Self-Excited Torsional Vibration in the Flexible Coupling of a Marine Propulsion Shafting System Employing Cardan Shafts



Abstract
:1. Introduction
2. Materials and Methods
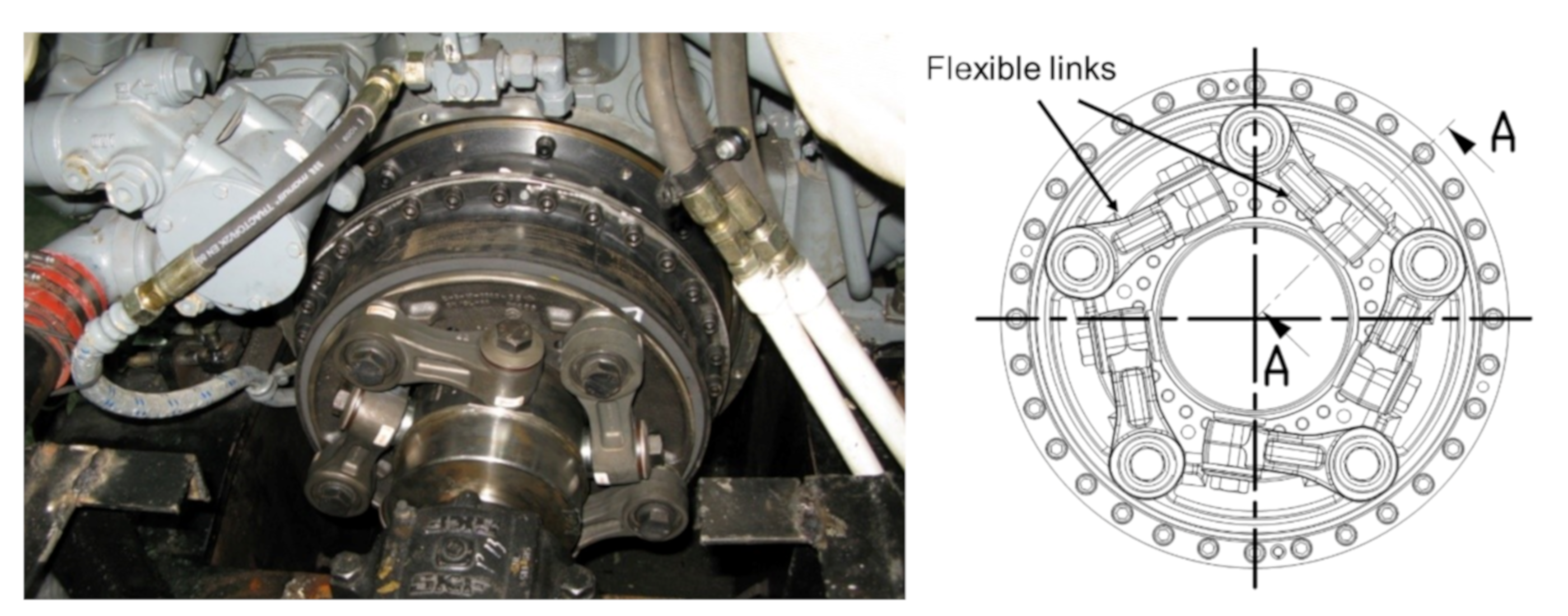
