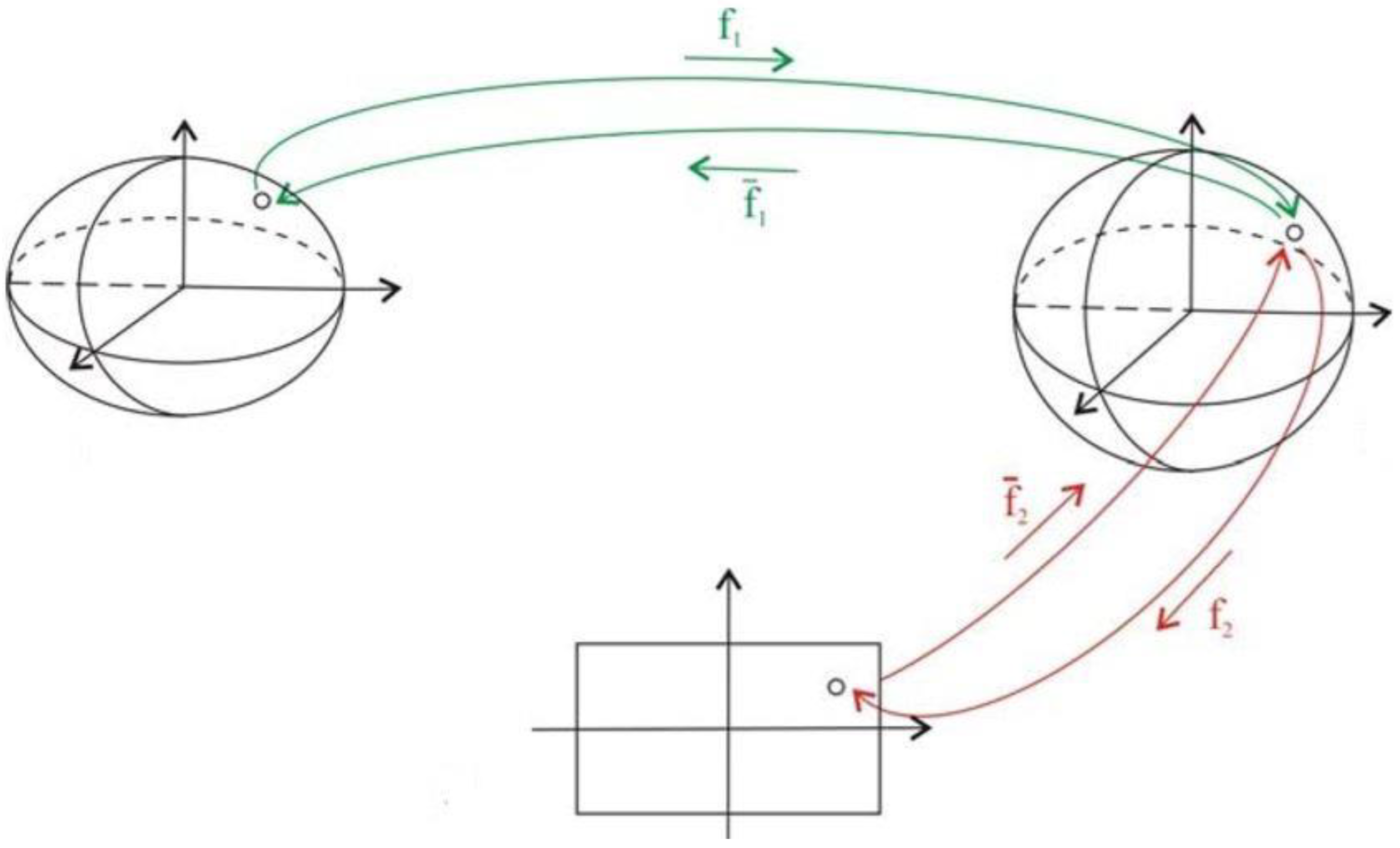
3.4. Developing Map Projections on the Ellipsoid for ECDIS by the Bijective Double Projection Transformation
- Transformation onto a “conformal sphere” without angle distortion.