2.1. Case Study
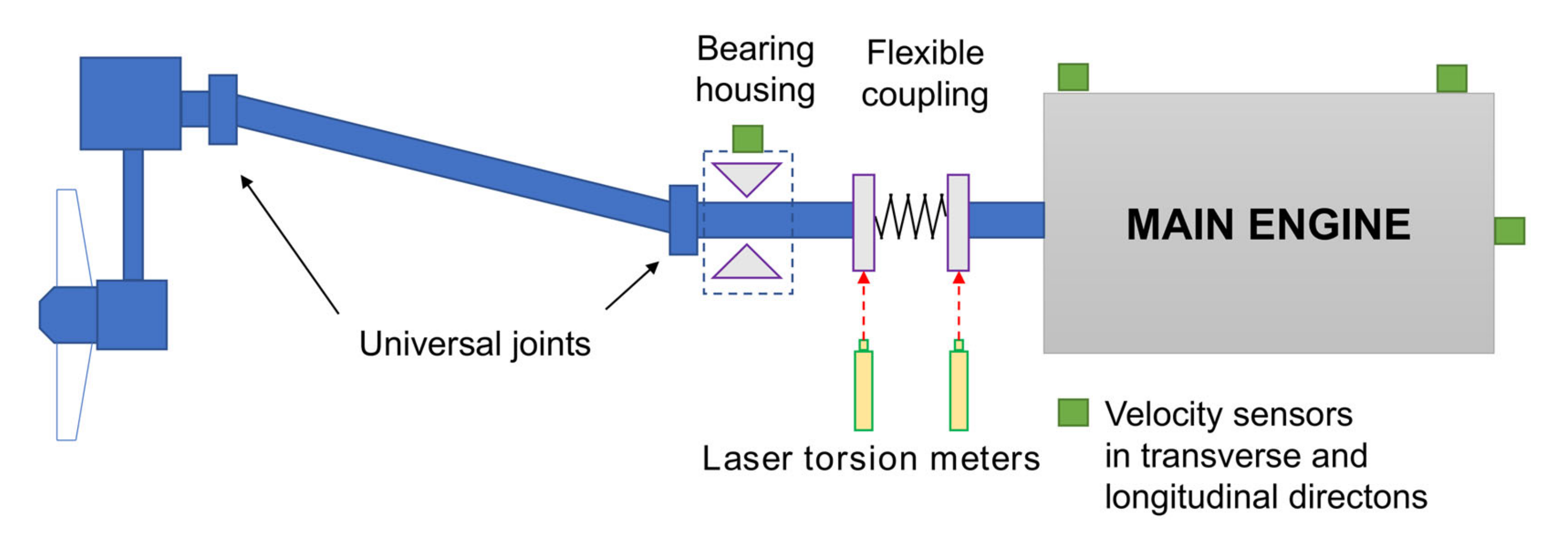
2.2. Vibration Measurements
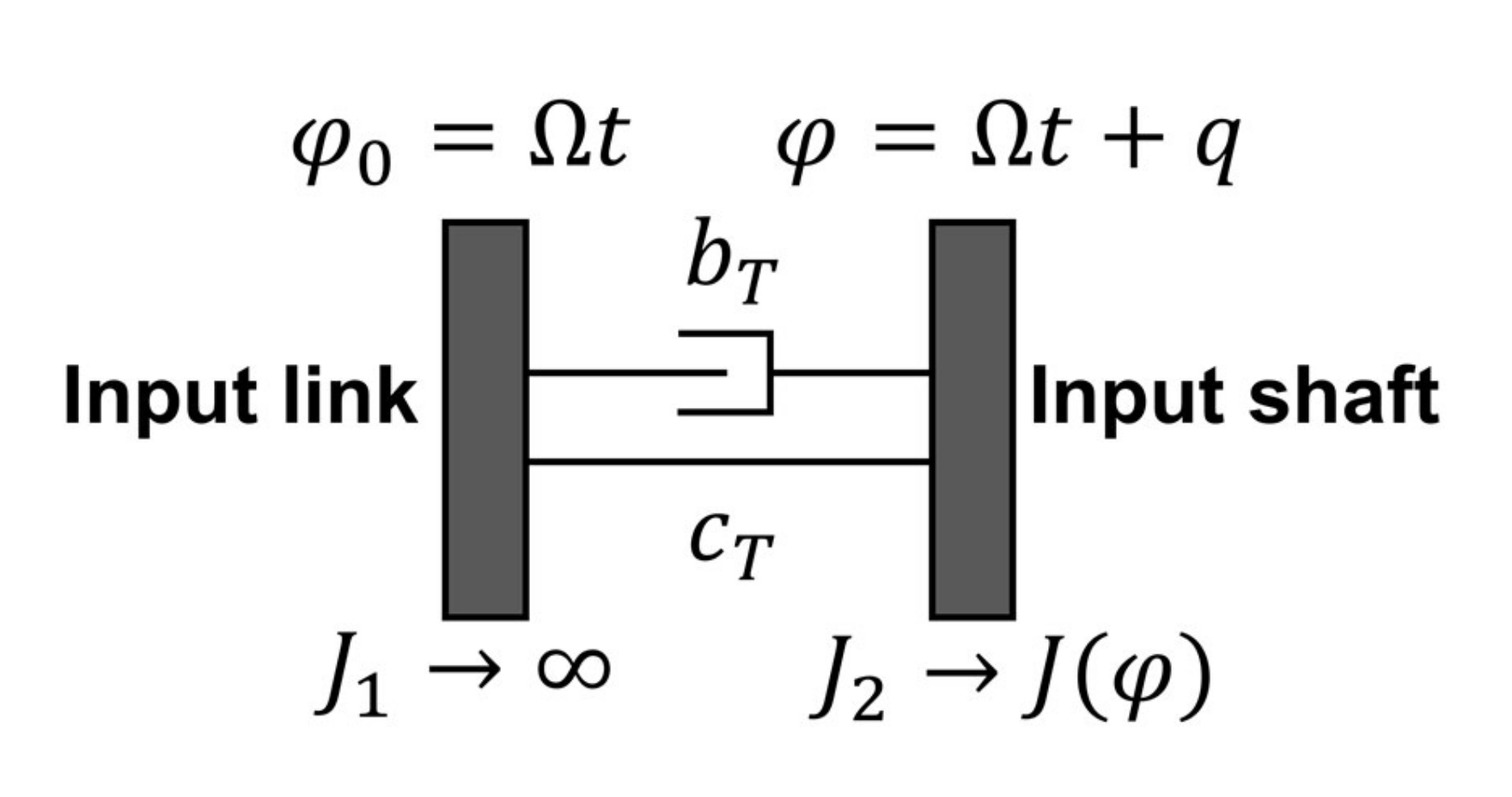
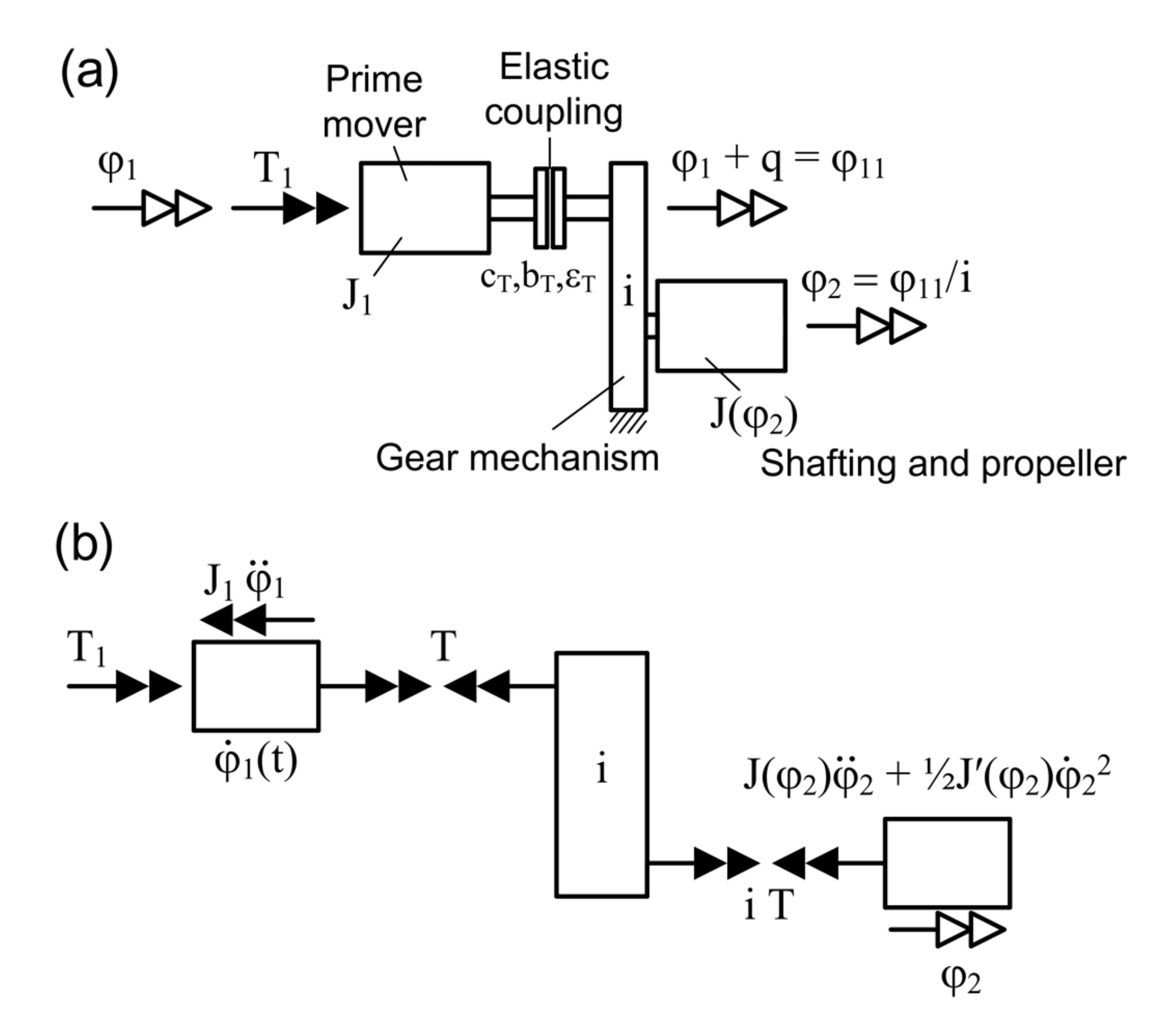
2.3. Self-Excited Torsional Vibration Theory
3. Results and Discussion
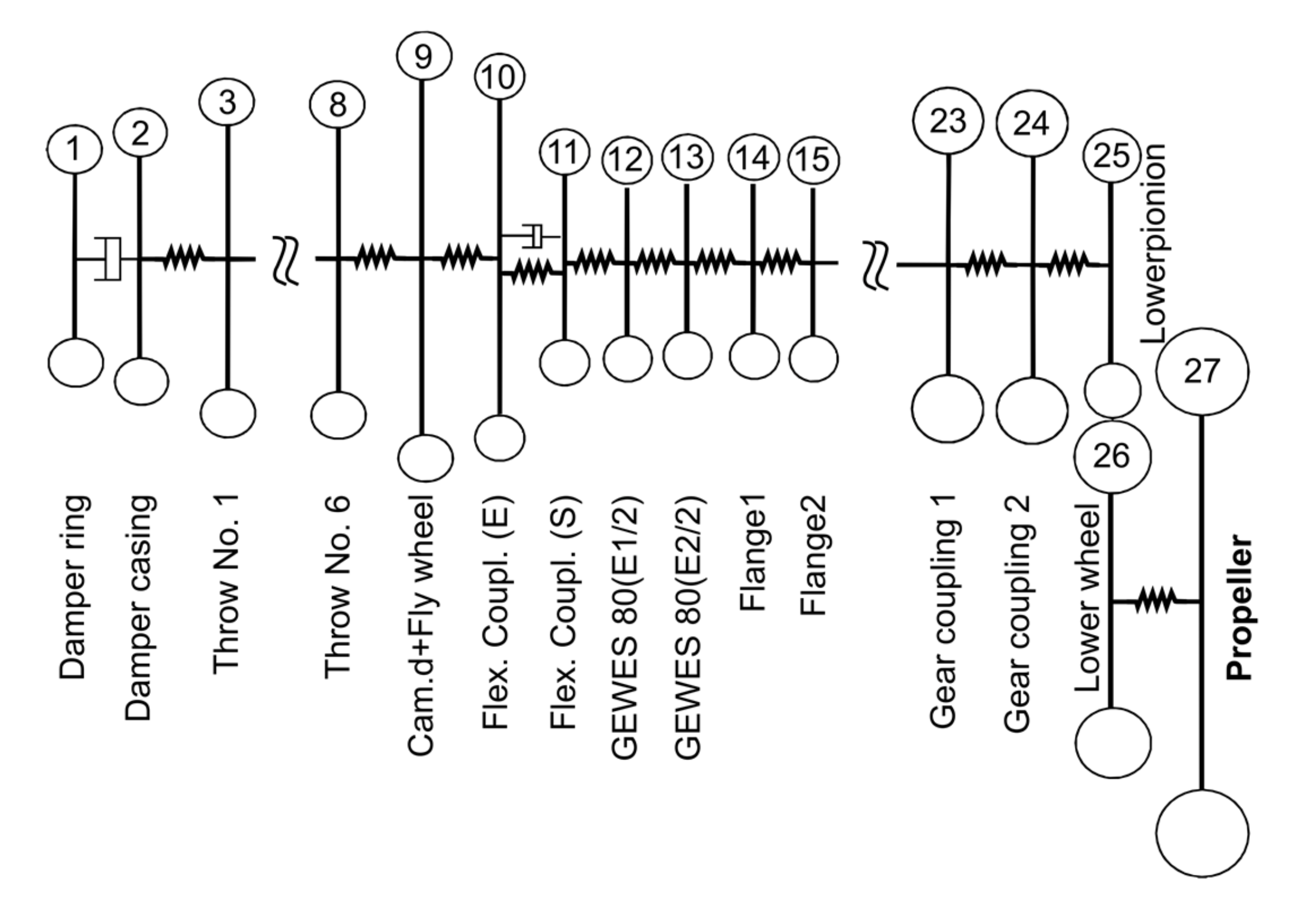
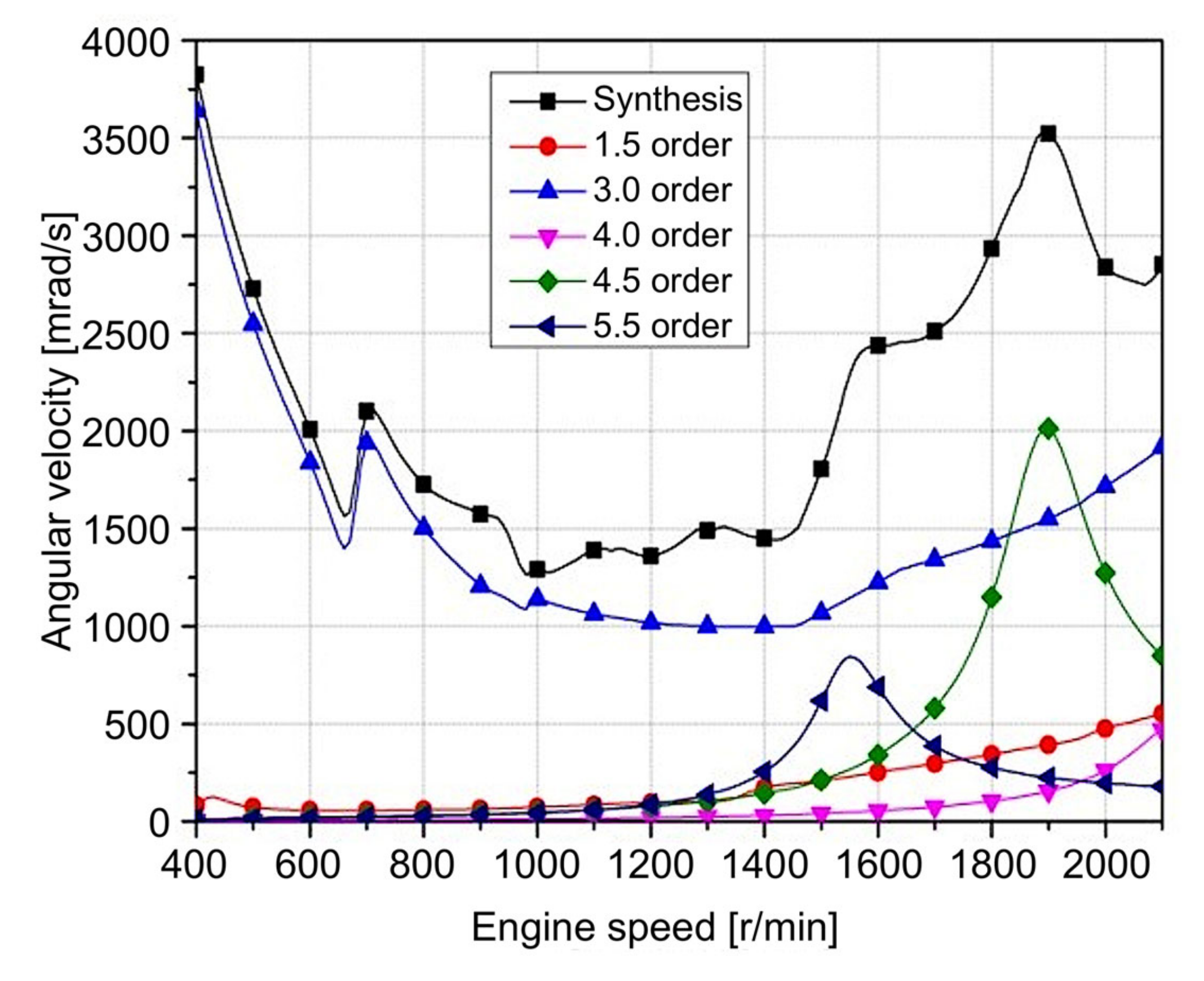
3.1. Torsional Vibration Calculations
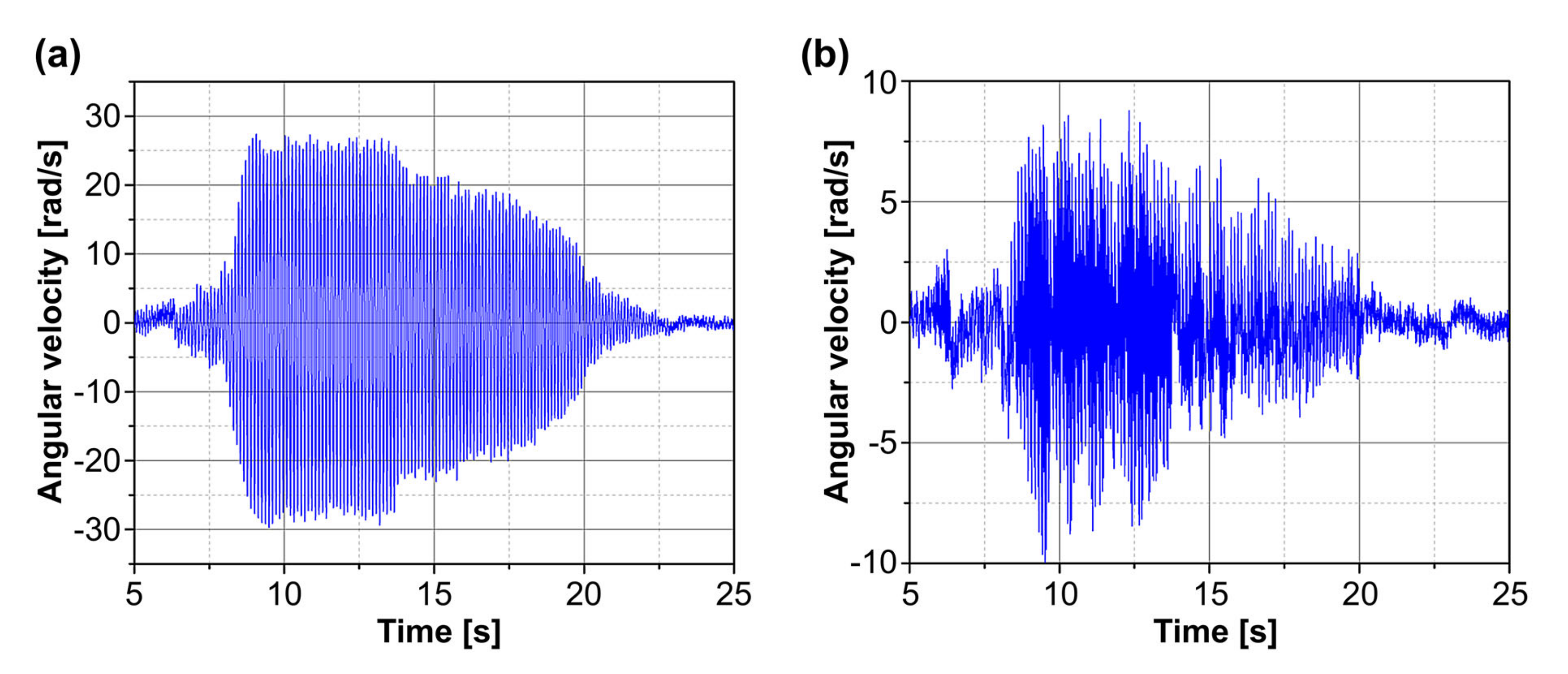
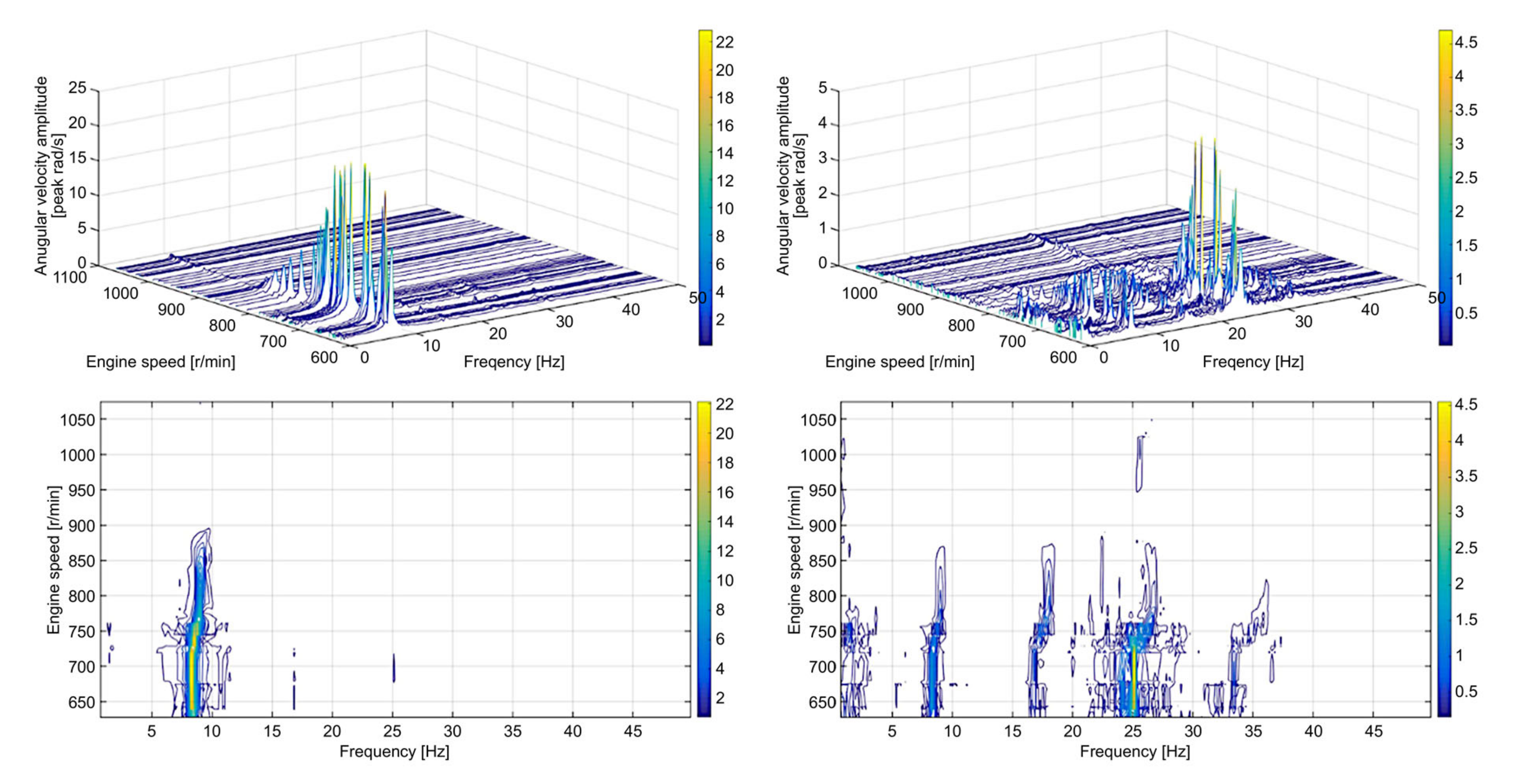