- Transformation onto an “equivalent sphere” without area distortion.
- Transformation onto an “equidistant along the meridians sphere” without length distortion along the meridians.
- Transformation onto an “equidistant along a certain parallel sphere” without length distortion along this parallel.
- -
- φ: is the geodetic latitude of a point on the surface of the ellipsoid
- -
- φ΄, λ΄: are the auxiliary spherical latitude and the auxiliary spherical longitude of a point on the surface of the auxiliary sphere
- -
- The map transformation formulas are more straightforward than those for the other auxiliary spheres.
- The magnitude of angle and area distortion is negligible for the effect on visual perception on the ECDIS screen.
4. Evaluation of Candidate Map Projections for ECDIS
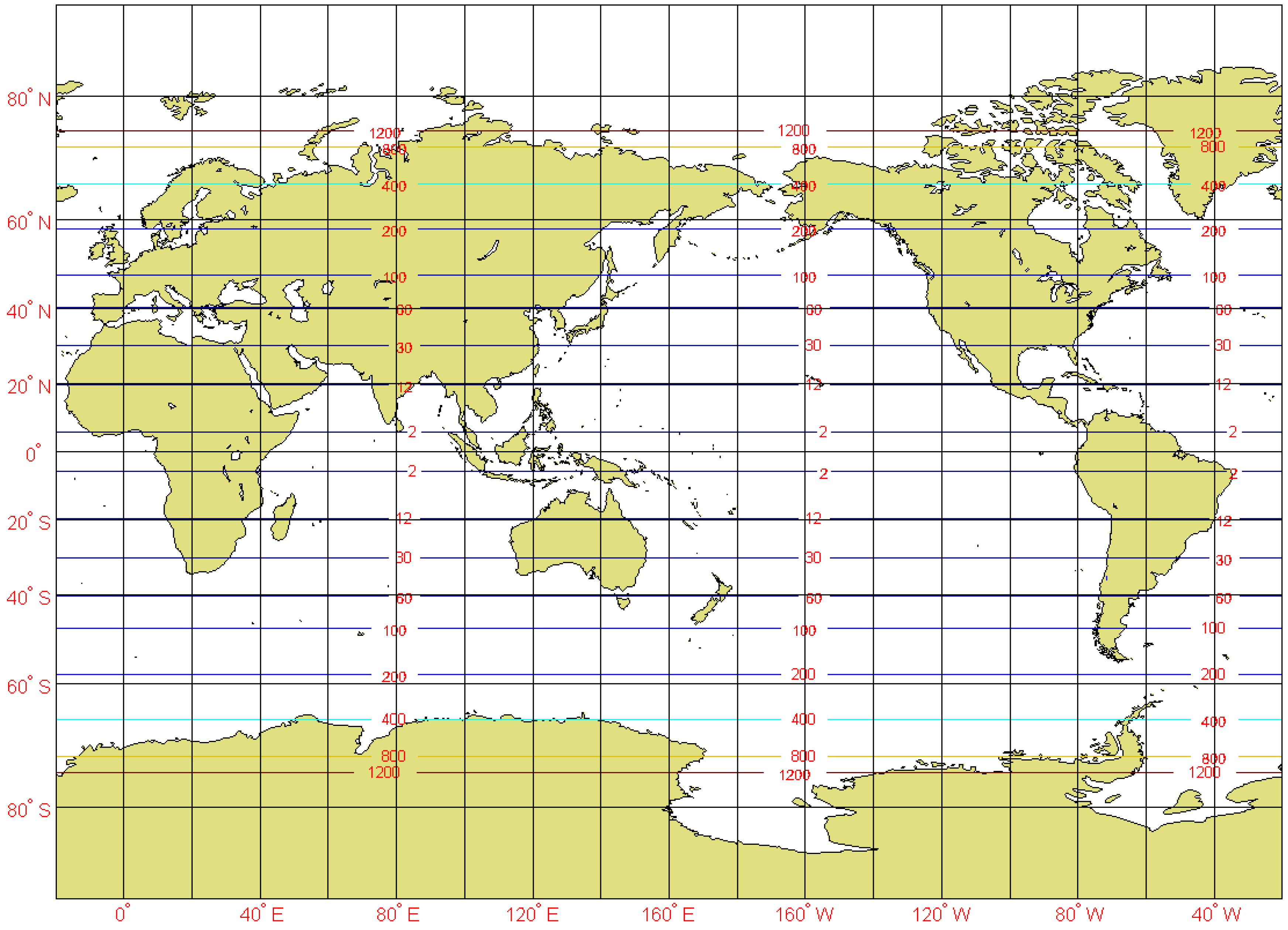
4.1. Distortion Analysis
- The Mercator projection, has zero angle distortion and provides optimum distribution of area distortion (≤12%) over a broad and continuous latitude zone extending from 24° S to 24° N, when the standard parallels are at latitudes 15° S and 15° N.
- The cylindrical equidistant projection provides optimum distribution of distortion when the standard parallels are at latitudes 30° S and 30° N. With these standard parallels the cylindrical equidistant projection has the following characteristics:
- ▪
- Satisfies the desired tolerances of angle distortion for reduced visual distortion (12°) over a broad and continuous latitude zone extending from 45° S to 45° N. In this latitude zone (−45°, 45°) the cylindrical equidistant projection with standard parallel at latitude 30°, provides considerably less area distortion compared to the Mercator projection. The magnitude of area distortion is −13.4% at the equator and 22.7 % at latitude 45°. The Mercator projection with the same standard parallel at latitude 30° provides −25% area distortion on the equator and 49.5 % area distortion at latitude 45°.
- ▪
- Satisfies the desired tolerances of area distortion for reduced visual distortion (± 12%) over a broad and continuous latitude zone extending from 10° to 39°. It is noted though that for latitude lower than 10° the maximum value of area distortion is only 13.4% at the equator, which is only 1.4% in excess of the desired tolerance (±12%).
- ▪
- Practically satisfies both desired tolerances of angular distortion and of area distortion over the latitudes zone from −39° to 39°, with only a small (1.4%) excess of the tolerance for area distortion for latitudes lower than 10°.
- The cylindrical equal area projection provides considerable angle distortion and therefore is not recommended for use in ECDIS and other electronic chart systems.
- The cylindrical stereographic projection with standard parallels at latitudes 30° S and 30° N known as BASM (Bol’soy Sovetskiy Atlas Mira) projection [40], satisfies the desired tolerances of angular distortion for reduced visual distortion (12°) over a latitude zone ex-tending from 53° S to 53° N. This projection has area distortion −19% at the equator and 67% at latitude 53°. The Mercator projection with the same standard parallel at latitude 30° provides −25% area distortion on the equator and a 06 % area distortion at latitude 53°.
- The cylindrical stereographic projection with standard parallels at latitudes 45° S and 45° N known as Gall cylindrical projection [40], satisfies the desired tolerances of angle distortion for reduced visual distortion (12°) over a latitude zone extending from 59° S to 59° N. This projection has area distortion −39.2% at the equator and 54.2% at latitude 59°. The Mercator projection with the same standard parallel at latitude 45° provides −50% area distortion on the equator and 87.6% area distortion at latitude 59°.
- The miller cylindrical projection satisfies the desired tolerances of angle distortion for reduced visual distortion (12°) over a latitude zone extending from 53° S to 53° N. This projection has an area distortion of −0.7% on the equator and 125.6% at latitude 53°. At this latitude (53°) the Mercator projection has an area distortion of 175%.
- The proposed miller cylindrical modified projection at latitude 30° satisfies the desired tolerances of angle distortion for reduced visual distortion (12°) over a latitude zone extending from 63.5° S to 63.5° N. This projection has area distortion −12.8% on the equator and 307.5% at latitude 63.5°. The Mercator projection with the same standard parallel has area distortion −25% at the equator and 375% at latitude 63.5°
- The polar azimuthal equidistant projection provides zero or less visual distortion in areas extending from the pole down to the 75° parallel.
- The polar azimuthal stereographic projection provides zero or less visual distortion in areas extending from the pole down to the 82° parallel.