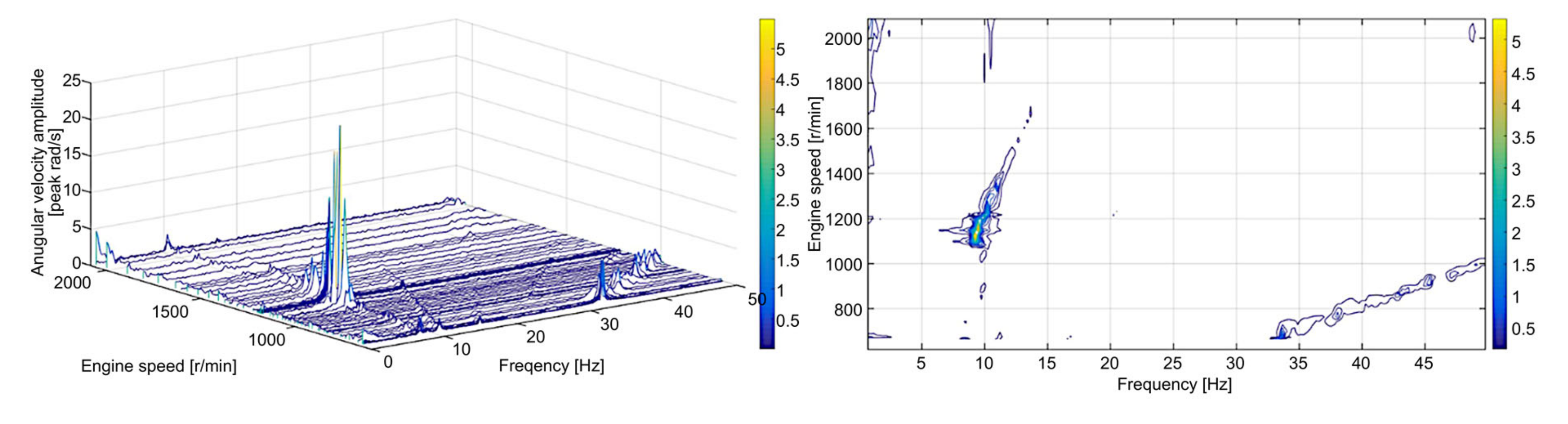
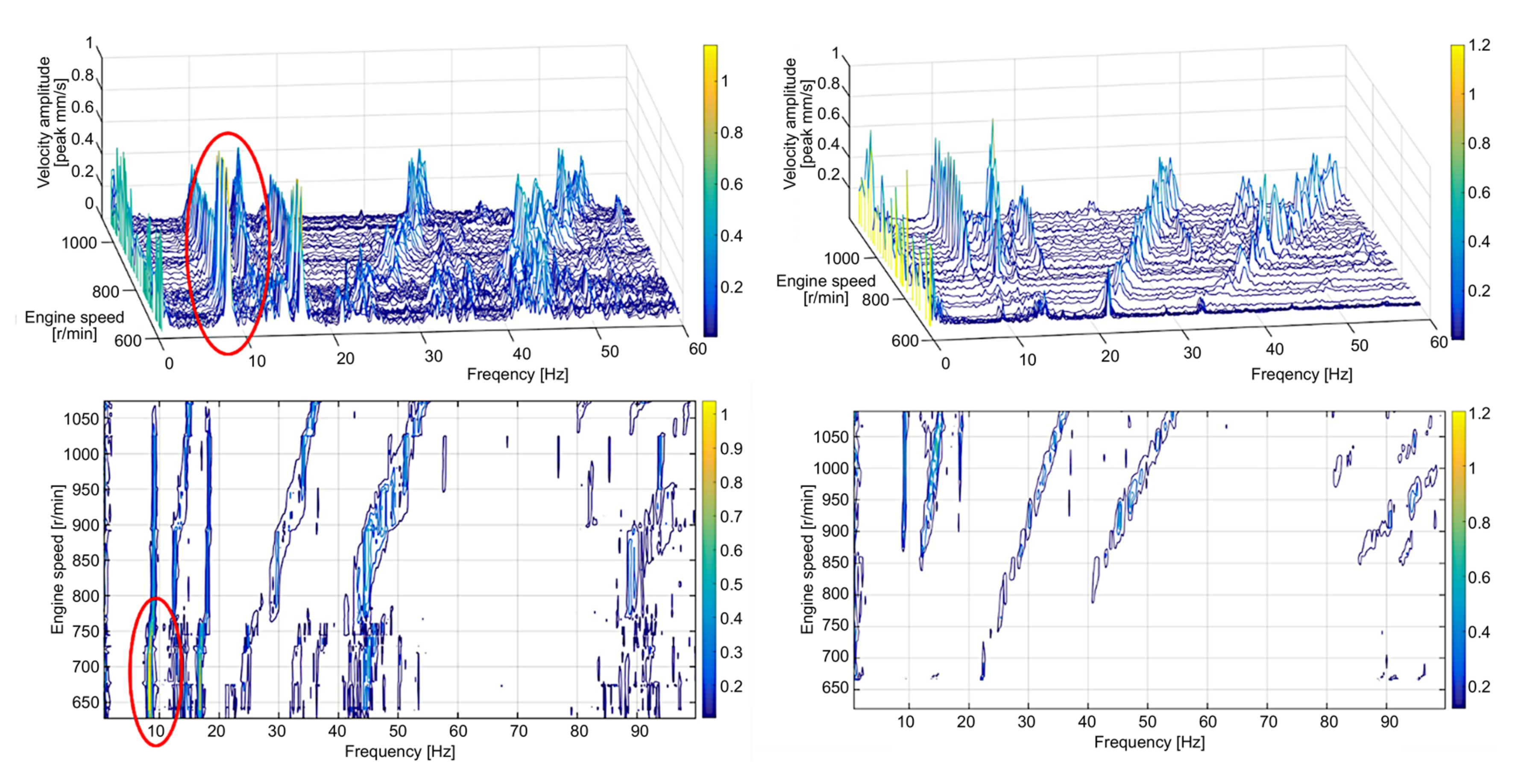
3.2. Vibrational Measurements
4. Conclusions
- (1)
- The torsional vibration calculation was performed to find out the resonance frequencies with estimated amplitudes but nothing abnormal was issued. It confirms the possibility of the SETV which began spontaneously and independently of the engine speed. The flexible coupling was repeatedly broken during operation, and the SETV amplitude rapidly increased. The dominant vibration mode occurred for approximately 15 s and then disappeared. During the occurrence of SETVs, the engine body’s structural vibrations were also intense.