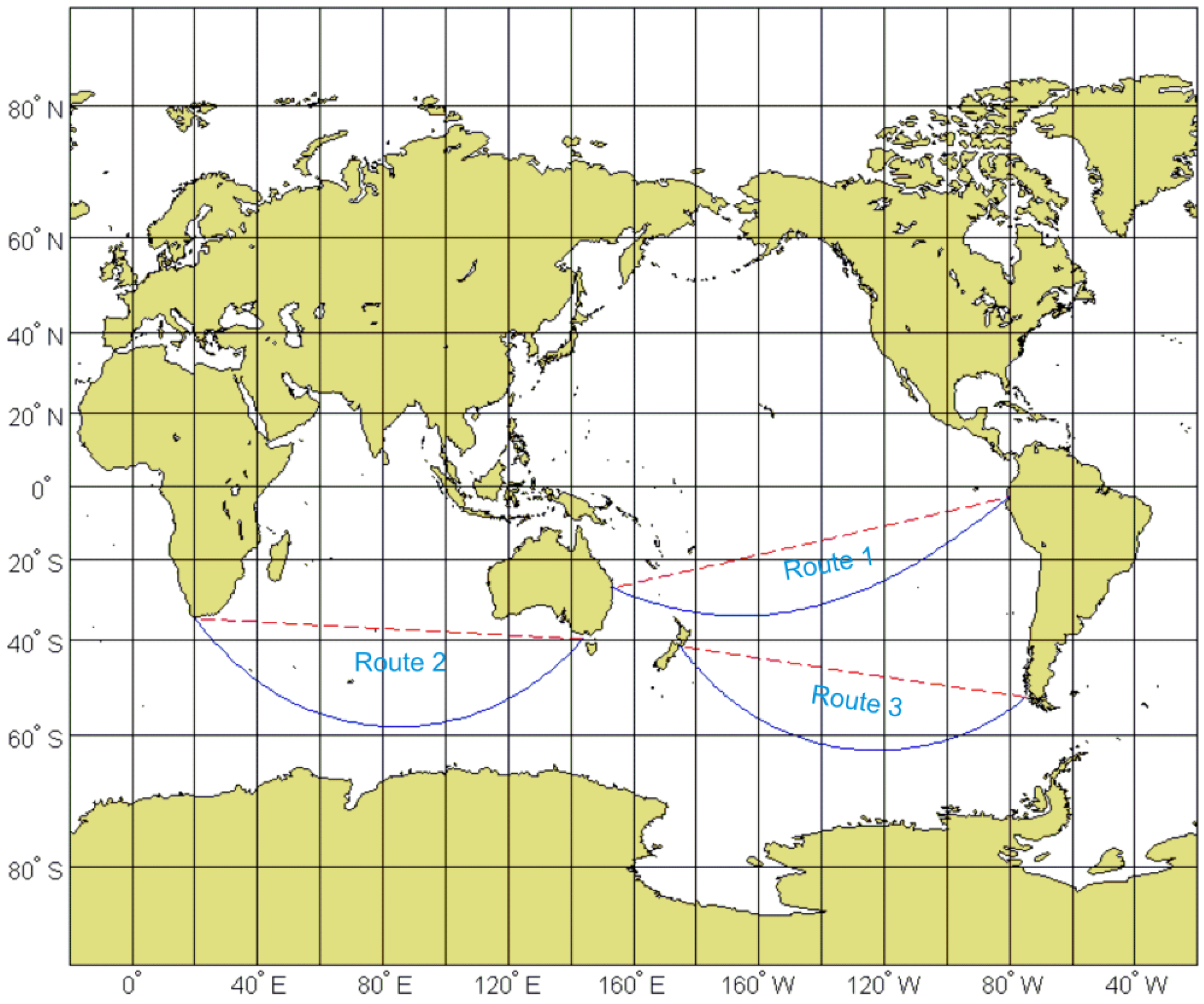
4.2. Assessment of the Shape of Long Navigational Paths
5. Discussion, Conclusions and Proposals
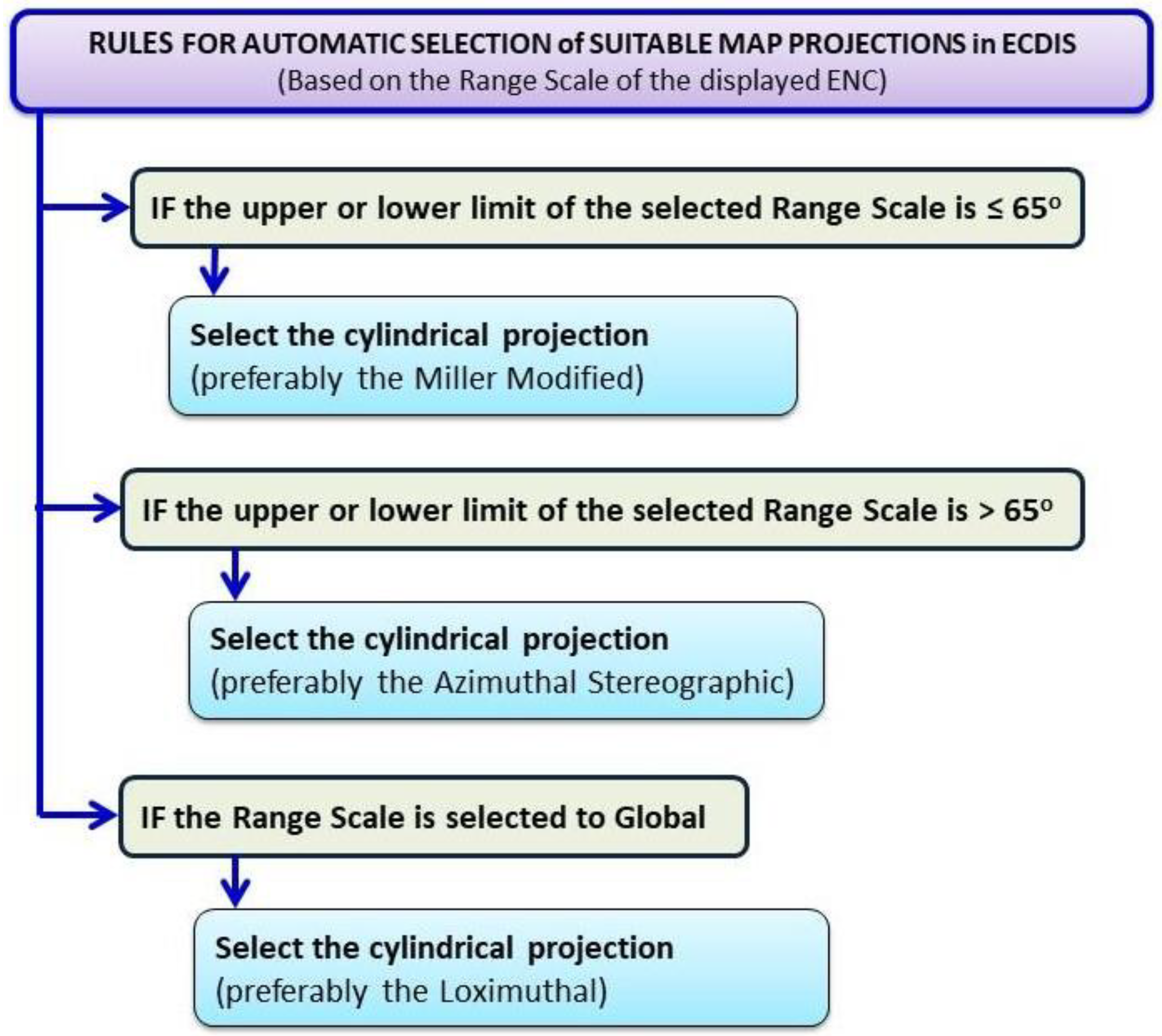
- If the upper or lower limit of the selected Range Scale is ≤ 65°, THEN, the cylindrical projection should be used.
- If the upper or lower limit of the selected Range Scale is ˃ 65°, THEN, the azimuthal projection should be used.
- If the Range Scale is selected to Global, THEN, the pseudocylindrical projection should be used.