- (2)
- The SETV is attributed to the friction torque from the Cardan shaft universal joint. The friction loss during power transmission acted as an excitation force, which resulted in SETV on the driven side; then, failure occurred. Therefore, it is recommended that the friction effects on Cardan shafts are considered in the design stage of propulsion shafting system development.
- (3)
- For a power transmission system using Cardan shafts, such as the propulsion system considered in this study, an elastic coupling should be used because it offers more radial flexibility for inhibiting the SETV effects. For the vessel considered herein, the new flexing coupling provides a high degree of control to all angular, axial, and radial shaft displacements. After replacement, dominant SETV modes were not observed.
- (4)
- Owing to inadequate measurement, friction torque was only detected through the structural vibration of the bearing housing. In future work, appropriated experiments should be conducted for the Cardan shaft joint. The friction torque can be investigated using the relative torsion angle achieved by the torques or angular velocities measured on the two sides of the universal joint.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| a1 | angular acceleration at driving yoke of Cardan shaft (rad/s2) |
| a2 | angular acceleration at driven yoke of Cardan shaft (rad/s2) |
| bT | torsional damping constant (N·m·s/rad) |
| cT | torsional stiffness constant (N·m/rad) |
| J0 | moment of inertia for driven shafting (kg·m2) |
| J1 | moment of inertia for driving shafting (kg·m2) |
| J | reduced moment of inertia (kg·m2) |
| transmission ratio of reduction gear | |
| relative twist angle (rad) | |
| restoring torque of elastic coupling (N·m) | |
| input torque of driving side (N·m) | |
| : | angular displacement (rad) |
| operation angle of Cardan shaft (rad) | |
| decay rate (decays/s) | |
| characteristic parameter of nonlinearity | |
| : | frequency ratio |
| pulsation depth of moment of inertia | |
| time (s) | |
| rotational motion (rad) | |
| constant angular velocity (rad/s) | |
| angular velocity at driving yoke of Cardan shaft (rad/s) | |
| angular velocity at driven yoke of Cardan shaft (rad/s) | |
| : ) | natural circular frequency of liner undamped oscillator (rad/s). |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Damper | Type | Viscous |
| Diameter × Width | 330 × 51 mm | |
| Effective inertia | 0.2372 kg × m2 | |
| Ring inertia | 0.2344 kg × m2 | |
| Weight | 22 kg | |
| Flexible Coupling | Type | VULASTIK L2611S |
| Torsional stiffness (0–100% load) | 6.9–19.5 kN × m/rad | |
| Permissible maximum & vibratory torque | 3.95 and 1.0 kN × m | |
| Constant kappa | 0.18 | |
| Nominal torque | 3.15 kN × m | |
| Engine | Type | D2842 LE405 |
| Cylindrical Bore × stroke | 128 × 142 mm | |
| Power at MCR | 662 kW × 2,100 r/min | |
| Pmi at full load | 20.4 bar | |
| Nominal torque | 3.02 kN × m | |
| Reciprocating mass | 4.66 kg/cyl | |
| Firing order | 1-12-5-8-3-10-6-7-2-11-4-9 | |
| Diameter of crank shaft | 90 mm | |
| Connection ratio (r/l) | 0.277 | |
| Minimum speed | 600 r/min | |
| Weight | 1.79 ton | |
| Intermediate Shaft | Diameter | 80 mm |
| Length | Approximately 11 m | |
| Propeller | Type | Azimuth thruster |
| Reduction ratio | 4.7143:1 | |
| Diameter | 1.850 mm | |
| No. of blade | 4 ea. | |
| M.O.I. | 52.0 kg × m2 (in air) |
References
- Spelsberg-Korspeter, G. Structural optimization for the avoidance of self-excited vibrations based on analytical models. J. Sound Vib. 2010, 329, 4829–4840. [Google Scholar] [CrossRef]
- Wu, C.; Chen, F.; Long, X. The self-excited vibration induced by friction of the shaft-hull coupled system with the water-lubricated rubber bearing and its stick-slip phenomenon. Ocean Eng. 2020, 198, 107002. [Google Scholar] [CrossRef]
- Zhao, X.N.; Chen, G.X.; Lv, J.Z.; Zhang, S.; Wu, B.W.; Zhu, Q. Study on the mechanism for the wheel polygonal wear of high-speed trains in terms of the frictional self-excited vibration theory. Wear 2019, 426, 1820–1827. [Google Scholar] [CrossRef]
- Cui, X.; Chen, G.; Zhao, J.; Yan, W.; Ouyang, H.; Zhu, M. Field investigation and numerical study of the rail corrugation caused by frictional self-excited vibration. Wear 2017, 376, 1919–1929. [Google Scholar] [CrossRef]
- Charroyer, L.; Chiello, O.; Sinou, J.-J. Self-excited vibrations of a non-smooth contact dynamical system with planar friction based on the shooting method. Int. J. Mech. Sci. 2018, 144, 90–101. [Google Scholar] [CrossRef] [Green Version]