Author Contributions
Funding
Conflicts of Interest
References
- International Maritime Organization. Resolution MSC.350(92). Annex 2. Amendments to the International Convention for the Safety of Life at Sea, 1974, as Amended. Chapter V Safety of Navigation. Regulation 19 Carriage Requirements for Shipborne Navigational Systems and Equipment; IMO: London, UK, 2013. [Google Scholar]
- International Hydrographic Organization. Facts About Electronic Charts and Carriage Requirements, Publication S-66, Edition 1.1.0; IHO: Monaco, Monaco, 2018. [Google Scholar]
- International Hydrographic Organization. Regulations of the IHO for International (INT) Charts and Chart Specifications of the IHO, Publication S-4; IHO: Monaco, Monaco, 2018. [Google Scholar]
- International Hydrographic Organization. IHO Transfer Standard for Digital Hydrographic Data Special, Publication S-57, Edition 3.1; IHO: Monaco, Monaco, 2000. [Google Scholar]
- International Hydrographic Organization. Universal Hydrographic Data Model Special, Publication S-100, Edition 4.0.0; IHO: Monaco, Monaco, 2018. [Google Scholar]
- Hecht, H.; Berking, B.; Jonas, M.; Alexander, L. The Electronic Chart—Fundamentals, Functions, Data and Other Essentials, 4th ed.; Geomares Publishing: Lemmer, The Netherlands, 2017. [Google Scholar]
- International Maritime Organization. Performance Standards for Electronic Chart Display and Information Systems (ECDIS), Resolution A817(19); IMO: London, UK, 1995. [Google Scholar]
- International Maritime Organization. Revised Performance Standards for Electronic Chart Display and Information Systems (ECDIS), Resolution MSC 282(82), MSC 82/24/Add.2/Annex 24; IMO: London, UK, 2006. [Google Scholar]
- Becker-Heins, R. ECDIS Basics; Genres Publishing: Lemmer, The Netherlands, 2014. [Google Scholar]
- International Hydrographic Organization. Report on the Results of the ECDIS Survey Conducted by BIMCO and Denmark; IHO: Monaco, Monaco, 2014. [Google Scholar]
- International Maritime Organization. Operating Anomalies Identified within ECDIS, IMO SN.1/Circ.312. 9; IMO: London, UK, 2012. [Google Scholar]
- International Maritime Organization. ECDIS—Guidance for Good Practice, MSC.1-Circ.1503-Rev.1; IMO: London, UK, 2017. [Google Scholar]
- Noris, A. Integrated Bridge Systems Vol. 2. ECDIS and Positioning; The Nautical Institute: London, UK, 2010. [Google Scholar]
- Palikaris, A.; Tsoulos, L. Map projections and visualization of navigational paths in electronic chart systems. In Proceedings of the 3rd International Conference on Cartography and GIS, Nessebar, Bulgaria, 12–15 June 2010. [Google Scholar]
- Weintrit, A. Clarification, Systematization and General Classification of Electronic Chart Systems and Electronic Navigational Charts Used in Marine Navigation. Part 2—Electronic Navigational Charts. Transnav Int. J. Mar. Navig. Saf. Sea Transp. 2018, 12, 769–780. [Google Scholar] [CrossRef] [Green Version]
- Pallikaris, A. Map Projections for Electronic Navigation and other Marine GIS Applications. Int. Hydrogr. Rev. 2012, 8, 7–20. [Google Scholar]
- Arctic Regional Hydrographic Commission. Report of the 2nd Meeting of the Arctic Regional Hydrographic Commission; IHO/ARHC: Monaco, Monaco, 2011. [Google Scholar]
- Arctic Regional Hydrographic Commission. ArHC2-09A INF1, Precautions in using navigational charts in Polar waters—Draft SN1 Circ. In Proceedings of the 2nd ARHC Meeting, Copenhagen, Denmark, 27–29 September 2011. [Google Scholar]
- Skopeliti, A.; Tsoulos, L. Choosing a Suitable Projection for Navigation in the Arctic. Mar. Geod. 2013, 36, 234–259. [Google Scholar] [CrossRef]