- Yan, F.; Luo, C.; Zhu, R.; Wang, Z. Experimental and numerical study of a horizontal-vertical gas-solid two-phase system with self-excited oscillatory flow. Adv. Powder Technol. 2019, 30, 843–853. [Google Scholar] [CrossRef]
- Chen, Z.; Tse, K.T.; Kwok, K.C.S.; Kim, B.; Kareem, A. Modelling unsteady self-excited wind force on slender prisms in a turbulent flow. Eng. Struct. 2020, 202, 109855. [Google Scholar] [CrossRef]
- Purohit, A.; Darpe, A.K.; Singh, S.P. Experimental investigations on flow induced vibration of an externally excited flexible plate. J. Sound Vib. 2016, 371, 237–251. [Google Scholar] [CrossRef]
- Davim, J.P. Modern Machining Technology: A Practical Guide, 1st ed.; Woodhead Publishing: Cambridge, UK, 2011. [Google Scholar]
- Lee, D.C.; Barro, R.D.; Kim, J.S. A Case Study for the Resonance of Marine Propulsion Shaft System Excited by Diesel Engine. In Volume 4: Dynamics, Control, and Uncertainty, Parts A and B, Proceedings of the ASME 2012 International Mechanical Engineering Congress and Exposition, Houston, TX, USA, 9–15 November 2012; ASME: New York, NY, USA, 2012. [Google Scholar] [CrossRef]
- Lee, D.C.; Yu, J.D. Transient and Unstable Torsional Vibrations on a 4-Stroke Marine Diesel Engine. In Design, Application, Performance, and Emissions of Modern Internal Combustion Engine Systems and Components, Proceedings of the ASME 2003 Internal Combustion Engine Division Spring Technical Conference, Salzburg, Austria, 11–14 May 2003; ASME: New York, NY, USA, 2003. [Google Scholar] [CrossRef]
- Lee, D.C.; Barro, R.D. Self-Excited Vibration in a Specialized Electric Propulsion System. MTZ 2014, 4, 54–59. [Google Scholar] [CrossRef]
- Lee, D.C.; Vuong, Q.D.; Nam, T.K. Torsional Vibration Phenomenon due to Pulse Torque of Variable Speed Induction Motor on Rotating Systems. Trans. Korean Soc. Noise Vib. Eng. 2015, 25, 414–419. [Google Scholar] [CrossRef] [Green Version]
- Korean Register. Broken Propulsion Shaft Investigation Report on the Ship Name ‘Haeryong’; Korean Register Technical Report; Korean Register: Busan, Korea, 2003. [Google Scholar]
- Al-Hussain, K.M. Dynamic Stability of Two Rigid Rotors Connected by a Flexible Coupling with Angular Misalignment. J. Sound Vib. 2003, 266, 217–234. [Google Scholar] [CrossRef]
- Hylarides, S.; van Oossanen, P. Some Hydrodynamic Considerations of Propeller-Induced Ship Vibrations. In Proceedings of the SNAME Symposium on Ship Vibration, Arlington, VA, USA, 16–17 October 1978. [Google Scholar]
- Ghoneim, H.; Lawrie, D.J. Dynamic Analysis of a Hyperbolic Composite Coupling. J. Sound Vib. 2007, 301, 43–58. [Google Scholar] [CrossRef]
- Dresig, H.; Holzweißig, F.; Grosskopfand, W.; Esche, S. Dynamics of Machinery: Theory and Applications; Springer: Heidelberg, Germany; New York, NY, USA, 2010. [Google Scholar]
- Vulkan Couplings. VULASTIK L Technical Data; VULKAN Kupplungs- und Getriebebau Bernhard Hackforth GmbH & Co. KG: Herne, Germany, 2011. [Google Scholar]
- Hyundai Heavy Industries, Co. Ltd. Engine & Machinery Division. Dynamic Characteristic and Performance of Tuning Torsional Vibration Damper for Hyundai-MAN B&W, Two Stroke Low-Speed Diesel Engine. In MAN B&W Diesel A/S- 14th Meeting of Licensees; Hyundai Heavy Industries, Co. Ltd. Engine & Machinery Division: Copenhagen, Denmark, 1993. [Google Scholar]
- Gang, C. Handbook of Friction-Vibration Interactions, 1st ed.; Woodhead Publishing: Cambridge, UK, 2014; pp. 153–305. [Google Scholar] [CrossRef]
- Saigo, M.; Okada, Y.; Ono, K. Self-excited Vibration Caused by Internal Friction in Universal Joints and Its Stabilizing Method. J. Vib. Acoust. 1997, 119, 221–229. [Google Scholar] [CrossRef]


| Mode | Calculated | Measured | Remarks |
|---|---|---|---|
| 1-node | 631 | 522 | by self-excited vibration |
| 2-node | 2.051 | 1.980 | by 3rd order at 660 r/min |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, M.-H.; Nam, T.-K.; Lee, J.-u. Self-Excited Torsional Vibration in the Flexible Coupling of a Marine Propulsion Shafting System Employing Cardan Shafts. J. Mar. Sci. Eng. 2020, 8, 348. https://doi.org/10.3390/jmse8050348
Song M-H, Nam T-K, Lee J-u. Self-Excited Torsional Vibration in the Flexible Coupling of a Marine Propulsion Shafting System Employing Cardan Shafts. Journal of Marine Science and Engineering. 2020; 8(5):348. https://doi.org/10.3390/jmse8050348
Chicago/Turabian StyleSong, Myeong-Ho, Taek-Kun Nam, and Jae-ung Lee. 2020. "Self-Excited Torsional Vibration in the Flexible Coupling of a Marine Propulsion Shafting System Employing Cardan Shafts" Journal of Marine Science and Engineering 8, no. 5: 348. https://doi.org/10.3390/jmse8050348