- International Hydrographic Organization. Specifications for Chart Content and Display Aspects of ECDIS, Special Publication S-52; IHB: Monaco, Monaco, 2014. [Google Scholar]
- International Hydrographic Organization. ECDIS Presentation Library, Special Publication S-52, Annex A. Edition 4.0.(2); IHO: Monaco, Monaco, 2017. [Google Scholar]
- International Hydrographic Organization. IHO Data Protection Scheme. IHO Publication S-63. Edition 1.2.0; IHO: Monaco, Monaco, 2015. [Google Scholar]
- International Hydrographic Organization. Electronic Navigational Chart Product Specification. Annex A. Data Classification and Encoding Guide, Version 1.0.0; IHO: Monaco, Monaco, 2018. [Google Scholar]
- International Hydrographic Organization. Glossary of ECDIS Related Terms. Special Publication S-32 Appendix 1; IHO: Monaco, Monaco, 2007. [Google Scholar]
- Jenny, B.; Šavrič, B.; Patterson, T. A compromise aspect-adaptive cylindrical projection for world maps. Int. J. Geogr. Inf. Sci. 2015, 29, 935–952. [Google Scholar] [CrossRef]
- Jenny, B. Adaptive composite map projections. IEEE Trans. Vis. Comput. Graph. 2012, 18, 2575–2582. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jenny, B.; Šavrič, B. Combining world map projections. In Choosing a Map Projection. Lecture Notes in Geoinformation and Cartography; Lapaine, M., Usery, E.L., Eds.; Springer: Berlin, Germany, 2017; pp. 203–211. ISBN 978-3-319-51834-3. [Google Scholar]
- Helali, H.; Alesheikh, A.; Hamrah, M. Multi map projection in modern cartography. In Proceedings of the 22nd International Cartographic Conference, La Coruña, Spain, 9–16 July 2005. [Google Scholar]
- Pallikaris, A. Choosing Suitable Map Projections for World-wide Depiction of Electronic Charts in ECDIS. Coordinates 2014, 10, 21–28. [Google Scholar]
- Canters, F. Small-Scale Map Projection Design; Taylor & Francis: London, UK, 2002. [Google Scholar]
- Gosling, P.; Symeonakis, E. Automated map projection selection for GIS. Cartogr. Geogr. Inf. Sci. 2020, 47, 261–276. [Google Scholar] [CrossRef]
- Pearson, F., II. Map Projections: Theory and Applications; CRC Press: Boca Raton, FL, USA, 1990; ISBN 0-8493-6888-X. [Google Scholar]
- Grafarend, E.W.; You, R.-J.; Syffus, R. Map Projections—Cartographic Information Systems; Springer Verlag: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Bugayevskiy, L.M.; Snyder, J.P. Map Projections—A Reference Manual; Taylor & Francis: London, UK, 1998. [Google Scholar]
- Yang, Q.; Snyder, J.P.; Tobler, W.R. Map Projection Transformation, Principles and Applications; Taylor & Francis: London, UK, 2000. [Google Scholar]
- Snyder, J.P. Calculating Map Projections for the Ellipsoid. Am. Cartogr. 1978, 6, 67–76. [Google Scholar] [CrossRef]
- Pallikaris, A. Methods of transforming the ellipsoid of revolution onto the surface of a sphere (in Greek). Nausivios Chora 2014, 4, 137–152. [Google Scholar]
- Snyder, J.P. Map Projections: A working manual. In US Geological Survey Professional Paper 1395; Government Printing Office: Washington, DC, USA, 1987; pp. 86–89. [Google Scholar]
- Maling, D.H. Coordinate Systems and Map Projections, 2nd ed.; George Philip and Son, Pergamon Press: Oxford, UK, 1992. [Google Scholar]
- Snyder, J.P.; Voxland, P.M. An album of map projections. In U.S. Geological Survey Professional Paper 1453; United States Government Printing Office: Washington, DC, USA, 1989. [Google Scholar]
- Haiwara, T. Proposal on the modification of sailing calculations. J. Navig. 1987, 40, 138–148. [Google Scholar] [CrossRef] [Green Version]
- Battersby, S.E.; Finn, M.P.; Usery, E.L.; Yamamoto, K.H. Implications of web Mercator and its use in online mapping. Cartogr. Int. J. Geogr. Inf. Geovis. 2014, 49, 85–101. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1. Map projection selection should be guided by the purpose of the map. |
| 2. The method should produce a unique solution for any application entry. |
| 3. The selected projection must have low overall distortion for the area to be mapped. |
| 4. The method must be applicable to global, continental and regional mapping. |
| 5. The method should work for each set of map projection features. |
| 6. The map maker should be able to evaluate and possibly reject the selected projection. |
| 7. The method should take full advantage of available processing power and possibilities for computer-based interaction. |
| 8. The method should consider user preferences and aesthetics. |
| 1. Coastal navigation and piloting |
| 2. Worldwide or wide-ocean voyage planning |
| 3. Navigation in the Arctic |
| 1. The selection should be guided by the navigational usage displayed on the ECDIS screen ENC |
| 2. The selected projection must have low overall distortion for the ENC area to be displayed on the ECDIS screen |
| 3. The method must be applicable to the global, continental and regional display of ENCs on the ECDIS screen |
| 1. Mercator |
| 2. Plate Carré |
| 3. Cylindrical Equidistant |
| 4. Miller Modified Cylindrical |
| 5. Cylindrical Stereographic |
| 6. Azimuthal Equidistant |
| 7. Azimuthal Stereographic |
| 8. Robinson |
| 9. Loximuthal |
| Selectable Range (Standard Radar Ranges) | Standard Scale (Rounded) |
|---|---|
| 200 NM | 1:3,000,000 |
| 96 NM | 1:1,500,000 |
| 48 NM | 1:700,000 |
| 24 NM | 1:350,000 |
| 12 NM | 1:180,000 |
| 6 NM | 1:90,000 |
| 3 NM | 1:45,000 |
| 1.5 NM | 1:22,000 |
| 0.75 NM | 1:12,000 |
| 0.5 NM | 1:8000 |
| 0.25 NM | 1:4000 |
| Departure Point | Destination Point | |
|---|---|---|
| Route 1 | Brisbane Australia φ= 27° 17′.668 S λ=153° 18′.538 E | Puna Island φ=03° 00′.262 S, λ=080° 15′.934 W |
| Route 2 | South of Cape Agulhas, South Africa φ=34° 59′.185 S, λ=020° 02′.558 E. | King Island, Australia φ=39° 53′.960 S λ=143° 48′.463 E |
| Route 3 | Wellington Harbour φ =41° 36′.536 S λ=174° 50′.571 E | Magellan Straight φ=52° 38′.057 S λ= 074° 38′.292 |
| Projection | Navigational Usage |
|---|---|
| Miller Modified Cylindrical projection with standard parallel at 30°. | All navigational applications except navigation in the arctic and subarctic |
| Azimuthal stereographic | Navigation in the arctic and subarctic and display of very long navigational routes |
| Loximuthal pseudocylindrical | Worldwide display of very long navigational routes |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Palikaris, A.; Mavraeidopoulos, A.K. Electronic Navigational Charts: International Standards and Map Projections. J. Mar. Sci. Eng. 2020, 8, 248. https://doi.org/10.3390/jmse8040248
Palikaris A, Mavraeidopoulos AK. Electronic Navigational Charts: International Standards and Map Projections. Journal of Marine Science and Engineering. 2020; 8(4):248. https://doi.org/10.3390/jmse8040248
Chicago/Turabian StylePalikaris, Athanasios, and Athanasios K. Mavraeidopoulos. 2020. "Electronic Navigational Charts: International Standards and Map Projections" Journal of Marine Science and Engineering 8, no. 4: 248. https://doi.org/10.3390/jmse8040248
APA StylePalikaris, A., & Mavraeidopoulos, A. K. (2020). Electronic Navigational Charts: International Standards and Map Projections. Journal of Marine Science and Engineering, 8(4), 248. https://doi.org/10.3390/jmse8040248